Reserving Charging Decision-Making Model and Route Plan for Electric Vehicles Considering Information of Traffic and Charging Station


College of Energy and Electrical Engineering, Hohai University, Nanjing 211100, China
*
Author to whom correspondence should be addressed.
Sustainability 2018, 10(5), 1324; https://doi.org/10.3390/su10051324
Submission received: 27 March 2018
/
Revised: 21 April 2018
/
Accepted: 22 April 2018
/
Published: 25 April 2018
(This article belongs to the Section Sustainable Transportation)
Abstract
:With the advance of battery energy technology, electric vehicles (EV) are catching more and more attention. One of the influencing factors of electric vehicles large-scale application is the availability of charging stations and convenience of charging. It is important to investigate how to make reserving charging strategies and ensure electric vehicles are charged with shorter time and lower charging expense whenever charging request is proposed. This paper proposes a reserving charging decision-making model for electric vehicles that move to certain destinations and need charging services in consideration of traffic conditions and available charging resources at the charging stations. Besides, the interactive mechanism is described to show how the reserving charging system works, as well as the rolling records-based credit mechanism where extra charges from EV is considered to hedge default behavior. With the objectives of minimizing driving time and minimizing charging expenses, an optimization model with two objective functions is formulated. Then the optimizations are solved by a K shortest paths algorithm based on a weighted directed graph, where the time and distance factors are respectively treated as weights of corresponding edges of transportation networks. Case studies show the effectiveness and validity of the proposed route plan and reserving charging decision-making model.
1. Introduction
The shortage of global energy and ever-increasing ecological environment crisis have promoted the development of electric vehicles (EV). Compared with traditional cars, electric vehicles consume electric energy rather than fossil fuel, showing great advantages in relieving pressure on traditional energy as well as cutting down on greenhouse gas emissions. In coordination with the global propaganda of energy-saving and emission-reduction, governments of the United States, European countries, Japan, and China all have issued a packet of policies to encourage the development and application of electric vehicles. In addition, car companies have also continued to devote to the research and development of electric vehicle techniques. In recent years, remarkable achievements have been made in battery, electric machinery, and relevant infrastructures and so on, and an increasing quantity of electric vehicles in many countries has begun to take shape [1].
In spite of the profound meaning of using electric vehicles instead of cars powered by fossil fuels, the mileage range of electric vehicles is short due to limited battery capacity [2], which proves to be a restriction on development of EV. In addition, for EV users, except for the cost of buying an electric vehicle, what matters most is the charging expenses and convenience of getting charging service whenever they need it while driving on the road. While making reserving charging decisions and route selections, the top two factors that have decisive influence on users’ decision-making results are energy cost, which is related to driving distance and charging price, and time consumption, respectively.
In this paper, focusing on an EV that is moving to a certain destination and in need of charging service, characteristics of traffic conditions, charging resources and the EV are analyzed to lay a foundation for its reserving charging decision-making and route plan. To achieve an optimal reserving charging strategy and route selection from initial position to destination passing by a charging station, an optimization model with two objective functions is established, including minimum charging expense and minimal time consumption. Meanwhile, to encourage EVs to obey reservations, a rolling records credit mechanism is designed using an exponential function, meaning that charging stations are allowed to ask for extra charges from EVs with default behavior records to hedge financial risks caused by EVs canceling a reservation. Then, through transforming transport network into a weighted directed graph, route plans with different energy/money cost and time consumption are obtained using K shortest paths algorithm.
The contributions of this paper are as follows:
- (1)
- The proposed reserving charging decision-making model simultaneously involves the information of traffic conditions, charging resources and charging prices, as well as charging and moving performance of electric vehicles, so that charging reservations and route plans are more feasible.
- (2)
- Considering both energy consumption and time consumption from the initial position to the destination passing by a charging station, an optimization model with two objective functions is established. In this way, to obtain feasible solution set of optimizations, the weight of each graph edge of traffic network is respectively set as driving time and driving distance.
The rest of this paper is organized as follows: Section 2 presents background of reserving charging strategy and route plan for electric vehicles. Section 3 analyzes characteristics of transportation network, charging stations and electric vehicles. Section 4 presents the information interactive mechanism and the rolling credit mechanism. Section 5 proposes the reserving charging decision-making model, with the goal of respectively minimizing time consumption and minimizing charging expense from initial position to destination passing by a chosen charging station. Section 6 describes the solving procedure of proposed optimization problem based on weighted directed graph and K shortest paths algorithm. Case study results are shown in Section 7, and Section 8 provides the conclusions.
2. Background
Research on electric vehicles in power systems can be divided into several groups roughly. Some papers focus on interaction between electric vehicles and power systems, mainly the impacts of EV’s charging/discharging behavior on power systems [3,4,5] or optimal dispatch of power systems considering EVs as special energy storage devices [6,7]. There is also research on coordinated dispatch of EVs and renewable energy so that utilization of renewable energy could be improved [8]. In these papers aforementioned, charging characteristics of a group of EVs have been considered, but charging strategies of a certain EV are not focused from the perspectives of EV users.
Another research direction of EV charging is through regulation and coordinated control of EVs charging behavior, by either direct control over the switches of charging piles and charging rate [6,9], or incentives and regulation of charging prices [10] or combing the EV user’s charging strategy with network loss or network constraints together [11,12] to realize coordinated EVs charging, thus lowering impacts exerted on power system reliability. However, in this research, optimal charging behavior and route planning for EV users is not studied specifically.
Another common study related to our work in this paper is on charging strategies and route plans of EVs. In [13] a real-time solution of the time-constrained energy optimal navigation problem is proposed using the real-time traffic information flow provided by SYTADIN. In [14], a framework for energy-driven and context-aware route planning for fully electric vehicles is proposed, in which, both time and energy-efficiency are accounted for through real-time access to traffic information. In paper [15], three cases are studied, that is the EV has no charging request, the EV has only one charging request and the EV has more than one times charging requests with bi-objectives of minimizing driving time and shortest driving distance. In [16], considering time-of-use price, optimal charging strategy of the EV user with different time and mileages is studied, giving maximum and minimum charging fees for types of EVs at different moment and mileages. A reserving charging agreement between an EV and charging resources is formulated in [17], in order to minimize waiting time of the EV before getting charging service as well as balancing loads of charging resources. However, the traffic condition is not taken into consideration and optimal route to get to charging resources is not studied. In [18], both charging expenses and driving costs are focused on to achieve optimal route. In [19], a reserving charging auction model is addressed so that optimal allocation of charging resources among different EVs can be realized, and also the privacy of EV users are protected during the course of bidding for charging resource reservation. In [20], considering the occurrence of some charging piles break down, a route selection and reserving charging system is proposed on the basis of existing charging resources distribution, with the expectation of providing charging services for more EVs. In [21], uncertain traffic conditions while the EV is driving are taken into account and then a reserving charging strategy is presented to minimize waiting time before getting charged when the EV gets to the charging station.
