As we have seen in the previous section, the problem of minimizing the number of charging cycles when multiple devices are considered is difficult, even if all of the devices are equal and we do not incorporate any grid constraints beyond (1). However, finding a feasible solution and minimizing the throughput is easy, as it can be formulated as an LP. The question remains what happens when we consider minimizing charging cycles for a single device, i.e., when we consider the problem with . We note that we omit further grid constraints beyond (1), since we can assume the storage device to be positioned reasonably close to the asset for which it is used to ensure the energy flow is between pre-specified bounds.
4.1. Key Observations
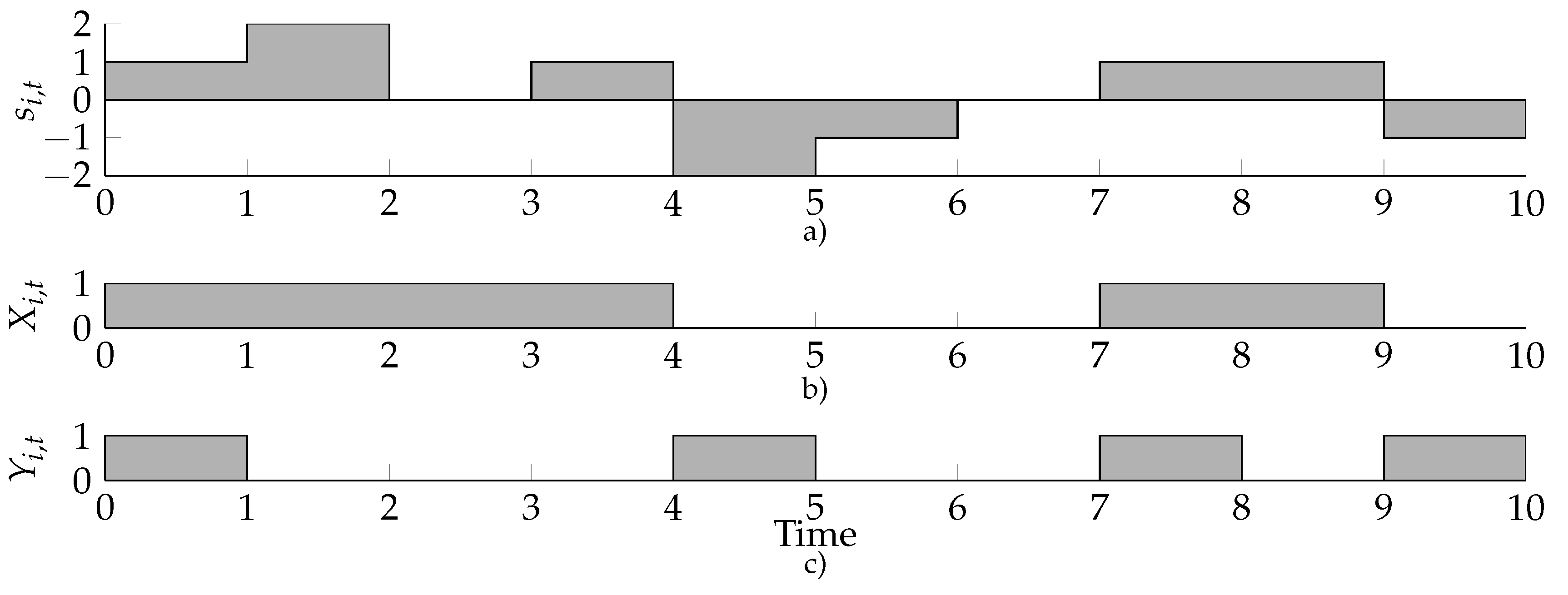
When considering a single device, it is possible to combine the flow and power constraints (2) and (4). From (2), it follows that
, and from (4), it follows that
. This gives us that
must lie in the intersection of the two intervals for every
t. If we define
and
, then the power and flow constraints (2) and (4) are equivalent to:
Note that it is possible that for some time interval if for example . However, this implies that the storage device cannot charge enough energy in a single time interval to get the resulting flow between the desired bounds. Since these instances are infeasible, we assume that this is never the case, i.e., we assume that for all .
