2.1. Multiple Scattering
The multiple scattering method was first presented by Kagemoto and Yue [
20], who combined the direct matrix method [
21,
22] with an iterative multiple scattering method [
23] to an exact multiple scattering theory (within the assumption of linearized potential flow). For floating truncated cylinders, the infinite matrices in the solution must be truncated, and the method is semi-exact. The method was later combined with the single-body diffraction solution of [
24] in [
25] and extended to independent radiation in [
26]. Here, the multiple scattering theory is reviewed, and the notation used in the paper is presented. In
Section 2.3, the concept of a maximal interaction distance cut-off is presented and combined with the multiple scattering method, which enables faster solutions of the scattering problem in larger arrays.
Consider a wave energy farm with
N point-absorbing WECs, labeled by indices
, in a fluid domain of uniform depth
h. Define global coordinates
with
at the undisturbed free water surface and
at the seabed. Each WEC consists of a direct-driven linear generator at the seabed connected by a stiff wire to a float at the sea surface; see
Figure 1.
A priori, the floats may be of different shapes and dimensions and move in six degrees of freedom, but for simplicity, we here restricted to cylindrical floats of equal radius
R and draft
d, moving in heave with independent velocities
. For clarity, the nomenclature used in the paper is summarized in
Table 1.
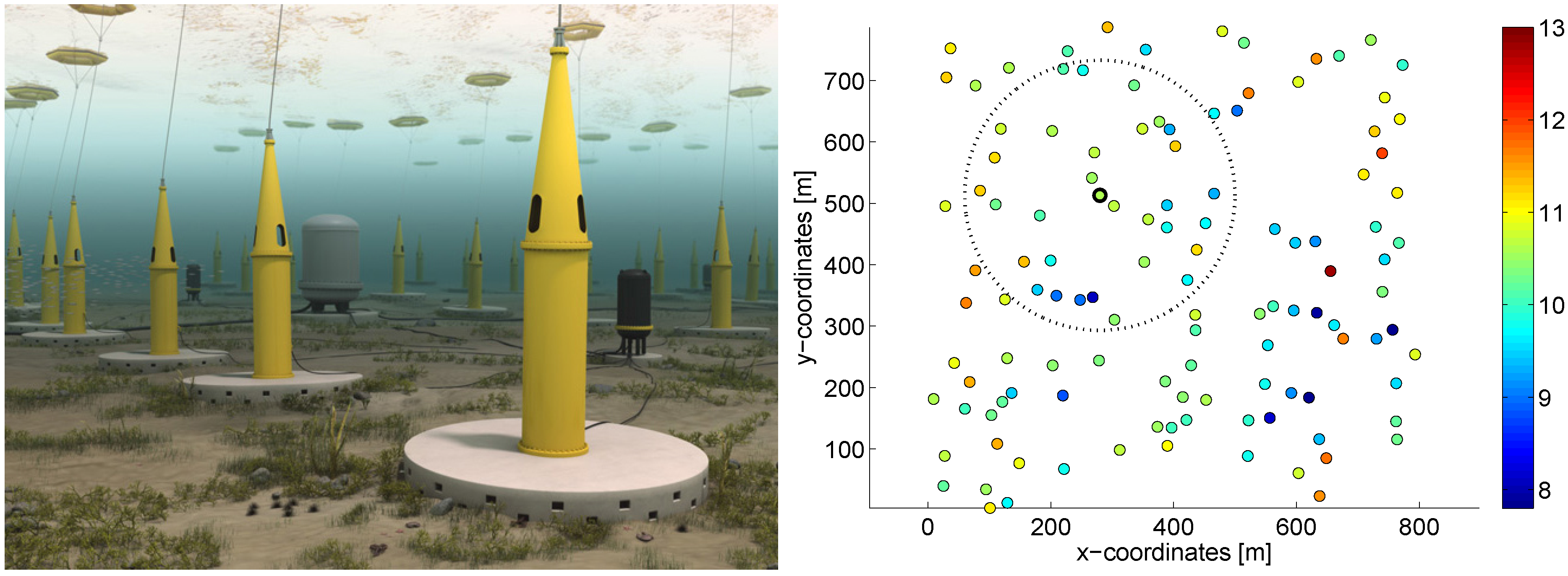
Figure 1.
