5.1. Results of Parameter Extraction
Experimental results of the 11 constant discharging currents are shown in
Figure 9. The discharging time is summarized in
Table 2. The discharging time of the 1 C test is 54 min, while the 0.02 C test spends almost 46 h. The diffusion model parameters are estimated by the experimental results of 0.1 C to 1.0 C tests. The discharging time of the 0.1 C to 1.0 C tests is
, and the discharging currents are
. By taking the measurement results into Equation (
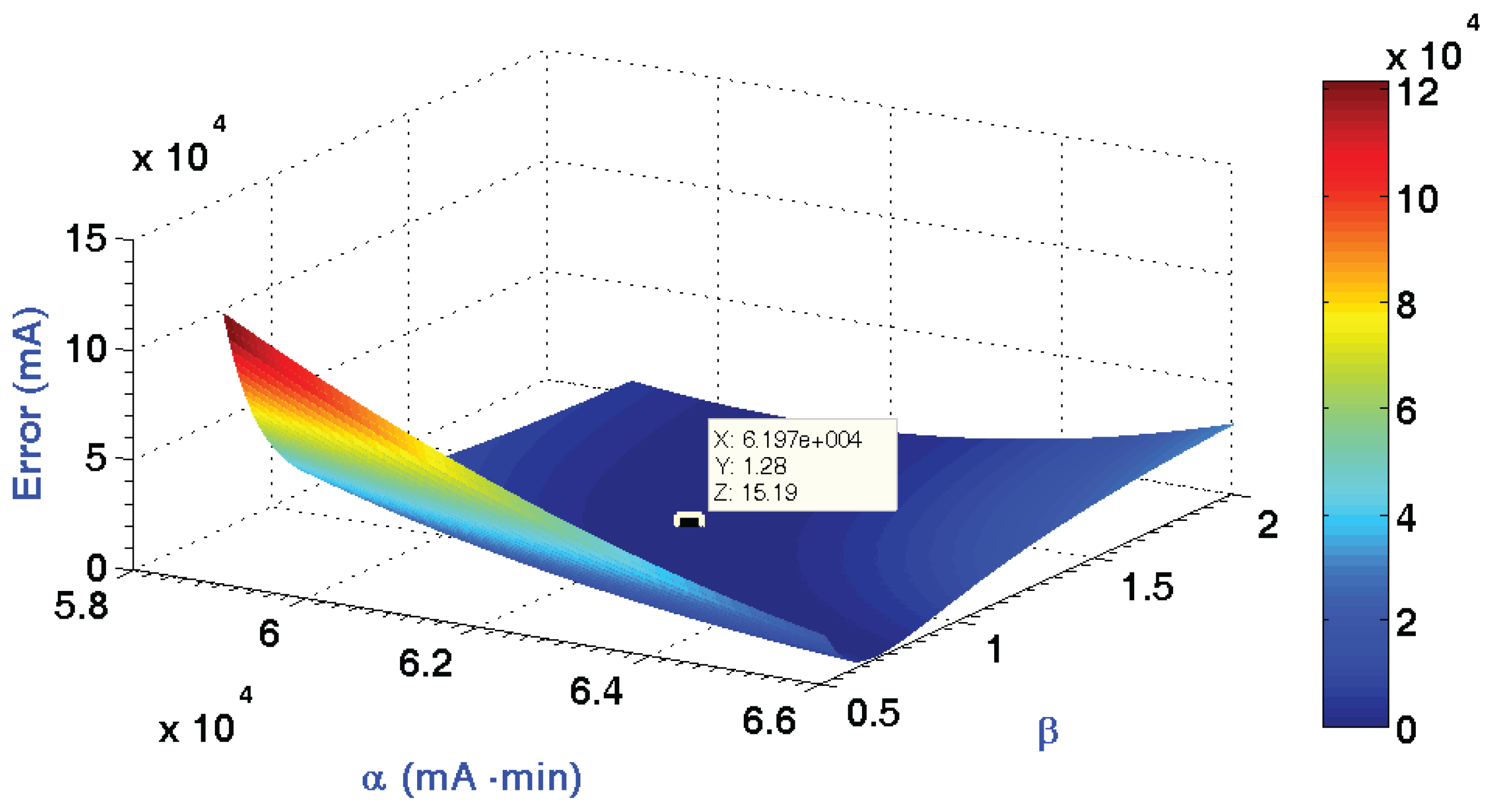
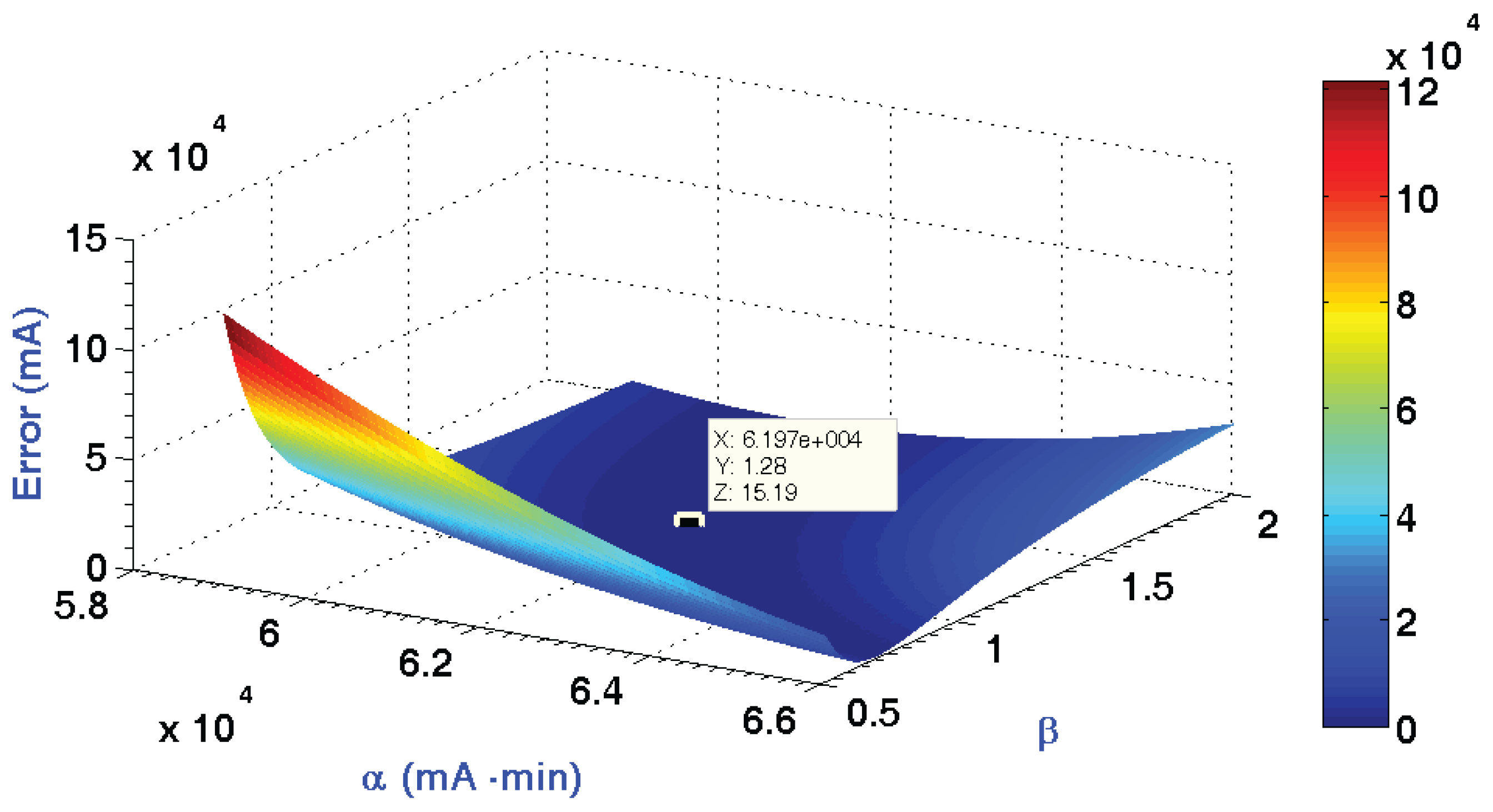
12), an error surface in
Figure 10 is plotted in the range of
α = 58,000 mA·min to 66,000 mA·min and
β = 0.5 to 2. An optimization point is found at the location of
α = 61,970 mA·min (or 1032.83 mAh) and
β = 1.28.