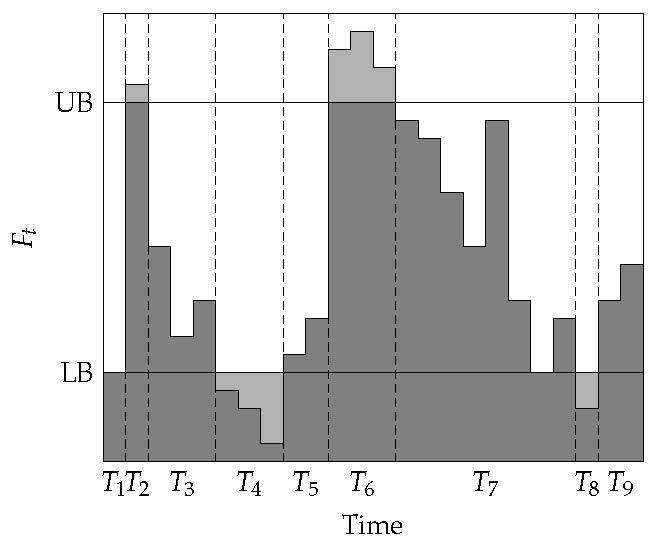
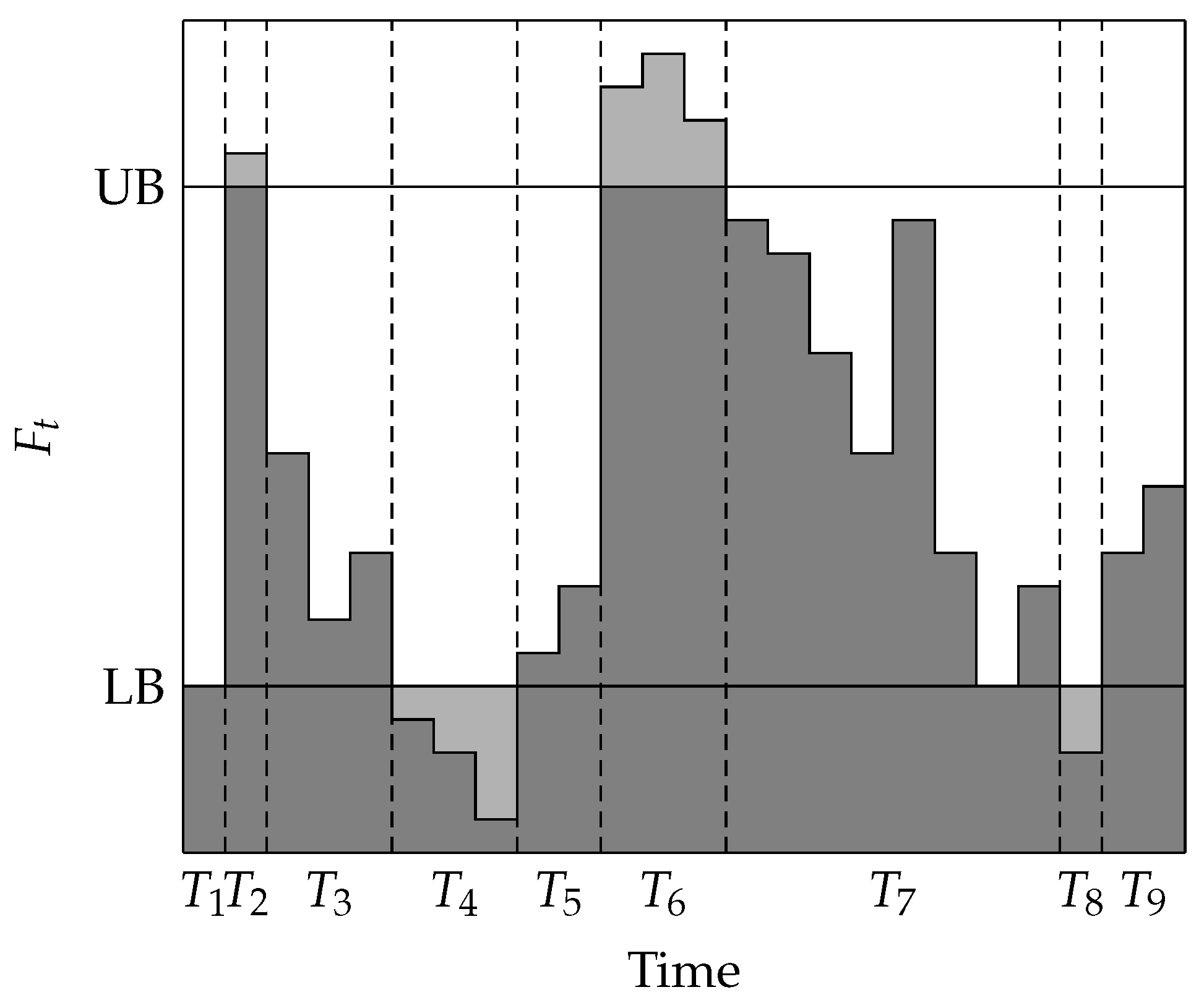
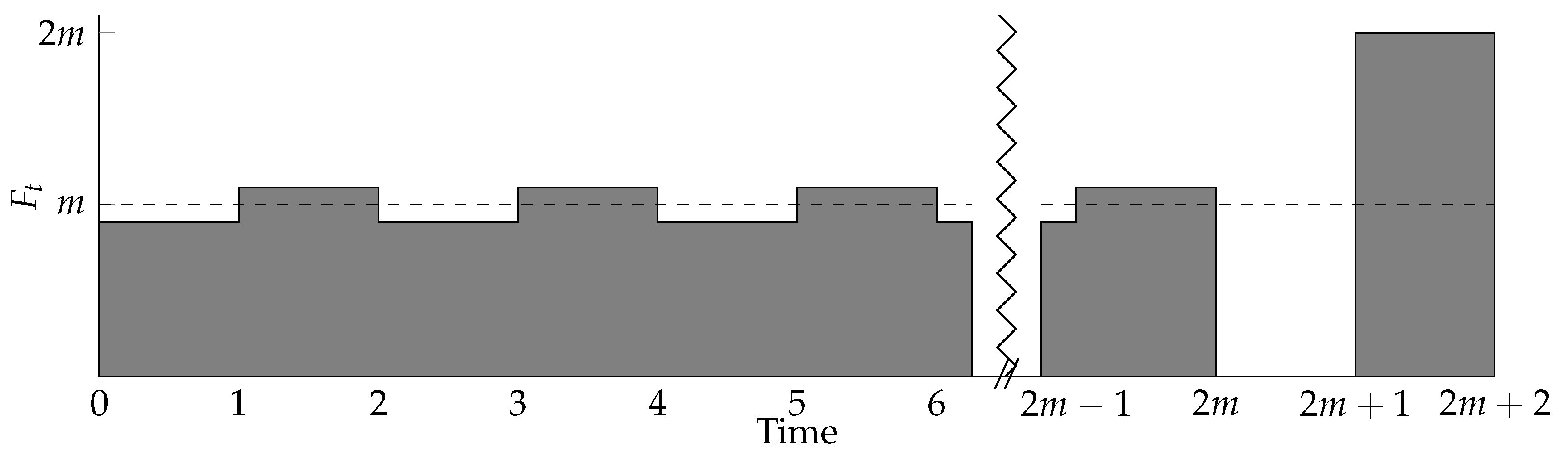
Let us now consider the set of time intervals. We can characterize these time interval based on their intervals specifying the domain of . We consider three possible options: (A) the device is not forced to do anything by the flow bounds (9); (B) the device is forced to charge by the flow bounds (9) and (C) the device is forced to discharge by the flow bounds (9). In the first case, we have that ; in the second case, we have ; and in the last case, we have that . If two consecutive time intervals t and both belong to Case (B), then in any feasible schedule, we have . Furthermore, if t and belong to Case (C) then in any feasible schedule, we have .
Now, assume that t and both belong to Case (A), and we have a feasible schedule with and or vice versa. Taking the smallest, in absolute value, of the two values and adding it to the other results in a feasible schedule that has either or . Note that this new schedule potentially has one switch less, but never more switches than the former schedule. Thus, we can restrict without loss of generality to schedules for which consecutive intervals that belong to the same case, as specified above, either both charge or both discharge. Hereby, we assume that doing nothing (i.e., ) can be seen as either charging or discharging.
