1. Introduction
Concrete is a material commonly used in the construction industry. Especially the combination of concrete and steel reinforcement results in many advantages. During the lifespan of a concrete structure, the appearance of cracks in the structure is very typical. Those cracks are either intentional or due to environmental influences, increased loads, aging or local failure. Regular inspections and assessments are therefore very important to ensure the functionality of concrete structures. In addition to regular visual inspections, permanent structural health monitoring techniques are increasingly used. Established techniques use, for example, strain gauges on concrete and steel.
Coda wave interferometry (CWI) is a rather novel monitoring and damage detection technique applicable to concrete. It is based on elastic waves and originates from geophysics, more precisely, seismology. Larose and Hall [
1] were one of the first to apply the technique to concrete and Planes and Larose [
2] give a good review on CWI in concrete. The application of CWI to concrete is possible due to the high heterogeneity of the material that creates scattering. This increases the area to which a signal is sensitive and additionally increases the sensitivity to very small changes. The CWI is based on the principle that signals with their diffuse tail created by the scattering can be reproduced. When evaluating a signal, it is compared to a reference signal. As soon as small perturbations appear in the medium, the signal undergoes small changes. An evaluation of these changes in the signal subsequently allows a localization of the cause that are often cracks in the concrete.
For concrete structures, the used signals have a central frequency in the ultrasonic spectrum. Planès and Larose [
2] differ the single scattering regime with frequencies between 20 and 150 kHz and the multiple scattering regime with frequencies between 150 kHz and 1 MHz. In general, an increase of the signal scattering improves the CWI performance. This is accompanied by the use of higher frequencies, which, however, reduces the maximum possible distance between the source and receiver. Larose et al. [
3] and Zhang et al. [
4,
5] have successfully applied CWI for damage detection in real concrete structures with frequencies in the multiple scattering regime. A more recent experiment of Zhan et al. [
6] and Jiang et al. [
