Automatic Mapping of Forest Stands Based on Three-Dimensional Point Clouds Derived from Terrestrial Laser-Scanning



Abstract
:1. Introduction
2. Data and Methods
2.1. Experimental Stand
2.2. Data Collection
2.3. Coordinate Transformation
2.4. Point Cloud Processing
2.5. Two-Step Clustering for the Detection of Tree Positions
2.5.1. Stage-One Clustering
2.5.2. Stage-Two Clustering
2.6. Assignment of Tree Locations
2.7. Measurement of DBH
- Remove all DBH estimates larger than 80 cm (DBHx > 80 cm UDx + tc > 80 cm). Rationale: according to a priori knowledge, trees with larger DBH do not exist in the test stand.
- Remove UD estimates larger than the corresponding DBH-estimate (UDx > DBHx). Rationale: Diameter increasing with increasing height is illogical.
- Remove all DBHx, having values larger than the corresponding UDx value plus twice the taper form correction constant (DBHx > UDx + 2 tc). Rationale: A taper of more than 2.62 cm m−1 is highly unlikely.
- Given that three or more DBH-estimates, and three or more UD-estimates remain for a specific tree after steps 1–3: Remove all DBH-estimates for that tree if their standard deviation is larger than the standard deviation of the corresponding UD-estimates. Rationale: According to a visual inspection of the fitted circles and ellipses, a high variation between the fits indicates much noise near the stem, resulting in poor fits.
