Analyzing Potential Tree-Planting Sites and Tree Coverage in Mexico City Using Satellite Imagery

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Spatial Data
2.3. Identification of Potential Planting Sites
2.4. Classification Accuracy Assessment
3. Results
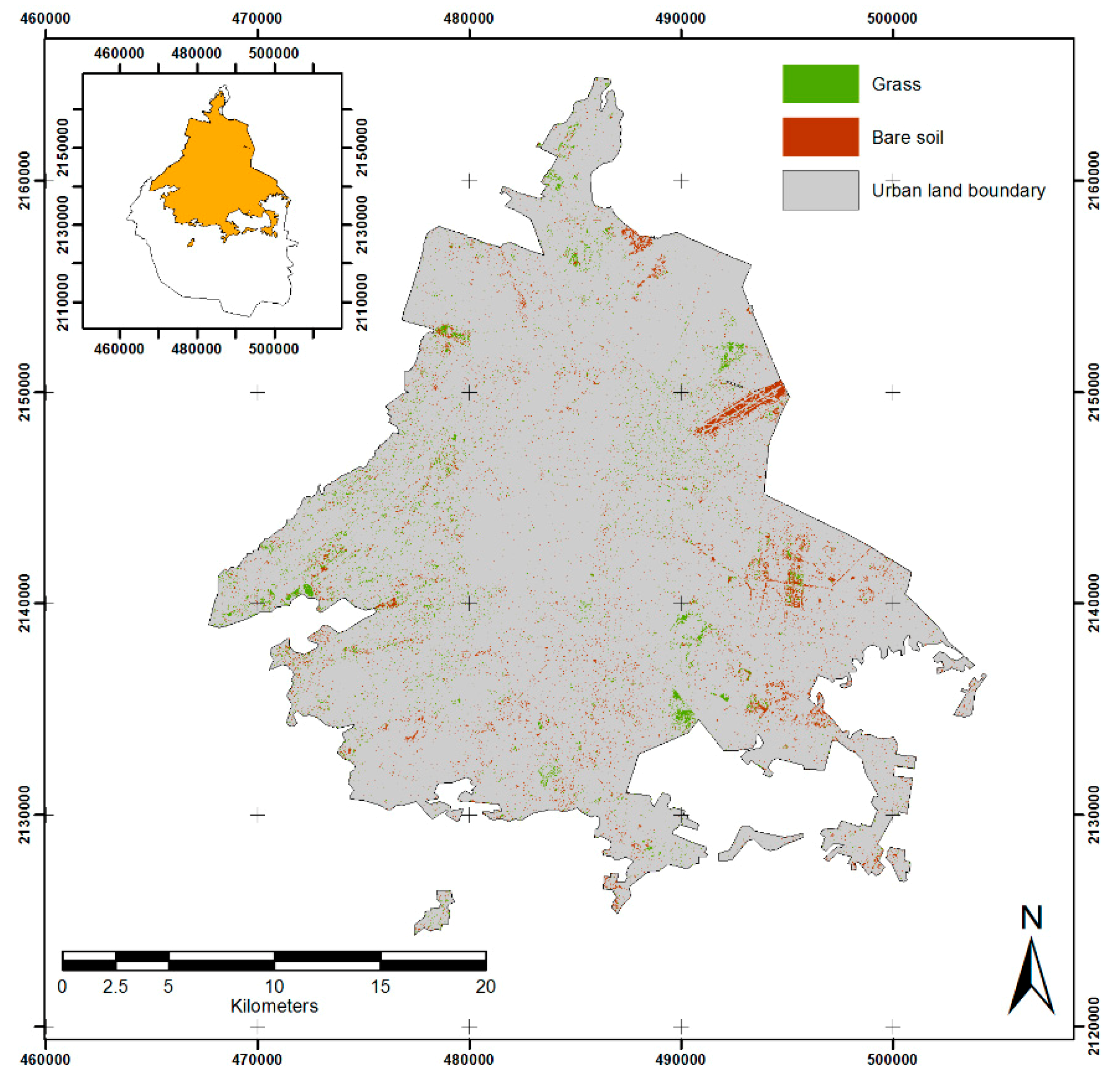
3.1. Location and Quantification of Potential Planting Sites
3.2. Existing Tree Canopy Cover
3.3. Total Green Area Surface vs. Impervious Surface
3.4. Potential Tree Canopy Cover, Technical and Market Potential
3.5. Classification Accuracy Assessment
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Simpson, J.R.; McPherson, E.G. Simulation of tree shade impacts on residential energy use for space conditioning in Sacramento. Atmos. Environ. 1997, 32, 69–74. [Google Scholar] [CrossRef]
- Xiao, Q.; McPherson, E.G. Rainfall interception by Santa Monica’s municipal urban forest. Urban Ecosyst. 2003, 6, 291–302. [Google Scholar] [CrossRef]
- Chiesura, A. The role of urban parks for the sustainable city. Landsc. Urban Plan. 2004, 68, 129–138. [Google Scholar] [CrossRef]
- Harris, W.R.; Clark, R.J.; Matheny, P.N. Arboriculture: Integrated Management of Landscape Trees, Shrubs, and Vines, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Hardin, P.J.; Jensen, R.R. The effect of urban leaf area on summertime urban surface kinetic temperatures. A Terre Haute case study. Urban For. Urban Green. 2007, 6, 63–72. [Google Scholar] [CrossRef]
- Escobedo, F.J.; Kroeger, T.; Wagner, J.E. Urban forests and pollution mitigation: Analyzing ecosystem services and disservices. Environ. Pollut. 2011, 159, 2078–2087. [Google Scholar] [CrossRef]
- Ulrich, R.S. Human responses to vegetation and landscapes. Landsc. Urban Plan. 1996, 13, 29–44. [Google Scholar] [CrossRef]
- Rosenfeld, A.H.; Akbari, H.; Romm, J.J.; Pomerantz, M. Cool communities: Strategies for heat island mitigation and smog reduction. Energy Build. 1998, 28, 51–62. [Google Scholar] [CrossRef]
- Spronken-Smith, R.; Oke, T. Scale modelling of nocturnal cooling in urban parks. Bound.-Lay. Meteorol. 1999, 93, 287–312. [Google Scholar] [CrossRef]
- McPherson, E.G.; Simpson, J.R. Potential energy savings in buildings by an urban tree planting programme in California. Urban For. Urban Green. 2003, 2, 73–86. [Google Scholar] [CrossRef]