7] has conducted a similar, inverse problem based, imaging and successfully detected multiple cracks whose position, however, strongly correlates with the ultrasound sensors that were attached to the surface after cracking. On a structural scale, several groups [
8,
9,
10,
11,
12,
13] have conducted field experiments with CWI and demonstrated the immense potential of the technology based on an signal evaluation but without a damage localization as it is done in the present study. For the monitoring at a very large, structural scale, greater measuring distances are required. Thus, this study tests the use of 60 kHz that in concrete rather belongs to the single scattering regime but based on Fröjd and Ulriksen [
14] should be applicable for CWI in concrete. For this purpose, CWI is applied to a four-point bending test on a reinforced concrete specimen.
In
Section 2, the general principle of CWI is described and two methods for the localization of damage are introduced. A special and novel feature of the first damage localization approach is a substitute model which is based on a finite element simulation. The second approach to damage localization is a very simple, novel technique based on the arithmetic mean, that in contrast to the first approach does not require the solution of an inverse problem an thus is very fast.
Section 3 gives an overview of the experiment with the used test set-up and expected behaviour of the material. Next to ultrasound measurements, strain in a reinforcement bar is measured with fiber optic sensors (FOS). In
Section 4, the CWI data are analysed and a damage localization is performed at different damage states. For the localization, the two used ultrasound based imaging techniques are compared to the FOS data. In the end the damage localization results with CWI at the four-point bending test are discussed.
2. Ultrasound Methods
Coda wave interferometry uses diffuse ultrasound to measure relative changes of a signal compared to a reference state. Those changes are typically created by a change of the concrete’s temperature [
15], moisture [
16] and stresses [
1,
17] that mostly affect the wave speed of the signal but also changes in the propagation medium due to cracks modify the signal [
18]. If none of these changes occur in the medium, signals and their diffuse tails can be reproduced. This study puts a focus on damage detection that requires a CWI specific signal processing described in
Section 2.1 which then allows to localize damage.
2.1. Basics
The central measurement parameter in CWI is a cross-correlation coefficient (CC) that quantifies the similarity of two compared signals. It is computed for a time frame of length