For most of the literature above, information of traffic conditions, EV battery and reservations of charging stations are not taken into consideration simultaneously while making reserving charging decisions, which obviously deserves more attention and will benefit EV users more in many ways. Besides, default behaviors of EV users in reserving charging system is rarely mentioned in existing works.
3. Characteristics of Transportation Network, Charging Stations and Electric Vehicles
For an electric vehicle that is moving to a certain destination and in need of charging service, the driver needs to select an optimal charging station associated with a route plan. When making route planning and making decisions on which charging station to go, to achieve a scheme with either minimal time consumption or minimal driving distance, all the information of traffic, EV battery and charging stations should be taken into consideration simultaneously.
3.1. Transportation Network Model
Transportation network models are supposed to represent the available route and traffic conditions on every road segment. A transportation network model includes the topology structure of traffic networks, maximum traffic volume, and maximum speed limits of road segments and so on. The topology structure model of transportation networks shows the connection status between transport nodes, lengths of road segments and one-way/two-way characteristics, which can be expressed as:
where p and q denote two nodes in the transportation network, . N is the set of all transportation nodes, including physical road junctions, and virtual mode of position of charging stations, initial position of the EV and destination. (p,q) denotes the road segment from node p to node q. is the length of road segment (p,q), namely, driving distance.
If road segment (p,q) is a two-way road, then:
If road segment (p,q) is a one-way road, then:
which means that only driving in the direction of node p to node q is permitted and driving in opposite direction is forbidden.
3.2. Charging Station Model
Charging station characteristics consist of the information of available charging piles, waiting time of the EV at this charging station and its real-time charging prices. Each charging station timely updates information of available charging piles, as well as its real-time charging prices. The reservation information for each charging pile includes starting time and finishing time of all predestinate charging process.
3.2.1. Available Charging Piles
Suppose that there are Ji charging piles at i-th charging station. We use a status variable uj(t) to represent the state of j-th charging pile at time t. When uj(t) = 0, it means that the j-th charging pile is being used or has been reserved for using at time t. When uj(t) = 1, it means that the j-th charging pile is available at time t.
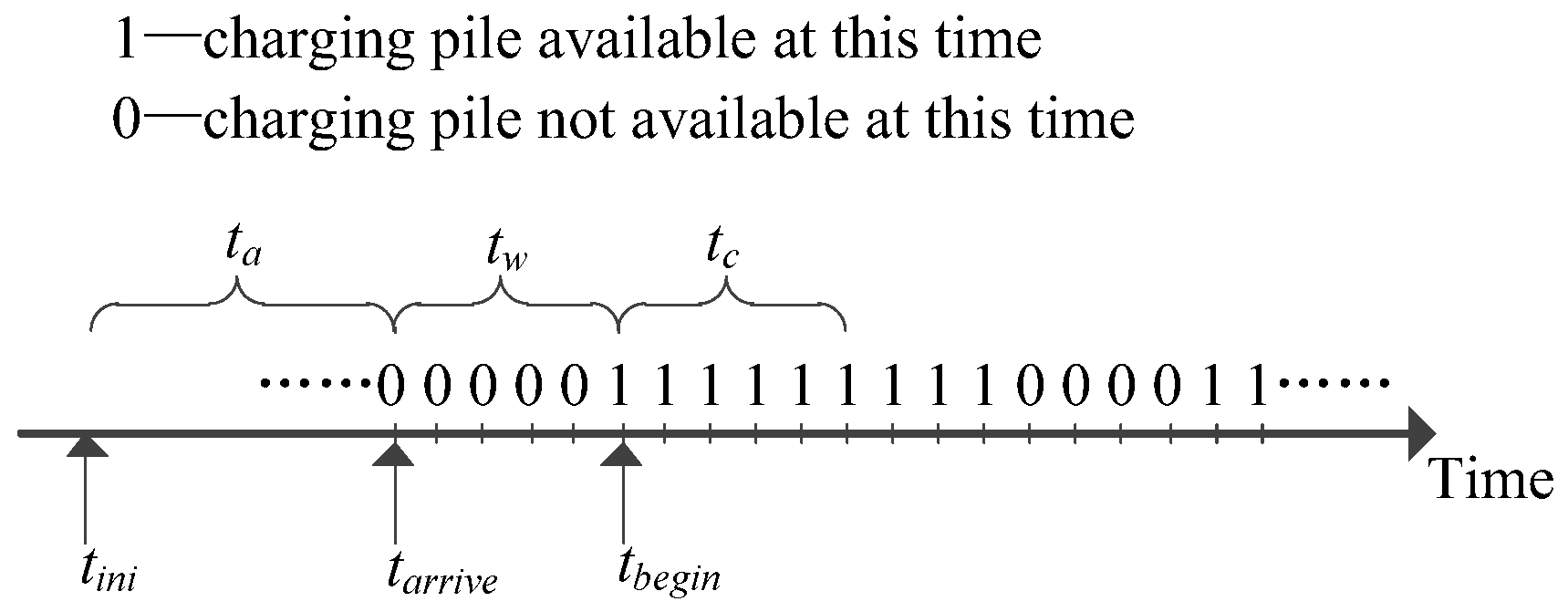
3.2.2. Minimal Waiting Time at Charging Stations
The minimal waiting time in charging station i, denoted by tw, means the time period from the moment when the EV arrives at the charging station i to the moment when it gets charged. If charging resources are sufficient, the EV can get charged as soon as it gets to the charging station, however, if charging resources are in short supply, the EV may have to wait (see Figure 1). Waiting time at the charging station is a non-negligible proportion of total time consumption especially when charging resources are limited.
Waiting time tw is determined jointly by both the usage and reservations condition of all charging piles at station i and charging time of target EV. During the period from the moment the EV gets to the station to T, if it exists continuously available time interval of charging pile j which is longer than charging time tc, then charging pile j is considered as an available resource, and waiting time at charging pile j can be calculated as:
where is the waiting time at charging pile j, , tarrive and are the moment when the EV user proposes charging request, arrives at this charging station and the beginning time of this available charging time interval. ta is driving time from initial position to this charging station.
If more than one charging piles are available at charging station i, take the shortest waiting time among all charging piles as the waiting time at station i, and corresponding charging pile is the target charging pile.
3.2.3. Charging Prices
The charging price of EVs at the centralized charging station consists of two parts: the electricity price and the service price. According to policies issued by power companies, there are two types of electricity prices for EVs charging. For EVs charging at home or communities, the electricity price is consistent with the residential electricity price. For EVs using fast charging at centralized charging stations, electricity price is consistent with electricity price for industrial uses. Besides, time-of-use (TOU) electricity price is adapted to encourage EV users to charge during off-peak time periods. As for service price, generally, service price at a charging station equals to a basic value of service price multiplied by a coefficient . is a variable reflecting adequacy of charging resources. When charging resources are sufficient and there are less EVs charging, the value of is set smaller to attract more EV users, while charging resources are insufficient and there are large amount of EVs waiting for charging service, the value of is higher. In this way, in addition to a service cost, the service price at station i also functions as a signal guiding EVs to charge coordinately.
where is the TOU electricity price for charging stations, which is determined by policies and power companies. is the basic value of service price at charging station i, which is usually a fixed value reflecting operation cost of charging station. is a coefficient. and are the maximum and minimum service prices of charging station i respectively, which are set to avoid malignant competition between charging stations.