Figure 9.
Battery voltage curves of the constant discharging current tests.
Figure 9.
Battery voltage curves of the constant discharging current tests.
Table 2.
Measured runtime of the constant discharging current tests.
Table 2.
Measured runtime of the constant discharging current tests.
| C-rate (C) | 1.0 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 |
| Discharge time (min) | 54.37 | 60.67 | 68.73 | 75.75 | 91.95 | 110.683 |
| C-rate (C) | 0.4 | 0.3 | 0.2 | 0.1 | 0.02 | |
| Discharge time (min) | 139.03 | 185.15 | 278.38 | 558.08 | 2740.93 | |
Figure 10.
Error surface to find the optimization set of the α and β parameters.
Figure 10.
Error surface to find the optimization set of the α and β parameters.
Taking the measured
α and
β into Equations (
8) and (
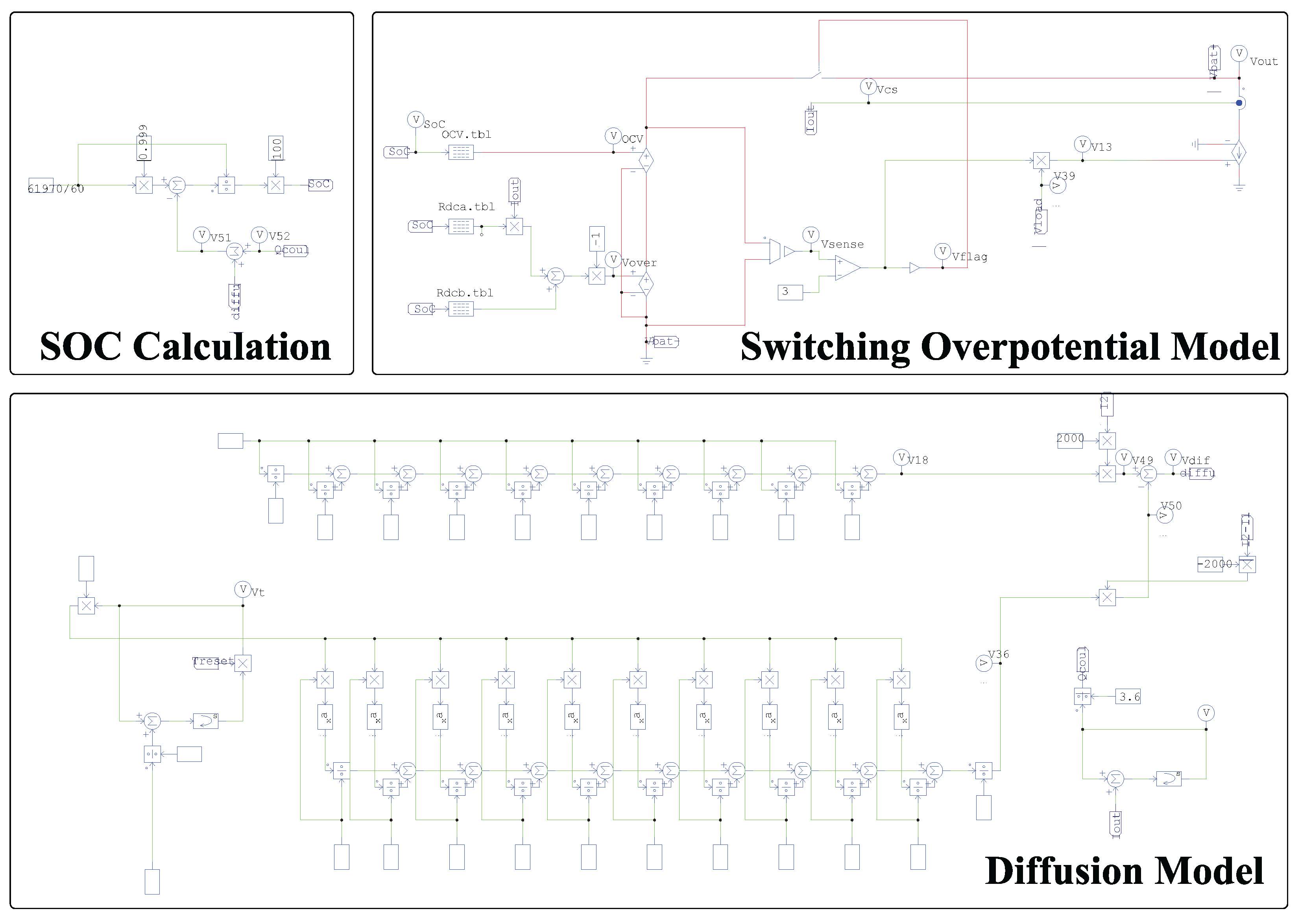
9) obtains SOCs of the 11 discharging tests for extracting parameters of the switching overpotential model, e.g., the EMF-SOC curve,
-SOC curve and
-
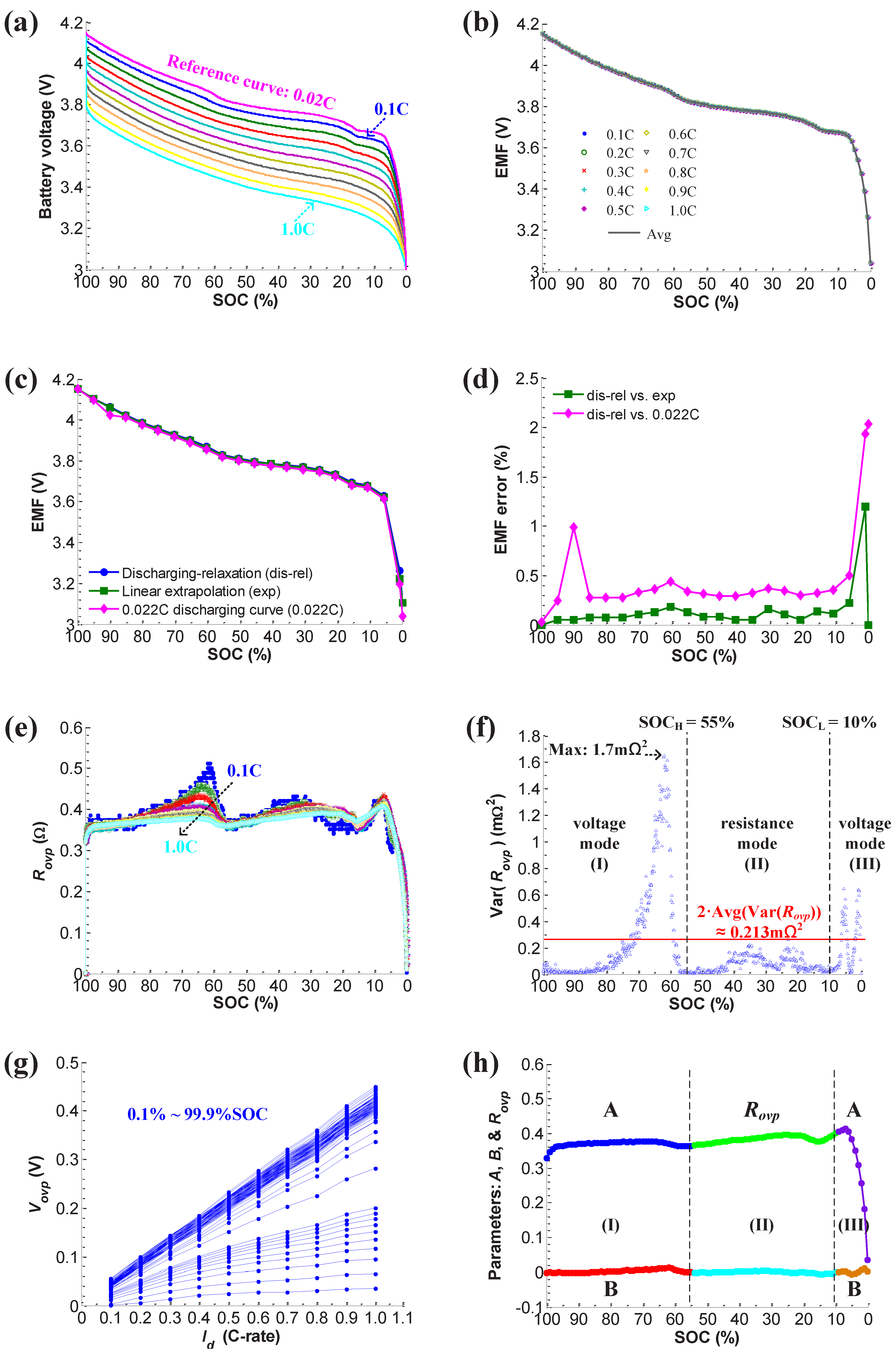
curves. The battery voltage-SOC curves are shown in
Figure 11a. The result of the 0.02 C current rate is a reference voltage curve for linearly extrapolating EMF-SOC curves.