- Rosenzweig, C.; Solecki, W.; Parshall, L.; Gaffin, S.; Lynn, B.; Goldberg, R.; Cox, J.; Hodges, S. Mitigating New York City’s heat island with urban forestry, living roofs, and light surfaces. Presented at the 86th American Meteorological Society Annual Meeting, Atlanta, GA, USA, 30 January–2 February 2006. [Google Scholar]
- Kenney, W.A.; Wassenaer, P.; Satel, A.L. Criteria and indicators ofr strategic urban forest planning and management. Arboric. Urban For. 2011, 37, 108–117. Available online: http://fufc.org/soap/kenney_criteria_and_indicators2011.pdf (accessed on 12 January 2017).
- Mcpherson, E.G.; Nowak, D.; Heisler, G.; Grimmond, S.; Souch, C.; Grant, R.; Rowantree, R. Quantifying urban forest structure, function, and value: The Chicago Urban Forest Climate Project. Urban Ecosyst. 1997, 1, 49–61. [Google Scholar] [CrossRef]
- Wang, S.C. An analysis of urban tree communities using Landsat Thematic Mapper data. Landsc. Urban Plan. 1988, 15, 11–22. [Google Scholar] [CrossRef]
- Akbari, H.; Rose, L.S.; Taha, H. Analyzing land cover of an urban environment using high-resolution orthophotos. Landsc. Urban Plan. 2003, 63, 1–14. [Google Scholar] [CrossRef]
- Lees, B.G.; Ritman, K. Decision-tree and rule-induction approach to integration of remotely sensed and GIS data in mapping vegetation in disturbed or hilly environments. Environ. Manag. 1991, 15, 823–831. [Google Scholar] [CrossRef]
- Xiao, Q.; Ustin, S.L.; McPherson, E.G. Using AVIRIS data and multiple-masking techniques to map urban forest tree species. Int. J. Remote Sens. 2004, 25, 5637–5654. [Google Scholar]
- Renaud, M.R.; Aryal, J.; Chong, A.K. Object-Based Classification of Ikonos Imagery for Mapping Large-Scale Vegetation Communities in Urban Areas. Sensors 2007, 7, 2860–2880. [Google Scholar]
- Pu, R.; Landry, S. A comparative analysis of high spatial resolution IKONOS and WorldView-2 imagery for mapping urban tree species. Remote Sens. Environ. 2012, 124, 516–533. [Google Scholar]
- Stow, D.; Coulter, L.; Kaiser, J.; Hope, A.; Service, D.; Schutte, K.; Walters, A. Irrigated Vegetation Assessment for Urban Environments. Photogramm. Eng. Remote Sens. 2003, 69, 381–390. [Google Scholar] [CrossRef]
- Walton, J.T.; Nowak, D.J.; Greenfield, E.J. Assessing urban forest canopy cover using airborne or satellite imagery. Arboric. Urban For. 2008, 34, 334–340. Available online: https://www.ncrs.fsfed.us/pubs/jrnl/2008/nrs_2008_walton_002.pdf (accessed on 24 February 2017).