- Neglect DBH4 and DBH5 as well as UD4 and UD5 (diameters measured by ellipse fitting) if the semi-minor axis is smaller than 80% of the semi-major axis. Rationale: According to visual inspection of the fitted ellipses, strong flattening indicates much noise near the stem, resulting in poor fits.
- Select the first available measure from the sequence DBH4, DBH5, DBH1, DBH2, DBH3, UD4, UD5, UD1, UD2, UD3 after application of steps 1 until 5. Rationale: Diameter measurement in 1.3 m height is favored over measurement in 3.3 m height, as no assumptions regarding tc must be made, and diameter estimation via ellipse-fits is favored over estimates from circle-fits, as ellipses may fit circular and elliptical stem cross-sections as well.
- Apply the taper form correction constant of 2.62 cm m−1 if an UD estimate is finally selected.
3. Results
3.1. Two-Step Clustering for the Detection of Tree Positions
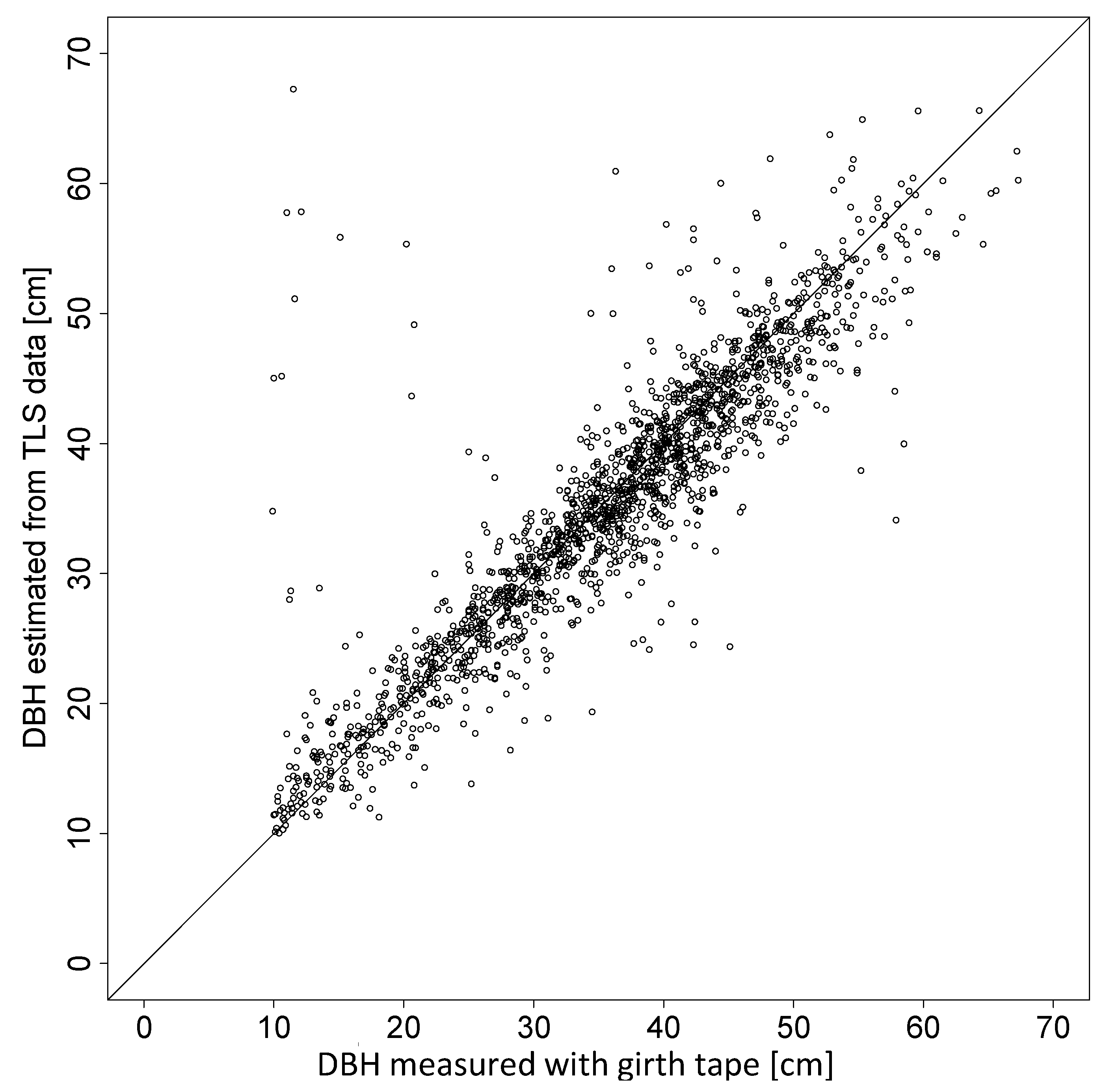
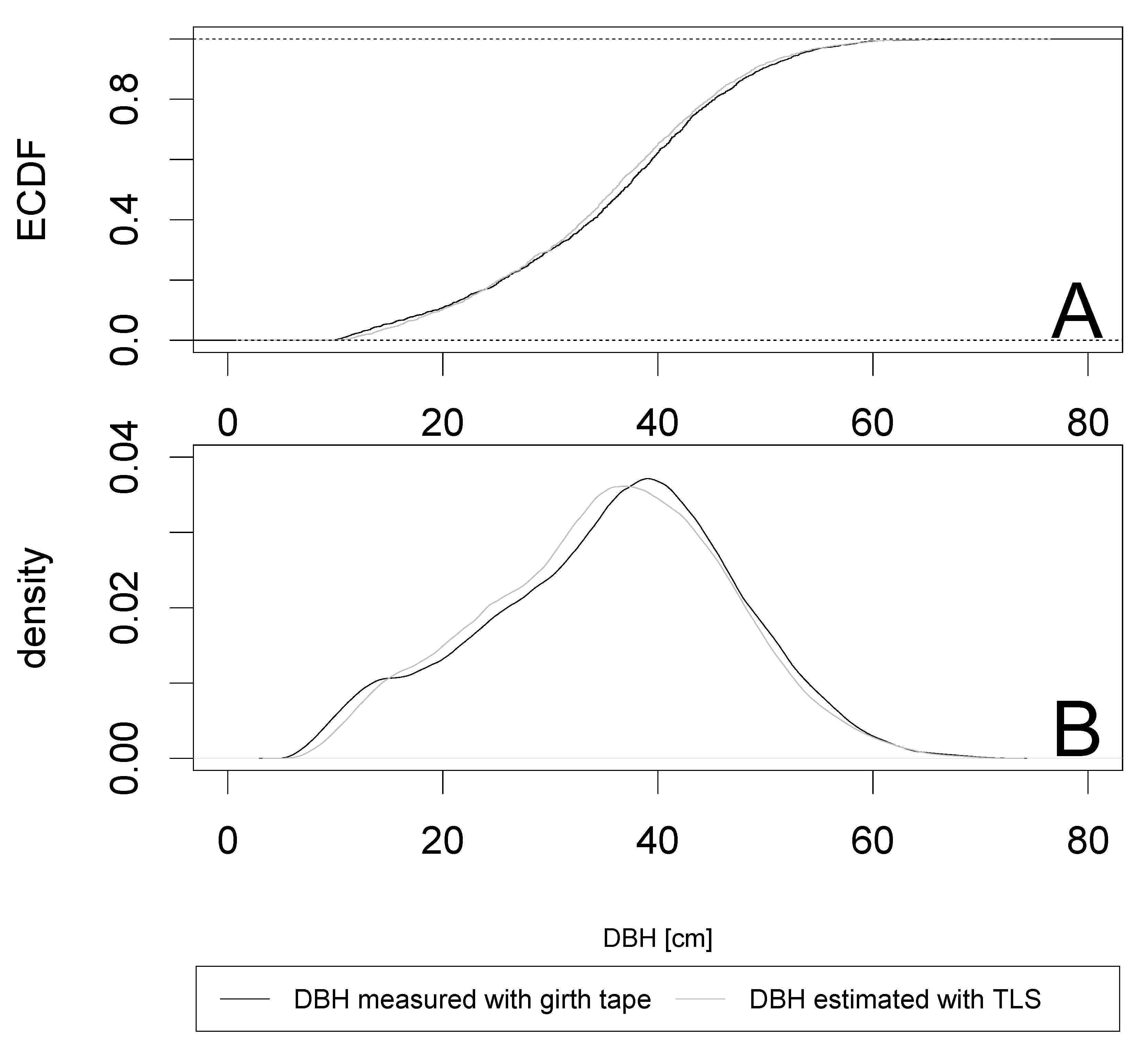
3.2. Assignment of Tree Locations and DBH Estimation
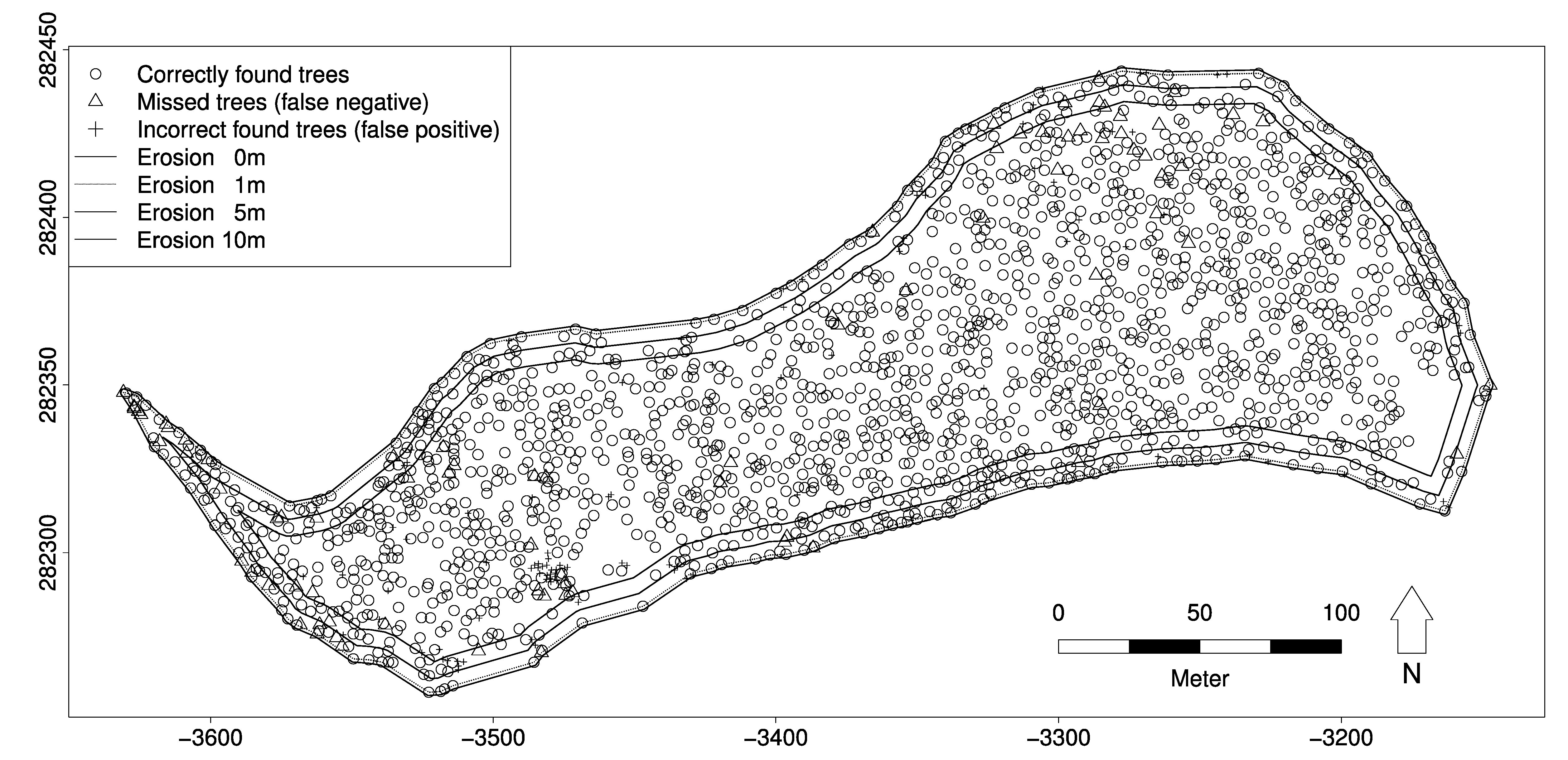
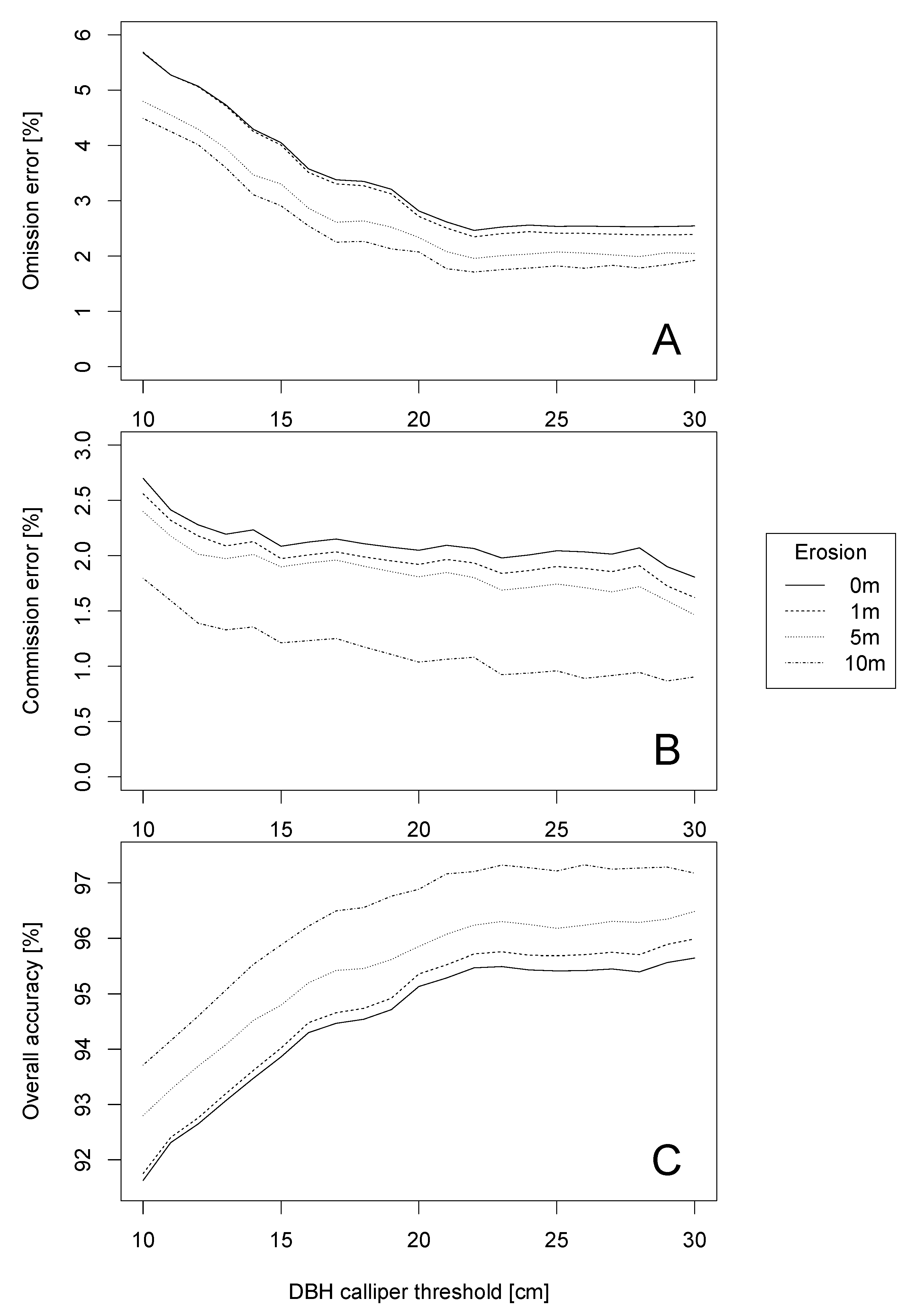
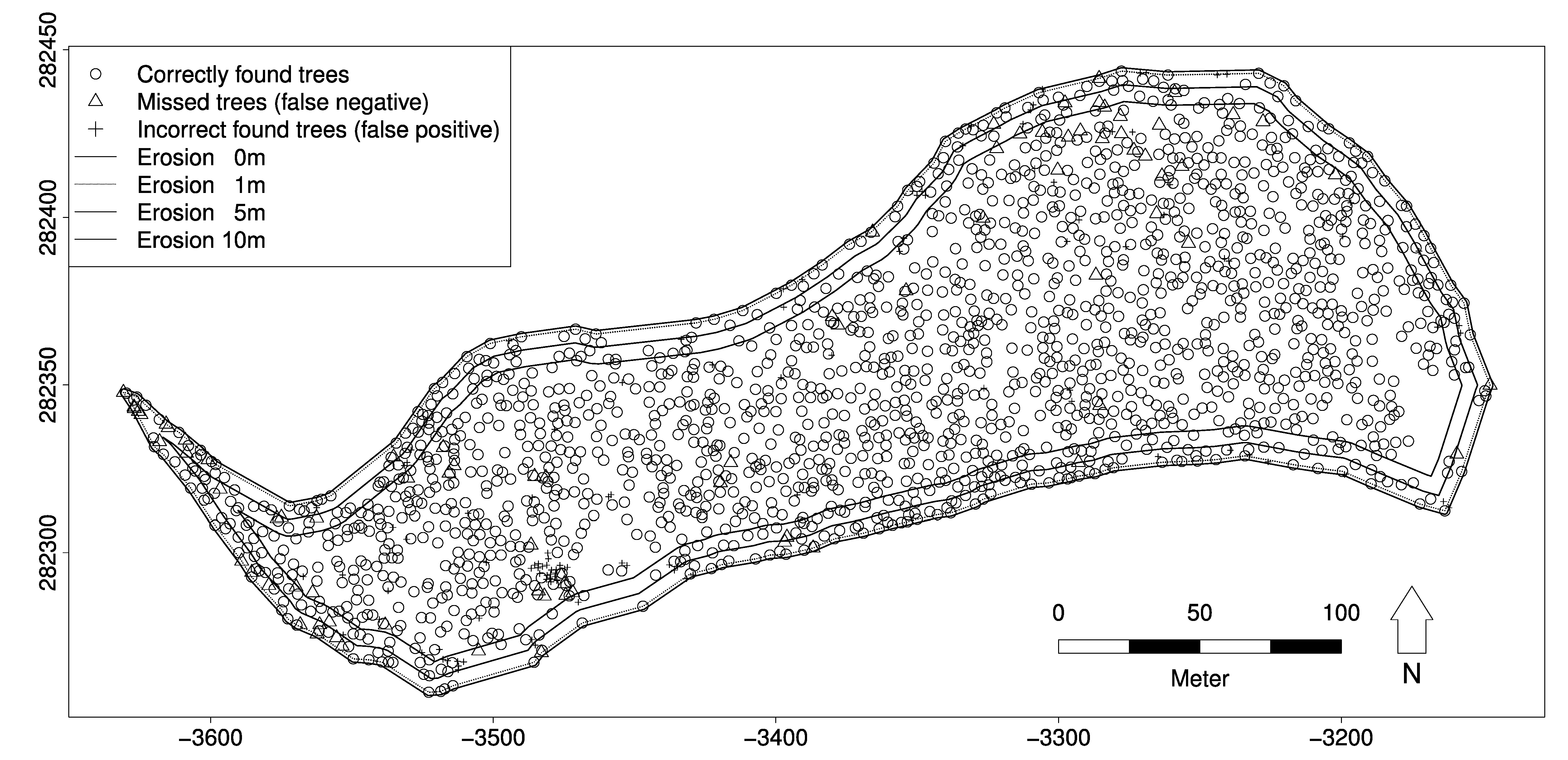
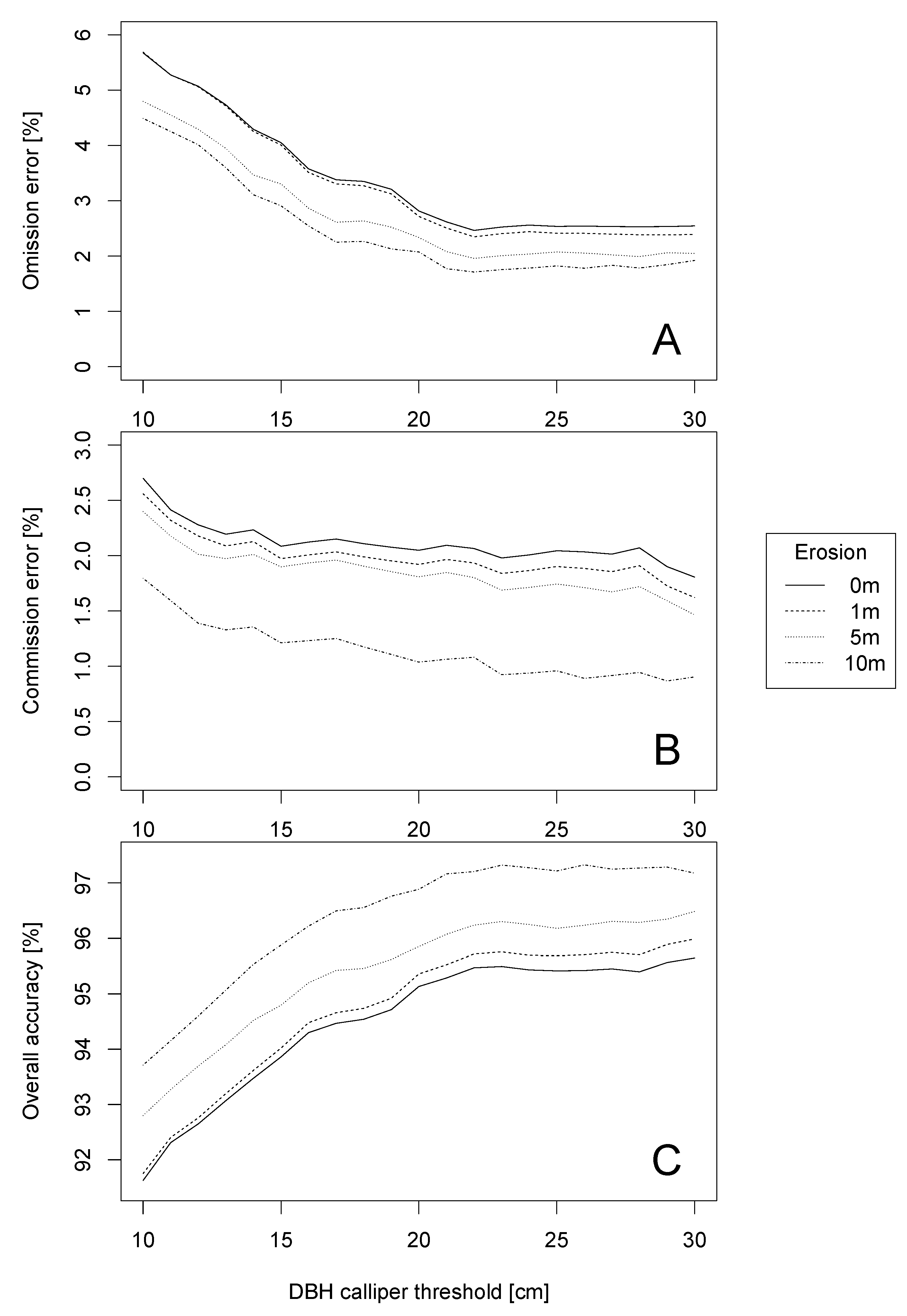
3.3. Stand Mapping and Erosion
4. Discussion
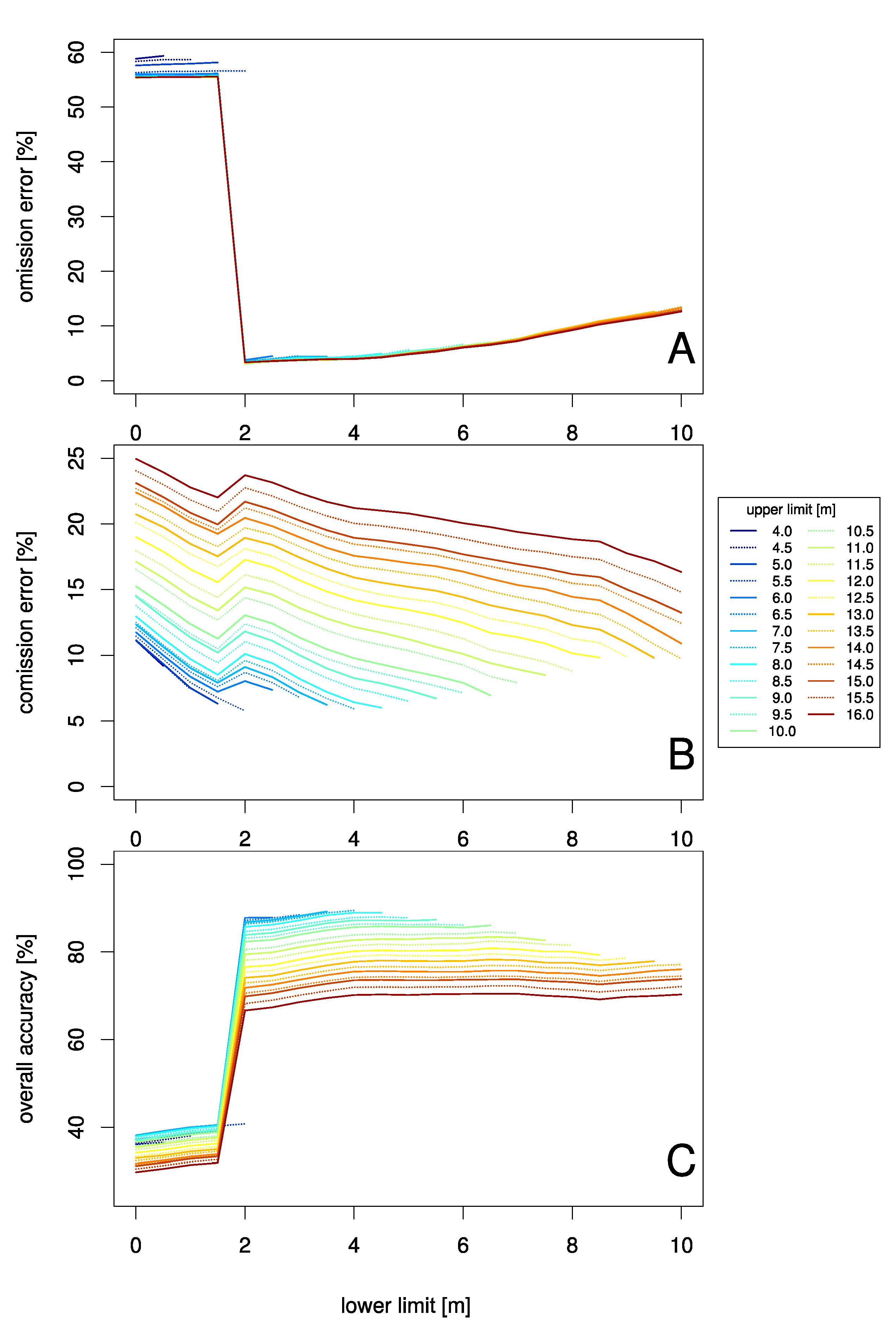
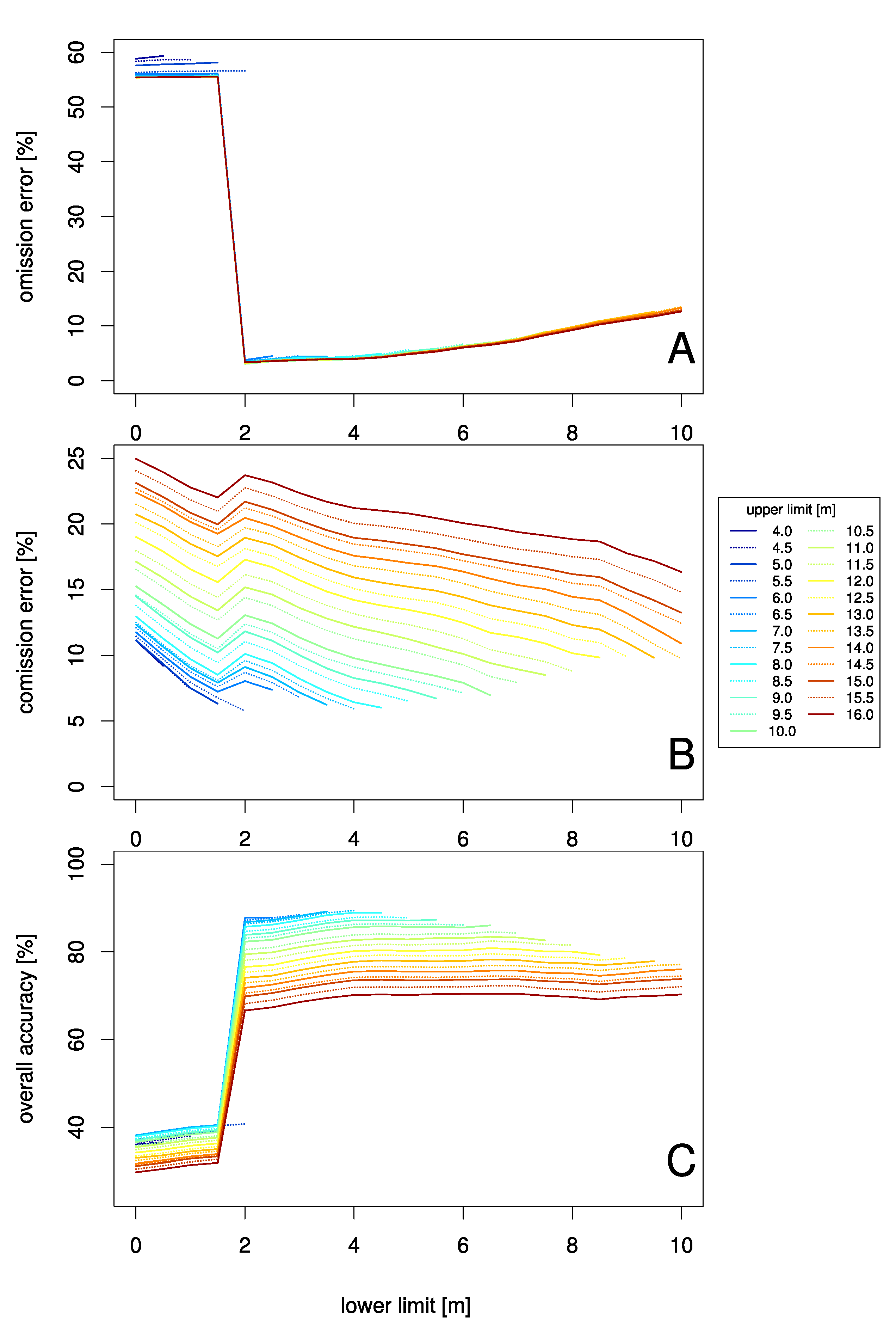
4.1. Subset from Point Clouds with Lower and Upper Limit
4.2. Transferability to Other Stands
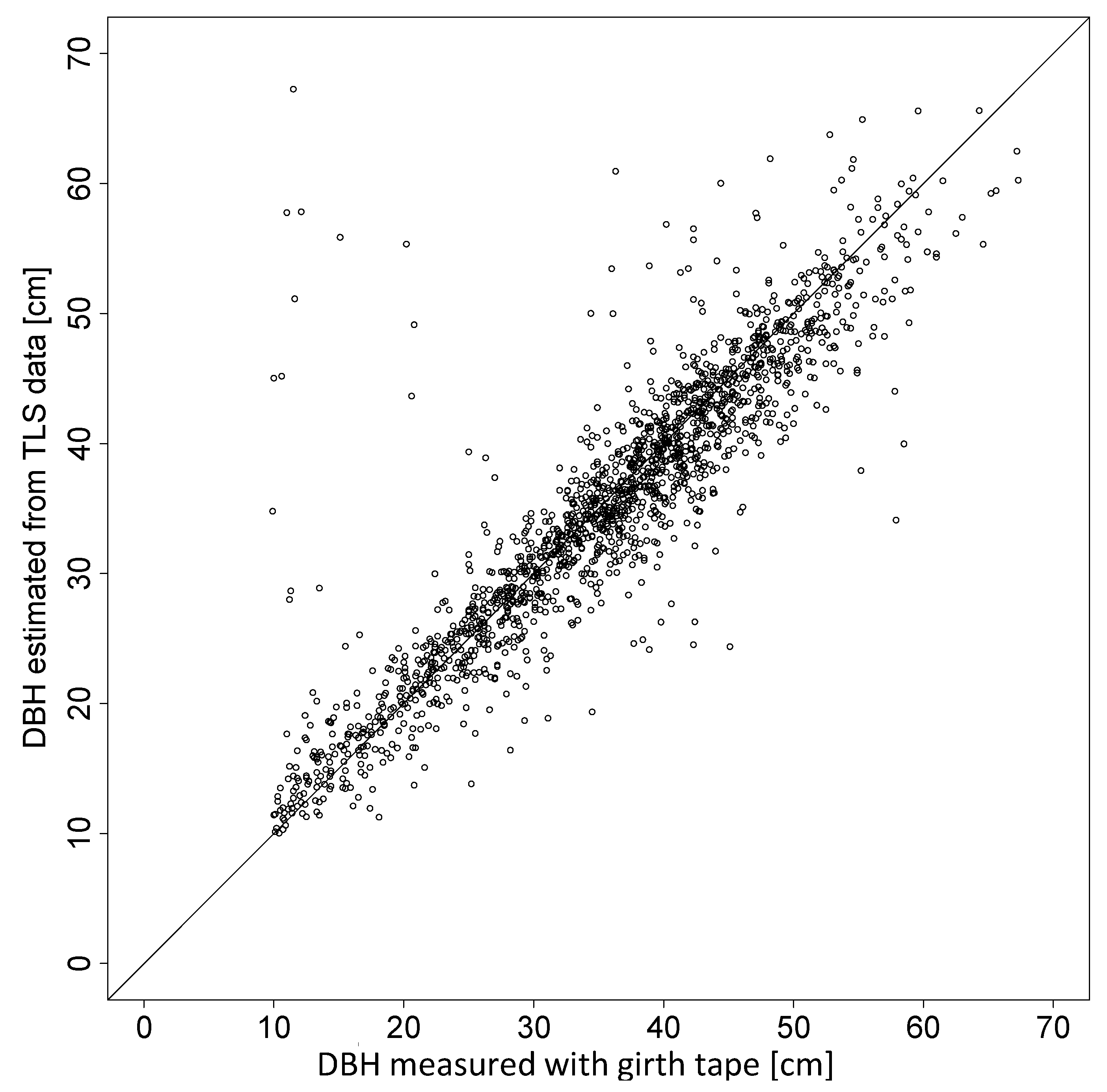
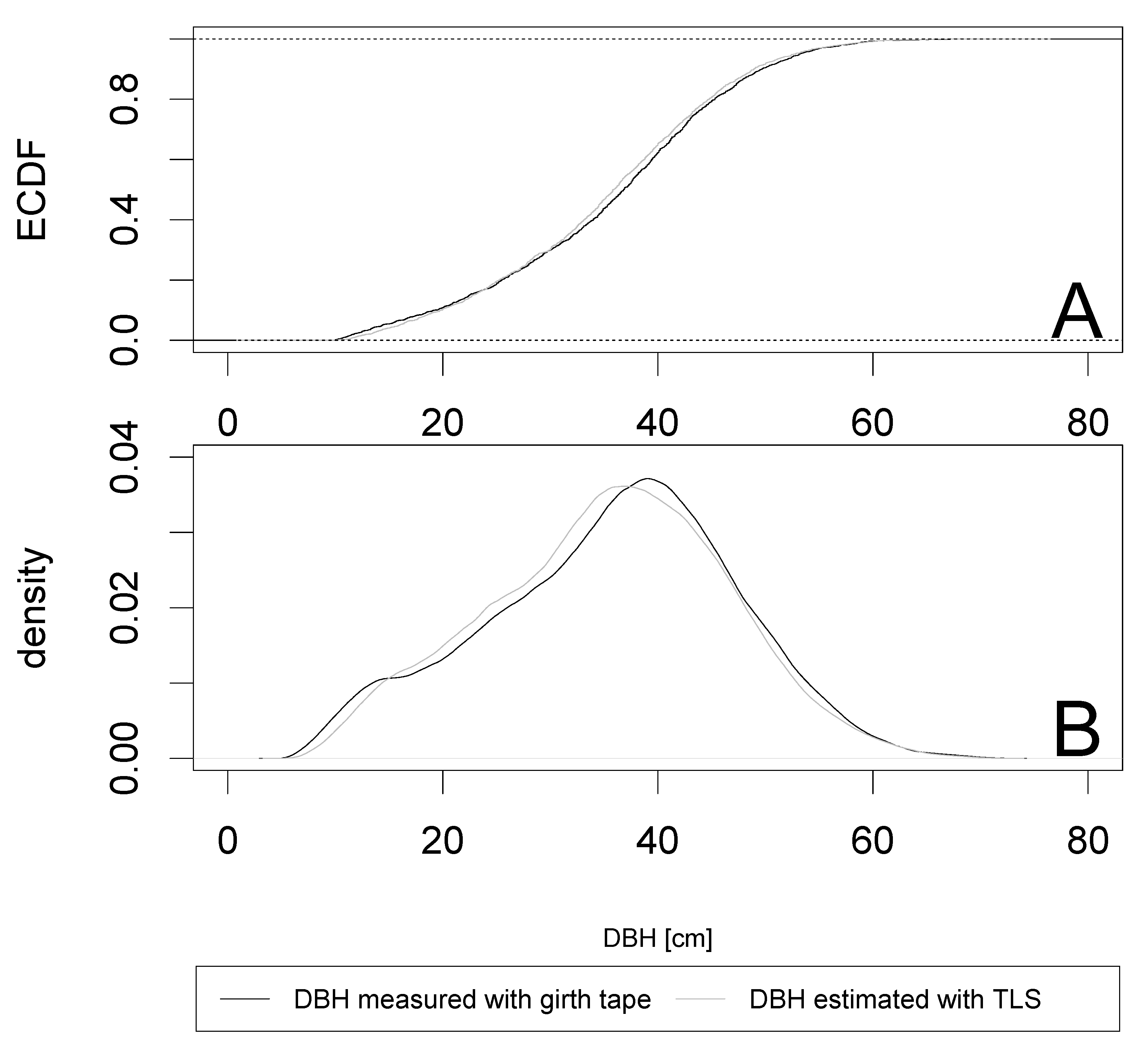
4.3. Estimation of DBH and Basal Area
4.4. Verification of Automatically Detected Tree Positions
4.5. Edge Effects