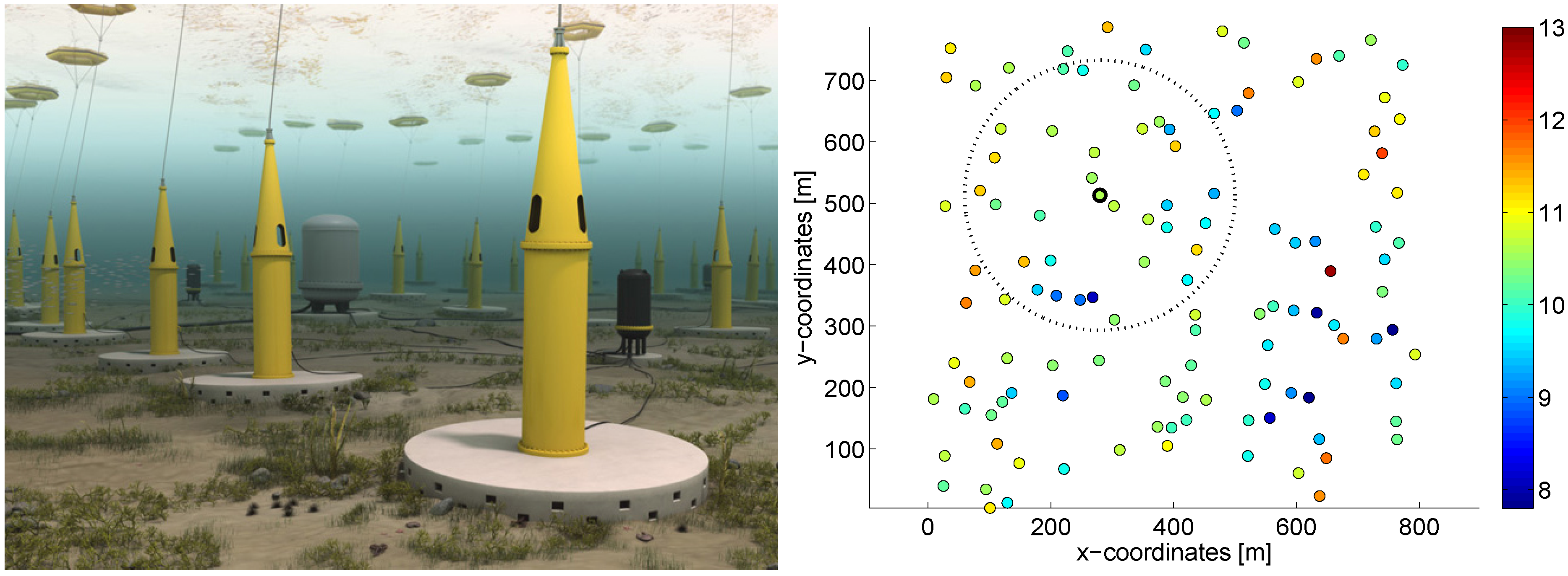
Illustration of a wave energy farm and a simulation of a farm consisting of 120 WECs in a random configuration. The time-averaged power absorption of the individual WECs (kW) is shown with the color bar. The dotted circle illustrates the concept of using interaction distance cut-off in the simulations; in any given array, the hydrodynamical interaction may be computed only between WECs within a specified distance, which speeds up the computations and reduces memory usage, but retains a high accuracy.
Figure 1.
Illustration of a wave energy farm and a simulation of a farm consisting of 120 WECs in a random configuration. The time-averaged power absorption of the individual WECs (kW) is shown with the color bar. The dotted circle illustrates the concept of using interaction distance cut-off in the simulations; in any given array, the hydrodynamical interaction may be computed only between WECs within a specified distance, which speeds up the computations and reduces memory usage, but retains a high accuracy.
Table 1.
Nomenclature and parameter values, where a numerical value exists.
Table 1.
Nomenclature and parameter values, where a numerical value exists.
| Parameter and symbol | | Value | Parameter and symbol | | Value |
|---|
| Incident wave amplitude | A | | Velocity of buoys | | |
| Incident wave angle | χ | | Vertical eigenfunctions | | |
| Scattering potential | | | Bessel functions | | |
| Radiation potential | | | Modified Bessel functions | | |
| Coefficients in | | | Wave numbers | | |
| Coefficients in | | | Single-body diffr. matrix | | |
| Coefficients in | | | Separating distance | D | |
| Combined coefficients | | | Interaction dist.cut-off | | |
| Incident wave coefficient | | | Absorbed power | | |
| Angular frequency | ω | | Interference factor | q | |
| Number of WECs | N | 9–120 | Water density | ρ | 1025 kg/m |
| Buoy mass | | 3.0 tons | Water depth | h | 25 m |
| Translator mass | | 10.0 tons | Water depth minus draft | L | 24.55 m |
| Power take-off damping | Γ | 140 kNs/m | Significant wave height | | 0.13–5.77 m |
| Buoy radius | R | 3 m | Energy period | | 2.54–11.3 s |
| Draft | d | 0.45 m | Vertical cut-off | | 20 |
| Gravitational acceleration | g | 9.81 m/s | Angular cut-off | | 3 |
Under the assumption of non-viscous, irrotational and incompressible fluid, the governing equation of the fluid velocity reduces to the Laplace equation
, where
is the fluid velocity potential. By further assuming non-steep waves, the boundary constraints at the free surface can be linearized, and the total fluid velocity potential will be the superposition of incoming, scattered and radiated waves,
. By Fourier transform, the fluid potential can be considered in the frequency domain,
where the frequency dependence in
is implicit.
Define local cylindrical coordinates
with origin at the center of each buoy
and divide the fluid domain into an interior region beneath each buoy,
, and the exterior region outside,
. By the separation of variables, a general solution to the Laplace equation can be found in terms of eigenfunction expansions. A general outgoing wave in the exterior domain that satisfies the Laplace equation and the boundary constraints at the free surface and seabed takes the form:
where
are normalized vertical eigenfunctions defined in Equation (A1) in the
Appendix and
are unknown coefficients. The wave number
is a solution to the dispersion relation
, and the Hankel functions
correspond to propagating modes. The wave numbers
,
are consecutive roots to the dispersion relation
, and the Bessel functions
correspond to evanescent modes. When the outgoing wave corresponds to radiated waves, the coefficients will depend on the oscillation velocities of the buoys
. To distinguish this case and simplify the expressions, instead of
, the notation
will then be used for the coefficients.
A general velocity potential in the interior domain underneath the cylinder that satisfies the Laplace equation and the boundary constraints can be written in the form:
where
are modified Bessel functions,
, and
. If the buoy is stationary, its velocity vanishes
, and the potential only contains the second, homogeneous term.
