
A Unified Current Loop Tuning Approach for Grid-Connected Photovoltaic Inverters


Abstract
:1. Introduction
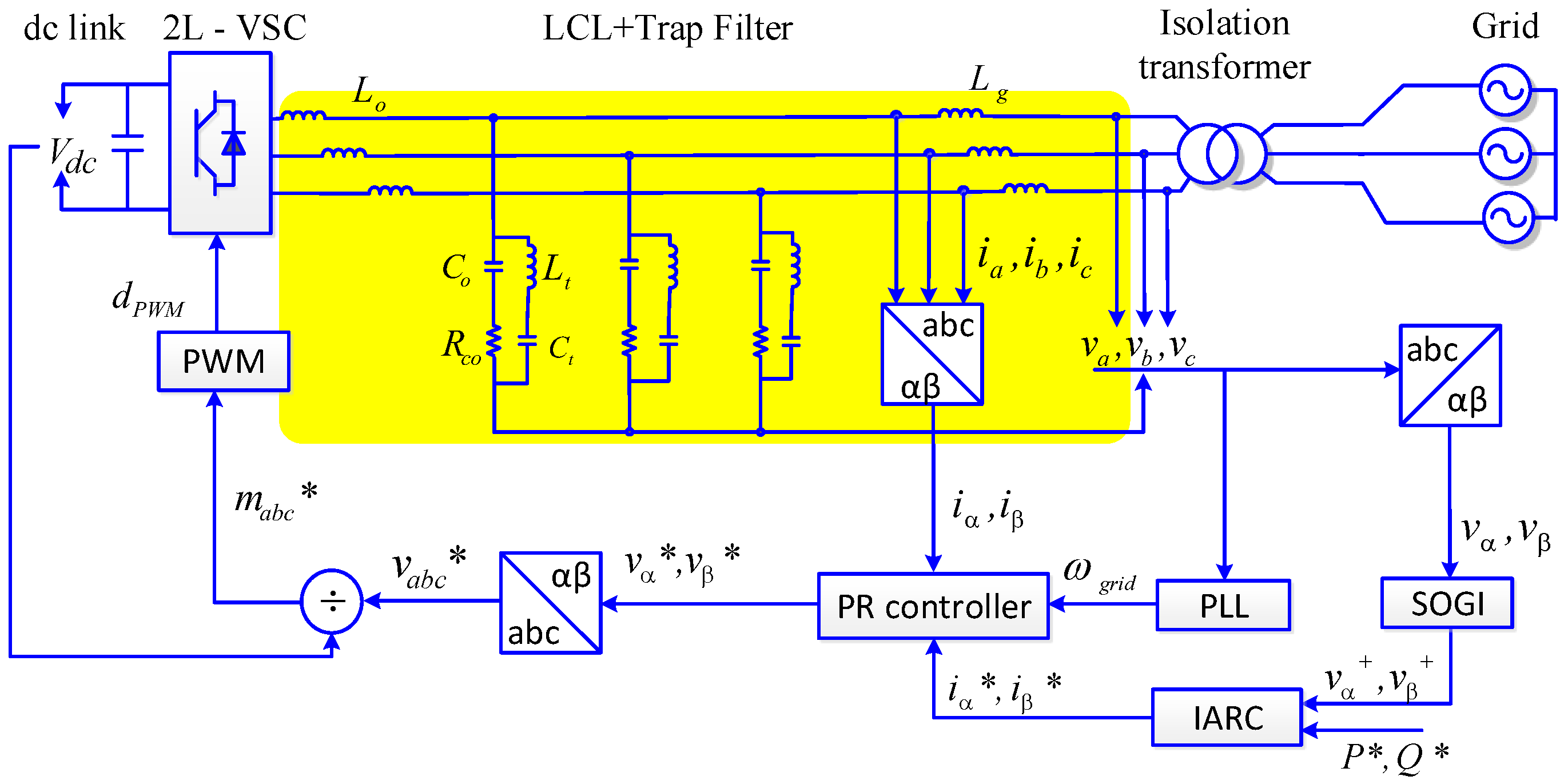
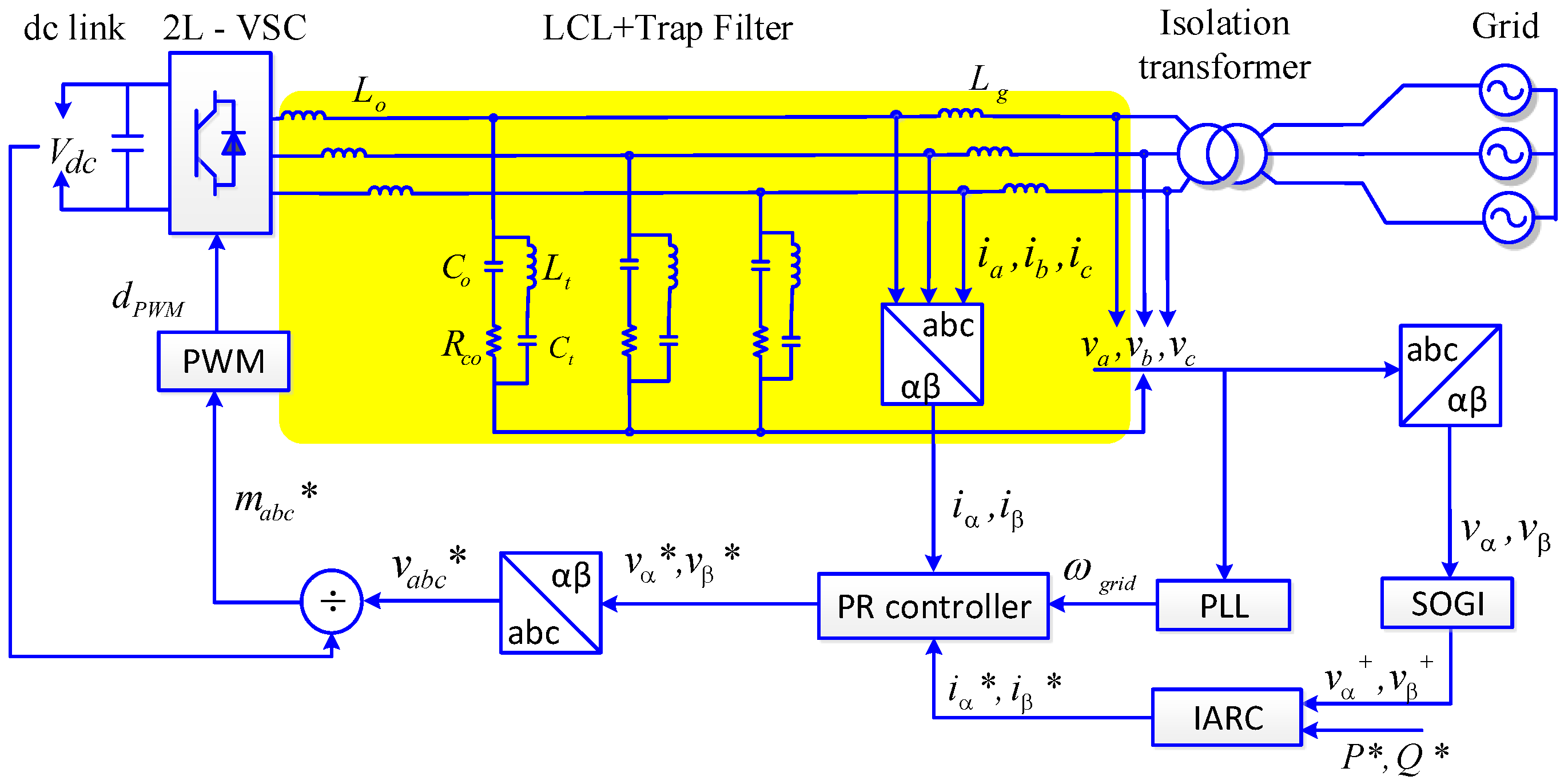
2. Proportional Resonant Controller for Grid-Connected Photovoltaic Inverters
3. Unified Tuning Approach
3.1. Direct Discrete-Time Domain Design
3.2. Calculation of the Controller Gains
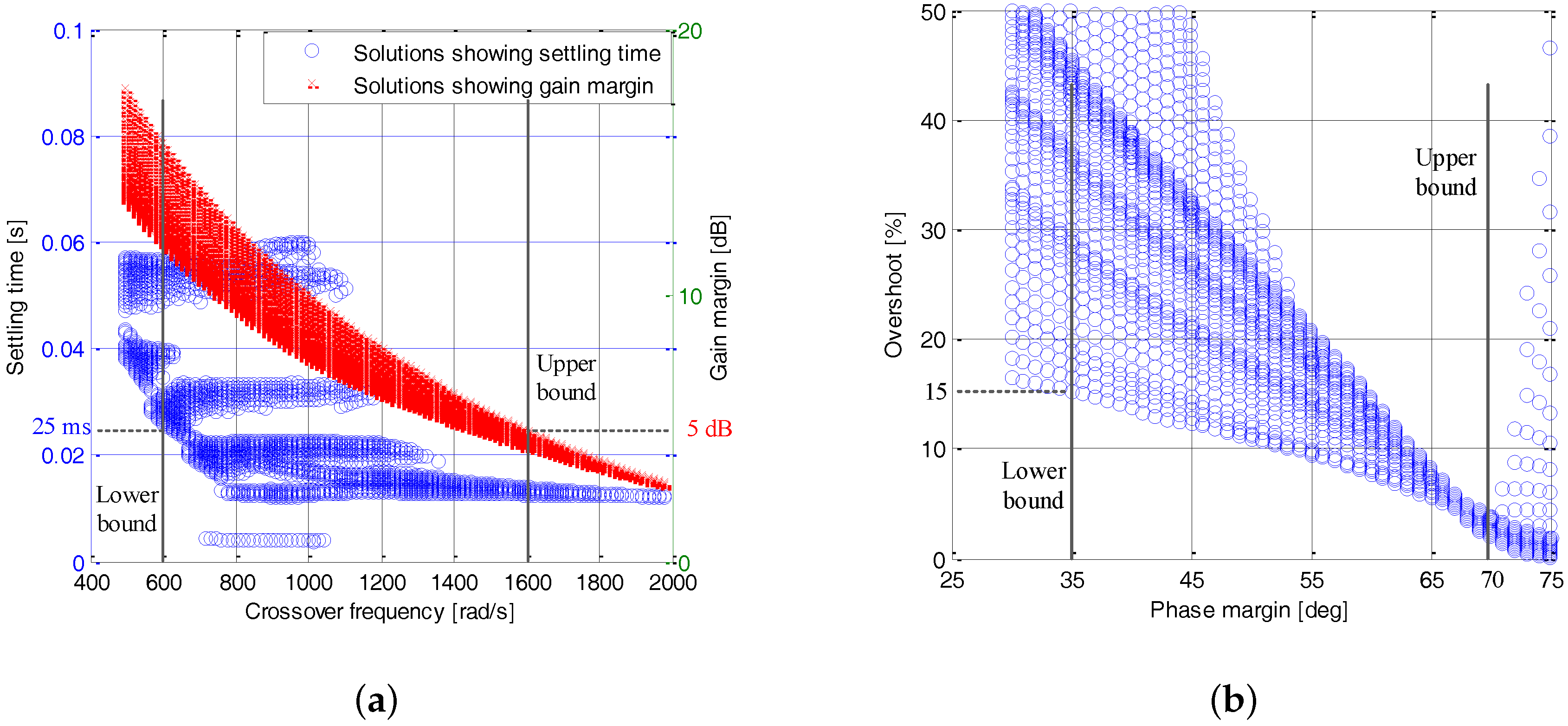
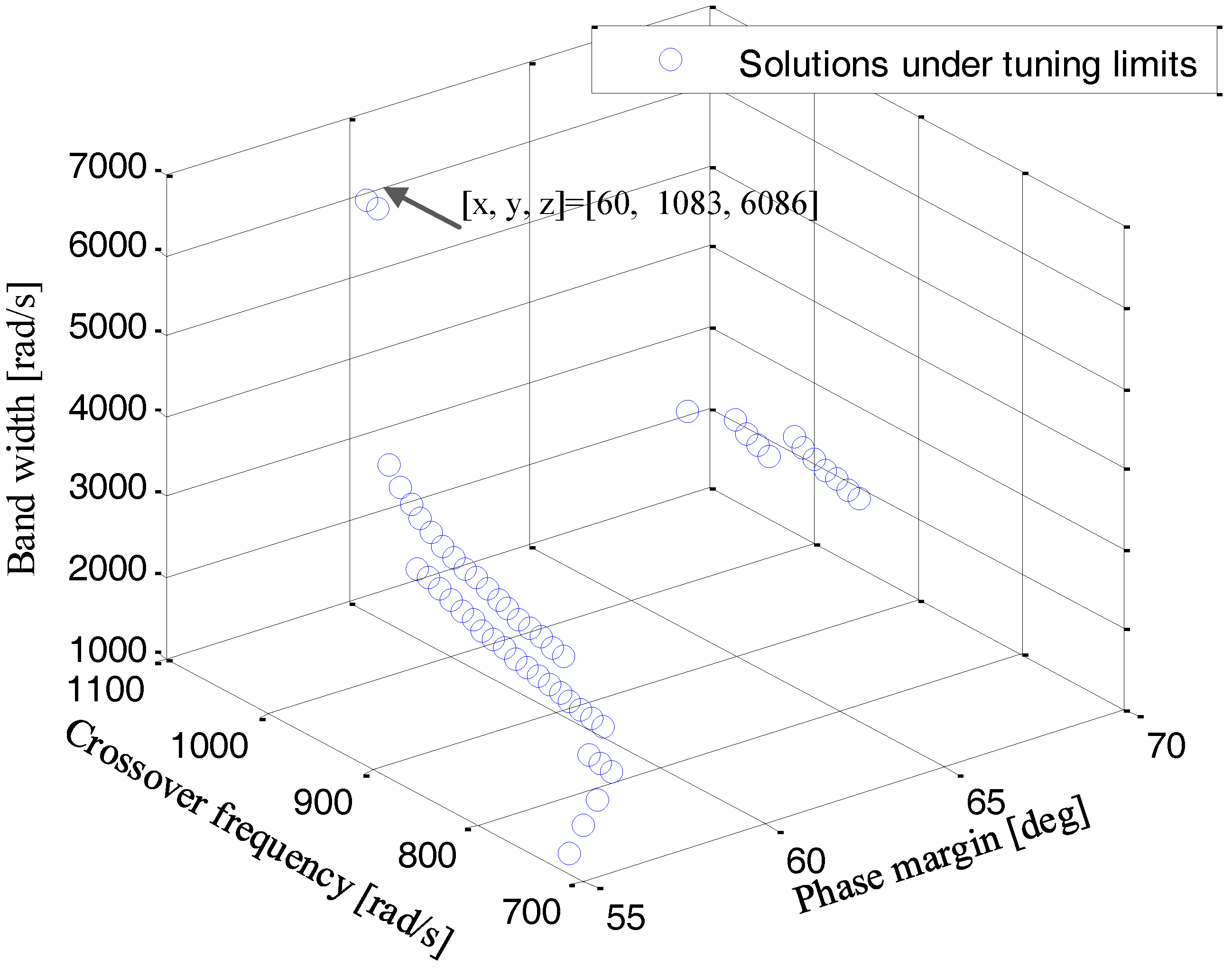
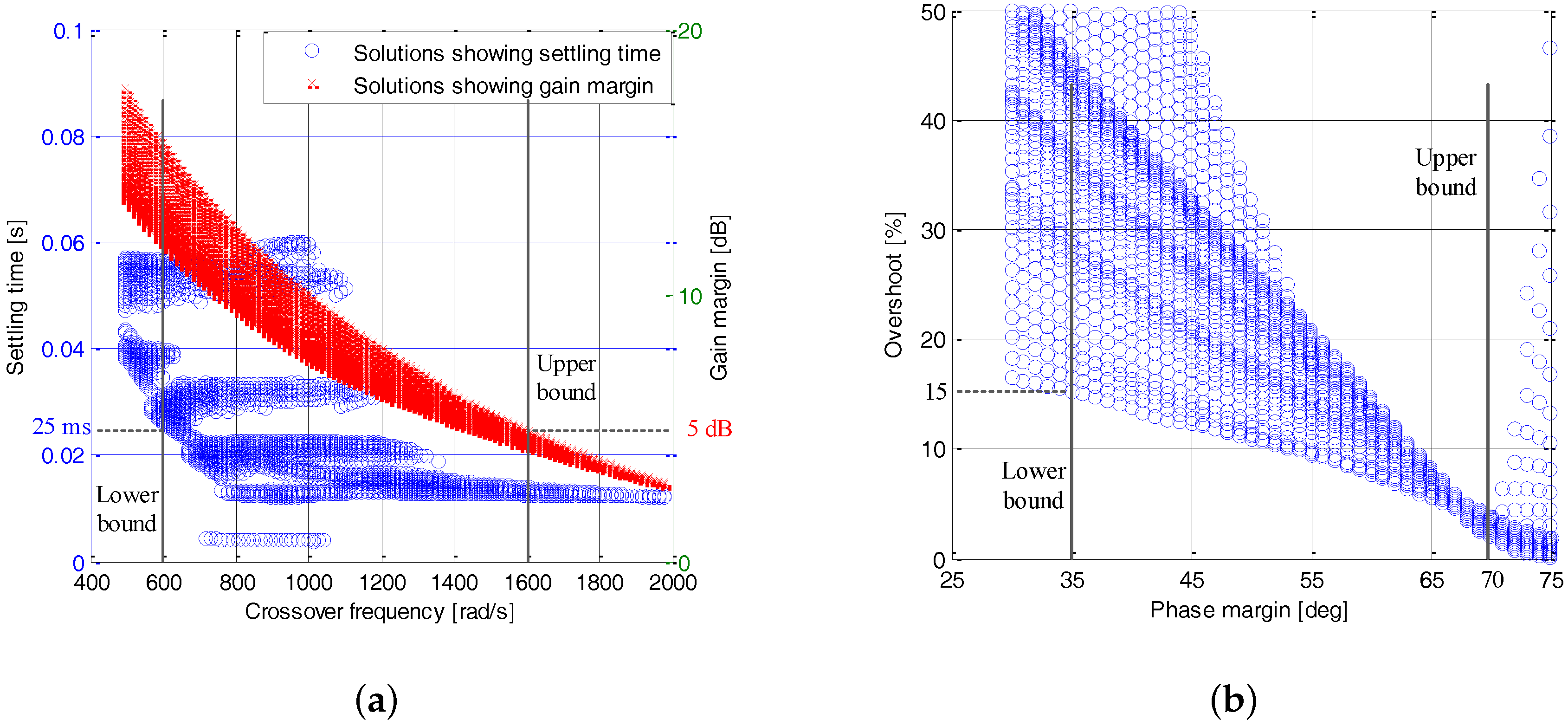
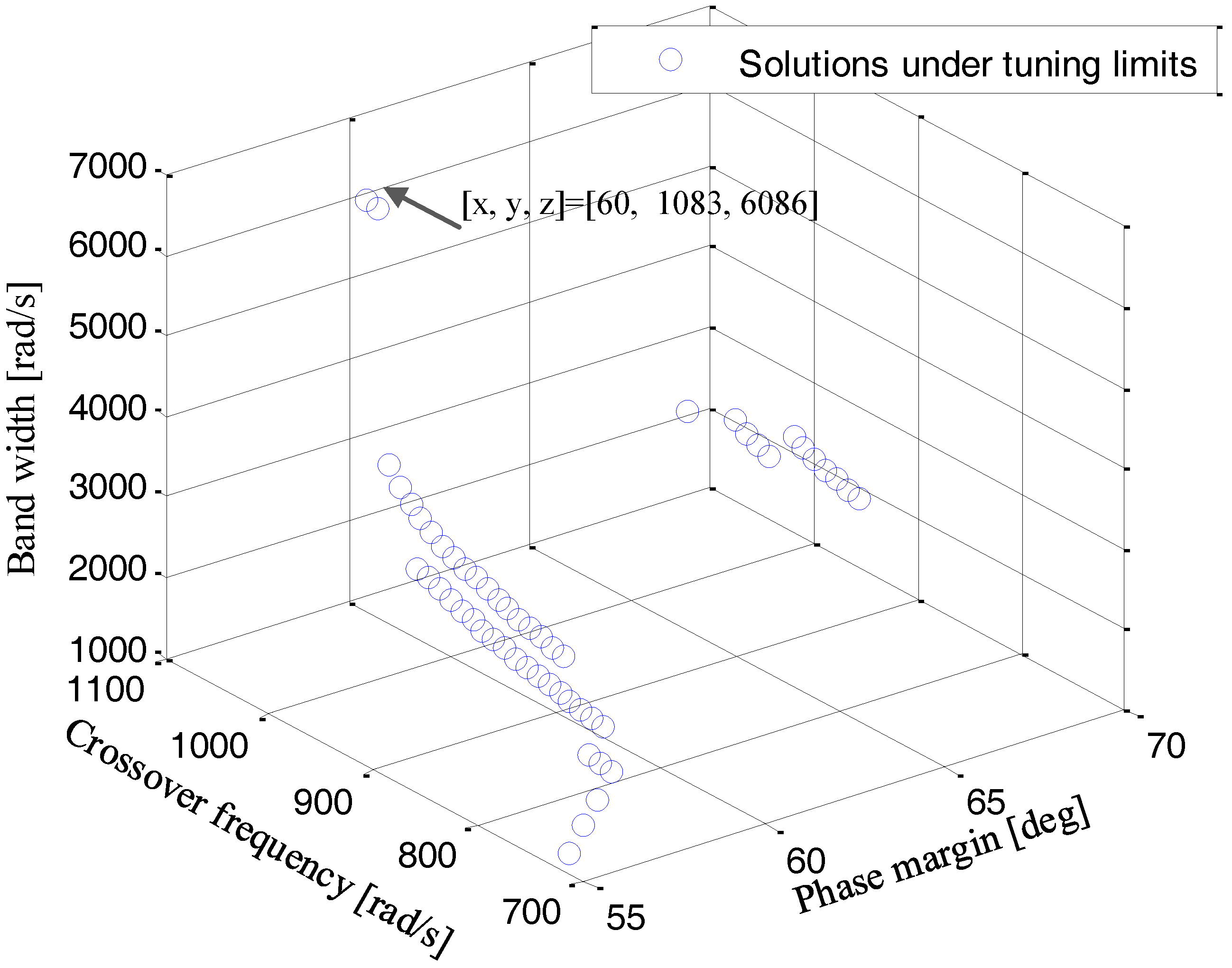
3.3. Optimized Tuning
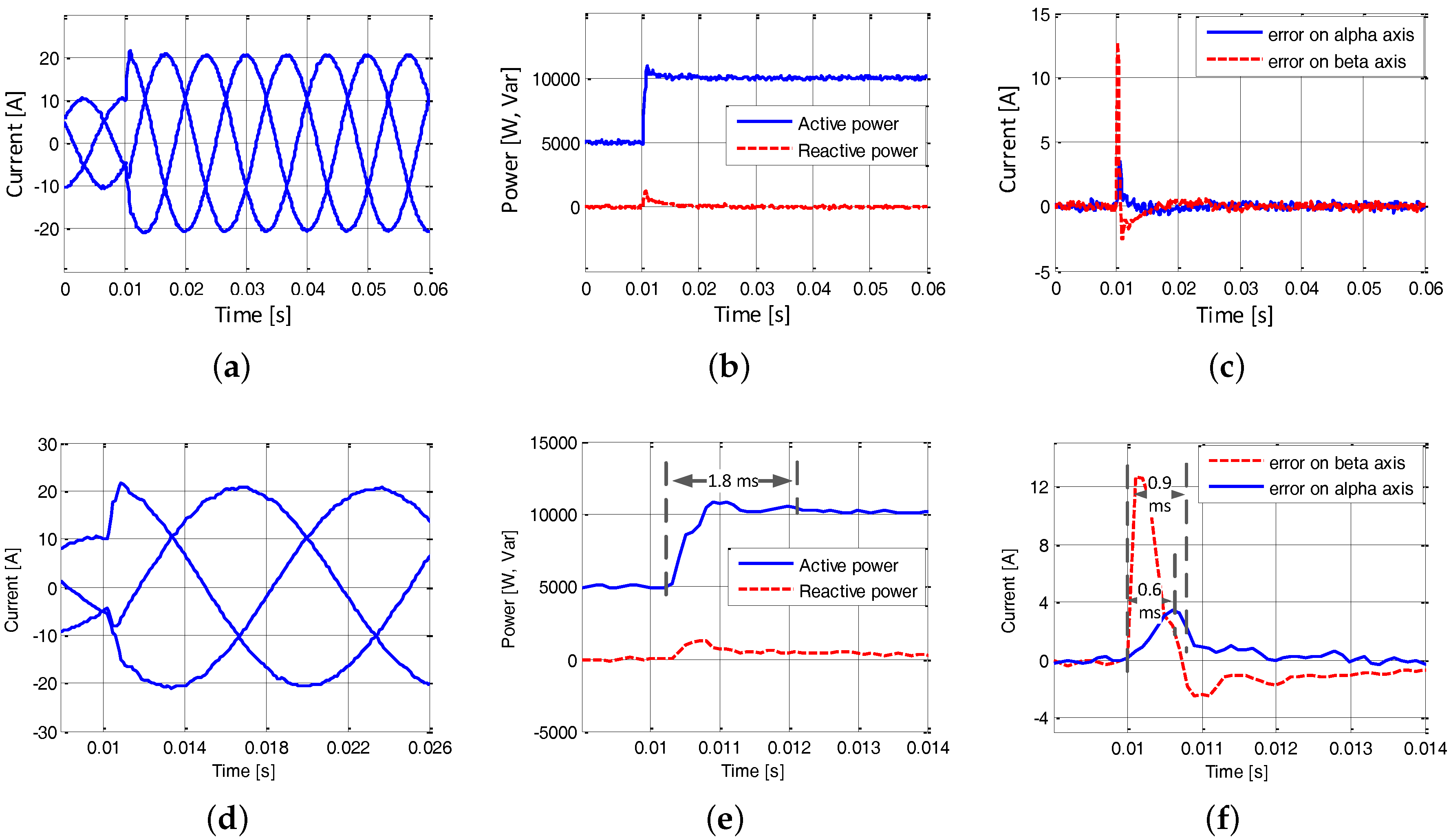
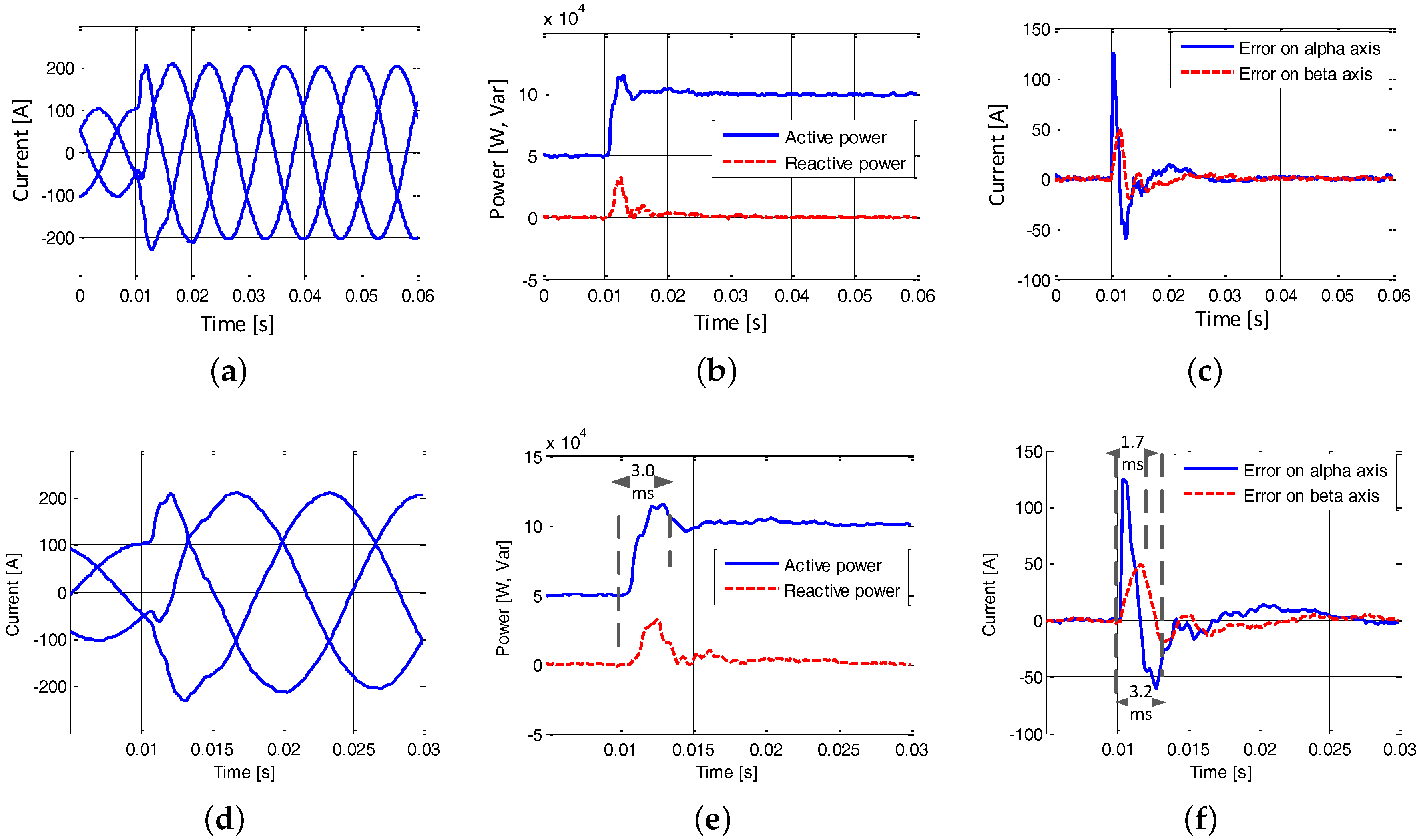
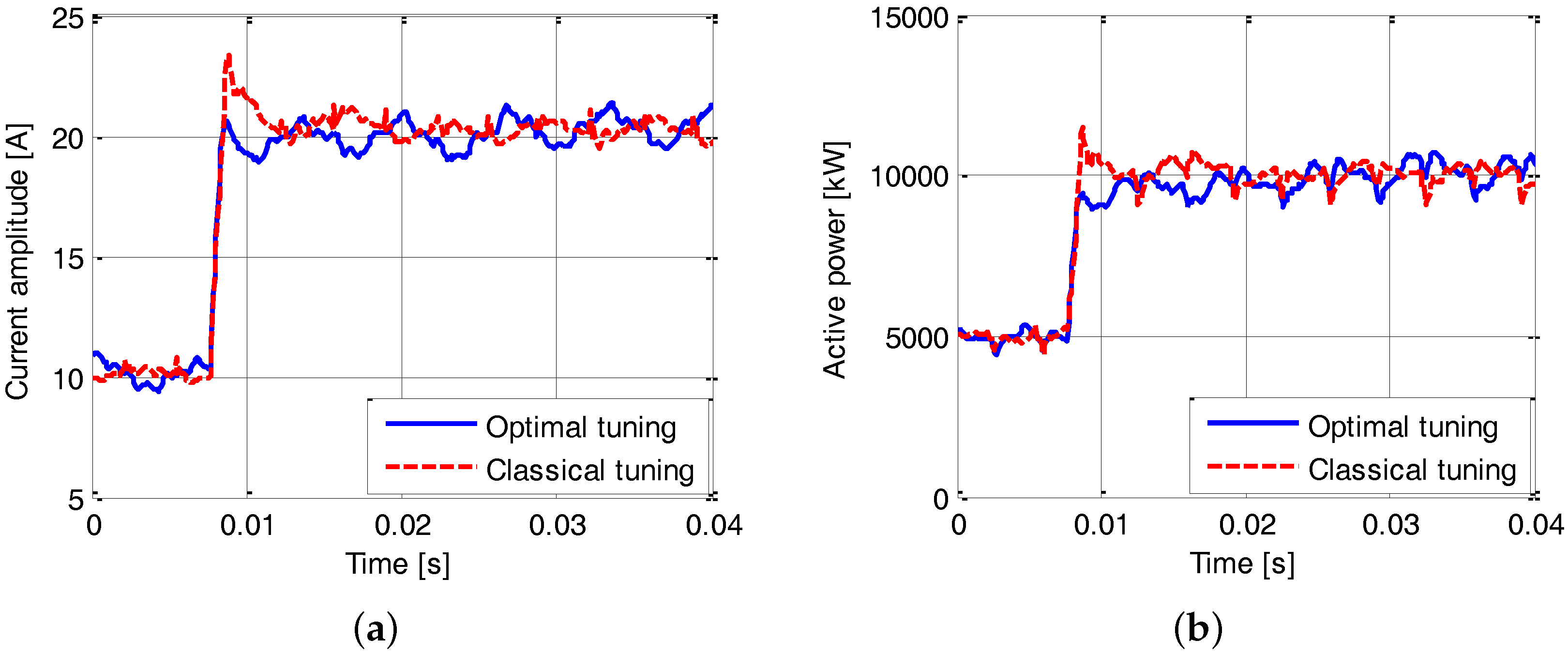
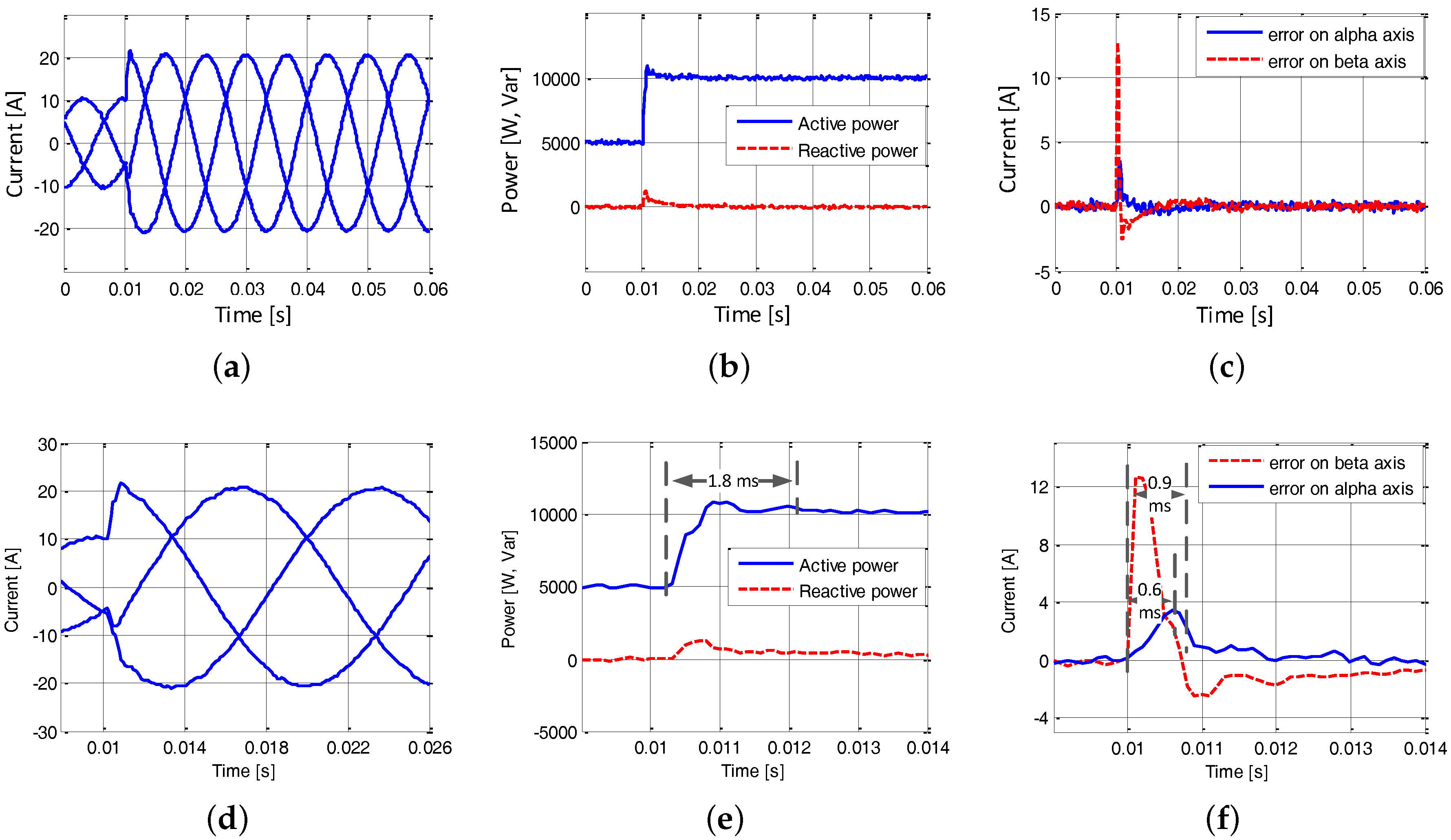
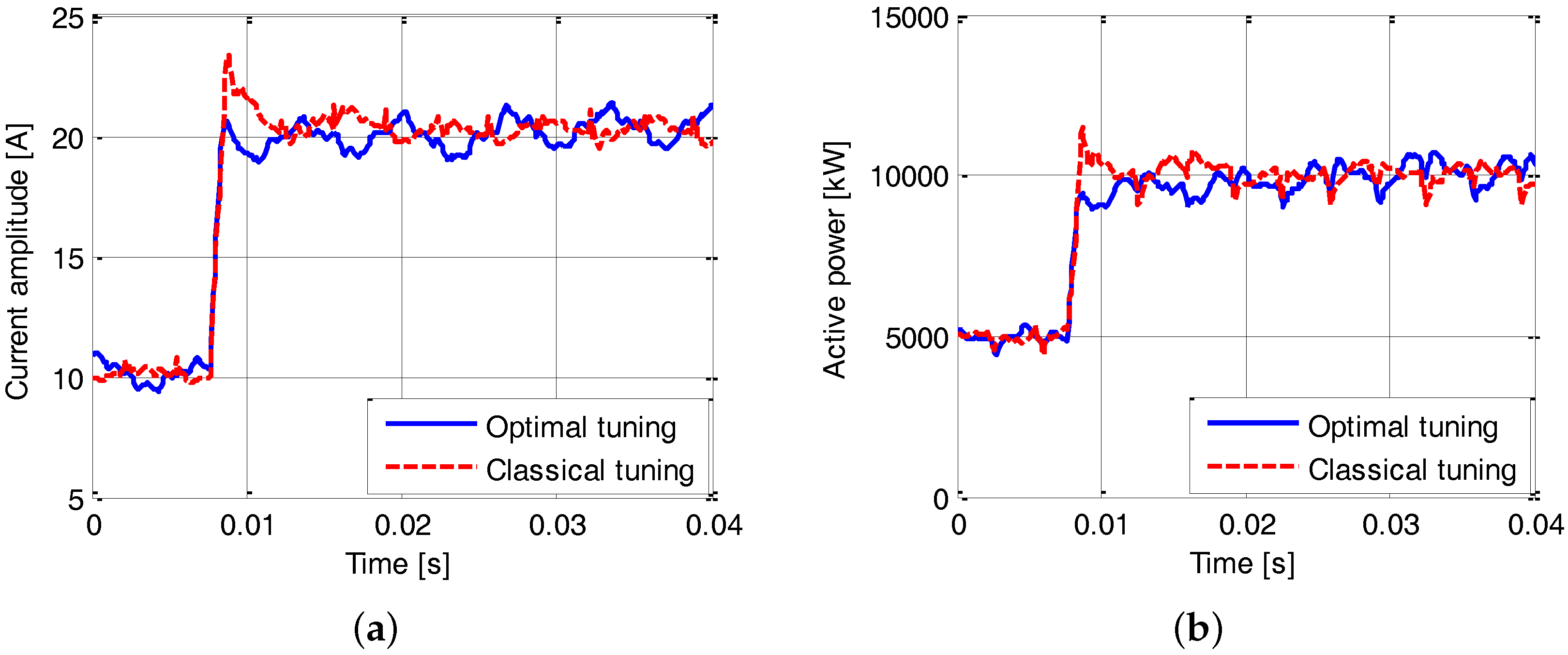
4. Simulation Results
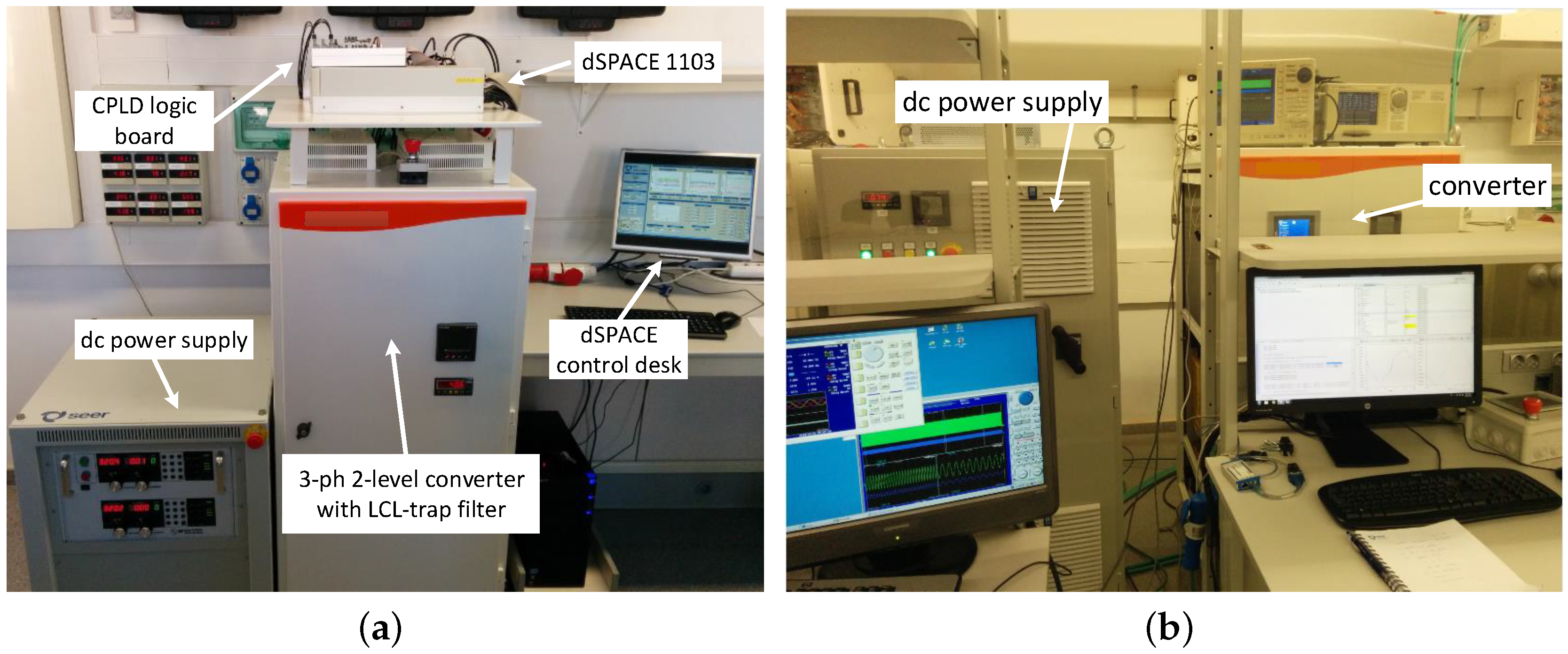
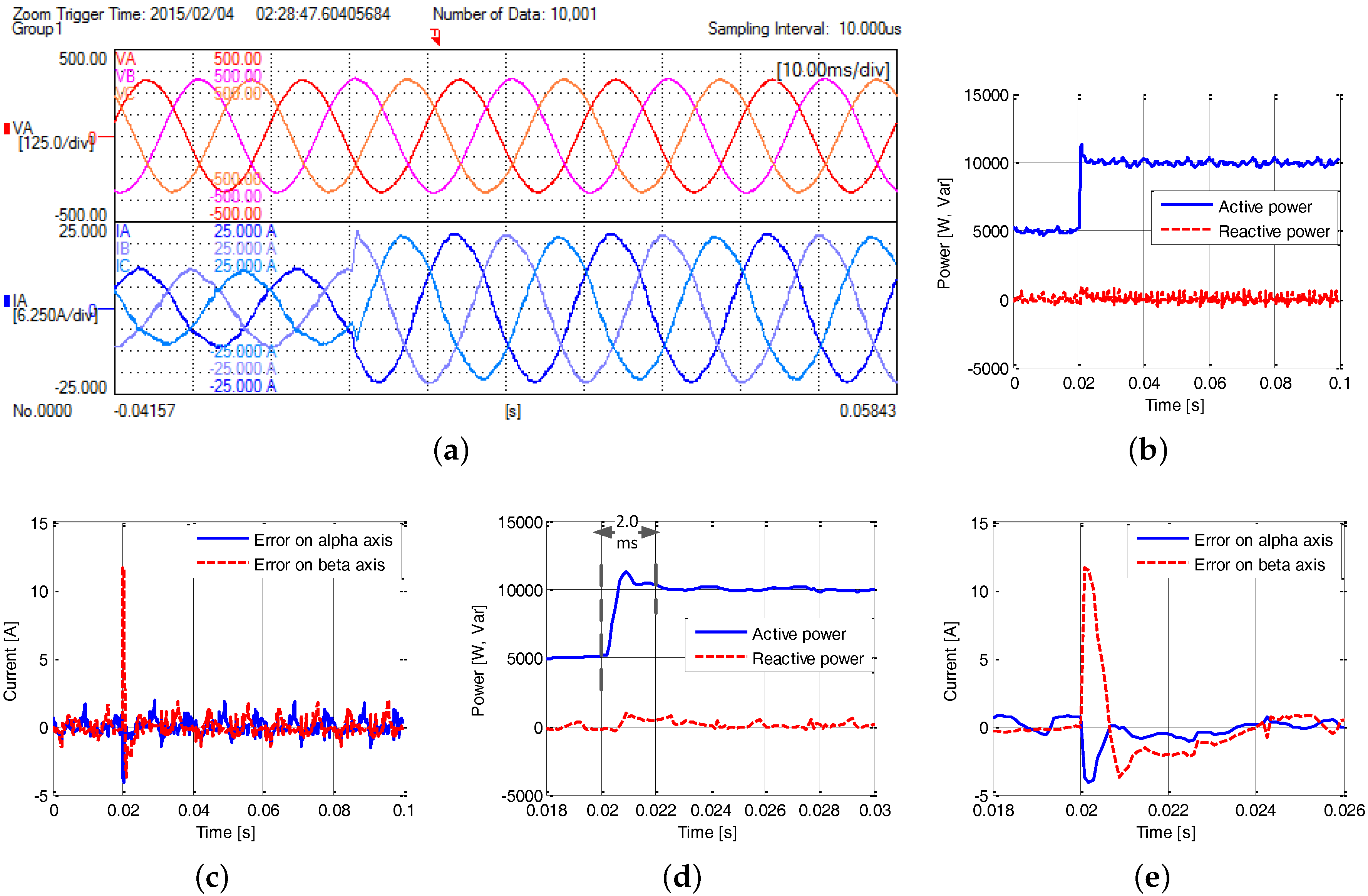
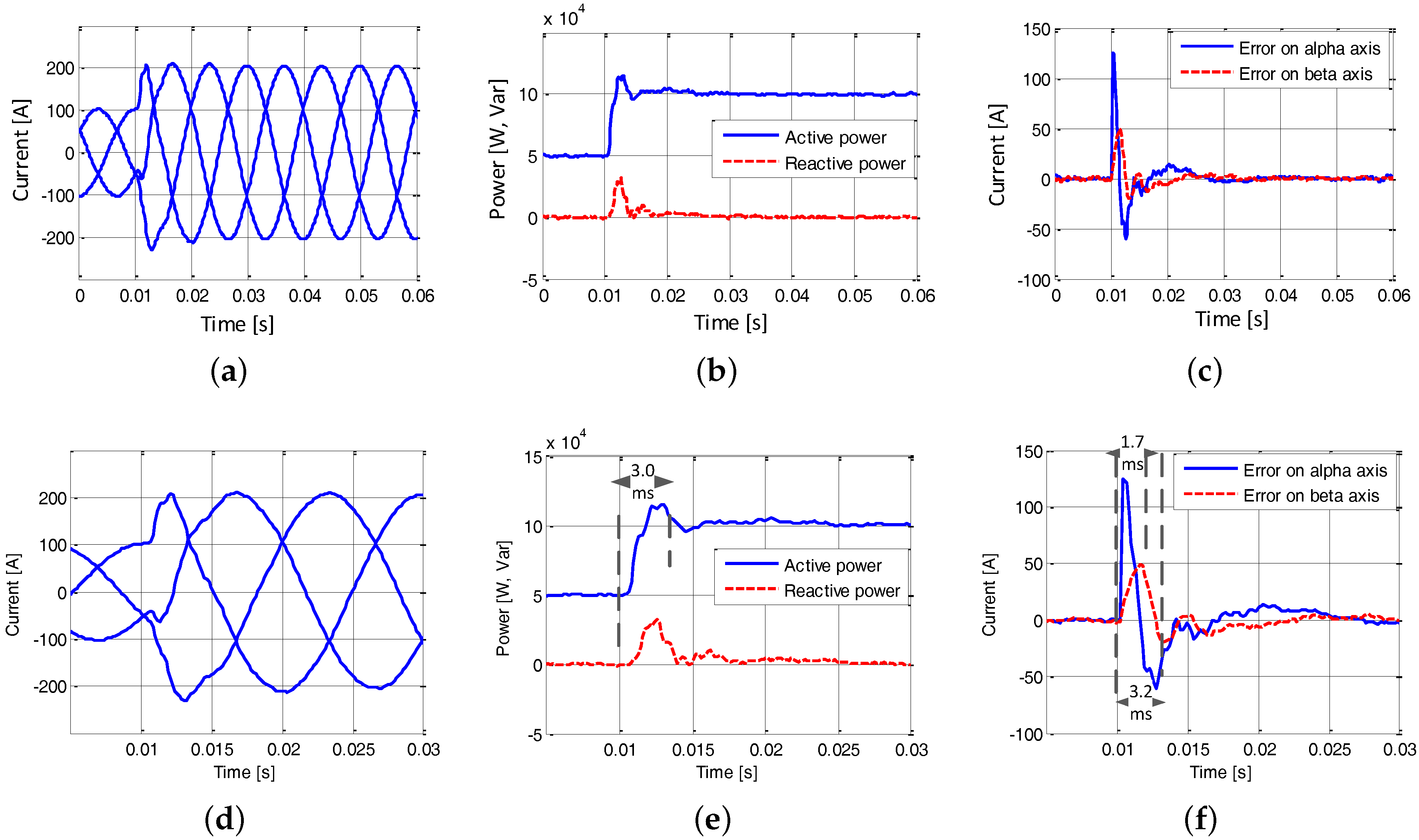
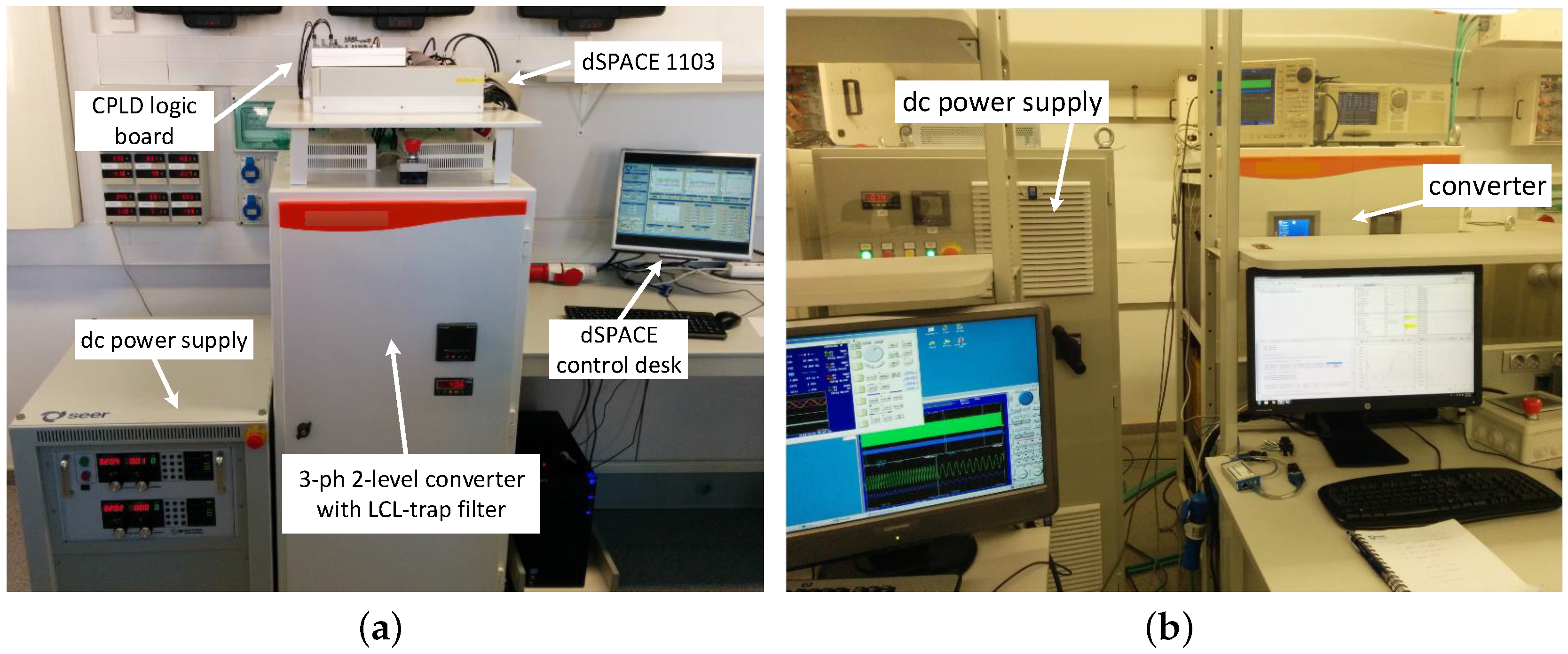
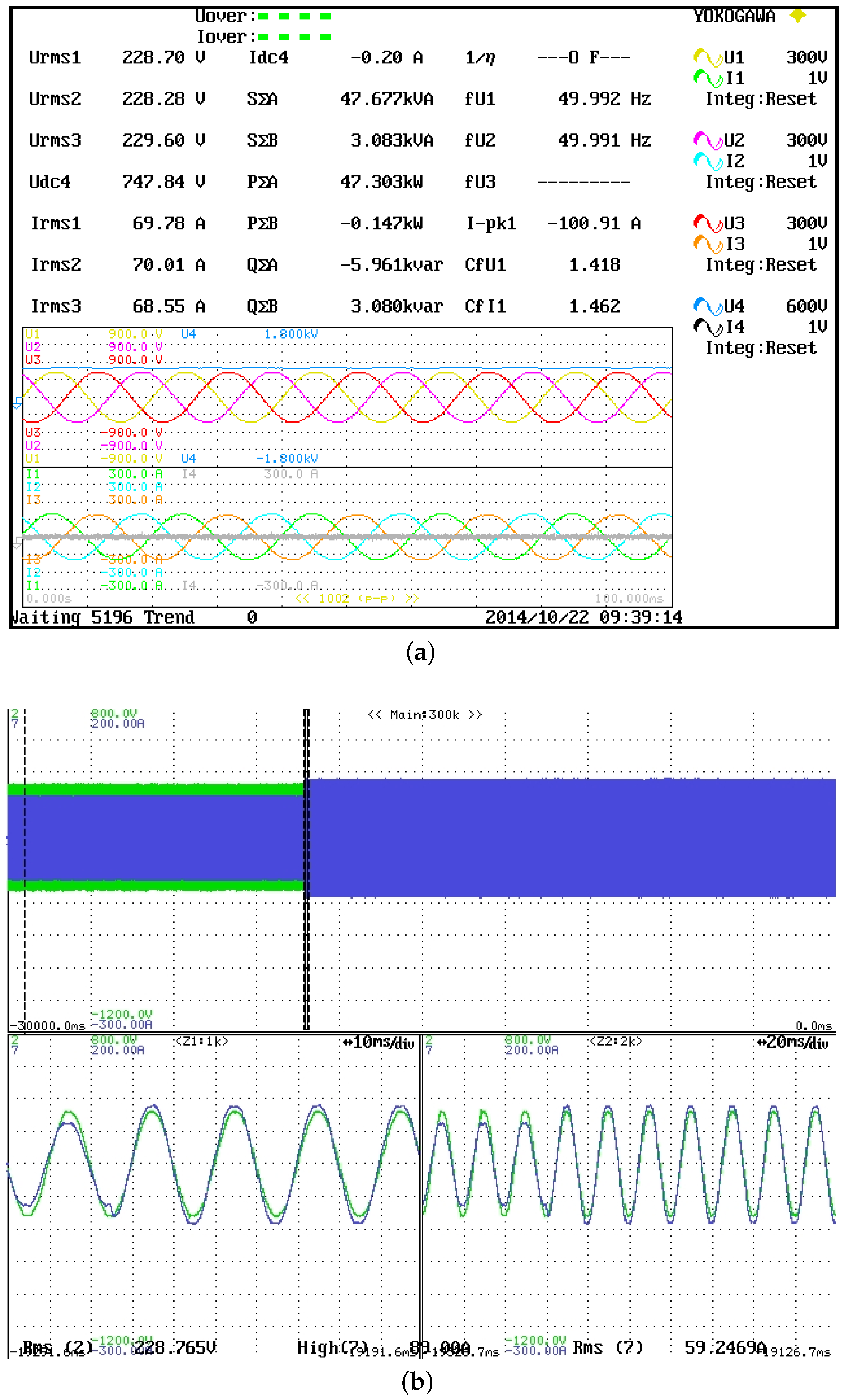
5. Experimental Results
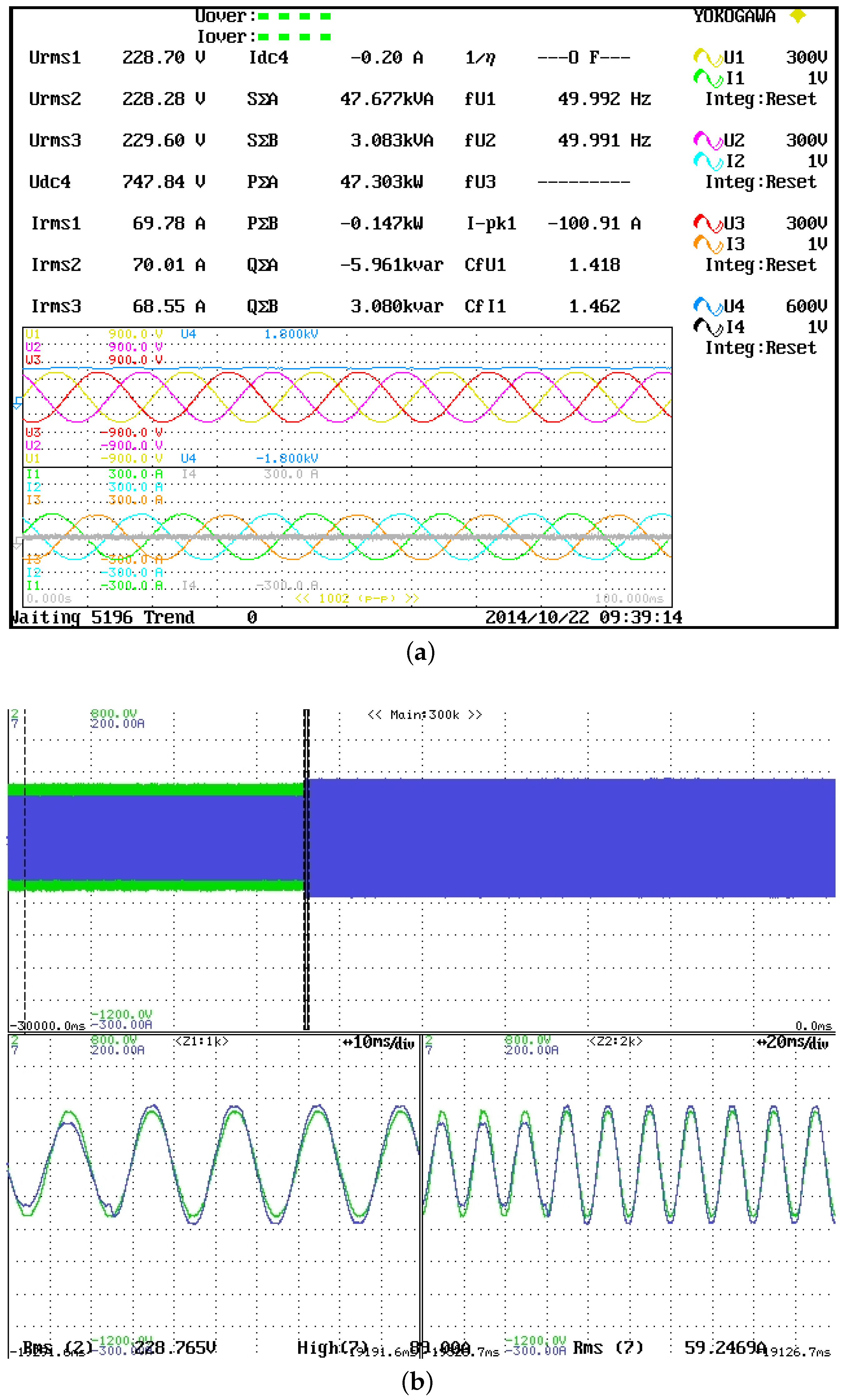