- Höfle, B.; Hollaus, M. Urban vegetation detection using high density full-waveform airborne lidar data-combination of object-based image and point cloud analysis. In ISPRS TC VII Symposium—100 Years ISPRS; Wagner, W., Székely, B., Eds.; IAPRS: Vienna, Austria, 2010; Volume XXXVIII. [Google Scholar]
- Moskal, L.M.; Styers, D.M.; Halabisky, M. Monitoring urban tree cover using object-based image analysis and public domain remotely sensed data. Remote Sens. 2011, 3, 2243–2262. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, S.; Vailshery, L.S.; Jaganmohan, M.; Nagendra, H. Mapping urban tree species using very high resolution satellite imagery: Comparing Pixel-Based and Object-Based Approaches. ISPRS Int. J. Geoinf. 2013, 2, 220–236. [Google Scholar] [CrossRef]
- McPherson, E.G.; Simpson, J.R.; Xiao, Q.; Wu, C. Million trees Los Angeles canopy cover and benefit assessment. Landsc. Urban Plan. 2011, 99, 40–50. [Google Scholar] [CrossRef]
- Wu, C.; Xiao, Q.; McPherson, E.G. A method for locating potential tree-planting sites in urban areas: A case study of Los Angeles, USA. Urban For. Urban Green. 2008, 7, 65–76. [Google Scholar] [CrossRef]
- Parlin, M. Seattle Washington Urban Tree Canopy Analysis Project Report: Looking Back and Moving Forward; Native Communities Development Corporation: Colorado Springs, CO, USA, 2009. [Google Scholar]
- Bauer, M.; Kilberg, D.; Martin, M.; Tagar, Z. Digital Classification and Mapping of Urban Tree Cover: City of Minneapolis; University of Minnesota: St. Paul, MN, USA, 2011. [Google Scholar]
- Kilberg, D.; Martin, M.; Bauer, M. Mapping Urban Tree Cover: Object Oriented Image Analysis of QuickBird and Lidar Data; University of Minnesota: St. Paul, MN, USA, 2012. [Google Scholar]
- McPherson, E.G.; Sacamano, P.L.; Wensman, S. Modeling Benefits and Costs of Community Tree Plantings; USDA Forest Service—Pacific Southwest Research Station: Davis, CA, USA, 1993.
- Procuraduría Ambiental y del Ordenamiento Territorial del D.F (PAOT). Presente y Futuro de las Áreas Verdes y Arbolado de la Ciudad de Mexico; [Present and Future of the Green Areas and Trees in Mexico City]; PAOT: CDMX, Mexico, 2010. [Google Scholar]
- Astrium. SPOT 6 & SPOT 7 Imagery User Guide; Astrium Services: Toulouse, France, 2013. [Google Scholar]
- Environmental Systems Research Institute Inc. (ESRI). ArcGIS Version 10.3; ESRI: Redlands, CA, USA, 2006. [Google Scholar]
- QGIS Geographic Information System: Open Source Geospatial Foundation Project. 2015. Available online: http://qgis.osgeo.org (accessed on 14 May 2015).