The above property gives rise to a different way of approaching the set
. Instead of considering the time intervals in
individually, it is possible to group them into blocks of consecutive time intervals with the same characteristic. These blocks form a partition of
and should be taken maximally with respect to the union,
i.e., no two consecutive blocks should contain time intervals of the same characteristic. Let
be the resulting partition of
into blocks of the same characteristic. We say
to indicate that
, which means that all time intervals in
lie before the time intervals in
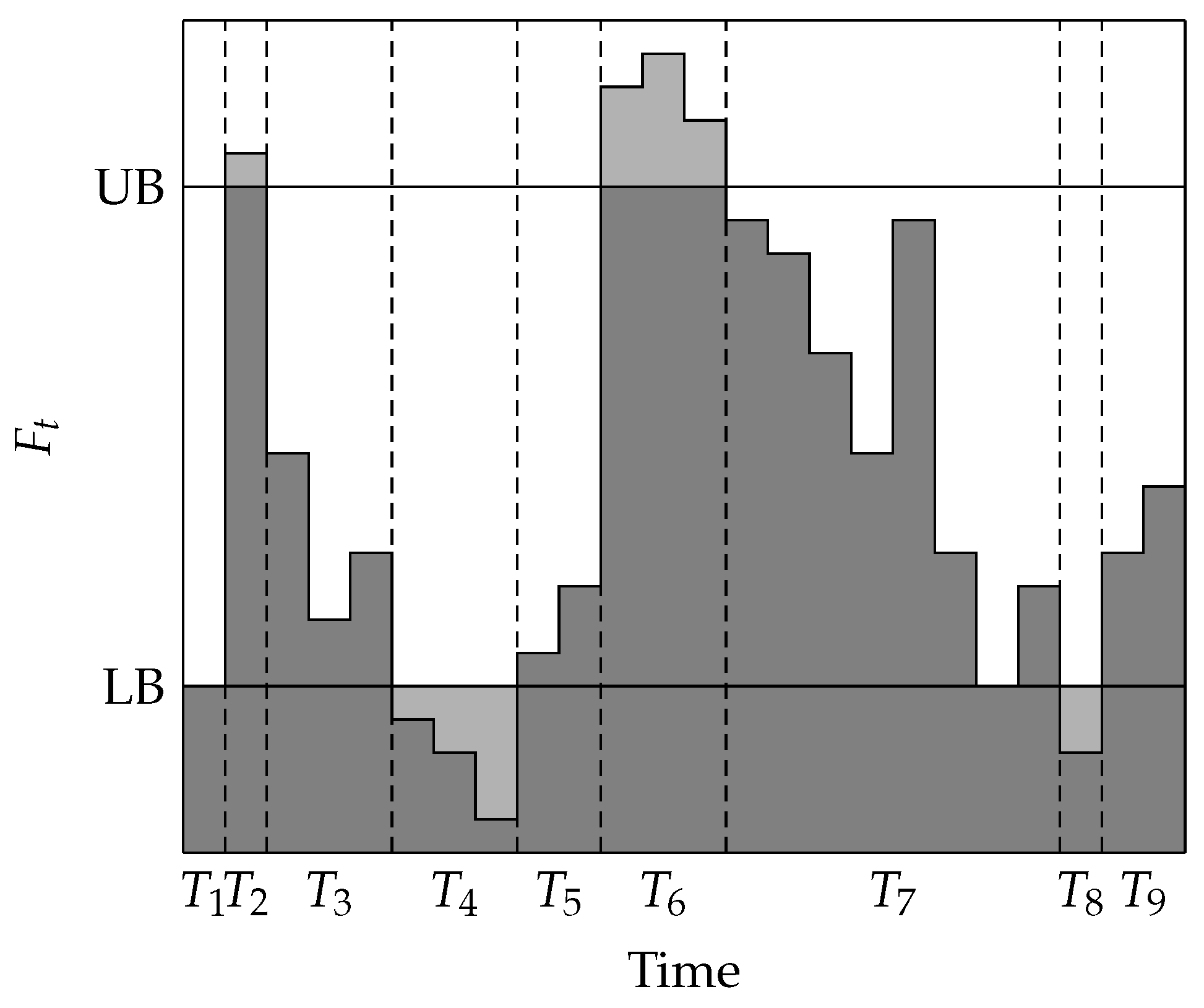
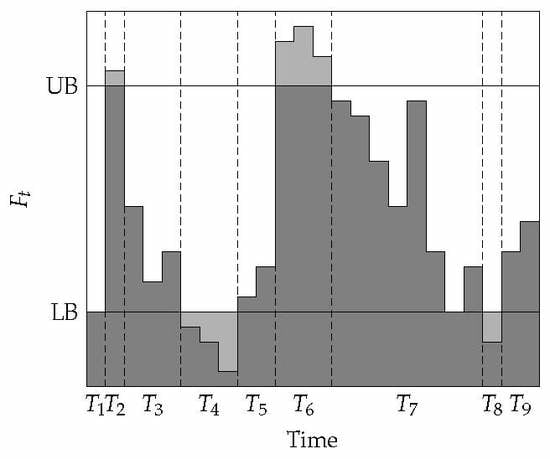
. An example of the partition of the time intervals into blocks is given in
Figure 3.