3.3. Electric Vehicle Model
To calculate energy cost, charging expense and time consumption, it is necessary to establish mathematical model to describe both the charging characteristics and moving characteristics of electric vehicles.
3.3.1. Charging Characteristics of EV
Charging characteristics of EVs refers to power demand and corresponding charging time. The power demand during whole charging process is usually presented by charging profile, which varies depending on battery type and charging mode. In this paper, we focus on the fast charging of lithium-ion battery in the EV, for which the generic charging profile can be treated as a piecewise linear profile (see Figure 2), and the first linear segment is usually between 0 and 0.8Qe, where Qe represents battery capacity [22]. Through fast charging a 16 kWh lithium-ion battery pack can achieve 80% of state of charge (SOC) in about half an hour [23].
In Figure 2, is the maximum SOC in the k-th linear segment. With piecewise linear profile of SOC curve during fast charging, charging rates during fast charging can also be approximately treated as a constant in each segment.
To simplify, suppose the energy consumption per kilometer qkm is a constant. Given an expected remaining mileage range at destination, considering the energy consumption from charging station to destination, the expected SOC level after charging can be calculated as:
where SOCd is the SOC when the EV gets to the destination, and SOCe is the expected SOC level when leaving the charging station. Drd is the expected remaining mileage range when arriving at destination. Dd is the driving distance from charging station to the destination.
With information of SOC at initial position and driving distance from initial position to charging station, the SOC level when getting to the charging station is:
where is the SOC at initial position, obtained from EV battery energy management system. SOCa is the SOC when getting to the charging station. Da is the driving distance from initial position to selected charging station.
Corresponding charging time depends on both SOCa and SOCe. Reasonable assumptions can be made that SOCa is in the first linear segment. As for SOCe, if SOCe is also in the first linear segment, charging time can be calculated as:
And if SOCe is also in the second linear segment, charging time can be calculated as:
If SOCe is in the k* linear segment and k* ≥ 3, charging time can be calculated as:
where tc is the charging time. Pc.k is the charging rate in the k-th linear segment and is the charging efficiency of battery pack.
3.3.2. Moving Characteristics of EV
Moving characteristics of the EV is closely related with topology structure of transportation network as well as traffic conditions. To describe EV’s moving performance, mathematical models of remaining mileage, average driving speed and driving time are formulated.
The remaining mileage Dr at the moment when charging request is proposed is determined by SOC at initial position and allowable minimum SOC of EV battery jointly, and all possible charging stations should be within remaining mileage range of the EV. While for an on-the-move EV, remaining mileage is dynamic and influenced by external factors too, such as traffic conditions, temperatures and so on. In this paper, to simplify the model, here, only SOC at initial position and allowable minimum SOC of EV battery are considered.
where SOCp and SOCmin are respectively SOC of the EV battery at initial position and minimal SOC.
The driving speed of the EV on each road segment is influenced by traffic conditions, including traffic volume and maximum speed limit. Average speed of the EV driving through road segment (p,q) at time t can be calculated as [24]:
where vpq(t) is the average speed on road segment (p,q) at time t, and is the maximum speed limit on road segment (p,q). Cpq(t − 1) and are traffic volume at time t − 1 and maximum traffic volume on road segment (p,q). Both Cpq(t − 1) and are provided to reserving charging strategy system by vehicle navigation system.
Therefore, time spending on driving through road segment (p,q) is:
In addition to time consumption driving through road segments, ideally, time delay at intersections also exerts an impact on total time consumption. Here in this paper, intersection time delay is not counted in since it is rather small compared with driving time on road segments.
4. Information Interactive Mechanism and Credit Mechanism
4.1. Information Interactive Mechanism Involving Vehicle Navigation, Charging Stations and EV
To achieve a reserving charging strategy and route selection with minimal cost or time consumption, information of traffic conditions, charging stations and the EV should be taken into consideration simultaneously. The information interactive mechanism between the EV battery energy management system, charging station and vehicle navigation plays a significant role in information transmitting, including both data input and data output of each part (see Figure 3).
4.1.1. EV Battery Energy Management System
Battery energy management system of electric vehicles plays an indispensable part in ensuring continuous power supply and promoting overall performance of battery [25]. Normally, a battery energy management has three functional modules: charging and discharging management module, balance management module and battery condition monitoring module. The vehicle battery energy management system is able to provide information of energy consumption per kilometer, charging efficiency, remaining SOC of battery and remaining mileage range.
4.1.2. Operation Management System of Charging Station
Operation management system of charging station is in charge of internal information aggregation, including real-time charging prices, usage and reservation conditions of charging piles, and information interaction with the external system such as reserving charging strategy system. Via providing data analysis and technique support for charging station construction and operation management, it contributes to optimal allocation of charging resources, as well as improving utilization of existing charging resources and revenue of charging station. Whenever it receives information acquisition request from reserving charging strategy system, it offers information of charging prices, usage and reservation conditions of charging piles and position of the charging station.
4.1.3. Vehicle Navigation System
Vehicle navigation system is an integration of global position technology (GPS), communication facility and database technique and so on [2]. Whenever accessed by reserving charging strategy system, it provides information of topology of transportation network, length of road segments, speed limit, traffic volume, current position and position of destination.
4.1.4. Information Interactive Mechanism
When reserving charging service is needed, the EV user opens the reserving charging system, and input control parameters: destination and expected remaining mileage at destination.
When charging request is proposed from an EV user, the reserving charging strategy system will obtain information of the EV battery through vehicle battery energy management system. Meanwhile, it asks for newest information of traffic conditions from vehicle navigation system and information of charging stations from every operation management system of charging station.
Via information gathering and processing, reserving charging system formulates reserving charging strategies and corresponding route plans. Then the EV user chooses a reserving charging strategy according to his/her preference for time consumption and charging expenses and submits charging reservation and waits for reservation confirmation.
When charging station operation management system receives the reserving charging requirement, it confirms the reservation, including the starting and finishing time of charging process and targeted charging pile, and decides whether to accept the reservation or not. After it accepts the reservation, no more reservations from other EVs for this charging pile should be accepted during the occupied charging time.
Reliable and instant information communication between reserving charging system, vehicle navigation system, operation management system of charging stations and the EV battery management system is the foundation of efficient and accurate performance of reserving charging system. In this paper, we make the assumptions that:
- (1)
- The information interaction between every involved part is reliable and safe.
- (2)
- Time delay during the process of information transmission and information processing is small enough and can be ignored.
4.2. Credit Mechanism
For electric vehicles, behaviors such as canceling the charging reservation will bring about financial loss to charging stations. Such behaviors can be seen as default behaviors owing to the fact that once the EV submits its reservation and charging station accepts it, the reservation is a kind of contract. Considering the default behaviors of electric vehicles, to hedge the default behaviors and regulate EVs’ reserving charging, a rolling record credit mechanism is adapted to ensure the fairness and rationality of the reserving charging platform. Under this mechanism, default behaviors will result in a lower credit level of the EV. Then, when charging station receives the reservation request, it has right to give priority to the EV which has a better credit record, and also charging stations are allowed to ask for extra fines from EVs with default behavior records.
