To increase the reliability of a power system, many factors can cause failure of protection and there is always a possibility of a failure of the Circuit Breaker (CB). For this reason, it is necessary to supplement the primary protection strengthened by the backup protection in the network and make sure that nothing can prevent elimination of a failure of the system. The proposed protection scheme consists of two main stages. The proposed protection scheme consists of two main stages. The mainly used HSBP algorithm to identify the fault as primary protection and promotion by the method of
THD detection used to complement the performance of the backup protection and then the second stage works ANFIS as a decision maker send to run the circuit breaker. As a result, the relay will trip and isolate the faulted section, leaving the rest of the network unaffected. The faulted phase can then be identified very clearly. Variation of the fundamental is used to identify the fault. As will be seen from the results presented in the next section, it is important to emphasize that HSBP could be applied to both instantaneous values as well as the phasors [
11]. The ANFIS is a fuzzy Sugeno model of integration, where the final fuzzy inference system output is optimized through the training of ANNs. ANN has a good capacity of pattern recognition. It was concluded from a theoretic analysis that a perception neuron could realize protection based on ratio HSBP theory. Furthermore, a multi-layer ANN of protection model was advanced that was characterized by non-liner theory.
3.1. Proposed Algorithm of Hilbert Space-Based Power (HSBP) for Protection
The instantaneous reactive power theory, also named the “p-q” formulation, as introduced by Akagi in [
19,
20], is based on the Clarke coordinates transformation. The voltage and current vectors in phase coordinates corresponding to a three-phase system are expressed as follows:
Three-phase instantaneous voltage and current can be expressed as instantaneous space vectors. Applied to the voltage and current vectors in
A-B-C phase coordinates, they can be transformed into
αβ0 orthogonal coordinates through transformation. The new coordinates system is based on a transformation using Equations (2) and (7) [
19]:
Equations (3)–(6) define the three power variables that are applied to the voltage and current vectors in phase coordinates: zero-sequence instantaneous real power
, instantaneous real power
, and instantaneous imaginary power
:
The “p-q” formulation defines the generalized instantaneous power
and instantaneous reactive power vector
in terms of the
components. The instantaneous active and reactive power of the three phases can be defined as follows. From this equation, the current may be expressed according to the power quantities:
where
On the other hand, if currents and power levels are known variables, voltages can be given by applying the inverse matrix in Equation (4). For the instantaneous current in
αβ orthogonal coordinates and the instantaneous active current and instantaneous reactive current in
αβ orthogonal coordinates, the following expressions are given by these procedures:
The instantaneous voltage and current of the three-phase system are generally regarded as periodic functions of time, so that we can build a periodic function of space as follows:
Then, with the three-phase instantaneous voltage vector u and instantaneous current vector
the inner product in the periodic function space
is defined as follows:
The norm of
is defined as:
The periodic function space
becomes the inner product space and Hilbert space. Analogously, the
n-dimensional periodic function space is constructed as Equation (13) to the
n-phase system:
and
n-phase instantaneous voltage vector u and instantaneous current vector
i,
The inner product and norm in n-dimensional periodic function space
are defined as:
Therefore, the
n-dimensional periodic function space
becomes the
n-dimensional inner product space and Hilbert space. In
n-dimensional Hilbert space, according to the principle that the active current is the component of phase current that has the minimum average capacity for work, the active current vector
is defined as the projection of the phase current vector
to the phase voltage vector
u as Equation (16) [
21].
