
Study of a Steel’s Energy Absorption System for Heavy Quadricycles and Nonlinear Explicit Dynamic Analysis of its Behavior under Impact by FEM

 and
and
Abstract
:1. Introduction
2. Longitudinal Energy Absorption in Conventional Vehicles
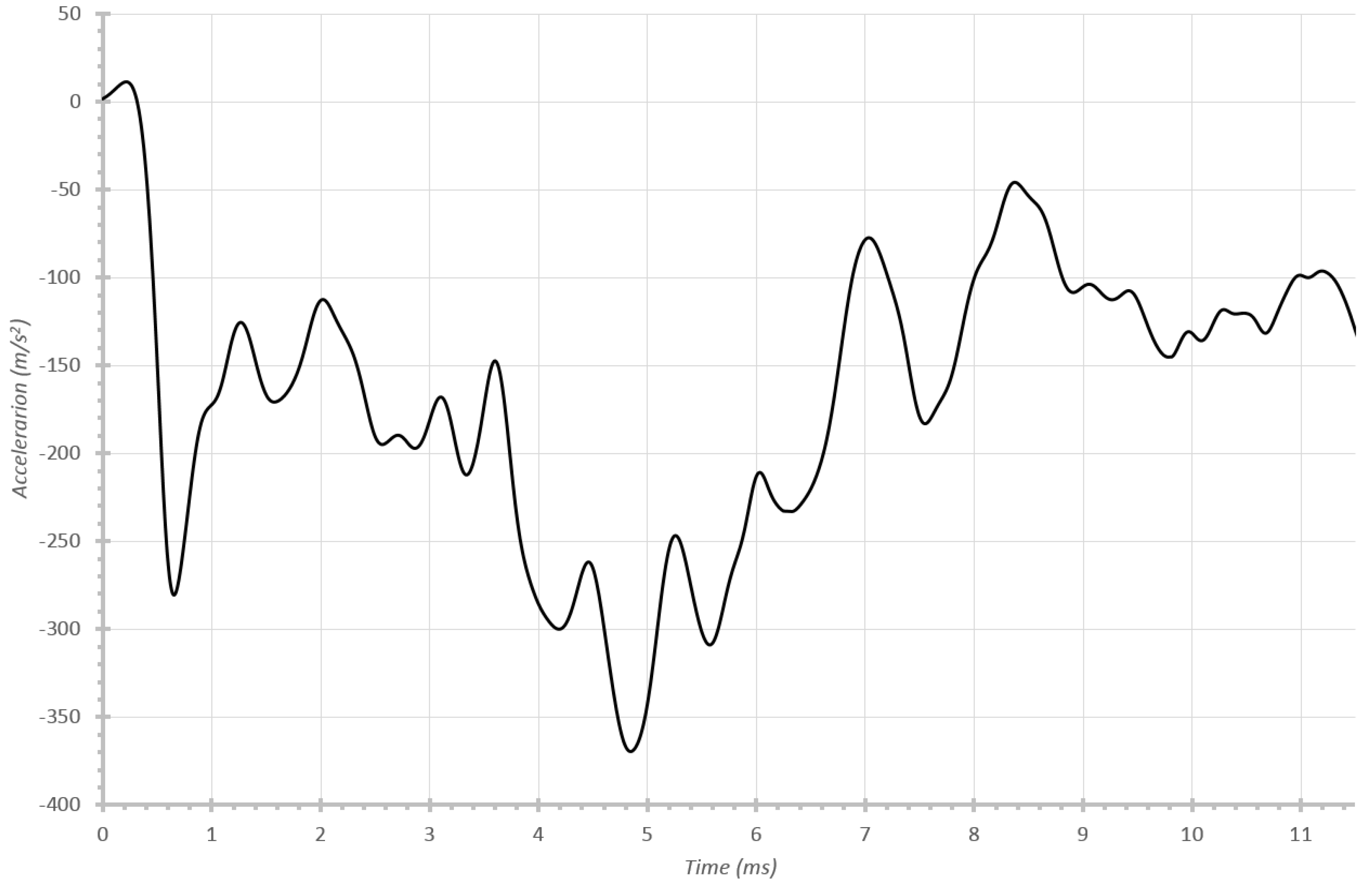
- The first function is to absorb the kinetic energy of the vehicle while keeping those allowable decelerations for the survival of occupants.
- The second function is to preserve the integrity of the passenger compartment and so avoid the intrusion of rigid components into it.
2.1. Energy Absortion Systems
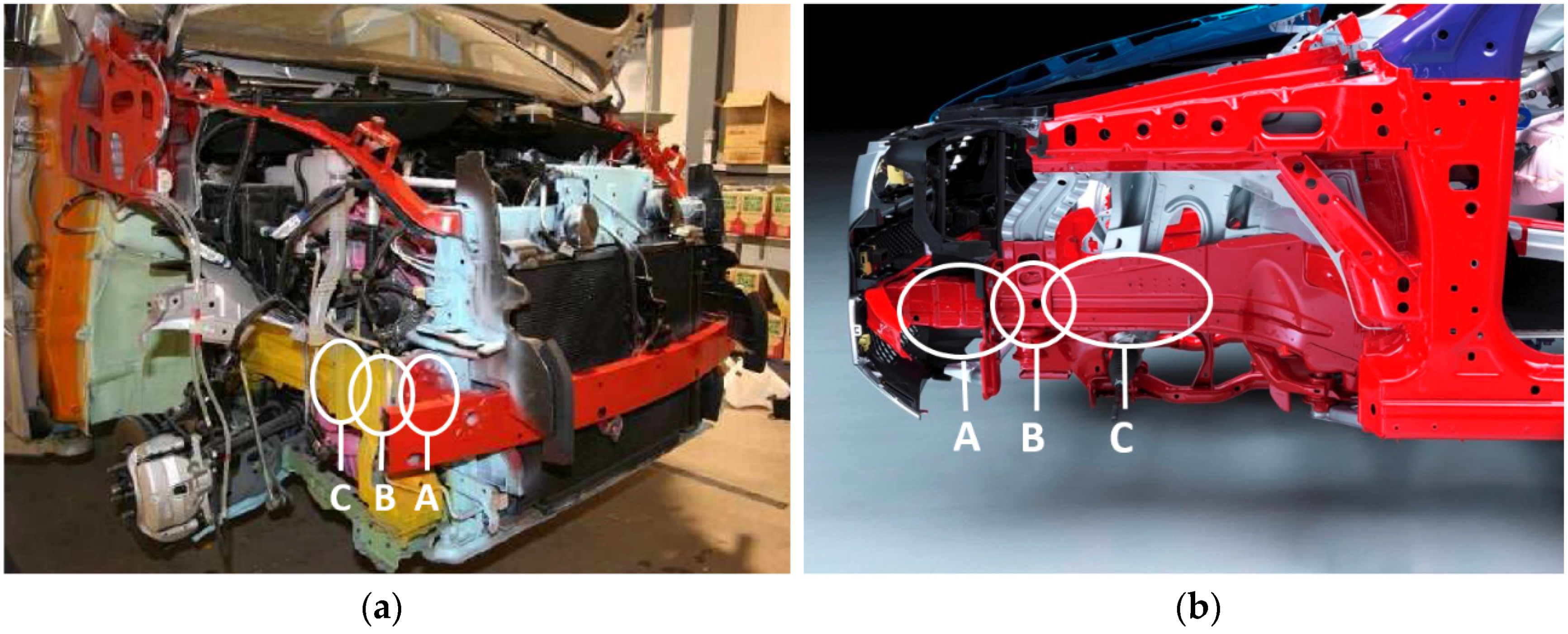
