

Implementation of an Alternative Frequency-Dependent Three-Phase Transmission Line Model Based on the Folded Line Equivalent Model in MatLab-Simulink

 ,
, 

Abstract
:1. Introduction and Literature Review
2. The Folded Line Equivalent
3. Our Approach: Proposed Folded Line Equivalent
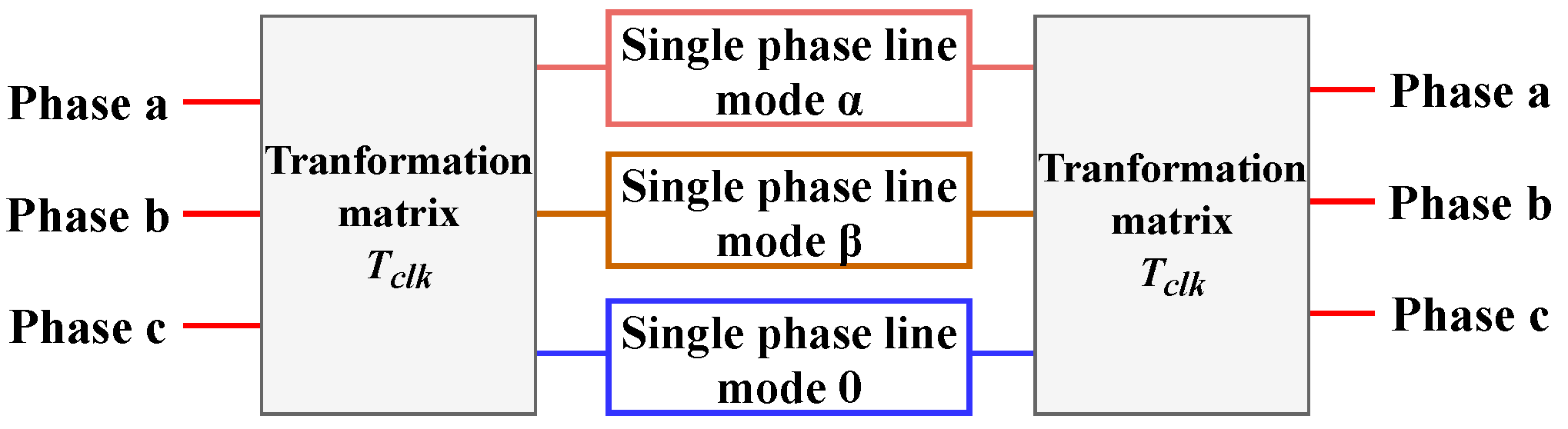
3.1. Modal Transformation: Circuit Representation of Clarke’s Matrix
3.2. FLE Transformation: Circuit Representation of the Proposed Transformation Matrix
3.3. Computation of the Nodal Admittance Matrix of Each Mode