Consider an incident wave traveling along an angle
χ with the
x-axis,
where
is the amplitude of the waves. In the local coordinates of a buoy, the incident wave can be rewritten using properties of Bessel functions as:
In the most general case, all cylinders are free to oscillate, and there is an incident wave
. The potential in the exterior domain of any buoy will be a superposition of incident wave
, scattered and radiated waves
and incoming waves that are scattered off and radiated from the other buoys
,
,
By using Graf’s addition theorems for Bessel functions, the outgoing waves from one cylinder (Equation (2)) can be written as an incoming wave in the local coordinates of another cylinder as:
where the expressions for
are given in the
Appendix. Using this expression, the most general diffracted wave in the exterior domain (Equation (6)) takes the form:
where
is the combined coefficient of the scattered and radiated waves.
Continuity between the interior (Equation (3)) and exterior solutions (Equation (8)) and their derivatives along the boundary
between the interior and exterior domains imply the infinite system of equations:
together with an expression for the coefficients
γ in the interior solution in terms of the coefficients
. The matrices
and
and their components are defined in the
Appendix.
To solve for the unknown coefficients
in Equation (9), we truncate the indices
corresponding to the summation over the angular eigenfunctions
at
and the indices
corresponding to the summation over the vertical eigenfunctions at
. The solution now becomes semi-analytical, with the finite system of linear equations:
The single-body diffraction matrix
will simply be denoted
B in what follows. The
N equations in Equation (10) can now be combined into a single matrix equation as:
where the three vectors
,
and
are of length
, and the diffraction matrix is a square matrix of the form:
where each submatrix is a square of size
.
Solving the multiple scattering problem now amounts to solving for the unknown coefficients
in Equation (11) by computing the inverse of the diffraction matrix. This is the most computationally-demanding task of the problem and is the problem that has been addressed in
Section 2.3 by introducing a maximal interaction distance cut-off.
With the coefficients
determined, the fluid velocity potentials in the exterior and interior domains of each buoy are determined, and the dynamical forces can be computed as described in
Section 2.2.
Due to the linearity of the problem, the scattering and radiation problem can be solved independently. The scattering problem is the solution to the wave scattering of incident waves among fixed cylinders, i.e., all . The radiation problem corresponds to the case when all cylinders are free to move, but there is no incident wave, . In both cases, the (incident and radiated) waves will be scattered in the array, and the solution is found by solving the matrix equation (Equation (11)).
2.2. Dynamical Forces and Power Absorption
Once the fluid velocity potentials have been obtained, the dynamical forces can be readily obtained as surface integrals over the wetted surfaces of the buoys,
. In the heave direction and in the frequency domain, this corresponds to:
where the coefficients
are determined from the expression in Equation (A4) in the
Appendix.
The heave excitation force corresponds to the case when the buoys are stationary and subject to an incident wave, i.e., in Equations (10)–(11). The radiation force corresponds to the case when there is no incident wave, i.e., in the same equations.
The dynamics of each WEC is determined by a coupled system of equations between the buoy and the translator in the generator. Under the assumption of a stiff connection line between the buoy and the translator, the two equations can be combined into one and take the following form in the time domain:
where
is the vertical position of the buoy,
ρ is the water density and
,
are the masses of the buoy and translator, respectively. The power take-off damping of the generator is modeled here by a constant coefficient Γ. The radiation force can be divided into one part proportional to the velocity of the buoy and one part proportional to the acceleration,
, where
and
B are the added mass and radiation damping. In the frequency domain, this corresponds to
.
The excitation force in the frequency domain is given by the expression in Equation (13), with all buoys stationary, . Implicit in this expression is the product with the frequency domain amplitude of the incident waves, and we can write where is the amplitude independent part of the expression.
The equations of motion in the frequency domain then take the form:
or equivalently,
, where we defined a transfer function
. By computing the inverse Fourier transform
, the position of the buoy in the time domain can be obtained.
