Outlook for the Next Generation’s Precision Forestry in Finland

Abstract
:1. Introduction
1.1. Background
1.2. Towards Precision Forestry
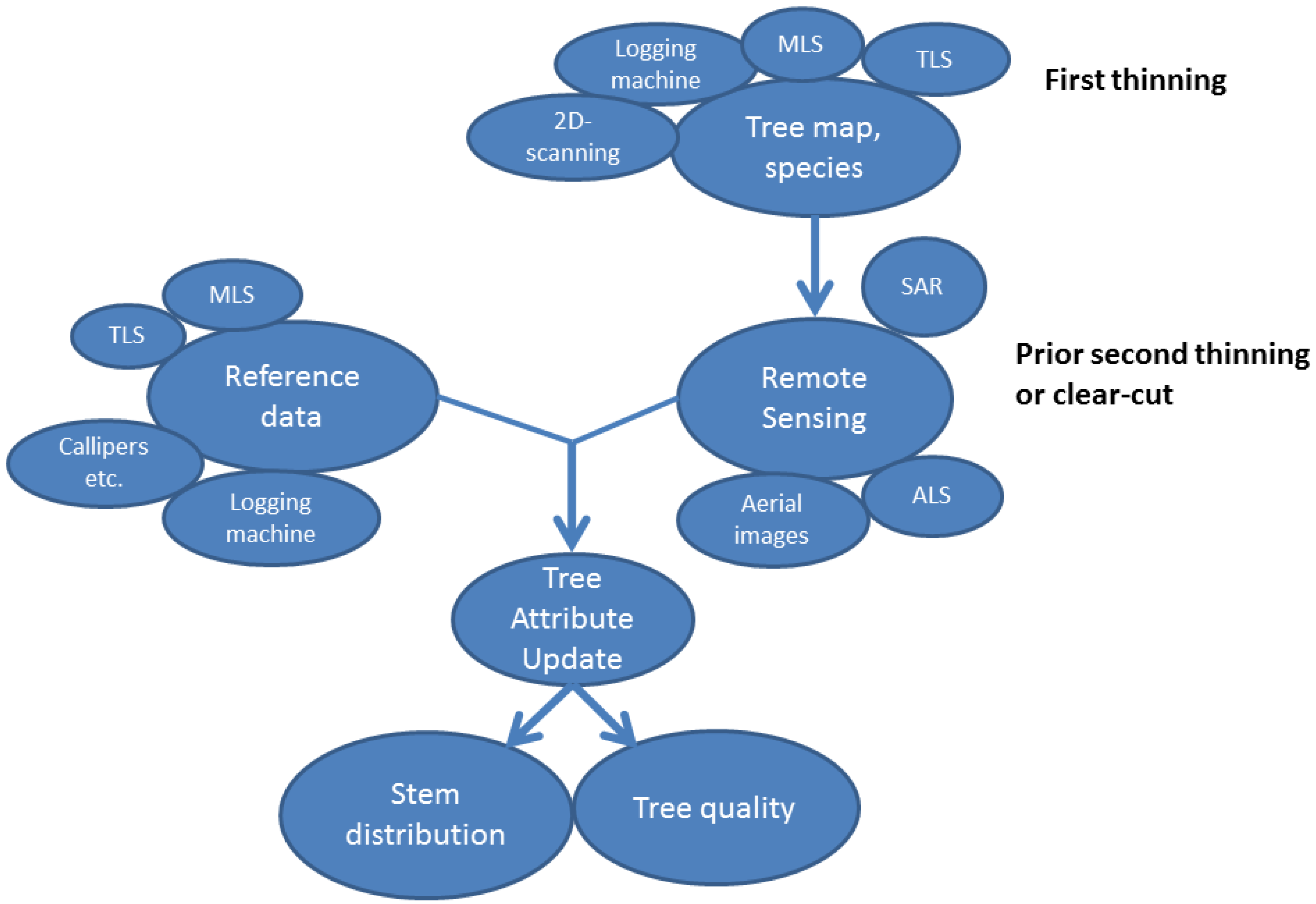
2. Precision Forestry by Means of Multisource 3D Information

{kind=link}
{kind=link}
{kind=link}
| Data requirements for forest inventory | Stand development stage | ||
|---|---|---|---|
| Seedling stands | Thinning stand | After the final thinning/mature stands | |
| Level of the required detail | Grid | Grid | Single tree |
| Ground truth | UAV | MLS, ground plots | Logging machine, MLS |
| DTM | ALS-based | ALS-based | ALS-based |
| Remote sensing data | ALS, stereo imagery | ALS, stereo imagery | ALS, stereo imagery |
3. Precision Forestry Data Acquisition Techniques
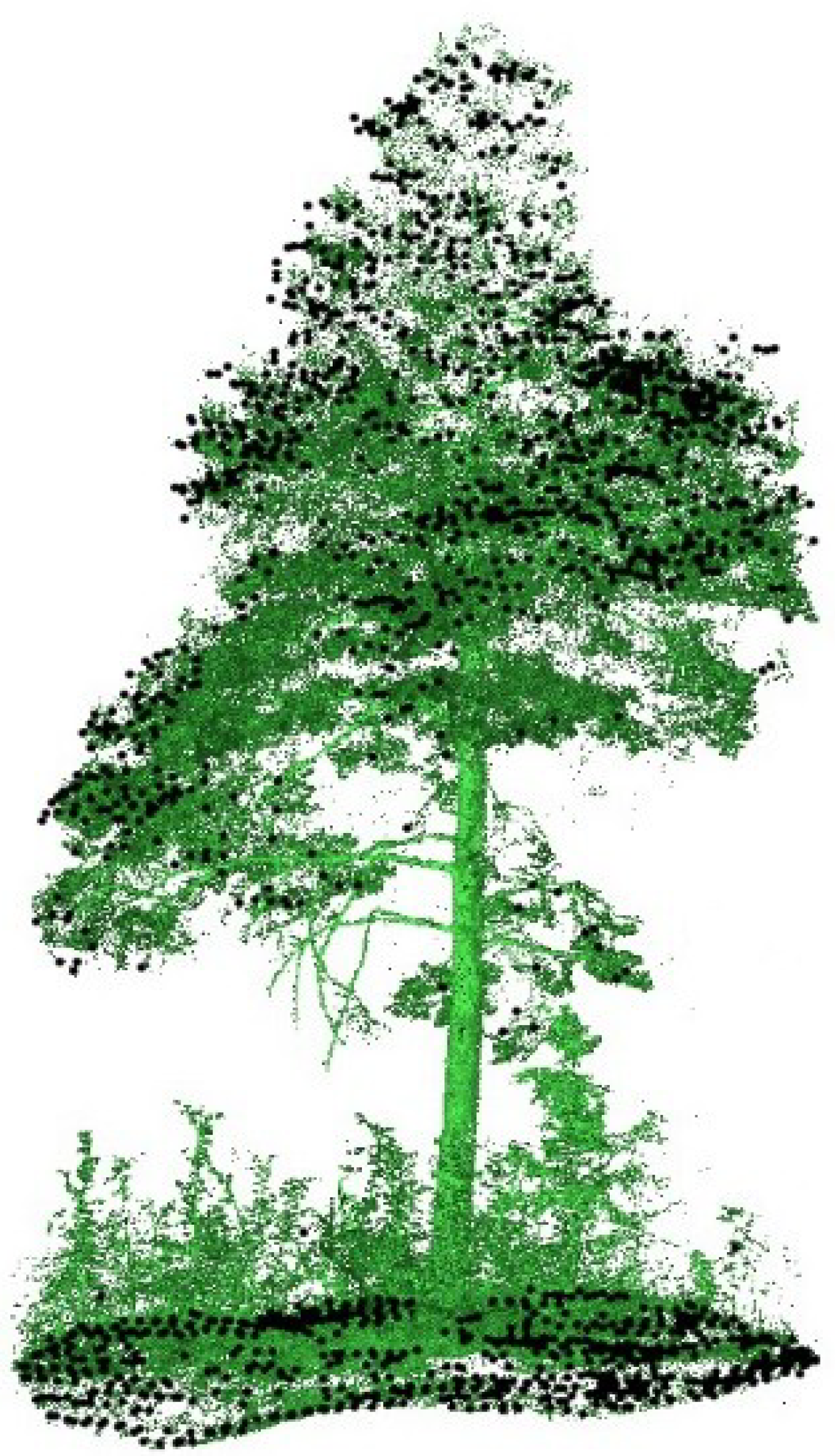
3.1. Terrestrial and Mobile Laser Scanning
3.2. Airborne and Space-Borne Point Clouds
3.3. Collecting Forest Resource Information Using Logging Machines
