
WSPRT Methods for Improving Power System Automation Devices in the Conditions of Distributed Generation Sources Operation

 ,
,  ,
,  and
and
Abstract
:1. Introduction
2. An Overview of the Wald Sequential Probability Ratio Test Uses
- a significant increase in the time of electromechanical transients in active distribution networks due to small values of mechanical inertia constants of generating units (GUs) used at DG fuel facilities;
- the emergence of different operating regions due to a decrease in mutual resistance between electric motors in the load and GUs in active distribution networks;
- the use of high-performance fuel generators with smaller weight and size characteristics at DG facilities, which leads to their tripping by protection devices even in the case of short-term deviations of operating parameters (current, voltage, frequency) from the nominal values;
- the use of modern industrial process lines that are sensitive to the PQI deviation, which leads to their shutdown by process protection when the PQIs deviate from the nominal values;
- the use of automation devices in power systems with response time delays in the case of short-term deviations of operating parameters; for example, 0.15–0.3 s—for automatic frequency load shedding devices, 1–6 s—for automatic undervoltage protection devices.
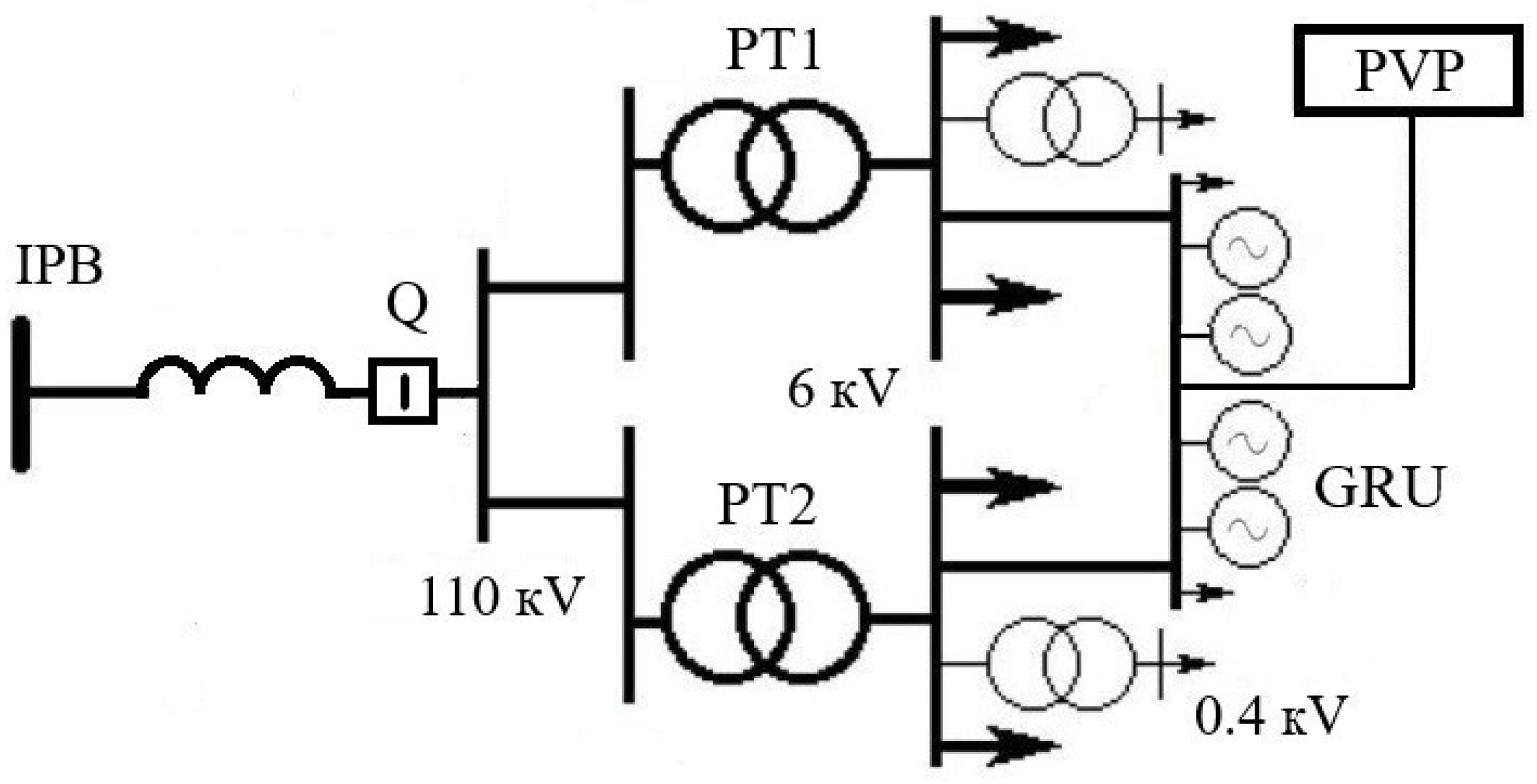
3. Simulation and Types of Calculations for the Formation of Operating Regions
- calculations of steady states for the normal and repair conditions of a portion of the distribution network with different load compositions;
- calculations of electromechanical transients for various disturbances in the portion of the distribution network.