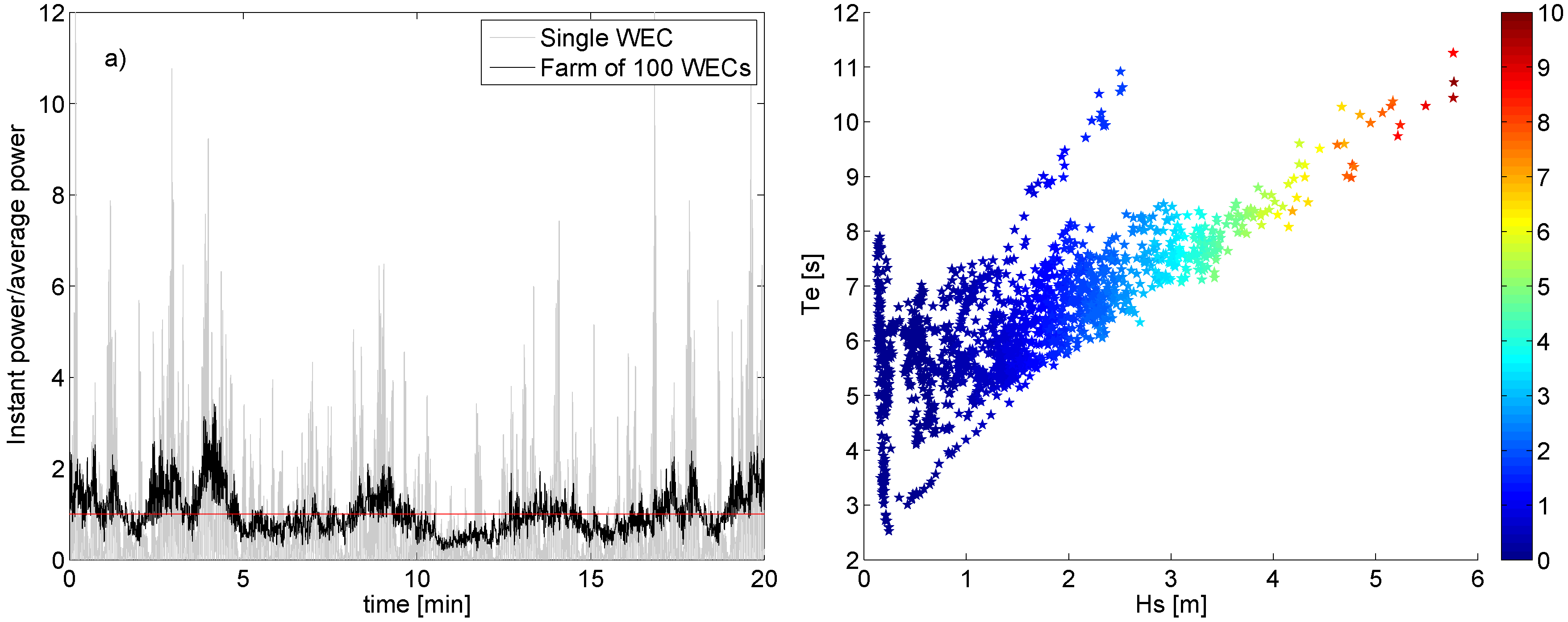
With the position of the buoy determined, the absorbed wave power at any time instant can now be computed as
. The instantaneous power absorbed by the full farm is then given by the sum:
The time series of wave data are collected in sea states of 30 min, each characterized by significant wave height
and energy period
. The absorbed power for single devices and the full farm that is computed in
Section 3 is the time-averaged power absorbed during each sea state.
The wave power transported per unit width of the wave front can be written in terms of the significant wave height and energy period by
. This is an approximation that might underestimate the wave energy in shallow waters, but is sufficiently accurate for the system studied in this paper [
27]. The wave energy incident onto a buoy of radius
R is thus
. The capture width ratio (CWR) reflects how much of the wave power is incident on the device that is absorbed [
28],
where the bar denotes the time-averaged value of the absorbed power. The capture width ratio is often used to compare the absorption and efficiency of different wave energy devices.
2.3. Interaction Distance Cut-Off
As discussed in
Section 2.1, the most computationally-extensive part of solving the multiple scattering problem is to solve for the unknown coefficients in Equation (11) by inverting the diffraction matrix. The off-diagonal matrices
in the diffraction matrix in Equation (12) contain all of the diffraction coupling terms between the WECs
. Each of these submatrices are square matrices of the size
, and the full diffraction matrix is hence a square matrix of size
. When computing multiple scattering between all devices in an array, all of these matrices are non-zero, and the diffraction matrix takes the form:
where all of the asterisks represent matrices
and
are identity matrices. The matrix in this example corresponds to an array with 20 devices. To solve the multiple scattering problem, this diffraction matrix must be inverted, which poses a very challenging computational task as the array size increases.
We now introduce the notion of interaction distance cut-off
. For a given wave energy farm, a maximal distance is specified, and coupling terms
are only included in the diffraction matrix if they are closer to each other than the specified interaction distance cut-off. That is, only coupling terms between devices that are “close” are included in the diffraction matrix. For large arrays, this will result in a diffraction matrix that is sparse. For example, the above matrix may take the form:
where only the non-zero submatrices have been included. Various numerical methods can be applied to compute the inverse of sparse matrices, and the computational cost is reduced significantly. For even larger arrays, this reduction in computational cost and memory usage enables the modeling of large farms, which would not be possible for full, dense diffraction matrices.
Since the method with the interaction distance cut-off neglects only coupling terms between devices that are far away from each other in the farm, one can expect that the final result will not be affected to a large extent. This conjecture will be investigated and confirmed in
Section 3.
The interaction distance cut-off can be set to any arbitrary distance; it may include only nearest neighbor interactions, or interactions between all devices within a specified distance, or all devices in the farm. No assumptions have to be made on the configuration of the array, on different length scales or equally-spaced WECs.
This paper focuses on arrays of small point-absorber WECs. In commercial large-scale farms, these devices will most likely be deployed in clusters to minimize the cost of deployment, sea cable and enable enough space for deployment and maintenance vessels. In the commercial wave energy farm that is currently being constructed by Seabased Industry AB and the energy company Fortum on the Swedish west coast, this is the case; a set of 36 WECs are currently deployed in a cluster and connected to the same marine substation (www.seabased.com). A large-scale farm may then consist of several of these clusters, each containing a number of WECs and a power system connecting them all together and transmitting the power to shore. For this reason, the large farms modeled in
Section 3 are mainly comprised of several smaller clusters. Albeit the interaction distance cut-off can be set arbitrarily, in the modeling of large farms, for clarity, we therefore restrict to a full interaction, interactions within each cluster and only single-body diffraction and no interaction by radiated waves.
2.4. Numerical Simulations
The constant parameters in the equation of motion (Equation (15)) that have been used in the simulations are the mass of the buoy tons and translator tons, power take-off damping kNs/m, buoy radius m, draft m, water density kg/m and water depth m.