4.6. Comparison with Other Studies
4.6.1. Tree Detection
4.6.2. DBH Measurement
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step No. | Step/Sub-Step | Software | Package/Function | Parameters | ||
|---|---|---|---|---|---|---|
| 1 | Co-registration of scans | FARO Scene | ||||
| 2 | Export in .xyz format | |||||
| 3 | Import data | LAStools | txt2las | |||
| 4 | Coordinate transformation | las2las | - rotate_xy −8.25 0 0 - reoffset −3329.372 282345.7 0 | |||
| 5 | Thinning the point cloud | lasthin | - keep_every_nth 2 | |||
| 6 | Splitting point cloud into 1087 tiles | lastile | - tile_size 10 - buffer 2 | |||
| 7 | Filtering | lasnoise | - step 0.35 - isolation 850 | |||
| 8 | Differentiate between ground points and non-ground points. Normalize relative to the DEM | lasground | - step 1 - spike 0.4 - bulge 0.5 - offset 0.1 - replace z | |||
| 9 | Re-merge the tiles and remove the ground points | lastile | - drop_classification 2 | |||
| 10 | Splitting point cloud into 155 tiles | lastile | - tile_size 25 - buffer 5 | |||
| 11 | Export in txt format | las2txt | ||||
| 12 | Import data | R | data.table | fread() | ||
| 13a | Stage one clustering | Estimate cut off distance | densityClust | estimateDc() | NeighbourhoodRateLow = 0.005 NeighbourhoodRateHigh = 0.01 | |
| 13b | Calculate local density | densityClust() | Dc = [estimated dc from estimateDc()] | |||
| 13c | Find cluster centroids | findClusters() | rho = 2 delta = 0.5 | |||
| 14a | Stage two clustering | Calculate local density | densityClust | densityClust() | Dc = 0.04 | |