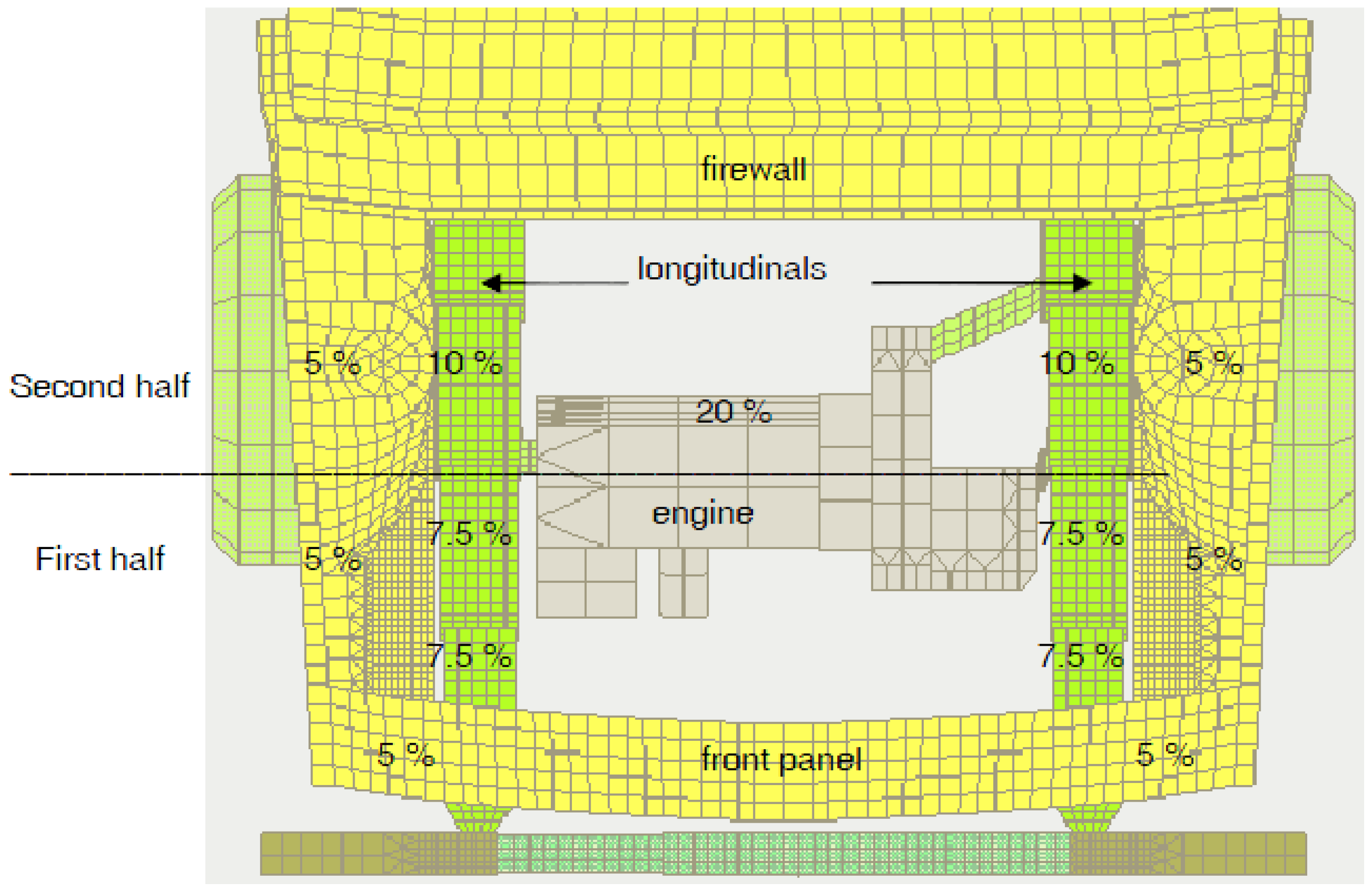
2.2. Energy Absorption Distribution between the Different Components of the Front Structure of an Automobile

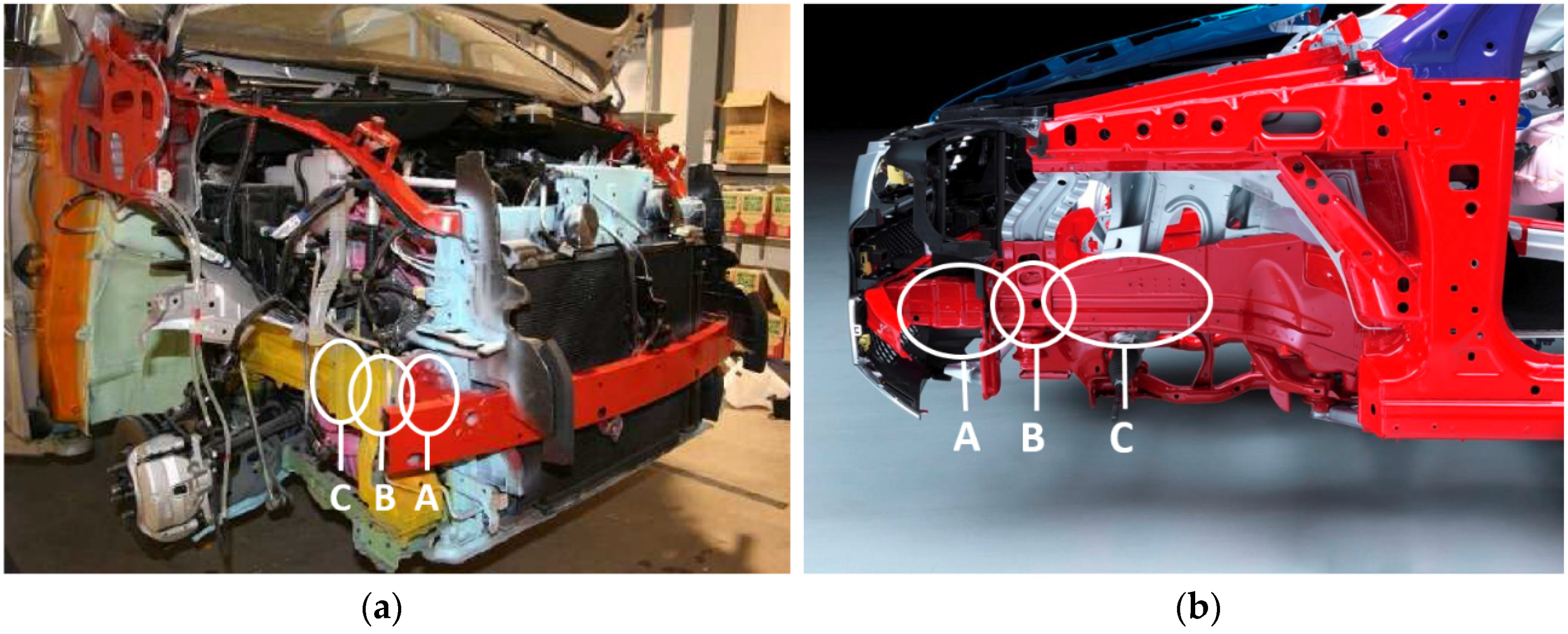
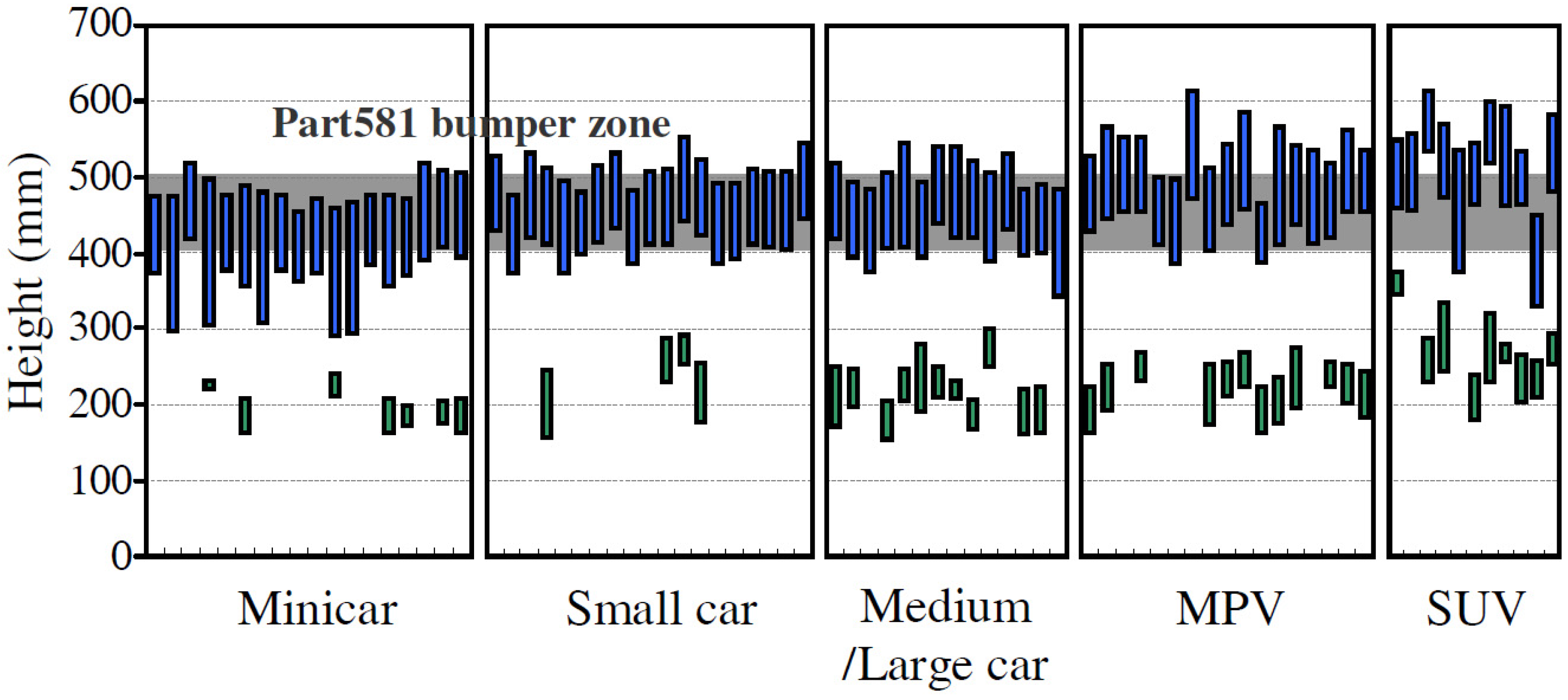
3. Impact Performance of Minicars

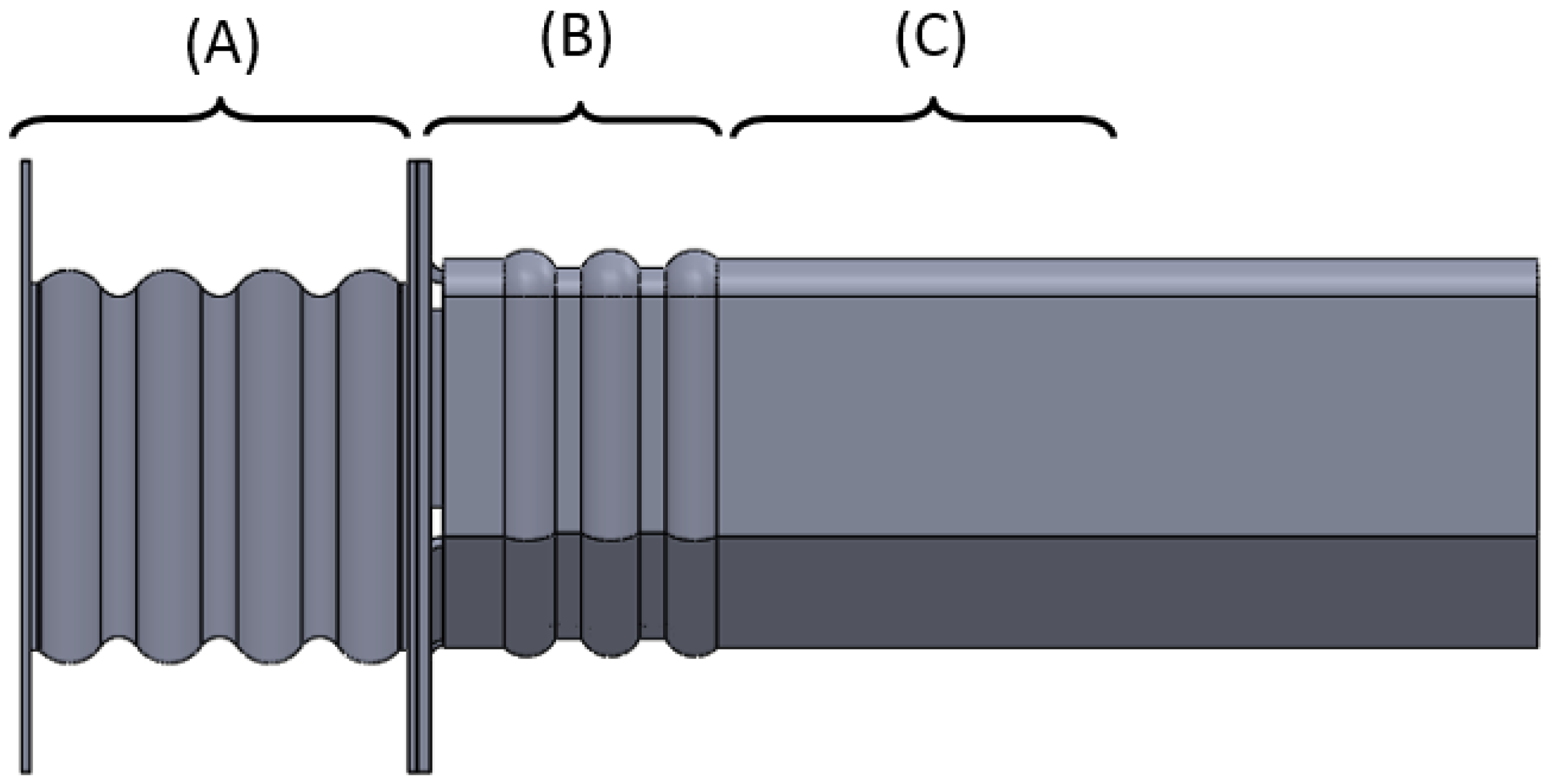
4. Proposed Energy Absorbing System
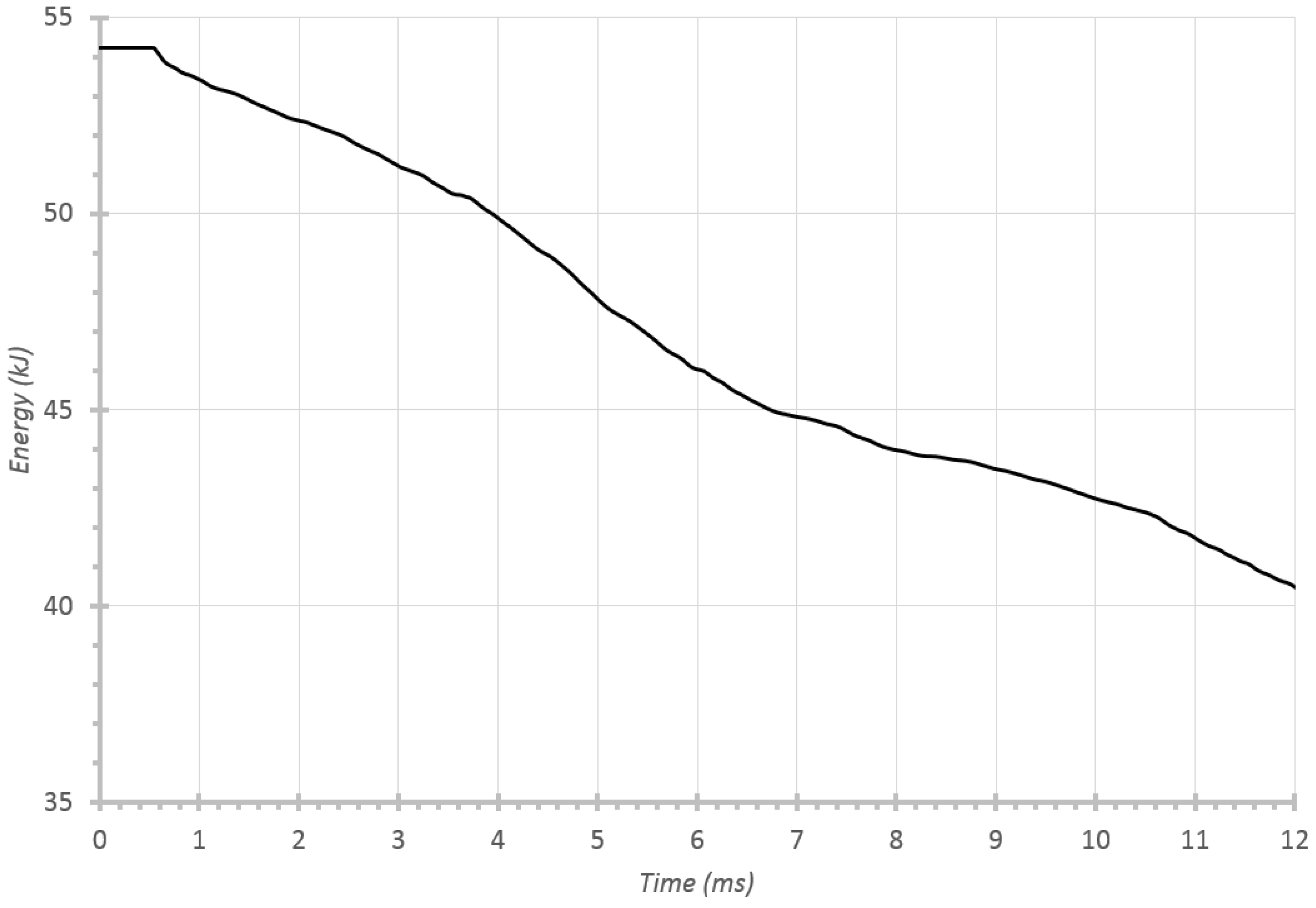
- 7.5% of the initial kinetic energy is absorbed by the crash box;
- 7.5% of the initial kinetic energy is absorbed by the initial section of the frame rail;
- 10% of the initial kinetic energy is absorbed by the final section of the frame rail.
