
Multi-Objective Sustainable Operation of the Three Gorges Cascaded Hydropower System Using Multi-Swarm Comprehensive Learning Particle Swarm Optimization


Abstract
:
1. Introduction
2. Related Work
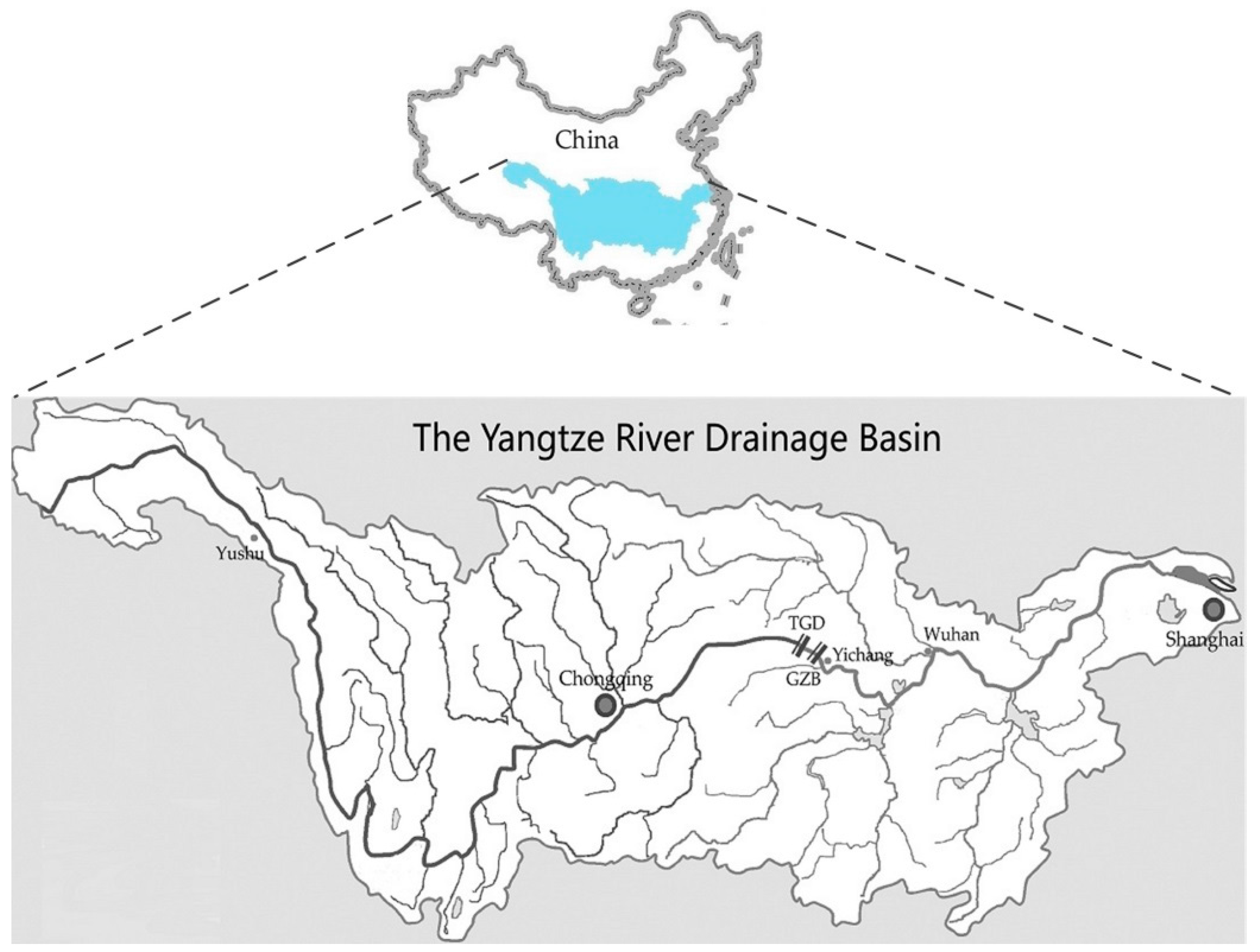
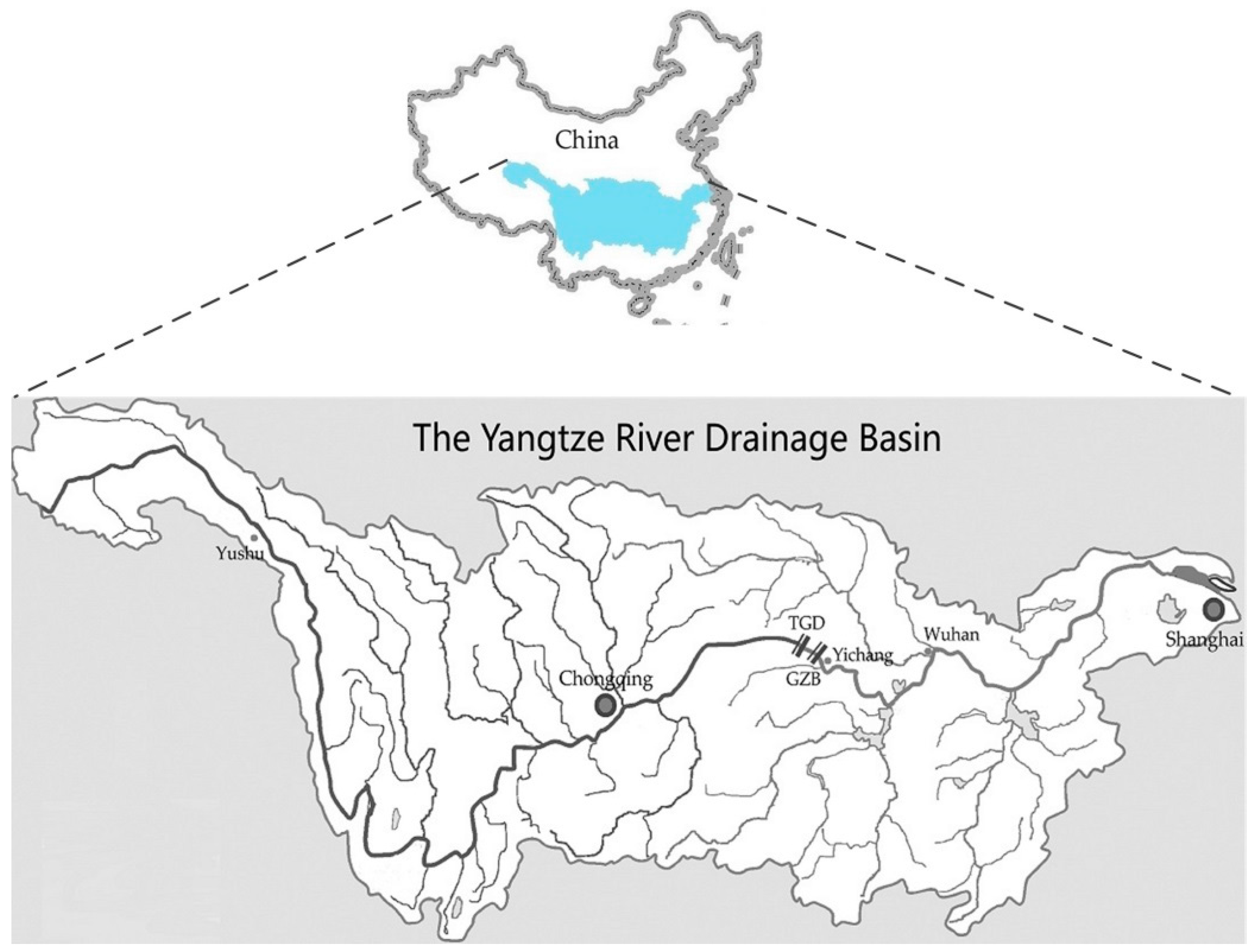
3. Case Study
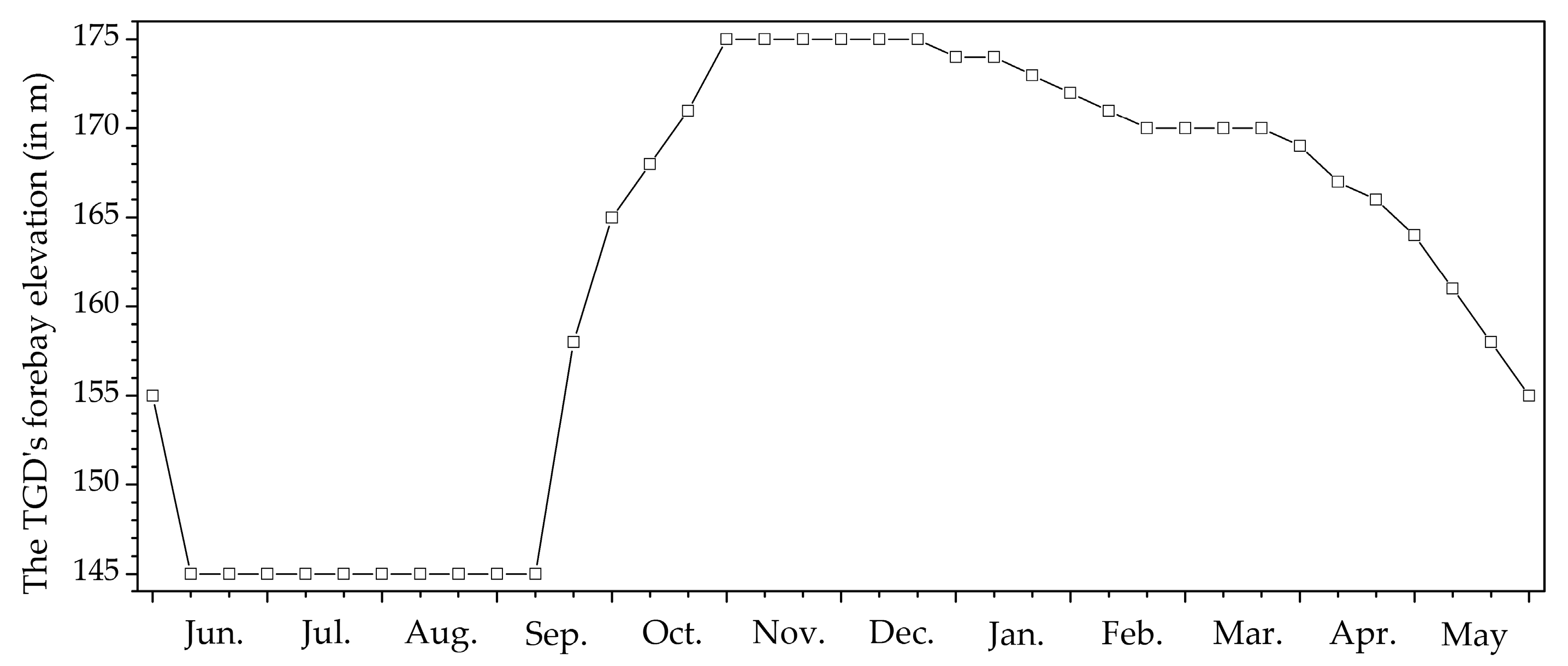
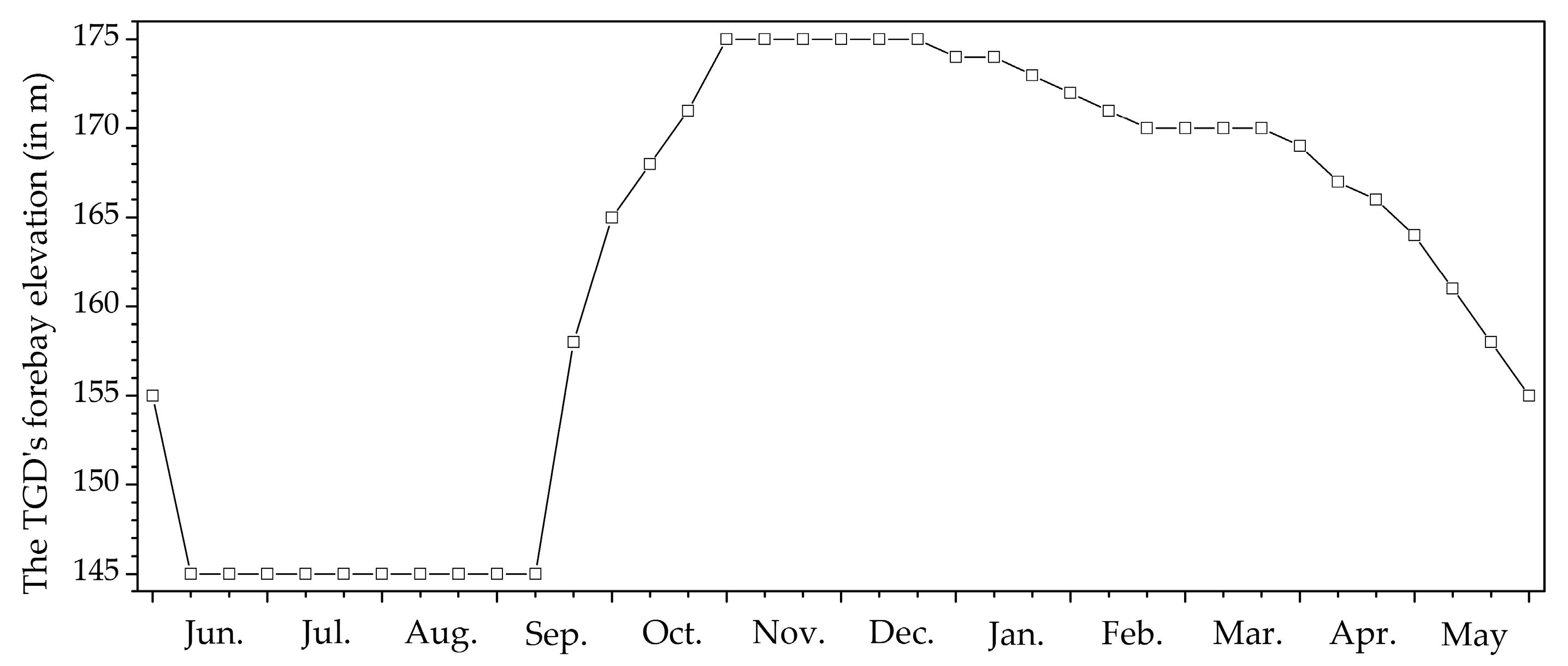
3.1. China’s Three Gorges Cascaded Hydropower System
3.2. Problem Formulation
3.3. Determination of the Outflow Lower Target
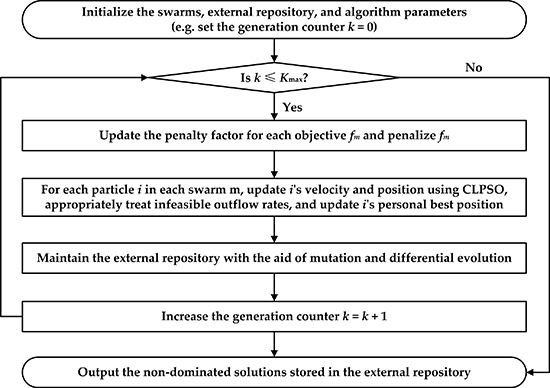
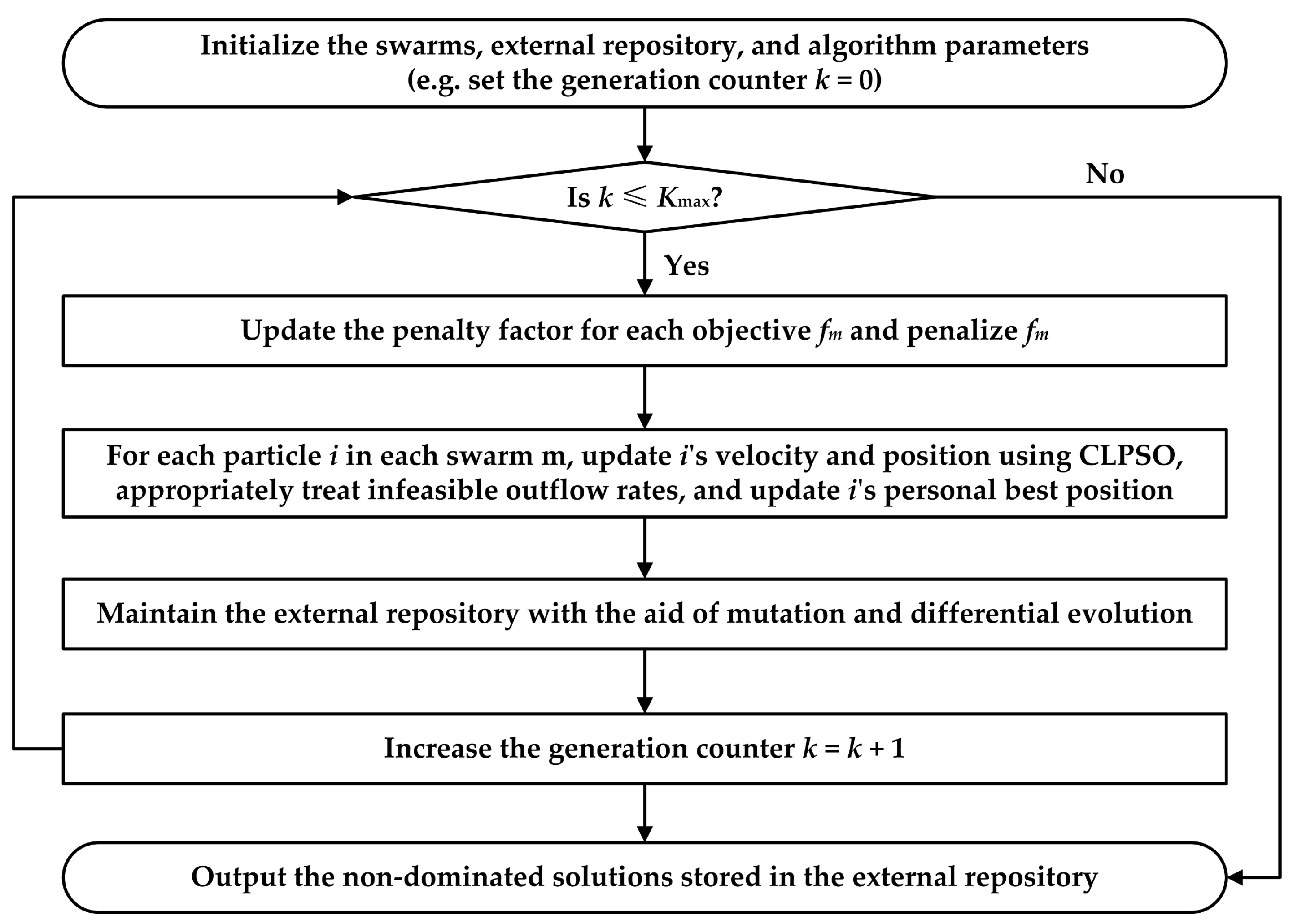
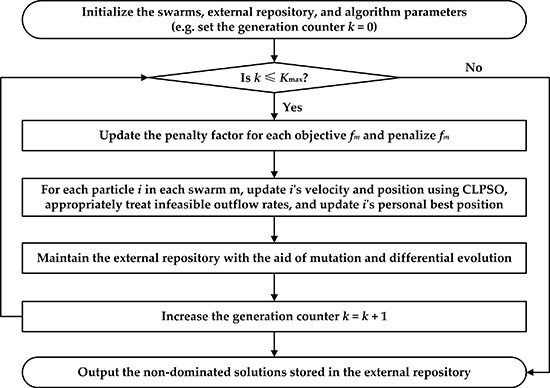
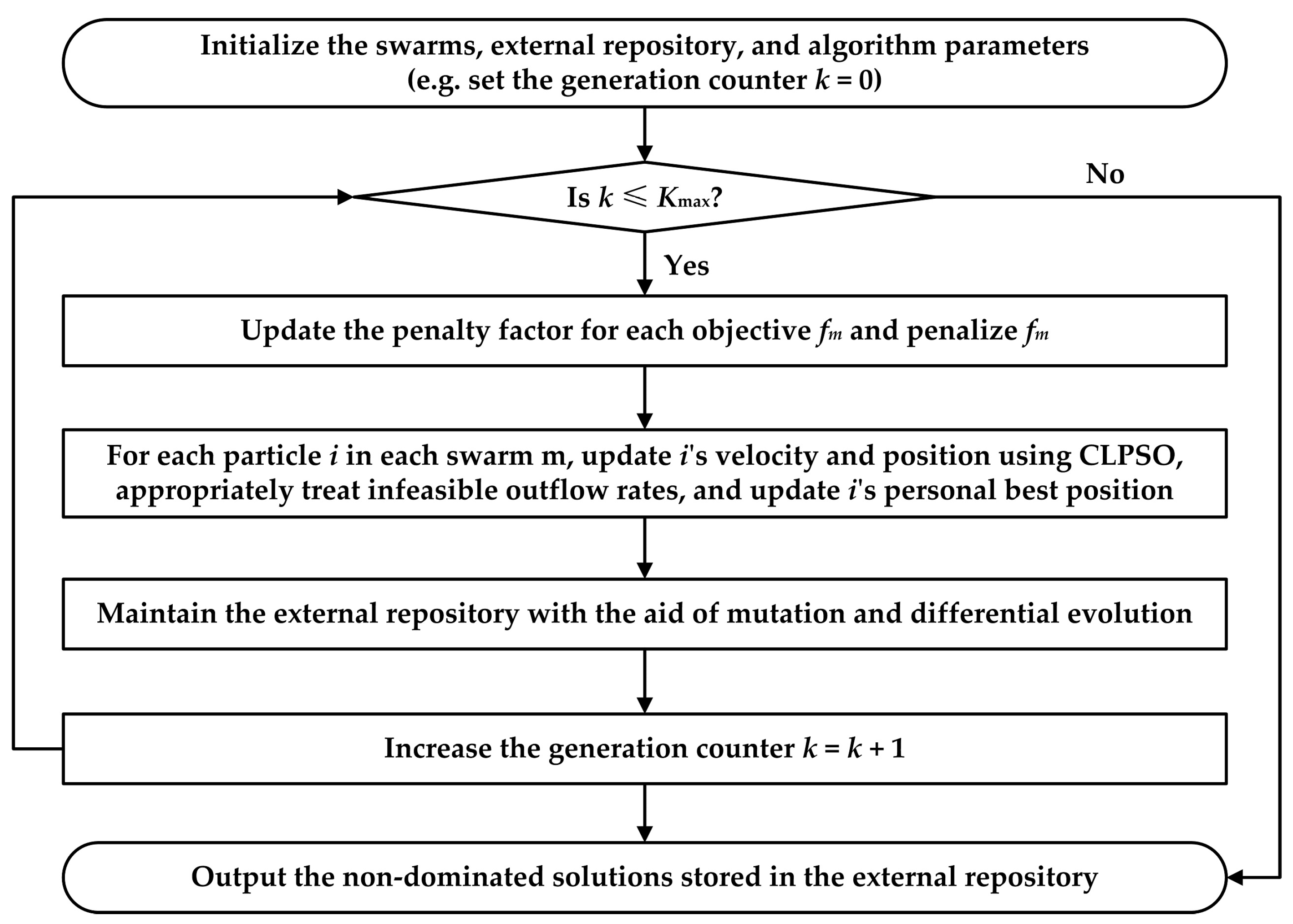
4. Optimization Framework Based on Multi-Swarm Comprehensive Learning Particle Swarm Optimization
4.1. Multi-Swarm Comprehensive Learning Particle Swarm Optimization
4.2. Application Implementation of Multi-Swarm Comprehensive Learning Particle Swarm Optimization
5. Experimental Studies
5.1. Co-Evolutionary Multi-Swarm Particle Swarm Optimization
5.2. Performance Metrics
5.3. Algorithm Parameters
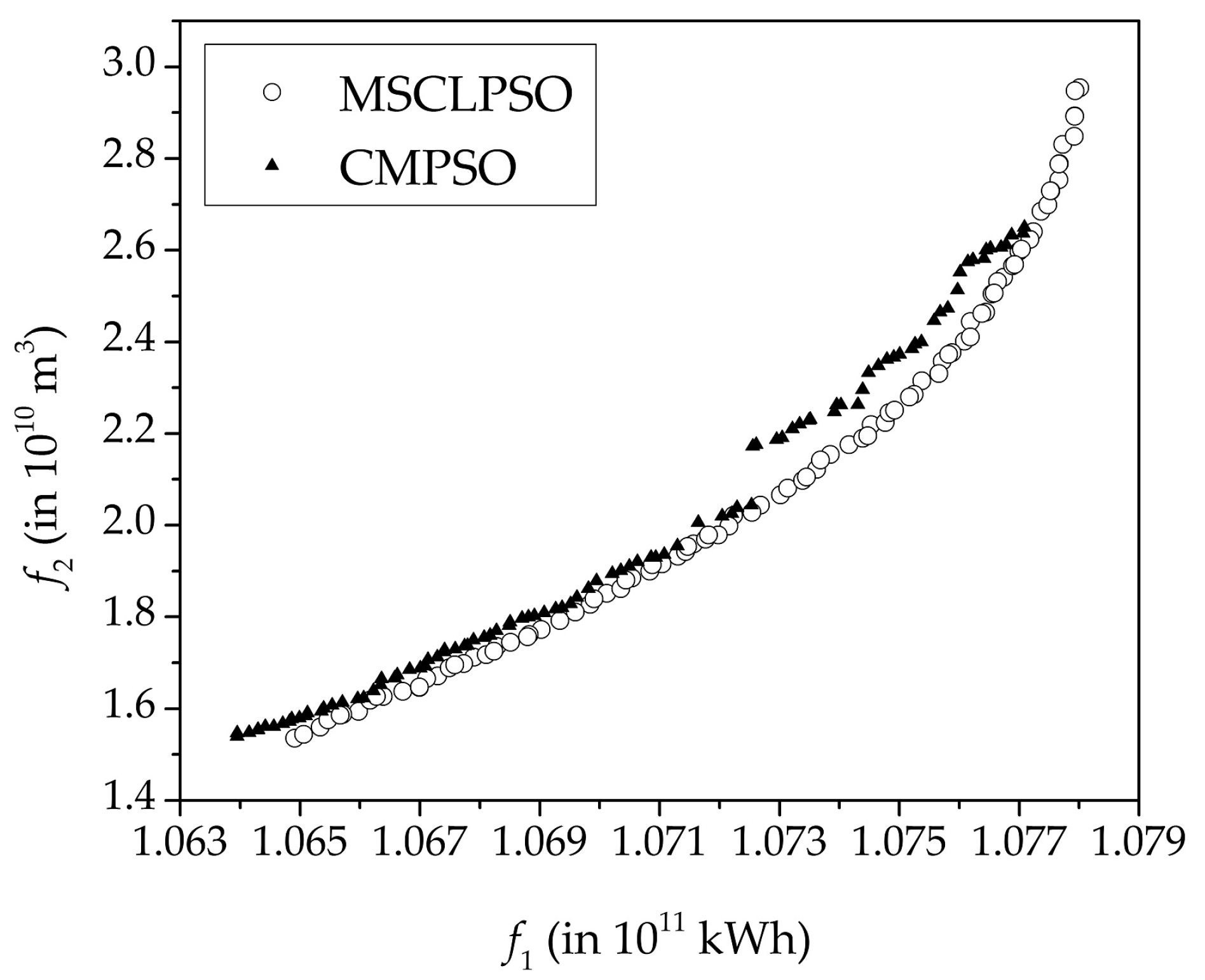
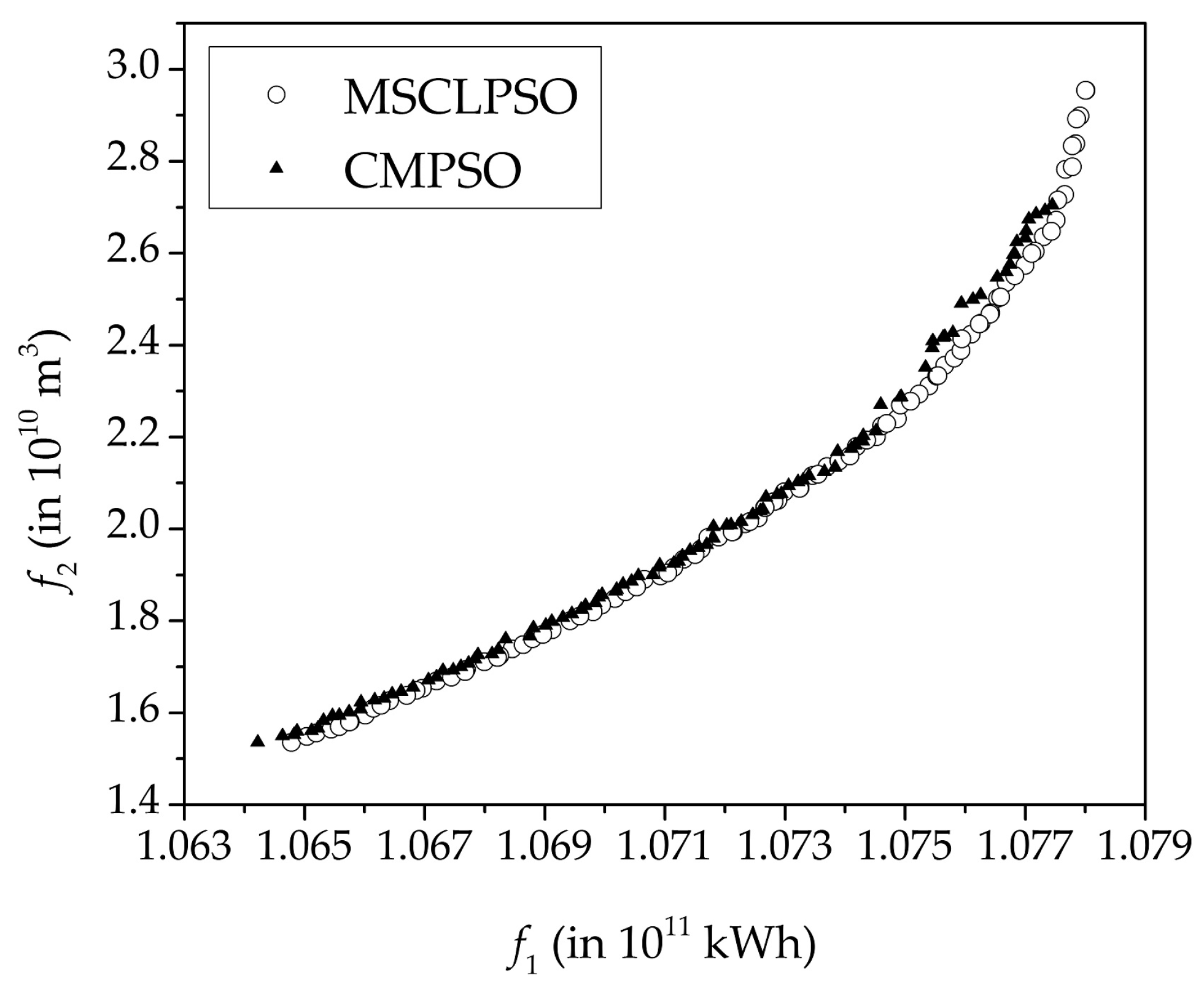
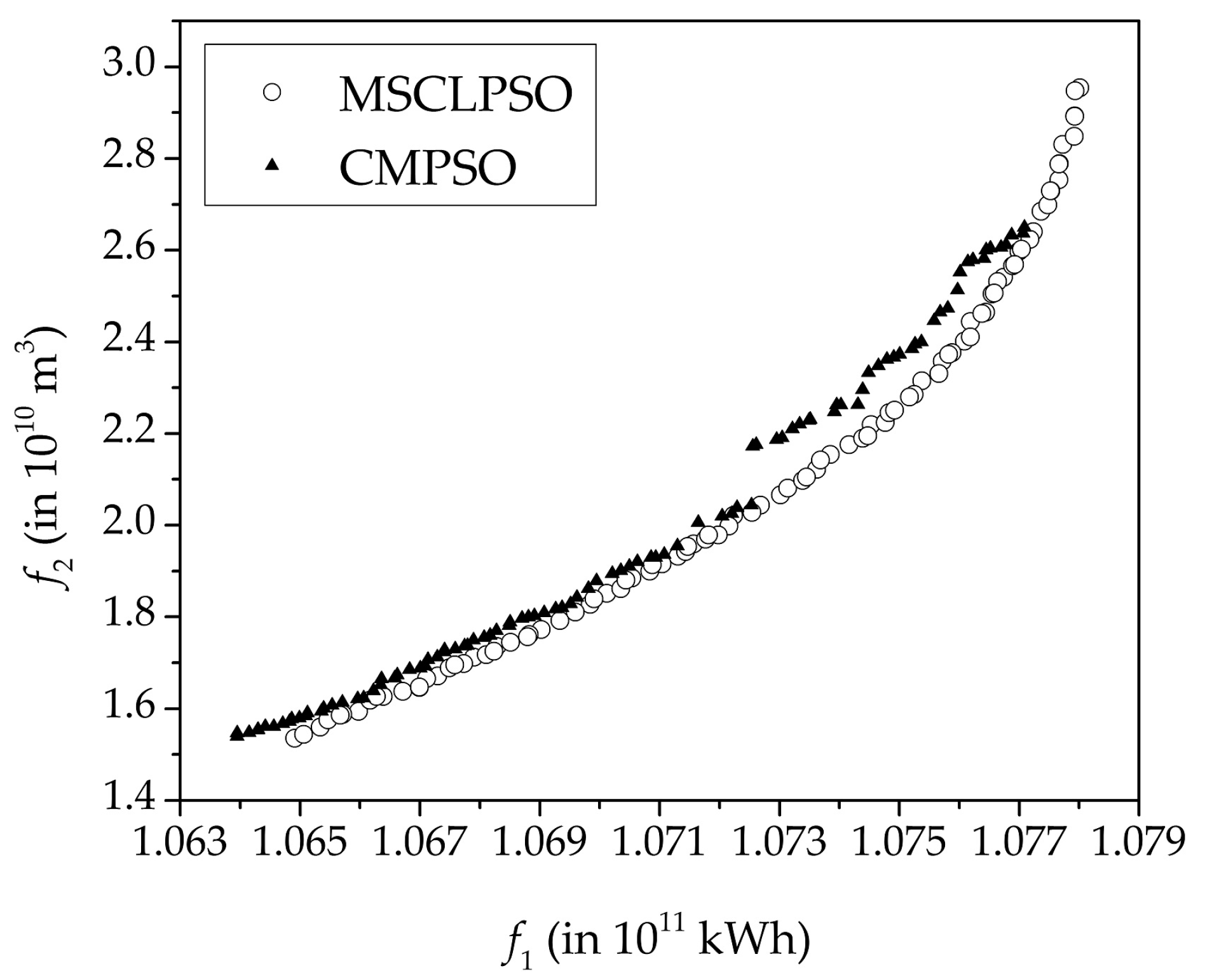