T in the signal
at time
t as following [
19,
20]:
Very often, the
CC is translated into a decorrelation coefficient (
DC) that uses a magnitude from zero to one to describe how large the changes are in a signal. The relation of
CC and
DC is as follows:
The decorrelation of two signals is used for imaging the cause of the signals’ changes. Depending on the used method, the signal is either evaluated in one long time frame or multiple successive shorter time frames. Multiple evaluation windows can evaluate a DC development that tends to increase in later parts of the signal because more random wave paths cross the new scatterer and create different interferences with other wave fronts that all add up to an increased decorrelation. This described increasing development is very characteristic for the relative position of a cause to the source-receiver pair and is modeled by the sensitivity kernel introduced in
Section 2.3. With this substitute model, an inverse problem can then be formulated whose solution localizes the cause of the changes. When evaluating only one time frame per measurement, one DC can be assigned to each measurement pair. With the use of influence areas for each pair (
Section 2.5) the decorrelations can then be mapped on the geometry.
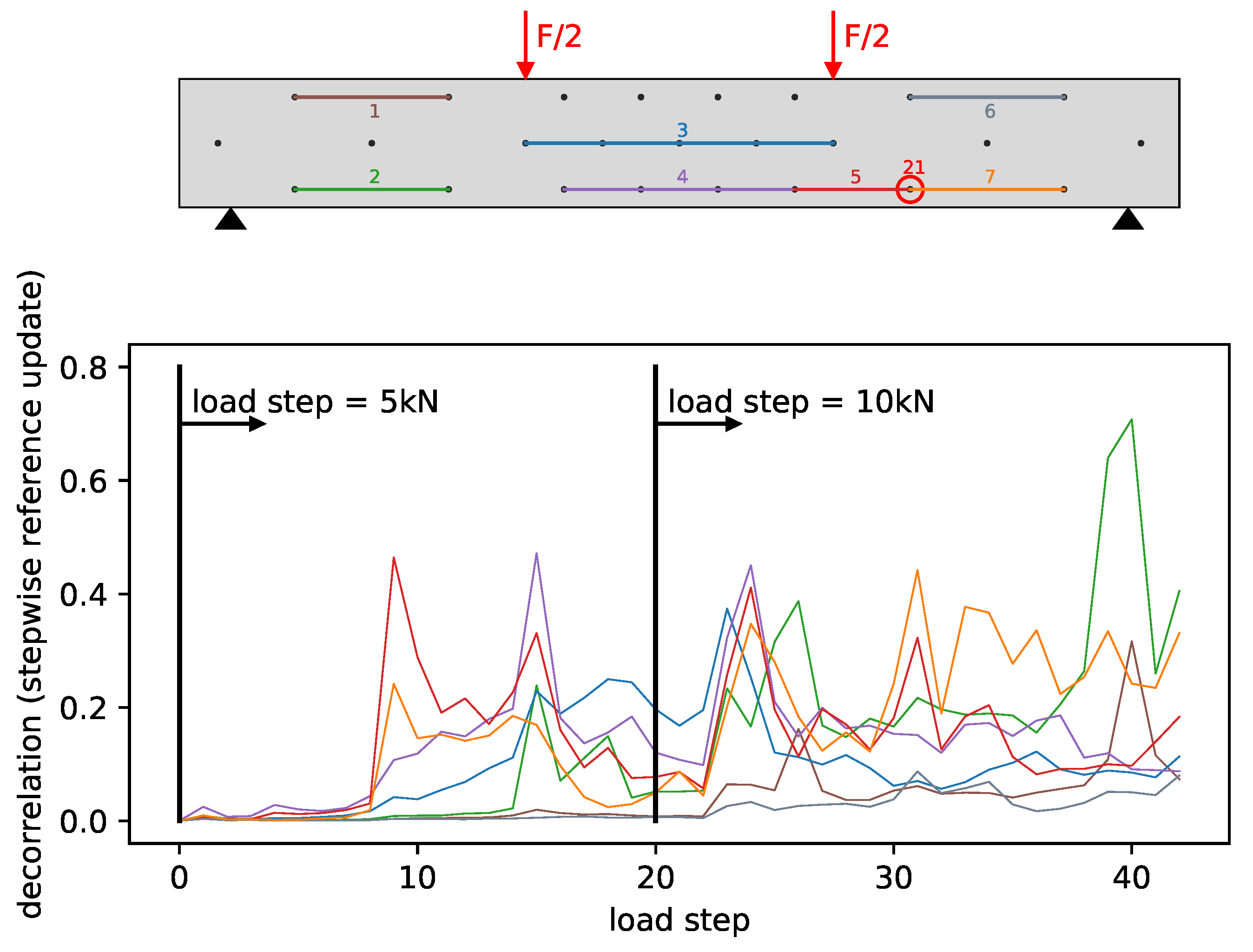
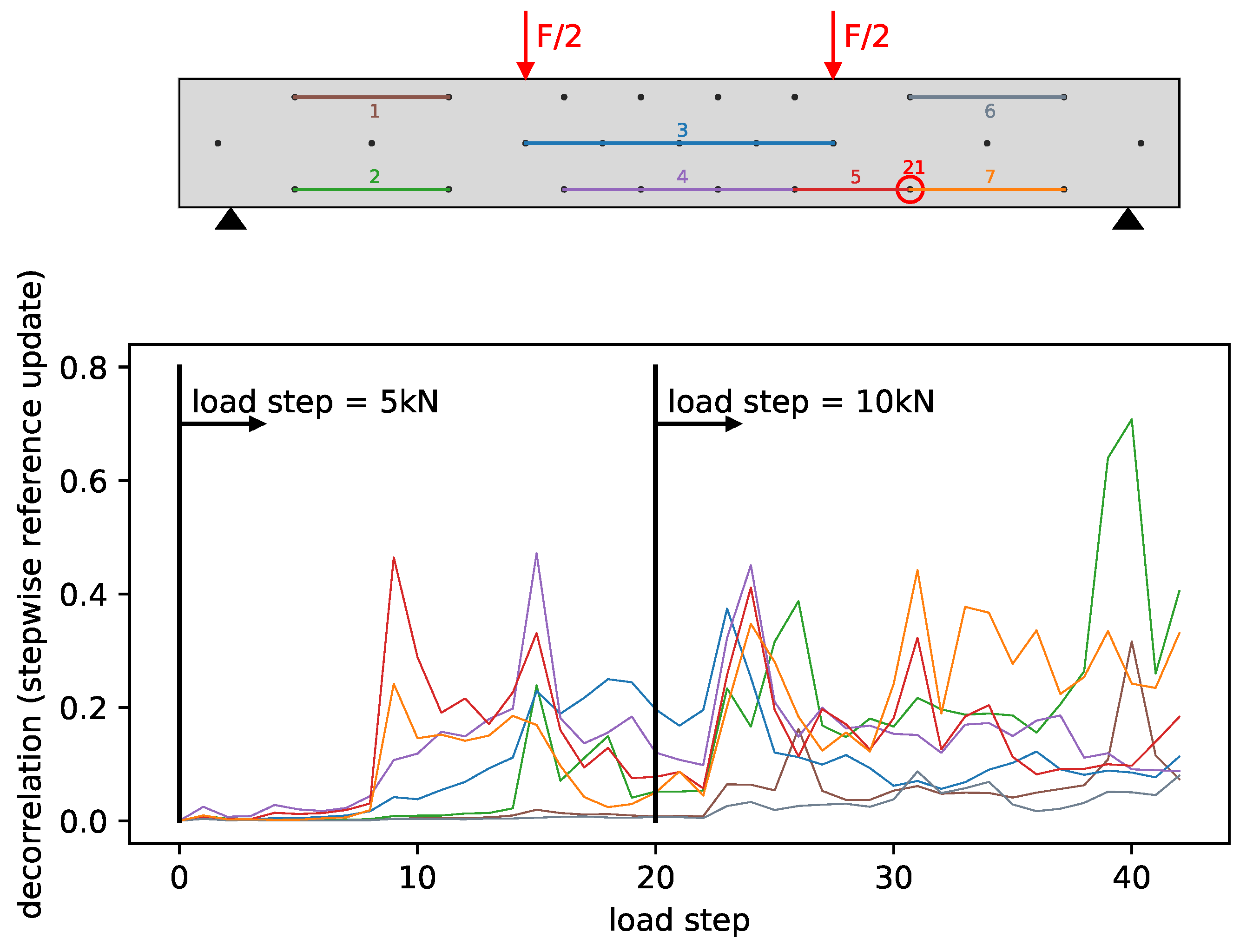
With an ongoing monitoring, there are multiple measurements performed with each pair. For choosing a reference, there are typically two possibilities. One is a fixed reference measurement, e.g., the first one. The other one is a stepwise update of the reference signal such that the used reference is always the previous measurement. The CWI is based on small changes in the signal and a general reproducibility of the signals. This is usually fulfilled with the stepwise updated reference approach but not necessarily with a fixed reference. Thus, the stepwise approach is chosen for this study.
The measured decorrelations are typically created by two slightly different phenomenons. One is a waveform distortion and the other one is a phase-shift of the signal. The phase-shift is created by a change of the signals’ wave speed that is inducted, e.g., by the acoustoelastic effect [
17] that links wave velocity and stresses in the medium. Waveform distortions are typically caused by new scatterers such as cracks. With a focus on damage detection, the impact of phase-shifts on the decorrelation should be minimized by stretching the signal with a stretching factor