5.1. Steady-State and Dynamic Performance
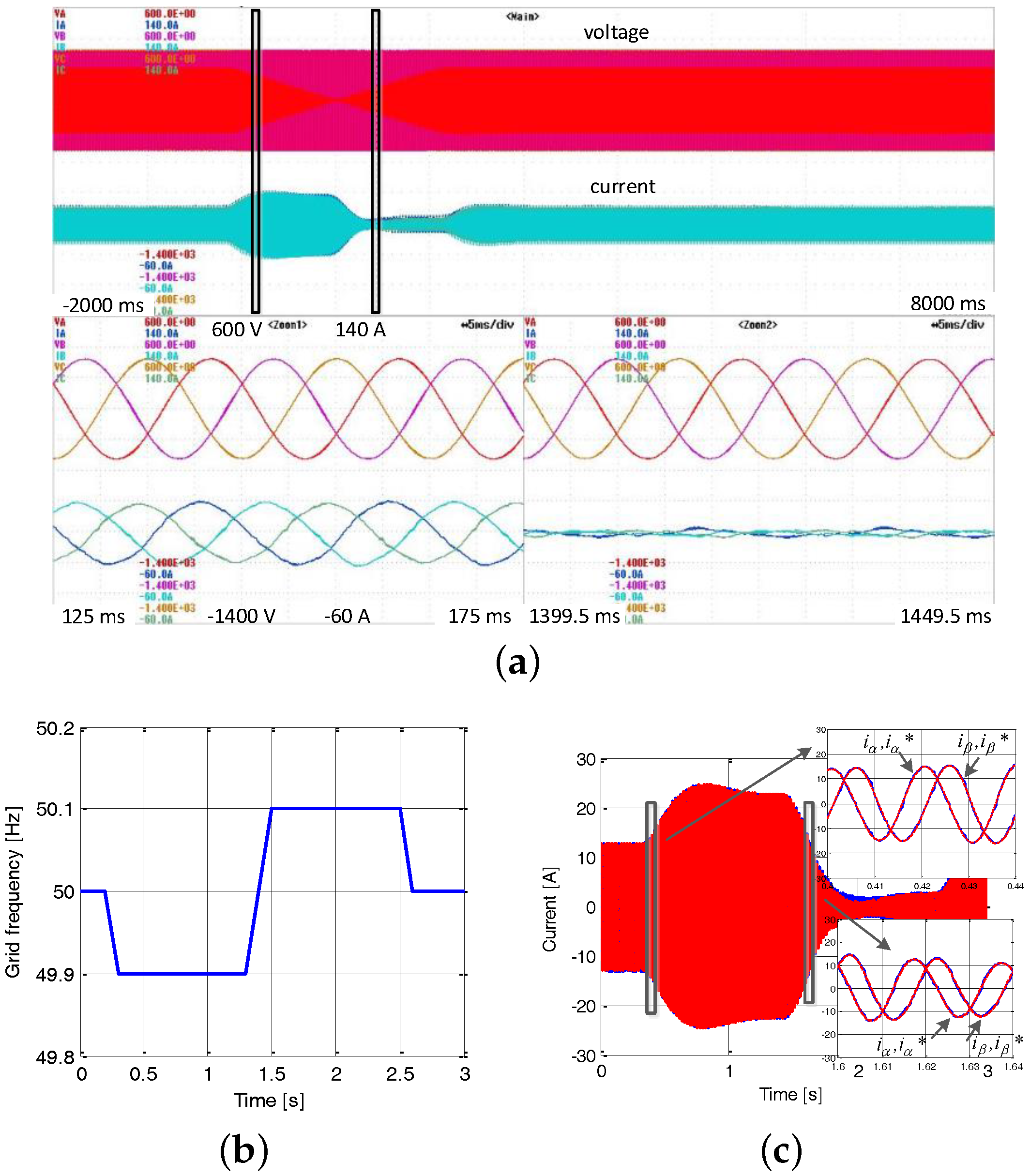
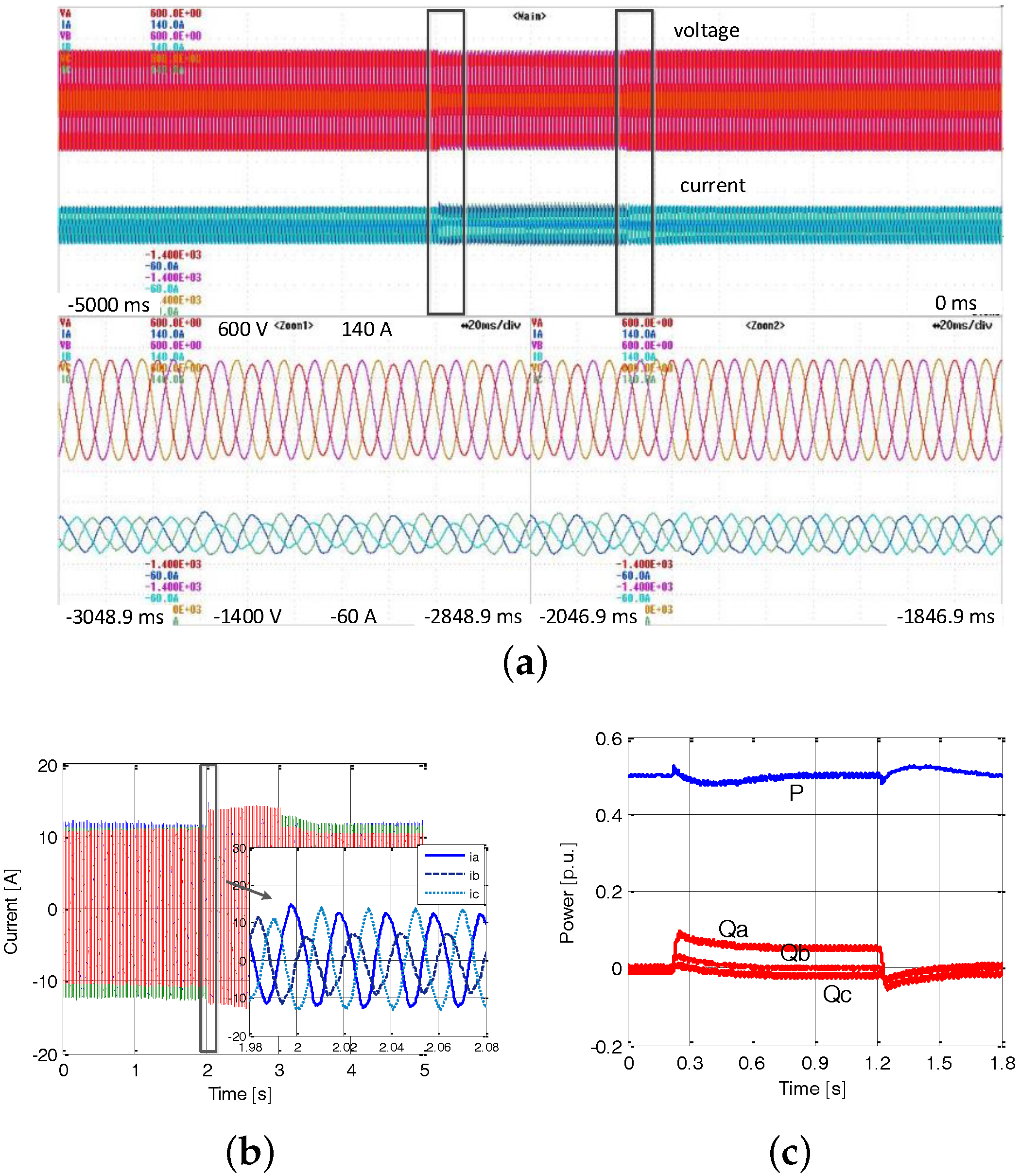
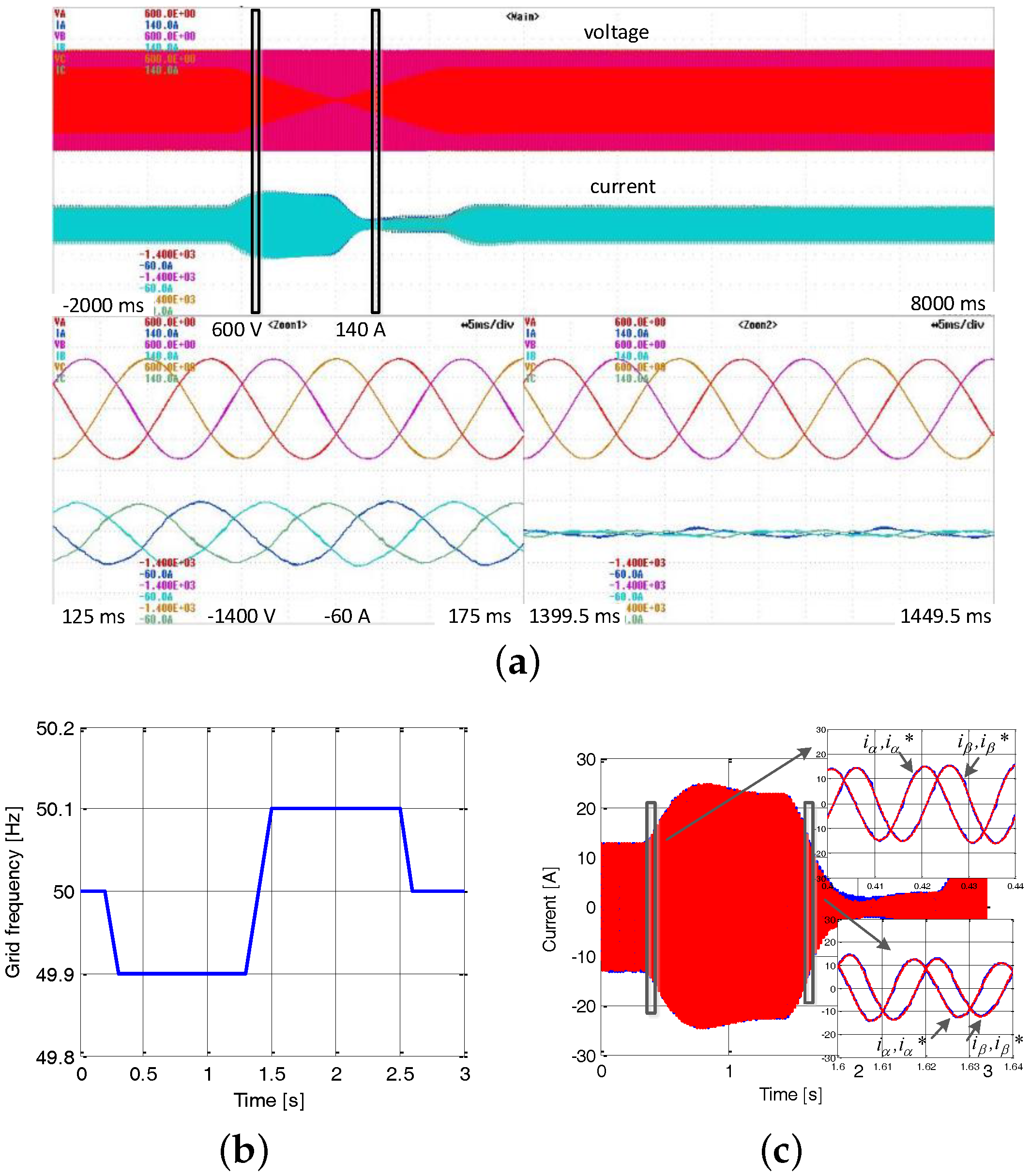
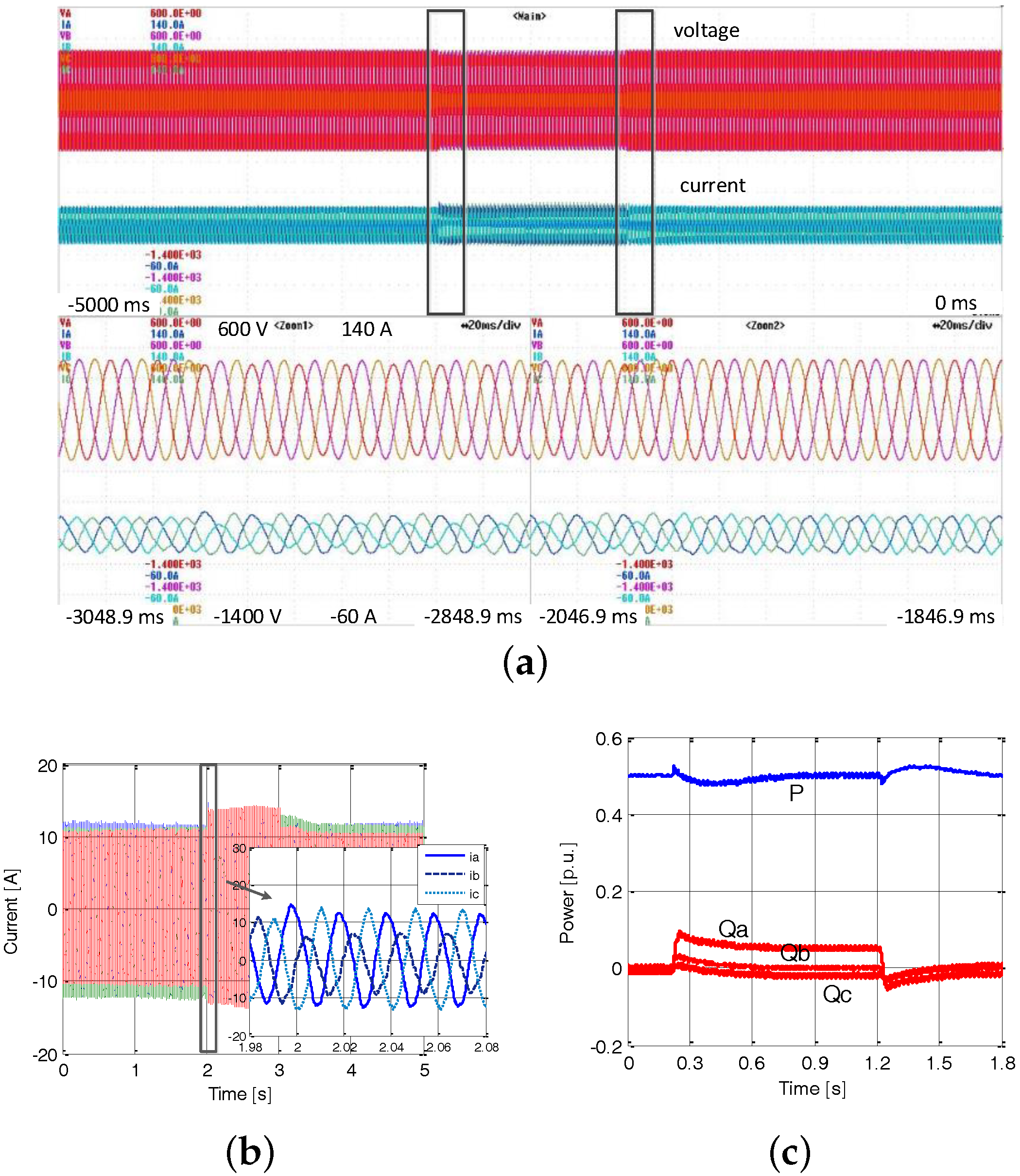
5.2. Performance under Grid Voltage and Frequency Changes
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Van Wesenbeeck, M.P.N.; de Haan, S.W.H.; Varela, P.; Visscher, K. Grid tied converter with virtual kinetic storage. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–7.
- Alatrash, H.; Mensah, A.; Mark, E.; Haddad, G.; Enslin, J. Generator emulation controls for photovoltaic inverters. IEEE Trans. Smart Grid 2012, 3, 996–1011. [Google Scholar] [CrossRef]
- Lai, N.B.; Kim, K.-H. An Improved Current Control Strategy for a Grid-Connected Inverter under Distorted Grid Conditions. Energies 2016, 9, 190. [Google Scholar] [CrossRef]
- Hirase, Y.; Abe, K.; Sugimoto, K.; Shindo, Y. A grid-connected inverter with virtual synchronous generator model of algebraic type. Electr. Eng. Jpn. 2013, 184, 10–21. [Google Scholar] [CrossRef]