It is now possible to reformulate
in terms of blocks instead of time intervals. For readability, the variables and parameters corresponding to block
will be denoted by index
n. First, we consider the combined flow and power constraint (9). Defining
and
allows us to rewrite (9) as:
Furthermore, the state of charge (SoC) of the device at the end of block
is given by
. The SoC constraints (3) can then be rewritten as:
A reformulation of (6) and (7) leads to:
Again,
is an input parameter indicating if the device was charging or discharging at the beginning of the time horizon. The reformulation of
then becomes:
By construction, we have that a feasible solution for this reformulation of can easily be transformed into a feasible solution of the original formulation of with the same objective value.
For solving , the following simple, but specific schedule, which may be infeasible, plays an important role.
Definition 2. The naive local schedule
is defined by:
Note that uses the device as little as possible while satisfying the flow and power constraints (10). However, it is possible that it violates the SoC constraints (11) at some point. Nevertheless, it can be used as a basis to construct a feasible (and optimal) schedule, as is shown below.
To deal with SoC-constraint violations, we make the following observation. Assume we have an infeasible schedule
S with
for some block
. Furthermore assume that for some block
we have
. Updating
S to become feasible requires that some extra energy is charged into the device before
. However, any extra energy charged before
does not help, since it causes an overflow at
. Thus, any attempt to make
S feasible has to charge an extra amount of
between blocks
and
. This gives rise to the following definition:
Definition 3. For a given infeasible schedule S and block with either or in schedule S, the decoupling point is the last block before with or , respectively.
These decoupling points indicate which blocks can be ignored when attempting to change an infeasible schedule to a feasible one. In the next subsection, structural properties are considered using the above observations, which lead to a polynomial time algorithm to solve the problem.
4.2. Algorithm
In this subsection, we consider the structure of the problem of minimizing the number of charging cycles of a single device. To tackle this problem, we first restrict ourselves to instances in which the naive local schedule drops below the zero state of charge only on the last block and never gets above the capacity C. The derived results for these specific instances form the base to solve the general case. Note, that in the restricted instances, satisfies the SoC constraints (11) for all blocks, but the last, by having . Furthermore, no feasible schedule can have fewer switches than , since within , the device is used as little as possible while satisfying (10). We first observe that feasible schedules that discharge differently than do not need to be considered.
Lemma 4. Any optimal schedule S for a restricted instance can be changed to a schedule with exactly the same discharging as while remaining optimal.
Proof. First, note that S cannot do less discharging on any block than , since does the minimal discharging required to satisfy the flow and power constraints (10). Thus, assume S does some extra discharging over . Let be the first block on which S does extra discharging, and let be the difference between the discharging done by S and on . Since S is feasible and in , this extra discharging must be compensated somewhere with extra charging. Let be the first block on which some extra charging is done compared to , and let be the difference between the amount of charging done by S and on . Furthermore, let be the schedule obtained by canceling an amount of extra discharging on and canceling an amount of Δ extra charging on . Note that and , which implies that still satisfies the flow constraints (10). Furthermore, note that only the SoC of the blocks between and changes when obtaining schedule from S.
If , then the SoC of each the blocks in between and decreases by Δ. However, the SoC of each of these blocks is bounded from below by their SoC in due to the minimality of n. Thus, it cannot drop below zero by the feasibility of for all blocks besides . If on the other hand, , the SoC of each block between and increases by Δ, but the SoC of each of these blocks is bounded from above by their SoC in S due to the minimality of m. Thus, it cannot rise above C by the feasibility of S.
