
SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR


 , , , , ,
, , , , , 
Abstract
:1. Introduction
2. Methods

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Type | GNSS | SLAM | IMU | Research Questions? |
|---|---|---|---|---|
| Open forest | Works | does not work | Works but there is drift | To use GNSS + IMU, no research need. |
| Mature but scattered forest with reasonably low vegetation | Should work to certain level | Should work | Works but there is drift | Question is can GNSS + SLAM be used as a direct georeferencing tool |
| Mature dense forests with reasonably low vegetation | May not work properly | Should work | Works but there is drift | Can SLAM improve GNSS + IMU solution in these cases? |
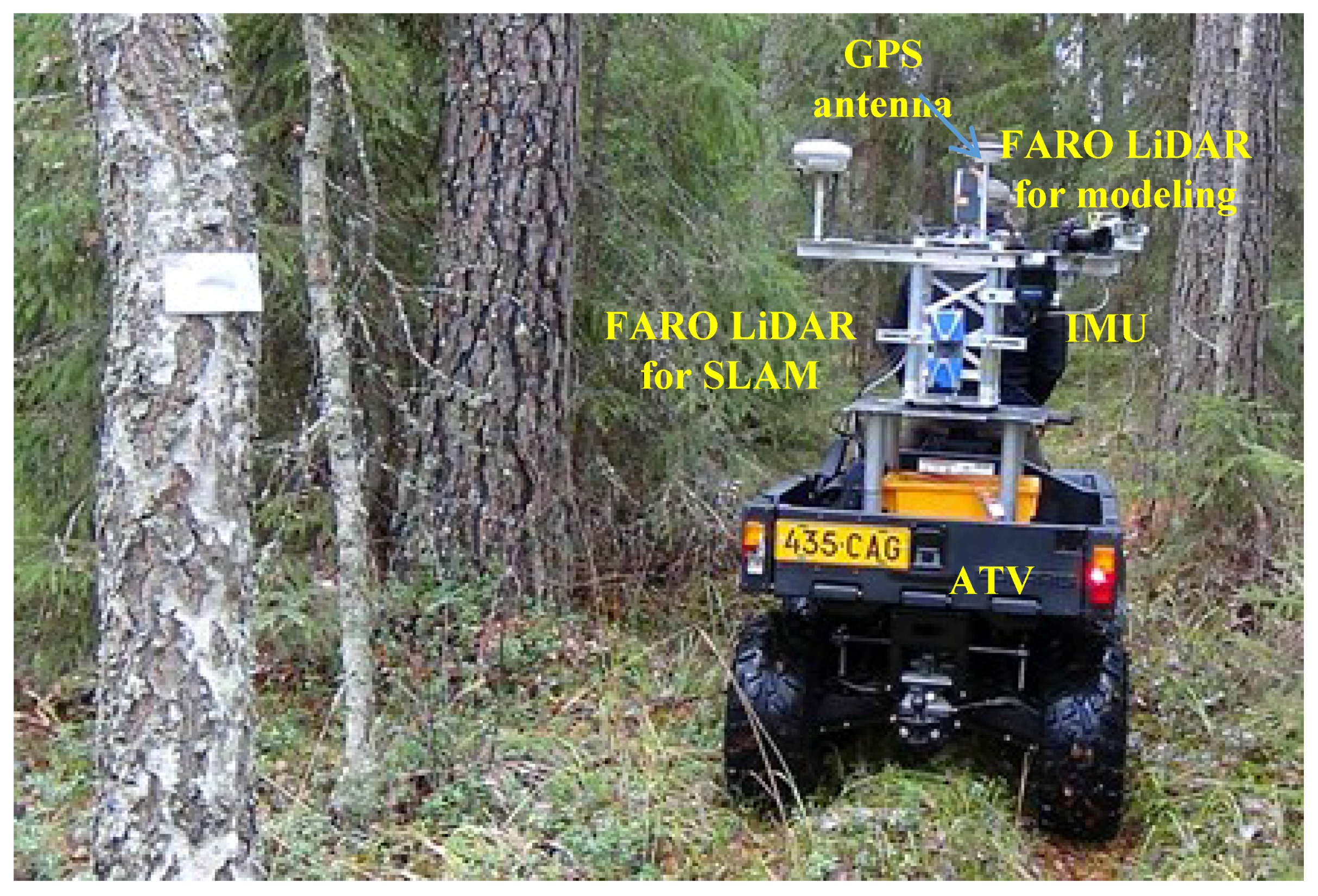
2.1. MLS System for Research
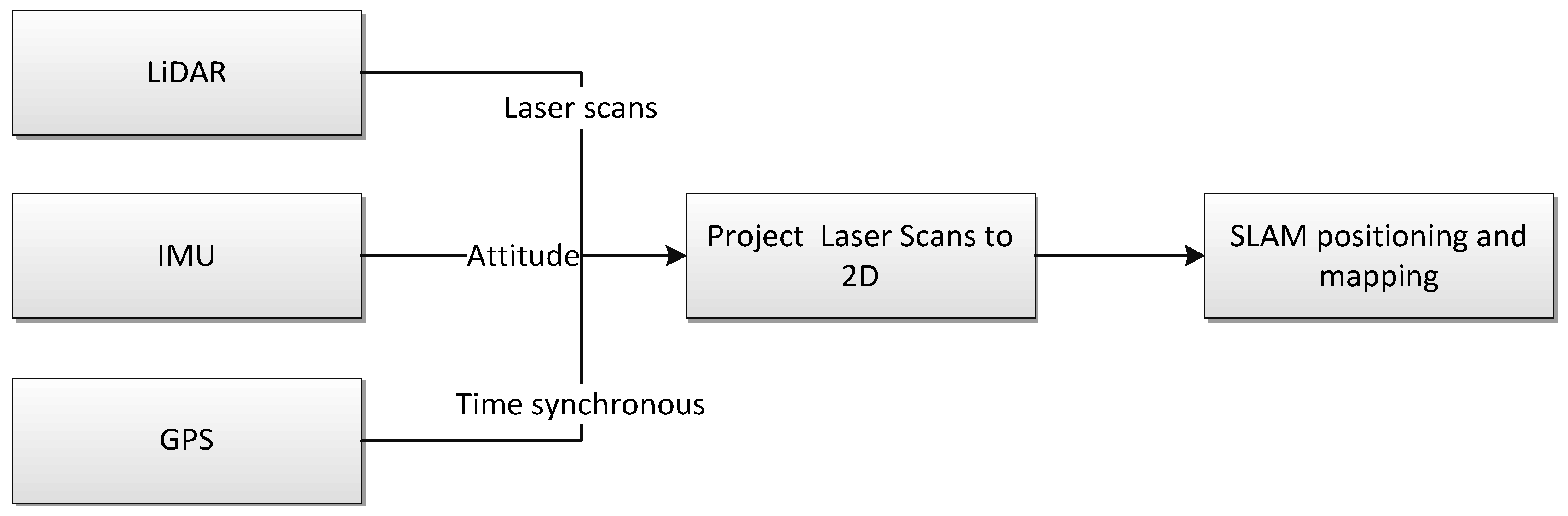
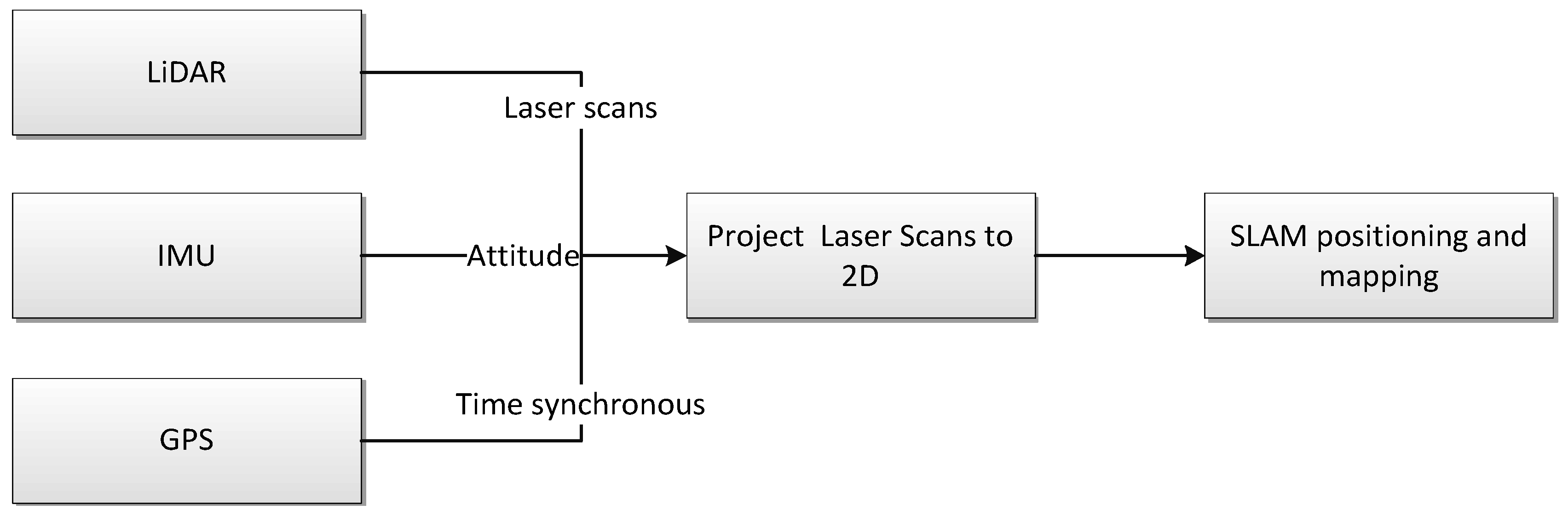
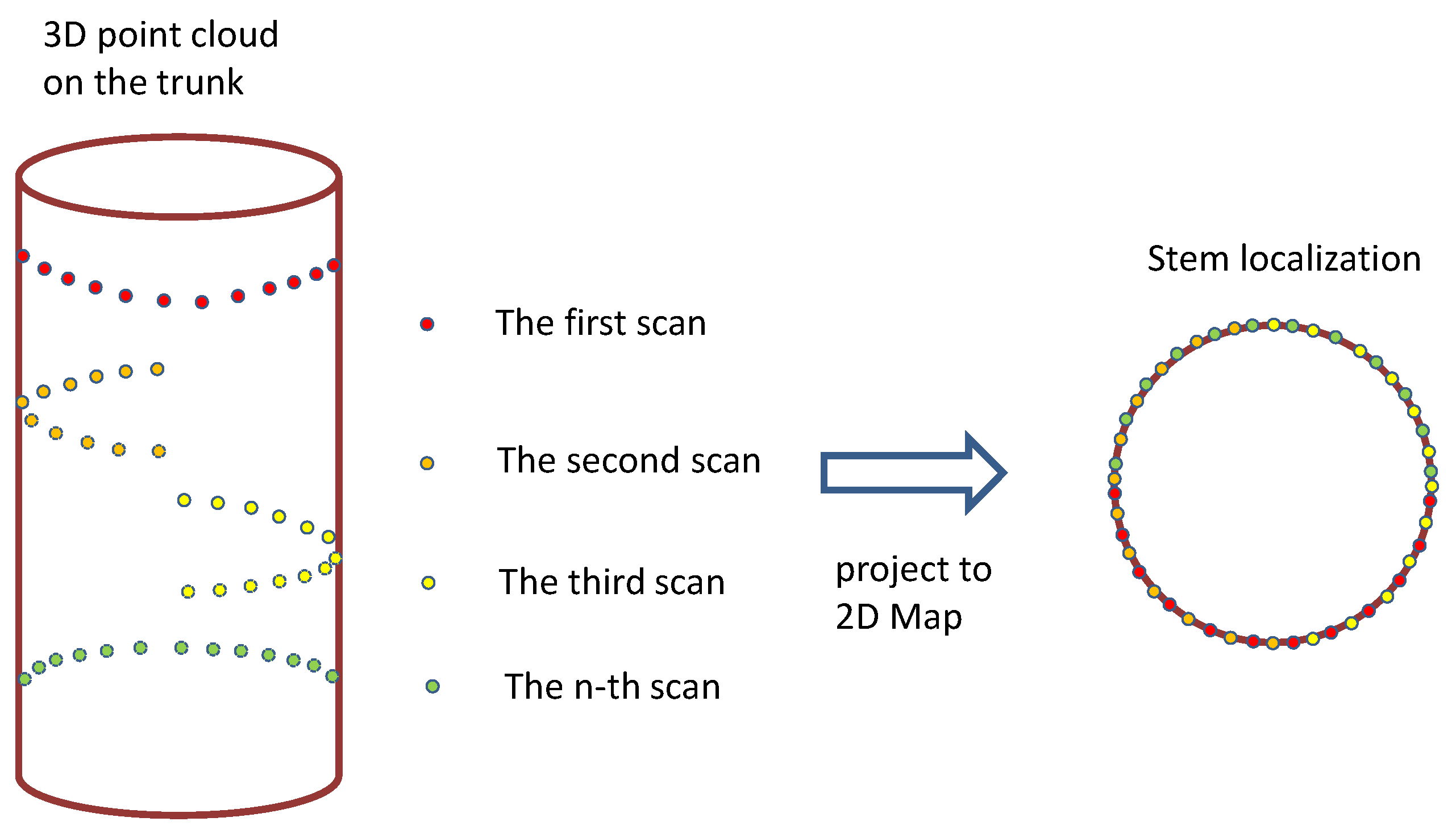
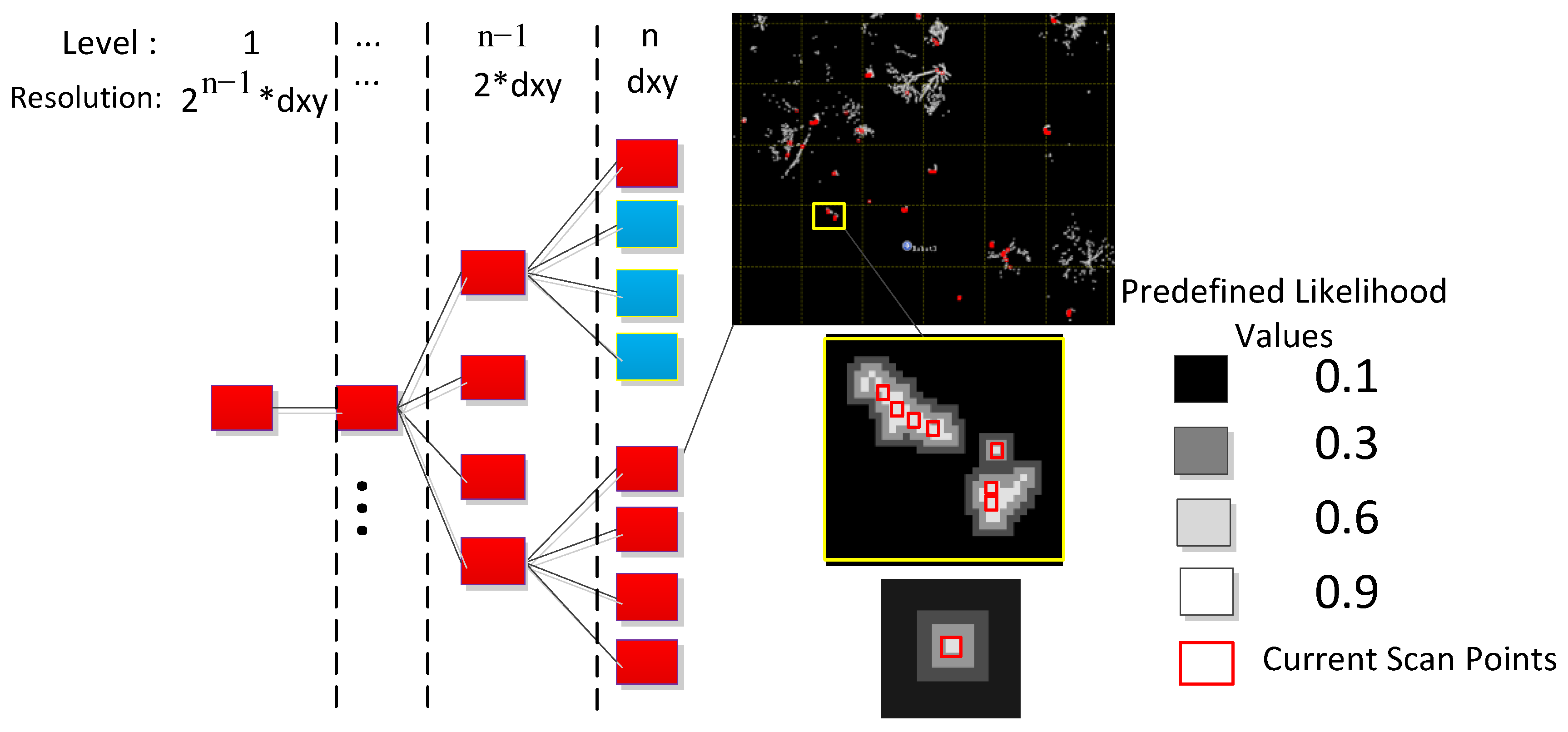