| 14b | Find cluster centroids | findClusters() | rho = 2 delta = 0.5 | |||
| 14c | Join clusters with a distance of less than 50 cm | spatstat | connected.ppp() | R = 0.5 | ||
| 15a | Assignment of tree locations | Construct -convex hull | alphahull | ahull() | Alpha = 30 | |
| 15b | Point assignment | spatstat | pppdist() | Cutoff = 1.5 | ||
| 16a | Diameter estimation | DBH | edci | circMclust() | Nx = 25 ny = 25 nr = 5 | |
| conicfit | LMcircleFit | |||||
| EllipseDirectFit | ||||||
| 16b | Upper Diameter | edci | circMclust() | Nx = 25 ny = 25 nr = 5 | ||
| conicfit | LMcircleFit | |||||
| EllipseDirectFit | ||||||
References
- Köhl, M.; Magnussen, S.S.; Marchetti, M. Sampling Methods, Remote Sensing and GIS Multiresource Forest Inventory; Springer-Verlag: Berlin/Heidelberg, Germany, 2006; ISBN 978-3-540-32572-7. [Google Scholar]
- MCPFE. Background information for improved Pan-European indicators for sustainable forest management. In Proceedings of the Ministerial Conference on the Protection of Forests in Europe (MCPFE) Liaison Unit, Vienna, Austria, 7–8 October 2002. [Google Scholar]
- MCPFE. State of Europe’s Forests 2003: The MCPFE report on sustainable forest management in Europe. In Proceedings of the Ministerial Conference on the Protection of Forests in Europe (MCPFE) Liaison Unit, Vienna, Austria, 28–30 April 2003. [Google Scholar]
- IUFRO. Guidelines for Designing Multipurpose Resource Inventories: A Project of IUFRO Research Group 4.02.02; Lund, H.G., Ed.; IUFRO World Series: Vienna, Austria, 1998; Volume 8. [Google Scholar]