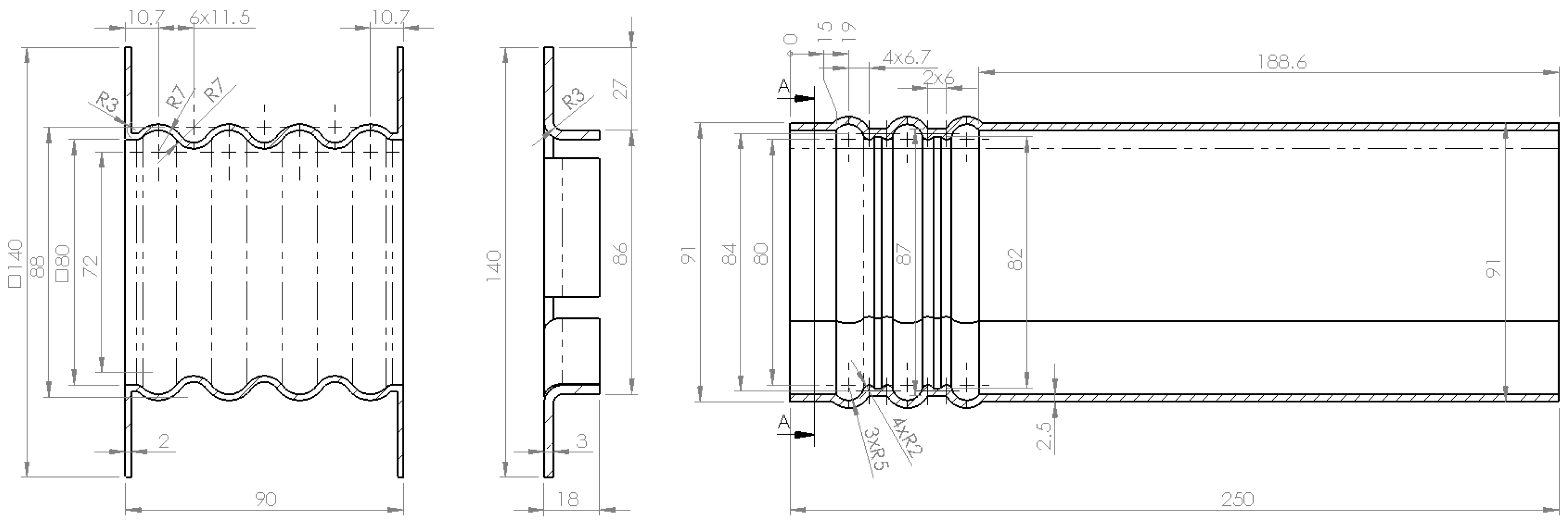
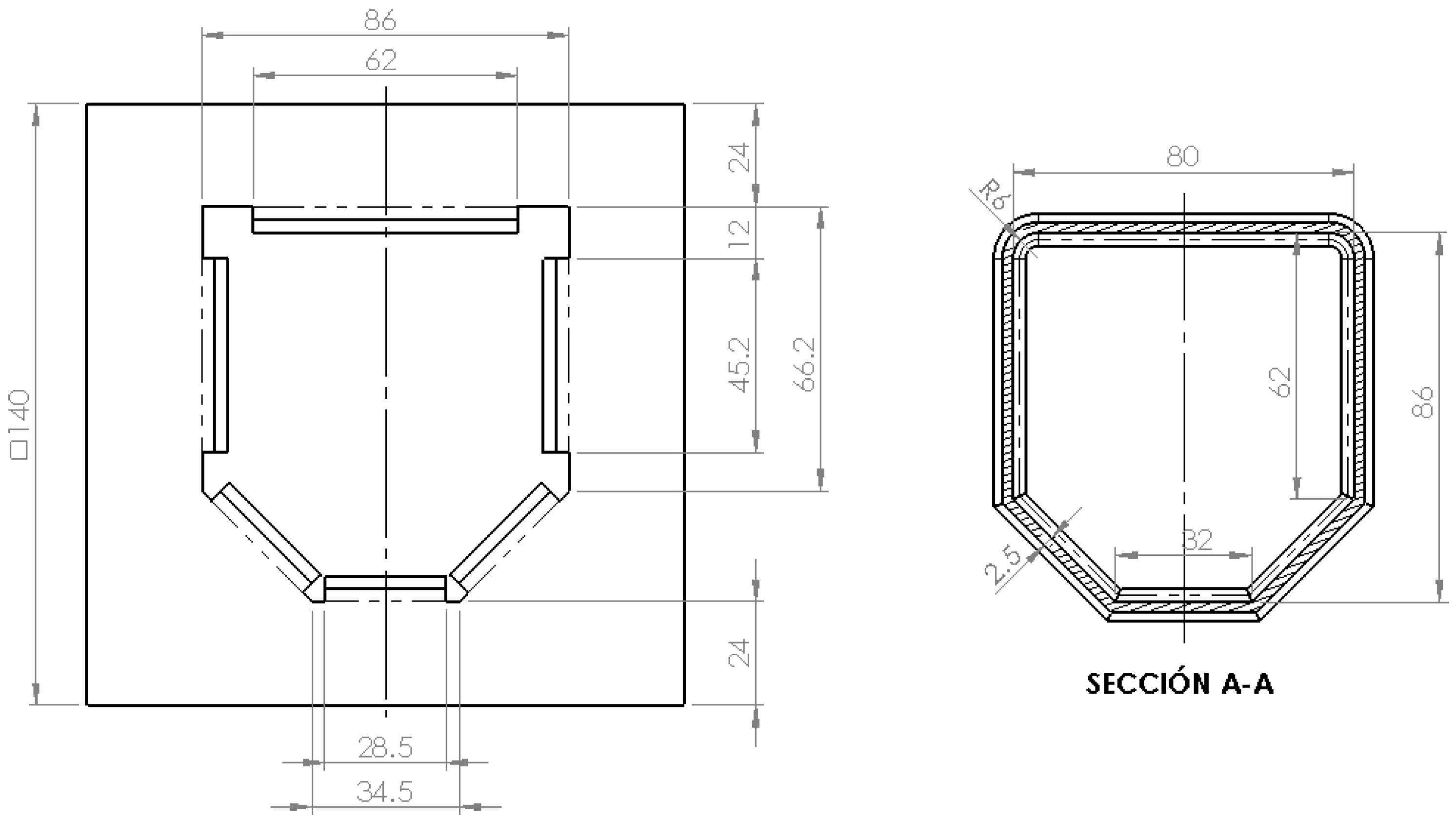
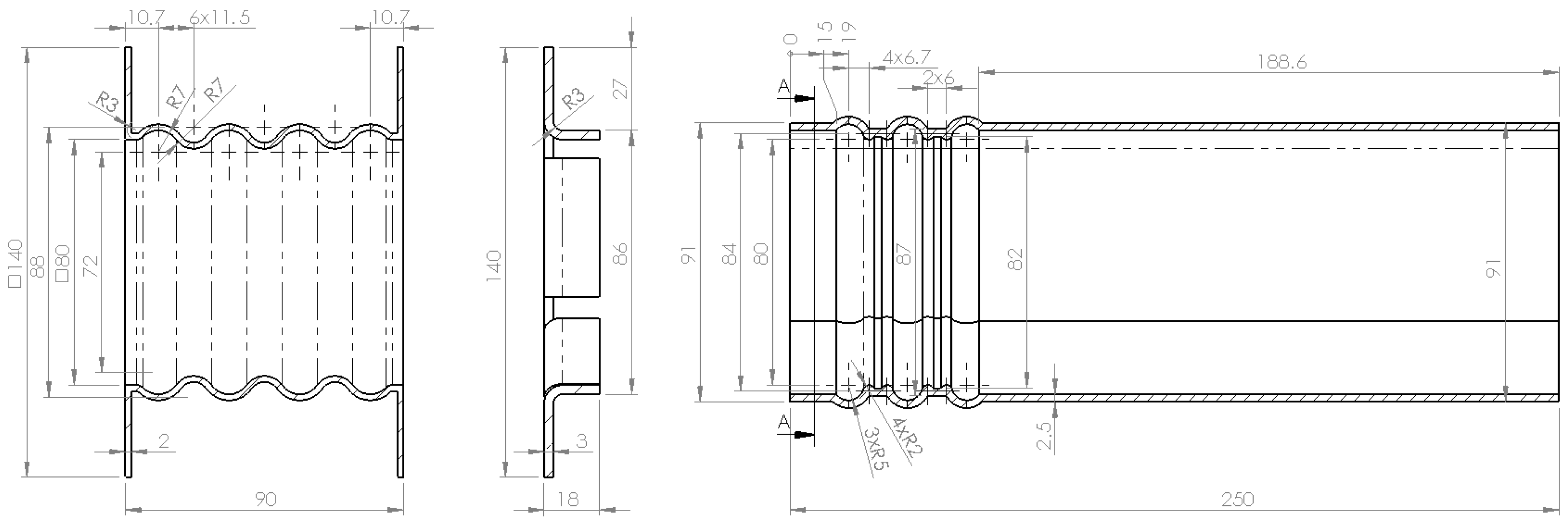
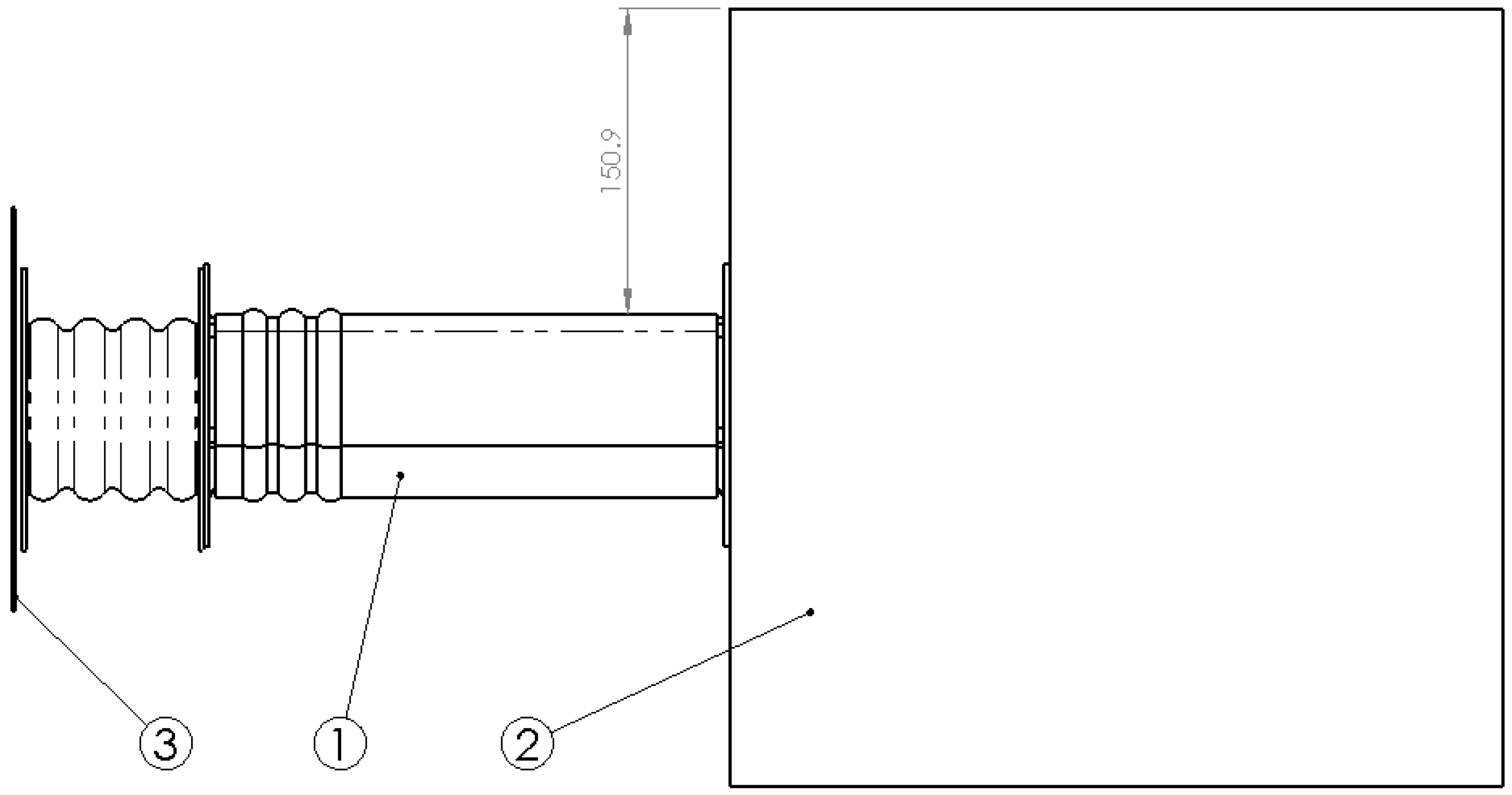
4.1. Proposed Model of the Front Rail
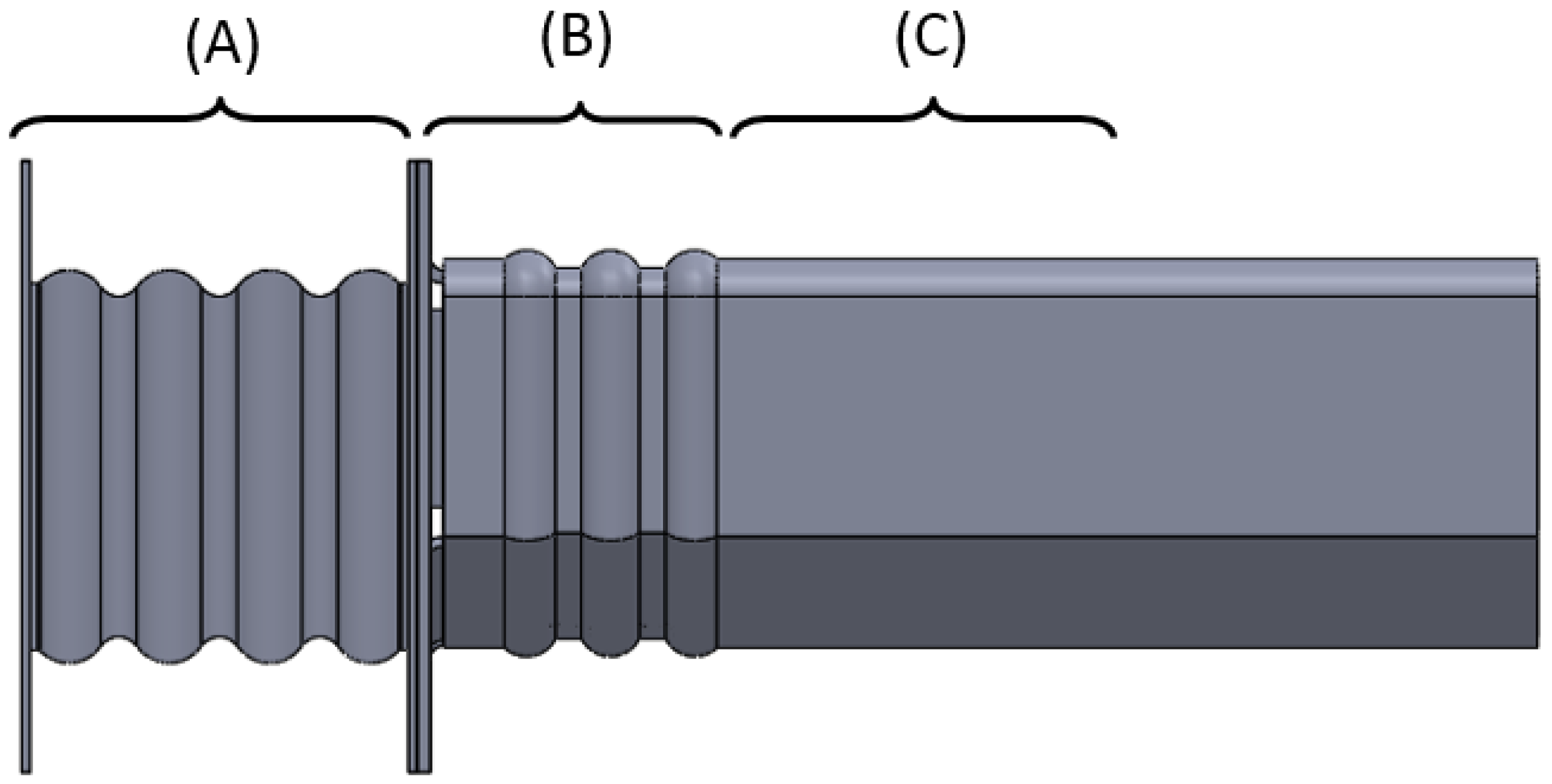
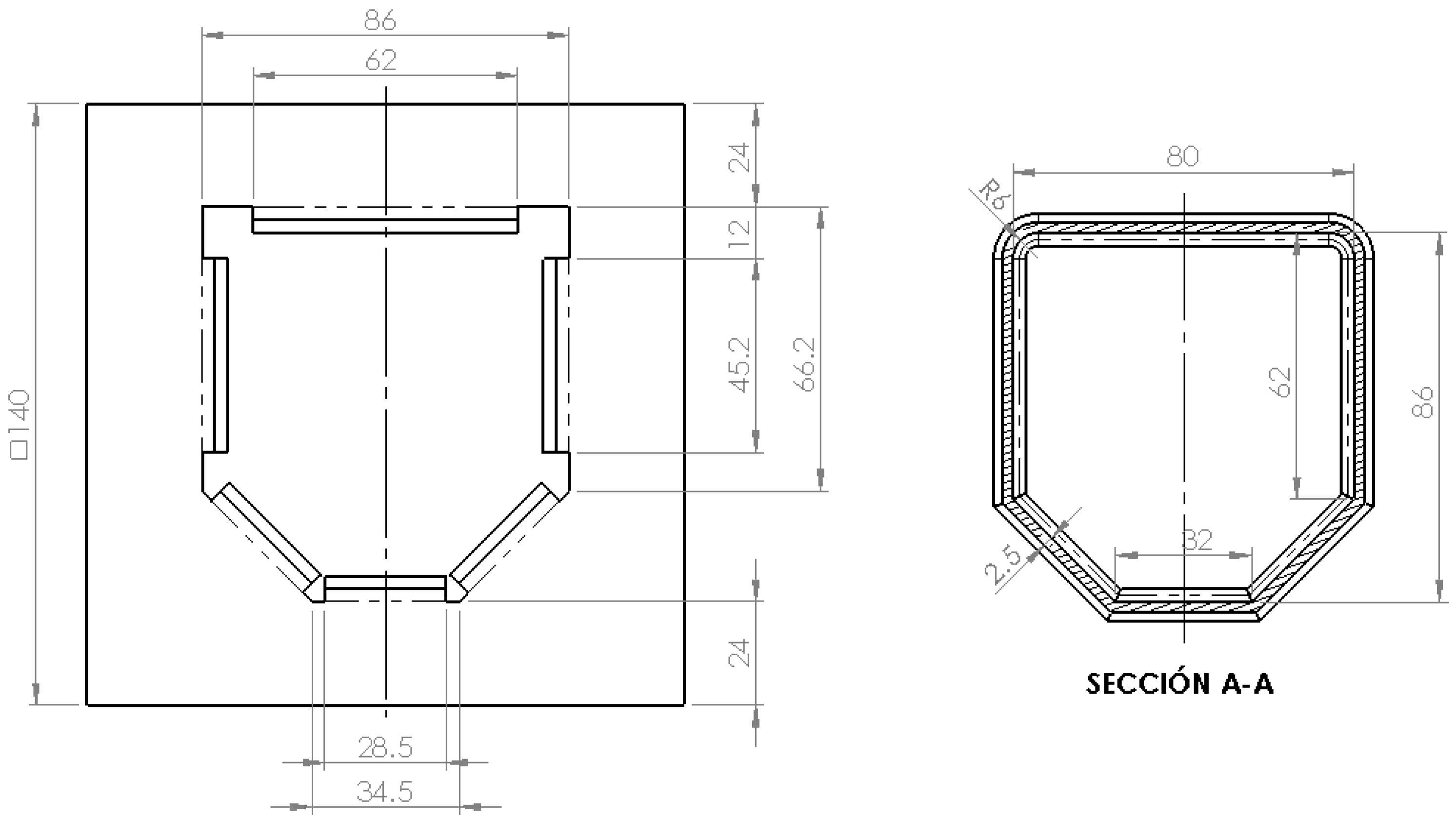
4.2. Three–Dimensional Model
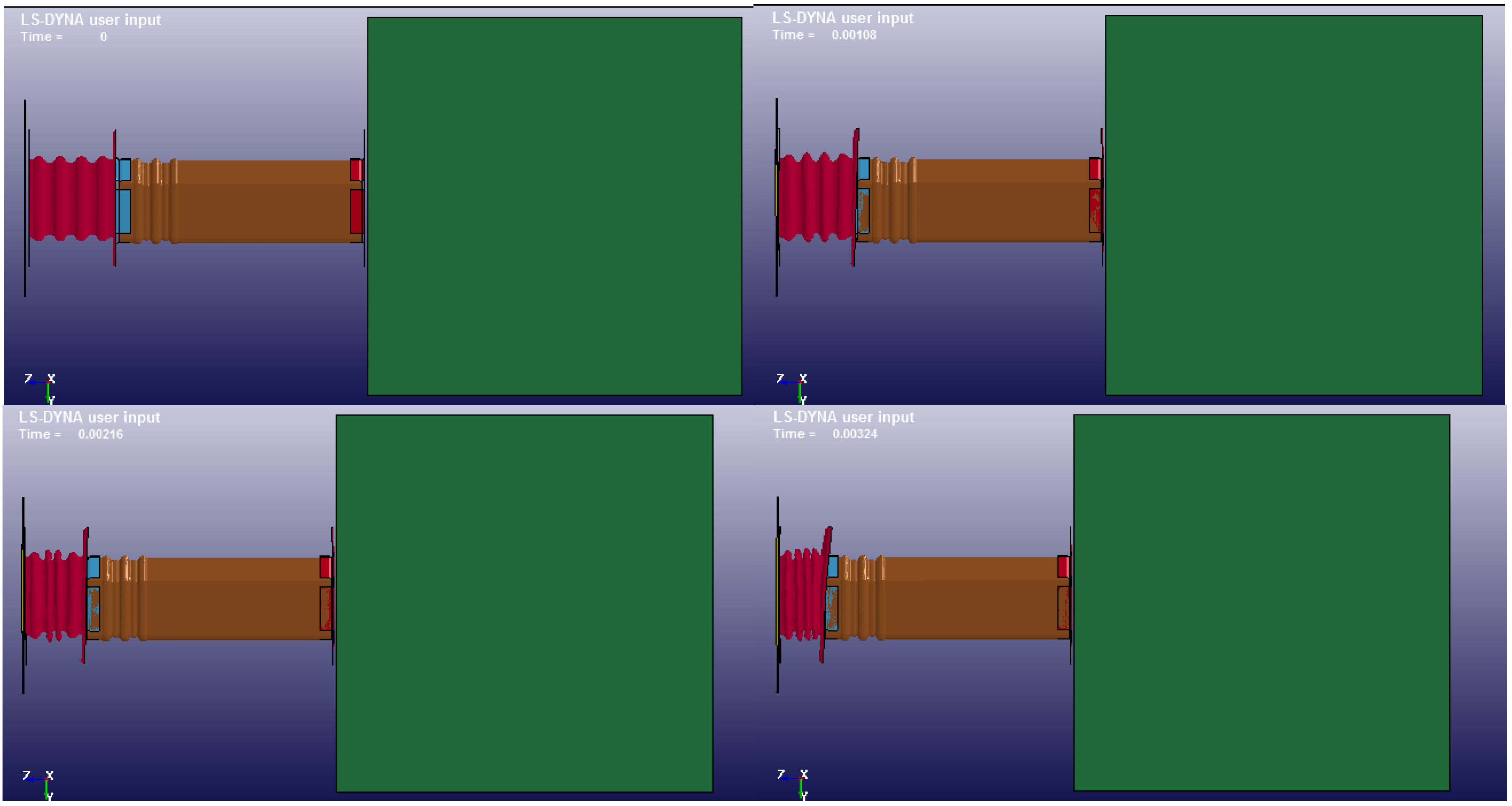
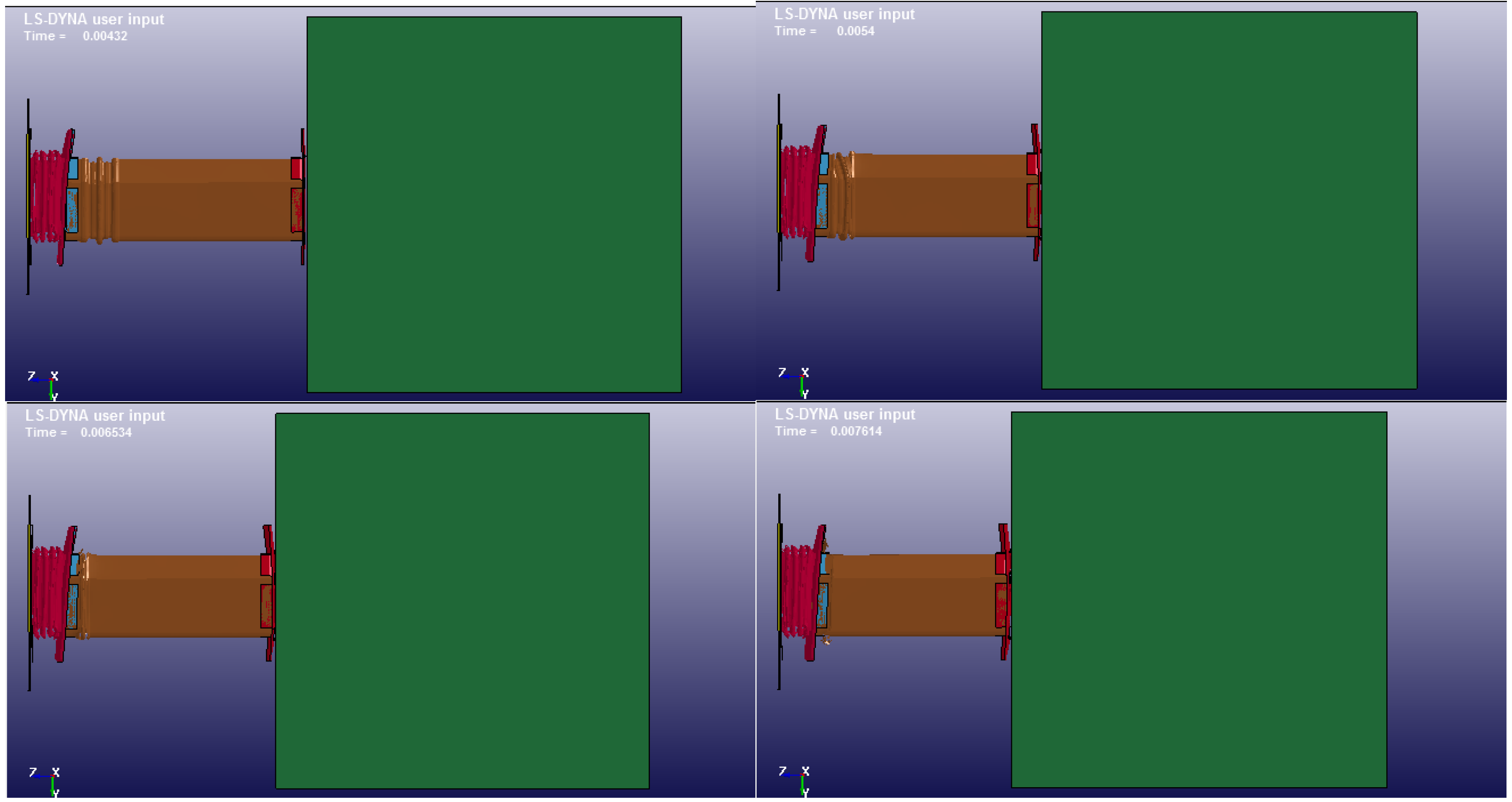
4.3. Layout Analysis of the Proposed Energy Absorption System
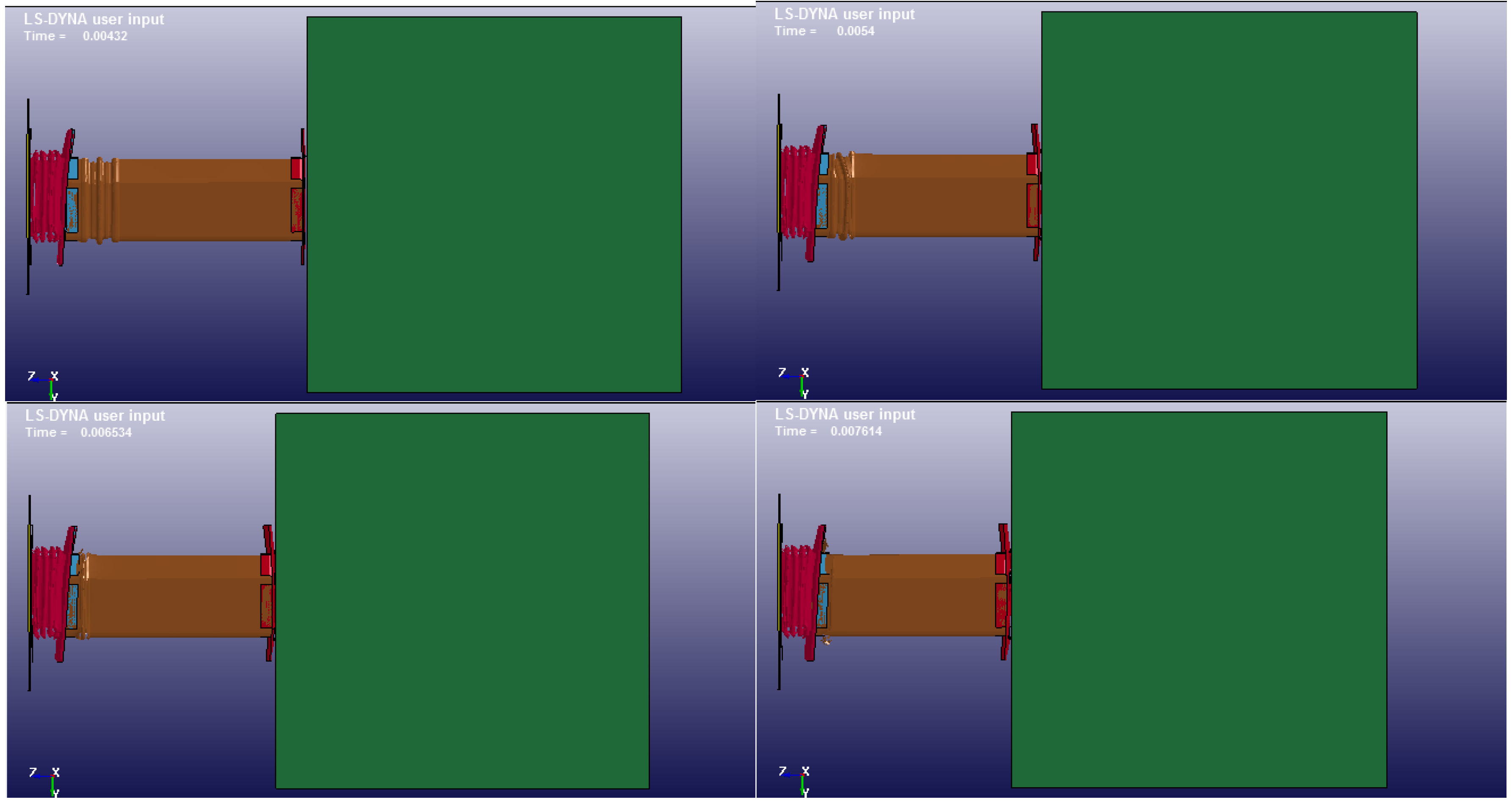
5. Validation of the Proposed Geometry
5.1. Geometrical Definition of the Performed Simulation Test
5.2. Mesh and Boundary Conditions
5.3. Mathematical Model Used for Dynamic Explicit Solution
- is the diagonal mass matrix, depending on if nonlinearity exists;
- are the components of nodal acceleration;
- is the damping matrix, depending on if nonlinearity exists;
- are the components of nodal velocity;
- is the vector of resisting internal forces, where K is the stiffness matrix;