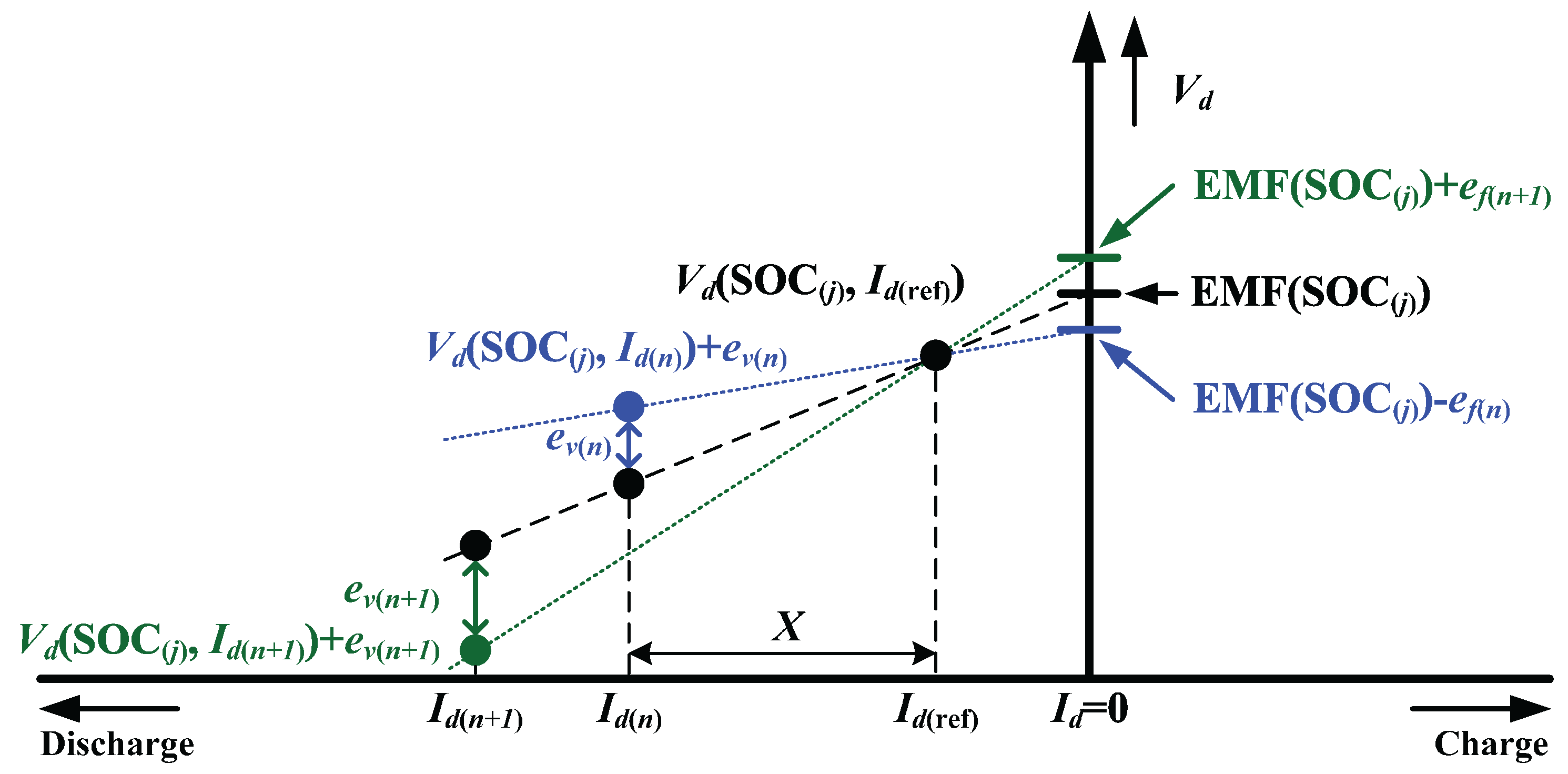
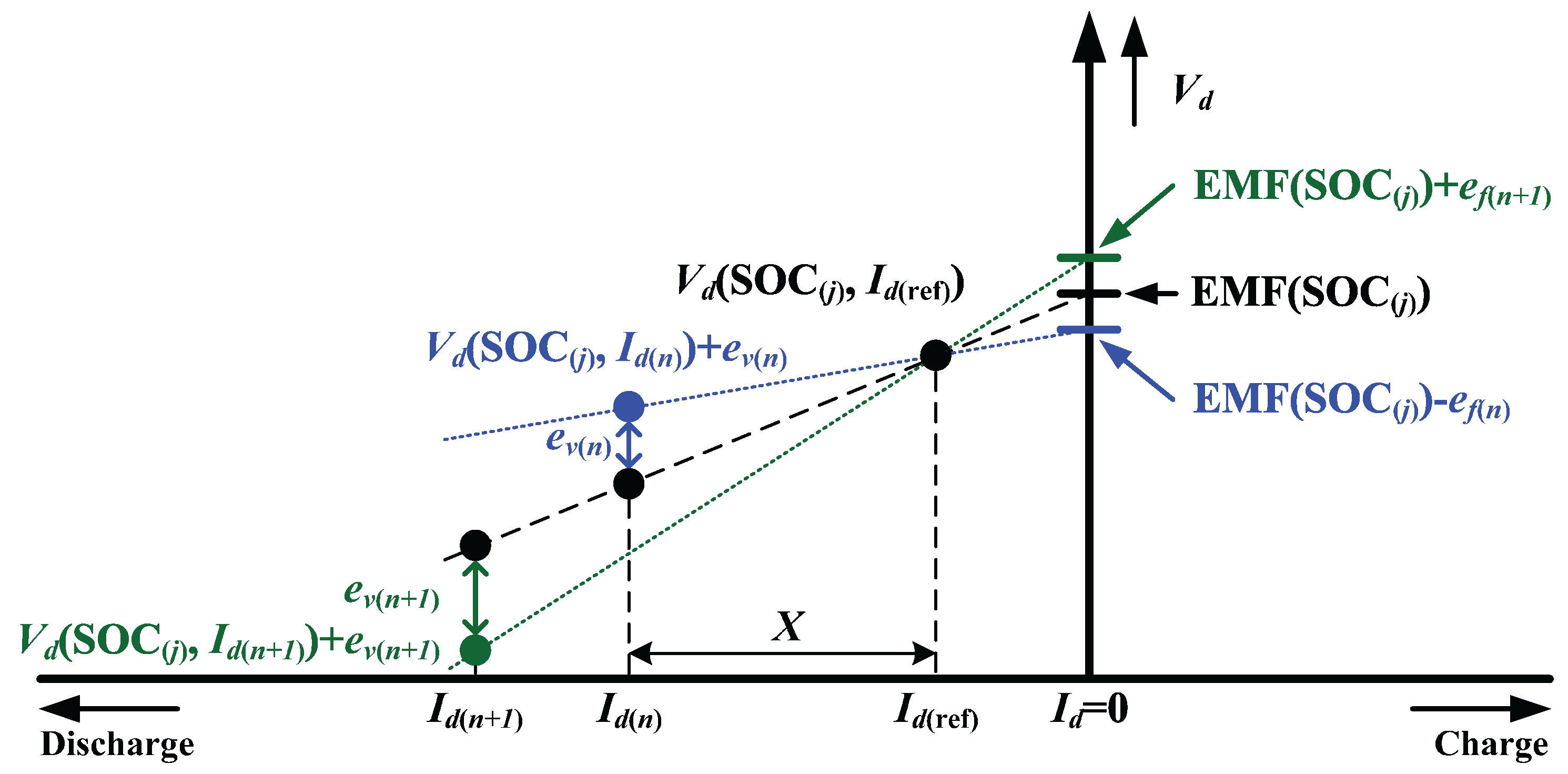
Figure 11b presents the results of EMF-SOC curves extracted from 0.1 C to 1.0 C current rates. Only the EMF-SOC curve of the 0.1 C test has a high error ratio in that the
X is five in this case. Other EMF-SOC curves all present good consistency because the error ratios are less than 1%. To improve the accuracy of EMF extraction, the final EMF-SOC curve is an average result of these extracted curves. The value at each SOC point is computed by Equation (
16).