- Kenning, R.S.; Ducey, M.J.; Brissette, J.C.; Gove, J.H. Field efficiency and bias of snag inventory methods. Can. J. For. Res. 2005, 35, 2900–2910. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Maltamo, M.; Bollandsås, O.M.; Gobakken, T.; Næsset, E. Large-scale prediction of aboveground biomass in heterogeneous mountain forests by means of airborne laser scanning. Can. J. For. Res. 2016, 1144, 1138–1144. [Google Scholar] [CrossRef]
- De Vries, W.; Vel, E.; Reinds, G.J.; Deelstra, H.; Klap, J.M.; Leeters, E.E.J.M.; Hendriks, C.M.A.; Kerkvoorden, M.; Landmann, G.; Herkendell, J.; et al. Intensive monitoring of forest ecosystems in Europe 1. Objectives, set-up and evaluation strategy. For. Ecol. Manag. 2003, 174, 77–95. [Google Scholar] [CrossRef]
- Mellert, K.H.; Deffner, V.; Küchenhoff, H.; Kölling, C. Modeling sensitivity to climate change and estimating the uncertainty of its impact: A probabilistic concept for risk assessment in forestry. Ecol. Modell. 2015, 316, 211–216. [Google Scholar] [CrossRef]
- IFER. Field-Map—Tool Designed for Computer Aided Field Data Collection. Available online: http://www.fieldmap.cz/ (accessed on 28 February 2017).
- Field, H.L. Landscape Surveying; Cengage Learning: Delmar, CA, USA, 2012; ISBN 1111310602. [Google Scholar]
- Culvenor, D.S. TIDA: An algorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery. Comput. Geosci. 2002, 28, 33–44. [Google Scholar] [CrossRef]