2.2. SLAM Developed for Forestry
3. Field Test
4. Results and Discussion

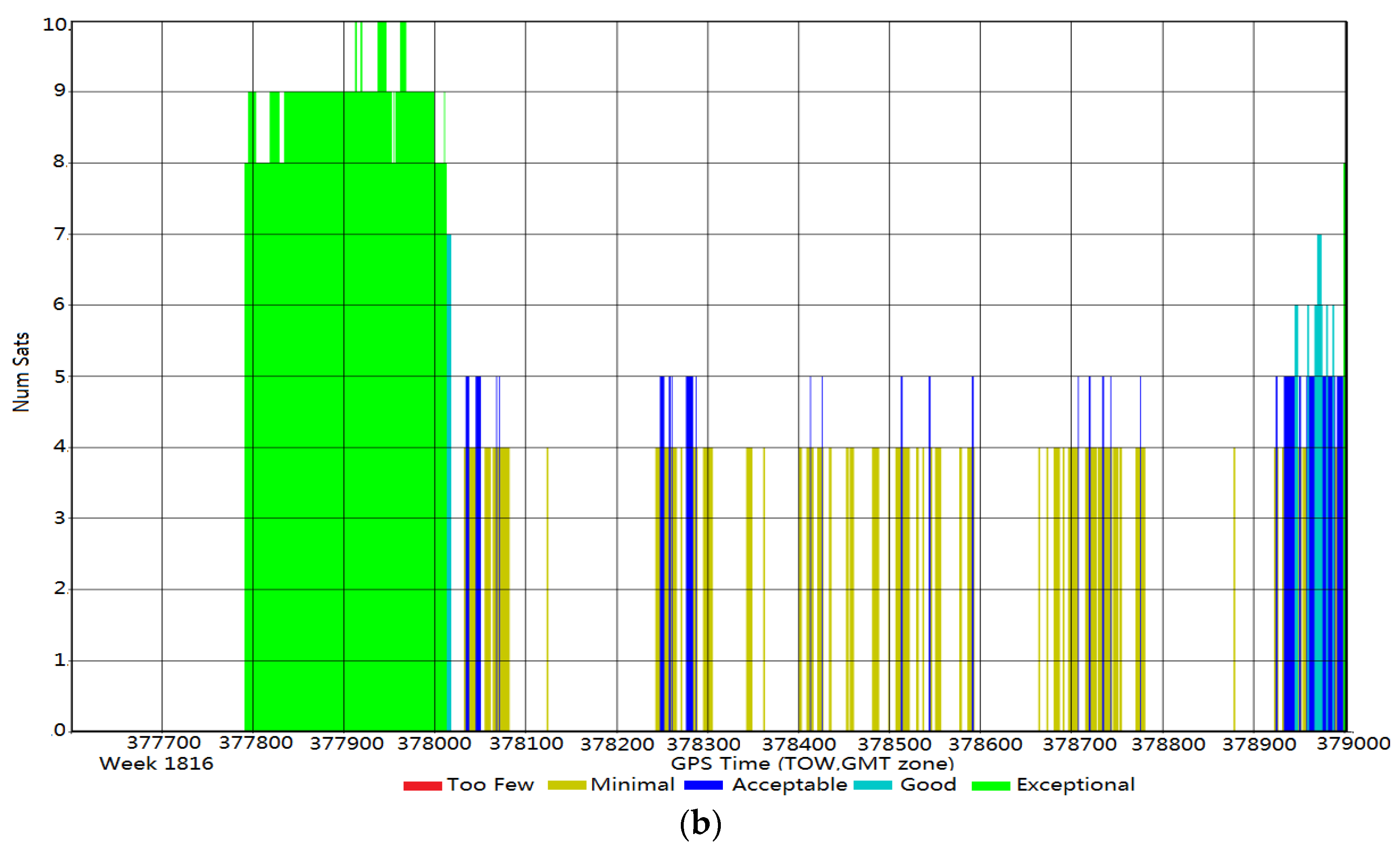
4.1. The Positioning Accuracy of the GNSS Only and GNSS + IMU Solutions
| RMSE (m) | Easting | Northing | 2D |
|---|---|---|---|
| GNSS only | 3.15 | 4.89 | 5.82 |
| GNSS + IMU | 0.51 | 0.35 | 0.62 |
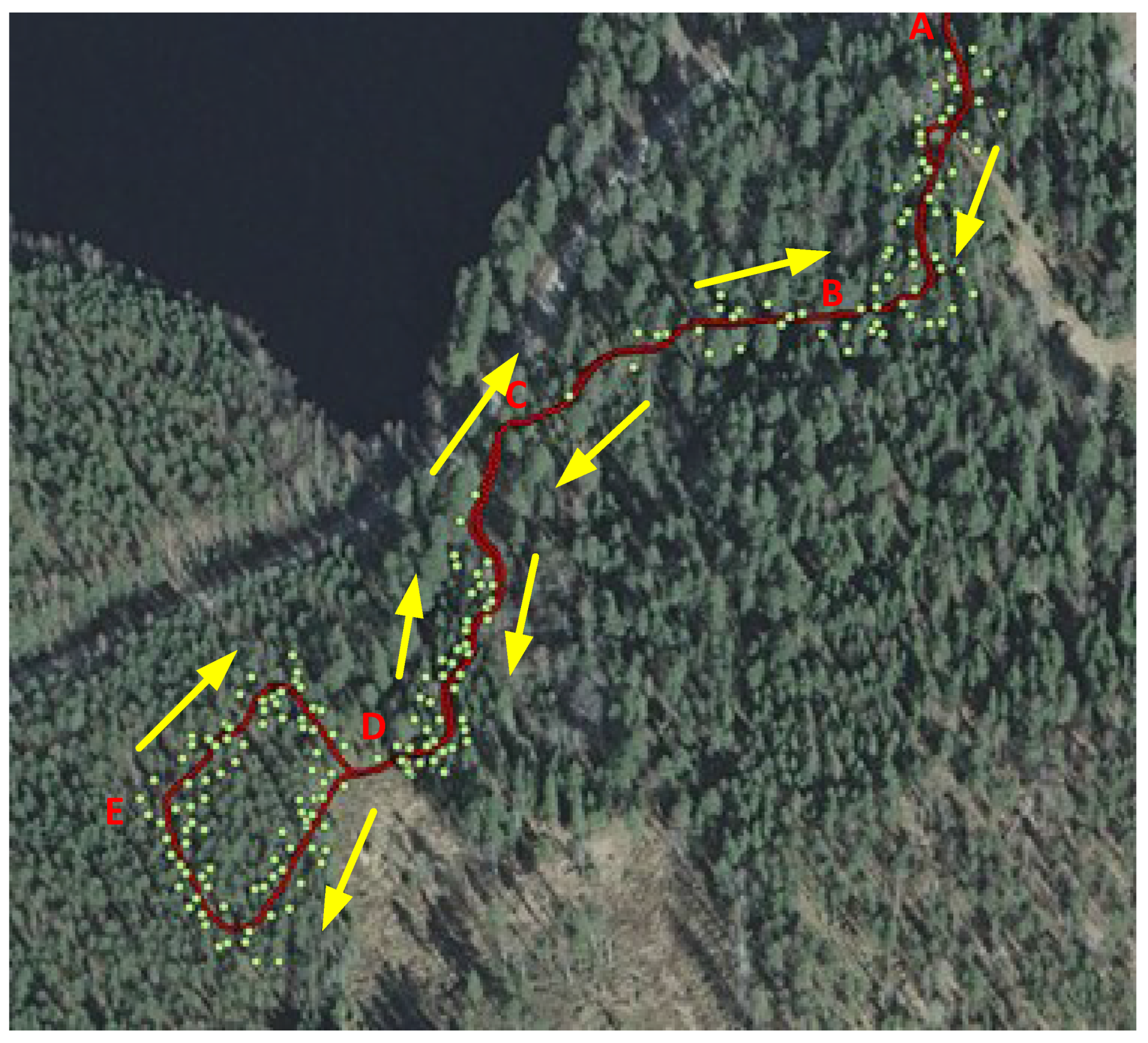
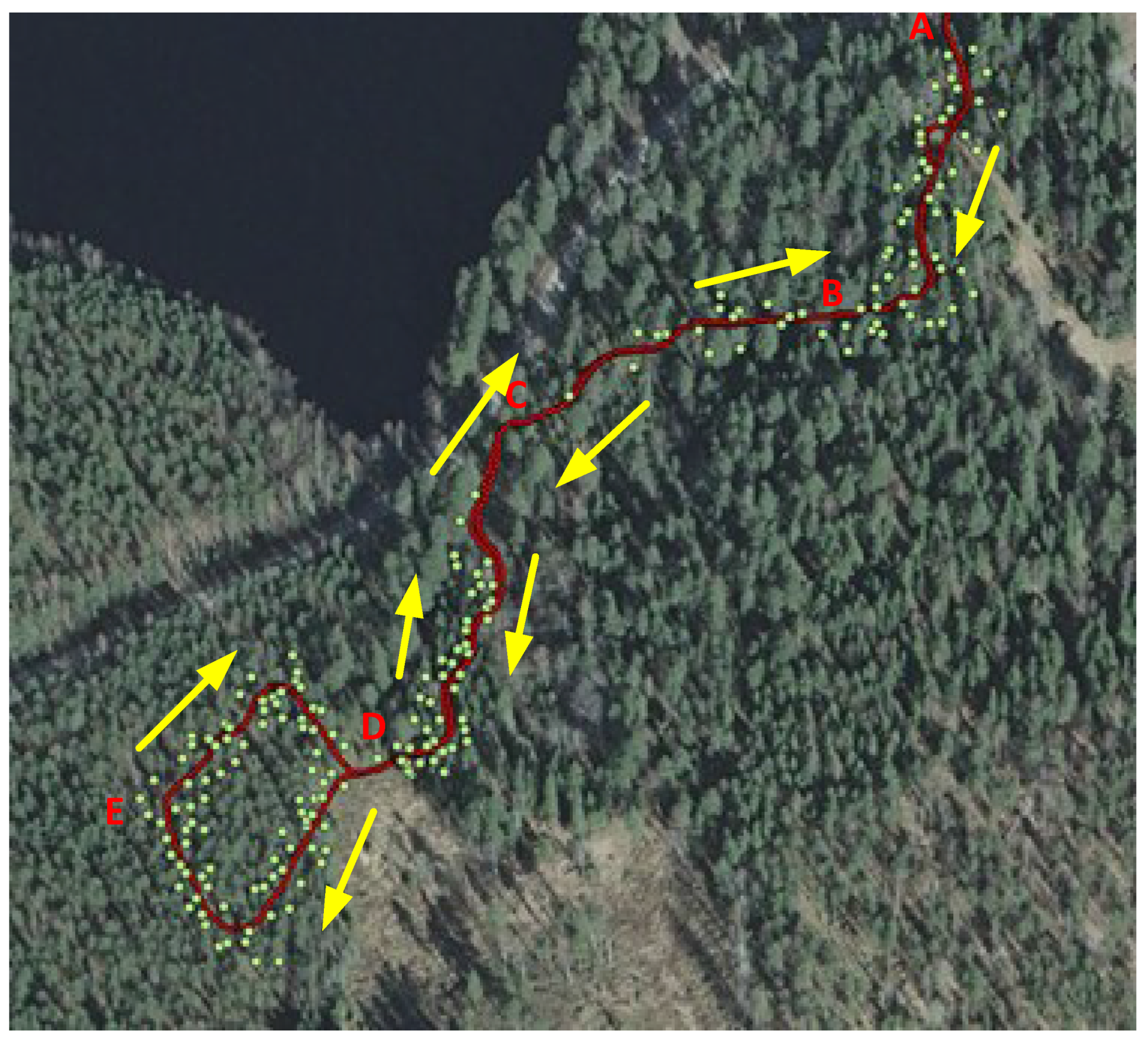
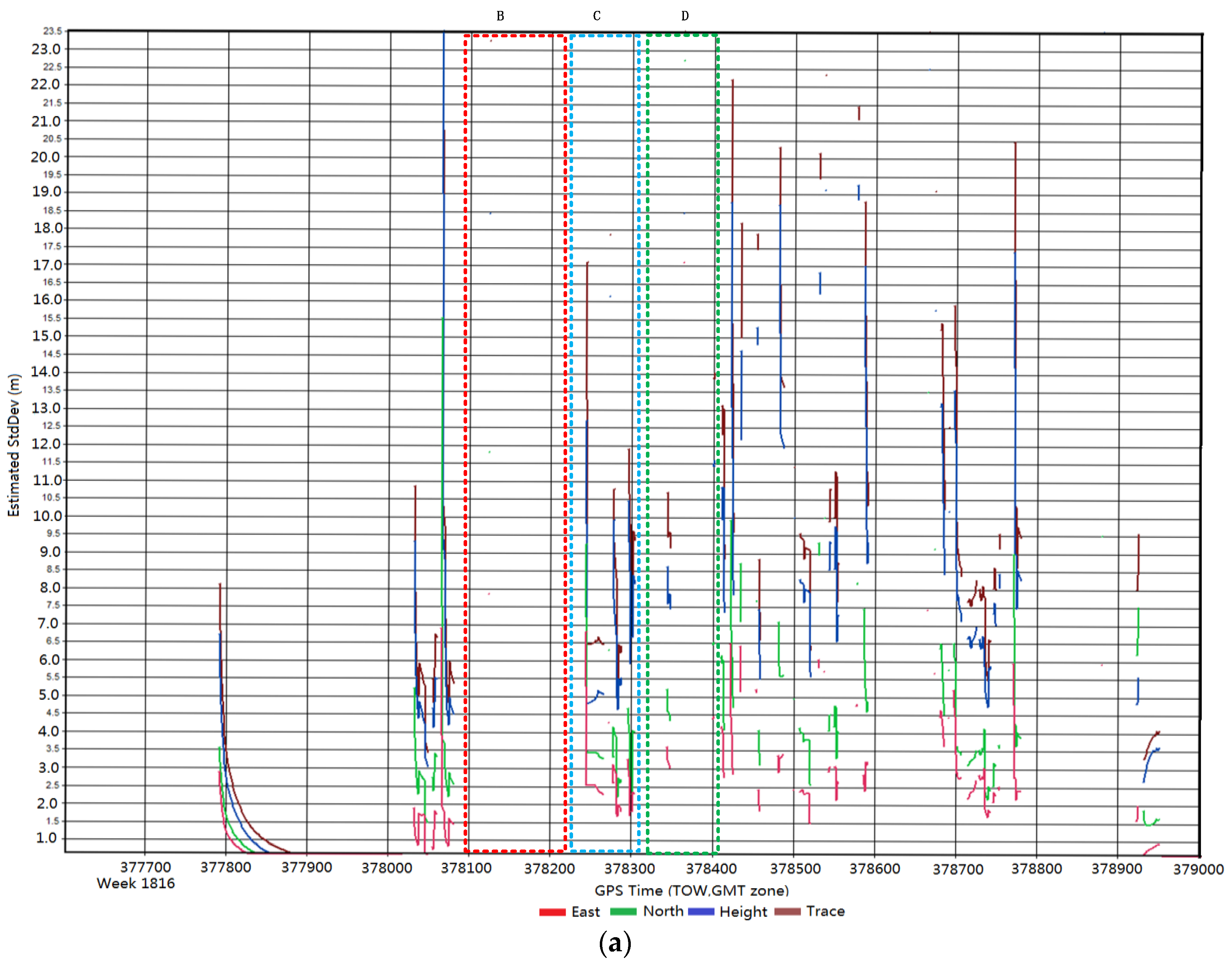
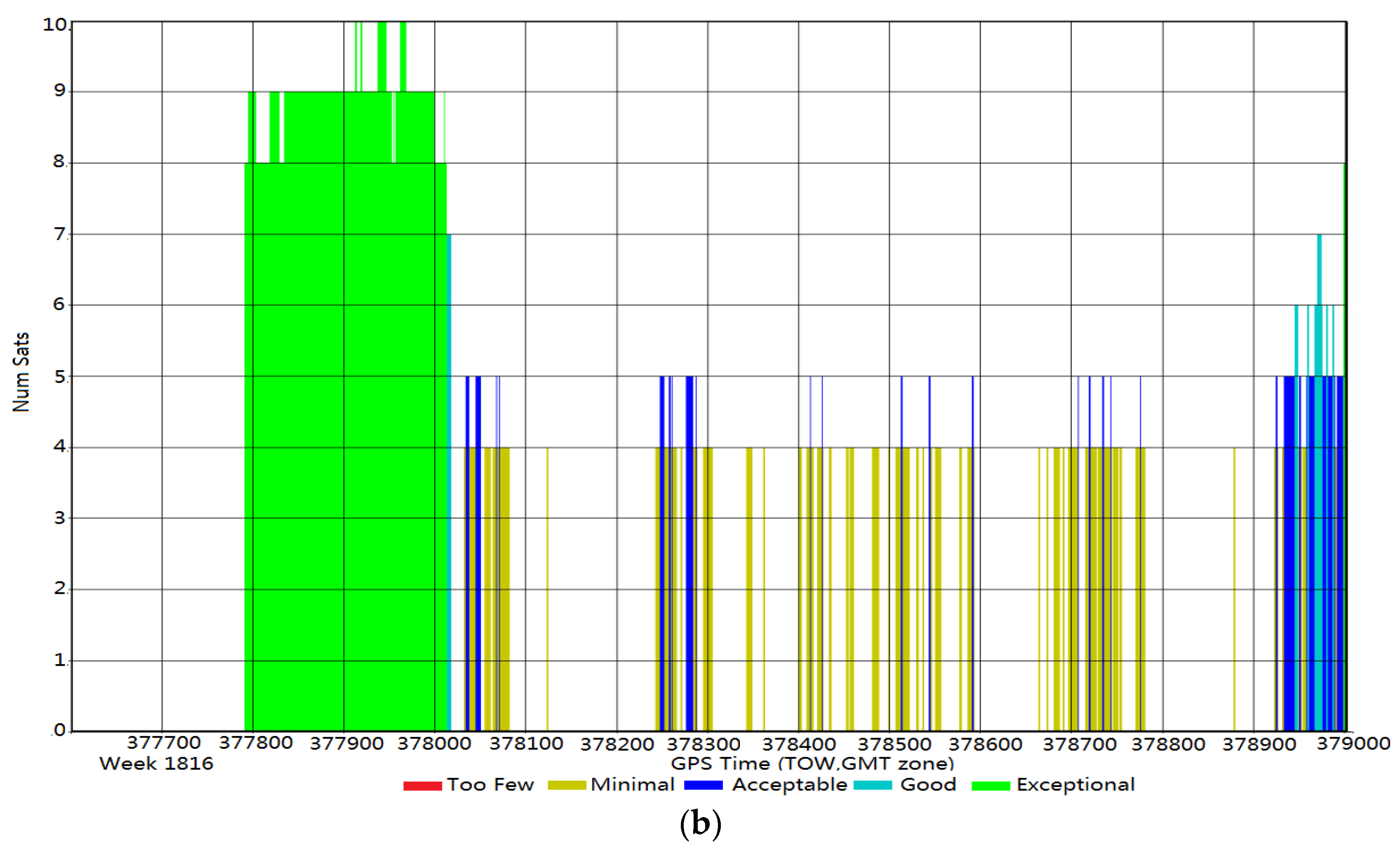
4.2. Evaluation of the Entire Test Path
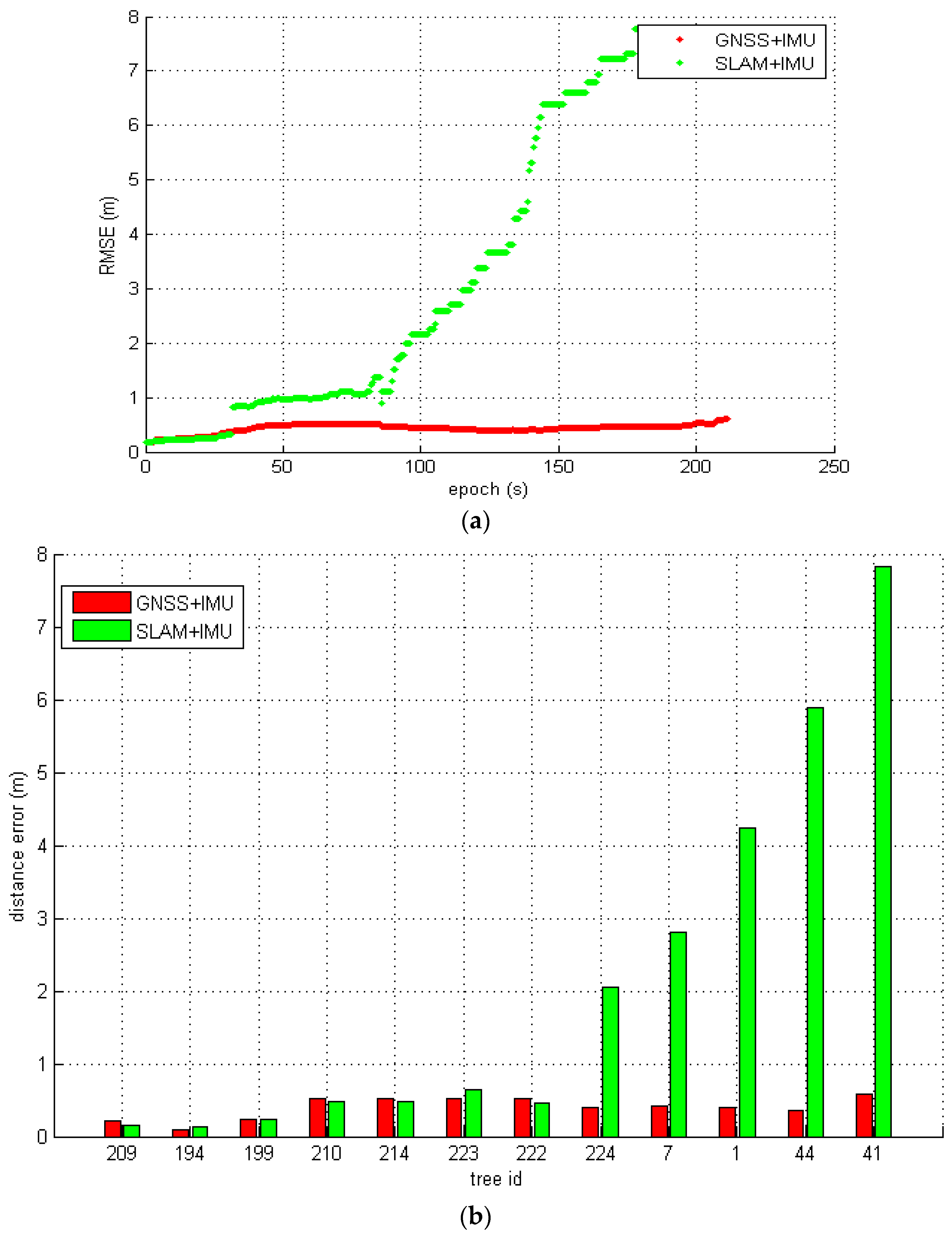
4.3. Evaluation in an Open Forest Area
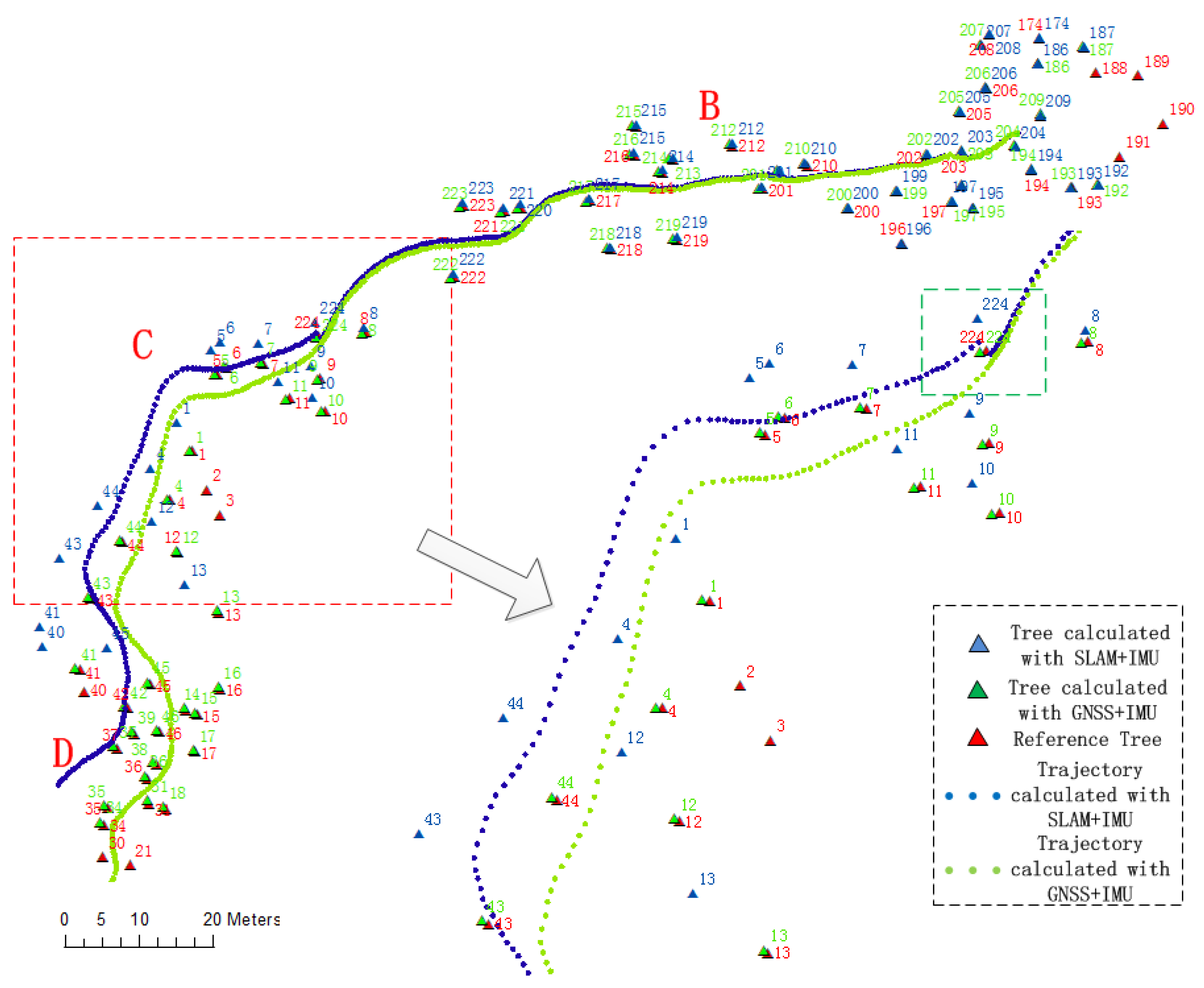
| Solution | RMSE | ||
|---|---|---|---|
| Easting | Northing | 2D | |
| GNSS + IMU | 0.36 | 0.19 | 0.40 |
| SLAM + IMU | 1.73 | 2.33 | 2.90 |
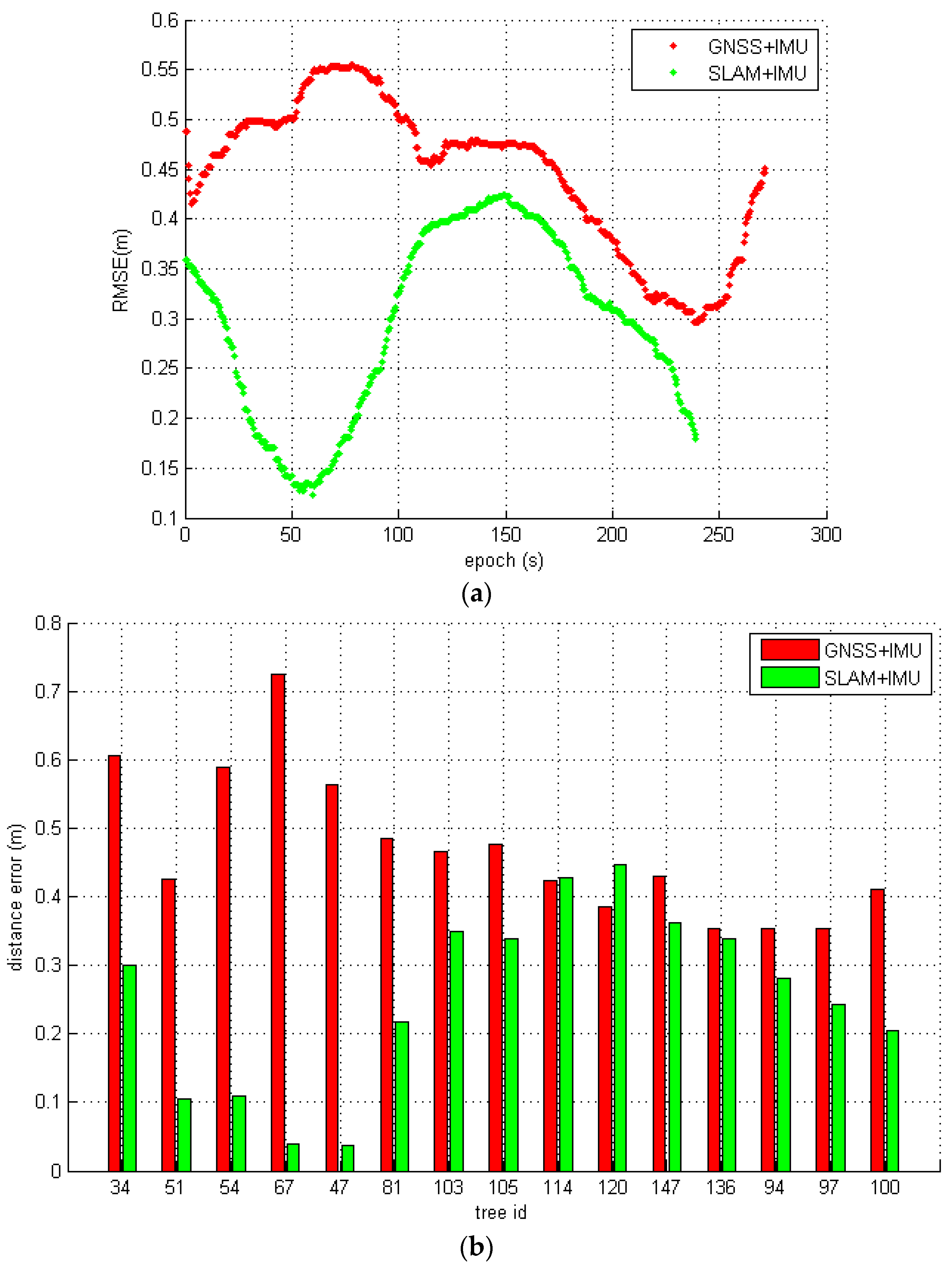
4.4. Evaluation in a Mature Forest Area
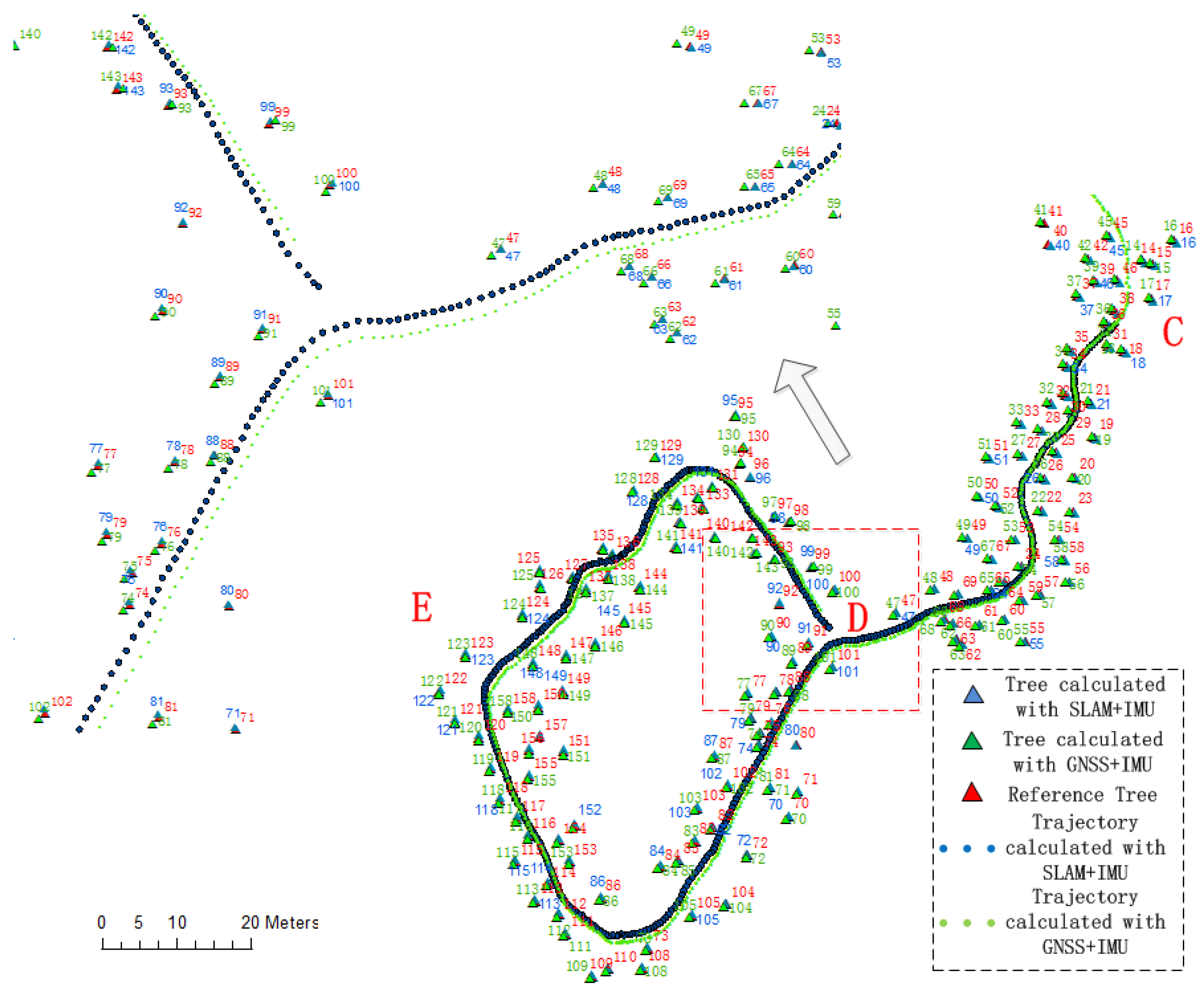
| RMSE (m) | Easting | Northing | 2D |
|---|---|---|---|