Figure 11c compares the voltage curves of a discharge-relaxation method, the linear extrapolation method and the 0.02 C discharging results. The discharge-relaxation method uses a 0.1 C discharging rate to measure the EMF-SOC curve. The EMF voltage is measured every 4.5% SOC. The relaxation time is one hour at each test SOC point to ensure that the battery voltage is fully recovered. The EMF errors between the discharge-relaxation curve and the extrapolation curve and between the discharge-relaxation curve and the 0.02 C discharging curve are all shown in
Figure 11d. The EMF error is calculated based on Equation (
26).
where EMF
is the EMF value measured by the discharge-relaxation method and
V can be the voltage of the linear extrapolation method or the 0.02 C discharging result. From
Figure 11d, it is obvious to observe that the error curve of the 0.02 C discharging result is higher than the error curve of the extrapolation method. The average error of the 0.02 C discharging result is about 0.5%, but the average error of the extrapolation method reduces to 0.15%. Thus, the extrapolation method is necessary for obtaining an accurate EMF-SOC curve.
Figure 11.
Experimental results of parameter extraction: (a) battery voltage-SOC curves; (b) EMF-SOC curves; (c) EMF comparisons; (d) EMF errors; (e) -SOC curves; (f) variance of ; (g) - curves; (h) parameters: A, B and .
Figure 11.
Experimental results of parameter extraction: (a) battery voltage-SOC curves; (b) EMF-SOC curves; (c) EMF comparisons; (d) EMF errors; (e) -SOC curves; (f) variance of ; (g) - curves; (h) parameters: A, B and .
With battery voltage-SOC and EMF-SOC curves in hand,
-SOC curves are then extracted from Equation (
21). The results are shown in
Figure 11e. The overpotential resistances in 10% to 90% SOC vary in 0.35 Ω to 0.52 Ω, but have large variations near 60% SOC. The variance of
, or Var(
), is presented in
Figure 11f. The maximum variance is 1.7 m