The above argument can be repeated while there is at least one block on which more discharging is done by S than by . Note that each update of S only cancels out some charging and discharging, which implies that the number of switches cannot increase while updating S. Thus, S remains optimal after the update. Finally, note that after each update in at least one extra block, the charging/discharging of S and coincide, which concludes the proof. ☐
As a consequence of Lemma 4, for the considered restricted instances, we can take the naive local schedule
as a basis and only add extra charging on some of the blocks. Since
only discharges on blocks where it is required to do so by the flow and power constraints (10), the extra charging can only be done on blocks that are not used to discharge in
. However, not all of these blocks have the same potential for charging extra without violating either the flow and power constraints (10) or the SoC constraints (11). From the flow and power constraints (10), it follows that block
cannot be used for more than
extra charging. Furthermore, from the SoC constraints (11), it follows that the potential for extra charging of block
is also limited by
for
. This leads to the following definition:
Definition 5. Given a schedule S and a block , the potential for extra charging on in S, denoted by , is given by .
Clearly, only the blocks with are of interest for updating a given schedule S. Thus, the optimal schedule may be obtained from by iteratively doing an extra charging of at most units on block . This is done until the SoC at block is exactly zero, to ensure optimality in a more general setting later on.
Let us consider the blocks on which extra charging is possible within a schedule S, i.e., those blocks with positive potential for extra charging. As by Lemma 4, we only have to consider schedules that do exactly the same discharging as , this implies that any block in S that is used for discharging cannot have any potential for extra charging. This means that a block can only be used for extra charging in S if it is currently not used to discharge, i.e., if in S. If a block is already used for charging, any extra charging done on this block does not increase the number of switches. Furthermore, any block that is unused in a schedule S (i.e., ) must also be unused in , since by Lemma 4, for these blocks, we can only consider extra charging. By maximality of the blocks with respect to inclusion, it follows that both neighboring blocks and of an unused block must be used for either charging or discharging in . Again, by Lemma 4, this implies that both and must be used for charging or discharging in S. Doing extra charging on in S now only causes two extra switches when both and are used for discharging. Note that in this case, any feasible schedule is discharging on both of these blocks.
Based on the above, we may partition the set of blocks that can be used for extra charging into two sets
and
, those that cause extra switches when used for extra charging and those that do not:
Note that for any block used for discharging on schedule S, it holds that , since by Lemma 4, we only consider extra charging over . Thus, any block in must either be used for charging or has a neighboring block that is used for charging. In either case, any extra charging done on S cannot change this. Thus, any update to S by doing extra charging cannot cause a block in to become an element of instead. On the other hand, a block in can only become an element of , if it is used for extra charging (without completely depleting its potential for extra charging).
As a consequence, the blocks in are preferred to be used over the blocks in . In fact, it is always optimal to first use the blocks of to their maximal potential, as shown in the following lemma.
Lemma 6. Let S be a feasible schedule for a restricted instance, obtained from by doing some extra charging, and let and be the collections of blocks, from and , respectively, which are used for extra charging. Furthermore, let be the schedule that is obtained from by only doing the extra charging of S on the blocks in . Furthermore, assume , and let be in . Finally, let be the first block in and the amount of extra charging done on . Then, the schedule obtained from S by shifting extra charging from to is also a feasible schedule with at most the same number of switches as S.
Proof. Let be the schedule obtained by the shift. First note that the shift of the extra charging between and cannot introduce a violation of the flow and power constraints (10). Furthermore, in , the SoC is only changed for the blocks between and compared to S. First, assume that . Then, the SoC of these blocks between and is decreased by . Since S and, thus, only does extra charging over , it follows that the SoC of the blocks in between and in is bounded from below by the SoC of these blocks in . Thus, the decrease in SoC cannot cause a drop of the SoC below zero. Next, assume that . Then, the SoC of the blocks between and rises by . However, by construction, , and all other blocks in lie after . From this, it follows that the SoC of the blocks between and cannot increase above C. Finally, note that at most one extra block is used for extra charging in compared to S, but this block belongs to ; thus, no switches are introduced by the shift of charging from to . ☐
Lemma 6 shows that, while updating into a feasible schedule by extra charging on certain blocks, the blocks of can be preferred. However, as extra charging on some block can decrease the potential of other blocks, the question remains in what order the blocks from should be used for extra charging.