- Rodriguez, P.; Candela, I.; Luna, A. Control of PV Generation Systems Using the Synchronous Power Controller. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition (ECCE), Denver, CO, USA, 15–19 September 2003; pp. 993–998.
- Nanou, S.I.; Papakonstantinou, A.G.; Papathanassiou, S.A. A generic model of two-stage grid-connected PV systems with primary frequency response and inertia emulation. Electr. Power Syst. Res. 2015, 127, 186–196. [Google Scholar] [CrossRef]
- Network Code for Requirements for Grid Connection Applicable to all Generators; European Network of Transmission System Operators for Electricity (ENTSO-E): Brussels, Belgium, 2012.
- Nationalgrid. The Grid Code Issue 5 Revision 7; Nationalgrid: London, UK, 2010. [Google Scholar]
- Holmes, D.G.; Lipo, T.A.; McGrath, B.P.; Kong, W.Y. Optimized design of stationary frame three phase AC Current regulators. IEEE Trans. Power Electron. 2009, 24, 2417–2426. [Google Scholar] [CrossRef]
- Yuan, X.; Merk, W.; Stemmler, H.; Allmeling, J. Stationary-frame generalized integrators for current control of active power filters with zero steady-state error for current harmonics of concern under unbalanced and distorted operating conditions. IEEE Trans. Ind. Appl. 2002, 38, 523–532. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Lopez, O.; Doval-Gandoy, J. Analysis and design of resonant current controllers for voltage-source converters by means of nyquist diagrams and sensitivity function. IEEE Trans. Ind. Electron. 2011, 58, 5231–5250. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc. Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef]
- Zhang, N.; Tang, H.; Yao, C. A Systematic Method for Designing a PR Controller and Active Damping of the LCL Filter for Single-Phase Grid-Connected PV Inverters. Energies 2014, 7, 3934–3954. [Google Scholar] [CrossRef]
- Jeong, H.-G.; Kim, G.-S.; Lee, K.-B. Second-Order Harmonic Reduction Technique for Photovoltaic Power Conditioning Systems Using a Proportional-Resonant Controller. Energies 2013, 6, 79–96. [Google Scholar] [CrossRef]