and happened in the 0.1 C test result due to the low current rate. These variations are also observed in the measured voltage curves and are probably caused by the chemical reactions, such as phase transformations in lithium electrode materials [
33]. The overpotential resistances have sharp changes above 90% SOC and below 10% SOC. Consequently, most of the battery models have low accuracy when they operate in the two SOC regions.
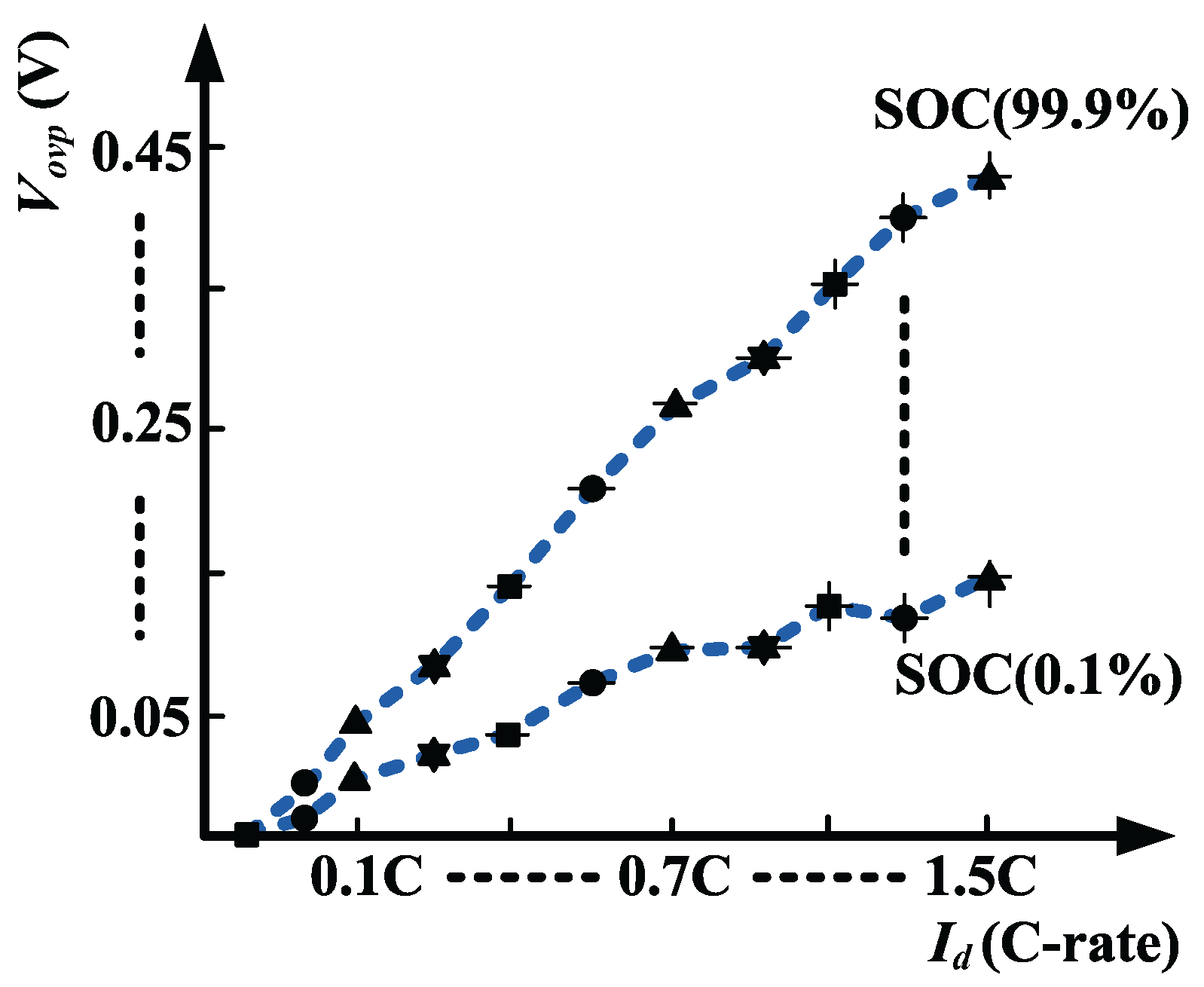
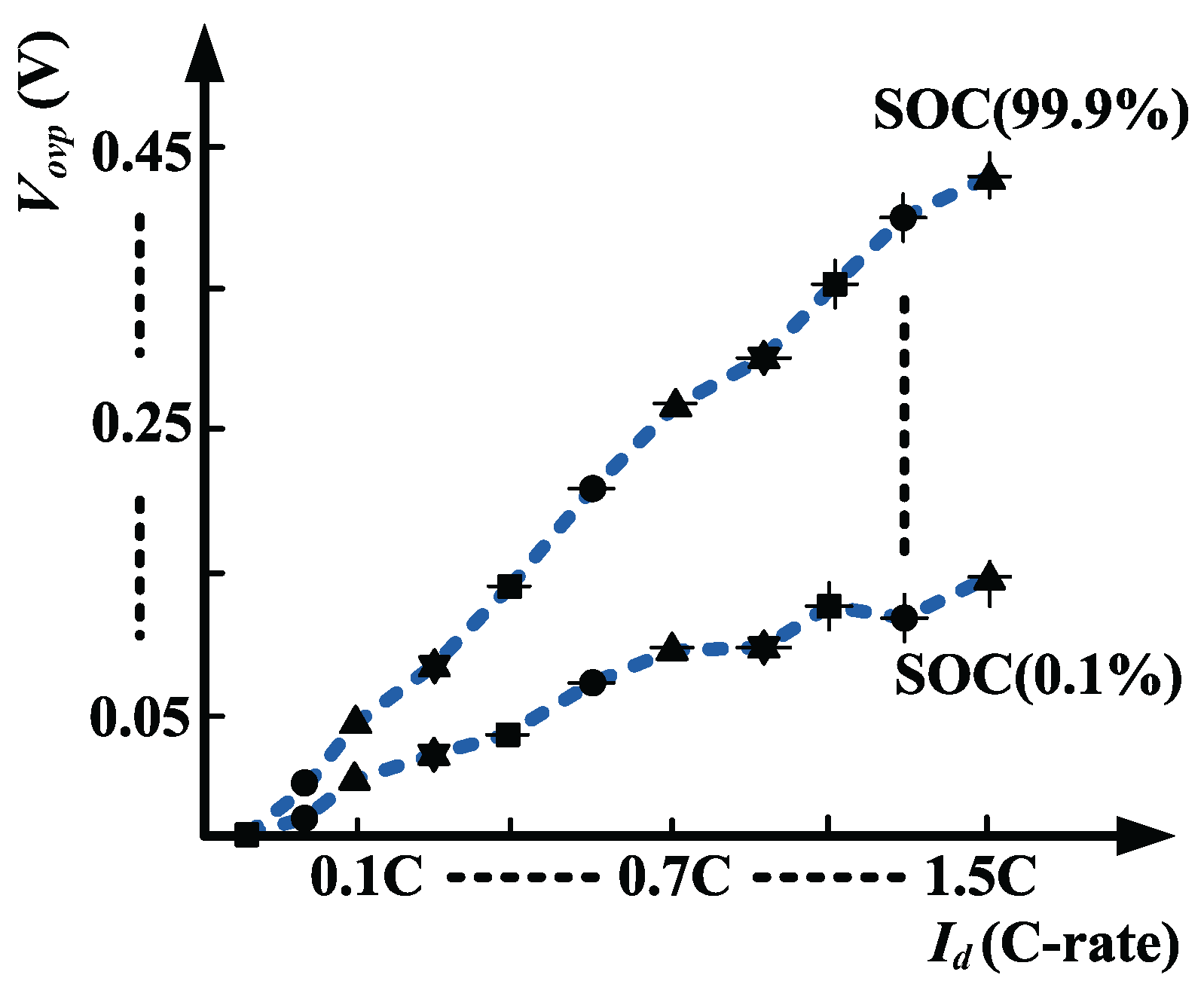
Figure 11g analyzes the overpotential voltages in the SOC range from 0.1% to 99.9%. The linear regression analysis outputs the curve-fitting results of
A,
B and
parameters in
Figure 11h. According to the average variance of
, the SOC is divided into three regions. The first SOC region, or Region I, begins from 100% to 55%. This region covers the maximum variance, so the battery simulator runs in the voltage mode. The second SOC region, or Region II, begins from 54.9% to 10.1%. The second region has a stable
. The average variance is less than 0.1 m
, and the average
is 0.38 Ω. In the second region, the battery simulator operates in the resistance mode. The third SOC region, or Region III, is close to empty capacity. The SOC is in the range from 10% to 0.1%. The
variance increases again, so the voltage mode is a better choice. In the third region, parameter
A has a sharp decrement, so the overpotential voltage would still have small prediction errors.
5.2. Results of Dynamic Load Prediction
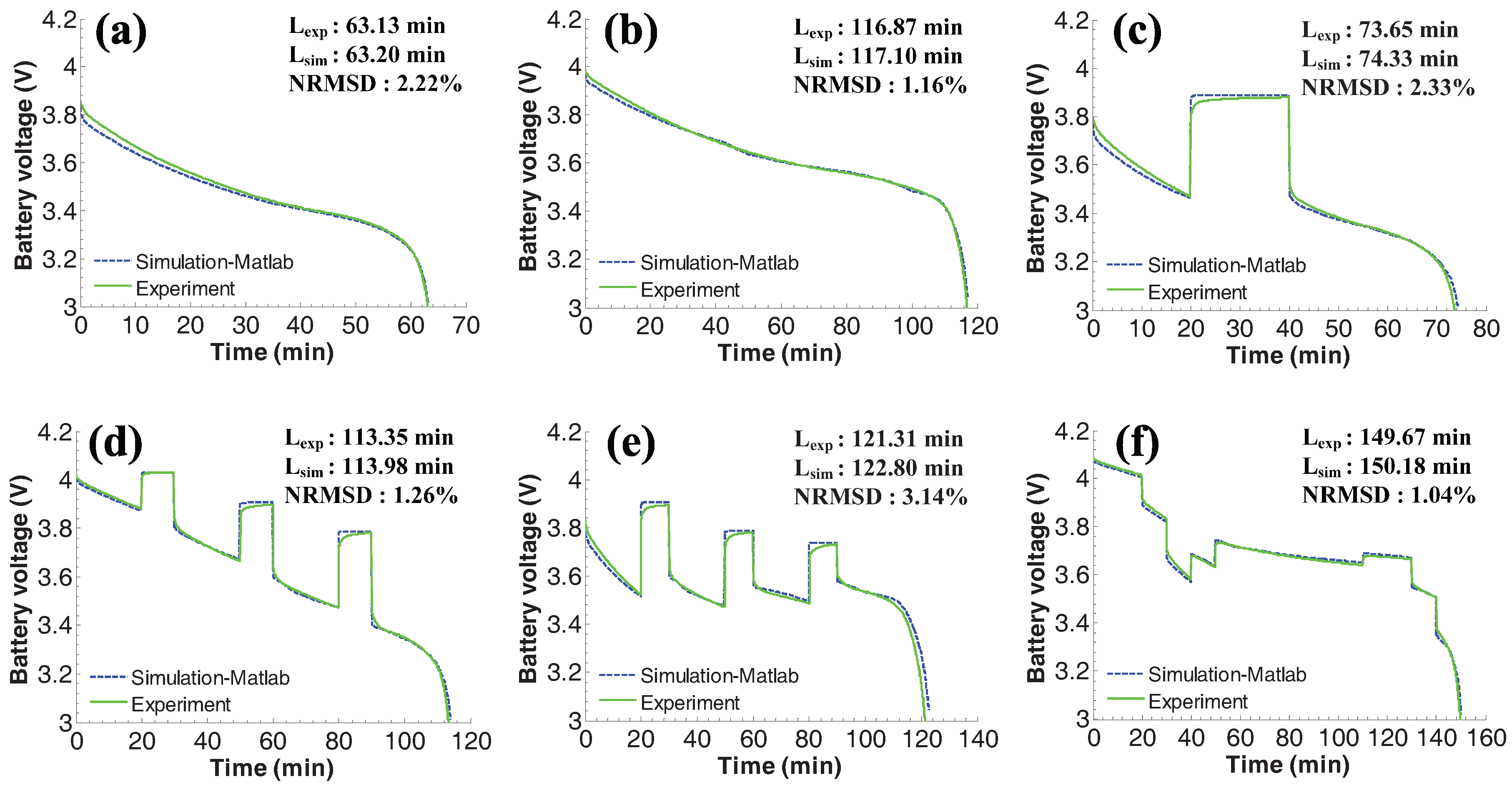
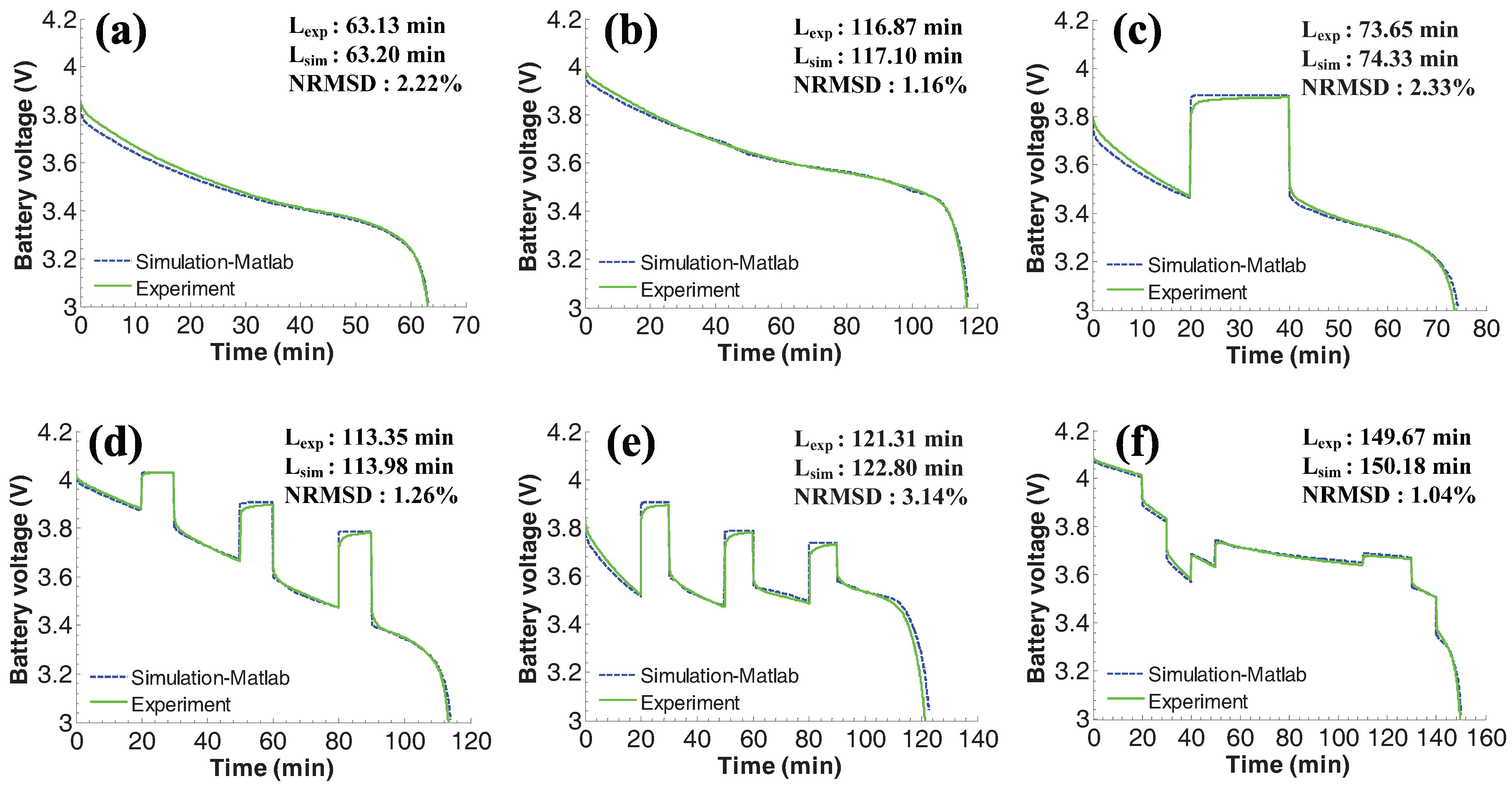
Figure 12 makes comparisons between experimental and MATLAB simulation results. For the constant current loads, the proposed simulator shows good matches in