3.4. Circuit Representation of the FLE Parameters of Each Mode
4. Results
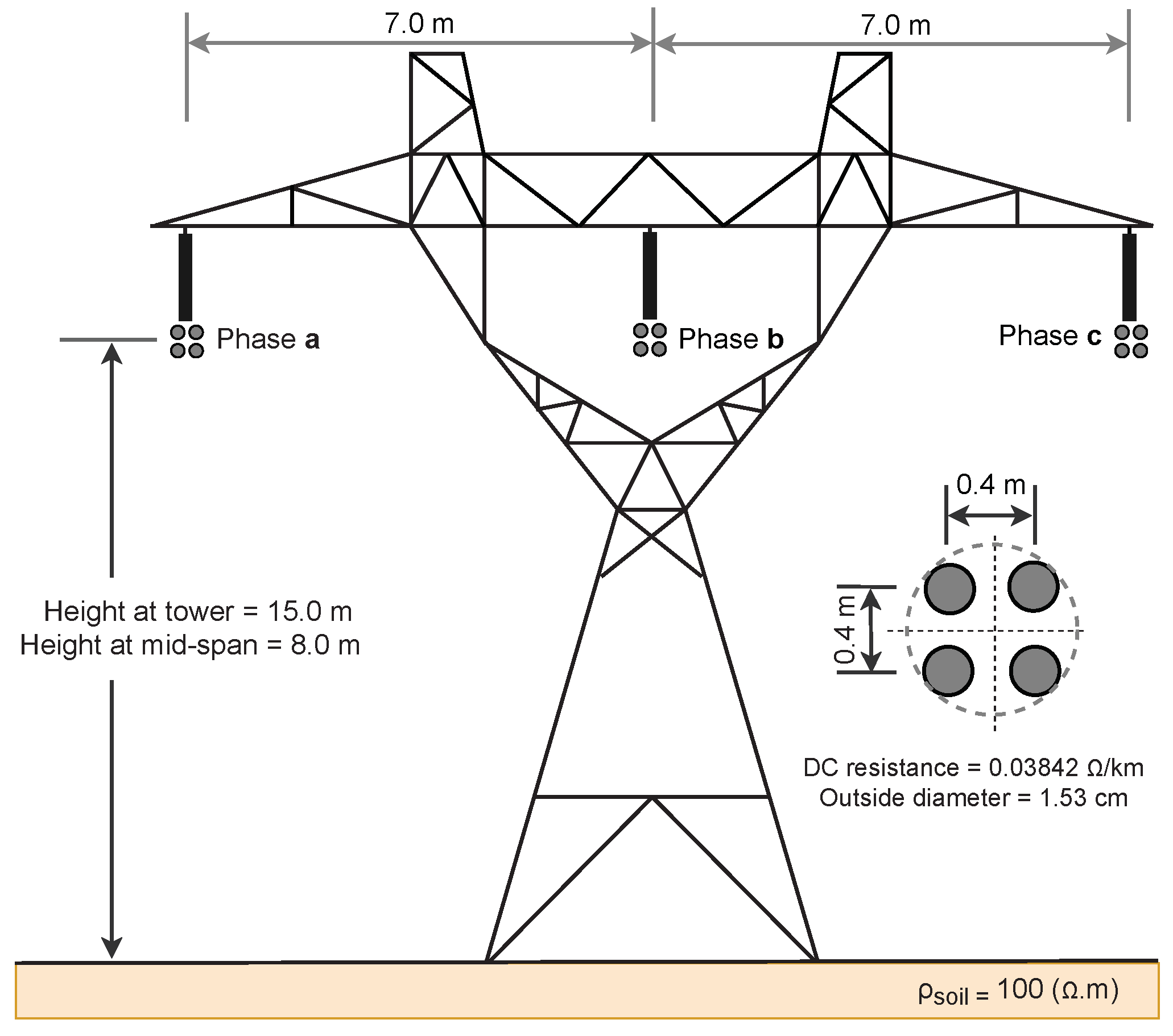
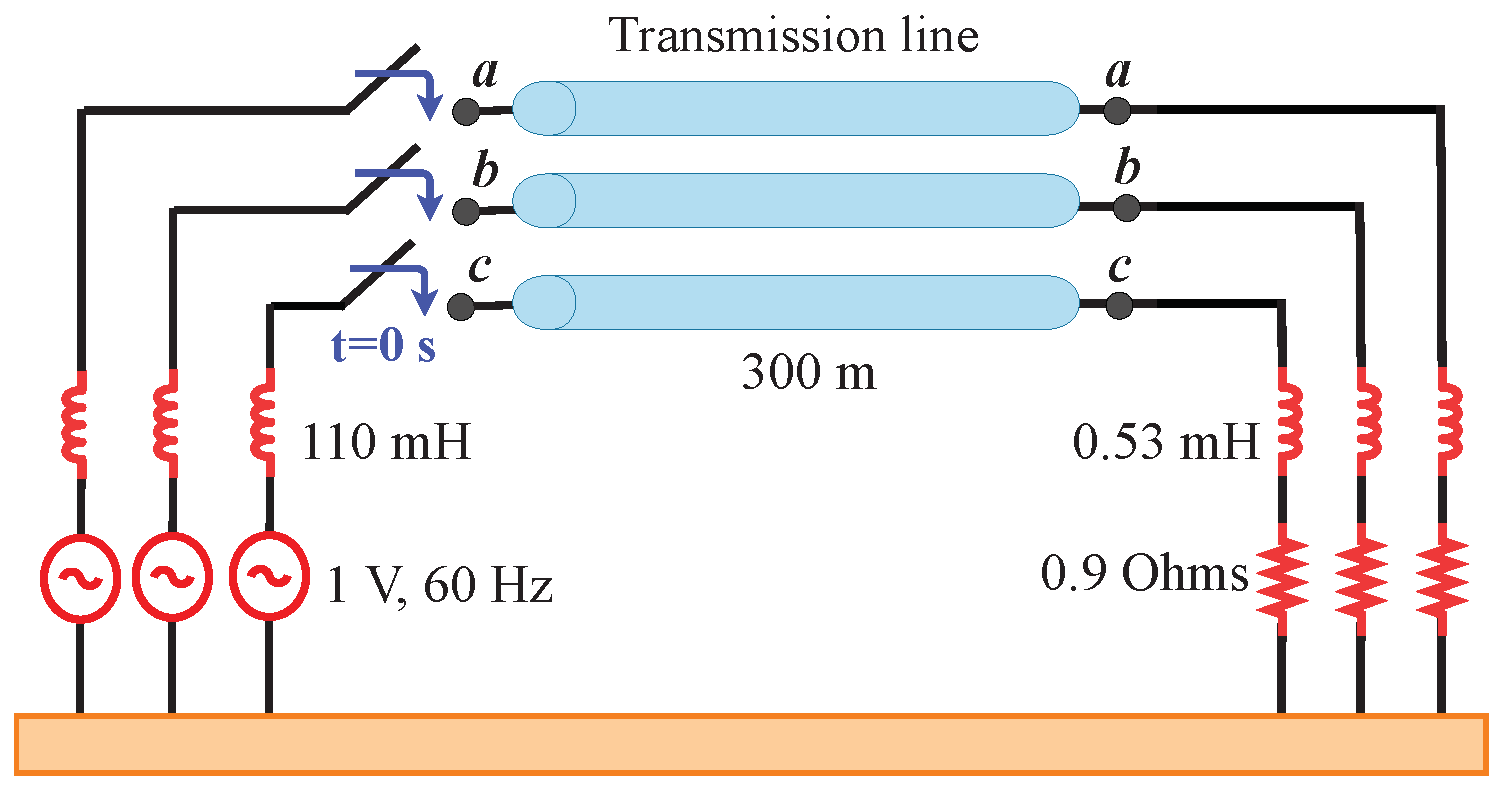
4.1. Line Configuration and Simulation Approach
- Computed the p.u.l. line parameters of the TL of Figure 5 using the PSCAD/EMTDC’s Line Constants Program;
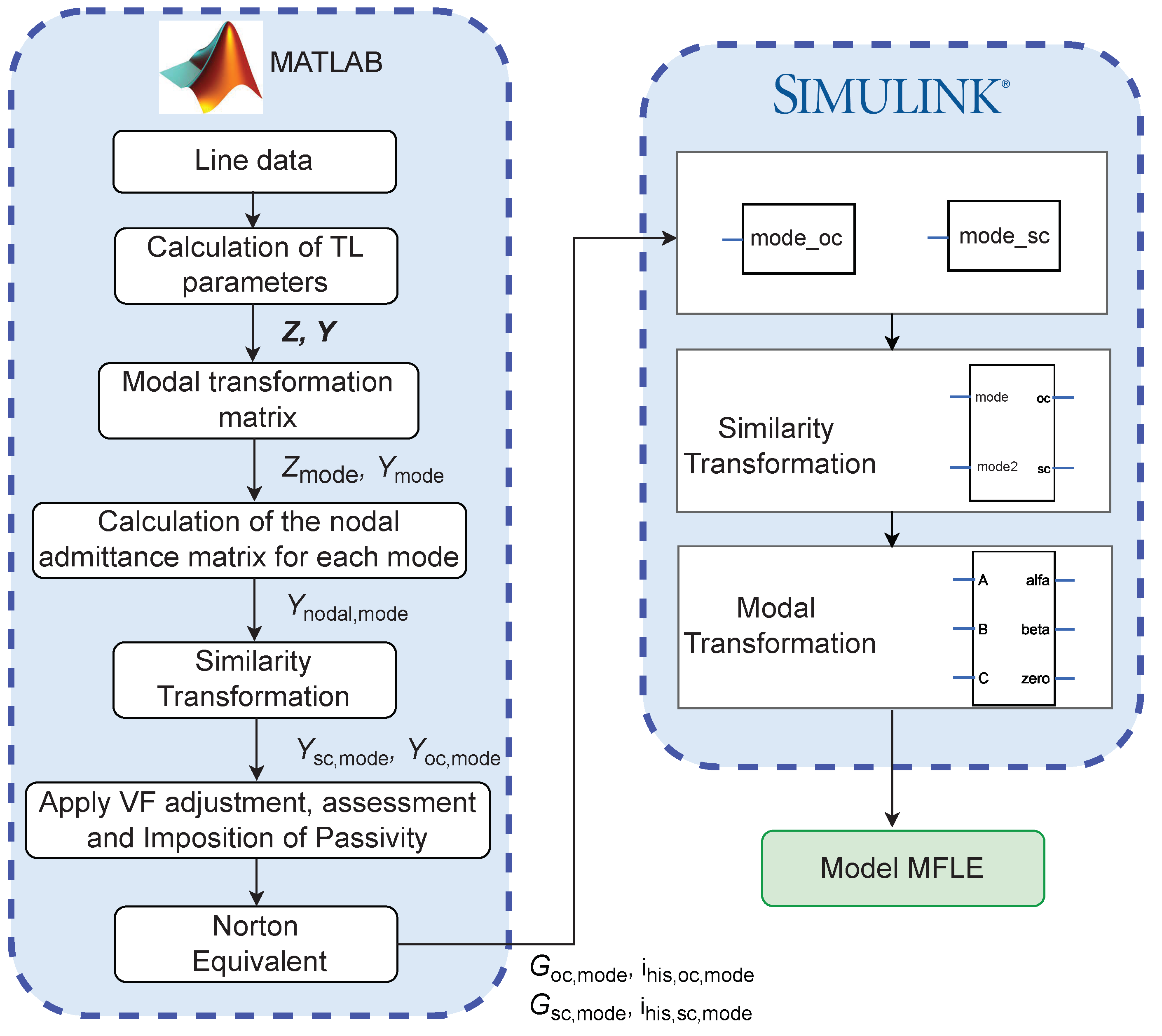
- Simulated the TL using the proposed approach, implemented in Matlab/Simulink, as shown in Figure 4;
- Simulated the TL using PSCAD/EMTDC’s ULM;
- Compared the outputs of both models.