- Martinez-Rodrigo, F.; de Pablo, S.; Herrero-de Lucas, L.C. Current control of a modular multilevel converter for HVDC applications. Renew. Energy 2015, 83, 318–331. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Jorgensen, B.N.; Catalao, J.P.S. A control plan for the stable operation of microgrids during grid-connected and islanded modes. Electr. Power Syst. Res. 2015, 129, 10–22. [Google Scholar] [CrossRef]
- Twining, E.; Holmes, D.G. Grid Current Regulation of a Three-Phase Voltage Source Inverter With an LCL Input Filter. IEEE Trans. Power Electron. 2013, 18, 888–895. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant frequency-locked loop for grid synchronization of power converters under distorted grid conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Yao, W.; Hang, L.; Tolbert, L.M. Robust proportional resonant regulator for grid-connected voltage source inverter (VSI) using direct pole placement design method. IET Power Electron. 2012, 5, 1367–1373. [Google Scholar] [CrossRef]
- Zeng, G.; Rasmussen, T.W. Design of Current-Controller with PR-Regulator for LCL-Filter Based Grid-Connected Converter. In Proceedings of the 2010 2nd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Hefei, China, 16–18 June 2010; pp. 490–494.
- Lezana, P.; Silva, C.A.; Rodriguez, J.; Perez, M.A. Zero-steady-state-error input-current controller for regenerative multilevel converters based on single-phase cells. IEEE Trans. Ind. Electron. 2007, 54, 733–740. [Google Scholar] [CrossRef]
- Buso, S.; Mattavelli, P. Digital Control in Power Electronics, 1st ed.; Morgan & Claypool: San Rafael, CA, USA, 2006. [Google Scholar]
- Vidal, A.; Freijedo, F.D.; Yepes, A.G.; Fernandez-comesana, P.; Malvar, J.; Lopez, O.; Doval-Gandoy, J. Assessment and optimization of the transient response of proportional-resonant current controllers for distributed power generation systems. IEEE Trans. Ind. Electron. 2013, 60, 1367–1383. [Google Scholar] [CrossRef]
- Lee, S.; Lee, K.J.; Hyun, D.S. Modeling and Control of a Grid Connected VSI Using a Delta Connected LCL Filter. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 833–838.
- Rodriguez, P.; Candela, I.; Rocabert, J.; Teodorescu, R. Synchronous Power Controller for a Generating System Based on Static Power Converters. Patent WO 2012/117131 A1, 7 September 2012. [Google Scholar]
- Zhang, W.; Remon, D.; Mir, A.; Luna, A.; Rocabert, J.; Candela, I.; Rodriguez, P. Comparison of Different Power Loop Controllers for Synchronous Power Controlled Grid-Interactive Converters. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 3780–3787.
- Zhang, W.; Cantarellas, A.M.; Rocabert, J.; Luna, A.; Rodriguez, P. Synchronous Power Controller with Flexible Droop Characteristics for Renewable Power Generation Systems. IEEE Trans. Sustain. Energy 2016. [Google Scholar] [CrossRef]
- Cantarellas, A.M.; Rakhshani, E.; Remon, D.; Rodriguez, P. Design of the LCL+Trap Filter for the Two-Level VSC Installed in a Large-Scale Wave Power Plant. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition (ECCE), Denver, CO, USA, 15–19 September 2013; pp. 707–712.