Rolling credit record reflects the behavior of the EV in last R records. Suppose there is Rd out of R records where default behaviors occur, then the extra charges requested by charging station i can be formulated as:
where a is the base of the exponential function, Rd is the index of the exponential function. Formulated as an exponential function with number of default behaviors as index, the extra charges mathematical model is able to reflect that, in the latest R records, the more default records are, the greater the punishment is. fi(t) is a coefficient determined by charging stations. For charging station i, the value of fi(t) is greater during charging peak time periods and lower during charging valley time periods.
With the rolling records credit mechanism, reserving charging of electric vehicles is regulated, and since only last R records are taken into consideration, the EV with default records can recover its credit level in reserving charging system gradually by decreasing default behaviors.
5. Reserving Charging Decision-Making Model
5.1. Objective Functions
When EV users make reserving charging decisions and route plan, two main factors will be taken into account: time consumption and charging expense. Time consumption and charging expenses can be obtained based on selected route, selected charging station, as well as information of EV battery. In this paper, we establish an optimization model with two objective functions, so that EV users could choose their preferred reserving charging strategy and route plan among results set formulated with various weights for the two optimizations. Route plan consists of two stages, firstly possible route from initial position of EV to selected charging station, and then route from selected charging station to the destination.
5.1.1. Objective of Minimizing Driving Time
For EV users who care more about total time consumption from initial position to destination, they want to get to their destinations as soon as possible. Therefore, the objective function is established with minimizing time consumption.
where ta is the driving time from initial position to charging station and tw is the waiting time before getting charged at charging station. t2 denotes driving time from charging station to destination.
5.1.2. Objective of Minimizing Charging Expenses
For EV users who care more about charging expenses, they want to get to their destinations with minimum cost, including both charging expense and extra charges for historic default behavior records. Since energy consumption per kilometer is proportional to driving distance, minimal charging expense also means minimal driving distance to get the same remaining mileage range at destination. The objective function of minimizing charging expense is:
where tcs and tce are respectively the starting time and finishing time of charging process. is the time interval. Ccha means charging expense.
Considering the fact that traffic volume and maximum speed limit on each road segment are different, selected route which takes minimal time may not be the same as route, which requires shortest driving distances. Hence, the established optimization model, with minimal driving time and minimal charging expense, can comprehensively reflect the two top factors EV users concern most when making reserving charging strategy.
5.2. Constraint Conditions
(1) Constraint of EV remaining mileage
Due to the limit of remaining energy level of EV battery, the driving distance from initial position to selected charging station should be within its remaining mileage range.
(2) Constraint of available charging resources
Constraint of available charging piles means that, when the EV gets to the charging station, there are available charging piles to provide charging services during the whole charging process.
(3) Constraint of topology of traffic network
Available route selections of the EV are limited according to the topology of transportation network, as presented in (1)–(3). The one-way street characteristic also adds to constraint of route selection.
(4) Constraint of driving speed
Driving speed of the EV should not exceed the maximum and minimum driving speed limit on each road segment.
where and denote is the maximum and minimum driving speed limit on road segment (p,q) separately.
6. Solution Procedure
6.1. Weighted Directed Graph Based K Shortest Paths Algorithm
Dijkstra algorithm is used to identify the shortest path from a given node to other nodes [25]. However, despite the effectiveness of Dijkstra algorithm, it cannot guarantee overall optimization of total charging expenses or time consumption from initial position to destination, considering time-varying charging prices and different needed charging power at different stations. To solve this problem, K shortest paths algorithm is used in this paper, which can also be applied to directed or non-directed graphs with non-negative weights. With K shortest paths algorithm, for two given nodes, we can get several possible routes and then choose the preferred one among them after calculating total time consumption and charging expenses of each route. Suppose the transportation network is a weighted directed graph, and initial positions, all the road junctions and position of charging stations are located in the graph vertex.
Using weighted directed graph, to solve the reserving charging decision-making model with the objective of minimizing driving time, the weight of each graph edge is set as driving time on corresponding road segment, as presented in (14), that is, weight of edge (p,q) is tpq. To solve the reserving charging decision-making model with objective of minimizing charging expense, the weight of each graph edge In the weighted directed graph is set as driving distance on corresponding road segment, that is, weight of edge (p,q) is lpq.
6.2. Solving Procedure
The proposed two-objective optimization model can be solved separately. With combined information from charging stations and navigation system, possible route selections can be obtained, and driving distance of each road segment and corresponding time it takes to pass through the road segment can be calculated. The process of finding reserving charging strategies and route plans set consist of three main parts (see Figure 4): route plan from initial position to every charging station, route plan from every charging station to destination, and total time consumption and expenses calculation.
The specific steps are as follows:
- (1)
- When charging request is proposed, the reserving charging system obtains information of the EV (including position, destination, remaining SOC and expected SOC when arriving at destination), information of traffic conditions (including topology, traffic volume and maximum speed limit), and information of charging resources (including positions of charging stations, available charging piles and charging prices).
- (2)
- For charging station i, the reserving charging system searches for K shortest routes from initial position to the charging station using K shortest paths algorithm and calculates the driving distances. If station i is out of remaining mileage range of the EV, it is out of option.
- (3)
- Reserving charging system calculates driving distances, driving time and energy consumptions of K routes from i-th charging station to destination based on K shortest paths algorithm.
- (4)
- Reserving charging system calculates needed charging power, charging time and waiting time at i-th charging station. If waiting time at station i is longer than a given value, i-th charging station is out of option.
- (5)
- Reserving charging system calculates charging fees C and total time consumption T for choosing charging station i and corresponding routes.
- (6)
- Reserving charging system respectively obtains results with minimal time consumption and minimal charging expense among all possible routes obtained through K shortest paths algorithm.
- (7)
- The EV user chooses reserving charging strategy and route according to his/her preference for time consumption and expenses, and submits the reservation, including starting time and finishing time of charging.
- (8)
- Charging stations check reservation information. If reservation request is not accepted by selected charging station, the EV user has to turn to the suboptimal charging station, until charging reservation is accepted by a certain charging station.
7. Case Studies
7.1. Data Information
Take a real transportation network map in China as an example. In this map, only arterial roads are considered, and each transportation intersection is numbered (see Figure 5). The specific information of roads is presented in detail in Appendix A. The initial position of the EV is 1 km from node 45, and the destination is in node 11. Road segments (27, 28), (30, 31), (14, 21) and (41, 43) are one-way roads. Suppose there are 6 charging stations in this area, and these 4 charging stations have different numbers of charging piles (see Table 1).