- is the vector of external forces.
- are the components of nodal acceleration at time n;
- are the external and body forces at time n;
- is the stress divergence vector at time n;
- is the hourglass resistance at time n.
- The equations become uncoupled and can be solved directly (explicitly). There is no requirement for iteration during time integration;
- No convergence checks are needed since the equations are uncoupled;
- No inversion of the stiffness matrix is required. All nonlinearities (including contact) are included in the internal force vector.
- To ensure stability and accuracy of the solution, the size of the time step used in Explicit time integration is limited by the Courant-Friedrichs-Levy (CFL) condition [20];
- This condition implies that the time step be limited such that a disturbance (stress wave) cannot travel further than the smallest characteristic element dimension in the mesh, in a single time step;
- Thus the time step criteria for solution stability is as follows:where is the time increment; f is the stability time step factor; h is the characteristic dimension of an element and c is the local material sound speed in an element. The maximum time step that can be used in explicit time integration is inversely proportional to the sound speed of the material and therefore directionally proportional to the square root of the mass of material in an element [16,17,18,19]:where is the material stiffness ; is the material density; m is the material mass and V is the element volume. Artificially increasing the mass of an element can increase the maximum allowable stability time step and reduce the number of time increments required to complete a solution. Mass scaling is applied only to those elements which have a stability time step less than a specified value. If a model contains relatively few small elements, this can be a useful mechanism for reducing the number of time steps required to complete an explicit simulation.