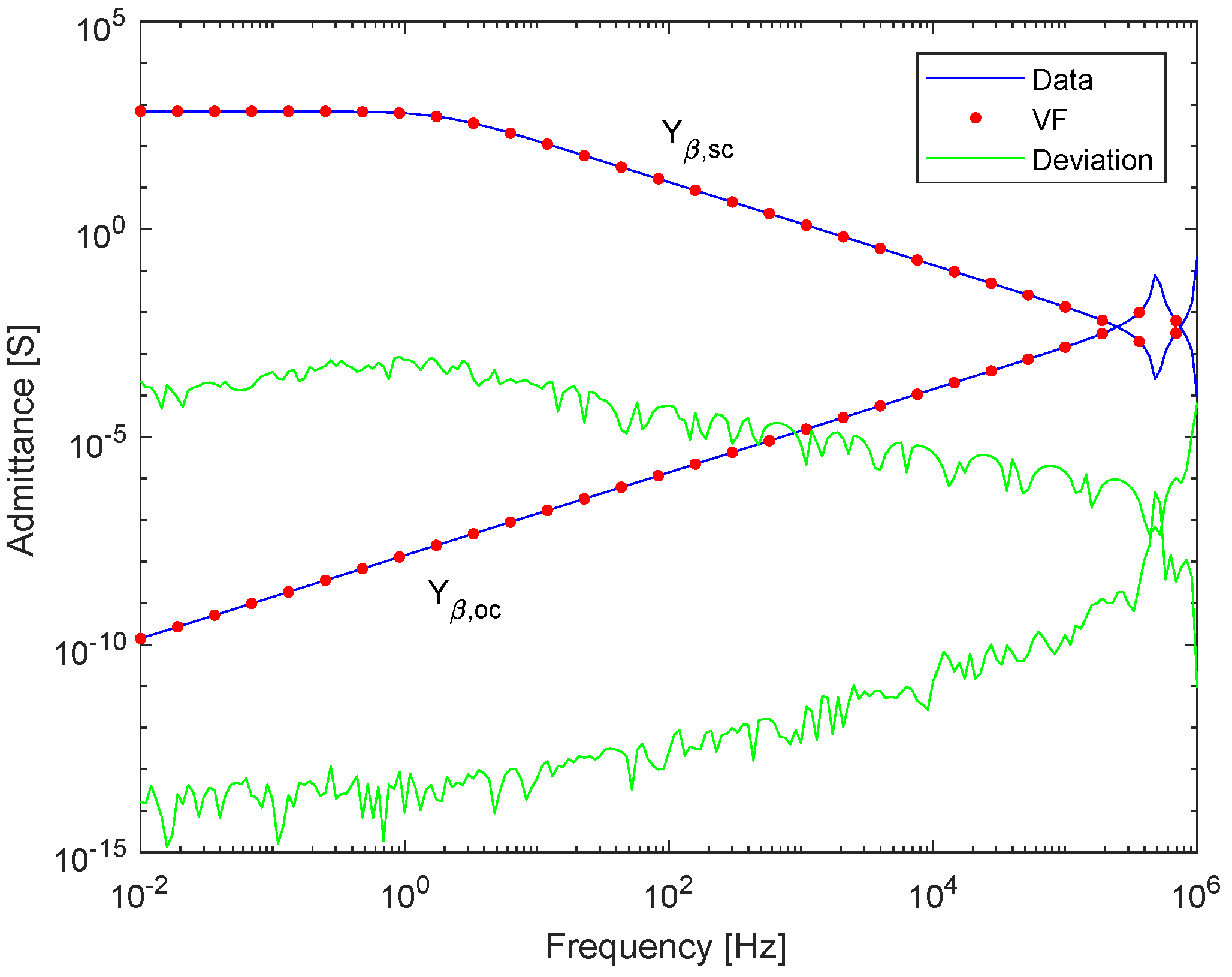
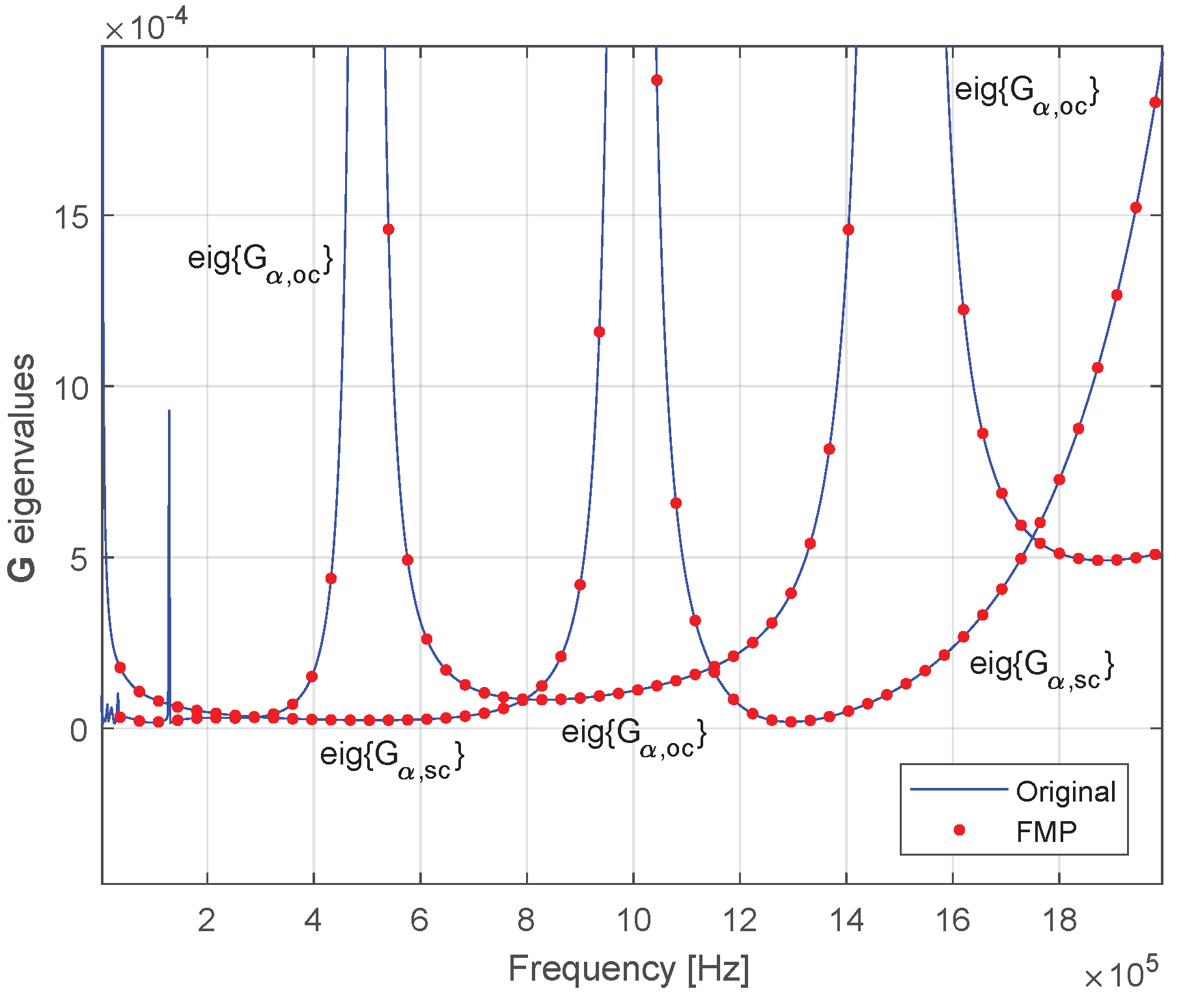
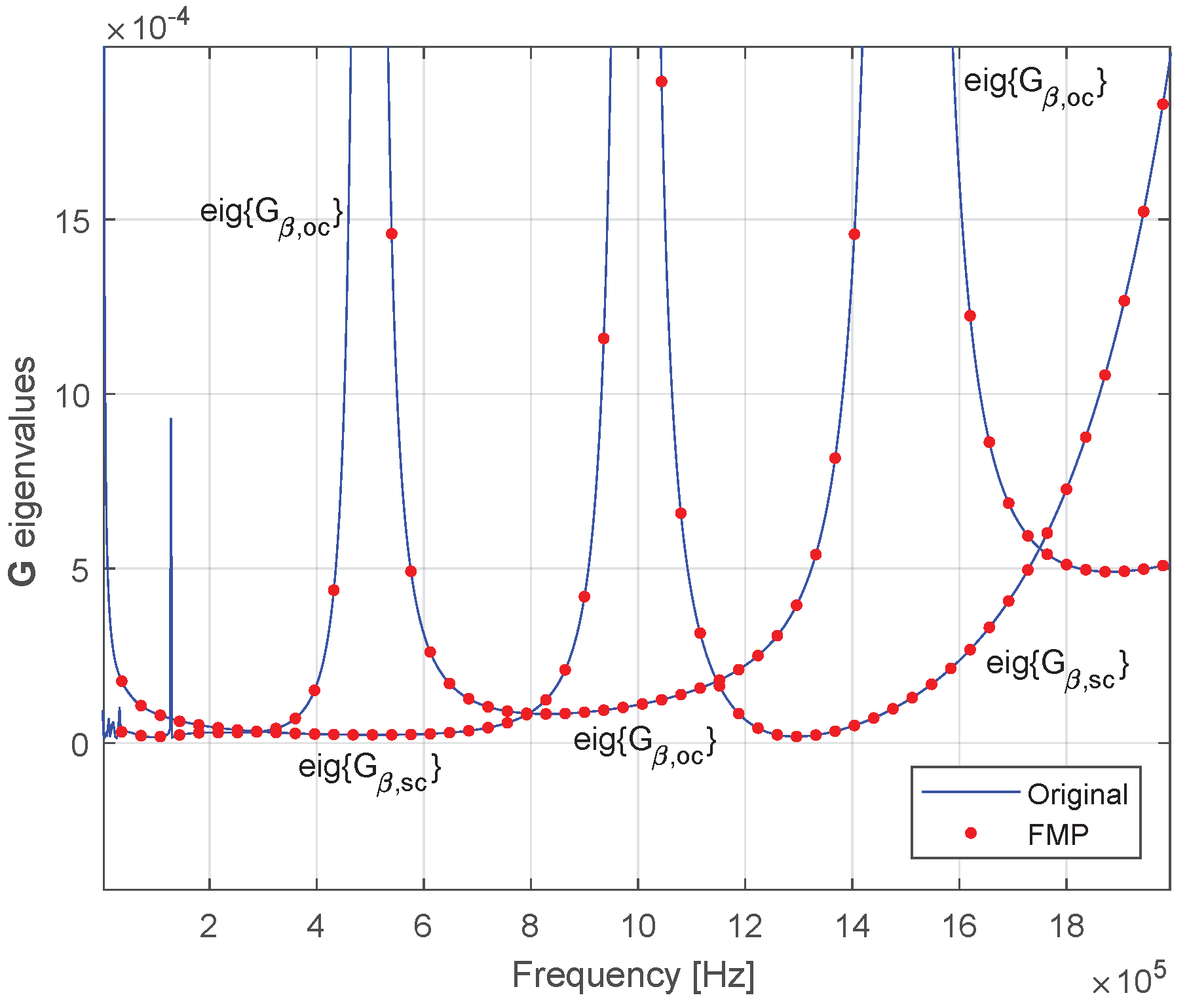
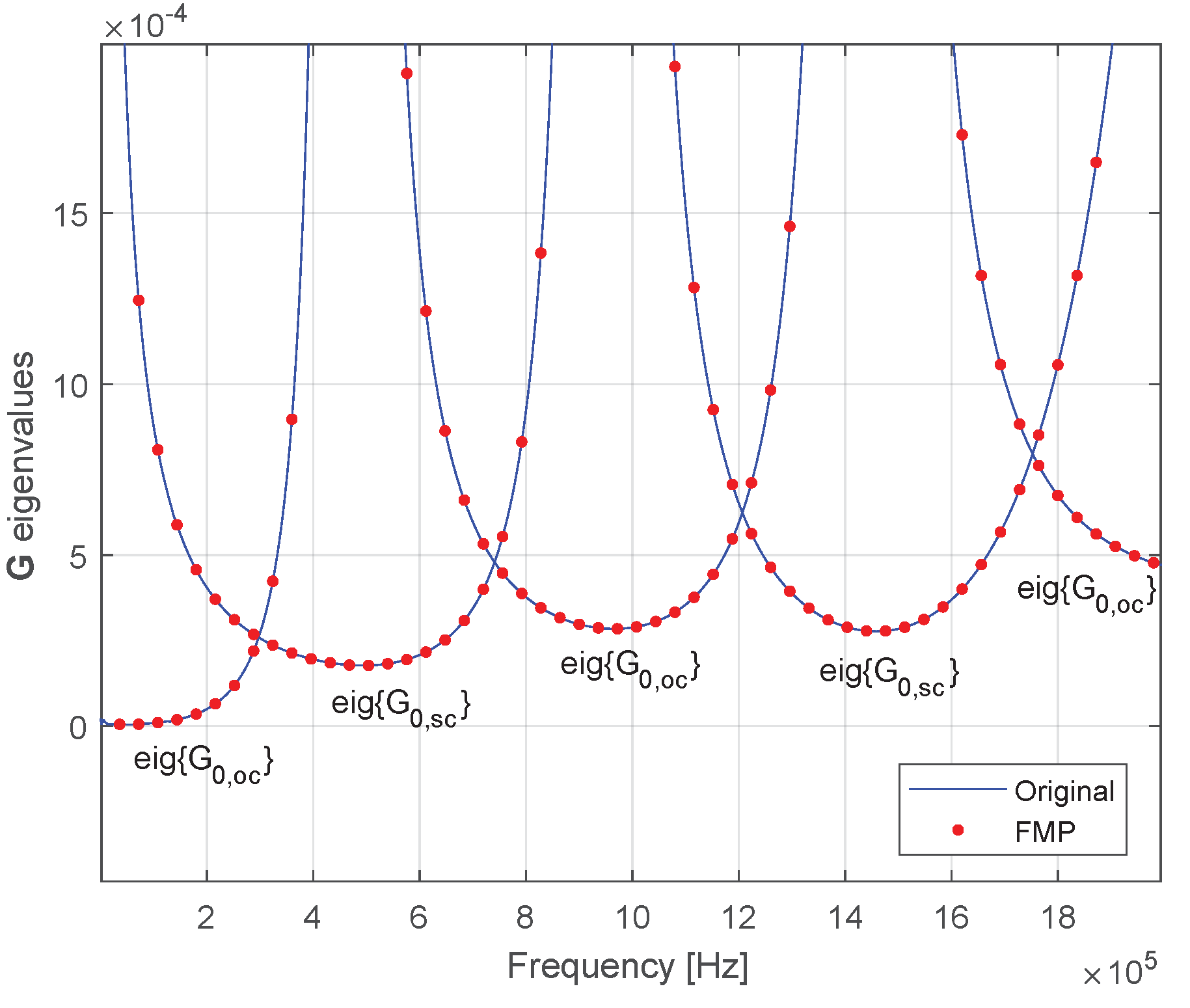