All of the waves used in the paper are time-series of irregular waves measured off-shore at a test site in Lysekil on the Swedish west coast. A commercial Datawell Waverider buoy has been used to measure the surface elevation at a sampling rate of 2.56 Hz. All waves collected during each day have been separated into time intervals of 30 min each, for which the significant wave height and energy period have been computed,
i.e., 48 sea states per day have been measured. All waves measured during January 2015 have been used in the simulation, corresponding to 48 sea states × 31 days
wave climates, ranging from
m to
s. The sea state used in the plots where only one sea state has been used is characterized by significant wave height
m and energy period
s. The waves are assumed to be propagating along the
x-axis, except for the simulations shown in
Figure 2, where all incident wave angles have been considered.
Figure 2.
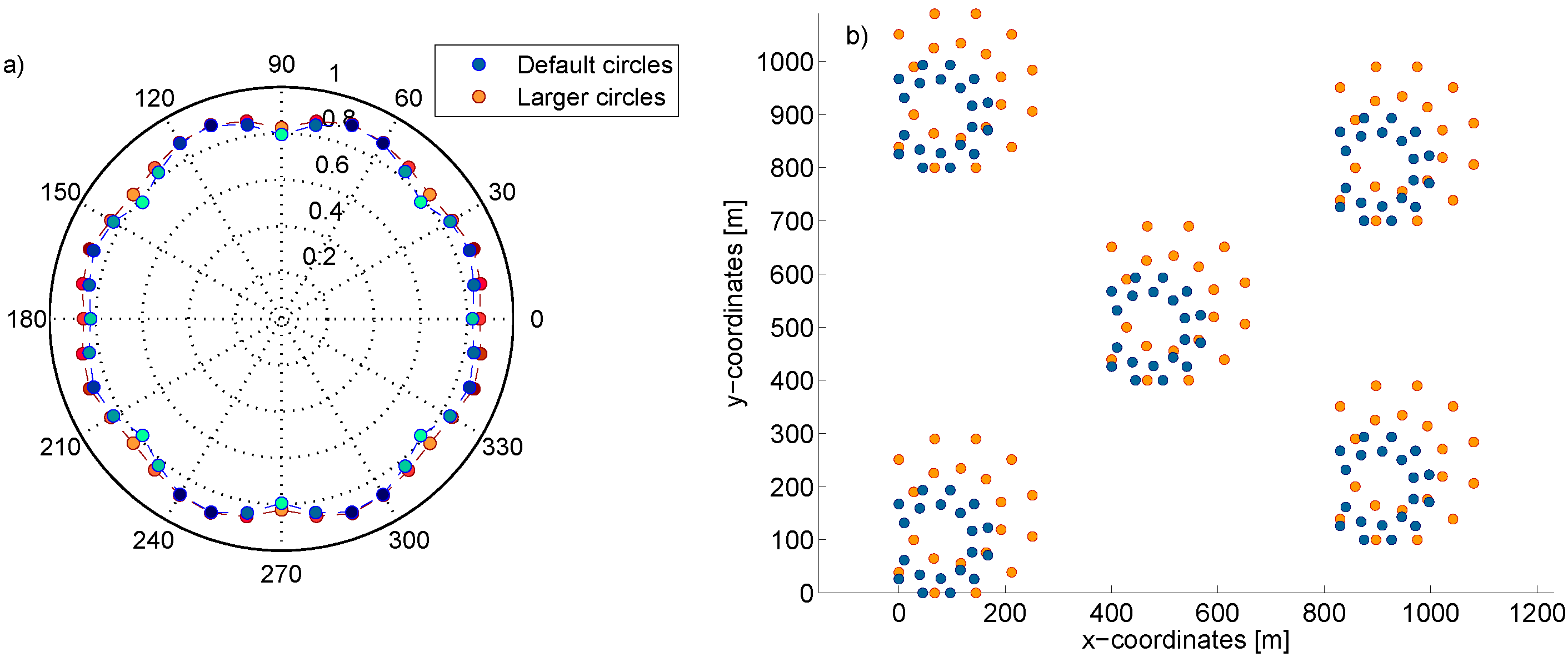
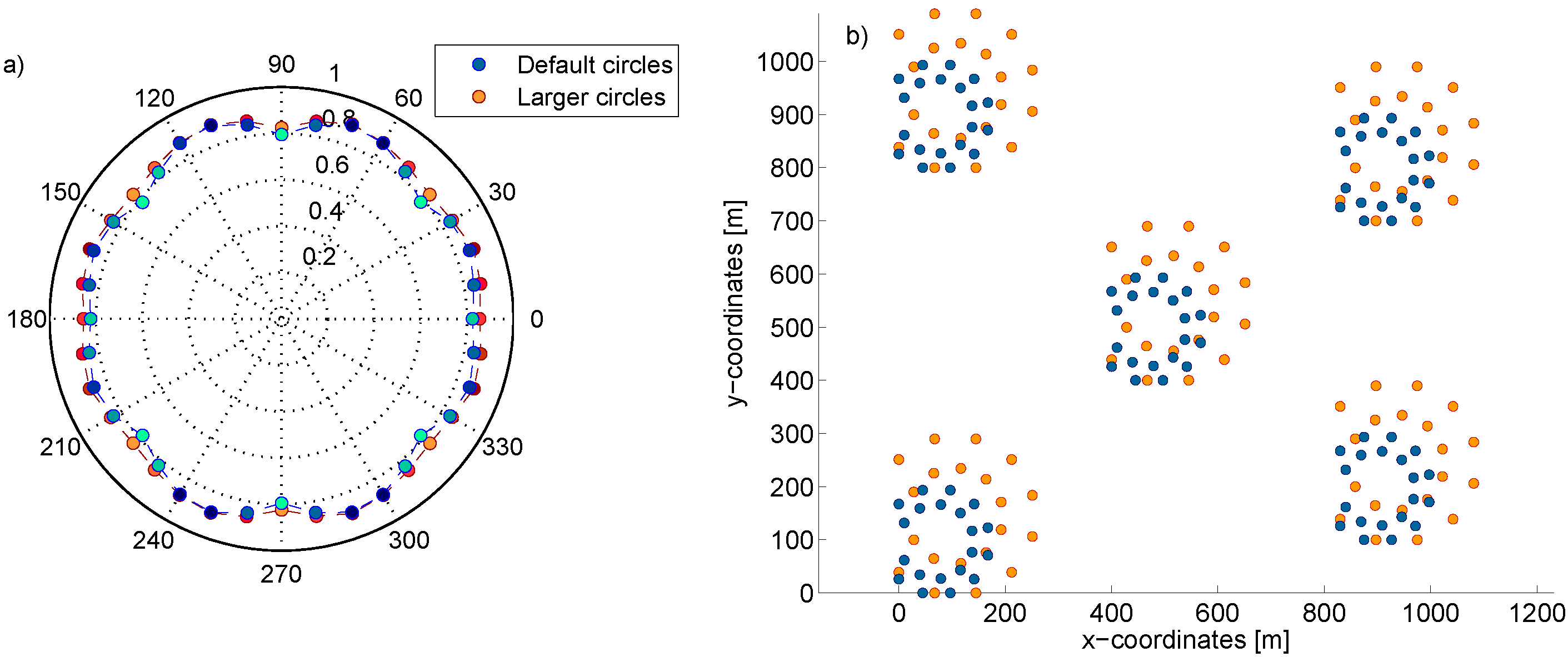
(
a) Interaction factor
q (radial coordinate in the plot) of an array with 100 WECs (shown in
Figure 2b), as a function of incident wave angle. An angle of zero degrees corresponds to the configuration in
Figure 2b and
Figure 3 with the incident wave along the
x-axis. The blue/cyan points correspond to the default smaller circles, whereas the red/orange points correspond to the larger circle configuration. (