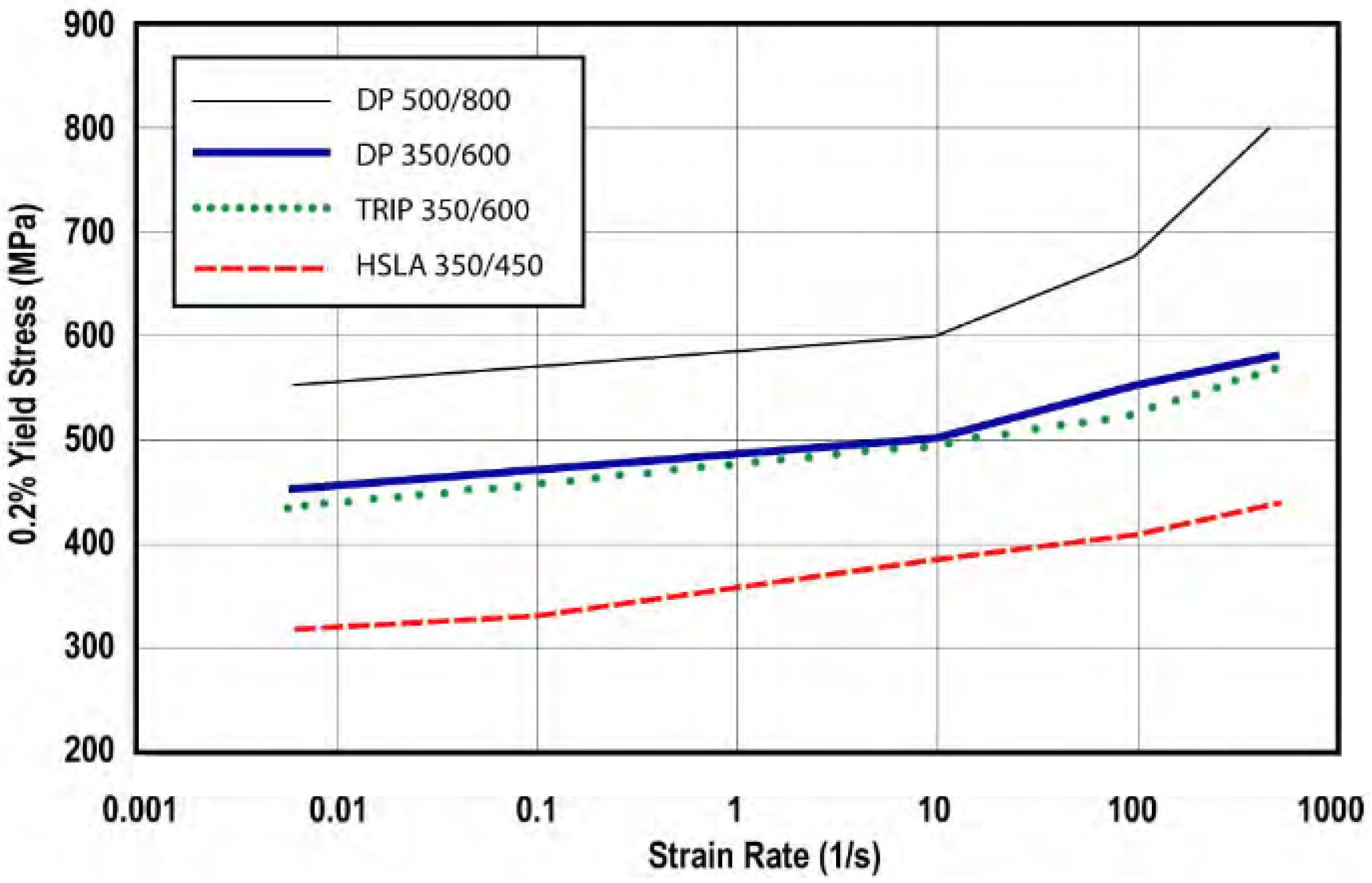
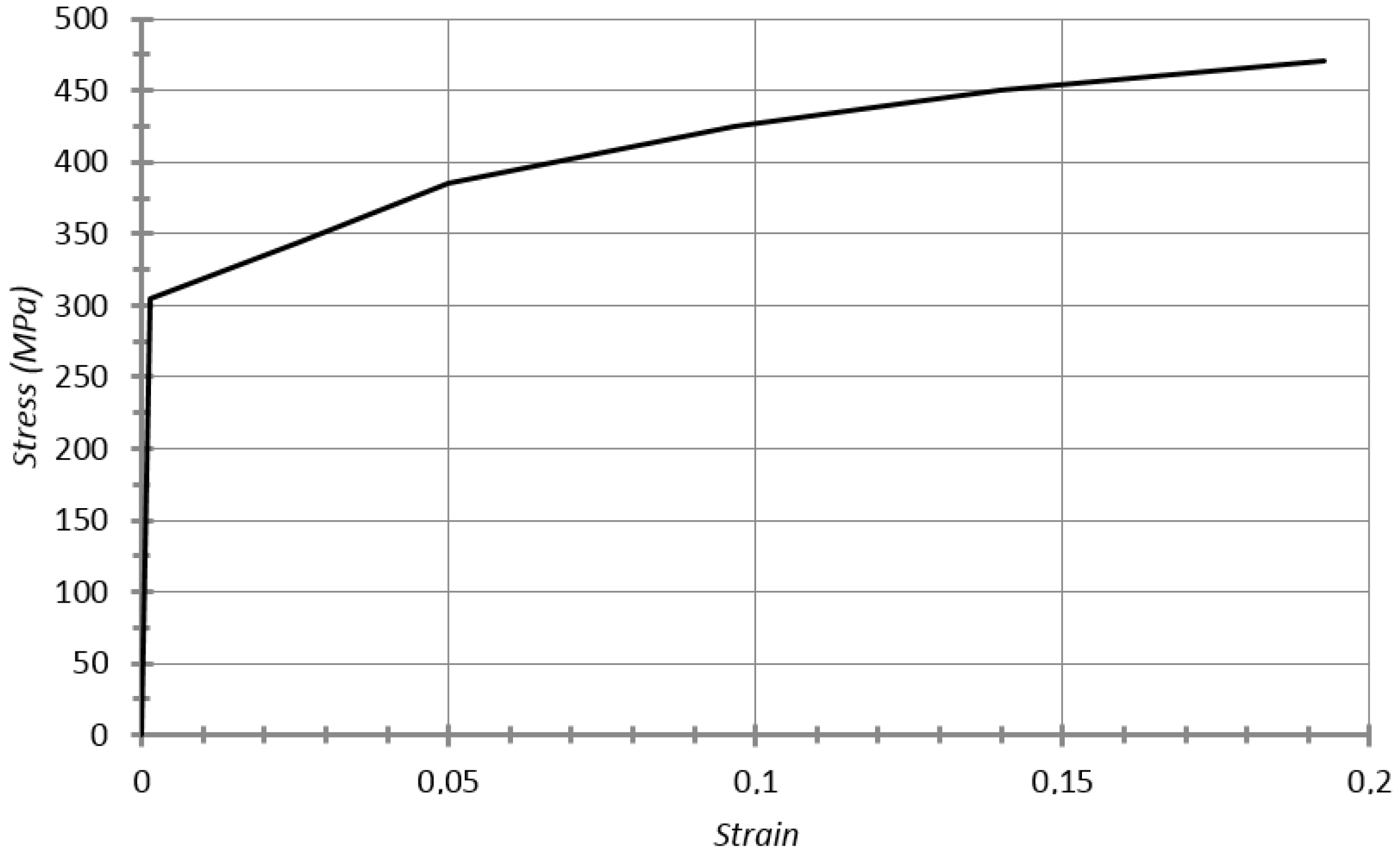
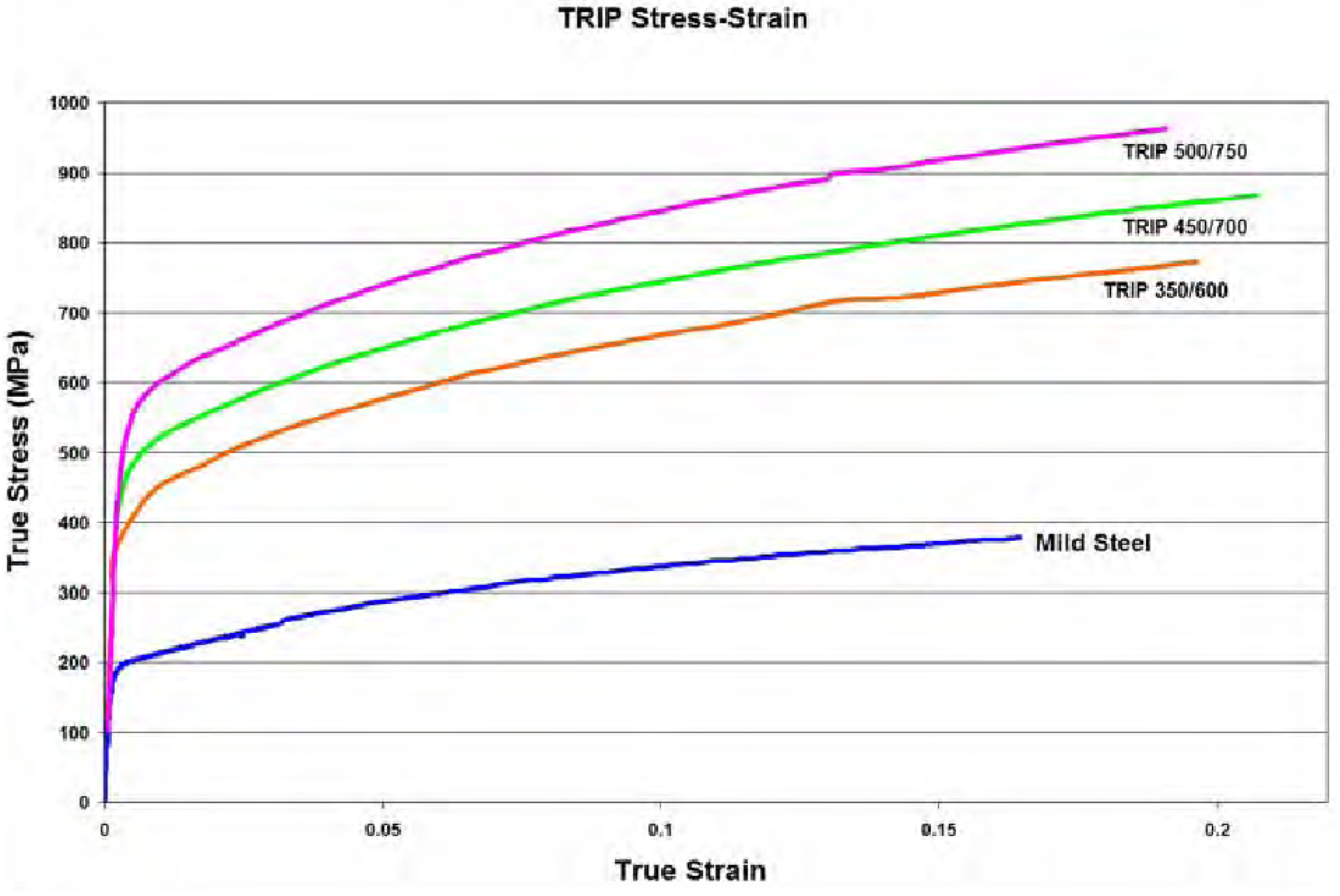
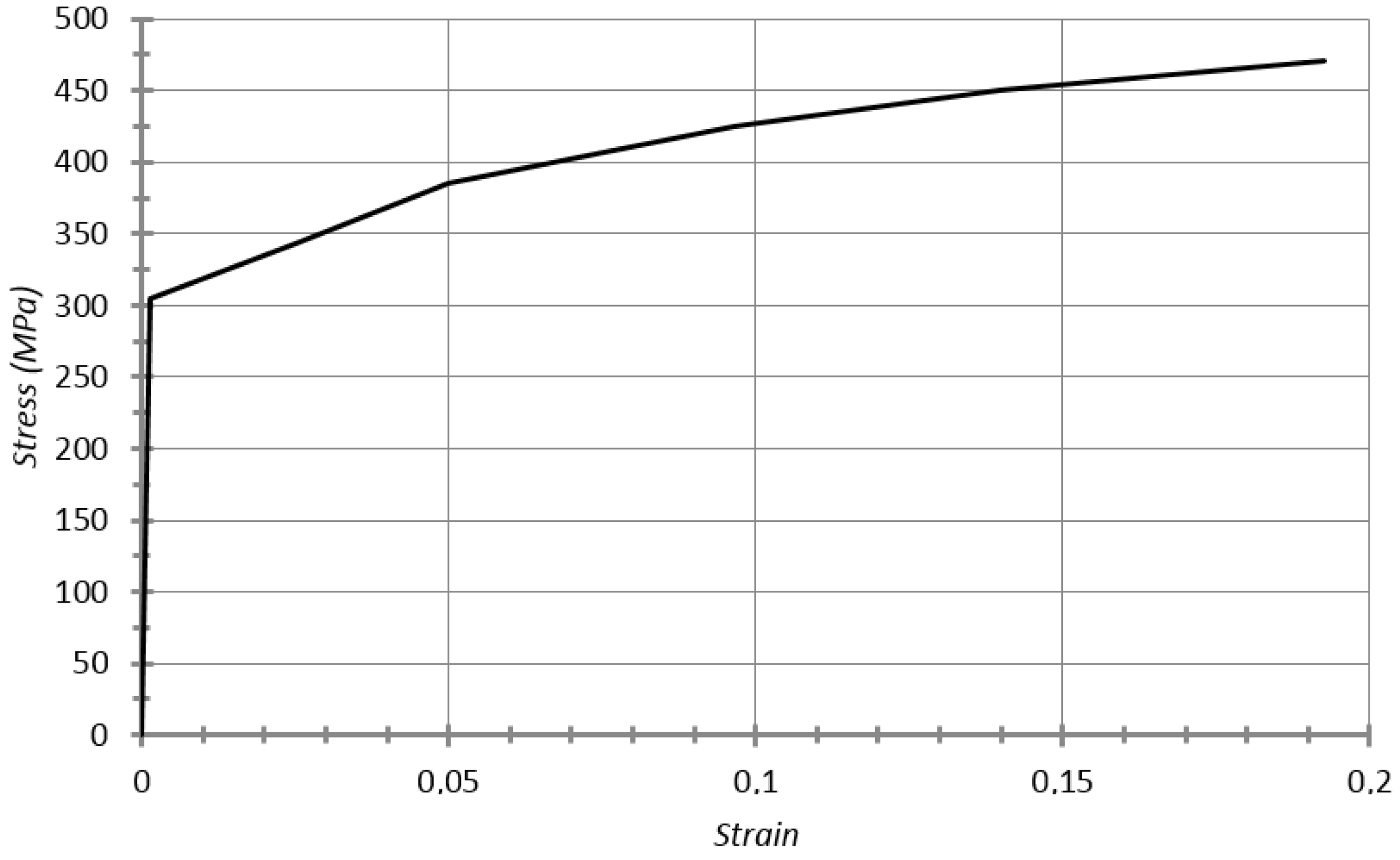
5.4. Material Modelling
- Young’s modulus: 210 × 109 Pa;
- Poisson’s ratio: 0.3;
- Density: 7.850 × 103 kg/m3;
- Yield stress: 350 × 106 Pa;
- Tangent modulus: 2.050 × 109 Pa;
- Ultimate plastic strain: 0.2.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
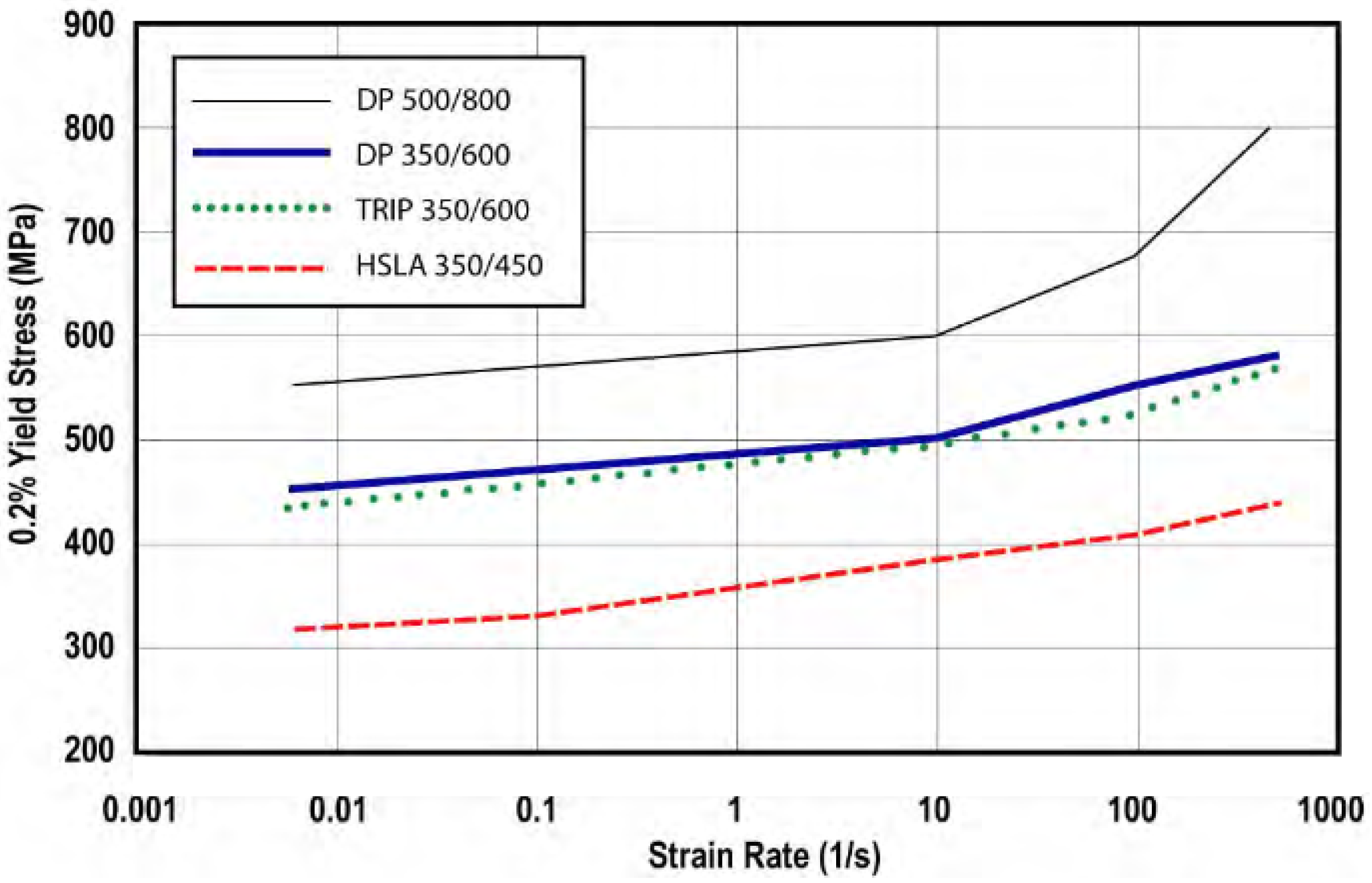
| Strain Rate (s−1) | Multiplying Factor for Yield Stress |
|---|---|
| 0.01 | 1.194 |
| 10 | 1.389 |
| 100 | 1.444 |
| 500 | 1.611 |
5.5. Analysis Settings and Solver
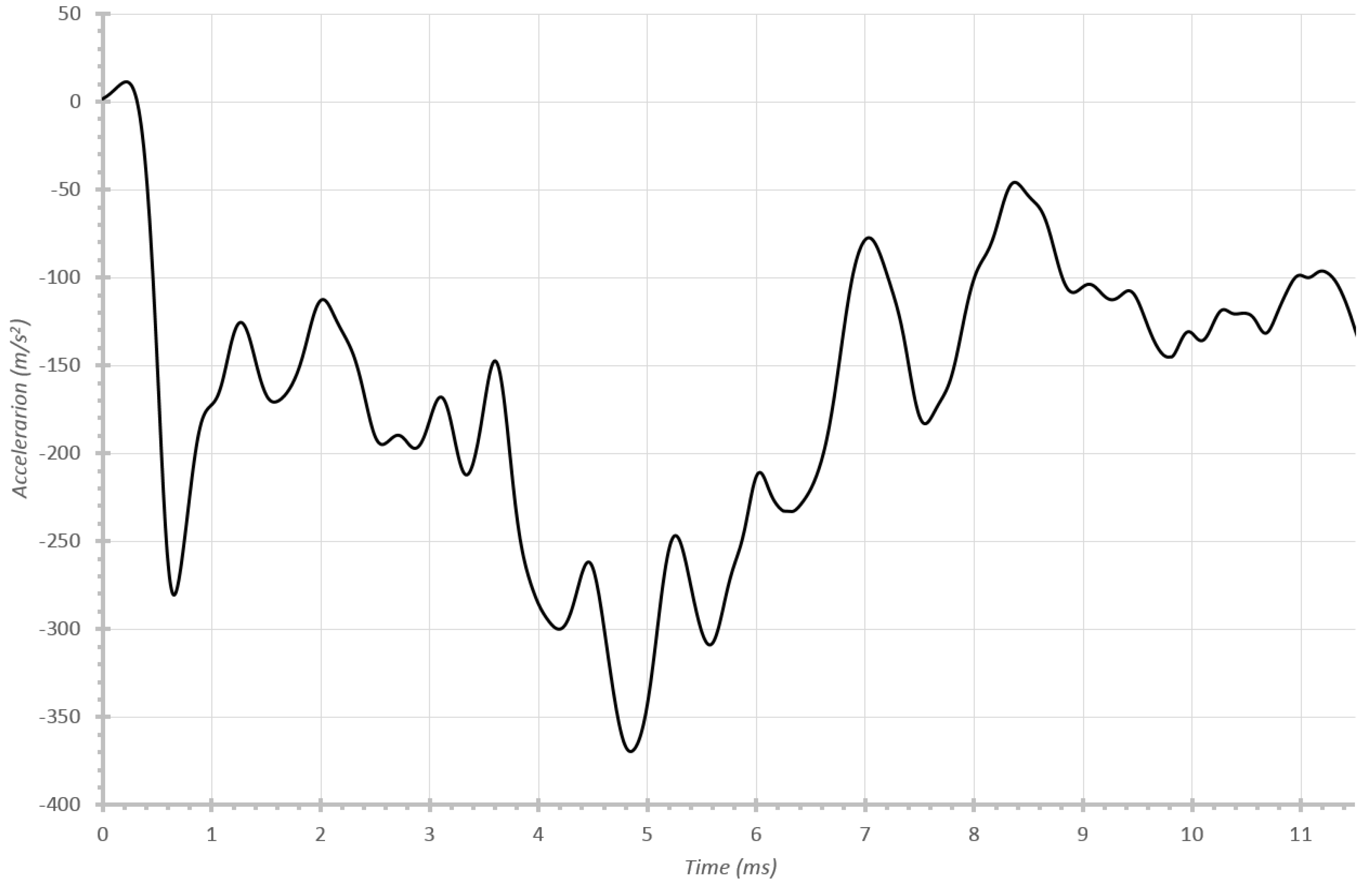
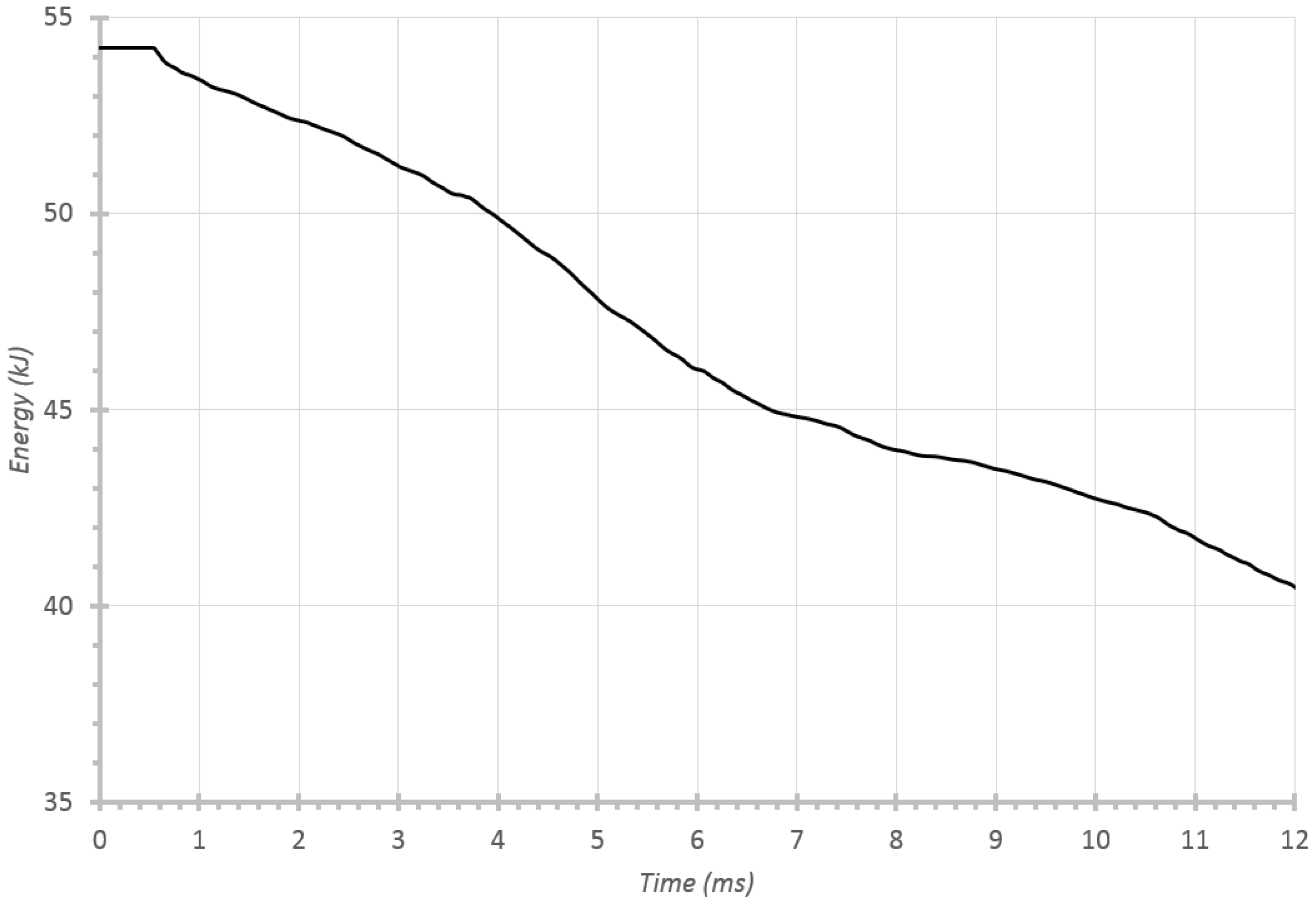
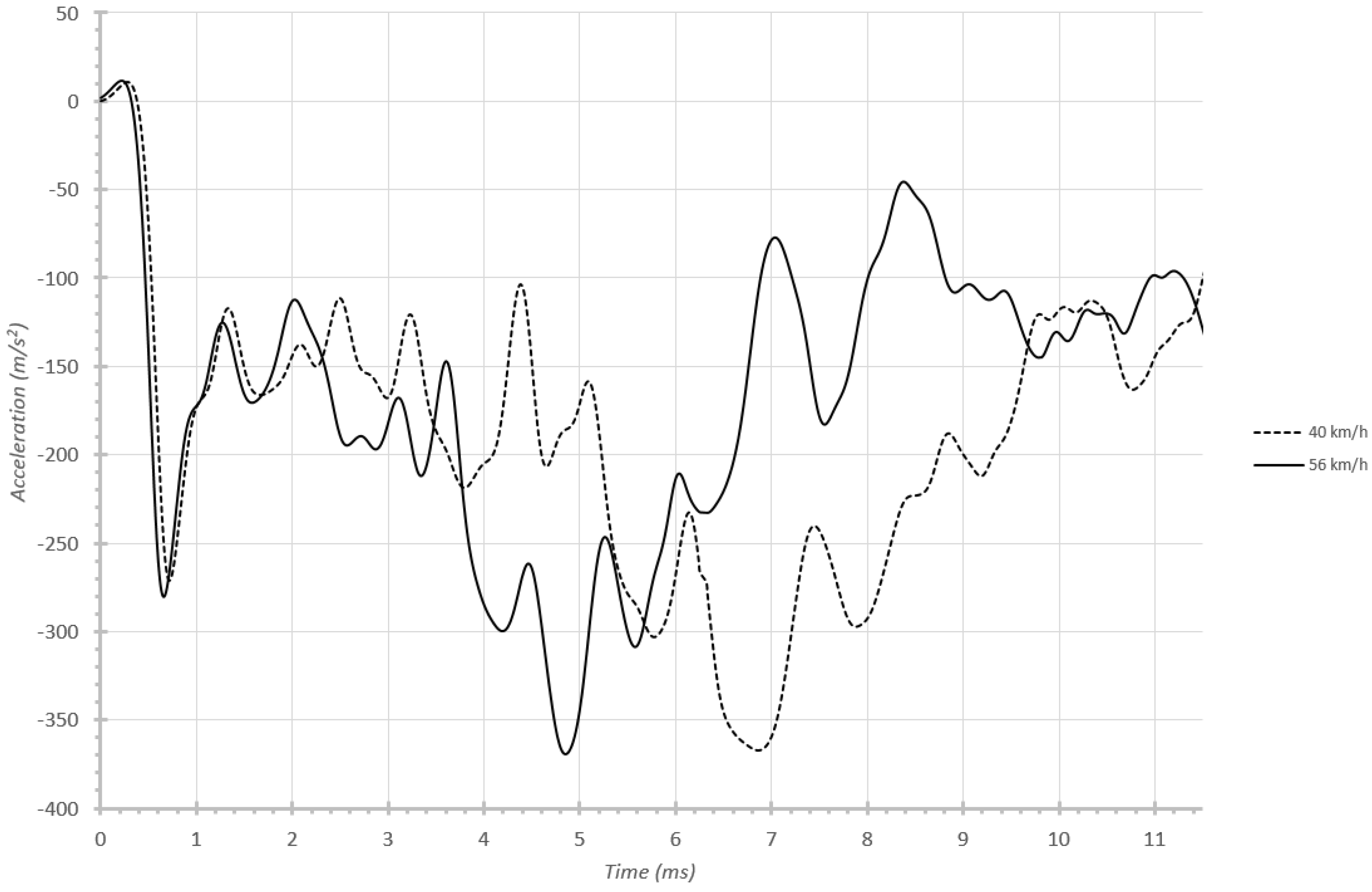
6. Results and Analysis
6.1. Energy Absorption by Different Components
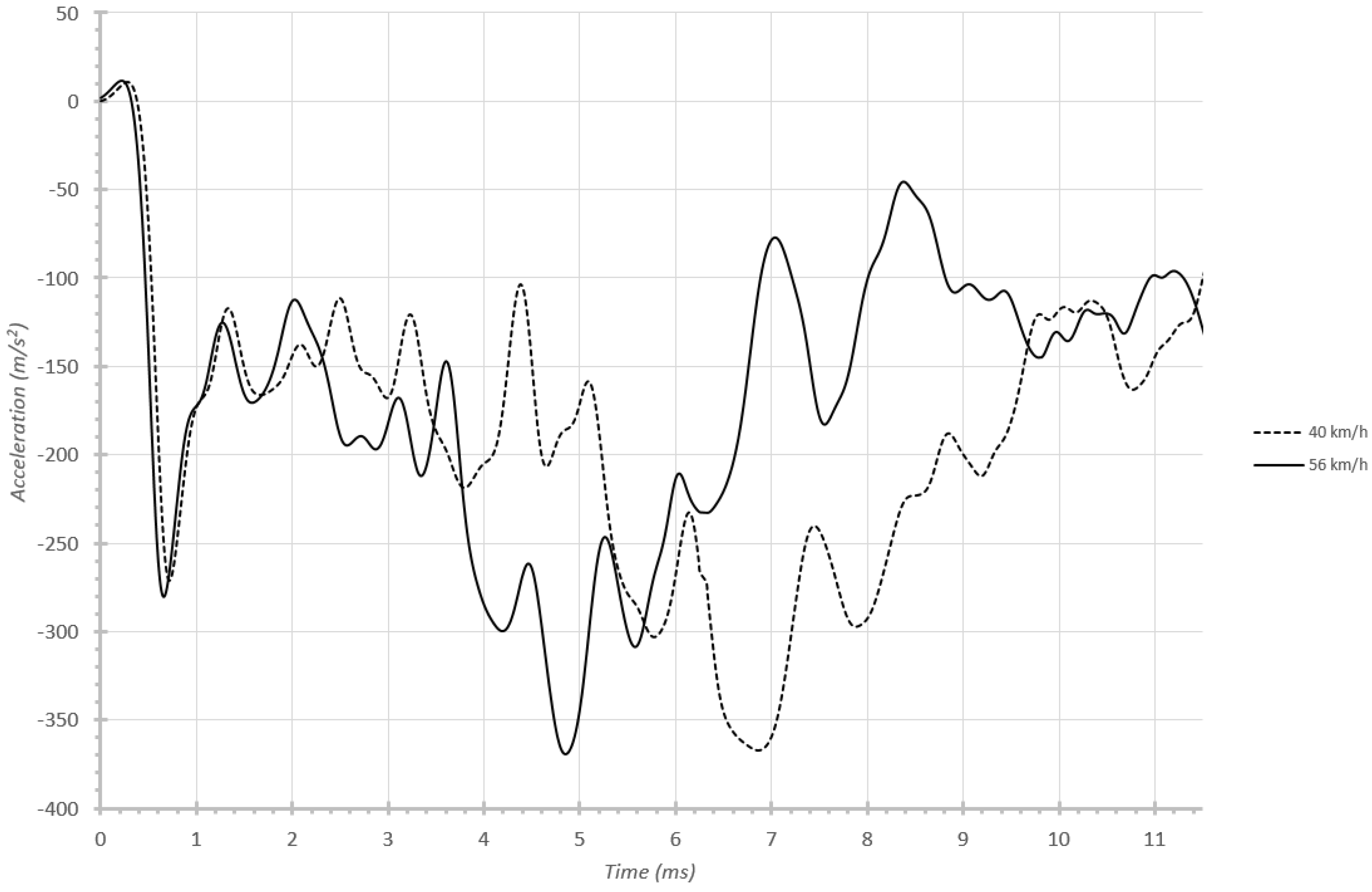
6.2. Behaviour at Different Velocities
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vangi, D. Energy loss in vehicle to vehicle oblique impact. Int. J. Impact Eng. 2009, 36, 512–521. [Google Scholar] [CrossRef]
- Mizuno, K.; Arai, Y.; Hosokawa, N.; Hollowell, W. The Crashworthiness of Minicars in Frontal Impacts. In Proceedings of the 23rd International Technical Conference on the Enhanced Safety of Vehicles; Korea, 27–30 May 2013. Paper no 13-0255. Available online: http://www-nrd.nhtsa.dot.gov/pdf/ESV/esv23/23ESV-000255.pdf (accessed on 28 September 2015).
- Registration of ultra-mobility vehicles. Retrieved from Ministry of Land Infrastructure, Transport and Tourism (MLIT). 2012. Available online: http://www.mlit.go.jp/common/000230555.pdf (accessed on 28 September 2015). (In Japanese)
- Gwehenberger, J.; Reinkemeyer, C.; Kühn, M. Sicherheitsrisikos von leichtkraftfahrzeugen. Verkehrsunfall und Fahrzeugtechnik (VKU) 2008, 46, 144–149. (In German) [Google Scholar]
- Performance as Test Procedures of the PDB and ODB Tests for the Light and Heavy Cars, Informal document no GRSP-45-16. In Proceedings of the 5th Meeting of the Informal Group on Frontal Impact, UNECE, Geneva, Switzerland, 25 May 2009; Available online: http://www.unece.org/fileadmin/DAM/trans/doc/2009/wp29grsp/GRSP-45-16e.pdf (accessed on 28 September 2015).