- direct start-up of a large 2 MW IM on 6 kV busbar;
- shutdown of one of the four GUs at the DG facility;
- shutdown of two out of four GUs at the DG facility;
- shutdown of three out of four GUs at the DG facility.
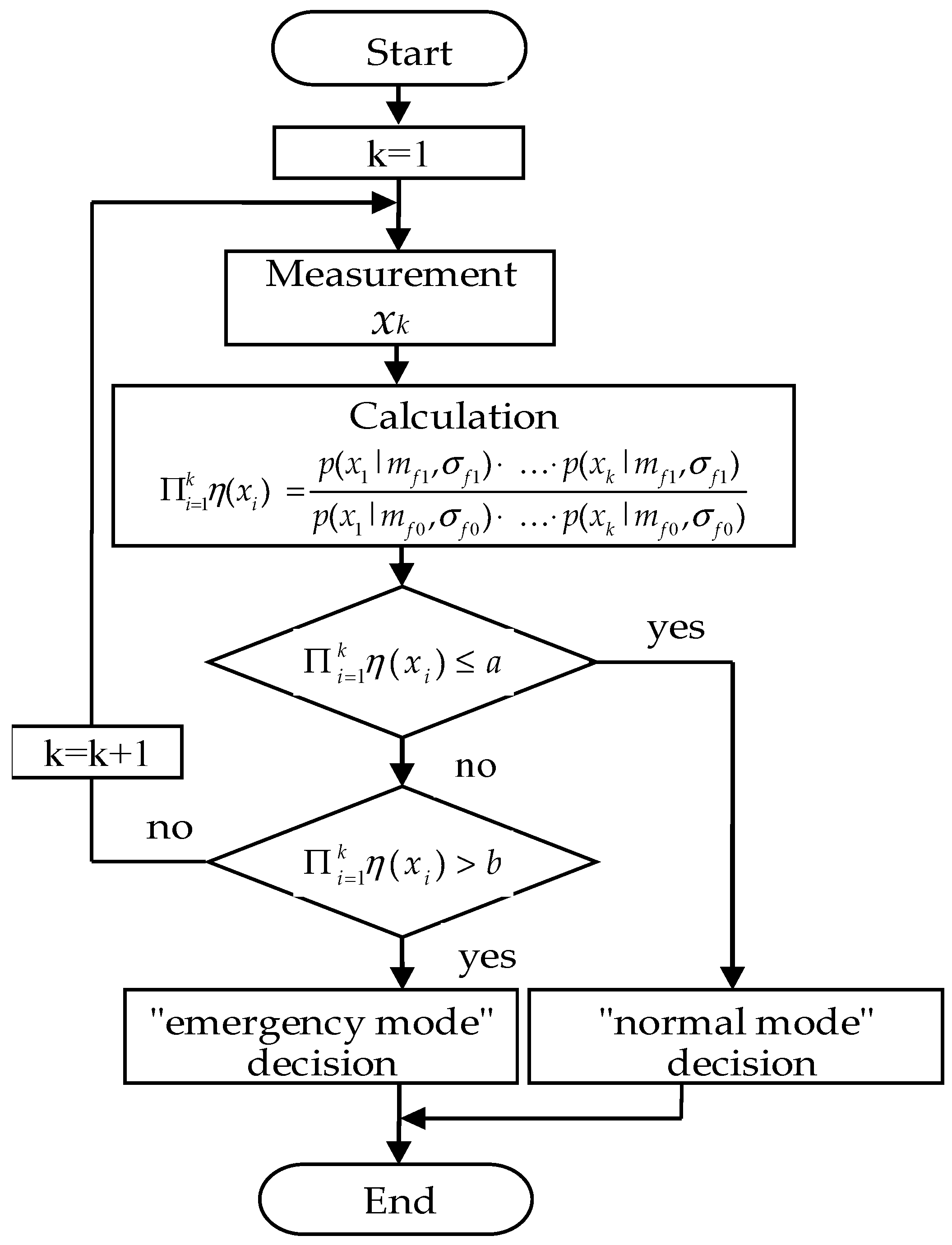