| GNSS + IMU | 0.36 | 0.32 | 0.52 |
| SLAM + IMU | 0.16 | 0.27 | 0.32 |
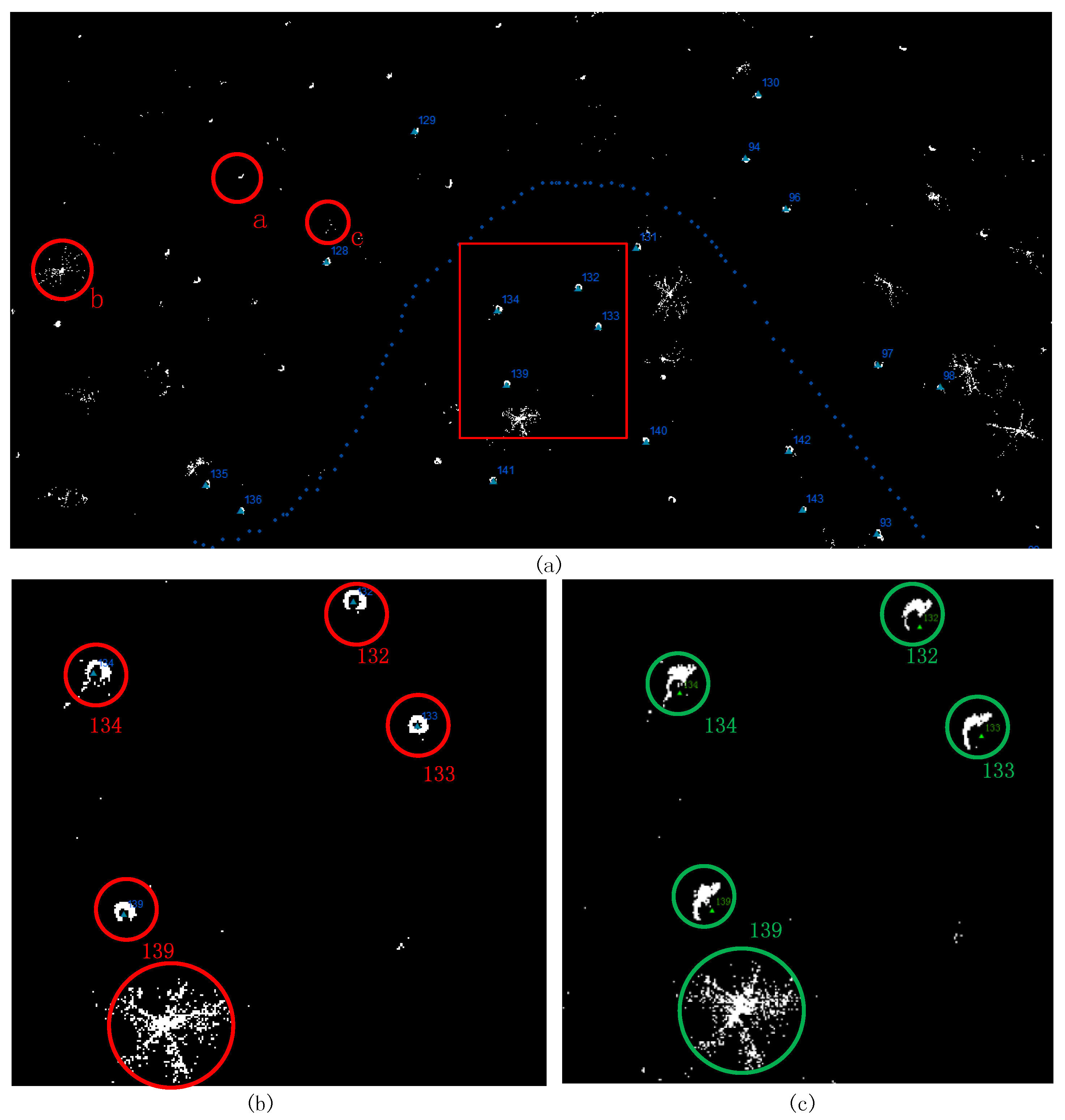
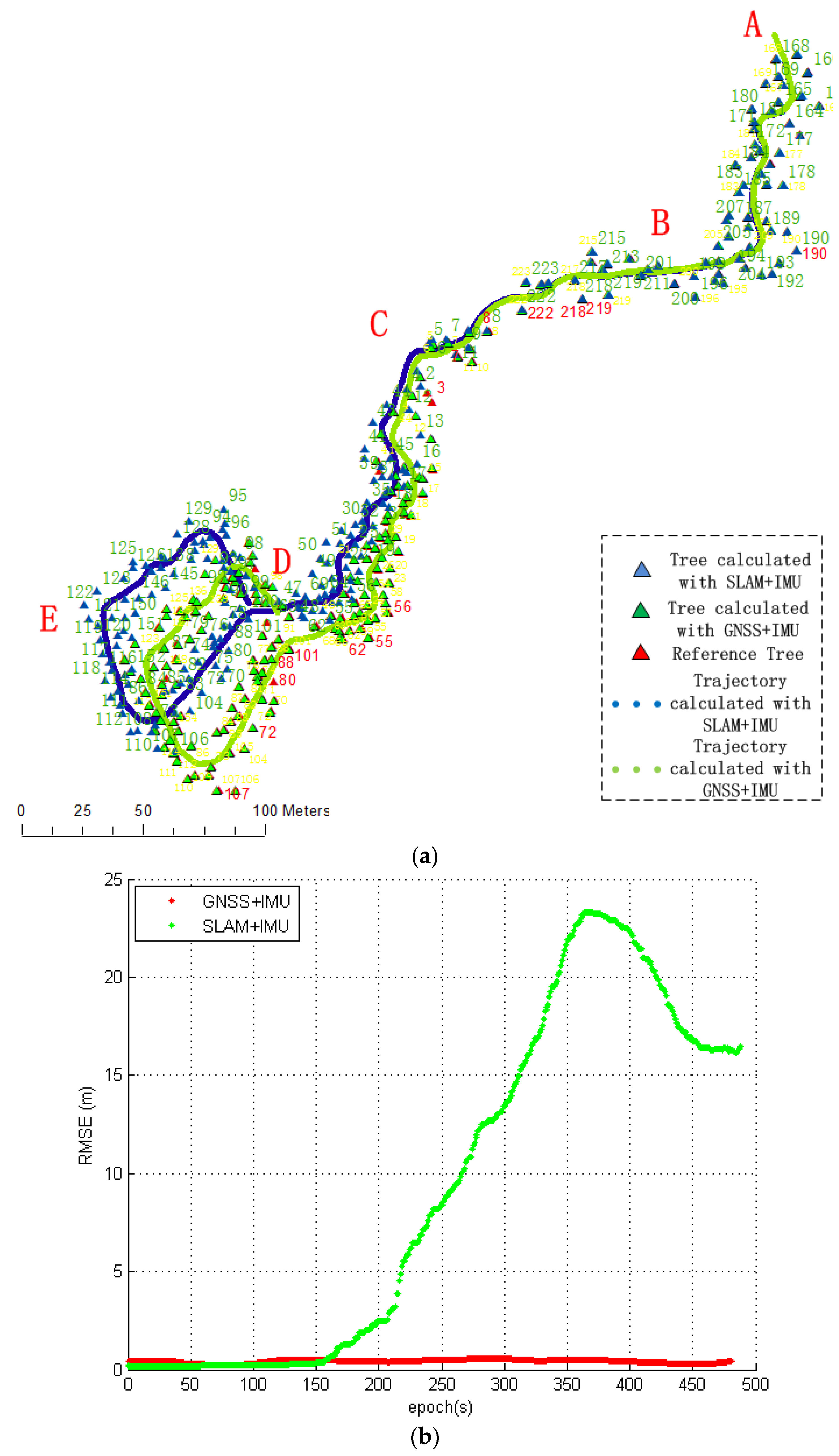
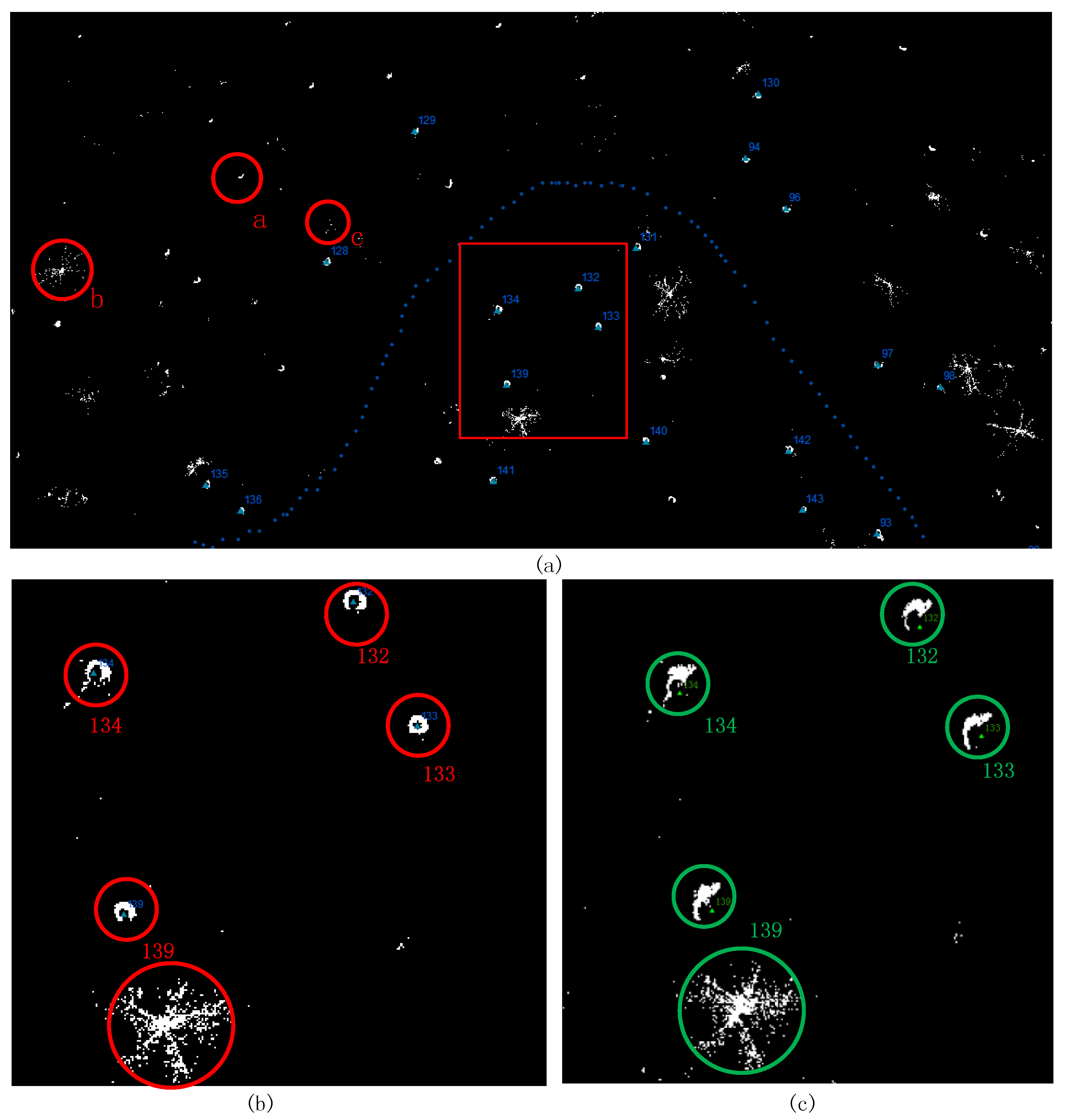
4.5. Evaluation of the Tree Stem Distribution Map
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bienert, A.; Scheller, S.; Keane, E.; Mohan, F.; Nugent, C. Tree detection and diameter estimations by analysis of forest terrestrial laser scanner point clouds. In ISPRS Workshop on Laser Scanning; IAPRS: Espoo, Finland, 2007; Volume 2007, pp. 50–55. [Google Scholar]
- Brolly, G.; Kiraly, G. Algorithms for stem mapping by means of terrestrial laser scanning. Acta Silv. Lignaria Hung. 2009, 5, 119–130. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform mobile laser scanning: Usability and performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Alho, P. Tree mapping using airborne, terrestrial and mobile laser scanning–A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Roßmann, J.; Krahwinkler, P.; Schlette, C. Navigation