Figure 12a,b. In both cases, the rate capacity effect is reflected at the beginning of the simulations, so the terminal voltages in experiments and in simulations match well when the test cell is close to empty. The experimental runtimes of the heavy load and the light load tests are 63.13 and 116.87 min, respectively. The simulated runtime of both cases has less than 0.2% prediction errors. The normalized root mean square deviation (NRMSD), which is defined as Equation (
27), recognizes the differences between simulated curves and experimental curves.
where
K is the total measured points,
is the simulated voltage value at time
t and
is the experimental voltage value. The NRMSDs of the two cases are 2.2% and 1.16%. The small errors confirm that the proposed simulator is able to predict dynamic discharging behavior.
For the interrupted load, the simulation result in
Figure 12c also shows a good agreement with the experimental result. The capacity recovery effect occurs during the rest period from 20 min to 40 min. After the rest period, the rate capacity effect takes place again, so the simulator successfully predicts the final runtime with a 0.92% error and dynamic behavior with 2.33% NRMSD.
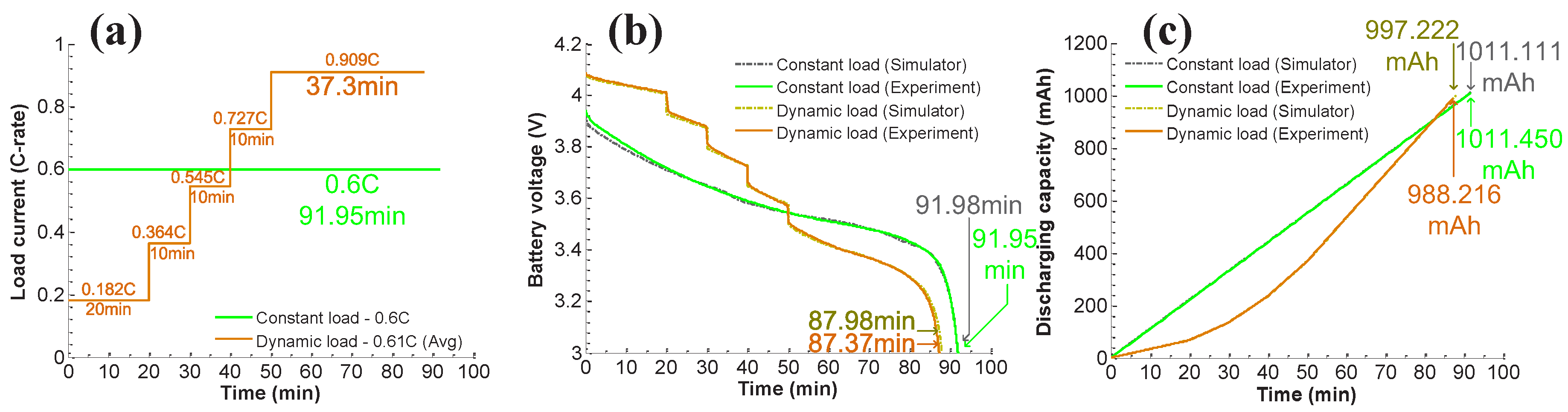
For the increasing and decreasing loads, the rate capacity effect and recovery effect happen alternatively. The simulation result of the increasing load in
Figure 12d predicts the runtime with a 0.54% error, while the prediction error of the decreasing load in
Figure 12e slightly increases. In the overpotential voltage mode, the prediction error only grows to 1.2%. The error is mainly generated near the fully-discharged condition. A possible reason for this error would be that the low current in the finalstep lasts a long time in the low SOC region. As a result, prediction error is accumulated and increases the voltage differences between the simulation and experimental values. The NRMSD of the increasing load is 1.36%, so the proposed simulator has a good behavior prediction on the increasing load. By comparison, the NRMSD of the decreasing load is 3.14%.