- Norton, B.A.; Coutts, A.M.; Livesley, S.J.; Harris, R.J.; Hunter, A.M.; Williams, N.S.G. Planning for cooler cities: A framework to prioritise green infrastructure to mitigate high temperatures in urban landscapes. Landsc. Urban Plan. 2015, 134, 127–138. [Google Scholar] [CrossRef]
- Chuvieco, S.E. Teledetección Ambiental: La Observación de la Tierra Desde el Espacio; [Environmental Tele Detection: The Earth Observation from Space]; Ariel: Barcelona, Spain, 2002. [Google Scholar]
- Tso, B.; Mather, P.M. Classification Methods for Remotely Sensed Data, 2nd ed.; Taylor & Francis Group: Boca Raton, FL, USA, 2009. [Google Scholar]
- Estoque, R.C.; Murayama, Y.; Akiyama, C.M. Pixel-based and object-based classifications using high- and medium- spatial-resolution imageries in the urban and suburban landscapes. Geocarto Int. 2015, 30, 1113–1129. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. Available online: http://www.jstor.org./stable/2529310 (accessed on 18 March 2017). [CrossRef] [Green Version]
- Galvin, M.F.; Grove, J.M.; O’Neal-Dunne, J.P.M. A Report on Baltimore City’s Present and Potential Urban Tree Canopy; Maryland Department of Natural Resources: Annapolis, MD, USA, 2006.
- Grove, J.M.; Cadenasso, M.L.; Burch, W.L.; Pickett, S.T.A.; Schwarz, K.; O’Neal-Dunne, J.; Wilson, M.; Troy, A.; Boone, C. Data and methods comparing social structure and vegetation structure of urban neighborhoods in Baltimore, Maryland. Soc. Nat. Resour. 2006, 19, 117–136. [Google Scholar] [CrossRef]
- Dimoudi, A.; Nikolopoulou, M. Vegetation in the urban environment: Microclimatic analysis and benefits. Energy Build. 2003, 35, 69–76. [Google Scholar] [CrossRef] [Green Version]
- Rowntree, R.A. Forest canopy cover and land use in four Eastern United States cities. Urban Ecol. 1984, 8, 55–67. [Google Scholar] [CrossRef]
- Van Elegem, B.; Embo, T.; Muys, B.; Lust, N. A methodology to select the best locations for new urban forests using multicriteria analysis. Forestry 2002, 75, 13–23. [Google Scholar] [CrossRef]
- Bowler, D.E.; Buyung-Ali, L.; Knight, T.M.; Pullin, A.S. Urban greening to cool towns and cities: A systematic review of the empirical evidence. Landsc. Urban Plan. 2010, 97, 147–155. [Google Scholar] [CrossRef]
- Pataki, D.E.; Carreiro, M.M.; Cherrier, J.; Grulke, N.E.; Jennings, V.; Pincetl, S.; Pouyat, R.V.; Whitlow, T.H.; Zipperer, W.C. Coupling biogeochemical cycles in urban environments: Ecosystem services, green solutions, and misconceptions. Front. Ecol. Environ. 2011, 9, 27–36. [Google Scholar] [CrossRef]
- Chacalo, A.; Aldama, A.; Grabinsky, J. Street tree inventory in Mexico City. J. Arboric. 1994, 20, 222–226. Available online: http://joa.isa-arbor.com/request.asp?JournalID=1&ArticleID=2632&Type=2 (accessed on 13 December 2016).
- Procuraduría Ambiental y del Ordenamiento Territorial (PAOT). Manejo y Conservación de Áreas Verdes: Informe Annual; [Management and Conservation of Green Areas. Annual Report]; PAOT: CDMX, Mexico, 2003; Available online: http://paot.org.mx/centro/paot/informe2003/temas/manejo.pdf (accessed on 30 April 2017).