of mobile robots in natural environments: Using sensor fusion in forestry. J. Syst. Cybern. Inform. 2010, 8, 67–71. [Google Scholar]
- Bilker, M.; Kaartinen, H. The quality of real-time Kinematic (RTK) GPS positioning. Rep. Finn. Geod. Inst. 2001, 1, 1–25. [Google Scholar]
- Fuke, Y.; Krotkov, E. Dead reckoning for a lunar rover on uneven terrain. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 1, pp. 411–416.
- Ringdahl, O.; Hohnloser, P.; Hellström, T.; Holmgren, J.; Lindroos, O. Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner. Remote Sens. 2013, 5, 4839–4856. [Google Scholar] [CrossRef]
- Takashi, T.; Asano, A.; Mochizuki, T.; Kondou, S.; Shiozawa, K.; Matsumoto, M.; Tomimura, S.; Nakanishi, S.; Mochizuki, A.; Chiba, Y.; et al. Forest 3D Mapping and Tree Sizes Measurement for Forest Management Based on Sensing Technology for Mobile Robots. In Field and Service Robotics; Springer: Berlin, Germany; Heidelberg, Germany, 2014. [Google Scholar]
- Ding, X.; Yan, L.; Liu, J.; Kong, J.; Yu, Z. Obstacles Detection Algorithm in Forest based on Multi-sensor Data Fusion. J. Multimed. 2013, 8, 790–795. [Google Scholar] [CrossRef]
- Öhman, M.; Miettinen, M.; Kannas, K.; Jutila, J.; Visala, A.; Forsman, P. Tree measurement and simultaneous localization and mapping system for forest harvesters. In Field and Service Robotics; Springer: Berlin, Germany; Heidelberg, Germany, 2008; pp. 369–378. [Google Scholar]
- Miettinen, M.; Ohman, M.; Visala, A.; Forsman, P. Simultaneous Localization and Mapping for Forest Harvesters. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 517–522.
- Chen, Y.; Tang, J.; Hyyppä, J.; Holopainen, M.; Liang, X.; Liu, J.; Chen, L.; Hakala, T.; Litkey, P.; Niu, X.; et al. Automated Stem Mapping Using SLAM Technology for Plot-Wise Forest Inventory. In Proceedings of Ubiquitous Positioning Indoor Navigation and Location-Based Services (UPINLBS 2014), Corpus Christi, TX, USA, 20–21 Novenber 2014; pp. 130–134.