- Pouliot, D.; King, D.; Bell, F.; Pitt, D. Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration. Remote Sens. Environ. 2002, 82, 322–334. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser scanning of forest resources: the nordic experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Kwak, D.-A.; Lee, W.-K.; Lee, J.-H.; Biging, G.S.; Gong, P. Detection of individual trees and estimation of tree height using LiDAR data. J. For. Res. 2007, 12, 425–434. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkanen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M.; et al. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2012, 85, 27–40. [Google Scholar] [CrossRef]
- Maack, J.; Lingenfelder, M.; Weinacker, H.; Koch, B. Modelling the standing timber volume of Baden-Württemberg—A large-scale approach using a fusion of Landsat, airborne LiDAR and National Forest Inventory data. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 107–116. [Google Scholar] [CrossRef]
- Deo, R.K.; Froese, R.E.; Falkowski, M.J.; Hudak, A.T. Optimizing variable radius plot size and LiDAR resolution to model standing volume in conifer forests. Can. J. Remote Sens. 2016, 42, 428–442. [Google Scholar] [CrossRef]
- Scrinzi, G.; Clementel, F.; Floris, A. Angle count sampling reliability as ground truth for area-based LiDAR applications in forest inventories. Can. J. For. Res. 2015, 45, 506–514. [Google Scholar] [CrossRef]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.-W.; Waser, L.T.; Wynne, R.H.; Thenkabail, P.S. Terrestrial laser scanning as an effective tool to retrieve tree level height, crown width, and stem diameter. Remote Sens. 2015, 7, 1877–1896. [Google Scholar] [CrossRef]