- Parsons, R. Conflict between ecological sustainability and environmental aesthetics: Conundrum, canard or curiosity. Landsc. Urban Plan. 1995, 32, 227–244. [Google Scholar] [CrossRef]
- Randall, T.A.; Churchill, C.J.; Baetz, B.W. A GIS-based decision support system for neighbourhood greening. Environ. Plan. B Plan. Des. 2003, 30, 541–563. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Description |
|---|---|
| Multispectral Imagery (4 bands) | Blue (0.455 µm–0.525 µm) Green (0.530 µm–0.590 µm) Red (0.625 µm–0.695 µm) Near-Infrared (0.760 µm–0.890 µm) |
| Resolution (GSD) 1 | Panchromatic—1.5 m Multispectral—6.0 m (B, G, R, NIR) 2 |
| Location Accuracy | 10 m (CE90) |
| Imaging Swath | 60 Km at Nadir |
| Cover | Number of Training Sites | Number of Validation Sites | Training Area by Type of Cover (ha) |
|---|---|---|---|
| Tree | 140 | 40 | 0.504 |
| Grass | 100 | 40 | 0.360 |
| Bare soil | 80 | 40 | 0.288 |
| Impervious surface | 0 | 40 | 0 |
| Borough | Tree (A) ha | Grass (B) ha | Bare Soil (C) (ha) | Potential Sites (B + C) (ha) | Sports Areas (D) (ha) | Total (A + B + C + D) (ha) (%) |
|---|---|---|---|---|---|---|
| Álvaro Obregón | 944.8 | 235.7 | 196.3 | 432.1 | 15.4 | 1392.4 (13.8) |
| Azcapotzalco | 291.2 | 24.2 | 62.1 | 86.3 | 15.5 | 393.0 (3.9) |
| Benito Juárez | 218.3 | 3.2 | 9.4 | 12.7 | 1.6 | 232.5 (2.3) |
| Coyoacán | 889.7 | 51.0 | 154.1 | 205.1 | 35.2 | 1130.0 (11.2) |
| Cuajimalpa | 169.1 | 103.3 | 34.3 | 137.6 | 0.3 | 307.1 (3.1) |
| Cuauhtémoc | 300.2 | 19.5 | 41.8 | 61.3 | 1.8 | 363.4 (3.6) |
| Gustavo A. Madero | 673.5 | 167.4 | 150.2 | 317.6 | 55.6 | 1046.7 (10.4) |
| Iztacalco | 141.6 | 34.8 | 48.2 | 83.0 | 14.4 | 239.0 (2.4) |
| Iztapalapa | 515.5 | 159.5 | 410.2 | 569.6 | 69.1 | 1154.2 (11.5) |
| La Magdalena Contreras | 212.9 | 24.3 | 23.2 | 47.4 | 1.0 | 261.4 (2.6) |
| Miguel Hidalgo | 972.7 | 160.1 | 140.2 | 300.3 | 5.6 | 1278.6 (12.7) |
| Tláhuac | 71.2 | 17.2 | 108.4 | 125.6 | 7.8 | 204.6 (2.0) |
| Tlalpan | 864.6 | 56.9 | 147.3 | 204.2 | 11.2 | 1080.0 (10.7) |
| Venustiano Carranza | 202.2 | 97.7 | 256.0 | 353.8 | 15.8 | 571.8 (7.7) |
| Xochimilco | 232.6 | 95.9 | 68.1 | 164.0 | 6.0 | 402.6 (4.0) |
| Total | 6700.3 | 1250.7 | 1850 | 3100.7 | 256.4 | 10,057.4 (100.0) |
| Borough | Urban Land (ha) | Tree (ha) | Canopy Cover (%) |
|---|---|---|---|
| Álvaro Obregón | 6207 | 944.8 | 15.2 |
| Azcapotzalco | 3350 | 291.2 | 8.7 |
| Benito Juárez | 2668 | 218.3 | 8.1 |
| Coyoacán | 5388 | 889.7 | 16.5 |
| Cuajimalpa | 1717 | 169.1 | 9.8 |
| Cuauhtémoc | 3250 | 300.2 | 9.2 |
| Gustavo A. Madero | 7833 | 673.5 | 8.6 |
| Iztacalco | 2308 | 141.6 | 6.1 |
| Iztapalapa | 10,740 | 515.5 | 4.8 |
| La Magdalena Contreras | 1519 | 212.9 | 14.0 |
| Miguel Hidalgo | 4636 | 972.7 | 21.0 |
| Tláhuac | 2252 | 71.2 | 3.2 |
| Tlalpan | 5081 | 864.6 | 17.0 |