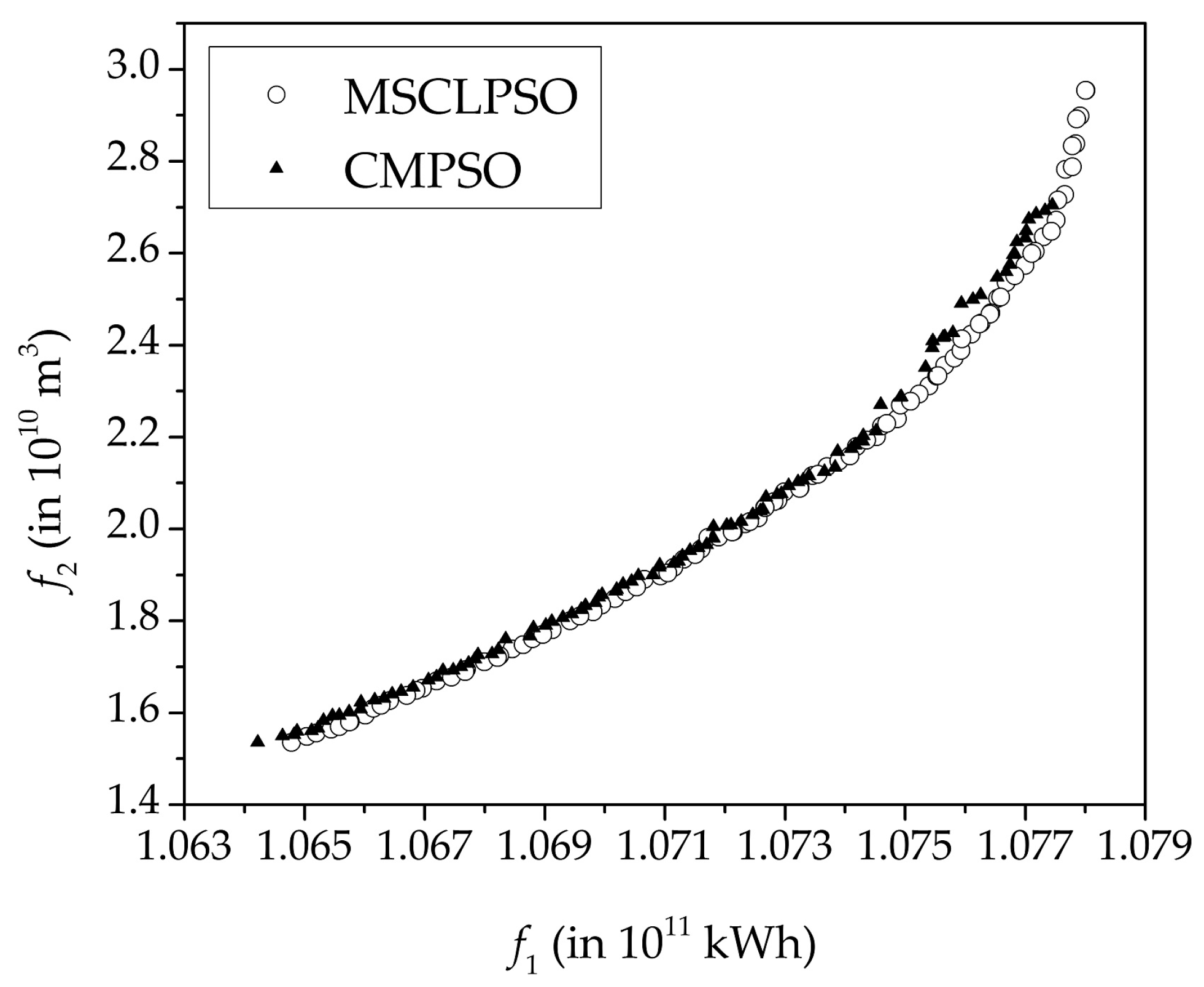
5.4. Experimental Results
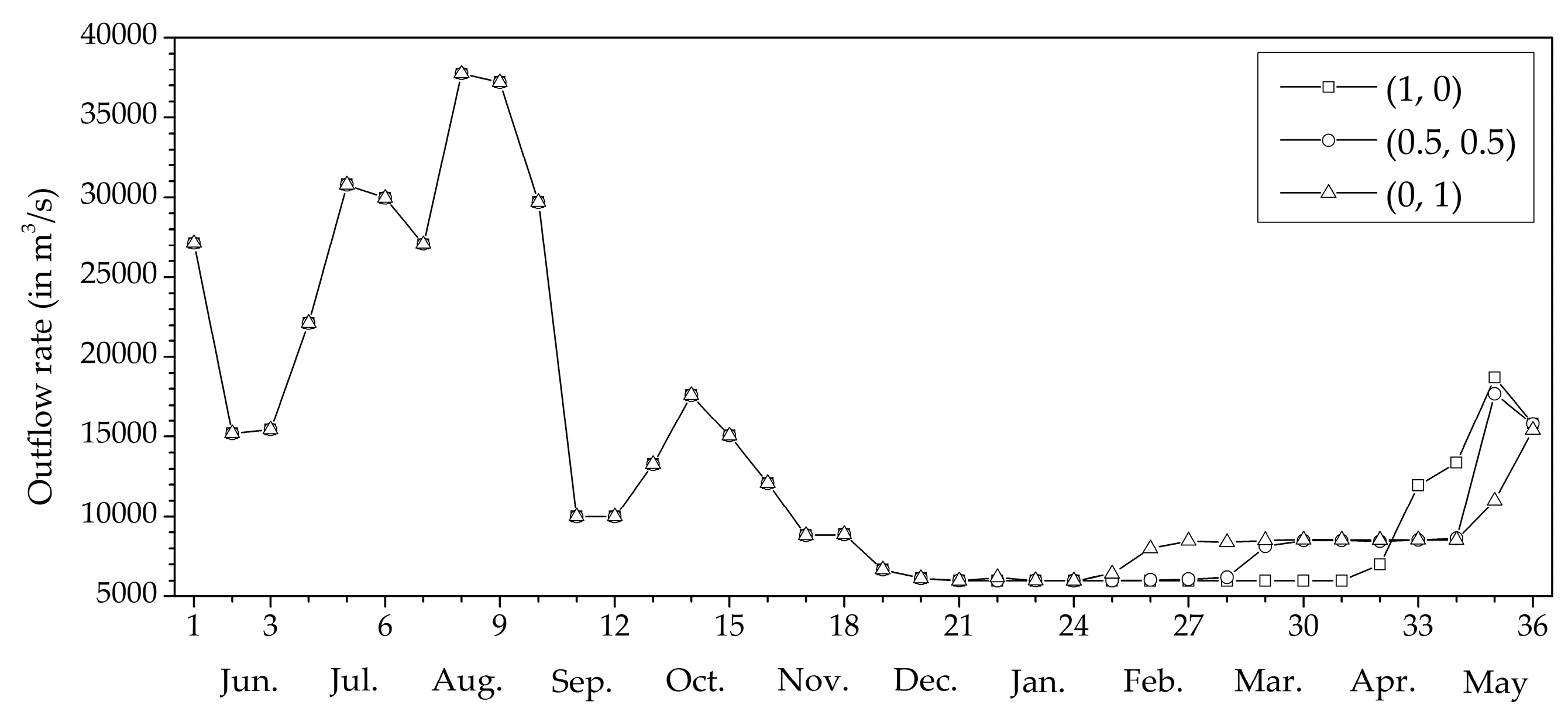
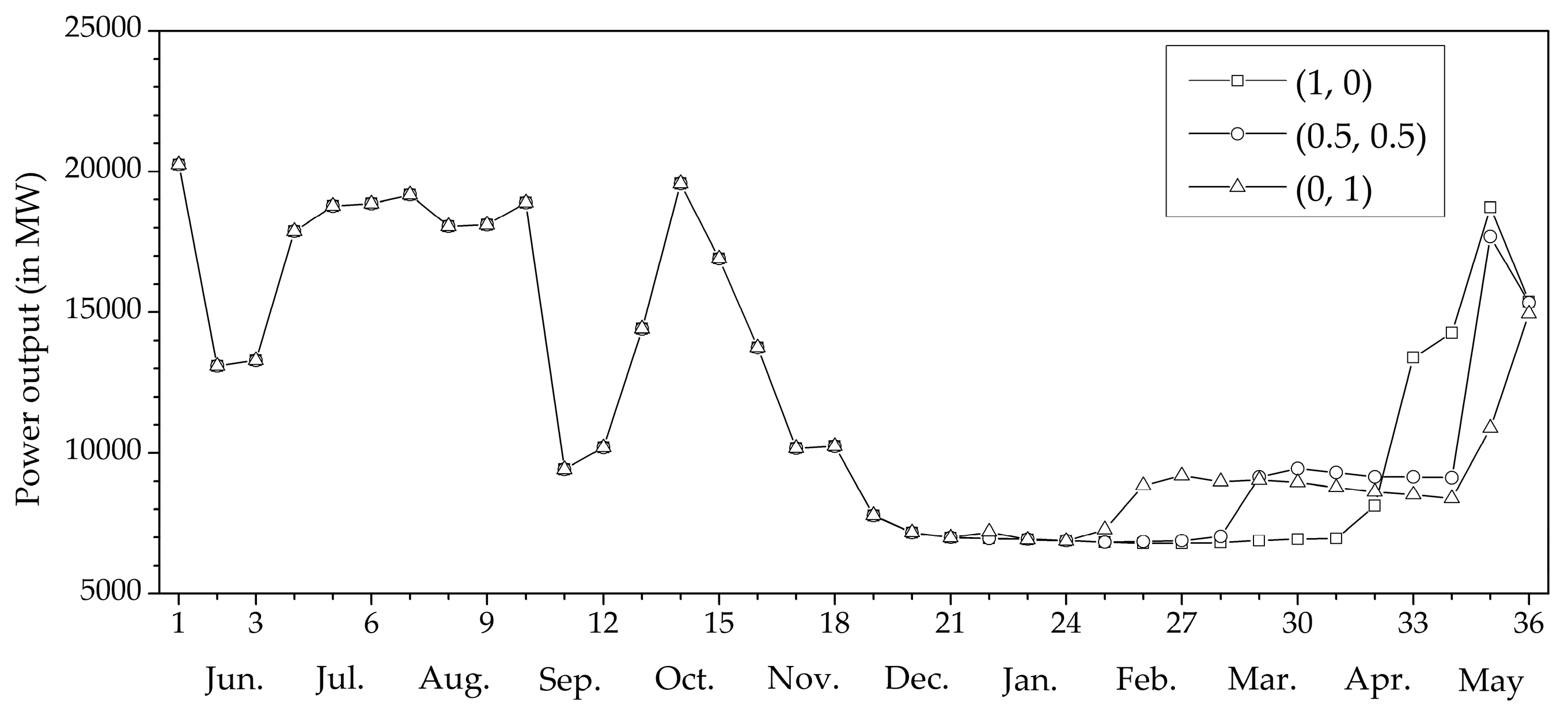
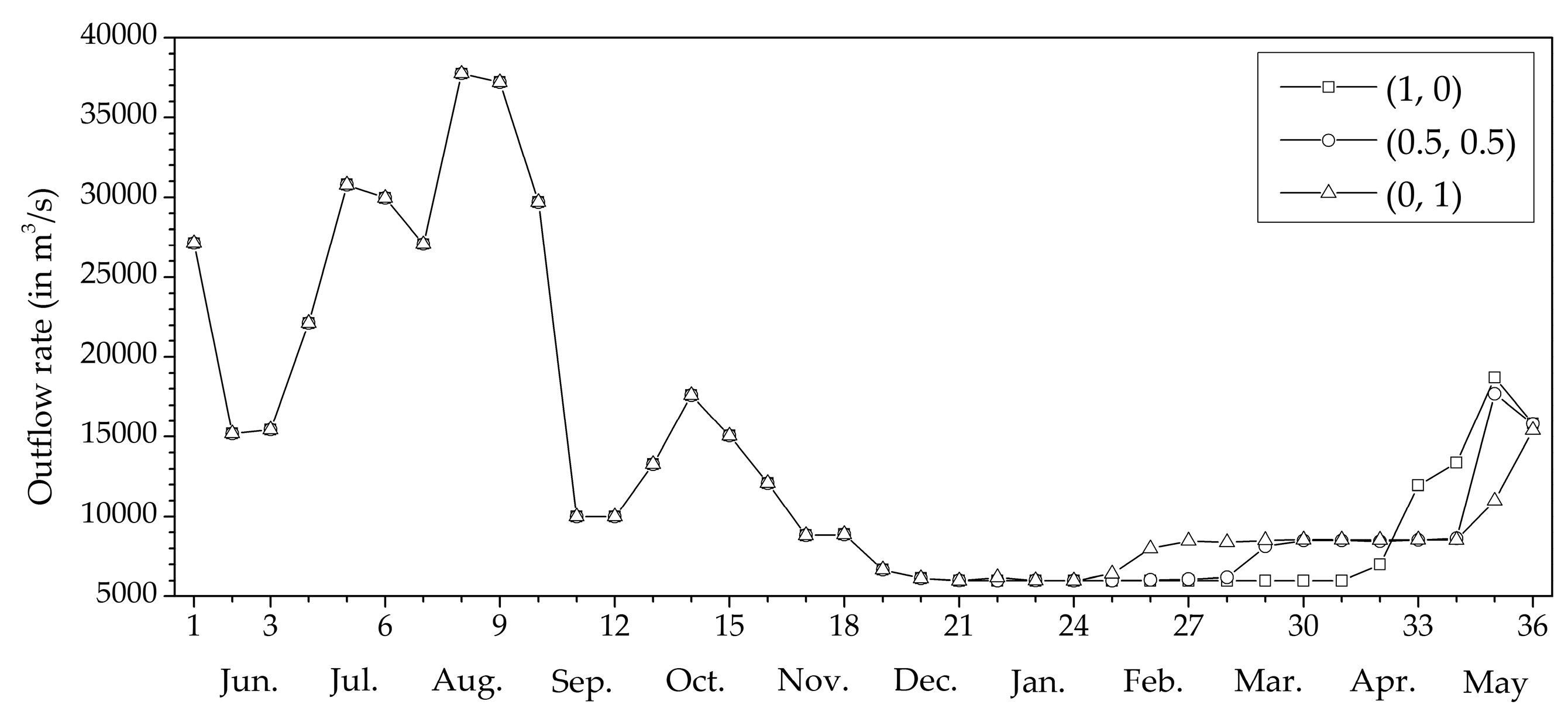
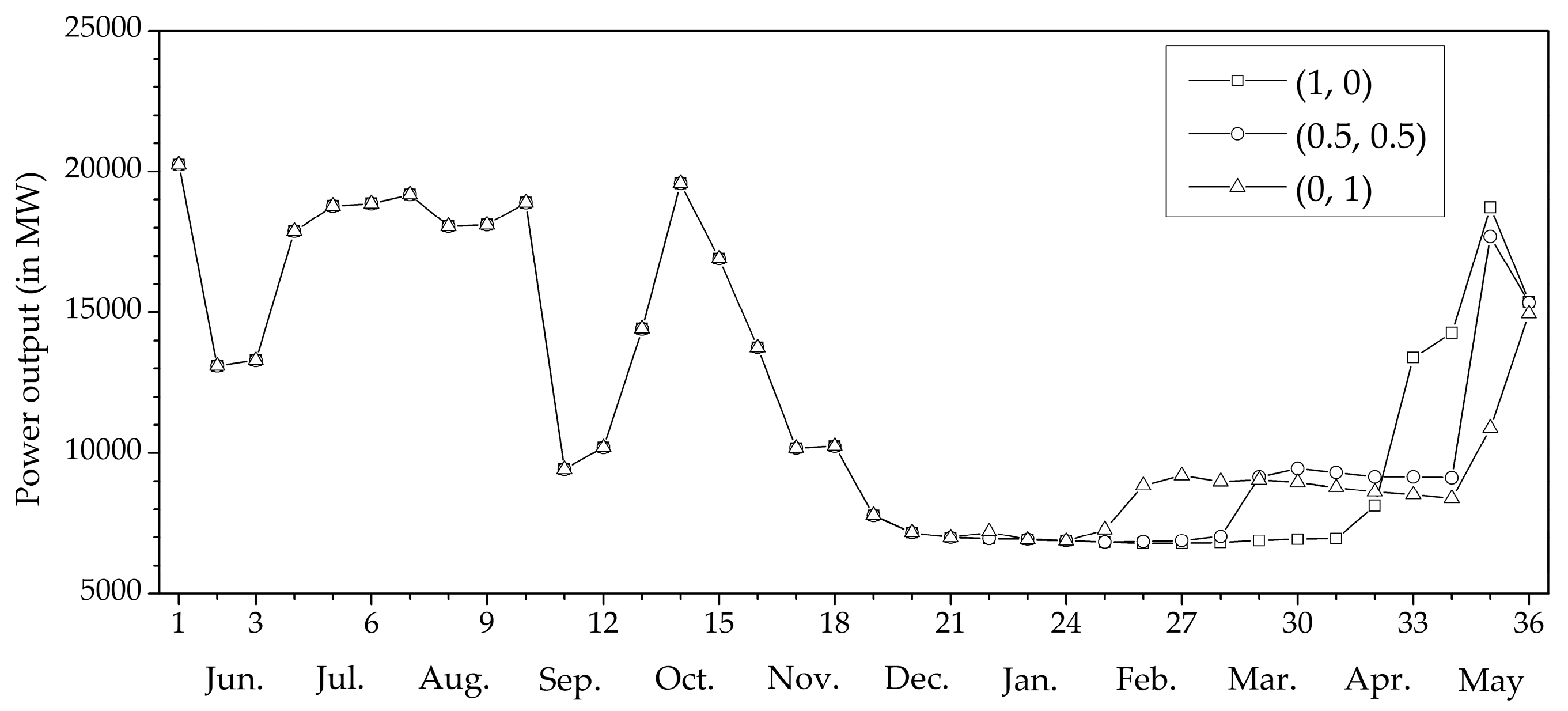
5.5. The Final Tradeoff
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, X.; Yu, X.; Qin, H. Optimal operation of multi-reservoir hydropower systems using enhanced comprehensive learning particle swarm optimization. J. Hydro-Environ. Res. 2016, 10, 50–63. [Google Scholar] [CrossRef]
- Chen, L.; McPhee, J.; Yeh, W.W. A diversified multiobjective GA for optimizing reservoir rule curves. Adv. Water Resour. 2007, 30, 1082–1093. [Google Scholar] [CrossRef]
- Reddy, M.J.; Kumar, D.N. Multi-objective particle swarm optimization for generating optimal trade-offs in reservoir operation. Hydrol. Processes 2007, 21, 2897–2909. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, J.; Fang, N.; Zhang, R.; Zhang, Y. An efficient multi-objective adaptive differential evolution with chaotic neuron network and its application on long-term hydropower operation with considering ecological environment problem. Int. J. Electr. Power Energy Syst. 2013, 45, 60–70. [Google Scholar] [CrossRef]