The active power
P is defined as the product of the norm of the phase voltage vector
u and the norm of the active current vector
:
The reactive power
Q is defined as the product of the norm of the phase voltage vector
u and the norm of the reactive current vector
:
The apparent power
S is defined as the product of the norm of the phase voltage vector
u and the norm of the phase current vector
:
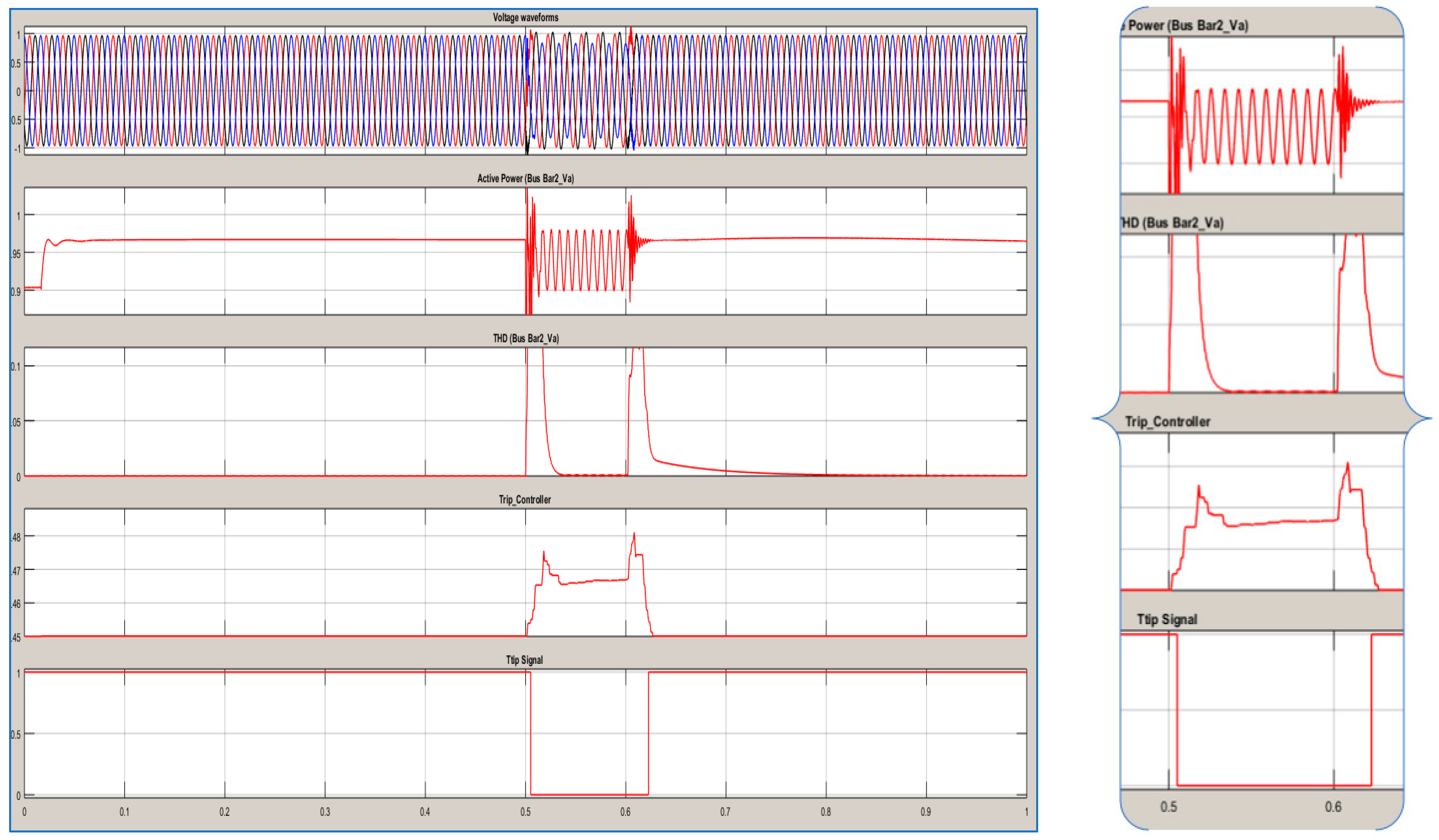
Any disturbance to the main input voltage is reflected as a disturbance in the “p-q” values. Using the disturbed “p-q” values, it is possible to extract the disturbance signal that represents the deviation of the voltage input network.
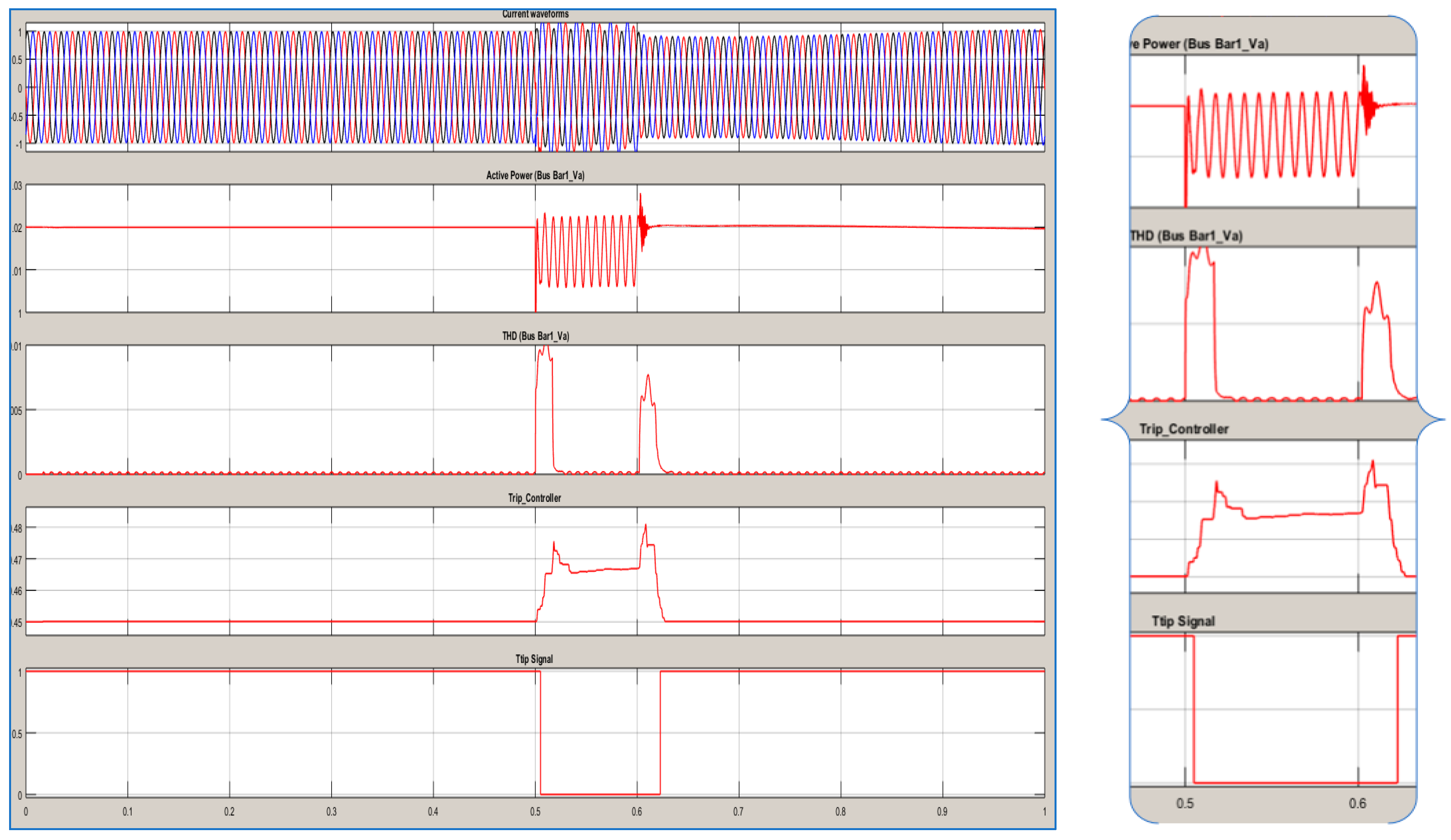
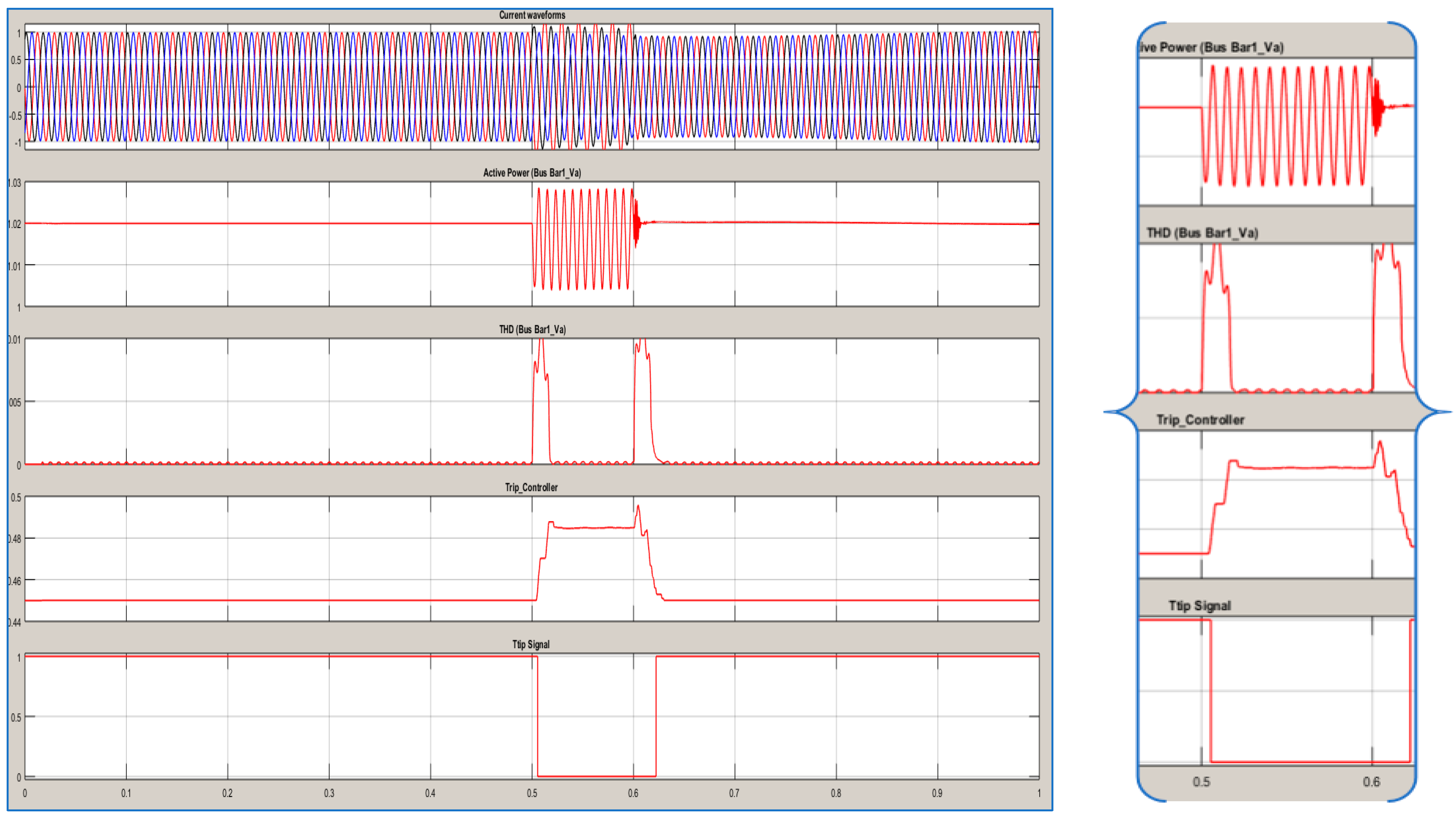
3.2. THD Detection Method