| Venustiano Carranza | 3383 | 202.2 | 6.0 |
| Xochimilco | 2723 | 232.6 | 8.5 |
| Total | 63,055 | 6700.3 | |
| Mean | 10.6 |
| Borough | Total Green Area Surface (%) | Impervious Surface (%) |
|---|---|---|
| Álvaro Obregón | 22.4 | 77.6 |
| Azcapotzalco | 11.7 | 88.3 |
| Benito Juárez | 8.7 | 91.3 |
| Coyoacán | 21.0 | 79.0 |
| Cuajimalpa | 17.9 | 82.1 |
| Cuauhtémoc | 11.2 | 88.8 |
| Gustavo A. Madero | 13.4 | 86.6 |
| Iztacalco | 10.4 | 89.6 |
| Iztapalapa | 10.7 | 89.3 |
| La Magdalena Contreras | 17.2 | 82.8 |
| Miguel Hidalgo | 27.6 | 72.4 |
| Tláhuac | 9.1 | 90.9 |
| Tlalpan | 21.3 | 78.7 |
| Venustiano Carranza | 16.9 | 83.1 |
| Xochimilco | 14.8 | 85.2 |
| Borough | Tree Canopy Cover (%) | Potential Tree Canopy Cover (%) | Technical Potential (%) | Market Potential (%) |
|---|---|---|---|---|
| Álvaro Obregón | 15.2 | 7.2 | 22.4 | 7.0 |
| Azcapotzalco | 8.7 | 3.0 | 11.7 | 2.6 |
| Benito Juárez | 8.2 | 0.5 | 8.7 | 0.48 |
| Coyoacán | 16.5 | 4.5 | 21.0 | 3.8 |
| Cuajimalpa | 9.8 | 8.0 | 17.9 | 8.0 |
| Cuauhtémoc | 9.2 | 1.9 | 11.2 | 1.9 |
| Gustavo A. Madero | 8.6 | 4.8 | 13.4 | 4.1 |
| Iztacalco | 6.1 | 4.2 | 10.4 | 3.6 |
| Iztapalapa | 4.8 | 5.9 | 10.7 | 5.3 |
| La Magdalena Contreras | 14.0 | 3.2 | 17.2 | 3.1 |
| Miguel Hidalgo | 21.0 | 6.6 | 27.6 | 6.5 |
| Tláhuac | 3.2 | 5.9 | 9.1 | 5.6 |
| Tlalpan | 17.0 | 4.2 | 21.3 | 4.0 |
| Venustiano Carranza | 6.0 | 10.9 | 16.9 | 10.5 |
| Xochimilco | 8.5 | 6.2 | 14.8 | 6.0 |
| Classes | Tree | Grass | Bare Soil | Impervious | Total | User Accuracy (%) | Commission Error (%) |
|---|---|---|---|---|---|---|---|
| Tree | 562 | 0 | 0 | 4 | 566 | 99 | 1 |
| Grass | 3 | 542 | 3 | 5 | 553 | 98 | 2 |
| Bare soil | 1 | 1 | 467 | 9 | 478 | 98 | 2 |
| Impervious | 44 | 37 | 70 | 582 | 733 | 79 | 21 |
| Total | 610 | 580 | 540 | 600 | 2330 | ||
| Producer accuracy (%) | 92 | 93 | 86 | 97 | |||
| Commission error (%) | 8 | 7 | 14 | 3 | |||
| Overall accuracy (%) | 92.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bravo-Bello, J.C.; Martinez-Trinidad, T.; Valdez-Lazalde, J.R.; Romero-Sanchez, M.E.; Martinez-Trinidad, S. Analyzing Potential Tree-Planting Sites and Tree Coverage in Mexico City Using Satellite Imagery. Forests 2020, 11, 423. https://doi.org/10.3390/f11040423
Bravo-Bello JC, Martinez-Trinidad T, Valdez-Lazalde JR, Romero-Sanchez ME, Martinez-Trinidad S. Analyzing Potential Tree-Planting Sites and Tree Coverage in Mexico City Using Satellite Imagery. Forests. 2020; 11(4):423. https://doi.org/10.3390/f11040423
Chicago/Turabian StyleBravo-Bello, Juan C., Tomas Martinez-Trinidad, J. Rene Valdez-Lazalde, Martin E. Romero-Sanchez, and Sergio Martinez-Trinidad. 2020. "Analyzing Potential Tree-Planting Sites and Tree Coverage in Mexico City Using Satellite Imagery" Forests 11, no. 4: 423. https://doi.org/10.3390/f11040423