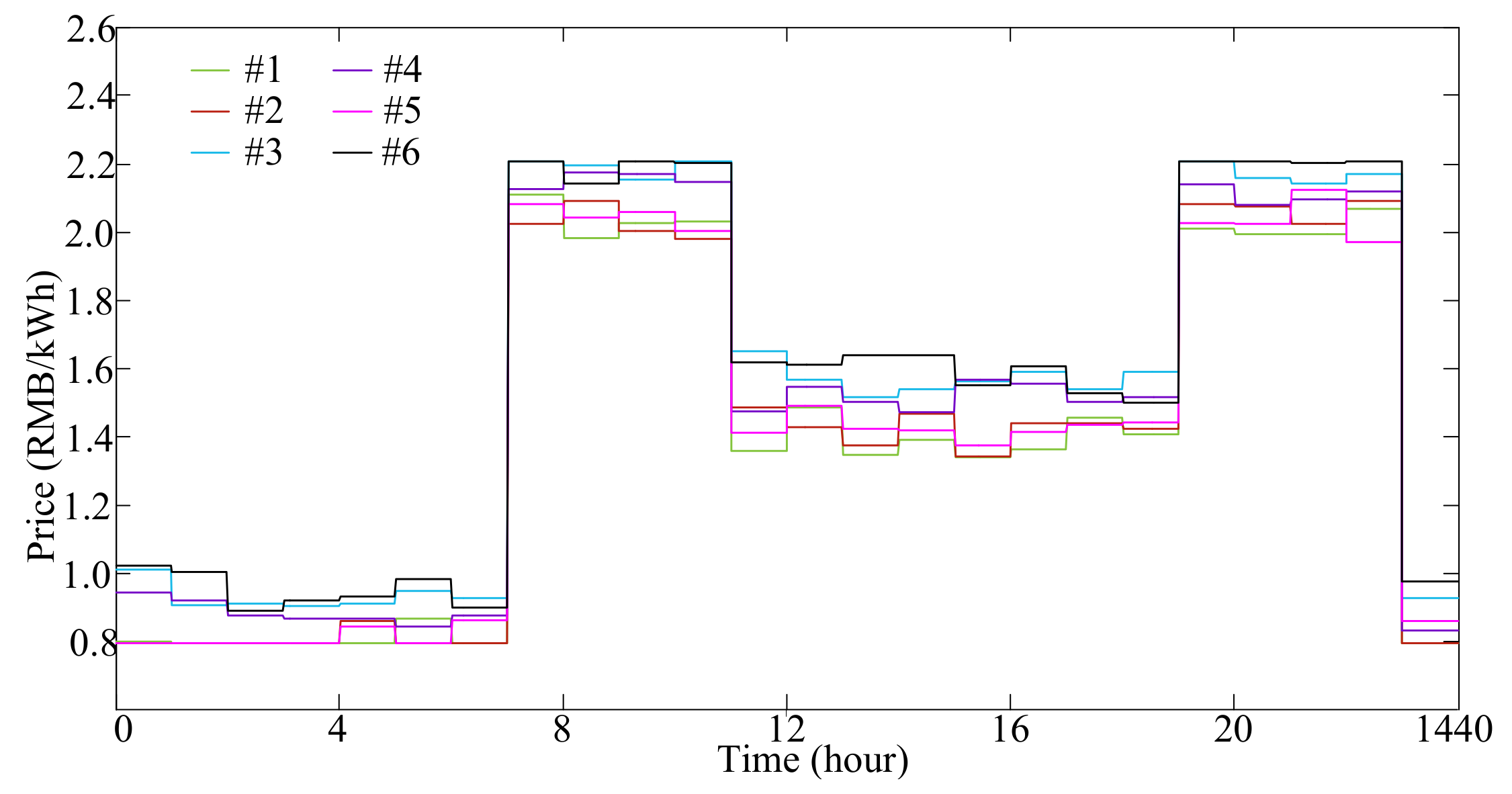
As for charging prices, TOU electricity price is used at these four charging stations. According to Electricity Power Company, TOU charging prices during different periods are 0.3946 RMB/kWh in valley period, 0.6950 RMB/kWh in plain period, and 1.0044 RMB/kWh in peak period, and basic service price is 0.8 RMB/kWh. To reflect difference in service prices during different periods at charging stations, a real-time charging price coefficient is adapted. The maximum service prices and minimum service prices are 1.2 RMB/kWh and 0.4 RMB/kWh, respectively. Therefore, total prices at different charging stations, including electricity price and service price at charging stations varies a lot (see Figure 6).
Take Peugeot iOn as an example. This EV has a consumption rate of 0.125 kWh/km and a battery capacity of 16 kWh [22]. The charging rate of rapid charge provided by charging piles is Pc = 22 kW, and we set the charging efficiency as 95%. Mileage range of this EV in a full charge is 93 miles [23], which is about 150 km. The expected remaining mileage at destination is Drd = 105 km. The remaining mileage range of EV at initial position is Dr = 25 km. The EV user submits reserving charging request to reserving charging system at 2:00 p.m. In terms of extra charges, assume there are 3 default behavior records of this EV and the base index of exponential function is set 2.
7.2. Reserving Charging Strategy and Route Selection With Minimal Time Consumption
When reserving charging system receives reserving charging request, it gains information of traffic conditions, and on this basis, it calculates driving distance with shortest time consumption, including driving time from the EV’s initial position to every charging stations, driving time from charging stations to destination, and charging time at different stations. To achieve minimal time consumption, 3 routes from initial position to each charging station and 3 routes from each charging station to the destination are searched for using K shortest paths algorithm. Based on calculation results, with the goal of minimizing time consumption, driving distances of routes with minimal time consumption from initial position to station #1, #2, #3, #4, #5 and #6 are 29 km, 14.7 km, 22.6 km, 6.5 km, 12.3 km and 17.0 km. The driving distance from initial position to charging station #1 exceeds remaining mileage range of the EV, hence station #1 out of option. To achieve expected remaining mileage range at destination, with any routes passing through station #4, SOC of the EV battery when finishing charging has to achieve the value of 1.0086, which is impossible, hence station #4 is out of option. Corresponding driving time to charging station #2, #3, #5 and #6 are respectively 23.08 min, 30.26 min, 15.61 min and 26.53 min.
Meanwhile, with the objective of minimizing time consumption, driving distance from station #2, #3, #5 and #6 to destination are respectively 15.6 km, 20.1 km, 14.3 km and 17 km, with driving time of 15.53 min, 14.14 min, 24.71 min and 14.34 min. Based on driving distances from initial position to charging station and from charging station to destination, charging time at different candidate stations can be calculated, which are 40.25 min, 42.45 min, 45.08 min and 39.75 min.
Reserving charging system calculates waiting time at every charging station according to reservations and charging time. From the moment of charging request is proposed, waiting time at station #2, #3, #5 and #6 are 24 min, 31 min, 16 min and 27 min.
On this basis, the route selection with minimal time consumption can be obtained (see Figure 7) and corresponding time consumption and total expense (see Figure 8).