b) Configuration of the two farms with 100 WECs in five double circles with different inner and outer radii.
Figure 2.
(
a) Interaction factor
q (radial coordinate in the plot) of an array with 100 WECs (shown in
Figure 2b), as a function of incident wave angle. An angle of zero degrees corresponds to the configuration in
Figure 2b and
Figure 3 with the incident wave along the
x-axis. The blue/cyan points correspond to the default smaller circles, whereas the red/orange points correspond to the larger circle configuration. (
b) Configuration of the two farms with 100 WECs in five double circles with different inner and outer radii.
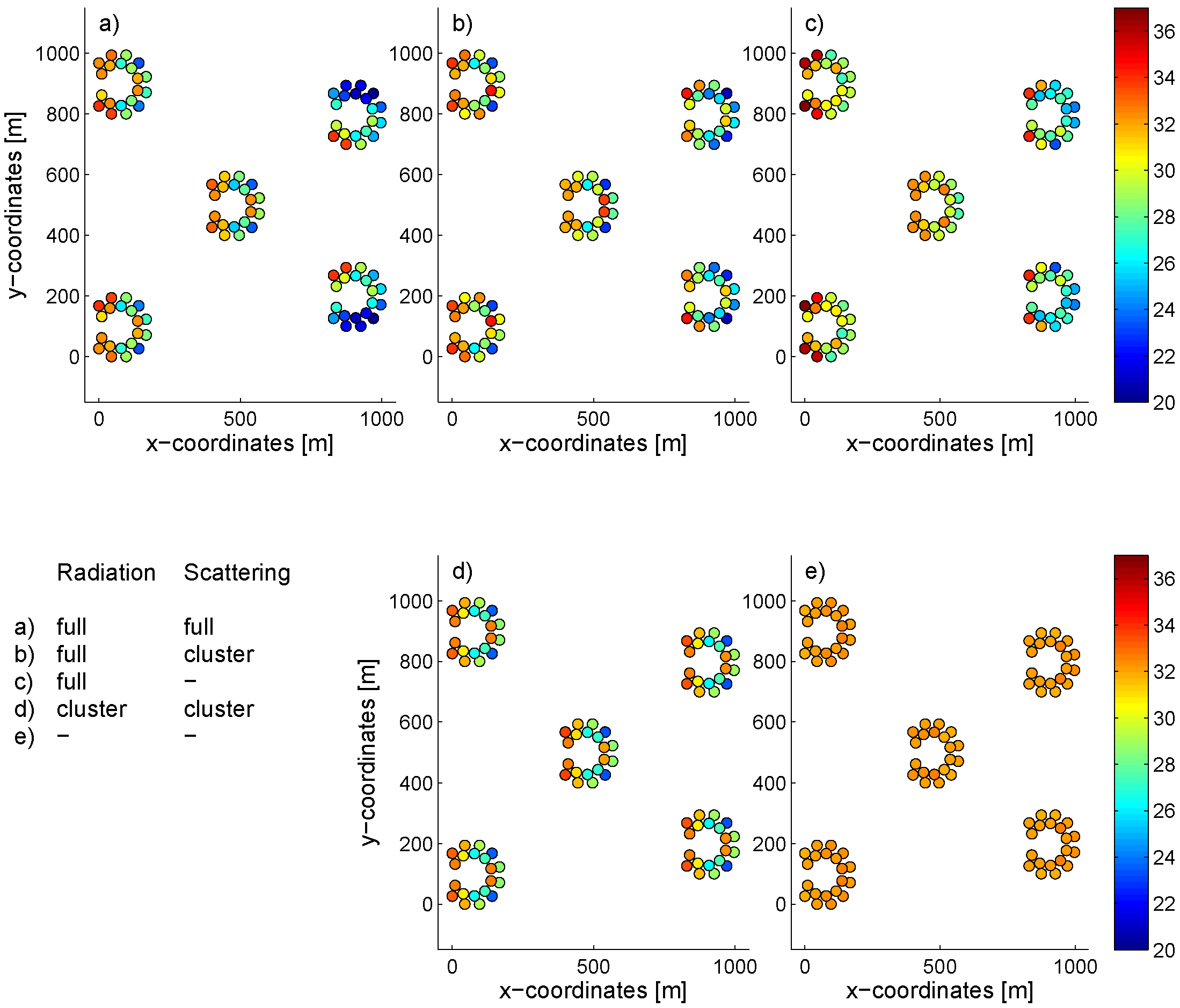
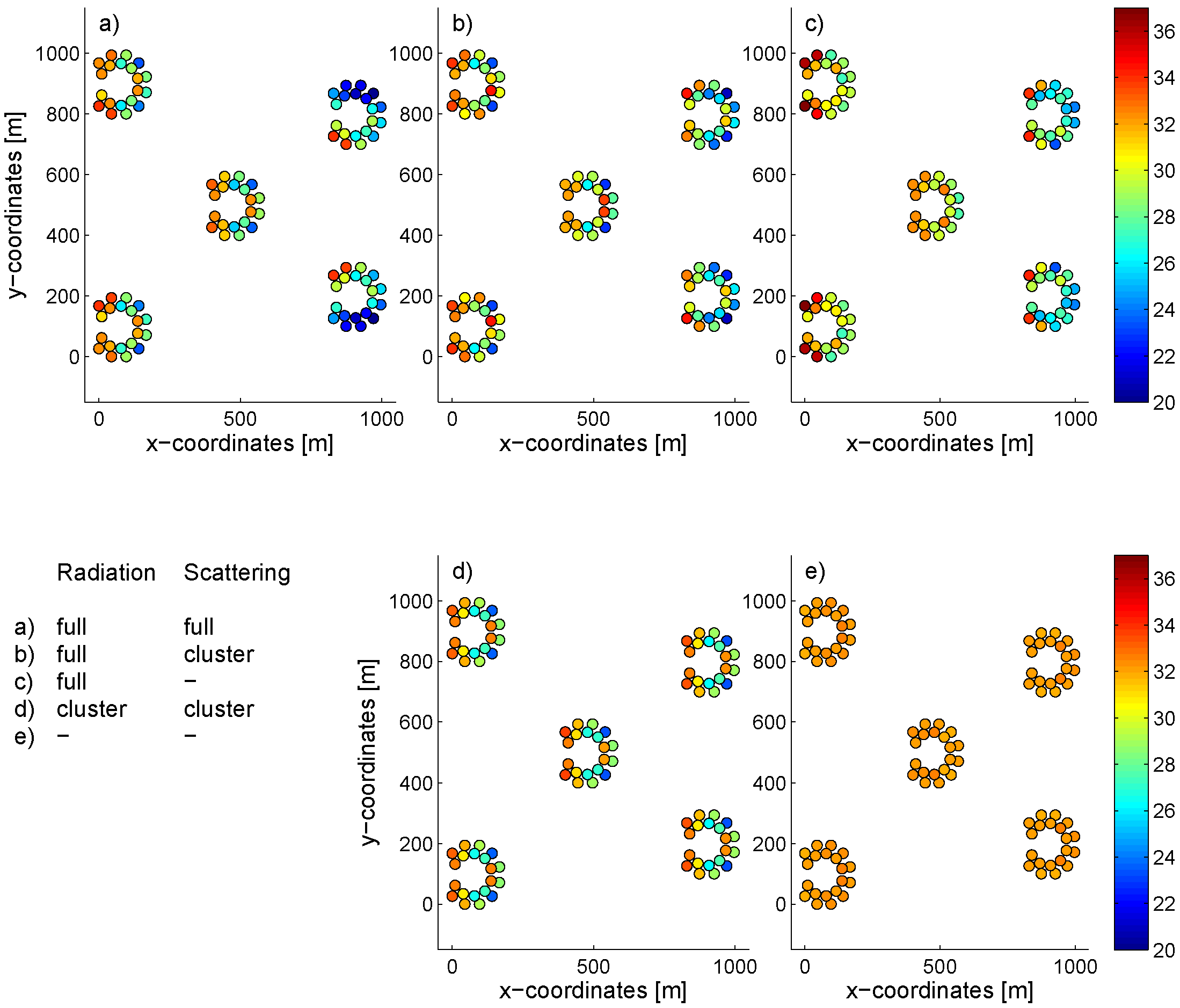
Figure 3.