4.2. Fitting Procedure and Passivity Enforcement
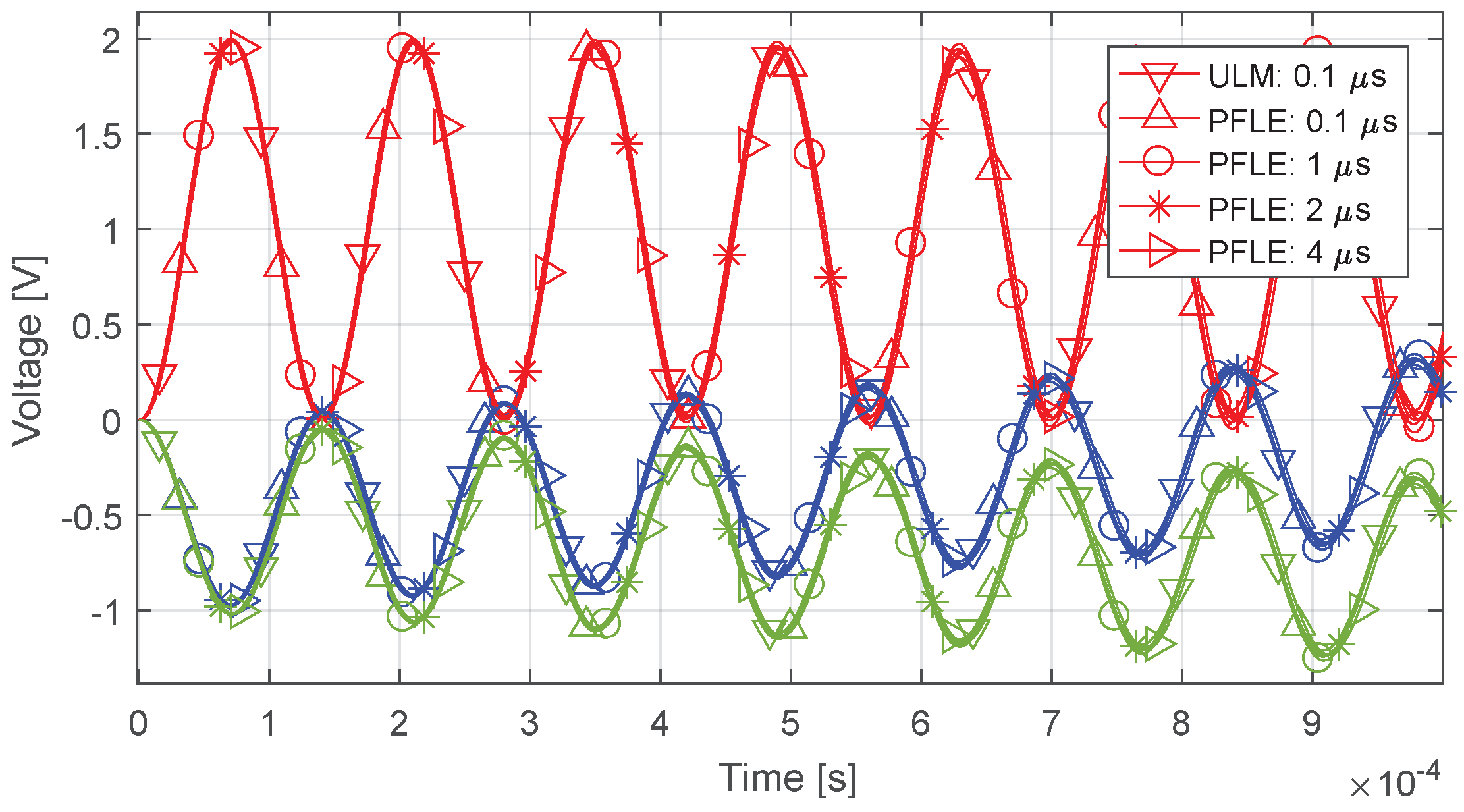
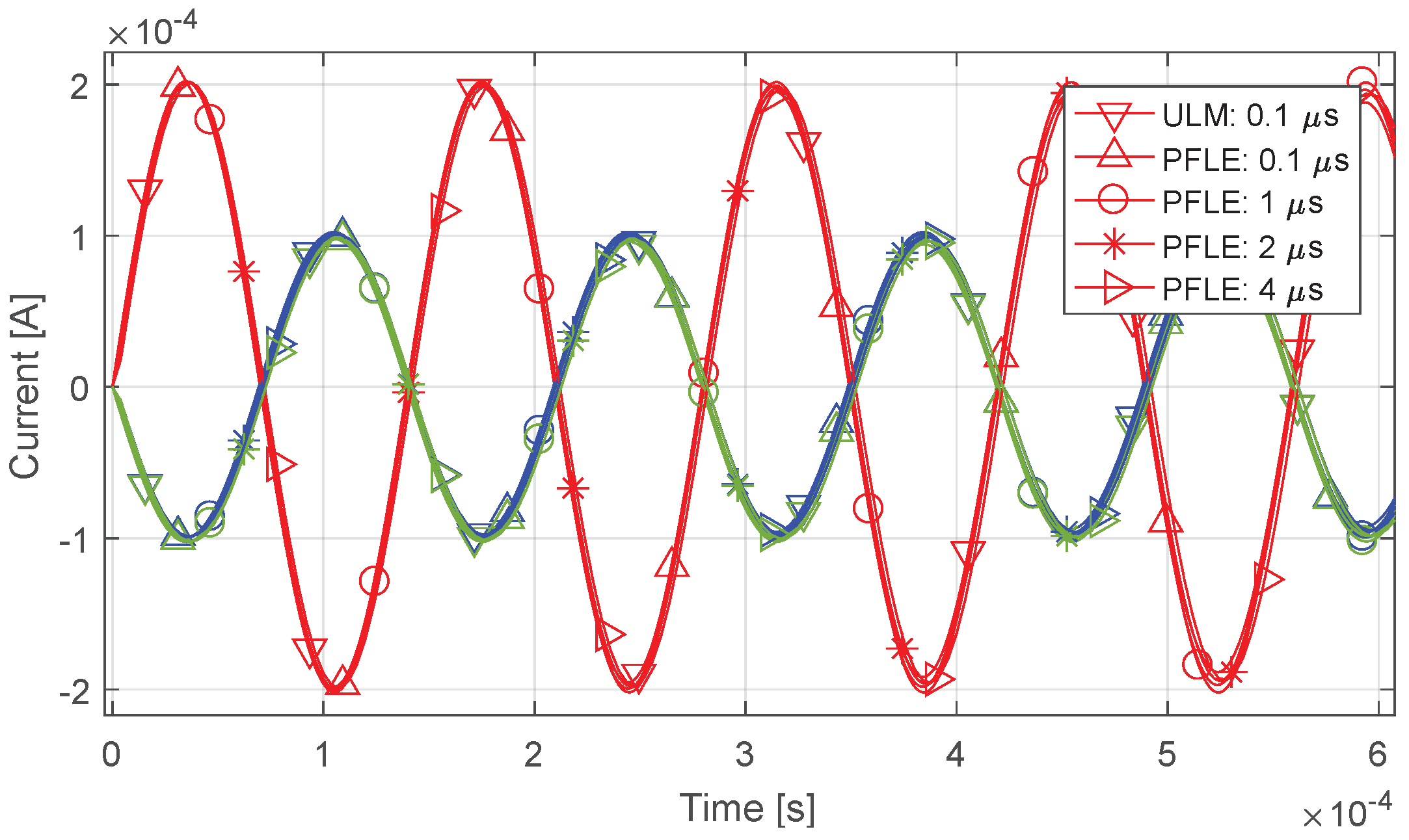
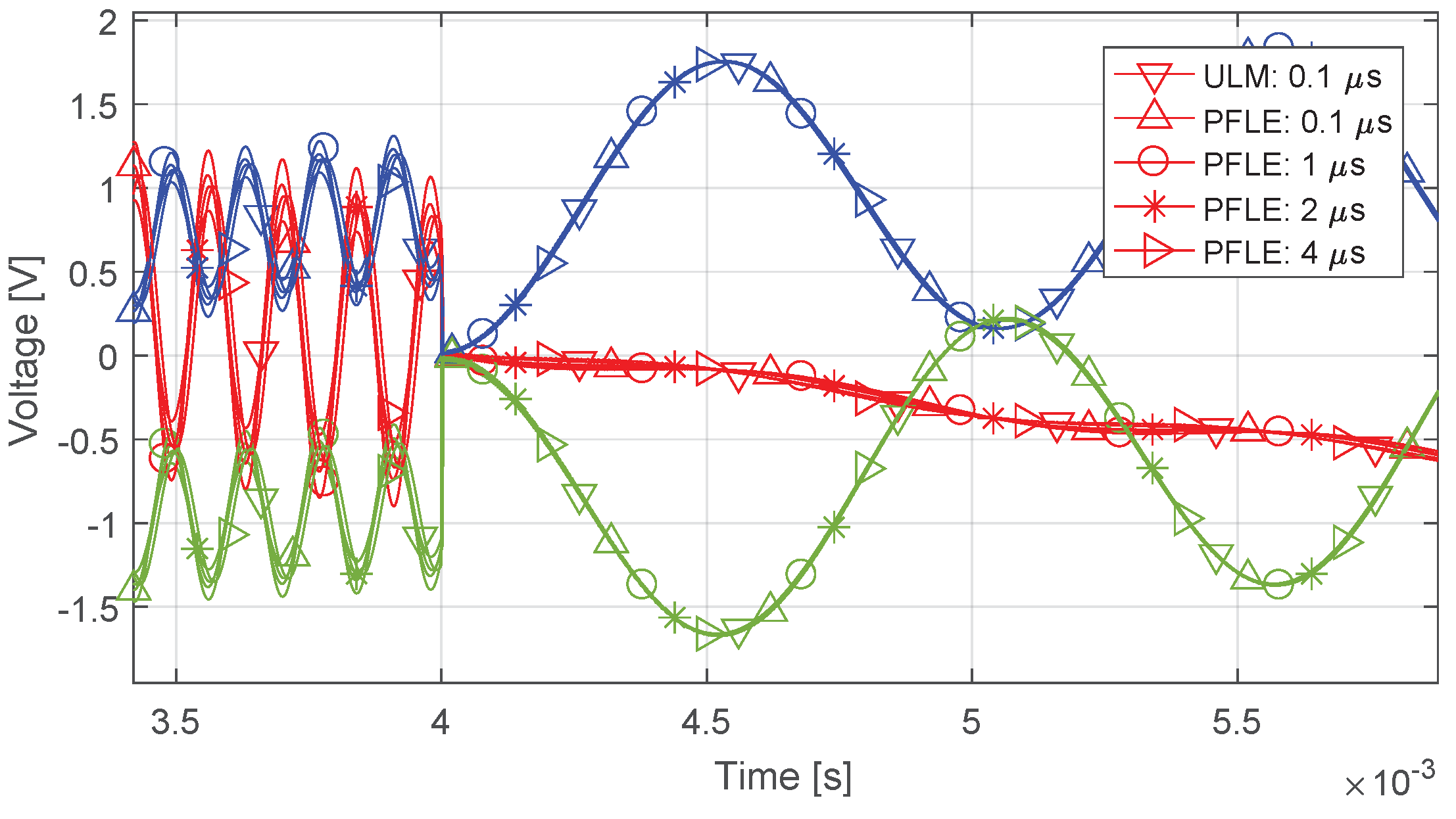
