Estimating Soil Displacement from Timber Extraction Trails in Steep Terrain: Application of an Unmanned Aircraft for 3D Modelling

Abstract
:
1. Introduction

2. Materials and Methods
2.1. Study Site
2.2. Data Acquisition

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacture and Model | Sony NEX-5N |
|---|---|
| Focal length, mm | 16 (~24 on SLR) |
| Sensor size, mm | 23.5 × 15.6 |
| Resolution, pixels | 4912 × 3264 (3:2) |
2.3. Data Processing
2.4. Calculation of Soil Displacement
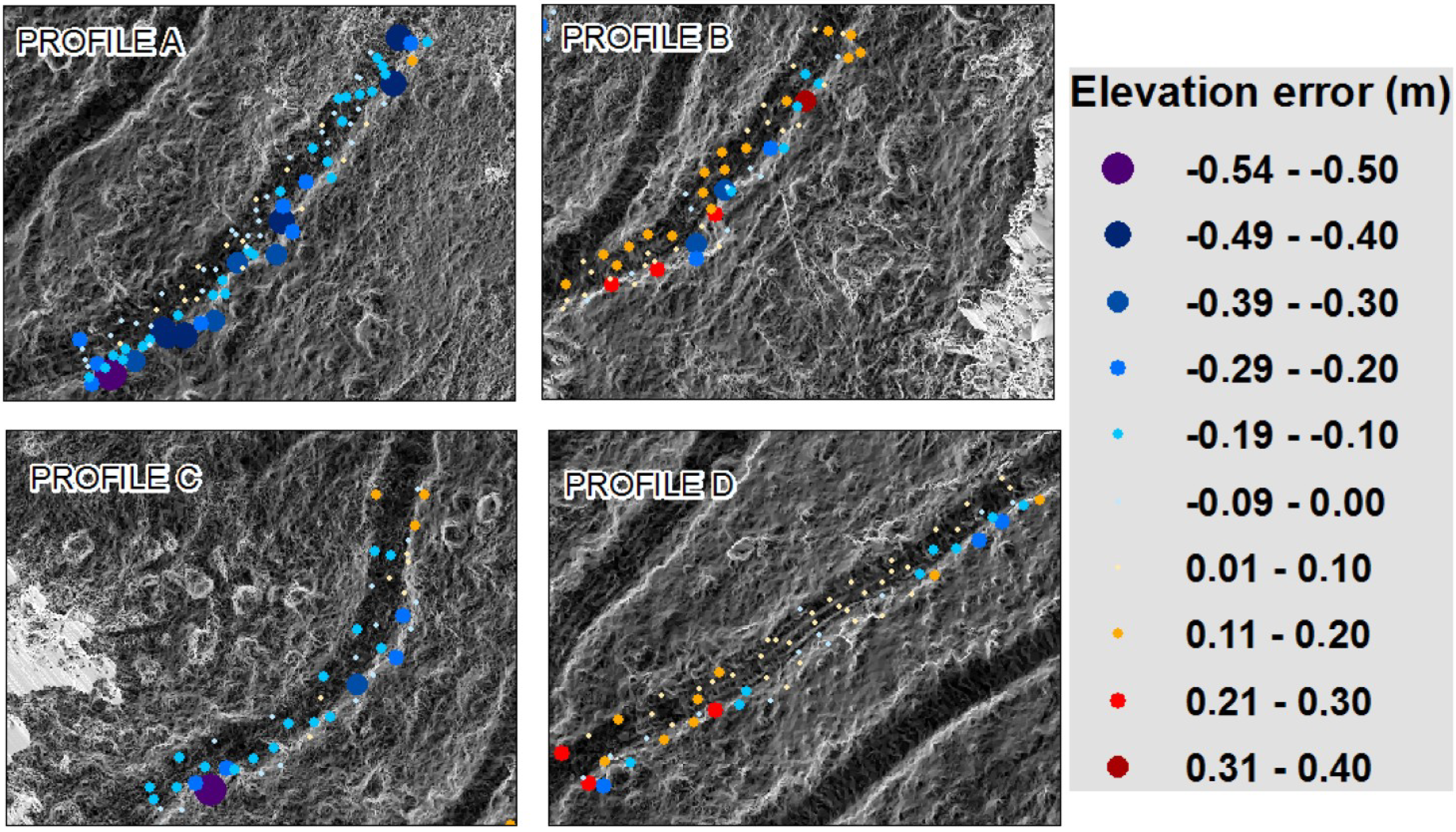
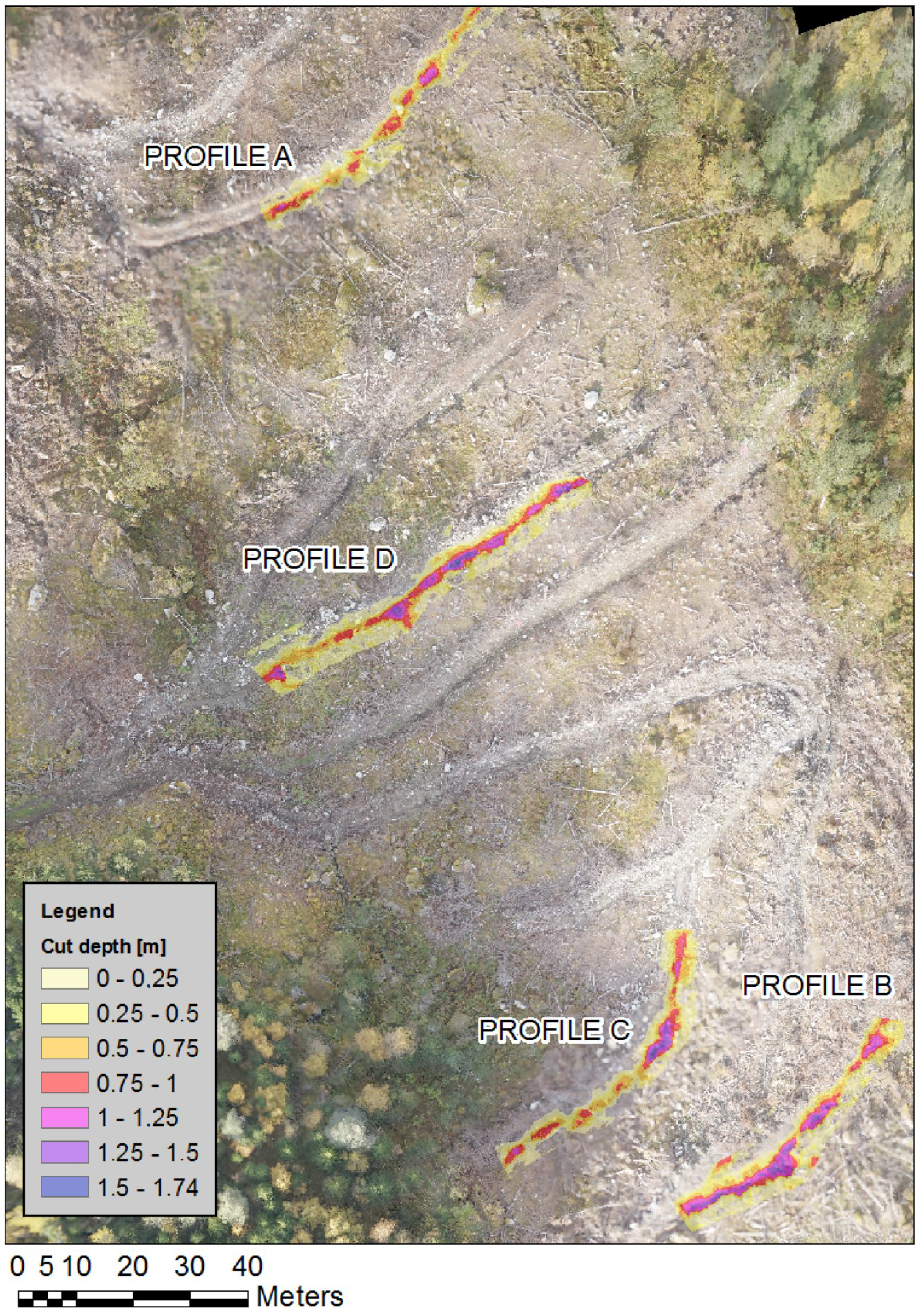
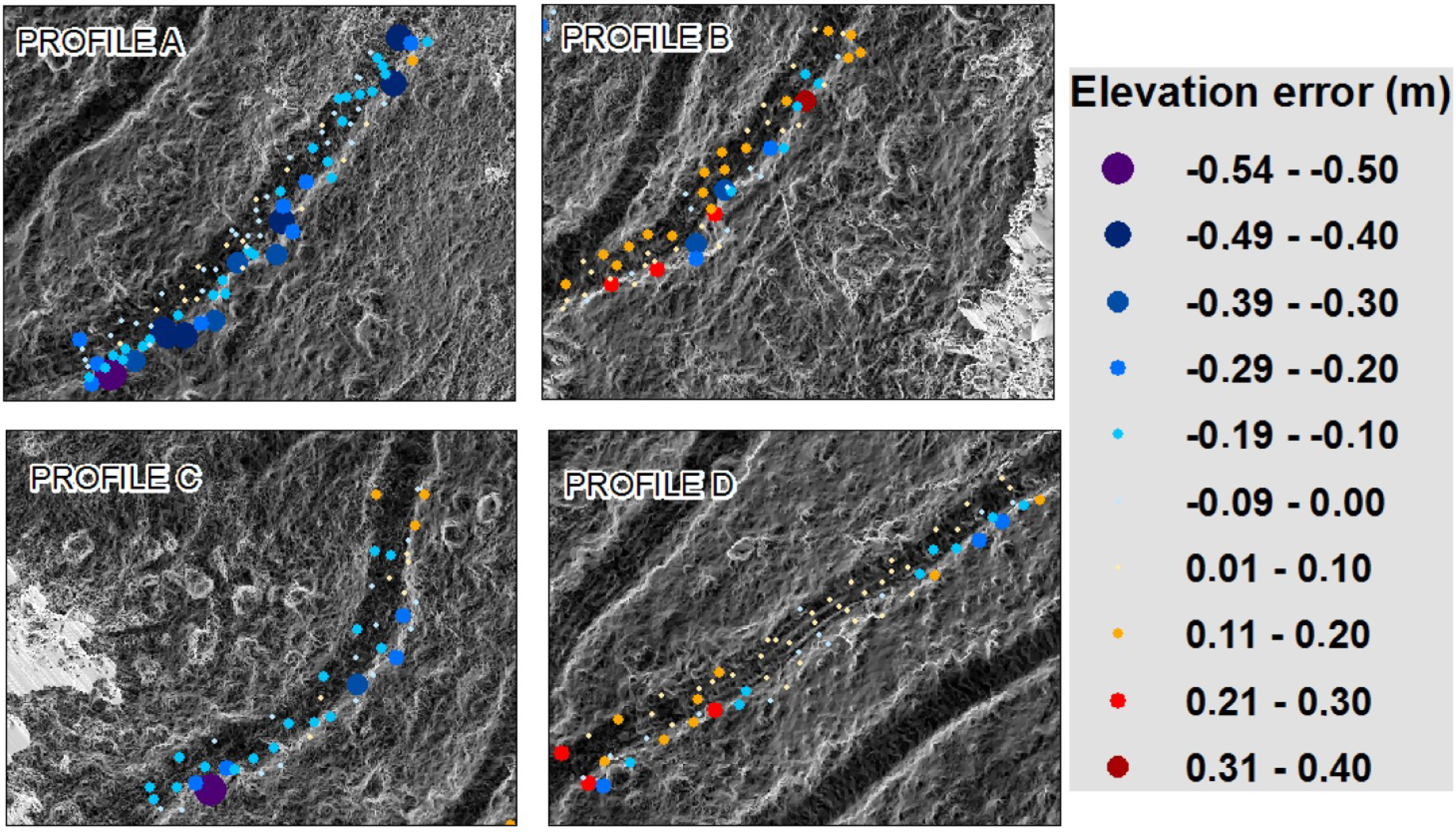
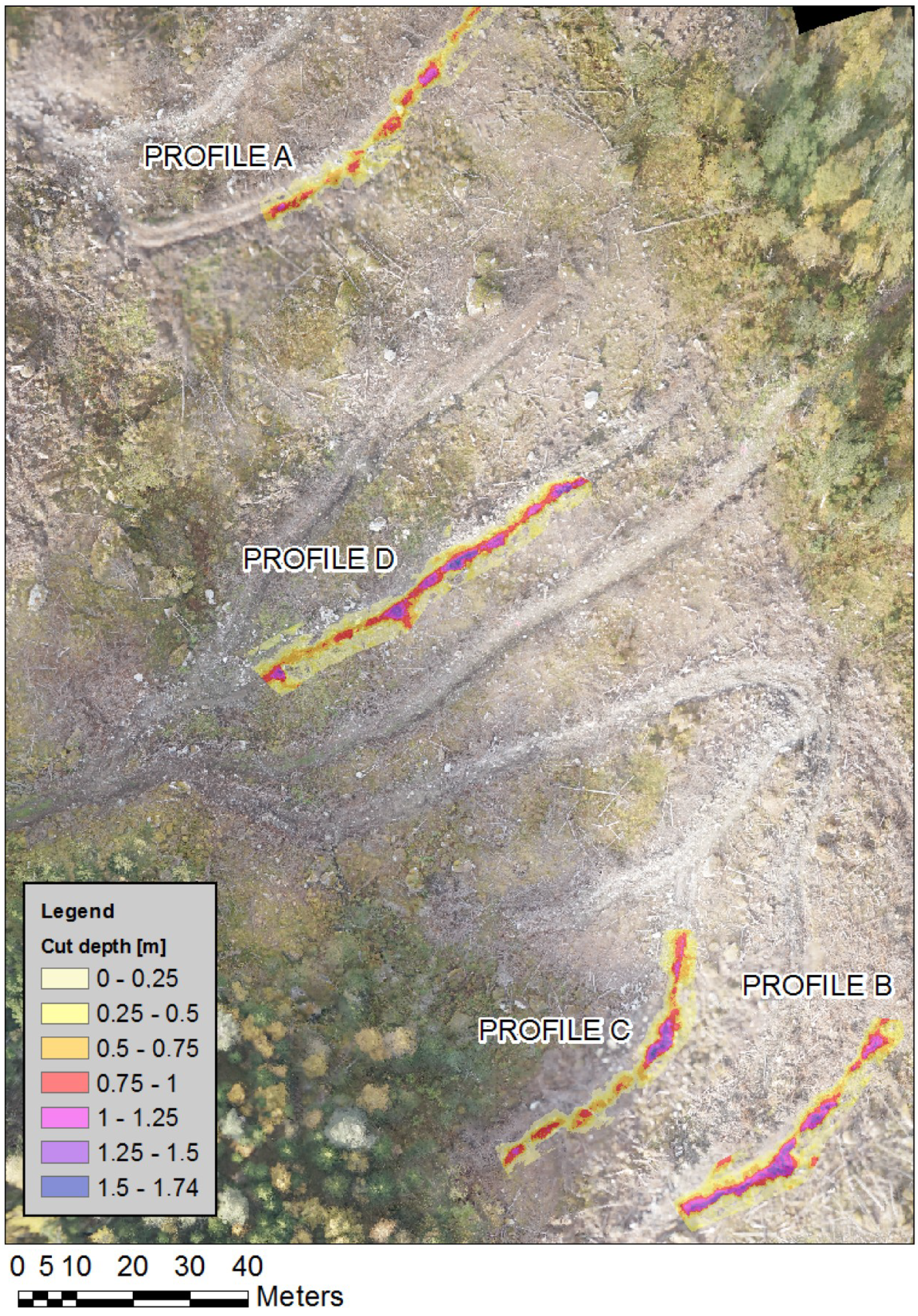
3. Results
| Profile A | Profile B | Profile C | Profile D | |
|---|---|---|---|---|
| Reference point count/(subsampled) | 93/69 | 62/44 | 48/31 | 67/48 |
| Segment length, m | 55 | 45 | 50 | 60 |
| Reference point Elevation error, m | −0.09 | 0.03 | −0.11 | 0.03 |
| Standard deviation of elevation error, m | 0.11 | 0.12 | 0.1 | 0.08 |
| Min/Max DGPS elevation error, m | −0.49/0.05 | −0.34/0.22 | −0.37/0.12 | −0.19/0.22 |
| Cut volume, m3 | 94.43 | 166.48 | 117.2 | 176.34 |
| Cut volume, m3·m−1 | 1.72 | 3.7 | 2.34 | 2.94 |
| Side slope, % | 45.3 | 56.8 | 47.9 | 49.0 |
| Trail segment inclination, % | 3.9 | 5.4 | 0.5 | 9.6 |
| Profile A | Profile B | Profile C | Profile D | |
|---|---|---|---|---|
| Recalculated cut volume, m3 | 73.36 | 175.92 | 90.06 | 186.22 |