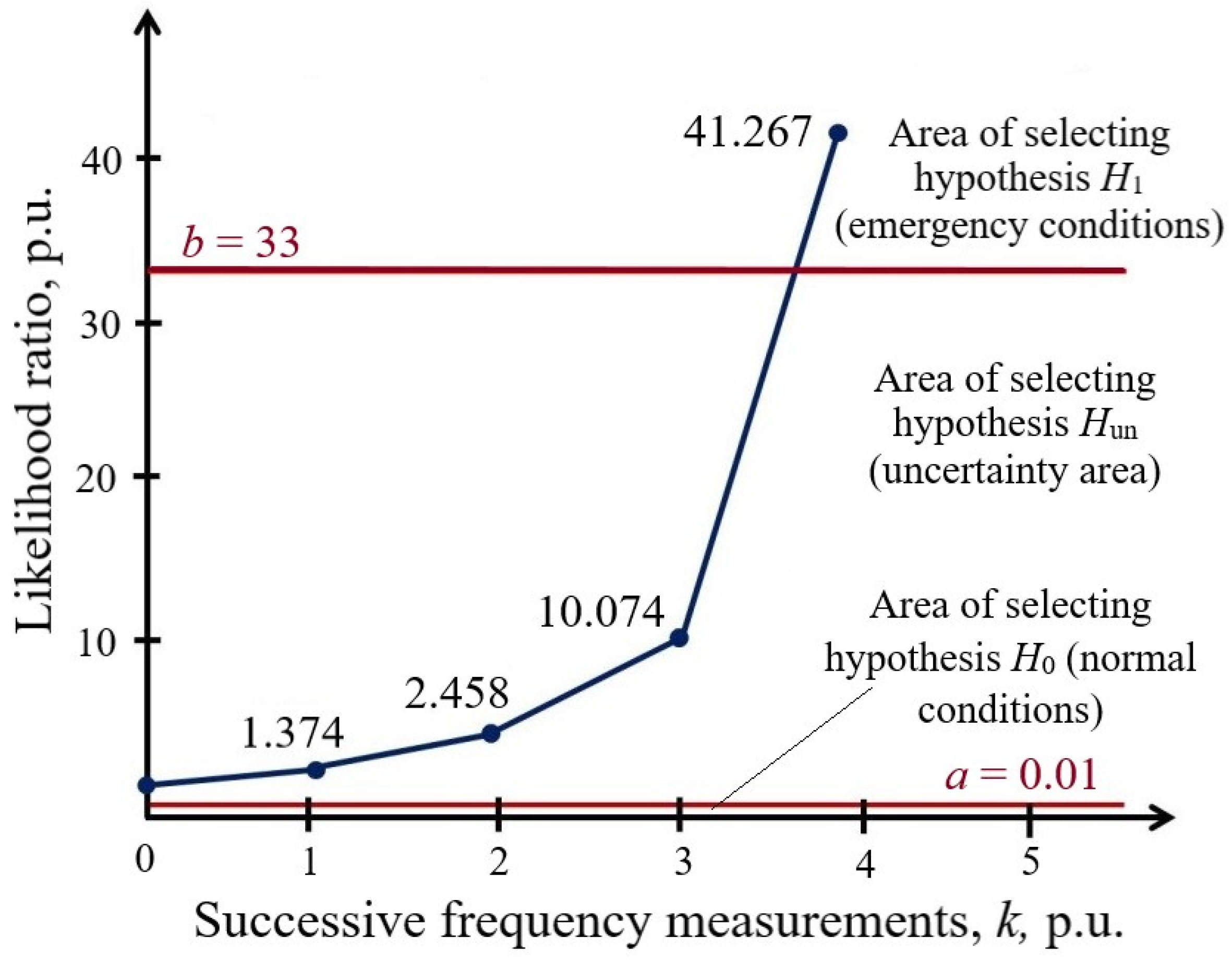
4. The Use of WSPRT in Automatic Frequency Load Shedding Devices
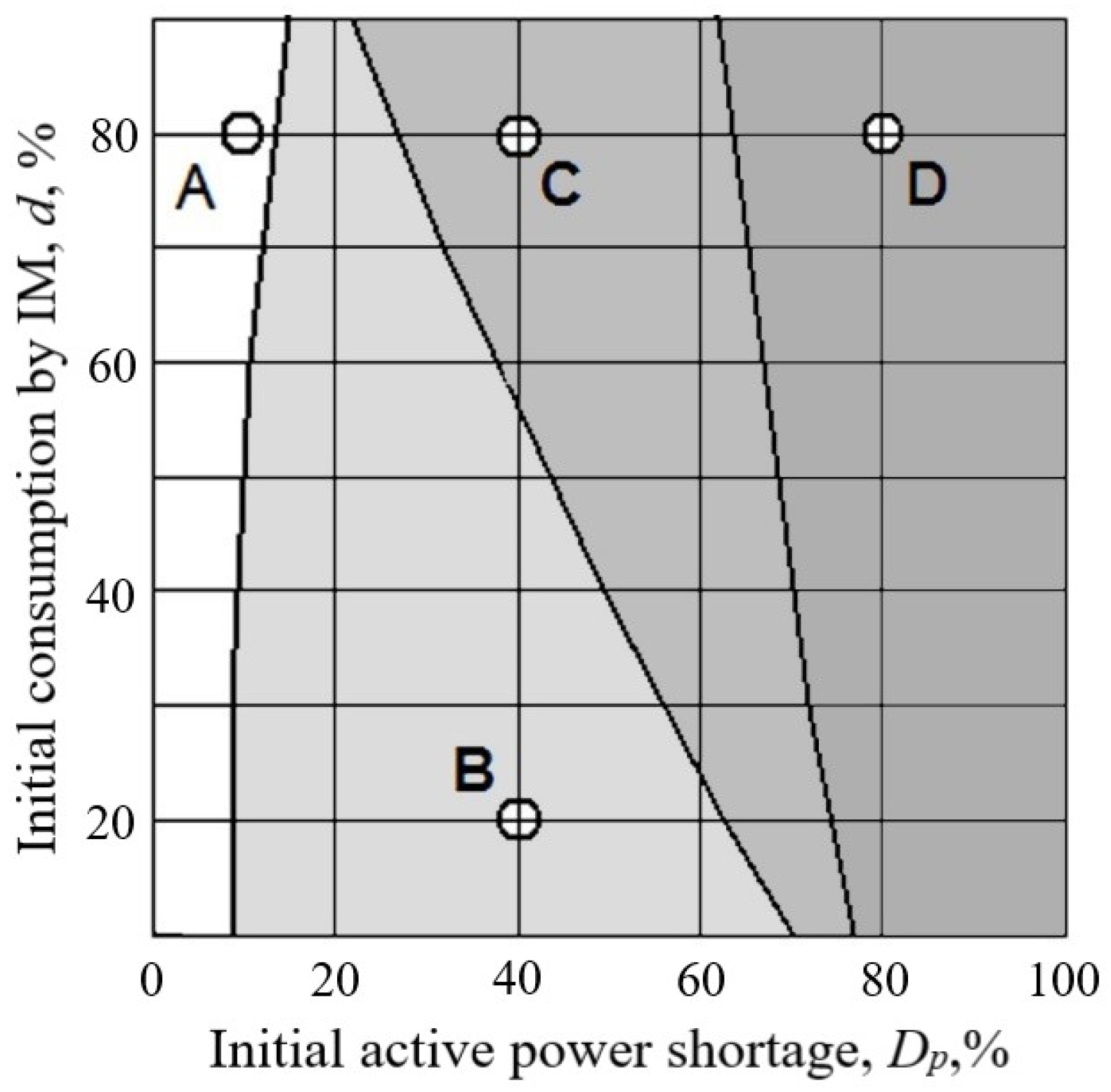
- H0—frequency corresponds to the normal operating conditions;
- H1—frequency corresponds to the emergency operating conditions;
- Hun—it is not possible to unambiguously determine whether the frequency belongs to emergency or normal operating conditions, frequency measurements are continued, and additional identification is performed based on the measurements.