With routes passing by station #2, #3, #5 and #6, total time consumption is 79.78 min, 87.59 min, 85.79 min and 81.09 min. Charging expenses at station #2, #3, #5 and #6 are 20.31 RMB, 22.85 RMB, 20.84 RMB and 22.83 RMB. Extra charges are respectively 1.56 RMB, 1.81 RMB, 1.26 RMB and 1.78 RMB. Total expenses at station #2, #3, #5 and #6 are 21.87 RMB, 24.66 RMB, 22.10 RMB and 24.61 RMB.
Among three candidate charging stations, station #2 has minimal time consumption. For charging station #3, time consumption is the highest among all these 4 routes. In this case, station #2 and #6 shares similar routes, and these two options has similar time consumption but with quite different charging expenses. Reasons for this phenomenon lay with the fact that during charging time (about 2:30 p.m. to 3:10 p.m.) charging prices at station #2 are lower than that at station #6. Therefore, for the EV user who prefers reserving charging strategy with minimal time consumption, charging station 2 with minimal driving time route is the optimum choice.
7.3. Reserving Charging Strategy and Route Selection with Minimal Expense
With the expectation of minimum expense, driving distances of optimal routes from initial position of the EV to charging stations, in turn, are 27.4 km, 14.7 km, 22.6 km, and 6.5 km. The driving distance from initial position to charging station #1 exceeds remaining mileage range of the EV, hence station #1 out of option. Corresponding driving time to charging station #2, #3, #4, #5 and #6 are 23.08 min, 30.46 min, 8.85 min 15.81 min and 26.53 min.
Similarly, with the objective of minimizing expense, driving distance from station #2, #3, #4, #5 and #6 to destination are respectively 15.4 km, 15.0 km, 27.5 km, 22.1 km and 13.1 km, with driving time of 19.75 min, 28.4 min, 33.11 min, 39.85 min and 16.3 min. Based on driving distances from initial position to charging station and from charging station to destination, charging time at different candidate stations can be calculated, which are 39.46 min, 42.10 min, 47.34 min, 42.32 min and 39.16 min.
Considering charging time, from the moment of charging request is proposed, waiting time at different stations are 24 min, 31 min, 9 min, 16 min and 27 min respectively.
The final route selection with minimal expense can be obtained (see Figure 9), and corresponding time consumption and expense (see Figure 10).
With routes passing by station #2, #3, #4, #5 and #6, total time consumption is 82.29 min, 100.96 min, 89.45 min, 97.98 min and 81.99 min. Charging expenses at station #2, #3, #4, #5 and #6 are 19.99 RMB, 22.85 RMB, 21.14 RMB, 20.42 RMB and 22.45 RMB. Extra charges are 1.56 RMB, 1.81 RMB, 3.24 RMB 1.26 RMB and 1.78 RMB. Total expenses at station #2, #3, #4, #5 and #6 are 21.55 RMB, 24.66 RMB, 24.37 RMB, 21.68 RMB and 24.23 RMB.
With minimal expense, among these three candidate charging stations, station #2 has minimal expense, with lower time consumption. For charging station 3, total expense choosing station 3 is the highest among all these 5 routes with minimal expense, and time consumption choosing station 3 is also relatively high. Besides, station #2 and #6, station #3 and #5 respectively share the same routes but with different time consumption and charging expenses, in addition to difference of charging prices, this is also possibly because that different locations of charging stations mean different begin and finish charging time, which also means different traffic volume while driving on the same roads at different time. All in all, for the EV user who prefers reserving charging strategy with minimal expense, charging station 2 with minimal charging expense route is the optimum choice.
7.4. Analysis of Optimal Results with Different Weights for Two Objectives
Final reserving charging strategy and route plan that EV user chooses varies according to his/her preference for time consumption and expense. Through normalization and weighting of these two single-objective function, the reserving charging decision-making model can be turned to a single-objective function, expressed as:
where and are weights of time consumption and expense, and . and are respectively average time consumption and expense among the 6 reserving strategies discussed in Section 7.2 and Section 7.3. Optimal reserving charging and route plan results with different weights for time consumption and expenses (see Figure 11).
Time consumption and expense between different choices with different time consumption weight ω1 are quite different (see Table 2). If weight of time consumption ω1 is less than 0.68 (case 1), optimal solution for objective F is charging station 2. While when ω1 is greater than 0.68 (case 2), the optimal solution is still charging station 2, but the driving route passing by #2 is different with the one in case 1, case 1 is with less charging expenses, and case 2 is with total time consumption.
8. Conclusions
In this paper, with combined information of traffic conditions, EV battery, prices, and reservation at charging stations taken into account simultaneously, charging power and charging time of EV are analyzed. Besides, considering default behaviors of EVs in reserving charging system, a rolling records credit mechanism is designed, using an exponential function to describe extra charges at charging stations for bad credit records of EVs. Based on models of traffic conditions, EV and charging stations, two single-objective reserving charging decision-making and route selection models are formulated to realize minimal time consumption and charging expense from initial position to destination passing by a charging station. Case study results demonstrate that the reserving charging decision-making models addressed in this paper can provide EV users with a reserving charging strategy and route plan sets with objectives of minimizing driving time or charging expenses, and EV users are able to choose ideal reserving charging strategies and route plans according to their preference for time-saving and money-saving. For further study, it would be interesting to extend the reserving charging decision-making and route plan to a dynamic one, with a more accurate moving performance of EV and SOC changing process of EV battery.
Author Contributions
H.L. conceived the idea and wrote the paper; W.Y. contributed to formulate the reserving charging decision-making model; X.Y. contributed to modeling of battery energy system; M.N. contributed to case study and data analysis.
Acknowledgments
This work is support by the “111” project of “Renewable Energy and Smart Grid” (B14022).
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
The length and average speed of each road in the transportation network.