. This cancels out the phase-shifts and is done with the technique introduced by Sens-Schönfelder and Wegler [
21]. After stretching, the remaining decorrelation of two compared signals is assumed to be mainly caused by new scatterers such as cracks.
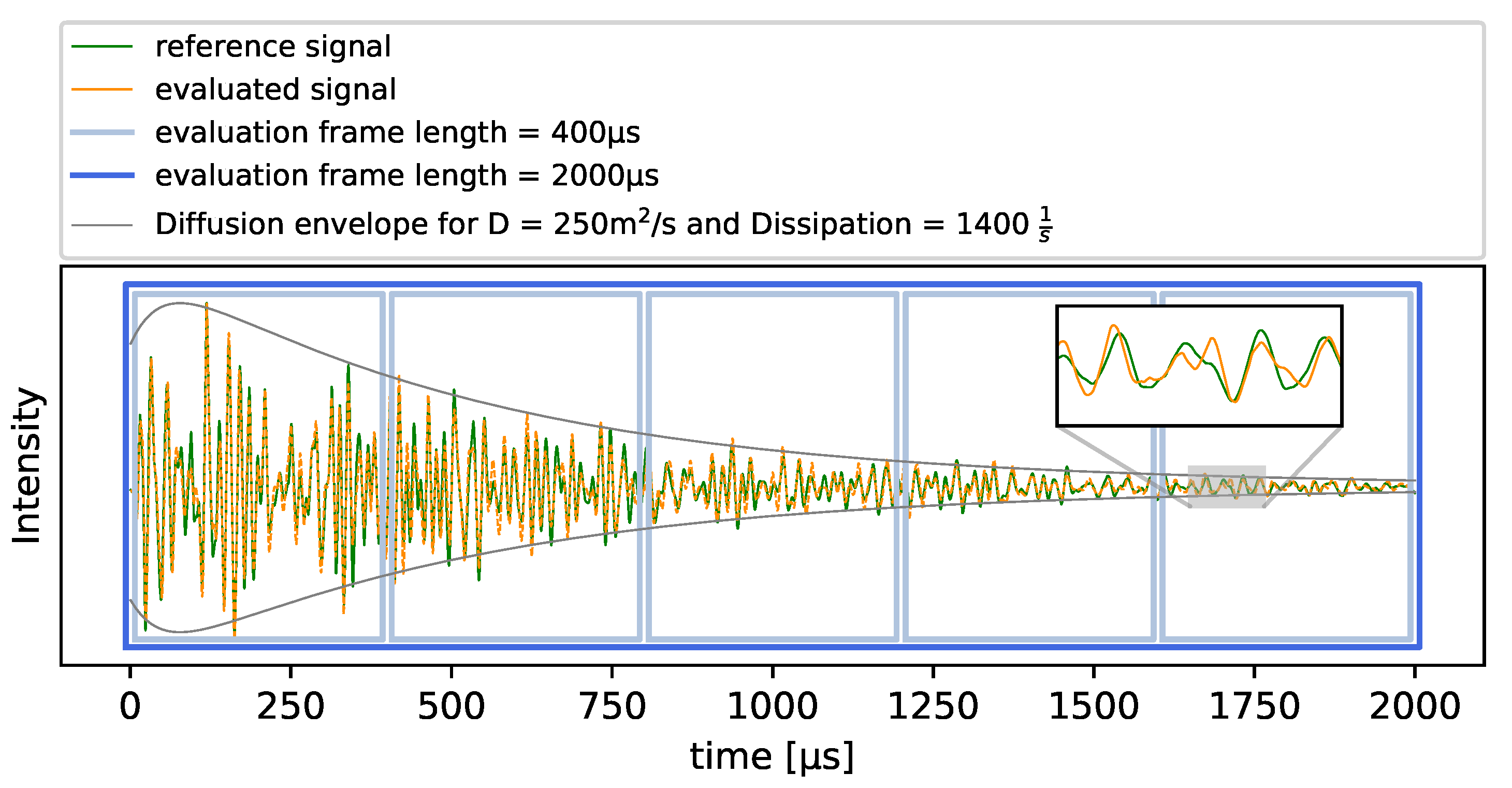
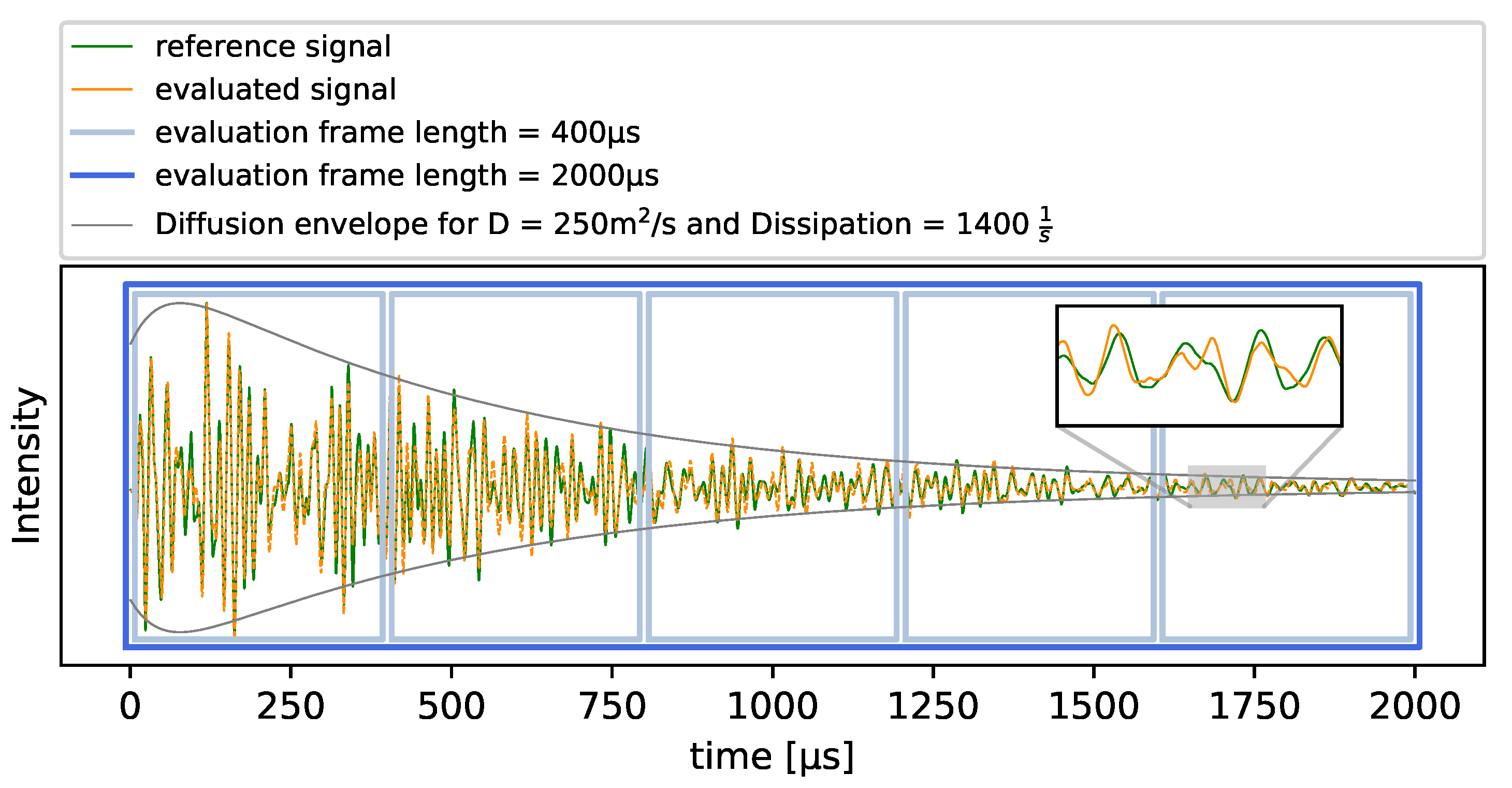
In this study, signals with a length of 2000
after the signals’ time-of-flight (tof) are evaluated. For computing one overall DC of a measurement, the time frame is of length
. When evaluating a DC development within the signal, five successive time frames with length
are used. This is shown in
Figure 1.
2.2. Diffusion Approximation
When thinking of a simulation that resembles the performed experiment, the model would need to contain a heterogeneous material with a very fine refinement in order to represent the used concrete. In addition, the time steps used would have to be very short to achieve numerical stability for an acoustic wave simulation. This causes great computational costs that limit the maximum size of the modeled geometry. Thus, a central simplification is used in the description of how the wave propagates through a heterogeneous medium. As Ryzhik et al. [
22] have shown, the spread of a waves’ energy in a random media as concrete can be approximated with a diffusive spread in a homogeneous medium. This significantly improves computational costs. The main parameter of this approximation that includes the overall scattering behavior of concrete is the diffusivity
D. It can be determined with an envelope fitting of the signal as shown in
Figure 1 where one can see the relation of the complex, diffuse signal and the simple diffusion envelope. Doing so, the mean diffusivity in this study was determined at about 250 m
2/s.
This study uses a novel finite element (FE) based formulation that solves the given problem. The use of FE is a significant difference to previous applications that are usually based on analytical solutions and opens the door to many improvements of the technology. FE and the accompanying use of unstructured meshes allow the problem to be solved for arbitrary, complex-shaped geometries, and the generic FE approach even allows the solution to be further improved by using a different partial differential equation that better approximates the given wave phenomenon. The present study uses the open-source project KRATOS Multiphysics (
www.cimne.com/kratos) for solving the FE problem.
2.3. Sensitivity Kernel