Figure 12.
Model validation by MATLAB simulations: (a) heavy load (); (b) light load (); (c) interrupted load (); (d) increasing load (); (e) decreasing load (); (f) varying load ().
Figure 12.
Model validation by MATLAB simulations: (a) heavy load (); (b) light load (); (c) interrupted load (); (d) increasing load (); (e) decreasing load (); (f) varying load ().
For the varying load, there is no rest time in this profile. Besides, the current changes without any rule. The simulation result in
Figure 12f validates again that the proposed simulator can accurately predict the dynamic discharging behavior and further evaluate the runtime under various discharging profiles.
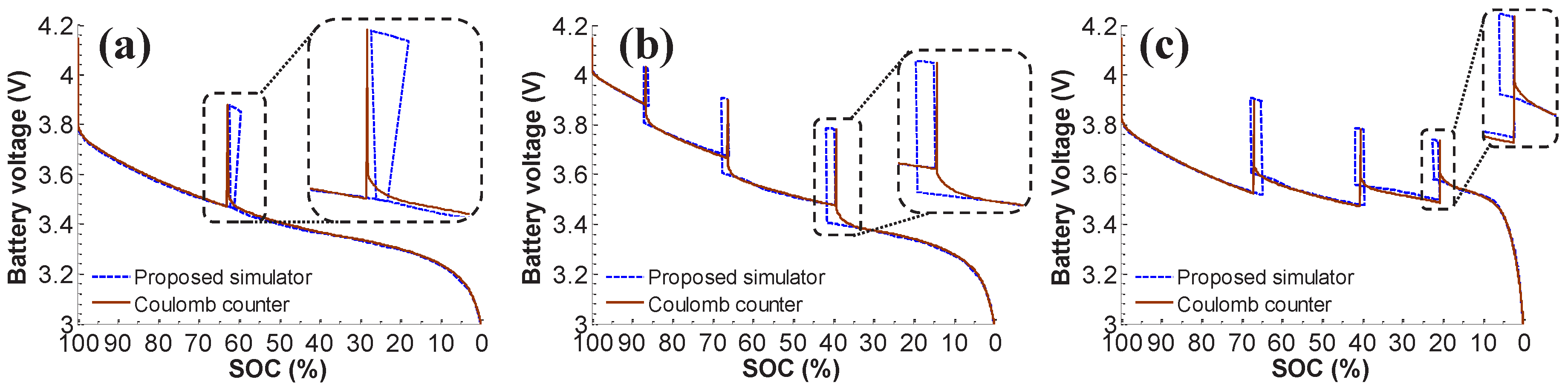
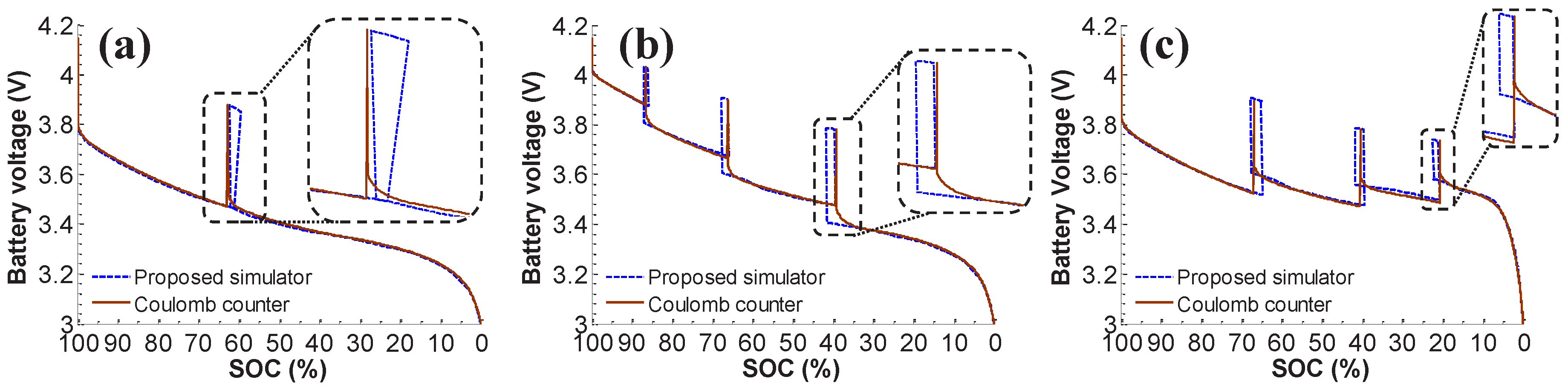
Figure 13 checks the battery voltage-SOC curves of the
to
profiles. In these plots, the SOCs estimated by the proposed simulator and the Coulomb counter are compared. The Coulomb counter estimates SOCs using the nominal capacity as the maximum available capacity. During the rest time, the recovering capacities are observed by the proposed battery simulator. However, the SOCs reported by the Coulomb counter do not have any change in this period of time, so this causes some runtime prediction errors.
Figure 13.
Capacity recovery effects in the to profiles.
Figure 13.
Capacity recovery effects in the to profiles.