- Liang, X. Feasibility of Terrestrial Laser Scanning for Plotwise Forest Inventories. Ph.D. Thesis, Publication of the Finnish Geodetic Institute, Masala, Finland, 2013. [Google Scholar]
- Liang, X.; Litkey, P.; Hyyppä, J.; Kaartinen, H.; Kukko, A.; Holopainen, M. Automatic plot-wise tree location mapping using single-scan terrestrial laser scanning. Photogramm. J. Finl. 2011, 22, 37–48. [Google Scholar]
- Jutila, J.; Kannas, K.; Visala, A. Tree measurement in forest by 2D laser scanning. In Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–23 June 2007; pp. 491–496.
- Tang, J.; Chen, Y.; Chen, L.; Liu, J.; Hyyppä, J.; Kukko, A.; Chen, R. Fast Fingerprint Database Maintenance for Indoor Positioning Based on UGV SLAM. Sensors 2015, 15, 5311–5330. [Google Scholar] [CrossRef] [PubMed]
- Kaartinen, H.; Hyyppä, J.; Kukko, A.; Jaakkola, A.; Hyyppä, H. Benchmarking the performance of mobile laser scanning systems using a permanent test field. Sensors 2012, 12, 12814–12835. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppa, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The use of a mobile laser scanning system for mapping large forest plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Robotics-DL Tentative, International Society for Optics and Photonics, Boston, MA, USA, 30 April 1992; pp. 586–606.
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 18–23 May 2008; pp. 19–25.
- Steux, B.; el Hamzaoui, O. TinySLAM: A SLAM algorithm in less than 200 lines C-language program. In Proceedings of the Control Automation Robotics & Vision (ICARCV), Singapore, 7–10 December 2010; pp. 1975–1979.
- Olson, E.B. Real-time correlative scan matching. In Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 4387–4393.