5. The Use of WSPRT in Automatic Transformer Disconnect Switches
- distribution density function pH0(R|H0) on the interval [0; 0.6] and distribution density function pH1(R|H1) on the interval [0.5; 1.2];
- the error probability PM = 0.1 and the error probability PF = 0.01 (probability values are taken based on expert estimates).
- if Ri < 0.5, then Λ(Ri) = 0, and the hypothesis H0 is selected unambiguously (an increase in the load of the power transformer),
- if Ri > 0.6, then Λ(Ri) = ∞, and the hypothesis H1 is selected unambiguously (a reduction in the load of the power transformer).
6. The Use of WSPRT in Devices for Automatic Control of Power Quality Indices
7. Discussion of Results
- in AFLS devices, reliable identification of operating regions under large frequency measurement errors and PQI deviations from the standard values; and an increase in the speed of decision-making by eliminating the response delay to provide successful active power balancing in the distribution network;
- in ATD devices, the reliable identification of a load curve trend based on a minimum amount of initial information to make a decision to disconnect one of the two operating power transformers in order to reduce losses in distribution networks;
- in PQI control devices, an increase in the speed of the algorithm for making a decision on the generalized PQI deviation (up to three times), compared to the option of a fixed sample, to prevent shutdowns of process lines at industrial enterprises.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviation
| WSPRT | Wald sequential probability ratio test |
| DG | distributed generation |
| GU | generating unit |
| RES | renewable energy sources |
| AFLS | automatic frequency load shedding |
| GRU | gas-reciprocating units |
| PVP | photovoltaic power plant |
| IM | induction motor |
| ATDS | automatic transformer disconnects switches |
| SS | substation |
| PT | power transformer |
| IPB | infinite power buses |
| CT | current transformer |
| VT | voltage transformer |
| PQIs | power quality indices |
| H0 | hypothesis “normal mode” |
| H1 | hypothesis “emergency mode” |
| Hun | hypothesis “ I don’t know “ |
| likelihood ratio | |
| α | probability of wrong choice of hypothesis H0 |
| β | probability of wrong choice of hypothesis H1. |
| a (or A) and b (or B) | setpoints |
| Λ(R) | likelihood ratio |
| PM | given probability of wrong selection of hypothesis H0 |
| PF | given probability of wrong selection of hypothesis H1 |
| qj | the probability of a deviation of the power quality index mj from the normalized value based on expert estimate |
| generalized PQI | |
| a (m) | “acceptance” number |
| b (m) | “rejection” number |
References
- Dong, F.; Qin, C.; Zhang, X.; Zhao, X.; Pan, Y.; Gao, Y.; Zhu, J.; Li, Y. Towards carbon neutrality: The impact of renewable energy development on carbon emission efficiency. Int. J. Environ. Res. Public Health 2021, 18, 13284. [Google Scholar] [CrossRef]
- Zhang, H. Technology innovation, economic growth and carbon emissions in the context of carbon neutrality: Evidence from BRICS. Sustainability 2021, 13, 11138. [Google Scholar] [CrossRef]
- Lin, J.; Shen, Y.; Li, X.; Hasnaoui, A. BRICS carbon neutrality target: Measuring the impact of electricity production from renewable energy sources and globalization. J. Environ. Manag. 2021, 298, 113460. [Google Scholar]
- Burkov, A.F.; Van Kha, N.; Mikhanoshin, V.V. Energy losses in electrical networks. In Proceedings of the 7th International Conference on Industrial Engineering (ICIE), Sochi, Russia, 18–21 May 2021; pp. 384–393. [Google Scholar]