4. Added Values for Wood Procurement from Detailed Information
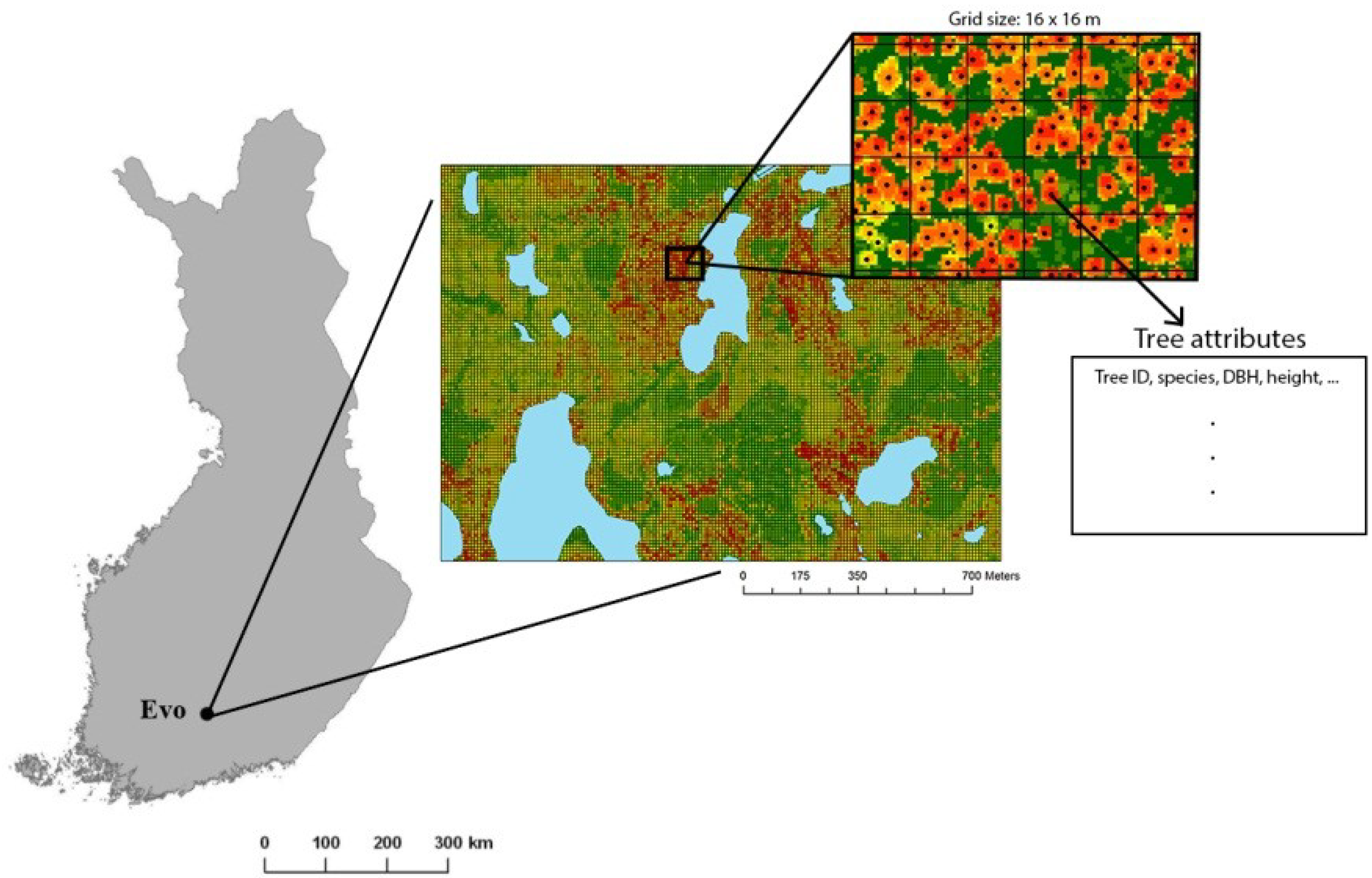
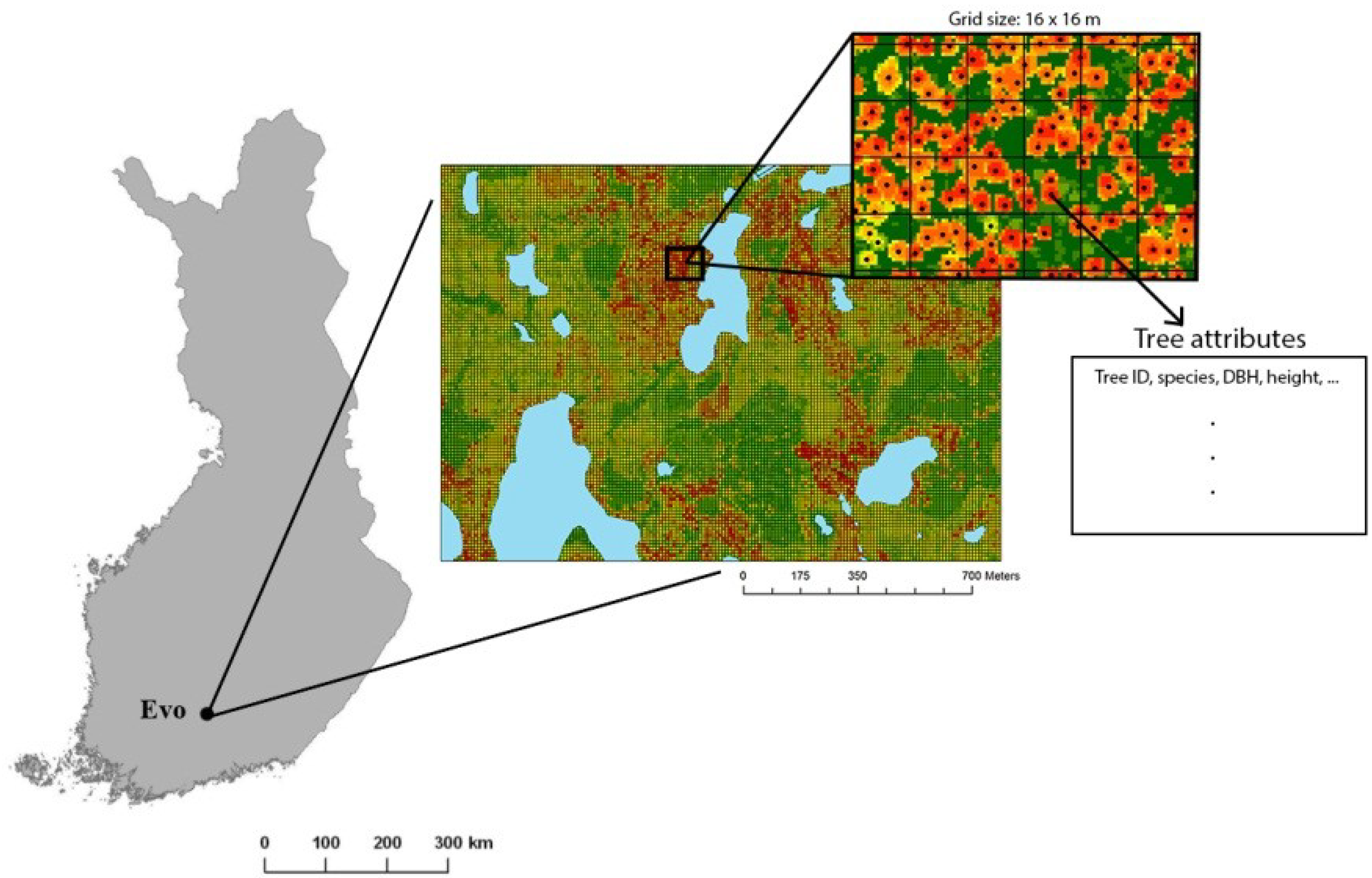
4.1. Forest Resource Information at the Grid Level
4.2. Tree Maps with Attribute Information
4.3. Harvesting Planning
4.4. Information Update
4.4.1. Updating Forest Resource Information at the Grid Level
4.4.2. Updating Tree Maps with Attribute Information
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References and Notes
- Næsset, E. Predicting Forest Stand Characteristics with Airborne Scanning Laser Using a Practical Two-Stage Procedure and Field Data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Varhola, A.; Vastaranta, M.; Coops, N.C.; Cook, B.D.; Pitt, D.; Woods, M. A Best Practices Guide for Generating Forest Inventory Attributes from Airborne Laser Scanning Data Using an Area-Based Approach. For. Chron. 2013, 89, 722–723. [Google Scholar] [CrossRef]