For simulating the actual correlation measurements of two compared signals, a substitute model introduced by Pacheco and Snieder [
23] is used that computes sensitivities of a measurement to a local change. This so called sensitivity kernel describes the possibility that a wave has passed a location
x during a travel time
t from the source
S to the receiver
R and thus describes where a wave got its information from. It is calculated as follows:
In Equation (
3),
stands for the wave intensity which here is equated to the possibility of a wave travelling from
to
in time
t. Instead of an actual wave intensity, the approximation of
Section 2.2 is used and the FE solution of the simulation with KRATOS Multiphysics is inserted for
I. At each position
x the sensitivity kernel gives a development over time that resembles the DC development over the signals’ length in case a scatter is added at the corresponding position
x.
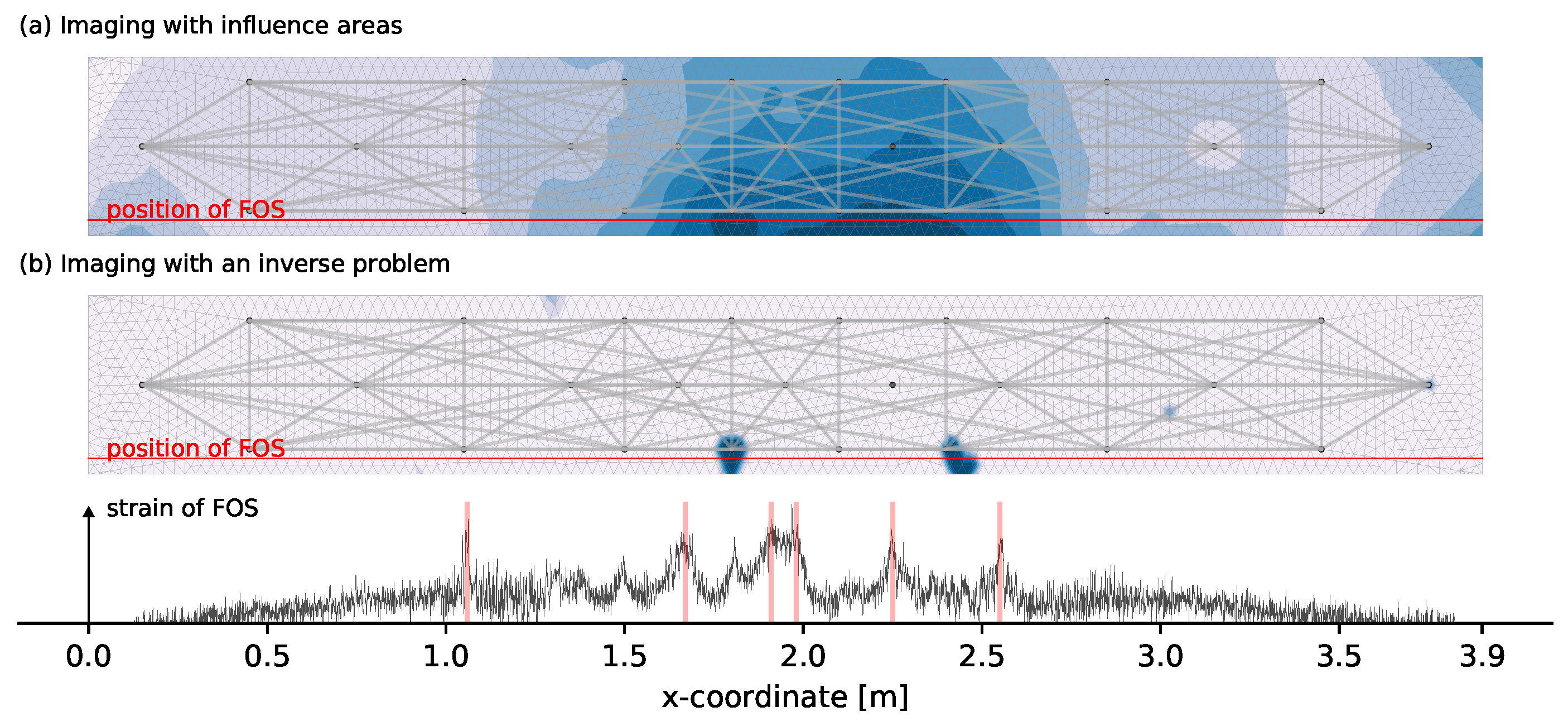
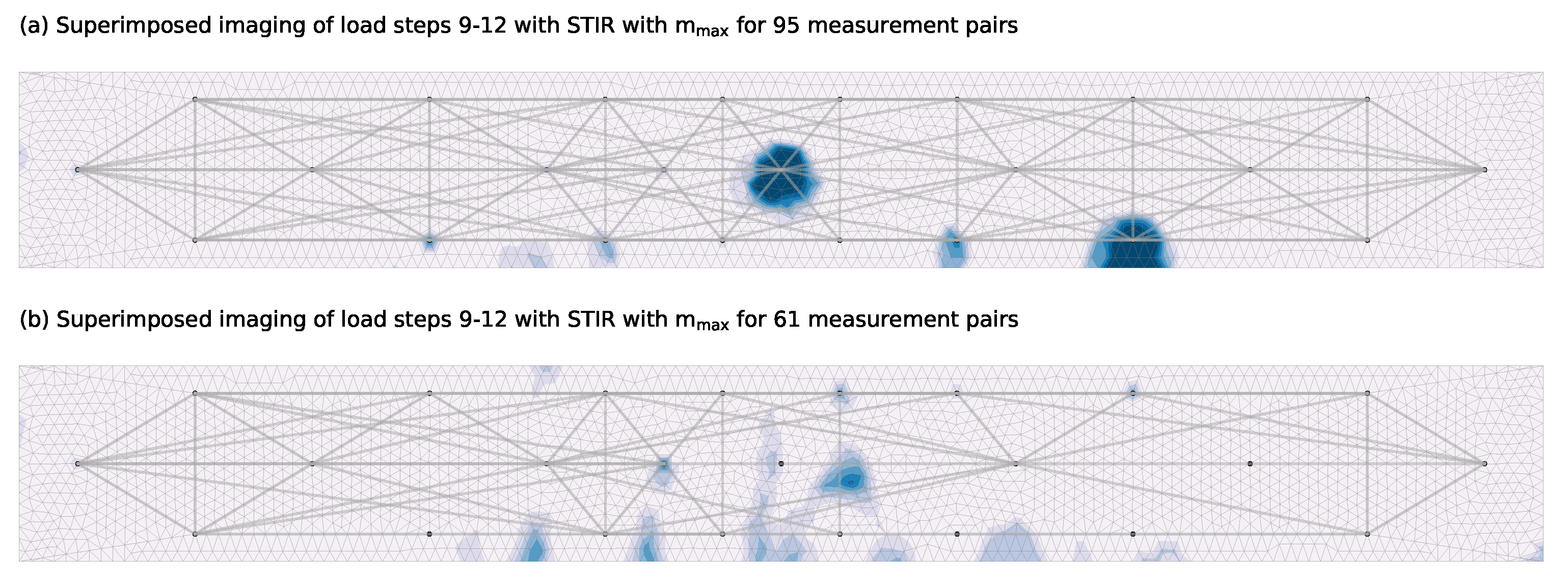
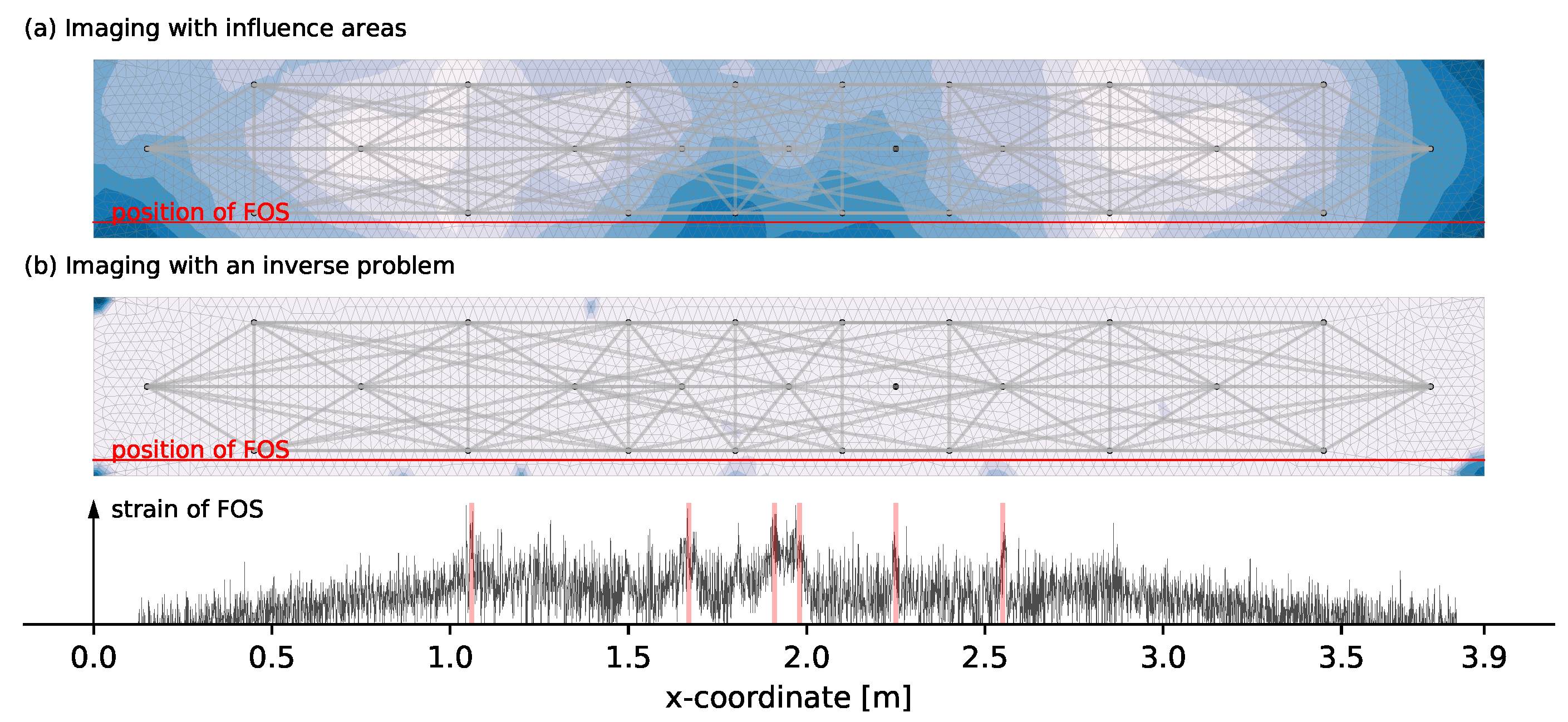
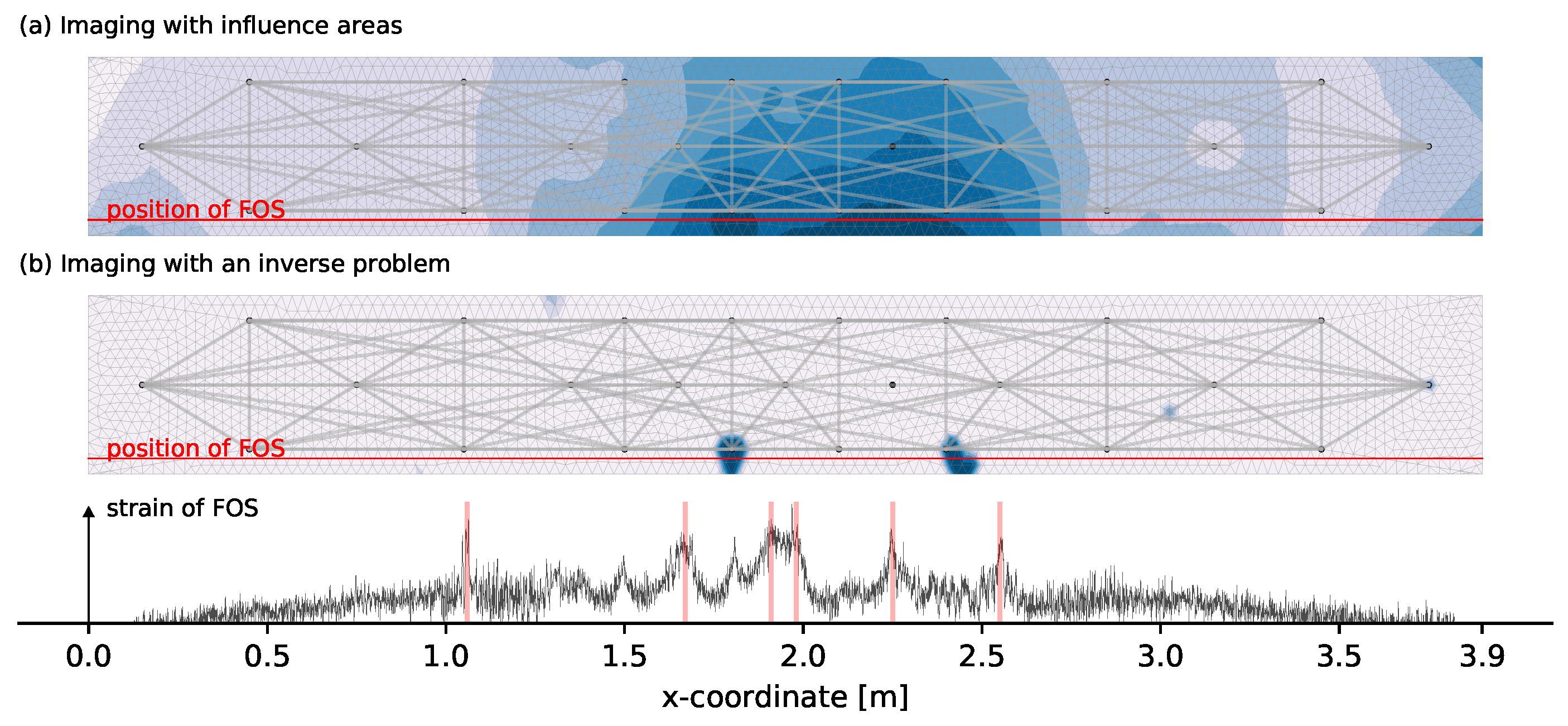
2.4. Imaging with an Inverse Problem
Being able to simulate the DC development for any location
x allows to formulate a problem that, when solved, localizes the cause for the decorrelation. Planès et al. [
24] describes this problem as
where
G is a matrix that contains the sensitivity kernel for one specific measurement pair at a specific time in each row. The vector
d contains the measured decorrelation in the signal with pair and time matching the sensitivity kernel in the corresponding row. The vector
m contains the damage at each node of the mesh and is the unknown in this equation. The size of
G is
n × m with
n referring to the amount of nodes in the mesh and
m referring to the total amount of measurements. Typically the amount of nodes in the mesh is larger than the amount of measurements and thus, the problem is underdetermined. The equation system of Equation (
4) is inconsistent and reformulated to a least-squares optimization problem:
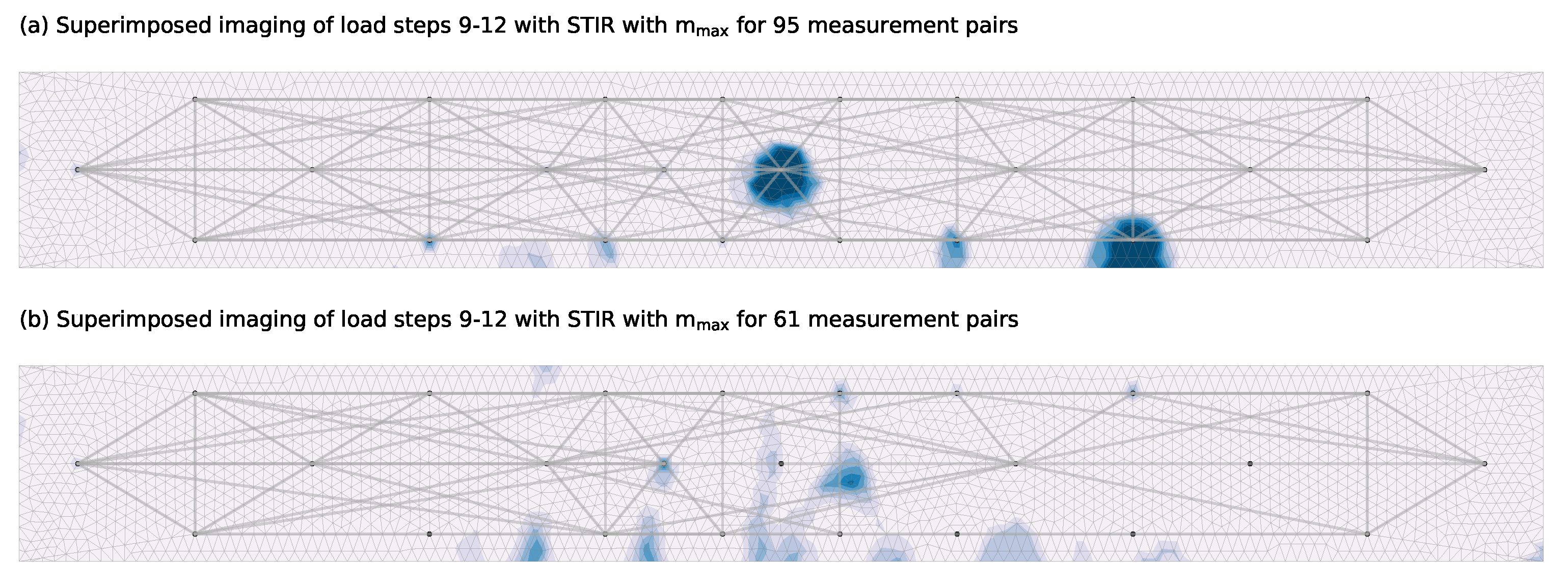
For solving this large-scale ill-posed problem, a trust region reflective algorithm by Branch et al. [
25] called STIR is used in this study. It is referred to as a subspace, interior and conjugate gradient method for bound-constrained minimization problems. Especially the boundary on the variables is very useful since damage effects in the coda signal can only add up (no negative values allowed) and the maximum effect of one node in the mesh should also be limited to
.