- Yang, B.; Dai, W.; Dong, Z.; Liu, Y. Automatic forest mapping at individual tree levels from terrestrial laser scanning point clouds with a hierarchical minimum cut method. Remote Sens. 2016, 8, 372. [Google Scholar] [CrossRef]
- Hager, H. Die Klimastationen im lehrforst der universität für bodenkultur. Allg. Forstzeitung 1980, 91, 54–57. [Google Scholar]
- Glatzel, G.; Sieghardt, M. Die Böden des Lehrforstes. Allg. Forstztg. 1980, 91, 53–54. [Google Scholar]
- Haglöf Measurement Solutions in Forest and Field. Available online: http://www.haglofcg.com/index.php/en/products/instruments/height/341-vertex-iv (accessed on 17 March 2017).
- FARO Laser Scanner FARO Focus3D—Overview—3D Surveying. Available online: http://www.faro.com/en-us/products/3d-surveying/faro-focus3d/overview (accessed on 28 February 2017).
- FARO FARO Laser Scanner Software—SCENE—Overview. Available online: http://www.faro.com/en-us/products/faro-software/scene/overview (accessed on 28 February 2017).
- Isenburg, M. LAStools—Efficient LiDAR Processing Software (version 160429, Academic). Available online: https://rapidlasso.com/lastools/ (accessed on 28 February 2017).
- R Development Core Team. R: A Language and Environment for Statistical Computing, R Version 3.3.2; R Foundation for Statistical Computing: Vienna, Austria, 2016.