When a fault occurs in the microgrid, it causes distortions in the current. It can be expressed as the total harmonic distortion (
THD) of the current at the monitoring time t as in Equation (22):
where
is the
r.m.s. the value of the harmonic components
h, and
is the
r.m.s. value of the fundamental component [
21].
THD variation (Δ
THDt) is a measure of how much the monitored
THD at time
t deviates from the steady state normal loading conditions, where
reference value for the steady state. The average of
over one cycle is defined as follows:
where
is the
reference value for the steady state and normal loading conditions, and
N is the sampling number of one cycle [
22].
3.3. Proposed Neuro Fuzzy Inference System for Protection
ANN has strong capabilities of learning at the numerical level. Fuzzy logic has good interpretability and also integrates expert knowledge. The hybridization of both produces learning abilities, good comprehension, and the incorporation of prior knowledge. ANN can be used to learn the values of membership of the fuzzy systems, to build IF-THEN rules, or to build the logic of the decision. The true scheme of the two paradigms is a hybrid fuzzy neural system, which captures the merits of both systems. A neuro-fuzzy system has a neural network architecture built from fuzzy reasoning. Structured knowledge is organized as fuzzy rules, while the capacities of adaptation and learning of neural networks are maintained.
Expert knowledge can increase learning speed and the precision of the estimate. Fuzzy logic is one of the most popular applications in the