| Recalculated cut volume, m3·m−1 | 1.33 | 3.9 | 1.8 | 3.1 |
| Percent change | 22% | −6% | 23% | −6% |
| Percent change per 1cm elev. | 2.28% | 1.93% | 2.01% | 2.17% |
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Megahan, W.F.; Kidd, W.J. Effects of Logging and Logging Roads on Erosion and Sediment Deposition from Steep Terrain. J. For. 1972, 70, 136–141. [Google Scholar]
- Smidt, M.F.; Kolka, R.K. Alternative Skid Trail Retirement Options for Steep Terrain Logging. In Appalachian Hardwoods: Managing Change, Proceedings of the 24th Annual Meeting of the Council of Forest Engineering (COFE), Snowshoe, WV, USA, 15–19 July 2001; Wang, J., Wolford, M., McNeel, J.F., Eds.; USDA Forest Service: Snowshoe, WV, USA, 2001; p. 6. [Google Scholar]
- Christopher, E.A.; Visser, R. Methodology for Evaluating Post Harvest Erosion Risk for the Protection of Water Quality. N. Z. J. For. 2007, 52, 20–25. [Google Scholar]
- Sawyers, B.C.; Bolding, M.C.; Aust, W.M.; Lakel, W.A. Effectiveness and Implementation Costs of Overland Skid Trail Closure Techniques in the Virginia Piedmont. J. Soil Water Conserv. 2012, 67, 300–310. [Google Scholar]
- Worrell, W.C.; Bolding, M.C.; Aust, W.M. Potential Soil Erosion Following Skyline Yarding Versus Tracked Skidding on Bladed Skid Trails on the Appalachian Region of Virginia. South. J. Appl. For. 2011, 35, 131–135. [Google Scholar]