| Road (p,q) | Road Length lpq (km) | Average Speed vpq (km/hour) | Road (p,q) | Road Length lpq (km) | Average Speed vpq (km/hour) | Road (p,q) | Road Length lpq (km) | Average Speed vpq (km/hour) |
|---|---|---|---|---|---|---|---|---|
| (1,2) | 3.5 | 40 | (18,11) | 4.7 | 60 | (35,26) | 5.4 | 70 |
| (1,5) | 6.8 | 60 | (18,19 | 2 | 60 | (35,34) | 3.4 | 50 |
| (1,10) | 10.5 | 60 | (18,26) | 2 | 60 | (35,36) | 2.2 | 40 |
| (2,1) | 3.5 | 40 | (19,12) | 4 | 40 | (35,39) | 2.9 | 50 |
| (2.3) | 3.3 | 40 | (19,18) | 2 | 60 | (36,27) | 4.4 | 40 |
| (2,6) | 5.4 | 60 | (19,20) | 2.8 | 60 | (36,35) | 2.2 | 40 |
| (3,2) | 3.3 | 40 | (19,27) | 2 | 50 | (36,40) | 2.3 | 40 |
| (3,4) | 5.8 | 50 | (20,13) | 4 | 50 | (37,28) | 5 | 40 |
| (3,7) | 5.4 | 50 | (20,19) | 2.8 | 70 | (37,38) | 5.1 | 40 |
| (4,3) | 5.8 | 50 | (20,21) | 5.5 | 50 | (37,40) | 2.1 | 60 |
| (4,8) | 8.5 | 40 | (20,28) | 2.2 | 40 | (38,29) | 7.4 | 40 |
| (4,25) | 15 | 40 | (21,20) | 5.5 | 70 | (38,37) | 5.1 | 40 |
| (5,1) | 6.8 | 60 | (21,22) | 3.2 | 60 | (38,41) | 2.1 | 50 |
| (5,6) | 2.6 | 40 | (22,16) | 3.1 | 40 | (39,35) | 2.9 | 70 |
| (5,11) | 5.4 | 70 | (22,21) | 3.2 | 70 | (39,40) | 2 | 60 |
| (6,2) | 5.4 | 60 | (22,23) | 2 | 60 | (39,43) | 7.7 | 30 |
| (6,5) | 2.6 | 60 | (22,29) | 4.3 | 40 | (39,47) | 4.1 | 60 |
| (6,7) | 3 | 50 | (23,16) | 4 | 40 | (40,36) | 2.3 | 40 |
| (7,3) | 5.4 | 50 | (23,22) | 2 | 60 | (40,37) | 2.1 | 60 |
| (7,6) | 3 | 70 | (23,24) | 2 | 60 | (40,39) | 2 | 60 |
| (7,8) | 2.5 | 50 | (23,30) | 4.7 | 40 | (40,41) | 6.3 | 50 |
| (7,14) | 3 | 40 | (24,9) | 8.7 | 60 | (41,38) | 2.1 | 50 |
| (8,4) | 8.5 | 40 | (24,23) | 2 | 60 | (41,40) | 6.3 | 50 |
| (8,7) | 2.5 | 70 | (24,25) | 6 | 50 | (41,42) | 4.8 | 60 |
| (8,9) | 1.2 | 40 | (24,31) | 4.6 | 50 | (41,43) * | 2.4 | 40 |
| (8,15) | 3 | 60 | (25,4) | 15 | 40 | (42,30) | 4.8 | 50 |
| (9,8) | 1.2 | 60 | (25,24) | 6 | 50 | (42,41) | 4.8 | 60 |
| (9,16) | 2.6 | 50 | (25,33) | 10.4 | 60 | (42,46) | 3 | 50 |
| (9,24) | 8.7 | 60 | (26,17) | 4.4 | 40 | (43,39) | 7.7 | 30 |
| (10,1) | 10.5 | 60 | (26,18) | 2 | 70 | (43,44) | 1.6 | 60 |
| (10,11) | 3.4 | 50 | (26,27) | 2.2 | 60 | (43,48) | 4.8 | 60 |
| (10,17) | 5.8 | 40 | (26,35) | 5.4 | 50 | (44,43) | 1.6 | 60 |
| (11,5) | 5.4 | 40 | (27,19) | 2 | 40 | (44,45) | 2.4 | 50 |
| (11,10) | 3.4 | 50 | (27,26) | 2.2 | 60 | (44,49) | 4.8 | 40 |
| (11,12) | 2.8 | 40 | (27,28) * | 2.1 | 40 | (45,44) | 2.4 | 50 |
| (11,18) | 4.7 | 60 | (27,36) | 4.4 | 40 | (45,46) | 3.5 | 40 |
| (12,11) | 2.8 | 30 | (28,20) | 2.2 | 40 | (45,50) | 5 | 50 |
| (12,13) | 2.2 | 30 | (28,37) | 5 | 40 | (46,32) | 5 | 40 |
| (12,19) | 4 | 40 | (29,22) | 4.3 | 40 | (46,42) | 3 | 50 |
| (13,12) | 2.2 | 30 | (29,30) | 1.7 | 60 | (46,45) | 3.5 | 40 |
| (13,14) | 5 | 30 | (29,38) | 7.4 | 40 | (46,51) | 3.3 | 40 |
| (13,20) | 4 | 50 | (30,23) | 4.7 | 40 | (47,34) | 4.5 | 40 |
| (14,7) | 3 | 40 | (30,29) | 1.7 | 60 | (47,39) | 4.1 | 60 |
| (14,13) | 5 | 30 | (30,31) * | 2.8 | 50 | (47,48) | 10.8 | 50 |
| (14,15) | 1.4 | 60 | (30,42) | 4.8 | 50 | (48,43) | 4.8 | 60 |
| (14,21) * | 3.3 | 40 | (31,24) | 4.6 | 50 | (48,47) | 10.8 | 50 |
| (15,8) | 3 | 60 | (31,32) | 1.8 | 40 | (48,49) | 1.8 | 40 |
| (15,14) | 1.4 | 30 | (32,31) | 1.8 | 40 | (49,44) | 4.8 | 40 |
| (15,16) | 2 | 40 | (32,33) | 5.5 | 50 | (49,48) | 1.8 | 40 |
| (16,9) | 2.6 | 50 | (32,46) | 5 | 40 | (49,50) | 2.7 | 60 |
| (16,15) | 2 | 30 | (33,25) | 10.4 | 60 | (50,45) | 5 | 50 |
| (16,22) | 3.1 | 40 | (33,32) | 5.5 | 50 | (50,49) | 2.7 | 60 |
| (16,23) | 4 | 40 | (33,51) | 7.7 | 40 | (50,51) | 7.2 | 40 |
| (17,10) | 5.8 | 40 | (34,17) | 8.8 | 50 | (51,33) | 7.7 | 40 |
| (17,26) | 4.4 | 40 | (34,35) | 3.4 | 50 | (51,46) | 3.3 | 40 |
| (17,34) | 8.8 | 50 | (34,47) | 4.5 | 40 | (51,50) | 7.2 | 40 |
Note: * present the one-way road.