- Liu, X.; Guo, S.; Liu, P.; Chen, L.; Li, X. Deriving optimal refill rules for multi-purpose reservoir operation. Water Resour. Manag. 2011, 25, 431–448. [Google Scholar] [CrossRef]
- Yang, T.; Gao, X.; Sellars, S.; Sorooshian, S. Improving the multiobjective evolutionary optimization algorithm for hydropower reservoir operations in the California Oroville-Thermalito complex. Environ. Model. Softw. 2015, 69, 262–279. [Google Scholar] [CrossRef]
- Zhang, R.; Zhou, J.; Wang, Y. Multi-objective optimization of hydrothermal energy system considering economic and environmental aspects. Int. J. Electr. Power Energy Syst. 2012, 42, 384–395. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.K.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Cohon, J.L.; Marks, D.H. A review and evaluation of multiobjective programming techniques. Water Resour. Res. 1975, 11, 208–220. [Google Scholar] [CrossRef]
- Miettinen, K. Nonlinear Multiobjective Optimization; Kluwer Academic Publishers: Boston, MA, USA, 1999. [Google Scholar]
- Schardong, A.; Simonovic, S.P.; Vasan, A. Multiobjective evolutionary approach to optimal reservoir operation. J. Comput. Civil Eng. 2012, 27, 139–147. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, J.; Lu, Y.; Li, Y.; Zhang, Y. Multi-objective cultured differential evolution for generating optimal trade-offs in reservoir flood control operation. Water Resour. Manag. 2010, 24, 2611–2632. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, J.; Zhang, Y.; Qin, H.; Liu, L. Novel multiobjective shuffled frog leaping algorithm with application to reservoir flood control operation. J. Water Resour. Plan. Manag. 2010, 136, 217–226. [Google Scholar] [CrossRef]
- Yu, X.; Zhang, X. Multiswarm comprehensive learning particle swarm optimization for solving multiobjective optimization problems. Swarm Evolut. Comput. 2016. submitted. [Google Scholar]
- Zhan, Z.; Li, J.; Cao, J.; Zhang, J.; Chung, H.S.; Shi, Y. Multiple populations for multiple objectives: A coevolutionary technique for solving multiobjective optimization problems. IEEE Trans. Cybern. 2013, 43, 445–463. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Li, H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans. Evolut. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Jowett, I.G. Instream flow methods: A comparison of approaches. Regul. Rivers Res. Manag. 1997, 13, 115–127. [Google Scholar] [CrossRef]