- Xu, J.; Yang, J.; Ye, J.; Zhang, Z.; Shen, A. An LTCL filter for three-phase grid-connected converters. IEEE Trans. Power Electron. 2014, 29, 4322–4338. [Google Scholar] [CrossRef]
- Turner, R.; Walton, S.; Duke, R. Robust high-performance inverter control using discrete direct-design pole placement. IEEE Trans. Ind. Electron. 2011, 58, 348–357. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Doval-Gandoy, J.; Lopez, O.; Malvar, J.; Fernandez-Comesana, P. Effects of discretization methods on the performance of resonant controllers. IEEE Trans. Power Electron. 2010, 25, 1692–1712. [Google Scholar] [CrossRef]
- Richter, S.A.; de Doncker, R.W. Digital Proportional-Resonant ( PR ) Control with Anti-Windup Applied to a Voltage-Source Inverter. In Proceedings of the 2011-14th European Conference on Power Electronics and Applications (EPE 2011), Birmingham, UK, 30 August–1 September 2011; pp. 1–10.
- Rodriguez, F.J.; Bueno, E.; Aredes, M.; Rolim, L.G.B.; Neves, F.A.S.; Cavalcanti, M.C. Discrete-Time Implementation of Second Order Generalized Integrators for Grid Converters. In Proceedings of the IECON 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 176–181.
- Espi, J.M.; Castello, J.; Garcia-Gil, R.; Garcera, G.; Figueres, E. An adaptive robust predictive current control for three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2011, 58, 3537–3546. [Google Scholar] [CrossRef]
- Park, S.Y.; Chen, C.L.; Lai, J.S.; Moon, S.R. Admittance compensation in current loop control for a grid-tie LCL fuel cell inverter. IEEE Trans. Power Electron. 2008, 23, 1716–1723. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Munoz-Aguilar, R.S.; Etxeberria-Otadui, I.; Teodorescu, R.; Blaabjerg, F. A stationary reference frame grid synchronization system for three-phase grid-connected power converters under adverse grid conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Rodriguez, P.; Timbus, A.V.; Teodorescu, R.; Liserre, M.; Blaabjerg, F. Flexible active power control of distributed power generation systems during grid faults. IEEE Trans. Ind. Electron. 2007, 54, 2583–2592. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (V) | 750 | (Ω) | 0.0021 |
| (H) | 778 | (Ω) | 0.5 |
| (H) | 402 | (kW) | 100 |
| (F) | 66 | (Hz) | 3150 |
| (F) | 30 | (Hz) | 6300 |
| (H) | 85 | (V) | 400 |
| (Ω) | 0.0073 | (Hz) | 50 |
| Variable | Symbol | Boundary |
|---|---|---|
| Settling time (ms) | <25 | |
| Overshoot (%) | <15 | |
| Gain margin (dB) | >5 | |
| Phase margin (degree) | >35 |
| Parameter | Symbol | Value |
|---|---|---|
| Proportional gain | 1.2192 | |
| Resonant gain | 0.5593 | |
| Settling time (ms) | 22.5 | |
| Overshoot (%) | 14.66 | |
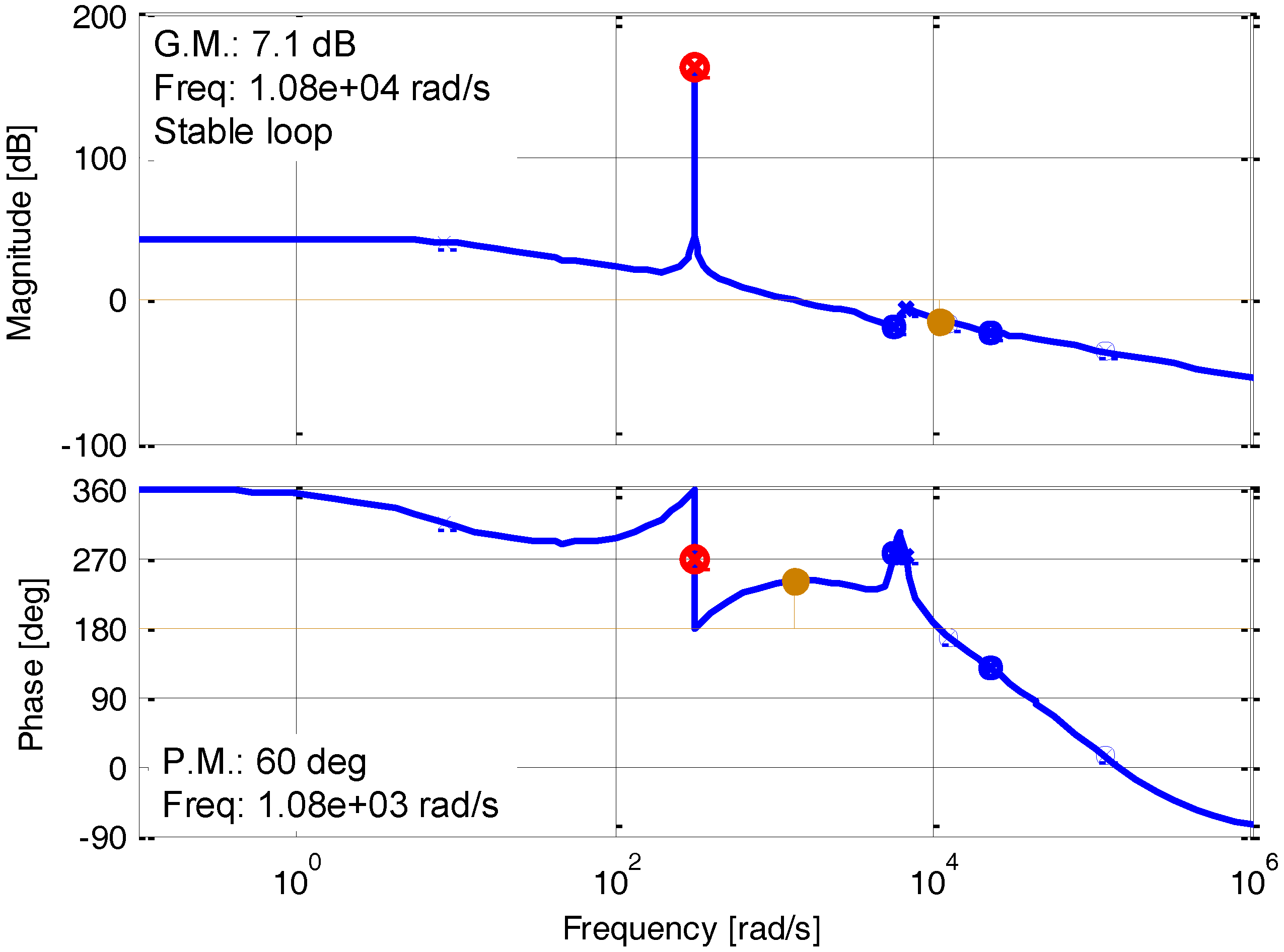
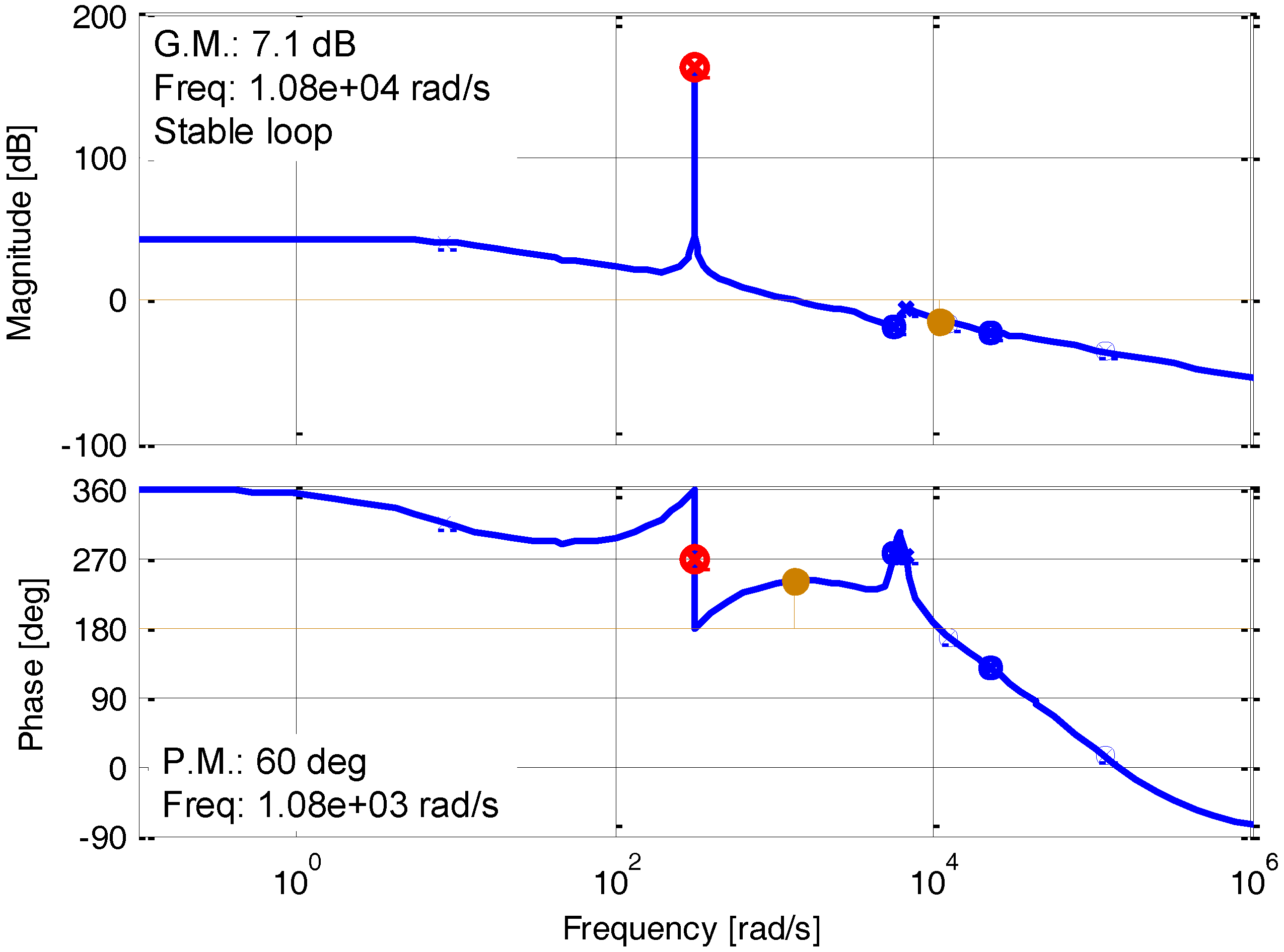
| Gain margin (dB) | 7.1276 | |
| Phase margin (degree) | 60 | |
| Band width (rad/s) | 6086 | |
| Crossover frequency (rad/s) | 1083 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| (V) | 640 | (Ω) | 0.094 |
| (mH) | 2.6 | (Ω) | 1 |
| (H) | 662 | (kW) | 10 |
| (F) | 5.5 | (Hz) | 10,050 |
| (F) | 1 | (Hz) | 10,050 |
| (H) | 244 | (V) | 400 |
| (Ω) | 0.025 | (Hz) | 50 |
| 8.7818 | 7.7968 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Remon, D.; Cantarellas, A.M.; Rodriguez, P. A Unified Current Loop Tuning Approach for Grid-Connected Photovoltaic Inverters. Energies 2016, 9, 723. https://doi.org/10.3390/en9090723
Zhang W, Remon D, Cantarellas AM, Rodriguez P. A Unified Current Loop Tuning Approach for Grid-Connected Photovoltaic Inverters. Energies. 2016; 9(9):723. https://doi.org/10.3390/en9090723
Chicago/Turabian StyleZhang, Weiyi, Daniel Remon, Antoni M. Cantarellas, and Pedro Rodriguez. 2016. "A Unified Current Loop Tuning Approach for Grid-Connected Photovoltaic Inverters" Energies 9, no. 9: 723. https://doi.org/10.3390/en9090723