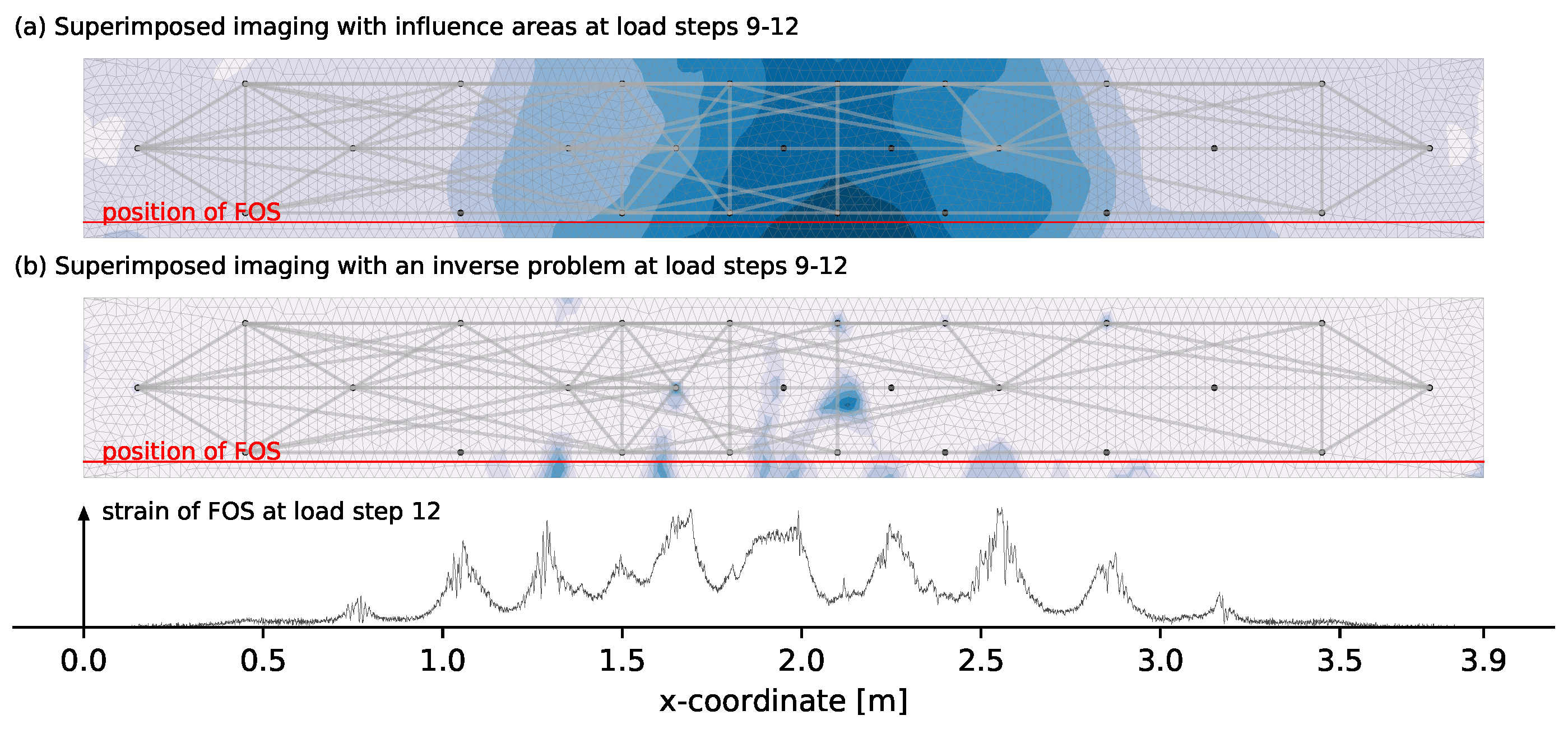
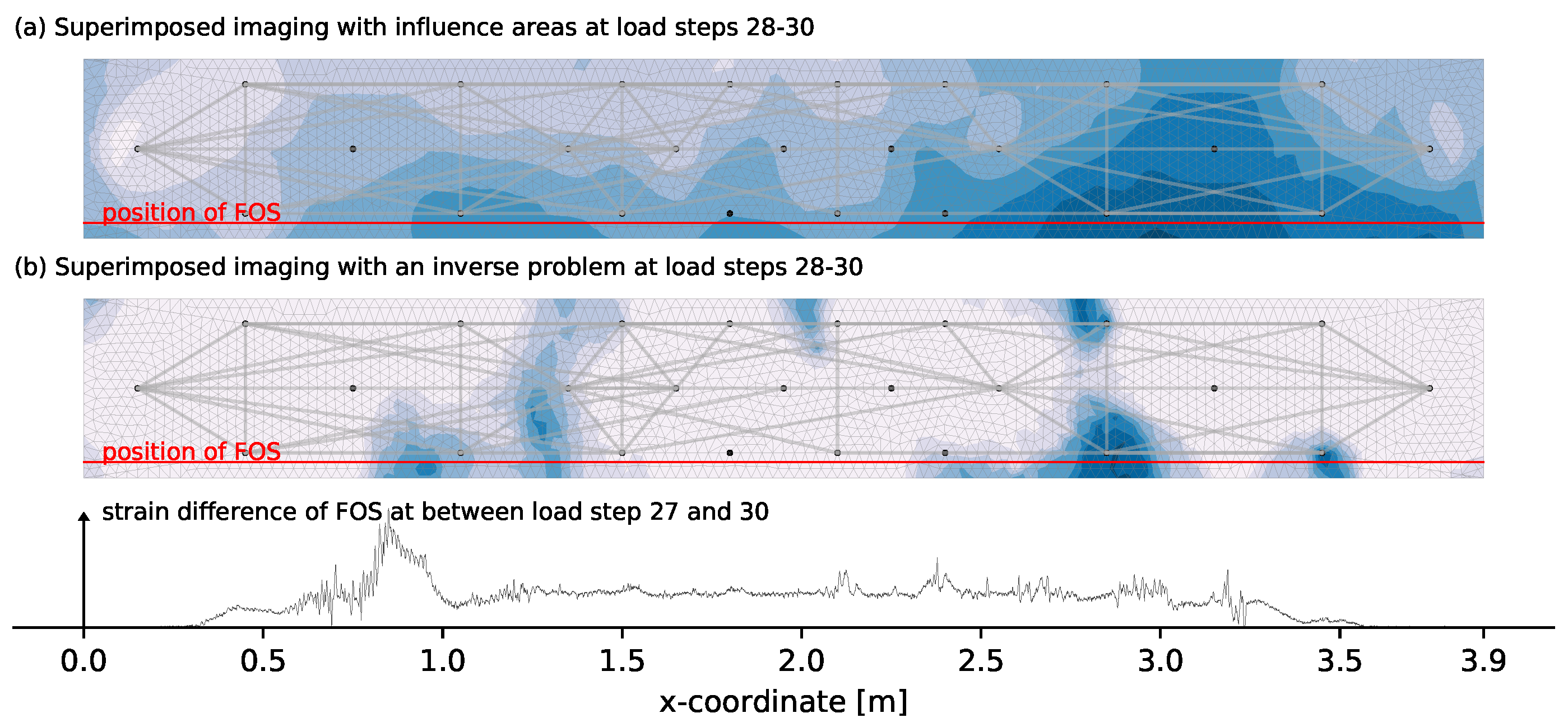
2.5. Imaging with Influence Areas
Next to a simulation that should resemble the DC measurements, a second, simpler approach is used in this study. For this novel approach, an influence area is assigned to each measurement pair. In order to choose such an area, a signals sensitivities computed with the sensitivity kernel are used. The used sensitivity kernel has a source-receiver distance of 30 cm which resembles the typical distance used in the experiment that is introduced in
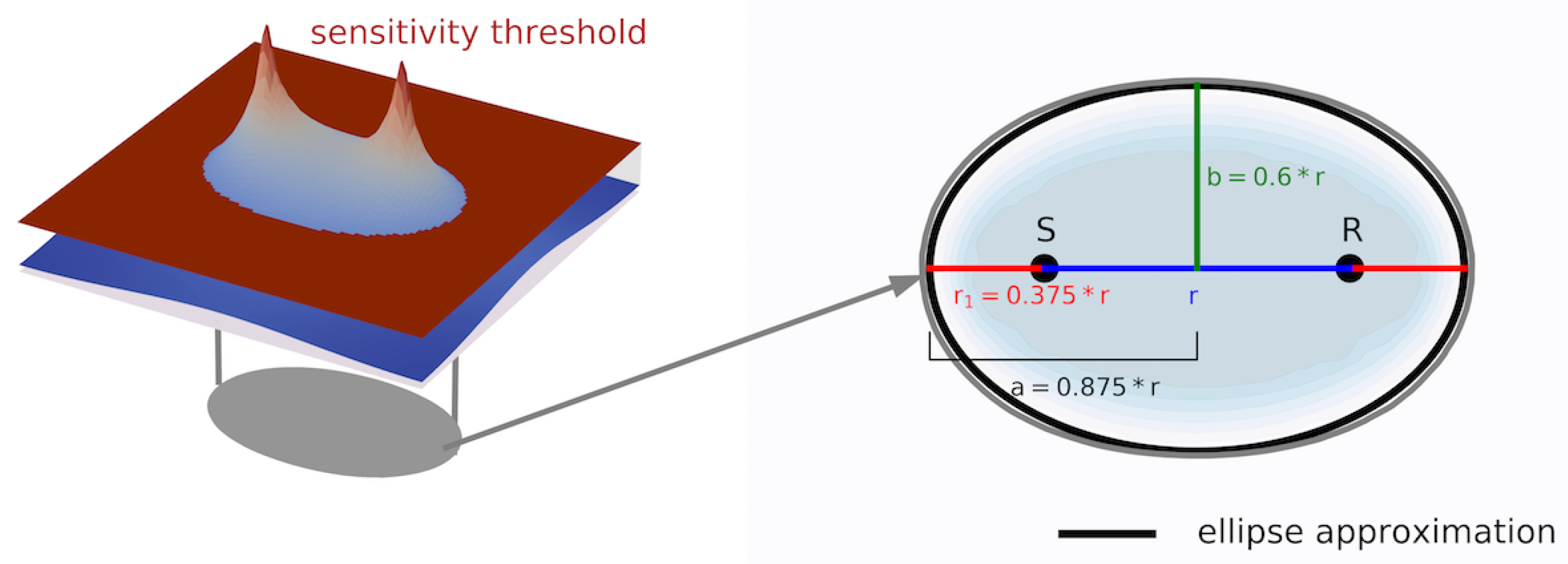
Section 3. However, a different source-receiver distance of the kernel produces a similar looking sensitivity kernel and thus the approach can be used for other source-receiver distances as well. By limiting the sensitivities to a minimum threshold, a nearly elliptical area is obtained. The ellipse is transferred to a generic description that depends on the source-receiver distance
r which is visualized in
Figure 2. In this study, an ellipse with the semi-major axis
, the semi-minor axis
and an eccentricity
is used. The obtained ellipse parameters are depending in the chosen sensitivity threshold which is a free parameter. Thus, the influence areas can be varied in case the obtained imaging has too strong contrasts or if the smoothing is to be reduced. In order to obtain a smooth overlap with other regions, the influence vanishes to the ellipse border, which is indicated by blue on the right of
Figure 2.