- Tharme, R.E. A global perspective on environmental flow assessment: Emerging trends in the development and application of environmental flow methodologies for rivers. River Res. Appl. 2003, 19, 397–441. [Google Scholar] [CrossRef]
- Tennant, D.L. Instream flow regimens for fish, wildlife, recreation and related environmental resources. Fisheries 1976, 1, 6–10. [Google Scholar] [CrossRef]
- Pan, M. Research on Ecological Operation Objectives of Three Gorges Reservoir. Master’s Thesis, Donghua University, Shanghai, China, 2011. [Google Scholar]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evolut. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Kukkonen, S.; Deb, K. A fast and effective method for pruning of non-dominated solutions in many-objective problems. In Proceedings of the 9th International Conference on Parallel Problem Solving from Nature, Reykjavik, Iceland, 9–13 September 2006; pp. 553–562.
- Yu, X.; Zhang, X. Enhanced comprehensive learning particle swarm optimization. Appl. Math. Comput. 2014, 242, 265–276. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evolut. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Schott, J.R. Fault Tolerant Design Using Single and Multicriteria Genetic Algorithm Optimization. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1995. [Google Scholar]
- Laumanns, M.; Thiele, L.; Deb, K.; Zitzler, E. Combining convergence and diversity in evolutionary multiobjective optimization. Evolut. Comput. 2002, 10, 263–282. [Google Scholar] [CrossRef] [PubMed]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making: Methods and Applications; Springer-Verlag: Berlin, Germany, 1981. [Google Scholar]
- Wang, J.; Jing, Y.; Zhang, C.; Zhao, J. Review on multi-criteria decision analysis aid in sustainable energy decision-making. Renew. Sustain. Energy Rev. 2009, 13, 2263–2278. [Google Scholar] [CrossRef]
- Wang, T.; Lee, H. Developing a fuzzy TOPSIS approach based on subjective weights and objective weights. Expert Syst. Appl. 2009, 36, 8980–8985. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SC(MSCLPSO, CMPSO) | SC(CMPSO, MSCLPSO) | ||||||
|---|---|---|---|---|---|---|---|
| Mean | SD | Best | Worst | Mean | SD | Best | Worst |
| 0.88 | 9.30 × 10−2 | 0.99 | 0.66 | 0.02 | 2.12 × 10−2 | 0 | 0.08 |
| MSCLPSO | CMPSO | ||||||