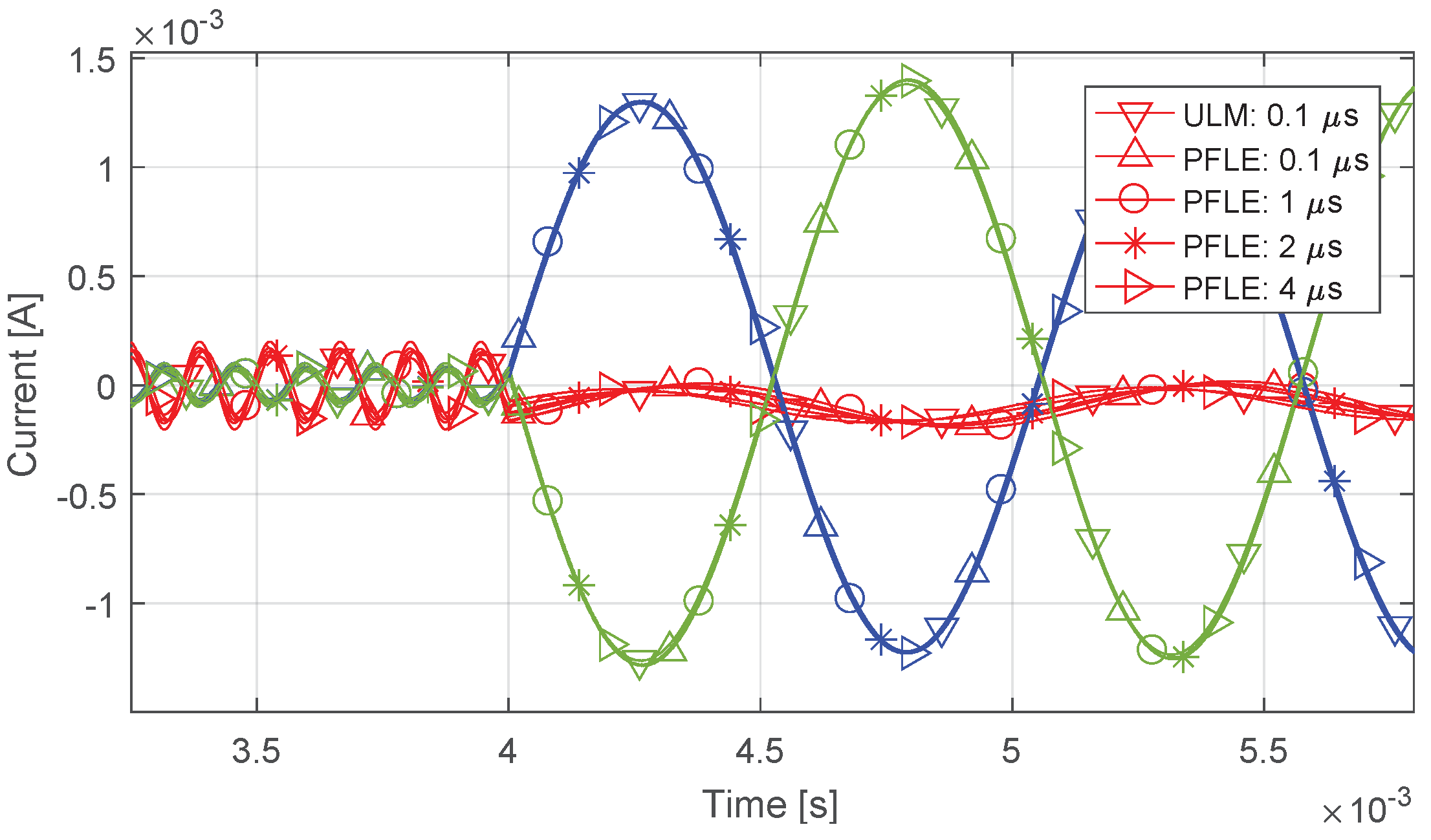
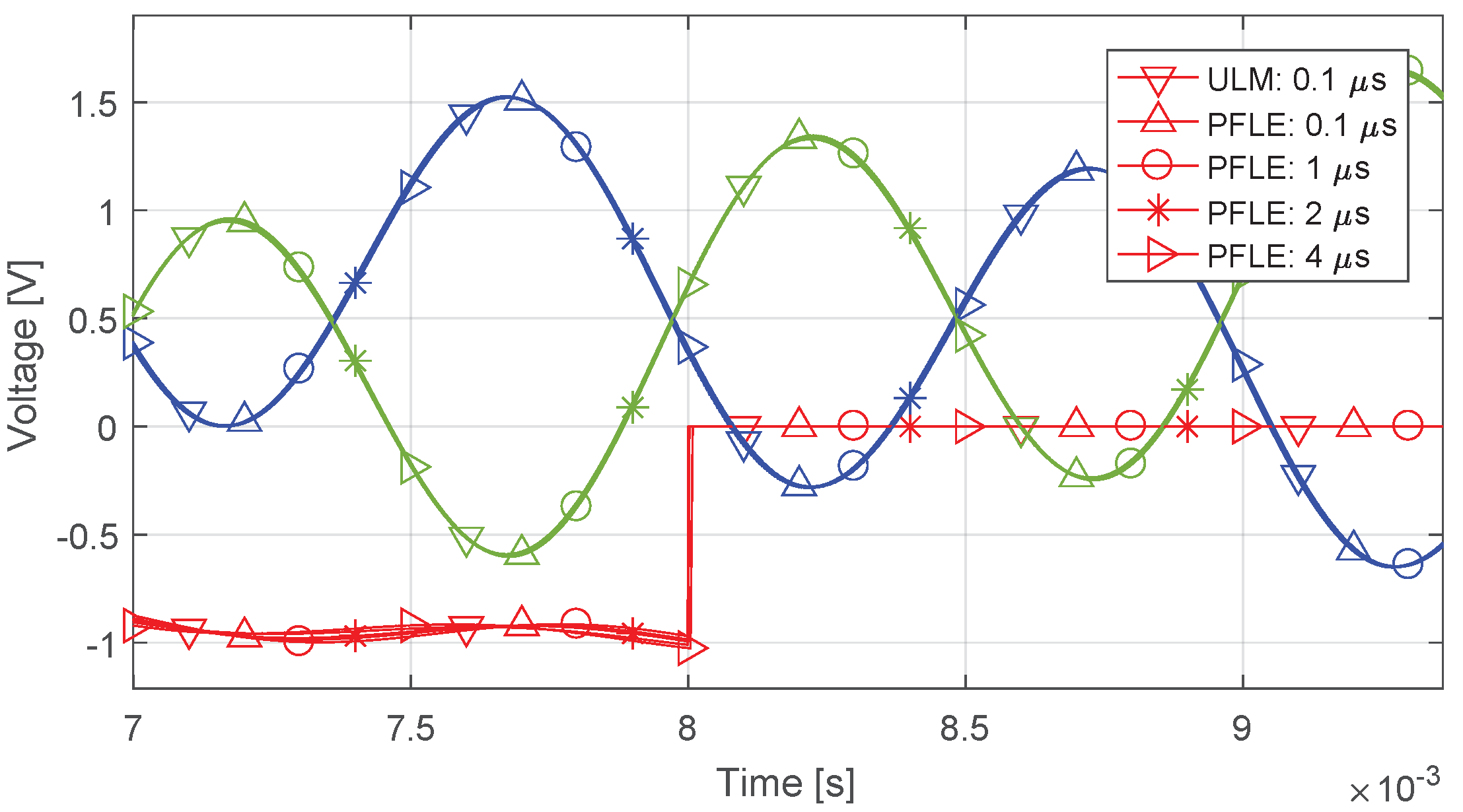
4.3. Open-Circuit, Capacitive Load, and Single-Phase Fault
4.3.1. Simulation Layout
- 1.
- Left open-circuited when the line is energized;
- 2.
- Connected to a capacitive load at 4 ms;
- 3.
- A single-phase fault occurs at 8 ms.
4.3.2. Results
- 1.
- 2.
- 3.