- Kanzaki, K.; Ohasi, K.; Deki, T.; Miyake, T. On Capillary Path Systems in Steep Mountain Areas. Int. J. For. Eng. 1990, 2, 17–21. [Google Scholar]
- Pinard, M.A.; Barker, M.G.; Tay, J. Soil Disturbance and Post-Logging Forest Recovery on Bulldozer Paths in Sabah, Malaysia. For. Ecol. Manag. 2000, 130, 213–225. [Google Scholar] [CrossRef]
- Sidle, R.C.; Sasaki, S.; Otsuki, M.; Noguchi, S.; Rahim Nik, A. Sediment Pathways in a Tropical Forest: Effects of Logging Roads and Skid Trails. Hydrol. Process. 2004, 18, 703–720. [Google Scholar]
- Webb, A.A.; Dragovich, D.; Jamshidi, R. Temporary Increases in Suspended Sediment Yields Following Selective Eucalypt Forest Harvesting. For. Ecol. Manag. 2012, 283, 96–105. [Google Scholar] [CrossRef]
- Davies, P.E.; Nelson, M. The Effect of Steep Slope Logging on Fine Sediment Infiltration into the Beds of Ephemeral and Perennial Streams of the Dazzler Range, Tasmania, Australia. J. Hydrol. 1993, 150, 481–504. [Google Scholar] [CrossRef]
- Cornish, P.M. The Effects of Roading, Harvesting and Forest Regeneration on Streamwater Turbidity Levels in a Moist Eucalypt Forest. For. Ecol. Manag. 2001, 152, 293–312. [Google Scholar] [CrossRef]
- Granhus, A.; Hylen, G.; Nilsen, J.-E. Skogen i Norge: Statistikk over Skogforhold og Skogressurser i Norge Registrert i Perioden 2005–2009. In Statistics of Forest Conditions and Resources in Norway; Norwegian Forest and Landscape Institute: Ås, Norway, 2012; p. 85. [Google Scholar]