- Vastaranta, M. Forest Mapping and Monitoring Using Active 3D Remote Sensing. Diss. For. 2012, 144, 45. [Google Scholar]
- Wulder, M.; Coops, N.; Hudak, A.; Morsdorf, F.; Nelson, R.; Newnham, G.; Vastaranta, M. Status and Prospects for LiDAR Remote Sensing of Forested Ecosystems. Can. J. Remote Sens. 2013, 39, S1–S5. [Google Scholar] [CrossRef]
- Holopainen, M.; Vastaranta, M.; Rasinmäki, J.; Kalliovirta, J.; Mäkinen, A.; Haapanen, R.; Melkas, T.; Yu, X.; Hyyppä, J. Uncertainty in Timber Assortment Estimates Predicted from Forest Inventory Data. Eur. J. For. Res. 2010, 129, 1131–1142. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser Scanning of Forest Resources: The Nordic Experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. LiDAR Sampling for Large-Area Forest Characterization: A Review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Holmgren, J.; Barth, A.; Larsson, H.; Olsson, H. Prediction of Stem Attributes by Combining Airborne Laser Scanning and Measurements from Harvesters. Silva Fenn. 2012, 46, 227–239. [Google Scholar]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M. Comparative Testing of Single-Tree Detection Algorithms under Different Types of Forest. Forestry 2012, 85, 27–40. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Packalen, P.; Malinen, J.; Pitkänen, J.; Maltamo, M. Airborne Laser Scanning Based Decision Support for Wood Procurement Planning. Scand. J. For. Res. 2013, 28. [Google Scholar] [CrossRef]
- Saarinen, N.; Vastaranta, M.; Kankare, V.; Tanhuanpää, T.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Urban-Tree-Attribute Update Using Multisource Single-Tree Inventory. Forests 2014, 5, 1032–1052. [Google Scholar] [CrossRef]
- Vastaranta, M.; Saarinen, N.; Kankare, V.; Holopainen, M.; Kaartinen, H.; Hyyppä, J.; Hyyppä, H. Multisource Single-Tree Inventory in the Prediction of Tree Quality Variables and Logging Recoveries. Remote Sens. 2014, 6, 3475–3491. [Google Scholar] [CrossRef]
- Hyyppä, J.; Inkinen, M. Detecting and Estimating Attributes for Single Trees Using Laser Scanner. Photogramm. J. Finl. 1999, 16, 27–42. [Google Scholar]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J. Advances in Forest Inventory Using Airborne Laser Scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppa, J.; Yu, X.W.; Vastaranta, M.; Hyyppa, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; Naesset, E.; Pitkanen, J.; Popescu, S.; Solberg, S.; Wolf, B.M.; Wu, J.C. An International Comparison of Individual Tree Detection and Extraction Using Airborne Laser Scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Melkas, T.; Miettinen, M.; Hämäläinen, J.; Einola, K. Puukarttajärjestelmä hakkuun tehostamisessa. Available online: http://www.metsateho.fi/files/metsateho/Tuloskalvosarja/Tuloskalvosarja_2014_01_Puukarttajarjestelma_hakkuun_tehostamisessa_tm_ym.pdf (accesed on 2 April 2014).