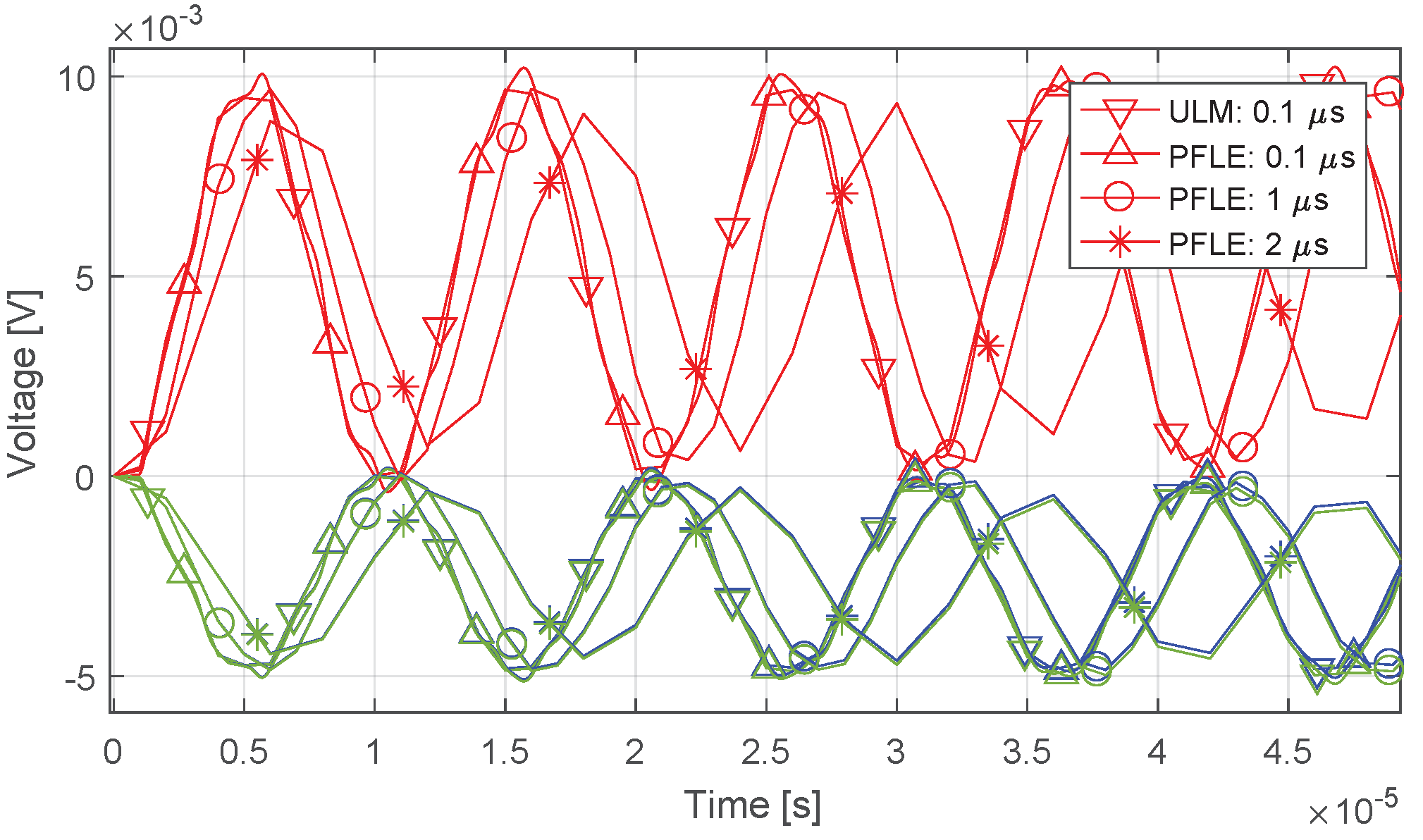
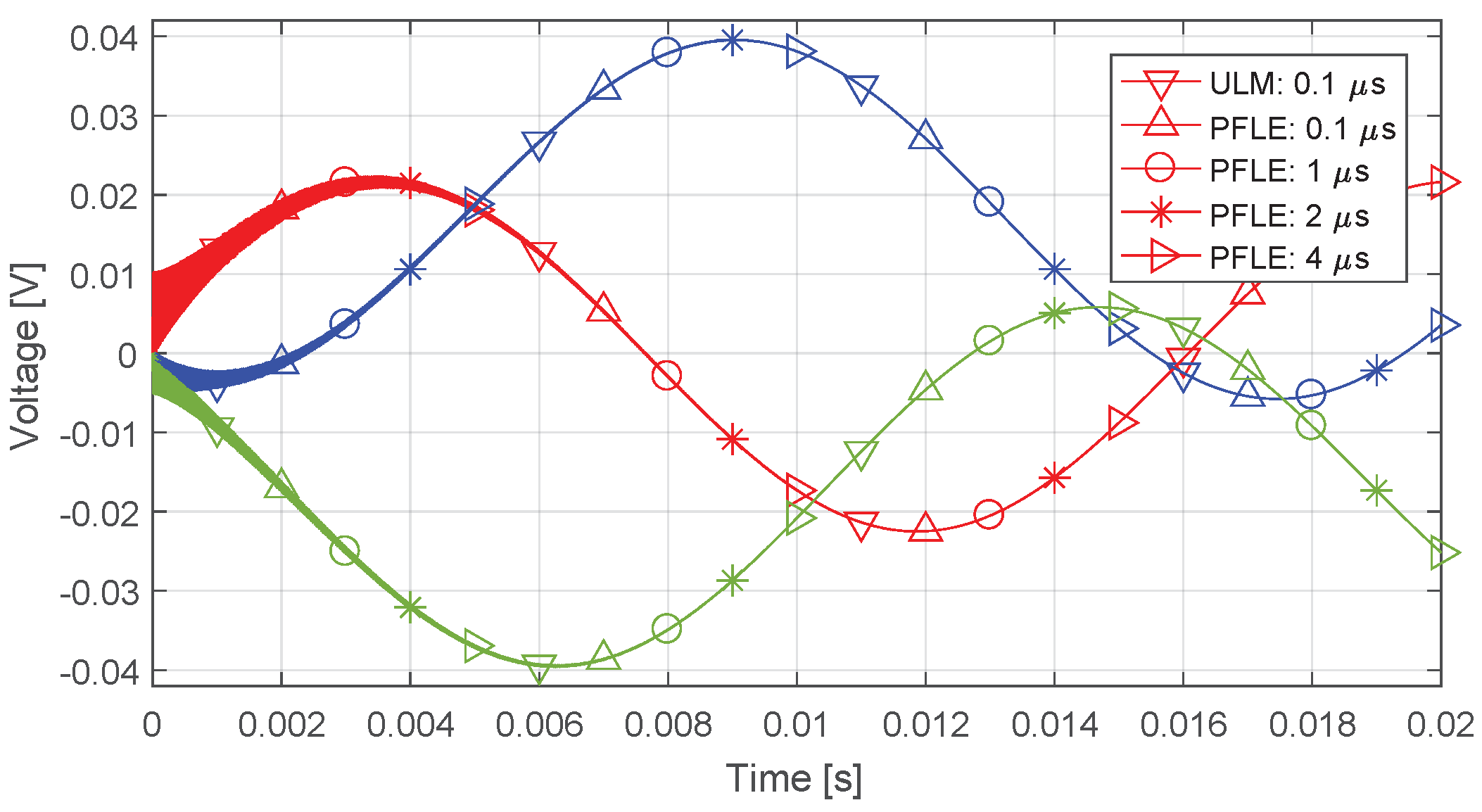
4.4. Line Energization
4.4.1. Simulation Layout
4.4.2. Results
4.5. Error
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TL | Transmission line |
| ATP-EMTP | Alternative Transient Program-Electromagnetic Transients Program |
| ULM | Universal Line Model |
| PSCAD | Power Systems Computer Aided Design |
| EMRP-RV | Electromagnetic Transients Program-Restructured Version |
| FLE | Folded Line Equivalent |
| VF | Vector Fitting |
| p.u.l. | per unit length |
| FMP | Fast Modal Perturbation |
| PFLE | Proposed Folded Line Equivalent |
References
- Marti, J.R. Accurate Modeling of Frequency-Dependent Transmission Lines in Electromagnetic Transient Simulations. IEEE Power Eng. Rev. 1982, 2, 29–30. [Google Scholar] [CrossRef]
- Laurent Dubé European EMTP-ATP Users Group e.V. Users Guide to Models in ATP. April 1999. Available online: https://pdfcoffee.com/users-guide-to-models-in-atp-acknowledgments-pdf-free.html (accessed on 30 January 2022).
- Morched, A.S.; Gustavsen, B.; Tartibi, M. A universal model for accurate calculation of electromagnetic transients on overhead lines and underground cables. IEEE Trans. Power Deliv. 1999, 14, 1032–1037. [Google Scholar] [CrossRef]
- Manitoba HVDC Research Centre Inc. PSCAD-EMTDC Version 4.5 The Professional’s Tool for Electromagnetic Transients Simulation; Manitoba HVDC Research Centre, Inc.: Winnipeg, MB, Canada, 2008. [Google Scholar]
- EMTP-RV. 2021. Available online: http://emtp.com/ (accessed on 1 February 2022).
- Dommel, H.W. Digital Computer Solution of Electromagnetic Transients in Single-and Multiphase Networks. IEEE Trans. Power Appar. Syst. 1969, PAS-88, 388–399. [Google Scholar] [CrossRef]
- De Silva, H.M.J.; Kariyawasam, K.K.M.A.; Gole, A.M.; Nordstrom, J.E. Accurate time domain simulation of frequency dependent transmission line models for large time steps. In Proceedings of the International Conference on Power Systems Transients (IPST), Vancouver, BC, Canada, 18–20 July 2013. [Google Scholar]
- Gustavsen, B.; Semlyen, A. Admittance-Based Modeling of Transmission Lines by a Folded Line Equivalent. IEEE Trans. Power Deliv. 2009, 24, 231–239. [Google Scholar] [CrossRef]
- Gustavsen, B.; Semlyen, A. Rational approximation of frequency domain responses by vector fitting. IEEE Trans. Power Deliv. 1999, 14, 1052–1061. [Google Scholar] [CrossRef] [Green Version]
- Gustavsen, B. Improving the pole relocating properties of vector fitting. IEEE Trans. Power Deliv. 2006, 21, 1587–1592. [Google Scholar] [CrossRef]
- Simscape Electrical User’s Guide (Specialized Power Systems). Hydro-Quebec and Math Works. 2022. Available online: https://www.mathworks.com/help/physmod/sps/ (accessed on 1 February 2022).