|---|---|---|---|---|---|---|---|
| Mean | SD | Best | Worst | Mean | SD | Best | Worst |
| spacing metric result | spacing metric result | ||||||
| 1.19 × 10−2 | 1.01 × 10−3 | 9.72 × 10−3 | 1.37 × 10−2 | 2.70 × 10−2 | 6.12 × 10−3 | 1.76 × 10−2 | 3.98 × 10−2 |
| Performance Metric | MSCLPSO | CMPSO | |||
|---|---|---|---|---|---|
| Objective 1 | Objective 2 | Objective 1 | Objective 2 | ||
| OPm | Mean | 1.0780 × 1011 kWh | 1.5361 × 1010 m3 | 1.0775 × 1011 kWh | 1.5361 × 1010 m3 |
| Best | 1.0780 × 1011 kWh | 1.5361 × 1010 m3 | 1.0779 × 1011 kWh | 1.5361 × 1010 m3 | |
| Worst | 1.0780 × 1011 kWh | 1.5361 × 1010 m3 | 1.0756 × 1011 kWh | 1.5361 × 1010 m3 | |
| Average VC | 0 | 0 | |||
| Average execution time (in s) | 7.03 | 13.13 | |||
| Best Final Single-Objective Result | MSCLPSO | CMPSO | |||
|---|---|---|---|---|---|
| Swarm 1 | Swarm 2 | Swarm 1 | Swarm 2 | ||
| Fitness | Mean | 1.0780 × 1011 kWh | 1.5361 × 1010 m3 | 1.0752 × 1011 kWh | 1.5361 × 1010 m3 |
| Best | 1.0780 × 1011 kWh | 1.5361 × 1010 m3 | 1.0766 × 1011 kWh | 1.5361 × 1010 m3 | |
| Worst | 1.0780 × 1011 kWh | 1.5361 × 1010 m3 | 1.0726 × 1011 kWh | 1.5361 × 1010 m3 | |