Lemma 7. Consider a restricted instance with a naive local schedule . Then, exactly one of the following two cases holds: let S be any schedule obtained from by (only) extra charging on the blocks of for which .There is a unique block , such that it is the last block with in any schedule S, that (only) does extra charging on blocks of and for which . Furthermore, for any such schedule, all blocks after have .
In any schedule S that (only) does extra charging on blocks of and for which , all blocks have .
Proof. Let S be an arbitrary schedule that is obtained from by charging extra only on the blocks from , such that . Furthermore, assume that for all blocks in schedule S. By assumption, it holds that for every block in S. Since is an upper bound for any block in any schedule, it follows that no block can reach an SoC of C for any schedule. Thus, if there is a single schedule for which the SoC never reaches C, then no schedule can reach an SoC of C.
It remains to show that, for schedules that reach an SoC of C for some block, the last block for which this occurs is the same. Let S and be two such schedules, and let and be the last block for which S, respectively , reaches an SoC of C. Without loss of generality, let , and assume . Since on schedule S, cannot do more extra charging before than S does. Furthermore, note that for all blocks with , since . Thus, for any block with , it must hold that . From this, it follows that the total amount of extra charging done by before is bounded from above by the total amount of extra charging done by S before . Thus, is at least as high in S as it is in . From this, it follows that in S, which is a contradiction with the assumed maximality of . Thus, it follows that . ☐
From Lemma 7, it follows that the blocks from that are used for extra charging can be picked in arbitrary order. The blocks in , however, require some more consideration, since extra charging on one of those blocks adds two switches to the objective value. Thus, intuitively, it makes sense to consider the blocks that have the highest potential, which is in fact optimal, as shown in the following lemma.
Lemma 8. Let S be the schedule that is obtained from by iteratively doing extra charging on the blocks in until . We define and iteratively construct a schedule for as follows:Pick block T from with maximal , and let denote the index of this block.
Construct from by doing an extra charging on of .
Repeat this process until or . Then, in the first case, the obtained solution minimizes the number of switches made, and in the second case, no feasible solution exists. Proof. Let be an optimal schedule with that is obtained from by doing extra charging on some blocks. By Lemmas 6 and 7, we can assume that and S (and thus, do exactly the same extra charging on the blocks in . Furthermore, let be the smallest index for which the extra charging done by is different to that of on . Since for an extra charging of is done on , it cannot happen that does more extra charging on than does. Let be the difference between the amount of extra charging that is done by and on . As for schedule , there must also be a block on which does more extra charging than . Let be the first of these blocks, and let be the difference between the charging done by and on .
We change schedule to a schedule by shifting an amount of extra charging equal to from to . This clearly does not violate the flow and power constraints (10). Furthermore, it only changes the SoC of the blocks between and . If , then the SoC is reduced by Δ for these blocks. Since and, thus, , only does extra charging compared to , it follows that the SoC of the blocks between and cannot drop below zero after the shift. Furthermore, if , the SoC of the blocks in between and is increased by Δ. However, by the minimality of , does no more extra charging on any block between and than . Thus, by the feasibility of , the SoC cannot rise above C for these blocks in .
It remains to consider the objective value of the two schedules. If also uses for extra charging, no more switches are introduced. Thus, let us now assume that did not use at all, meaning that in , two switches are introduced around . However, by the maximality of , cannot do more extra charging on than does on . This implies that , and therefore, two switches around in disappear in , meaning that the total number of switches does not increase by the shift.
The above argument can be repeated while there is a difference between and for some . Eventually, will be the same as , without having increased the number of switches, which proves the optimality of .