field of control technology that may be used to control various parameters in real time. This logic, combined with the neural network model, has given very good results. The combined technique of the learning capacity of the NN and the representation of knowledge of FL has created a new hybrid technique called neuro-fuzzy networks [
22].
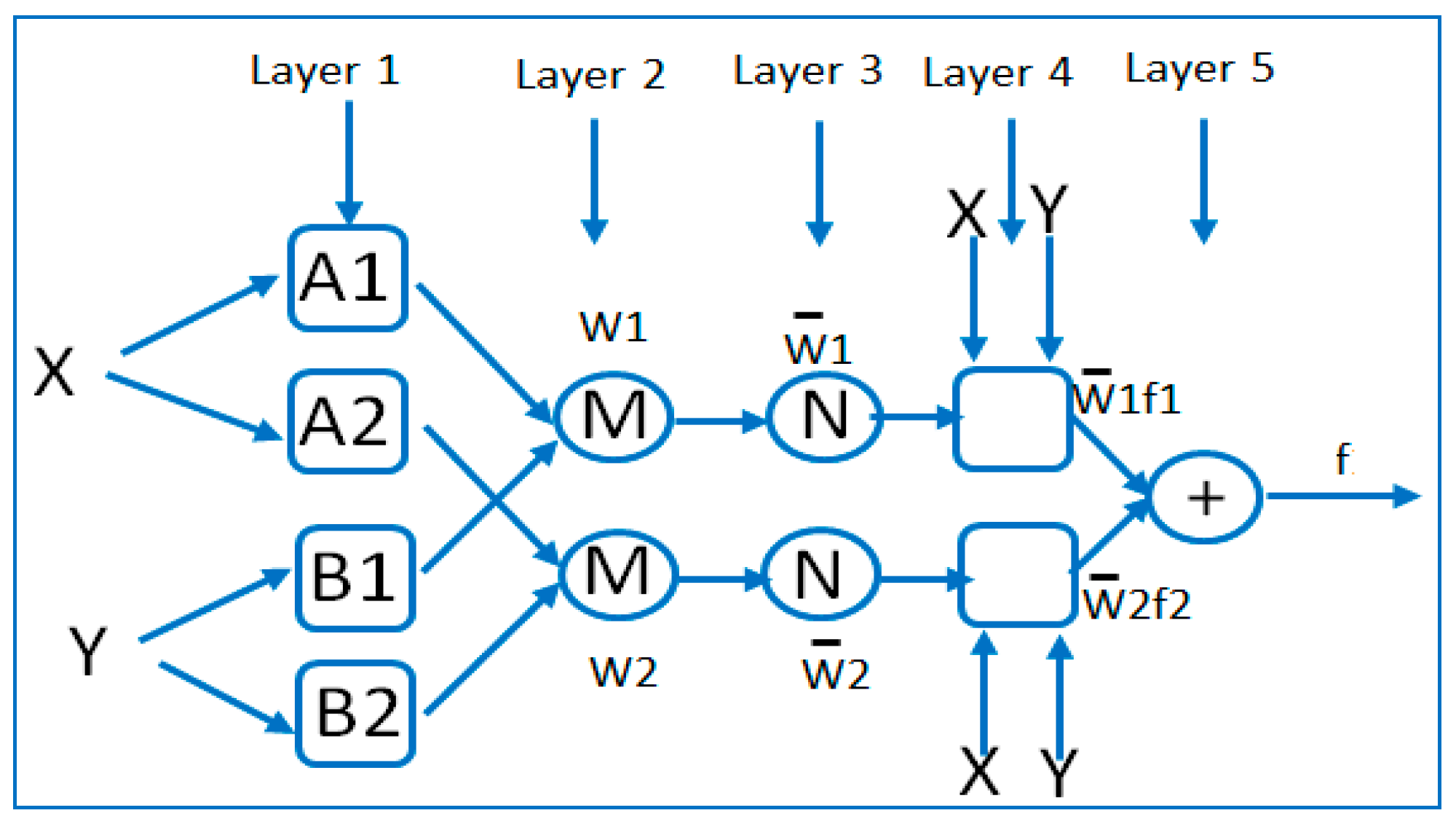
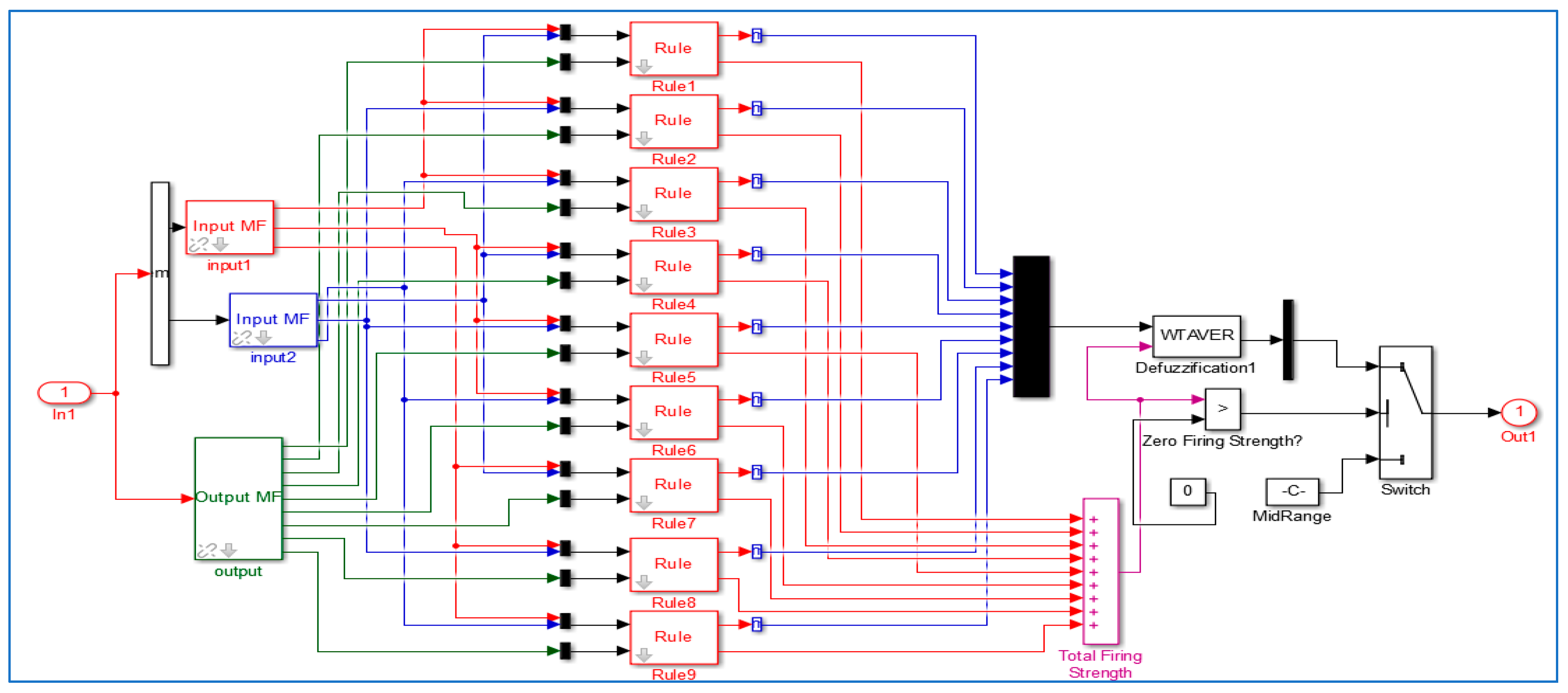
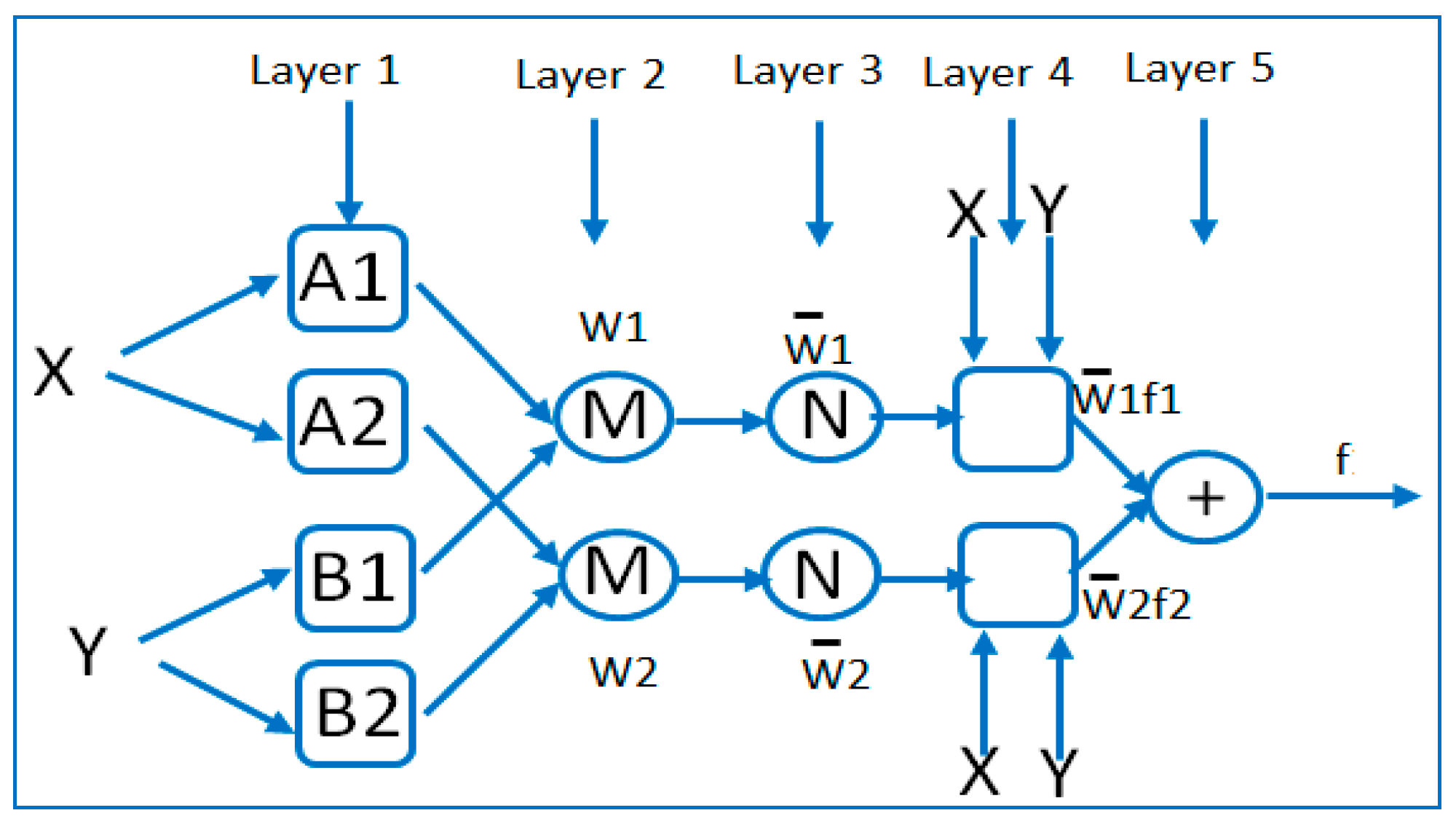
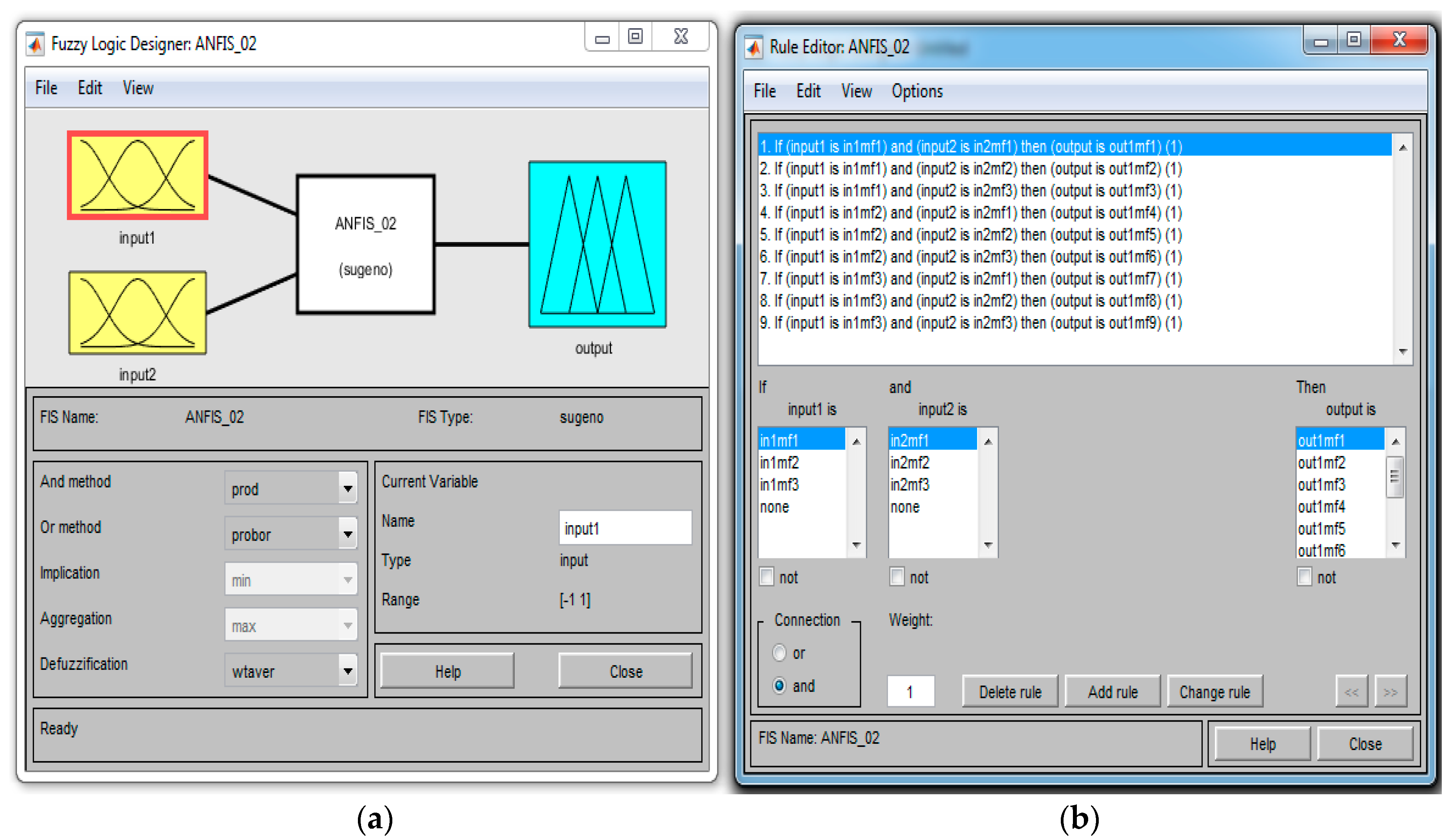
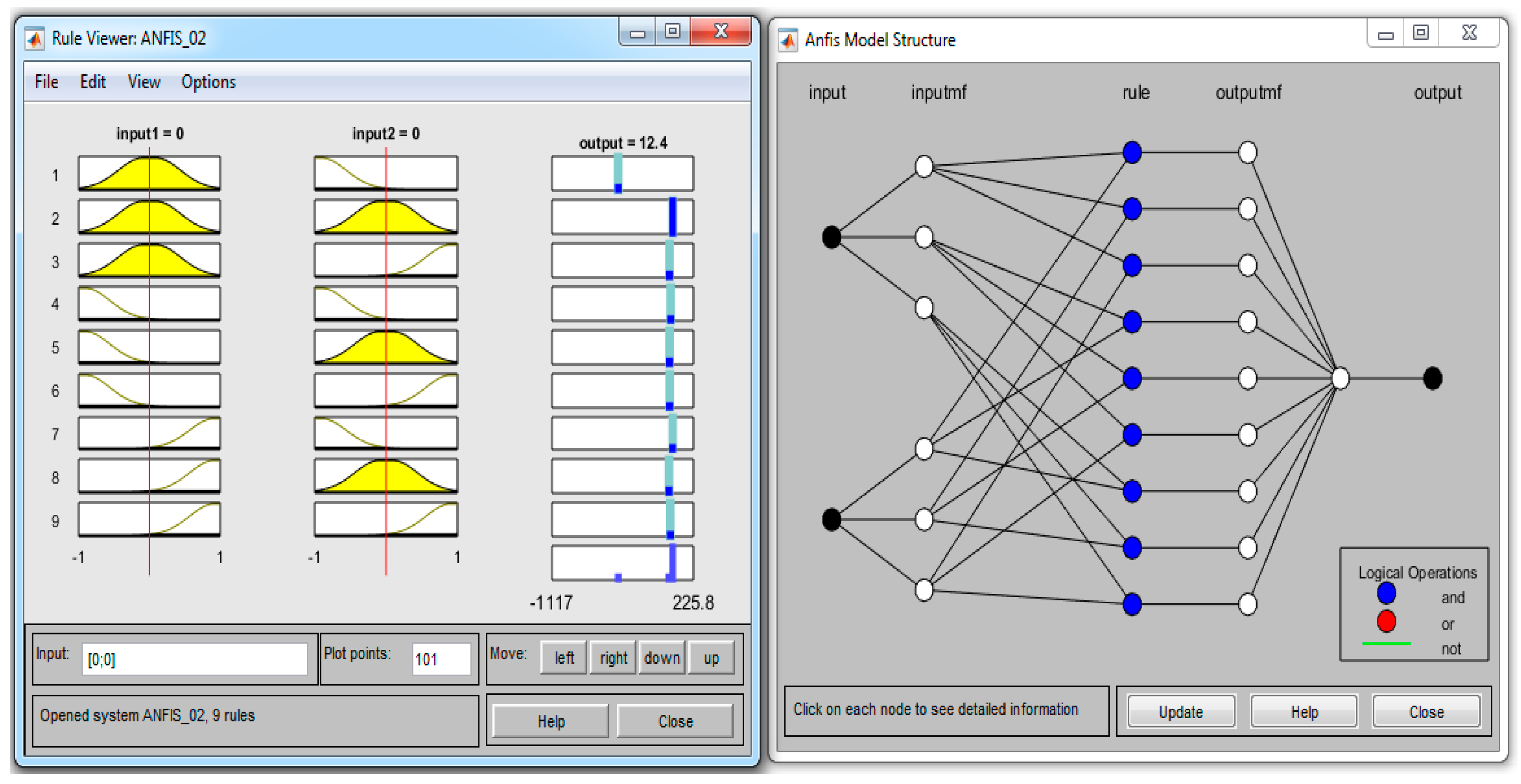
This technique was developed in the early 1990s. Adaptive network-based fuzzy inference system is a combination of neural networks with fuzzy logic; this combination has the explicit knowledge representation of a fuzzy inference system (FIS) learning