- Syranov, D.V.; Kovalnogov, V.N.; Zolotov, A.N. Modeling, research and optimization of heat losses during transport in energy systems. In Proceedings of the 2nd International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Chelyabinsk, Russia, 19–20 May 2016; p. 7911654. [Google Scholar]
- Henckens, M.L.C.M. The Energy Transition and Energy Equity: A Compatible Combination? Sustainability 2022, 14, 4781. [Google Scholar] [CrossRef]
- Xu, J.; Liu, T. Technological Paradigm-Based Approaches Towards Challenges and Policy Shifts for Sustainable Wind Energy Development. Energy Policy 2020, 142, 111538. [Google Scholar] [CrossRef]
- Senthil, R. Recent Innovations in Solar Energy Education and Research Towards Sustainable Energy Development. Acta Innov. 2022, 42, 27–49. [Google Scholar] [CrossRef]
- Praiselin, W.J.; Edward, J.B. A review on impacts of power quality, control and optimization strategies of integration of renewable energy based microgrid operation. Int. J. Intell. Syst. Appl. 2018, 10, 67–81. [Google Scholar] [CrossRef] [Green Version]
- Ilyushin, P.; Kulikov, A.; Suslov, K.; Filippov, S. Consideration of Distinguishing Design Features of Gas-Turbine and Gas-Reciprocating Units in Design of Emergency Control Systems. Machines 2021, 9, 47. [Google Scholar] [CrossRef]
- Zakharov, A. ORC Plants Application for Secondary Energy Resources Recycling in Oil and Gas Sector Enterprises. In Proceedings of the World Petroleum Congress Proceedings. Cep. “21st World Petroleum Congress 2014: Responsibly Energizing a Growing World, WPC 2014”, Moscow, Russia, 15–19 June 2014; pp. 4197–4207. [Google Scholar]
- Abashidze, A.K.; Solntsev, A.M.; Akshalova, R.D. Climate Change Mitigation and Renewable Energy Sources: International Legal Issues. Lect. Notes Netw. Syst. 2020, 129, 1068–1075. [Google Scholar]
- Balouji, E.; Salor, O. Classification of Power Quality Events Using Deep Learning on Event Images. In Proceedings of the 3rd International Conference on Pattern Recognition and Image Analysis (IPRIA), Shahrekord, Iran, 19–20 April 2017. [Google Scholar] [CrossRef]
- Bagheri, A.; Bollen, M.H.J.; Gu, I.Y.H. Improved characterization of multistage voltage dips based on the space phasor model. Electr. Power Syst. Res. 2018, 154, 319–328. [Google Scholar] [CrossRef]
- Willis, K.G.; Garrod, G.D. Electricity Supply Reliability—Estimating the Value of Lost Load. Energy Policy 1997, 25, 97–103. [Google Scholar] [CrossRef]
- Khismatullin, A.S.; Bashirov, M.G. Methods of Improving the Power Supply Reliability of Industrial Site. In IOP Conference Series: Materials Science and Engineering, Proceedings of the III International Scientific Conference: Modernization, Innovations, Progress: Advanced Technologies in Material Science, Mechanical and Automation Engineering (MIP-III 2021), Krasnoyarsk, Russia, 29–30 April 2021; IOP Publishing Ltd: Wales, UK, 2021; Volume 1155, p. 012067. [Google Scholar]
- Ilyushin, P.V.; Pazderin, A.V. Approaches to organization of emergency control at isolated operation of energy areas with distributed generation. In Proceedings of the International Ural Conference on Green Energy, Chelyabinsk, Russia, 4–6 October 2018. [Google Scholar] [CrossRef]
- Gnatyuk, V.I.; Kivchun, O.R.; Lutsenko, D.V. Digital platform for management of the regional power grid consumption. In Proceedings of the IOP Conference Series: Earth and Environmental Science. Cep. «Germany and Russia: Ecosystems Without Borders», Kaliningrad, Russia, 5–10 October 2020; p. 689. [Google Scholar]