- Tran, T.N.; Hou, S.; Han, X.; Chau, M.Q. Crushing analysis and numerical optimization of angle element structures under axial impact loading. Compos. Struct. 2015, 119, 422–435. [Google Scholar] [CrossRef]
- Alghamdi, A.A.A. Collapsible impact energy absorbers: An overview. Thin Wall Struct. 2001, 39, 189–213. [Google Scholar] [CrossRef]
- Zhang, X.W.; Tian, Q.D.; Yu, T.X. Axial crushing of circular tubes with buckling initiators. Thin Wall Struct. 2009, 47, 788–797. [Google Scholar] [CrossRef]
- Witteman, W.J. Improved Vehicle Crashworthiness Design by Control of the Energy Absorption for Different Collision Situations. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, Holland, 15 June 1999. [Google Scholar]
- De Santis, F. The Modelling of the Vehicle Frontal Structure and the Numerical Simulation of the Crash-Test. Master’s Thesis, Politecnico di Torino, Torino, Italy, 14 April 1996. [Google Scholar]
- Leeuwen, O.L. Numerical Crashworthiness Design: Advanced Longitudinal Members in Frontal Vehicle Model (Internal report WOC/VT/R/97.47.). Master’s Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 30 April 1997. [Google Scholar]
- Hardy, B.; Carroll, J.; Pitcher, M. Comparison of safety requirements in quadricycles and cars. Transport Research Laboratory (TRL) (Report number PPR669): Berkshhire, UK, 2009; Available online: http://www.trl.co.uk/reports-publications/trl-reports/report/?reportid=6934 (accessed on 30 July 2015).
- Safety Campaign of Euroncap. Safety of Quadricycles; Euroncap: Brussels, Belgium, 2014; Available online: http://www.euroncap.com/en/vehicle-safety/safety-campaigns/2014-quadricycles-tests/ (accessed on 28 September 2015).
- Abdel-Nasser, Y.A. Frontal crash simulation of vehicles against lighting columns using FEM. Alexandria Eng. J. 2013, 52, 295–299. [Google Scholar] [CrossRef]
- Ferreira, V.; Santos, L.P.; Franzen, M.; Ghouati, O.O.; Simoes, R. Improving FEM crash simulation accuracy through local thickness estimation based on CAD data. Adv. Eng. Softw. 2014, 71, 52–62. [Google Scholar] [CrossRef] [Green Version]
- Moaveni, S. Finite Element Analysis: Theory and Application with ANSYS; Prentice Hall: New York, NY, USA, 2014. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L.; Fox, D.D. The Finite Element Method for Solid and Structural Mechanics; Butterworth-Heinemann: New York, NY, USA, 2013. [Google Scholar]