References
- Schneider, K.; Gerkensmeyer, C.; Kintner-Meyer, M.; Fletcher, R. Impact assessment of plug-in hybrid vehicles on Pacific Northwest distribution systems. In Proceedings of the IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar]
- Yang, J.Y.; Chou, L.D.; Chang, Y.J. Electric-vehicle navigation system based on power consumption. IEEE Trans. Veh. Technol. 2016, 65, 5930–5943. [Google Scholar] [CrossRef]
- Hübner, M.; Zhao, L.; Mirbach, T.; Haubrich, H.J.; Moser, A. Impact of large-scale electric vehicle application on the power supply. In Proceedings of the 2009 IEEE Electrical Power & Energy Conference (EPEC), Piscataway, NJ, USA, 22–23 October 2009. [Google Scholar]
- Green, R.C.; Wang, L.; Alam, M. The impact of plug-in hybrid electric vehicles on distribution networks: A review and outlook. IEEE PES Gen. Meet. Minneap. 2010. [Google Scholar] [CrossRef]
- Munshi, A.A.; Mohamed, A.R.I. Extracting and defining flexibility of residential electrical vehicle charging loads. IEEE Trans. Ind. Inform. 2018, 14, 448–461. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P. An aggregate model of plug-in electric vehicles for primary frequency control. In Proceedings of the IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016. [Google Scholar]
- Shao, C.; Wang, X.; Wang, X.; Du, C.; Dang, C.; Liu, S. cooperative dispatch of wind generation and electric vehicles with battery storage capacity constraints in SCUC. IEEE Trans. Smart Grid 2014, 5, 2219–2226. [Google Scholar] [CrossRef]
- Sortomme, E.; Hindi, M.M.; MacPherson, S.D.J.; Venkata, S.S. Coordinated charging of plug-in hybrid electric vehicles to minimize distribution system losses. IEEE Trans. Smart Grid 2011, 2, 198–205. [Google Scholar] [CrossRef]
- Qi, W.; Xu, Z.; Shen, Z.J.M.; Hu, Z.; Song, Y. Hierarchical coordinated control of plug-in electric vehicles charging in multifamily dwellings. IEEE Trans. Smart Grid 2014, 5, 1465–1474. [Google Scholar] [CrossRef]
- Chen, J.J.; Yang, J.; Li, M.; Zhou, Q.M.; Jiang, B. An optimal charging strategy for electrical vehicles based on the electricity price with temporal and spatial characteristics. In Proceedings of the IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016. [Google Scholar]
- Guo, Q.; Wang, Y.; Sun, H.; Li, Z.; Zhang, B. Research on architecture of ITS based smart charging guide system. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011. [Google Scholar]
- Jurik, T.; Cela, A.; Hamouche, R.; Natowicz, R.; Reama, A.; Niculescu, S.; Julien, J. Energy optimal real-time navigation system. IEEE Intell. Transp. Syst. Mag. 2014, 6, 66–79. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, J.; Mu, T. Context-aware and energy-driven route optimization for fully electric vehicles via crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1331–1345. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Kiyama, N.; Aoshima, H.; Kashiyama, M. A route search method for electric vehicles in consideration of range and locations of charging stations. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011. [Google Scholar]
- Fan, H.; Hou, H.; Ke, X.; Zhu, G.; Chen, W. The optimal charging strategy of EV rational user based on TOU power price. In Proceedings of the International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), Wuhan, China, 3–4 December 2016. [Google Scholar]
- Rezgui, J.; Cherkaoui, S.; Said, D. A two-way communication scheme for vehicles charging control in the smart grid. In Proceedings of the 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Limassol, Cyprus, 27–31 August 2012. [Google Scholar]
- Sweda, T.M.; Klabjan, D. Finding minimum-cost paths for electric vehicles. In Proceedings of the IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012. [Google Scholar]
- Xiang, Q.; Kong, L.; Liu, X.; Xu, J.; Wang, W. Auc2Reserve: A differentially private auction for electric vehicle fast charging reservation (invited paper). In Proceedings of the IEEE 22nd International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Daegu, Korea, 17–19 August 2016. [Google Scholar]
- Conway, T. On the effects of a routing and reservation system on the electric vehicle public charging network. IEEE Trans. Intell. Transp. Syst. 2016. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, N.; Kim, Y.J.; Chang, G. A reservation based charging management for on-the-move EV under mobility uncertainty. In Proceedings of the 2015 IEEE Online Conference on Green Communications (OnlineGreenComm), Piscataway, NJ, USA, 10–12 November 2015. [Google Scholar]
- Montoya, A.; Guéret, C.; Mendoza, J.; Villegas, J. The electric vehicle routing problem with nonlinear charging function. Transp. Res. Part B 2017. [Google Scholar] [CrossRef]
- Peugeot.co.uk. Peugeot ION|Technical Data—Peugeot UK. 2017. Available online: http://www.peugeot.co.uk/showroom/ion/5-door/technical-information/ (accessed on 27 July 2017).
- Liu, H.; Niu, M.; Wang, W. Reserving charging strategy for electric vehicles based on combined model of road-charging station-electric vehicle. In Proceedings of the IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016. [Google Scholar]
- Gnana Swathika, O.V.; Hemamalini, S. Prims-aided dijkstra algorithm for adaptive protection in microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1279–1286. [Google Scholar] [CrossRef]
Figure 1.
Diagram of available charging piles and waiting time.

Figure 2.
Piecewise linear profile of electrical vehicle (EV) battery fast charging: (a) Piecewise linear profile of EV SOC; (b) Piecewise linear profile of EV charging rate.
Figure 2.
Piecewise linear profile of electrical vehicle (EV) battery fast charging: (a) Piecewise linear profile of EV SOC; (b) Piecewise linear profile of EV charging rate.

Figure 3.
Information interaction mechanism between vehicle navigation, charging station and EV.

Figure 4.
Solving procedure of reserving charging decision-making process.

Figure 5.
A transportation network map.

Figure 6.
Charging prices at six charging stations.

Figure 7.
Route selection results with the objective of minimizing time consumption.

Figure 8.
Time consumption and expenses of different reserving charging strategy with the objective of minimizing time consumption.
Figure 8.
Time consumption and expenses of different reserving charging strategy with the objective of minimizing time consumption.

Figure 9.
Route selection results with the objective of minimizing charging expense.

Figure 10.
Time consumption and charging expenses of different reserving charging strategy with the objective of minimizing charging expense.
Figure 10.
Time consumption and charging expenses of different reserving charging strategy with the objective of minimizing charging expense.

Figure 11.
Decision results with different weights for time consumption.

Table 1.
Position and number of charging piles of charging stations.
| Charging Station | Nearest Node | Distance from Node (km) | Number of Piles |
|---|---|---|---|
| #1 | 12 | 0 | 4 |
| #2 | 40 | 0 | 4 |
| #3 | 9 | 1 | 5 |
| #4 | 46 | 1 | 6 |
| #5 | 30 | 0 | 4 |
| #6 | 36 | 0 | 4 |
Table 2.
Time consumption and expenses of different choices with different weights for time consumption.
Table 2.
Time consumption and expenses of different choices with different weights for time consumption.
| Weight for Time Consumption | Preferred Charging Station | Time Consumption (min) | Total Expense (RMB) |
|---|---|---|---|
| Case 1: ω1 ≤ 0.68 | #2 | 87.6 | 17.9 |
| Case 2: ω1 > 0.68 | #2 | 70.6 | 22.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, H.; Yin, W.; Yuan, X.; Niu, M. Reserving Charging Decision-Making Model and Route Plan for Electric Vehicles Considering Information of Traffic and Charging Station. Sustainability 2018, 10, 1324. https://doi.org/10.3390/su10051324
AMA Style
Liu H, Yin W, Yuan X, Niu M. Reserving Charging Decision-Making Model and Route Plan for Electric Vehicles Considering Information of Traffic and Charging Station. Sustainability. 2018; 10(5):1324. https://doi.org/10.3390/su10051324
Chicago/Turabian StyleLiu, Haoming, Wenqian Yin, Xiaoling Yuan, and Man Niu. 2018. "Reserving Charging Decision-Making Model and Route Plan for Electric Vehicles Considering Information of Traffic and Charging Station" Sustainability 10, no. 5: 1324. https://doi.org/10.3390/su10051324
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.