| Average violation cost | 0 | 0 | 4.81 × 10−17 | 0 | |
| Weight | Tradeoff | ||
|---|---|---|---|
| Objective 1 | Objective 2 | Objective 1 | Objective 2 |
| 1 | 0 | 1.0780 × 1011 kWh | 2.9545 × 1010 m3 |
| 0.5 | 0.5 | 1.0741 × 1011 kWh | 2.1589 × 1010 m3 |
| 0 | 1 | 1.0648 × 1011 kWh | 1.5361 × 1010 m3 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, X.; Sun, H.; Wang, H.; Liu, Z.; Zhao, J.; Zhou, T.; Qin, H. Multi-Objective Sustainable Operation of the Three Gorges Cascaded Hydropower System Using Multi-Swarm Comprehensive Learning Particle Swarm Optimization. Energies 2016, 9, 438. https://doi.org/10.3390/en9060438
Yu X, Sun H, Wang H, Liu Z, Zhao J, Zhou T, Qin H. Multi-Objective Sustainable Operation of the Three Gorges Cascaded Hydropower System Using Multi-Swarm Comprehensive Learning Particle Swarm Optimization. Energies. 2016; 9(6):438. https://doi.org/10.3390/en9060438
Chicago/Turabian StyleYu, Xiang, Hui Sun, Hui Wang, Zuhan Liu, Jia Zhao, Tianhui Zhou, and Hui Qin. 2016. "Multi-Objective Sustainable Operation of the Three Gorges Cascaded Hydropower System Using Multi-Swarm Comprehensive Learning Particle Swarm Optimization" Energies 9, no. 6: 438. https://doi.org/10.3390/en9060438