- Bathe, K.-J. Finite Element Procedures; Prentice Hall: New York, NY, USA, 2014. [Google Scholar]
- Reddy, J.N. An Introduction to Nonlinear Finite Element Analysis: With Applications to Heat Transfe; Fluid Mechanics, and Solid Mechanics, Oxford University Press: New York, NY, USA, 2015. [Google Scholar]
- Courant, R.; Friedrichs, K.; Lewy, H. On the partial difference equations of mathematical physics. IBM J. Res. Develop. 1967, 11, 215–234. [Google Scholar] [CrossRef]
- Keeler, S.; Kimchi, M. Advanced High Strength Steel (AHSS), Application Guidelines Version 5.0; World Auto Steel: Brussels, Belgium, 2014; Available online: http://309fbf2c62e8221fbaf0-b80c17cbaf20104b072d586b316c6210.r88.cf1.rackcdn.com/AHSS_Guidelines_V5.0_20140514.pdf (accessed on 28 September 2015).
- Marzougui, D.; Samaha, R.R.; Cui, C.; Kan, C.D.; Opiela, K.S. Extended Validation of the Finite Element Model for the 2010 Toyota Yaris Passenger Sedan. The George Washington University: Ashburn, GA, USA, 2012. Working Paper NCAC 2012-W-005. Available online: http://www.ncac.gwu.edu/research/pubs/NCAC-2012-W-005.pdf (accessed on 28 September 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
López Campos, J.Á.; Segade Robleda, A.; Vilán Vilán, J.A.; García Nieto, P.J.; Blanco Cordero, J. Study of a Steel’s Energy Absorption System for Heavy Quadricycles and Nonlinear Explicit Dynamic Analysis of its Behavior under Impact by FEM. Materials 2015, 8, 6893-6908. https://doi.org/10.3390/ma8105345
López Campos JÁ, Segade Robleda A, Vilán Vilán JA, García Nieto PJ, Blanco Cordero J. Study of a Steel’s Energy Absorption System for Heavy Quadricycles and Nonlinear Explicit Dynamic Analysis of its Behavior under Impact by FEM. Materials. 2015; 8(10):6893-6908. https://doi.org/10.3390/ma8105345
Chicago/Turabian StyleLópez Campos, José Ángel, Abraham Segade Robleda, José Antonio Vilán Vilán, Paulino José García Nieto, and Javier Blanco Cordero. 2015. "Study of a Steel’s Energy Absorption System for Heavy Quadricycles and Nonlinear Explicit Dynamic Analysis of its Behavior under Impact by FEM" Materials 8, no. 10: 6893-6908. https://doi.org/10.3390/ma8105345