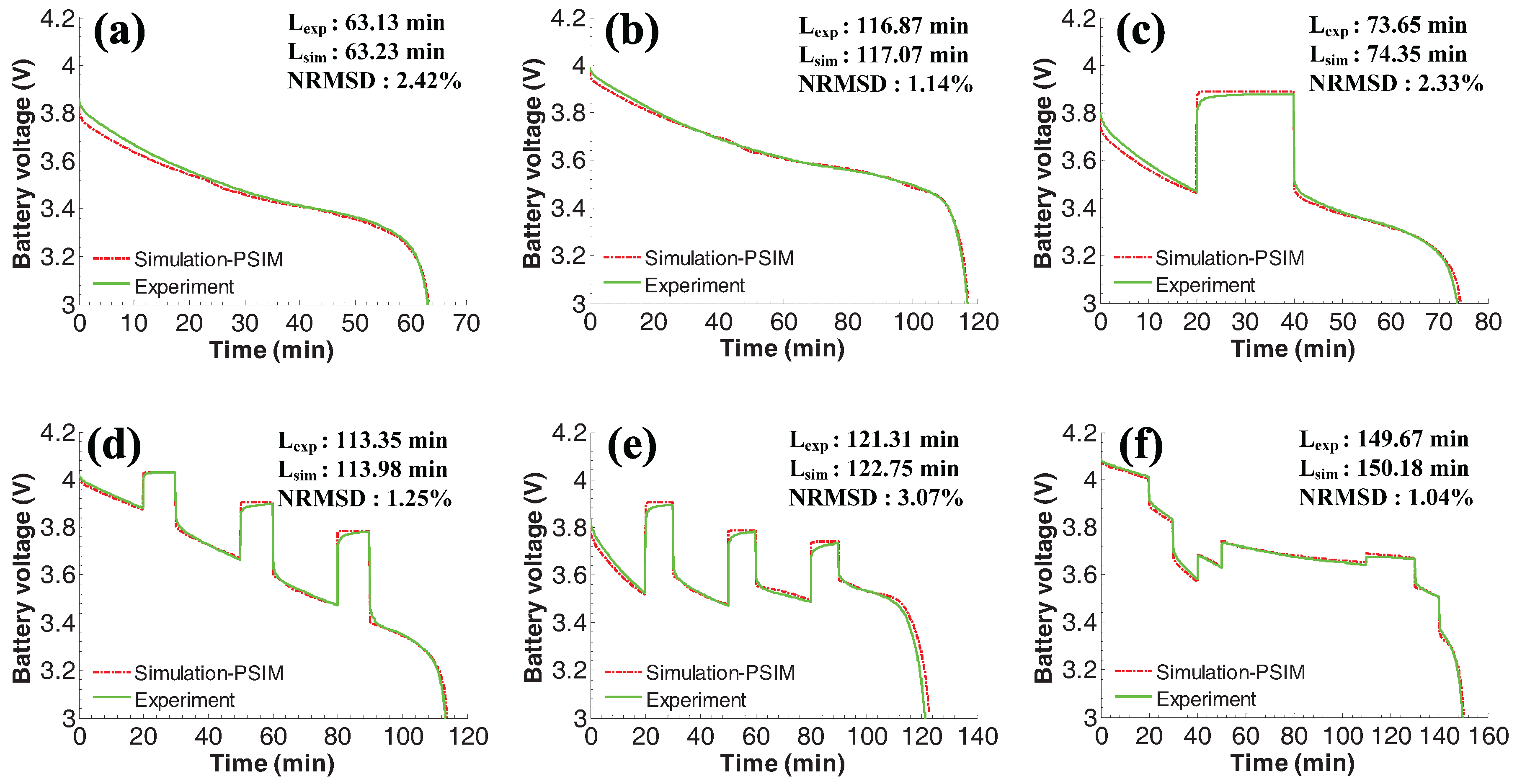
Figure 14 presents the PSIM simulations for the same profiles. The simulation comparisons are made in
Table 3. The runtime and behavior errors show that there are very small differences between PSIM simulation results and MATLAB simulation results. This means that the proposed battery simulator is successfully implemented in the PSIM simulation environment for dynamic discharging behavior and runtime predictions. For both simulation tools, the simulation time of the
to
profiles is smaller than 5 s.
Figure 14.
Model validation by PSIM simulations: (a) heavy load (); (b) light load (); (c) interrupted load (); (d) increasing load (); (e) decreasing load (); (f) varying load ().
Figure 14.
Model validation by PSIM simulations: (a) heavy load (); (b) light load (); (c) interrupted load (); (d) increasing load (); (e) decreasing load (); (f) varying load ().
Table 3.
Simulation result comparisons. NRMSD, normalized root mean square deviation.
Table 3.
Simulation result comparisons. NRMSD, normalized root mean square deviation.
| | | | | | | | |
| MATLAB | runtime error | 0.11% | 0.20% | 0.92% | 0.56% | 1.19% | 0.34% |
| behavior error (NRMSD) | 2.22% | 1.16% | 2.33% | 1.26% | 3.14% | 1.04% |
| PSIM | runtime error | 0.15% | 0.17% | 0.95% | 0.56% | 1.15% | 0.34% |
| behavior error (NRMSD) | 2.42% | 1.14% | 2.33% | 1.25% | 3.07% | 1.04% |
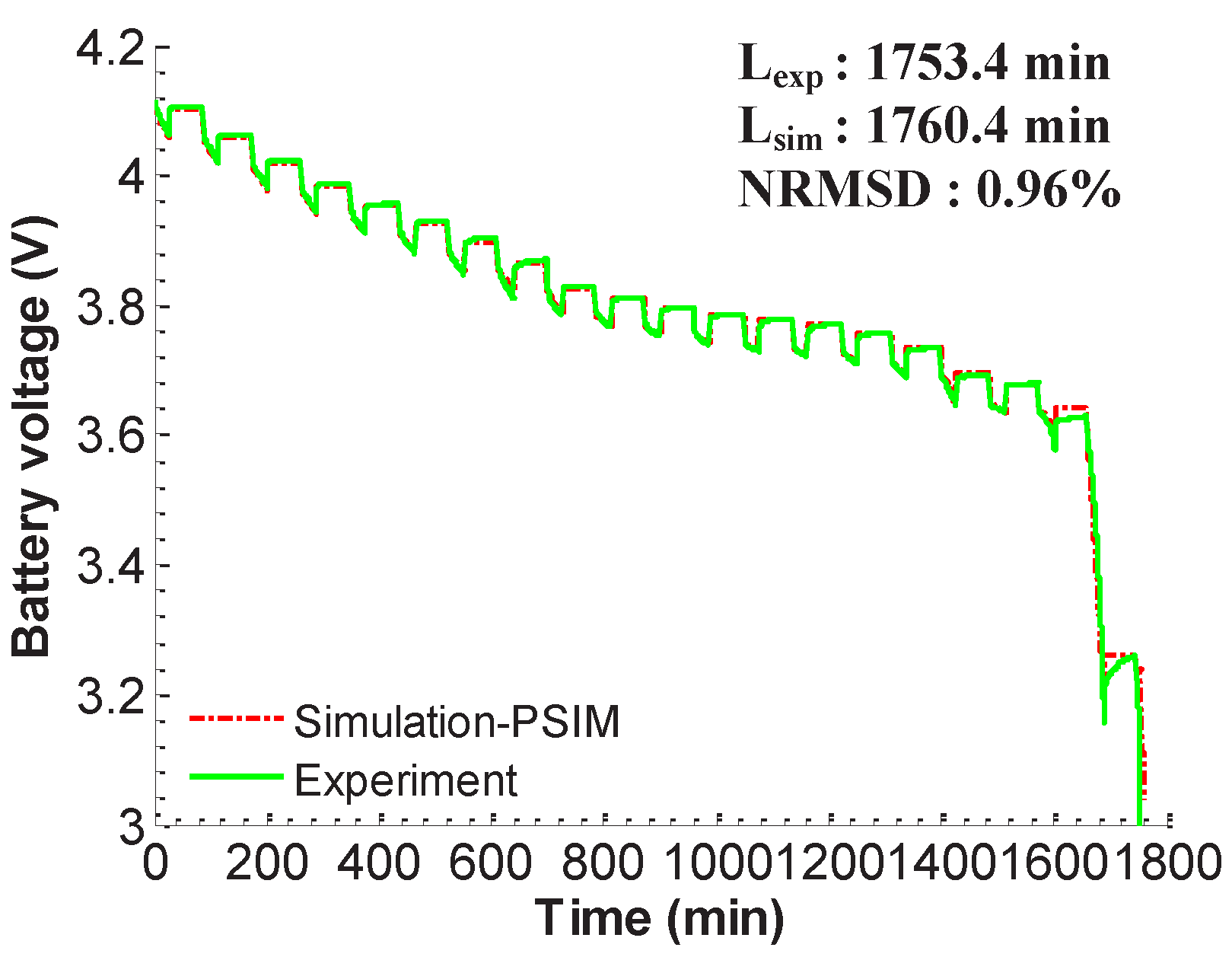
A more aggressive discharge profile to prove the predictive capability of the battery simulator is the discharge-relaxation experiment that has been applied to find the EMF-SOC curve in
Figure 11c. The experiment and PSIM simulation results are shown in
Figure 15. The experiment time is 1753.4 min, or 29.2 h. The runtime predicted by the proposed simulator is 1760.4 min, or 29.3 h. The runtime error is 0.4%. The behavior prediction error shows that the NRMSD is 0.96%. The PSIM simulation time of the 0.1C discharge-relaxation test is 44 s.
Figure 15.
Validation of the 0.1 C discharge-relaxation test.
Figure 15.
Validation of the 0.1 C discharge-relaxation test.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}