- Lileng, J. Avvirkning med Hjulgående Maskiner i Bratt Terreng. In Harvesting with Ground Based Systems in Steep Terrain; Norwegian Forest and Landscape Institute: Ås, Norway, 2009; pp. 1–7. [Google Scholar]
- Torgersen, H.; Lisland, T. Excavator-Based Cable Logging and Processing System: A Norwegian Case Study. Int. J. For. Eng. 2002, 13, 11–16. [Google Scholar]
- McIver, J.D.; McNeil, R. Soil Disturbance and Hill-Slope Sediment Transport after Logging of a Severely Burned Site in Northeastern Oregon. West. J. Appl. For. 2006, 21, 123–133. [Google Scholar]
- Wang, J.; Edwards, P.J.; Wood, F. Turbidity and Suspended-Sediment Changes from Stream-Crossing Construction on a Forest Haul Road in West Virginia, USA. Int. J. For. Eng. 2013, 24, 76–90. [Google Scholar]
- Aruga, K.; Sessions, J.; Miyata, E.S. Forest Road Design with Soil Sediment Evaluation Using a High-Resolution Dem. J. For. Res. 2005, 10, 471–479. [Google Scholar] [CrossRef]
- Contreras, M.; Aracena, P.; Chung, W. Improving Accuracy in Earthwork Volume Estimation for Proposed Forest Roads Using a High-Resolution Digital Elevation Model. Croat. J. For. Eng. 2012, 33, 125–142. [Google Scholar]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using Lidar Data to Map Gullies and Headwater Streams under Forest Canopy: South Carolina, USA. CATENA 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of Gully Erosion Estimates Using Airborne and Ground-Based Lidar on Santa Cruz Island, California. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure From Motion (SFM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Lingua, A.; Marenchino, D.; Nex, F. Performance Analysis of the Sift Operator for Automatic Feature Extraction and Matching in Photogrammetric Applications. Sensors 2009, 9, 3745–3766. [Google Scholar] [CrossRef]
- Rossi, A.J.; Rhody, H.; Salvaggio, C.; Walvoord, D.J. Abstracted Workflow Framework with a Structure from Motion Application. In Proceedings of Image Processing Workshop (WNYIPW), New York, NY, USA, 9 November 2012; pp. 9–12.
- Lowe, D. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo Tourism: Exploring Photo Collections in 3D. ACM Trans. Graphics 2006, 25, 835–846. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote Sensing of Vegetation Structure Using Computer Vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef]
- Flight Time of Mikrokopters. Available online: http://www.mikrokopter.de/ucwiki/en/FlightTime#MikroKopter_as_Okto_.2BAC8_Okto2 (accessed on 9 April 2014).
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. Geosci. Remote Sens. IEEE Trans. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking Computer Vision Aloft—Archaeological Three-Dimensional Reconstructions from Aerial Photographs with Photoscan. Archaeol. Prospec. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Bouguet, J.-Y. Camera calibration toolbox for matlab. 2004. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 30 January 2014).
- Agisoft Online Help for Agisoft Photoscan Professional. Available online: http://www.agisoft.ru/tutorials/photoscan (accessed on 8 April 2014).
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Pierzchała, M.; Talbot, B.; Astrup, R. Estimating Soil Displacement from Timber Extraction Trails in Steep Terrain: Application of an Unmanned Aircraft for 3D Modelling. Forests 2014, 5, 1212-1223. https://doi.org/10.3390/f5061212
Pierzchała M, Talbot B, Astrup R. Estimating Soil Displacement from Timber Extraction Trails in Steep Terrain: Application of an Unmanned Aircraft for 3D Modelling. Forests. 2014; 5(6):1212-1223. https://doi.org/10.3390/f5061212
Chicago/Turabian StylePierzchała, Marek, Bruce Talbot, and Rasmus Astrup. 2014. "Estimating Soil Displacement from Timber Extraction Trails in Steep Terrain: Application of an Unmanned Aircraft for 3D Modelling" Forests 5, no. 6: 1212-1223. https://doi.org/10.3390/f5061212
APA StylePierzchała, M., Talbot, B., & Astrup, R. (2014). Estimating Soil Displacement from Timber Extraction Trails in Steep Terrain: Application of an Unmanned Aircraft for 3D Modelling. Forests, 5(6), 1212-1223. https://doi.org/10.3390/f5061212