In case the above procedure concludes that the given (restricted) instance is infeasible, it means that all blocks no longer have any potential for charging extra energy. This implies that for any block either or there is a block with , while remains less than zero. Since no schedule can do more extra charging than is done by the infeasible schedule above, it follows that the instance is indeed infeasible. ☐
From the above Lemmas 4–8, we obtain an algorithm to solve the restricted instance of in a straightforward way. This algorithm is given as Algorithm 1.
| Algorithm 1 Updating for a single SoC violation at the end. |
- 1:
An instance of for which the only infeasibility of occurs on block , having . - 2:
Set - 3:
while S is infeasible do - 4:
if then - 5:
Let be the first block in . - 6:
Update S by extra charging as much as possible on while keeping . - 7:
else if then - 8:
Let be such that it has the highest potential for extra charging among the blocks in . - 9:
Update S by extra charging as much as possible on while keeping . - 10:
else - 11:
Return: infeasible. - 12:
end if - 13:
end while - 14:
Return: Schedule S.
|
Using the results obtained until now, we can solve instances with a dip below zero SoC at the very end. Furthermore, note that an instance with an overflow of the state of charge for the last block is somehow symmetric and can be solved in the same manner. Now, extra discharging needs to be done before . The available potential for extra discharging on block is given by . Furthermore, a block now only causes extra switches if used for extra discharging when it is currently not used for discharging and its neighboring blocks are used for charging. Thus, and should be adapted to reflect this. It should be clear that analogues of Lemmas 4–8 hold, and modifying Algorithm 1 by changing and accordingly solves this case to optimality.
With the results till now, fixing a single violation of the SoC constraints (11) at the very end of the schedule is possible. By this, also a single violation anywhere in the schedule can be fixed by considering the instance up to the block on which the violation occurs. If the resulting schedule introduces no further violations, the instance is solved to optimality by Algorithm 1. However, the case when there are more violations or the application of Algorithm 1 introduces another violation remains. This case can be solved by iterative applications of Algorithm 1, as shown in the following theorem.
Theorem 9. The optimization problem for a single device can be solved in polynomial time by iteratively applying Algorithm 1.
Proof. From the Lemmas 4–8, it follows that a single violation of the SoC bounds in can be solved by a single application of Algorithm 1. Let be the block on which the first violation occurs in and assume without loss of generality that in . To fix this violation, the only options are to charge extra before . Thus, an application of Algorithm 1 up to fixes this with a minimal increase of the number of switches. Let be the block on which the next violation occurs after the application of Algorithm 1. Note that . We distinguish two cases:
Case 1 : After the application of Algorithm 1, we have that and . Thus, this schedule has a decoupling point (see Definition 3) with . This means that only the blocks between and can be used to overcome the infeasibility in , and therefore, an application of Algorithm 1 to the blocks between and gives an optimal schedule for the blocks between and . This optimal schedule can be combined with the schedule obtained for blocks up to to an optimal schedule up to .
Case 2 : Let S be the schedule obtained by applying Algorithm 1 up to block . Furthermore, let be an optimal schedule for the instance up to block . Because is feasible, at least as much extra charging is done on before as on S. Similarly, as in the proofs of the Lemmas 7 and 8, the extra charging that is done differently between and S can be shifted in to match the extra charging done by S without increasing the number of switches.
Now, let be the schedule obtained from S by applying Algorithm 1 up to block . Furthermore, let Δ be the amount of extra charging done on compared to S to fix this violation. Since is feasible, at least Δ units of extra charging must also be done extra on compared to S. Once more, the extra charging that is done differently between and can be shifted to match the extra charging done by S without increasing the number of switches.
Thus, the result is that can be changed to without increasing the number of switches, proving the optimality of . Finally, the above procedure can be repeated iteratively until all of the violations are fixed. ☐
Theorem 9 proves that iterative applications of Algorithm 1 can be used to solve a general instance of to optimality. The result is summarized in Algorithm 2.
The worst case running time of Algorithm 2 is , with N the total number of blocks considered. This follows from the fact that constructing can be done in time . Furthermore, at most N calls of Algorithm 1 are done, with each taking time . Finally, keeping track of the last decoupling point can be done in time .
Note that N is not the number of time intervals, but the number of blocks. These blocks are consecutive time intervals on which a feasible schedule either has to charge, has to discharge or does not need to use the device to satisfy the flow constraints (4). In general, for practical applications, this number N may be much smaller than the number of time intervals T.
| Algorithm 2 Minimizing charging cycles for a single device. |
- 1:
Input: An instance of . - 2:
Take . - 3:
while There are SoC violations in S do - 4:
Determine the first violation in S - 5:
Calculate the last decoupling point in S; if this does not exist, take 0 as the decoupling point. - 6:
Apply Algorithm 1 to the blocks between the decoupling point and the violation. - 7:
end while - 8:
Output: Schedule S.
|



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}