With the influence areas, the transfer of measured decorrelation to a spatial representation on the geometry is done with the weighted arithmetic mean. The DC at a position
x is obtained as follows:
where
is the influence of a pair
p at a position
x and
the overall decorrelation per pair evaluated with a frame length
.
3. Experiment
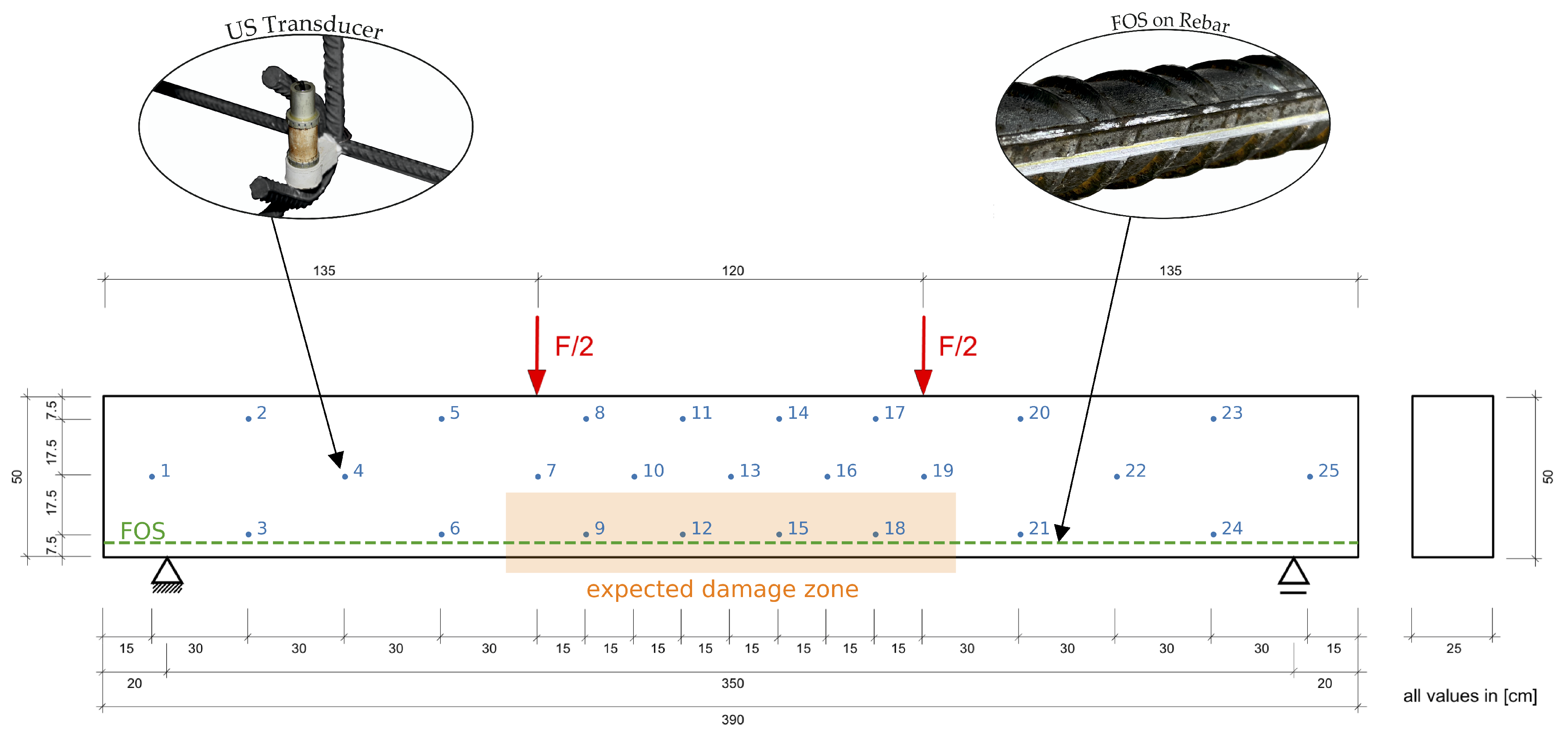
In order to prove the stated imaging on both the inverse problem and the influence areas, a structural test was carried out at the Ruhr University, Bochum, Germany. The reinforced concrete specimen is a beam with a depth of 500 mm, width of 250 mm and length of 3900 mm. Resulting from the loading in a 4-point bending test, flexural reinforcement (3Ø20 mm) as well as staggered stirrup reinforcement (Ø12 mm / 300 mm / 2) are placed. With a field length of 3500 mm (cf.
Figure 3) and a spacing of the two concentrated loads of 1200 mm, this system represents a challenging way to demonstrate imaging. Substantiated by regularly occurring cracks between the concentrated loads. These cracks, which appear in multiplicity, unlike a single very local crack, render it difficult for the algorithm to output detailed predictions. Thus, the system provides a good means to prove the algorithm’s performance.
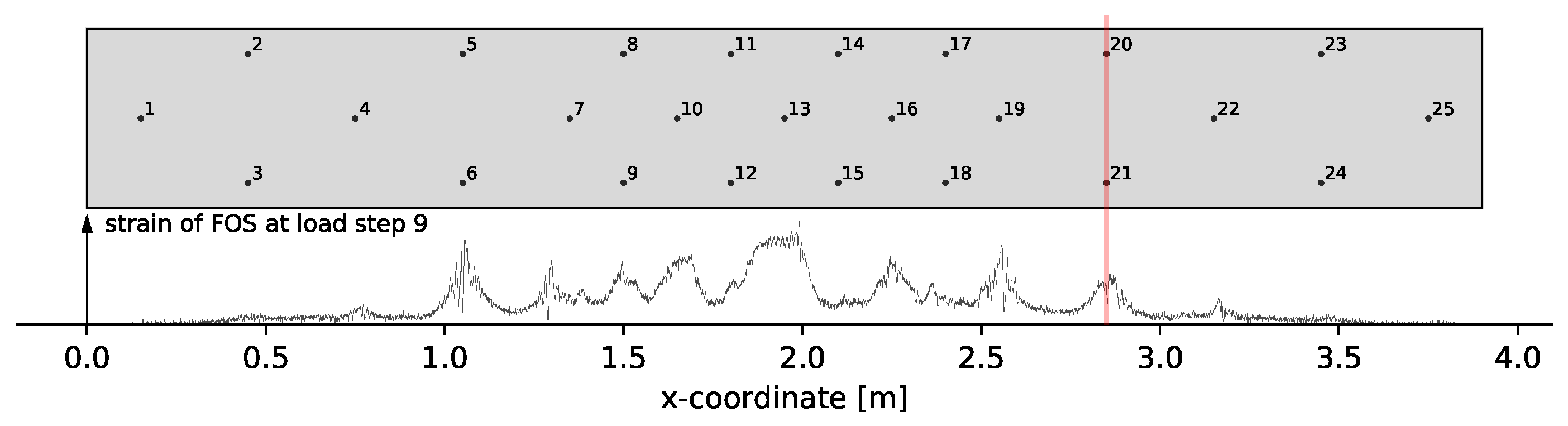
To detect cracks, an ultrasonic signal is intentionally to be guided into the concrete. For this purpose, ultrasonic transducers (SO807 transducers from Acoustic Control Systems, Ltd., Saarbrücken, Germany) embedded in the concrete are arranged in a net-like manner throughout the specimen (cf.
Figure 3). The aim was to cover the whole specimen with the sensor-net to be able to see differences of cracked and intact regions. With expected cracking in the middle third the density of the sensor-net was increased in this part to be able to closer investigate the effects of cracks on different measurement pairs. The transducers, consisting of a piezoceramic cylinder, exhibit a central frequency of approx. 60 kHz. The radiation takes place almost uniformly, perpendicular to the longitudinal axis of the transducer. Cement fasteners are used to attach the transducers to the reinforcement. Due to the similarity of the cement fasteners to the surrounding concrete, the fastener’s influence on the load-bearing behavior can be prevented. During the evaluation process it became evident that transducer 16 is erroneous and thus related measurements were not taken into account.
In addition to ultrasonic measurement technology, FOS were used in particular. The FOS technology provides the possibility to measure strains and temperatures [
26,
27] with high resolution (point distance about 0.65 mm). For this experiment, the Luna ODiSI 6008 fiber optic instrument (Roanoke, TX, USA) was used. A FOS was glued to a rebar (Ø 20 mm). The application of the fiber onto the rebar was realized by the adhesive Polytec PT AC2411 (Karlsbad, Germany). This adhesive proved to be suitable in detailed investigations [
28] into the adhesive and fiber to be used.