- Rodriguez, A.; Laio, A. Clustering by fast search and find of density peaks. Science 2014, 344, 1492–1496. [Google Scholar] [CrossRef] [PubMed]
- Pedersen, T.L.; Hughes, S. Densityclust: Clustering by Fast Search and Find of Density Peaks, R package version 0.2.1; 2016. Available online: https://cran.r-project.org/package=densityClust (accessed on 15 June 2017).
- Baddeley, A.; Rubak, E.; Turner, R. Spatial Point Patterns: Methodology and Applications with R; Chapman and Hall/CRC Press: London, UK, 2015. [Google Scholar]
- Edelsbrunner, H.; Kirkpatrick, D.; Seidel, R. On the shape of a set of points in the plane. IEEE Trans. Inf. Theory 1983, 29, 551–559. [Google Scholar] [CrossRef]
- Pateiro-Lopez, B.; Rodriguez-Casal, A. Alphahull: Generalization of the Convex Hull of a Sample of Points in the Plane, R package version 2.1; 2016. Available online: https://cran.r-project.org/package=alphahull (accessed on 15 June 2017).
- Müller, C.H.; Garlipp, T. Simple consistent cluster methods based on redescending M-estimators with an application to edge identification in images. J. Multivar. Anal. 2005, 92, 359–385. [Google Scholar] [CrossRef]
- Garlipp, T. Edci: Edge Detection and Clustering in Images. 2016. Available online: https://CRAN.R-project.org/package=edci (accessed on 17 June 2017).
- Chernov, N. Circular and Linear Regression: Fitting Circles and Lines by Least Squares; CRC Press: Taylor & Francis Group, Boca Raton, Florida, USA, 2011; ISBN 9781439835906. [Google Scholar]
- Gama, J.; Chernov, N. Conicfit: Algorithms for Fitting Circles, Ellipses and Conics Based on the Work by Prof. Nikolai Chernov, R package version 1.0.4; 2015. Available online: https://CRAN.R-project.org/package=conicfit (accessed on 17 June 2017).
- Fitzgibbon, A.W.; Pilu, M.; Fisher, R.B. Direct least squares fitting of ellipses. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 21, 476–480. [Google Scholar] [CrossRef]
- Maas, H.-G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1593–1879. [Google Scholar] [CrossRef]
- Xia, S.; Wang, C.; Pan, F.; Xi, X.; Zeng, H.; Liu, H. Detecting stems in dense and homogeneous forest using single-scan TLS. Forests 2015, 6, 3923–3945. [Google Scholar] [CrossRef]
- Astrup, R.; Ducey, M.J.; Granhus, A.; Ritter, T.; von Lüpke, N. Approaches for estimating stand-level volume using terrestrial laser scanning in a single-scan mode. Can. J. For. Res. 2014, 44, 666–676. [Google Scholar] [CrossRef]
- Ducey, M.J.; Astrup, R. Adjusting for nondetection in forest inventories derived from terrestrial laser scanning. Can. J. Remote Sens. 2013, 39, 410–425. [Google Scholar]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree stem and height measurements using terrestrial laser scanning and the RANSAC algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef]
- Thies, M.; Spiecker, H. Evaluation and future prospects of terrestrial laser scanning for standardized forest inventories. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 36, 192–197. [Google Scholar]
- Strahler, A.H.; Jupp, D.L.; Woodcock, C.E.; Schaaf, C.B.; Yao, T.; Zhao, F.; Yang, X.; Lovell, J.; Culvenor, D.; Newnham, G.; et al. Retrieval of forest structural parameters using a ground-based lidar instrument (Echidna®). Can. J. Remote Sens. 2008, 34, 426–440. [Google Scholar] [CrossRef]
- Brolly, G.; Kiraly, G. Algorithms for stem mapping by means of terrestrial laser scanning. Acta Silv. Lign. Hung 2009, 5, 119–130. [Google Scholar]
- Murphy, G.E.; Acuna, M.A.; Dumbrell, I. Tree value and log product yield determination in radiata pine (Pinus radiata) plantations in Australia: comparisons of terrestrial laser scanning with a forest inventory system and manual measurements. Can. J. For. Res. 2010, 40, 2223–2233. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Newnham, G.J.; Culvenor, D.S. Measuring tree stem diameters using intensity profiles from ground-based scanning lidar from a fixed viewpoint. ISPRS J. Photogramm. Remote Sens. 2011, 66, 46–55. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic stem mapping using single-scan terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef] [PubMed]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A benchmark of lidar-based single tree detection methods using heterogeneous forest data from the alpine space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef] [Green Version]
- Dalponte, M.; Reyes, F.; Kandarre, K.; Gianelle, D. Delineation of individual tree crowns from ALS and hyperspectral data: A comparison among four methods. Eur. J. Remote Sens. 2015, 48, 365–382. [Google Scholar] [CrossRef]
| (m) | (°) | ||
|---|---|---|---|
| FieldMap x-coordinate | −3612.23 | 1.003 | 3.24 |
| TLS x-coordinate | −3329.37 | 1.000 | 8.25 |
| FieldMap y-coordinate | 282,336.70 | 1.004 | 3.24 |
| TLS y-coordinate | 282,345.70 | 1.000 | 8.25 |
| Spruce | Fir | Larch | Pine | Beech | Other Broad Leaf | NA | Total | |
|---|---|---|---|---|---|---|---|---|
| FieldMap sampled | 684 | 259 | 65 | 91 | 678 | 12 | 1789 | |
| FieldMap corrected | 684 | 259 | 65 | 91 | 678 | 12 | 27 | 1816 |
| correct detections | 664 | 239 | 62 | 87 | 624 | 10 | 27 | 1713 |
| false positive detections | 49 | 49 | ||||||
| missed tree positions | 20 | 20 | 3 | 4 | 54 | 2 | 103 |
| Min. (cm) | 1st Quartile (cm) | Median (cm) | 3rd Quartile (cm) | Max. (cm) | Mean (cm) | SD (cm) | |
|---|---|---|---|---|---|---|---|
| Girth tape measurements | 10.0 | 28.0 | 36.3 | 43.5 | 67.3 | 35.0 | 11.4 |
| TLS based estimates | 10.0 | 27.2 | 35.6 | 43.0 | 67.2 | 34.9 | 11.3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ritter, T.; Schwarz, M.; Tockner, A.; Leisch, F.; Nothdurft, A. Automatic Mapping of Forest Stands Based on Three-Dimensional Point Clouds Derived from Terrestrial Laser-Scanning. Forests 2017, 8, 265. https://doi.org/10.3390/f8080265
Ritter T, Schwarz M, Tockner A, Leisch F, Nothdurft A. Automatic Mapping of Forest Stands Based on Three-Dimensional Point Clouds Derived from Terrestrial Laser-Scanning. Forests. 2017; 8(8):265. https://doi.org/10.3390/f8080265
Chicago/Turabian StyleRitter, Tim, Marcel Schwarz, Andreas Tockner, Friedrich Leisch, and Arne Nothdurft. 2017. "Automatic Mapping of Forest Stands Based on Three-Dimensional Point Clouds Derived from Terrestrial Laser-Scanning" Forests 8, no. 8: 265. https://doi.org/10.3390/f8080265