the ANNs. FIS provides a useful framework for computing based on the concepts of fuzzy theory, fuzzy set if, then rules and fuzzy logic. ANFIS is an FIS applied in the context of an adaptive fuzzy neural network. The main goal is to optimize the parameters of an equivalent FIS using a learning algorithm with input datasets for output. Optimization of the parameters is performed in such a way as to minimize measurement errors. A typical architecture of an ANFIS for two inputs is shown in
Figure 1, in which the circle indicates a fixed node while the square indicates an adaptive node [
23,
24].
For two inputs (
x and
y) and one output (
f), in the first layer, the input values of the universe are converted into their respective membership values by the corresponding membership functions. Here, the membership function can be any appropriately membership function, such as a generalized bell function as in Equation (27), where
is a set of parameters called a parameter premise [
23].
Rule 1: IF
x is
A1 and
y is
B1, then
Rule 2: IF
x is
A2 and
y is
B2, then
(A1, A2, B1, B2) are called the premise parameters.
(pi, qi, ri) are called the consequent parameters, i = 1, 2.
The consequent parameters (p, q, and r) of the nth rule contribute through a first-order polynomial within the fuzzy region specified by the fuzzy rule; pn, qn, and rn are the design parameters that are determined during the learning process.
Layer 1: Generate the membership grades: adaptive nodes, the outputs of this layer, are the fuzzy membership grade of the inputs.
where
O1,i is the membership function. In this layer the parameters of each
MF are adjusted.
and
are any appropriately parameterized membership functions.
Layer 2: Generate the firing strengths. The nodes are fixed nodes with function of multiplication.
Layer 3: Normalize the firing strengths. The nodes are also fixed nodes with function of normalization.
Layer 4: Calculate rule outputs based on the consequent parameters:
Each node in this layer is an adaptive node and in this layer parameters of output are adjusted.
Layer 5: Add up all the inputs from layer 4: a fixed node with the function of the summation:
when input–output training patterns exist, the weight vector (
w), which consists of the consequent parameters, can be solved by using a regression technique.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}