- Ilyushin, P.V. Emergency and post-emergency control in the formation of micro-grids. In Proceedings of the Methodological Problems in Reliability Study of Large Energy Systems (RSES), E3S Web of Conferences, Bishkek, Kyrgyzstan, 11–15 September 2017; Volume 25, p. 2002. [Google Scholar]
- Ilyushin, P.V.; Pazderin, A.V. Requirements for power stations islanding automation an influence of power grid parameters and loads. In Proceedings of the 2018 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Moscow, Russia, 15–18 May 2018. [Google Scholar]
- Wald, A. Sequential Analysis; John Wiley & Sons, Inc.: New York, NY, USA, 1947; p. 224. [Google Scholar]
- Orlov, A.I. Theory of Decision–Making: Textbook; Publishing House: "Science of Russia": Moscow, Russia, 2004; p. 656. (In Russian) [Google Scholar]
- Labsker, L.G. Geometric solution of the problem of synthesis by the Wald–Savage criterion and application to the optimal choice of the technological method of production. Fundam. Res. 2020, 5, 112–116. (In Russian) [Google Scholar]
- Grigoriev, M.A.; Reifeld, M.A. Detection of a seismically active object in the field of the placement of a security system using a sequential Wald criterion. Autometry 2016, 52, 53–61. (In Russian) [Google Scholar]
- Illarionov, B.V.; Karavaev, M.A.; Maleev, D.S. Comparative analysis of signal search procedures under conditions of a priori uncertainty of their parameters according to the Neumann-Pearson and Wald criteria. Aerosp. Forces. Theory Pract. 2021, 19, 243–254. (In Russian) [Google Scholar]
- Caesarendra, W.; Tjahjowidodo, T.; Kosasih, B.; Tieu, A.K. Integrated Condition Monitoring and Prognosis Method for Incipient Defect Detection and Remaining Life Prediction of Low Speed Slew Bearings. Machines 2017, 5, 11. [Google Scholar] [CrossRef] [Green Version]
- Gorbatkov, S.A.; Biryukov, A.N.; Kasimova, L.I. Multistage method of analysis and management adequacy of the neural network model of bankruptcy forecasting based on the consistent Wald principle. Online J. Sci. Stud. 2015, 7, 1–14. (In Russian) [Google Scholar]
- Gorsky, M.A. Choosing an investor’s portfolio using the Wald-Savage criterion. In General Question of World Science. Collection of Scientific Papers on Materials VIII International Scientific Conference; Publishing House: "Science of Russia": Moscow, Russia, 2019; pp. 62–70. (In Russian) [Google Scholar]
- Labsker, L.G.; Yaschenko, N.A.; Amelina, A.V. Formation of the priority order of lending by the bank to corporate borrowers according to the synthetic Wald-Savage criterion. Financ. Credit. 2012, 38, 31–41. (In Russian) [Google Scholar]
- Altman, D.G.; Machin, D.; Bryant, T.N.; Gardner, M.J. Statistics with Confidence, 2nd ed.; BMJ Books: London, UK, 2000; p. 254. [Google Scholar]
- Griner, P.F.; Mayewski, R.J.; Mushlin, A.I.; Greenland, P. Selection and interpretation of diagnostic tests and procedures. Ann. Intern. Med. 1981, 94, 555–600. [Google Scholar]
- Korneenkov, A.A.; Lilenko, S.V.; Lilenko, A.S.; Vyazemskaya, E.E.; Bakhilin, V.M. Using a modified procedure for sequential recognition of Wald to determine the outcome of surgical treatment in patients with Meniere’s disease. Russ. Otorhinolaryngol. 2018, 3, 4–59. (In Russian) [Google Scholar]
- Sagadeeva, E.F.; Filippova, K.O. Application of the Wald criterion in agriculture. In Collection of Scientific Articles of Bashkir State Agrarian University; Publishing House LLC "Polygraph Design": Ufa, Russia, 2018; pp. 58–59. (In Russian) [Google Scholar]