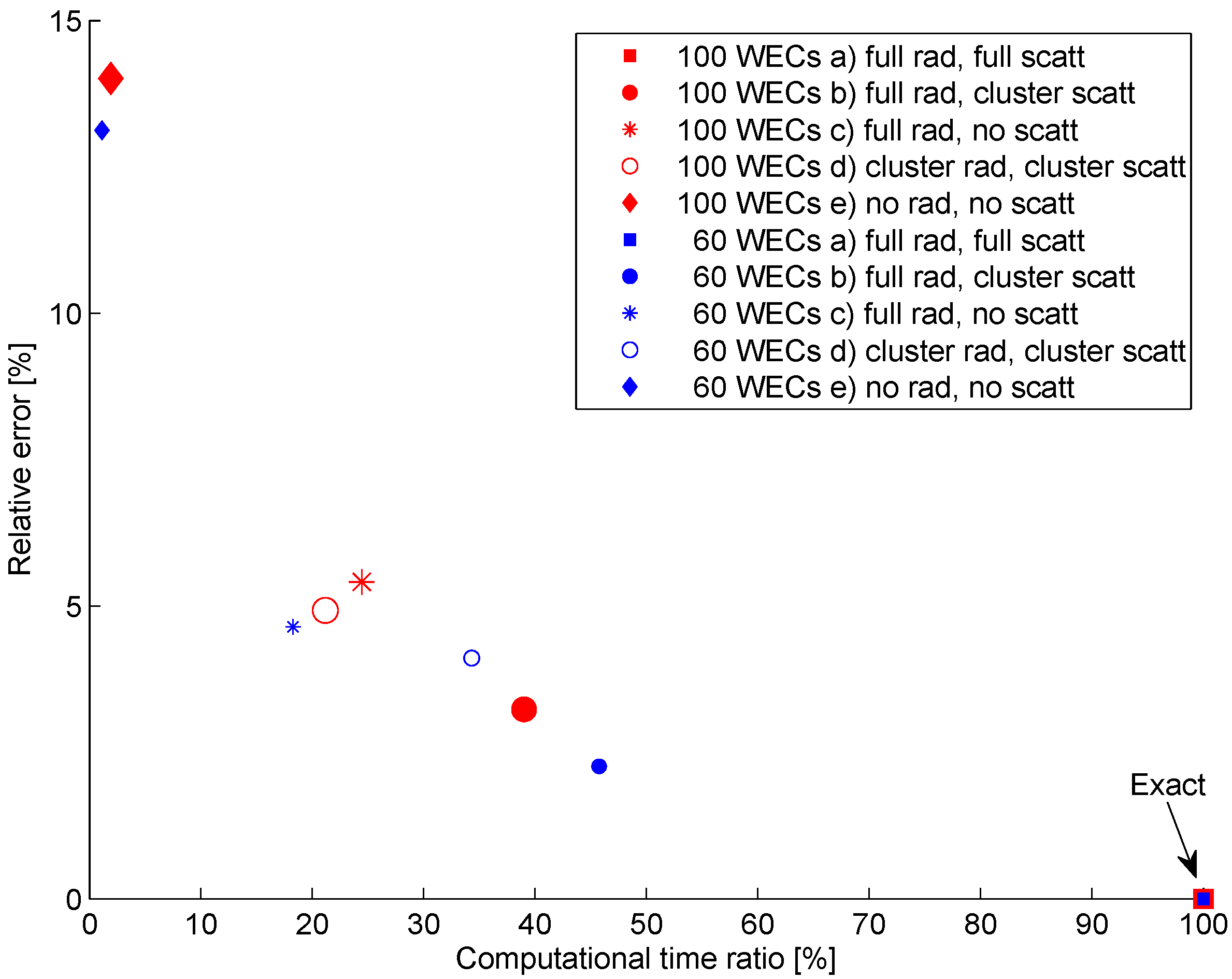
Farm of 100 WECs divided into five clusters. The capture width ratio in % for each WEC is shown with the color bar. The hydrodynamic interaction between the devices has been computed in five different ways with decreasing accuracy, shown in the table. (a) Full interaction is computed between all devices for diffracted and radiated waves; (b) Radiated waves between all WECs are taken into account, but diffraction is computed only within each cluster; (c) All WECs interact with radiated waves, but no multiple diffraction interaction is included; (d) Interaction is computed only within the cluster, both for radiated and diffracted waves; (e) No hydrodynamic interaction between the devices.
Figure 3.
Farm of 100 WECs divided into five clusters. The capture width ratio in % for each WEC is shown with the color bar. The hydrodynamic interaction between the devices has been computed in five different ways with decreasing accuracy, shown in the table. (a) Full interaction is computed between all devices for diffracted and radiated waves; (b) Radiated waves between all WECs are taken into account, but diffraction is computed only within each cluster; (c) All WECs interact with radiated waves, but no multiple diffraction interaction is included; (d) Interaction is computed only within the cluster, both for radiated and diffracted waves; (e) No hydrodynamic interaction between the devices.
The multiple scattering model presented in
Section 2.1 with the integrated interaction distance cut-off presented in
Section 2.3 has been implemented as a MATLAB code and connected to a time domain model with the time series of measured waves as the input. The system of equations in Equation (10) has been truncated at
and
. The inversion of the diffraction matrix is computed using the object-oriented factorization algorithm of [
29].
The computations of small arrays of nine WECs have been executed on a standard desktop PC with four parallel Intel Xeon 3.07-GHz processors and 6 MB RAM. The simulations with the software WAMIT have been performed on the same computer. The computations for large farms have been executed on eight parallel Opteron 6220 cores running at 3 GHz with 4 GB RAM each on the high performance computer cluster UPPMAX.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}