- Tang, J.; Chen, Y.; Jaakkola, A.; Liu, J.; Hyyppä, J.; Hyyppä, H. NAVIS-An UGV Indoor Positioning System Using Laser Scan Matching for Large-Area Real-Time Applications. Sensors 2014, 14, 11805–11824. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Chen, Y.; Niu, X.; Wang, L.; Chen, L.; Liu, J.; Shi, C.; Hyyppä, J. LiDAR Scan Matching aided Inertial Navigation System in GPS Denied Environments. Sensors 2015, 15, 16710–16728. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR. Forests 2015, 6, 4588-4606. https://doi.org/10.3390/f6124390
Tang J, Chen Y, Kukko A, Kaartinen H, Jaakkola A, Khoramshahi E, Hakala T, Hyyppä J, Holopainen M, Hyyppä H. SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR. Forests. 2015; 6(12):4588-4606. https://doi.org/10.3390/f6124390
Chicago/Turabian StyleTang, Jian, Yuwei Chen, Antero Kukko, Harri Kaartinen, Anttoni Jaakkola, Ehsan Khoramshahi, Teemu Hakala, Juha Hyyppä, Markus Holopainen, and Hannu Hyyppä. 2015. "SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR" Forests 6, no. 12: 4588-4606. https://doi.org/10.3390/f6124390