- Morched, A.S.; Ottevangers, J.H.; Marti, L. Multi-port frequency dependent network equivalents for the EMTP. IEEE Trans. Power Deliv. 1993, 8, 1402–1412. [Google Scholar] [CrossRef]
- Semlyen, A.; Gustavsen, B. Phase-Domain Transmission-Line Modeling With Enforcement of Symmetry Via The Propagated Characteristic Admittance Matrix. IEEE Trans. Power Deliv. 2012, 27, 626–631. [Google Scholar] [CrossRef]
- Gustavsen, B. Validation of frequency-dependent transmission line models. IEEE Trans. Power Deliv. 2005, 20, 925–933. [Google Scholar] [CrossRef]
- Tavares, M.C.; Pissolato, J.; Portela, C.M. New mode domain multiphase transmission line model-transformation matrix modeling. In Proceedings of the POWERCON, International Conference on Power System Technology, Proceedings (Cat. No.98EX151), Beijing, China, 18–21 August 1998; Volume 2, pp. 855–859. [Google Scholar] [CrossRef]
- Colqui, J.S.L.; Timaná, L.; Caballero, P.T.; Kurokawa, S.; Filho, J.P. Implementation of modal domain transmission line models in the ATP software. IEEE Access 2022, 10, 15924–15934. [Google Scholar] [CrossRef]
- Gustavsen, B.; De Silva, H.M.J. Inclusion of Rational Models in an Electromagnetic Transients Program: Y-Parameters, Z-Parameters, S-Parameters, Transfer Functions. IEEE Trans. Power Deliv. 2013, 28, 1164–1174. [Google Scholar] [CrossRef]
- Gustavsen, B. Computer code for rational approximation of frequency dependent admittance matrices. IEEE Trans. Power Deliv. 2002, 17, 1093–1098. [Google Scholar] [CrossRef]
- Gustavsen, B. Fast Passivity Enforcement for Pole-Residue Models by Perturbation of Residue Matrix Eigenvalues. IEEE Trans. Power Deliv. 2008, 23, 2278–2285. [Google Scholar] [CrossRef]
- Gustavsen, B. Matrix Fitting Toolbox (User’s Guide and Reference); SINTEF Energy Research: Trondheim, Norway, 2009. [Google Scholar]
- Gustavsen, B. User’s Guide for Vectfit3.m (Fast Relaxed Vector Fitting); SINTEF Energy Research: Trondheim, Norway, 2008. [Google Scholar]
- Boyd, S.; Chua, L.O. On the passivity criterion for LTI n-ports. Circuit Theory Appl. 1982, 10, 323–333. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage | Current | ||||
|---|---|---|---|---|---|
| Phases | Model:t | NRMSD | Phases | Model:t | NRMSD |
| 1 (Figure 14) | PFLE: 0.1 s | 0.004 | 1 (Figure 15) | PFLE: 0.1 s | 1 × 10 |
| PFLE: 1 s | 0.003 | PFLE: 1 s | 3 × 10 | ||
| PFLE: 2 s | 0.003 | PFLE: 2 s | 1 × 10 | ||
| PFLE: 4 s | 0.005 | PFLE: 4 s | 2 × 10 | ||
| 2 and 3 (Figure 14) | PFLE: 0.1 s | 0.005 | 2 and 3 (Figure 15) | PFLE: 0.1 s | 1 × 10 |
| PFLE: 1 s | 0.003 | PFLE: 1 s | 2 × 10 | ||
| PFLE: 2 s | 0.003 | PFLE: 2 s | 4 × 10 | ||
| PFLE: 4 s | 0.005 | PFLE: 4 s | 1 × 10 | ||
| Voltage | Current | ||||
|---|---|---|---|---|---|
| Phases | Model:t | NRMSD | Phases | Model:t | NRMSD |
| 1 (Figure 16) | PFLE 0.1 s | 0.004 | 1 (Figure 17) | PFLE 0.1 s | 2 × 10 |
| PFLE 1 s | 0.003 | PFLE 1 s | 3 × 10 | ||
| PFLE 2 s | 0.003 | PFLE 2 s | 4 × 10 | ||
| PFLE 4 s | 0.005 | PFLE 4 s | 1 × 10 | ||
| 2 and 3 (Figure 16) | 2 | 0.005 | 2 and 3 (Figure 17) | PFLE 0.1 s | 2 × 10 |
| PFLE 1 s | 0.003 | PFLE 1 s | 1 × 10 | ||
| PFLE 2 s | 0.003 | PFLE 2 s | 2 × 10 | ||
| PFLE 4 s | 0.005 | PFLE 4 s | 3 × 10 | ||
| Voltage | Current | ||||
|---|---|---|---|---|---|
| Phases | Model:t | NRMSD | Phases | Model:t | NRMSD |
| 1 (Figure 18) | PFLE 0.1 s | 0.004 | 1 (Figure 19) | PFLE 0.1 s | 2 × 10 |
| PFLE 1 s | 0.003 | PFLE 1 s | 3 × 10 | ||
| PFLE 2 s | 0.003 | PFLE 2 s | 2 × 10 | ||
| PFLE 4 s | 0.005 | PFLE 4 s | 1 × 10 | ||
| 2 and 3 (Figure 18) | 2 | 0.005 | 2 and 3 (Figure 19) | PFLE 0.1 s | 42 × 10 |
| PFLE 1 s | 0.003 | PFLE 1 s | 1 × 10 | ||
| PFLE 2 s | 0.003 | PFLE 2 s | 2 × 10 | ||
| PFLE 4 s | 0.005 | PFLE 4 s | 4 × 10 | ||
| Voltage | Current | ||||
|---|---|---|---|---|---|
| Phases | Model | NRMSD | Phases | Model | NRMSD |
| 1 (Figure 22) | PFLE 0.1 s | 0.004 | 1 (Figure 23) | PFLE 0.1 s | 3 × 10 |
| PFLE 1 s | 0.003 | PFLE 1 s | 3 × 10 | ||
| PFLE 2 s | 0.003 | PFLE 2 s | 1 × 10 | ||
| PFLE 4 s | 0.005 | PFLE 4 s | 1 × 10 | ||
| 2 and 3 (Figure 22) | PFLE 0.1 s | 0.005 | 2 and 3 (Figure 23) | PFLE 0.1 s | 2 × 10 |
| PFLE 1 s | 0.003 | PFLE 1 s | 2 × 10 | ||
| PFLE 2 s | 0.003 | PFLE 2 s | 1 × 10 | ||
| PFLE 4 s | 0.005 | PFLE 4 s | 4 × 10 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leon Colqui, J.S.; Timaná, L.; Caballero, P.T.; Pissolato Filho, J.; Kurokawa, S. Implementation of an Alternative Frequency-Dependent Three-Phase Transmission Line Model Based on the Folded Line Equivalent Model in MatLab-Simulink. Energies 2022, 15, 9302. https://doi.org/10.3390/en15249302
Leon Colqui JS, Timaná L, Caballero PT, Pissolato Filho J, Kurokawa S. Implementation of an Alternative Frequency-Dependent Three-Phase Transmission Line Model Based on the Folded Line Equivalent Model in MatLab-Simulink. Energies. 2022; 15(24):9302. https://doi.org/10.3390/en15249302
Chicago/Turabian StyleLeon Colqui, Jaimis Sajid, Luis Timaná, Pablo Torrez Caballero, José Pissolato Filho, and Sérgio Kurokawa. 2022. "Implementation of an Alternative Frequency-Dependent Three-Phase Transmission Line Model Based on the Folded Line Equivalent Model in MatLab-Simulink" Energies 15, no. 24: 9302. https://doi.org/10.3390/en15249302
APA StyleLeon Colqui, J. S., Timaná, L., Caballero, P. T., Pissolato Filho, J., & Kurokawa, S. (2022). Implementation of an Alternative Frequency-Dependent Three-Phase Transmission Line Model Based on the Folded Line Equivalent Model in MatLab-Simulink. Energies, 15(24), 9302. https://doi.org/10.3390/en15249302