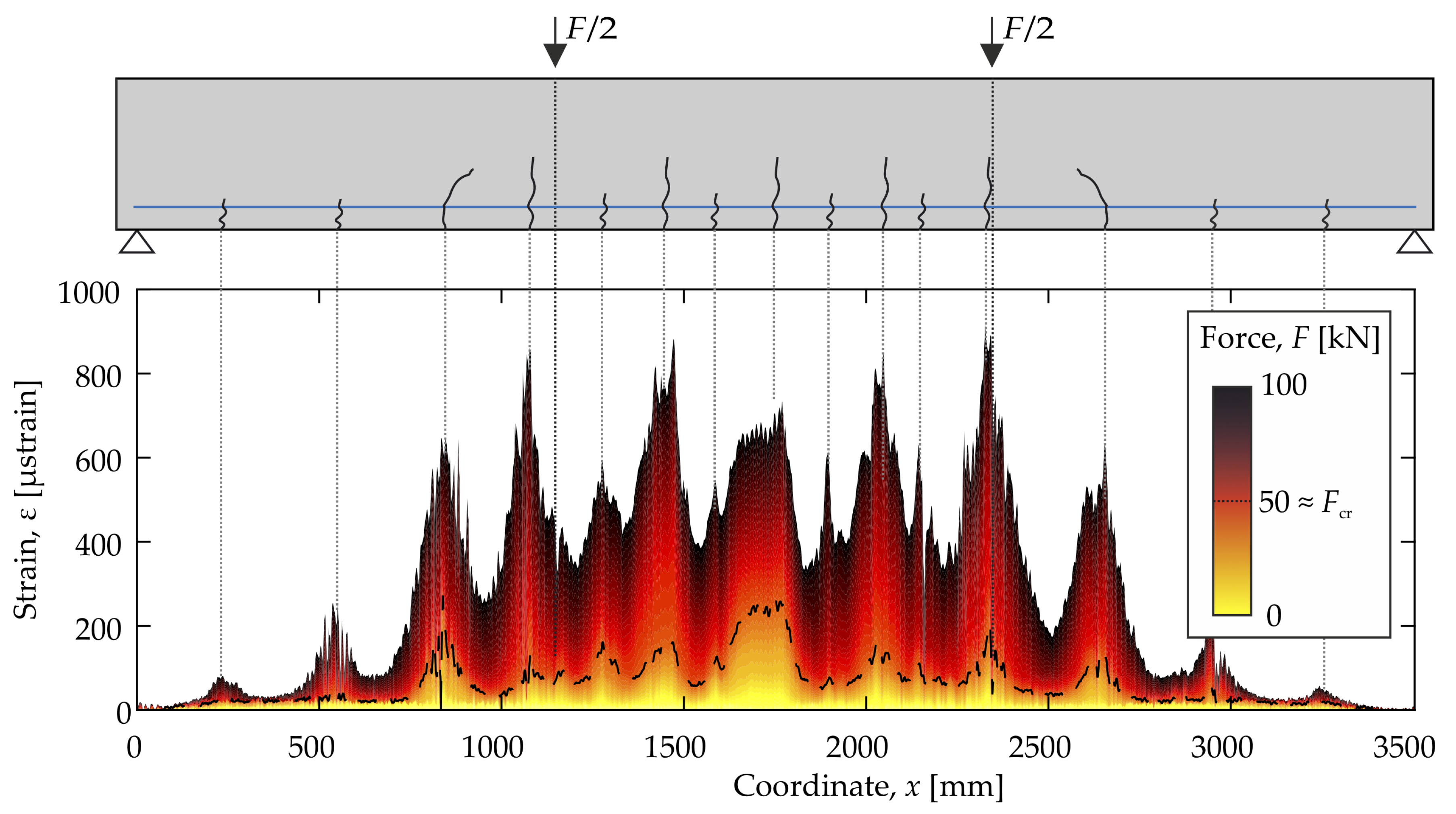
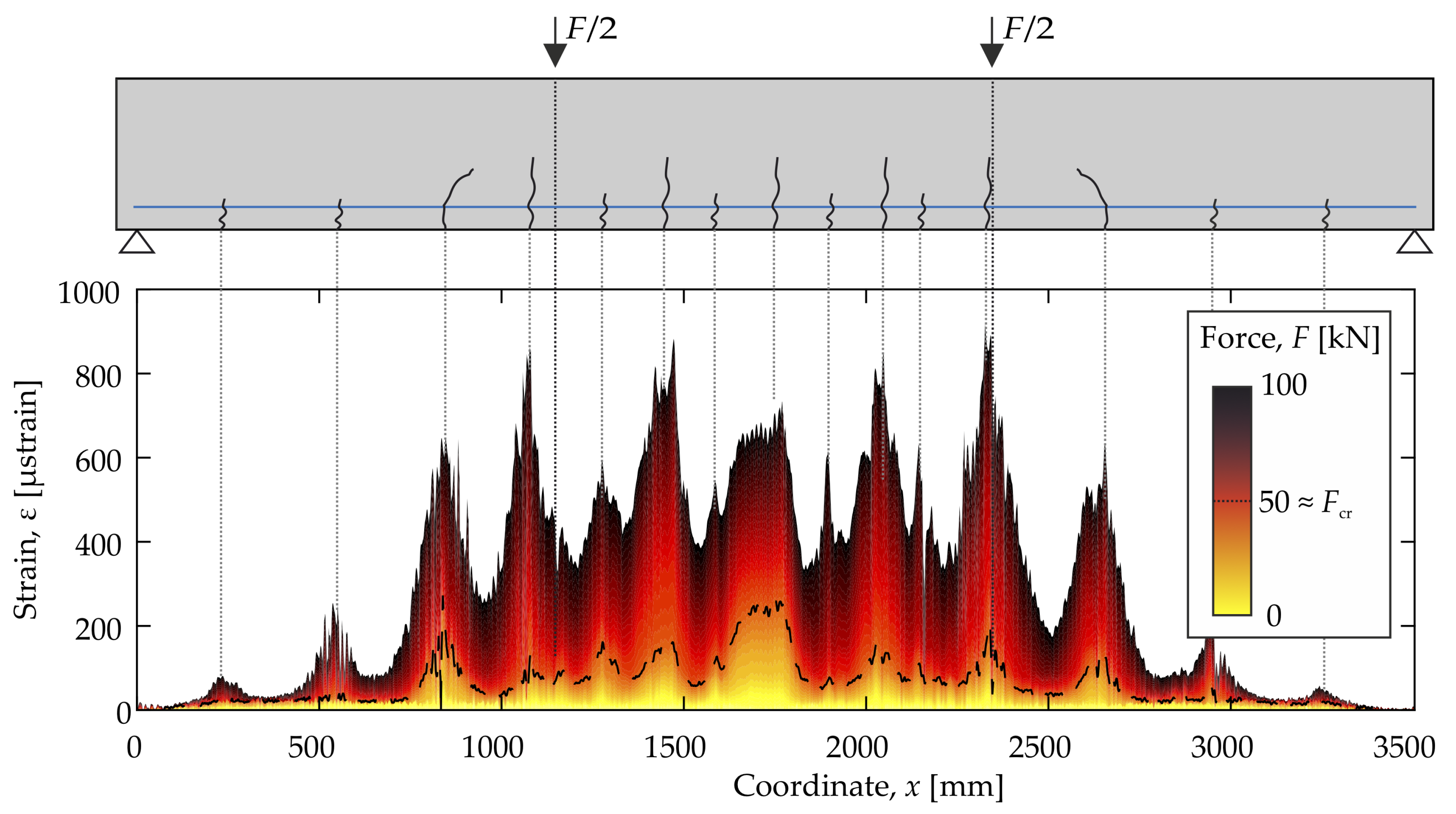
From the very continuity of the fiber optic strain measurement (both temporal and spatial), it becomes evident that a lot of strain data are acquired. The measured strains along the rebar for a load from 0 to 100 kN is shown in
Figure 4. The increasing force is reflected in the (color) profile of the strains.
Due to the low tensile strength of concrete, it cracks even when subjected to a low tensile stress. The tensile strength
given in
Table 1 corresponds to the mean value from three individual samples. Variations around this mean value are a matter of course and, like many other natural processes, can be regarded as a log-normal distribution. Consequently, it is probable that cracking (an excess of the scattering tensile strength) begins earlier than (<
) the given mean value. If concrete cracks, the force, which was previously carried by the entire intact cross-section, is transferred to the reinforcing steel. The strain or stress of the reinforcing steel thus rises in the crack. As the distance to the crack increases, force is transferred back into the concrete via the bonding effect of the reinforcement and the concrete. When sufficient force is again transferred into the concrete and the tensile strength is again exceeded, the next crack forms. With complete formation of the crack pattern (>
), the peaks and valleys in the strain profile shown in
Figure 4 appear. This defining characteristic of the load-bearing behavior of reinforced concrete can be used to capture the development of cracks and serves as a reference for the used ultrasonic measurement technology.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}