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne Laser Scanning and Digital Stereo Imagery Measures of Forest Structure: Comparative Results and Implications to Forest Mapping and Inventory Update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar]
- White, J.; Wulder, M.; Vastaranta, M.; Coops, N.; Pitt, D.; Woods, M. The Utility of Image-Based Point Clouds for Forest Inventory: A Comparison with Airborne Laser Scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Karjalainen, M.; Kankare, V.; Vastaranta, M.; Holopainen, M.; Hyyppa, J. Prediction of Plot-Level Forest Variables Using TerraSAR-X Stereo SAR Data. Remote Sens. Environ. 2012, 117, 338–347. [Google Scholar] [CrossRef]
- Perko, R.; Raggam, H.; Deutscher, J.; Gutjahr, K.; Schardt, M. Forest Assessment Using High Resolution SAR Data in X-Band. Remote Sens. 2011, 3, 792–815. [Google Scholar] [CrossRef]
- Rasinmäki, J.; Melkas, T. A Method for Estimating Tree Composition and Volume Using Harvester Data. Scand. J. For. Res. 2005, 20, 85–95. [Google Scholar] [CrossRef]
- Miettinen, M.; Ohman, M.; Visala, A.; Forsman, P. Simultaneous Localization and Mapping for Forest Harvesters. In Proceedings of the IEEE International Conference, Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 517–522.
- Öhman, M.; Miettinen, M.; Kannas, K.; Jutila, J.; Visala, A.; Forsman, P. Tree Measurement and Simultaneous Localization and Mapping System for Forest Harvesters. In Field Service Robotics; Springer-Verlag Berlin Heidelberg: Berlin, Germany, 2008; pp. 369–378. [Google Scholar]
- Vastaranta, M.; Holopainen, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Viitala, R. Predicting Stand-Thinning Maturity from Airborne Laser Scanning Data. Scand. J. For. Res. 2011, 26, 187–196. [Google Scholar] [CrossRef]
- Liang, X.L.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic Stem Mapping Using Single-Scan Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Xinlian, L.; Kankare, V.; Xiaowei, Y.; Hyyppa, J.; Holopainen, M. Automated Stem Curve Measurement Using Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef]
- Lindeman, H.; Ala-Ilomäki, J.; Sirén, M.; Vastaranta, M.; Holopainen, M.; Uusitalo, J. Turvemaan Kantavuuden Ennustaminen Laserkeilausaineistoilla; Working Papers of the Finnish Forest Research Institute; Metla: Helsinki, Finland, 2013; p. 31. [Google Scholar]
- Yu, X.; Hyyppä, J.; Kaartinen, H.; Maltamo, M. Automatic Detection of Harvested Trees and Determination of Forest Growth Using Airborne Laser Scanning. Remote Sens. Environ. 2004, 90, 451–462. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests 2014, 5, 1682-1694. https://doi.org/10.3390/f5071682
Holopainen M, Vastaranta M, Hyyppä J. Outlook for the Next Generation’s Precision Forestry in Finland. Forests. 2014; 5(7):1682-1694. https://doi.org/10.3390/f5071682
Chicago/Turabian StyleHolopainen, Markus, Mikko Vastaranta, and Juha Hyyppä. 2014. "Outlook for the Next Generation’s Precision Forestry in Finland" Forests 5, no. 7: 1682-1694. https://doi.org/10.3390/f5071682