- Díaz-Padilla, G.; López-Arroyo, J.; Guajardo-Panes, R. Spatial Distribution and Development of Sequential Sampling Plans for Diaphorina citri Kuwayama (Hemiptera: Liviidae). Agronomy 2021, 11, 1434. [Google Scholar] [CrossRef]
- Sakaguchi, T. A statistical decision theoretic approach to digital relaying. IEEE Trans. Power Appar. Syst. 1980, PAS-99, 1918–1926. [Google Scholar] [CrossRef]
- Li, X.R.; Wang, L. Fault detection using sequential probability ratio test. In Proceedings of the IEEE Power Engineering Society. 1999 Winter Meeting (Cat. No.99CH36233), New York, NY, USA, 31 January–4 February 1999. [Google Scholar] [CrossRef]
- Girgis, A.A. A New Kalman Filtering Based Digital Distance Relay. IEEE Trans. Power Appar. Syst. 1982, PAS-101, 3471–3480. [Google Scholar] [CrossRef]
- Rebizant, W.; Szafran, J. Power system fault detection and classification using probabilistic approach. Eur. Trans. Electr. Power 1999, 9, 183–191. [Google Scholar] [CrossRef]
- Davarifar, M.; Rabhi, A.; Hajjaji, A.; Daneshifar, Z. Real-time diagnosis of PV system by using the Sequential Probability Ratio Test (SPRT). In Proceedings of the IEEE Trans on PEMC, Antalya, Turkey, 21–24 September 2014; pp. 508–513. [Google Scholar]
- Sohn, H.; Allen, D.W.; Worden, K.; Farrar, C.R. Statistical damage classification using sequential probability ratio tests. Struct. Health Monit. 2003, 2, 57–74. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, M.R.; Stoumbos, Z.G. The SPRT chart for monitoring a proportion. IIE Trans. 1998, 30, 545–561. [Google Scholar] [CrossRef]
- Lee, D.H.; Chang, I.H.; Pham, H. Software Reliability Model with Dependent Failures and SPRT. Mathematics 2020, 8, 1366. [Google Scholar] [CrossRef]
- Ilyushin, P.V.; Filippov, S.P. Under-frequency load shedding strategies for power districts with distributed generation. In Proceedings of the 2019 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 25–29 March 2019. [Google Scholar] [CrossRef]
- Ilyushin, P.V.; Kulikov, A.L.; Loskutov, A.A. Application of the Wald Sequential Procedure in Automatic Network Control with Distributed Generation. Adv. Intell. Syst. Comput. 2020, 1295, 104–120. [Google Scholar] [CrossRef]
- Kulikov, A.L.; Ilyushin, P.V.; Loskutov, A.A. High-Performance Sequential Analysis in Grid Automated Systems of Distributed-Generation Areas. Russ. Electr. Eng. 2021, 92, 90–96. [Google Scholar] [CrossRef]
- Kulikov, A.L.; Ilyushin, P.V.; Loskutov, A.A.; Sevostyanov, A.A. The Wald Sequential Analysis Procedure as a Means of Guaranteeing a High Automatic Under-Frequency Load-Shedding Response Rate at Deviations of Unified Power Quality Indices. Power Technol. Eng. 2021, 55, 467–475. [Google Scholar] [CrossRef]
- Kulikov, A.L.; Sharygin, M.V.; Voroshilov, A.A. A method for recognizing the trend of the load graph in the automatic shutdown of power transformers. Electricity 2018, 10, 20–29. (In Russian) [Google Scholar]
- Kulikov, A.L.; Sharygin, M.V.; Voroshilov, A.A. Method of Reducing Technical Losses of Electric Power in Transformer Groups by Means of Automatic Switching-Off of Transformers. In Proceedings of the 2018 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Moscow, Russia, 15–18 May 2018. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory, Part I: Detection, Estimation, and Linear Modulation Theory; John Wiley & Sons, Inc: Hobokone, NJ, USA, 2001; p. 697. [Google Scholar]
- Rylov, A.V.; Ilyushin, P.V.; Kulikov, A.L.; Suslov, K.V. Testing Photovoltaic Power Plants for Participation in General Primary Frequency Control under Various Topology and Operating Conditions. Energies 2021, 14, 5179. [Google Scholar] [CrossRef]
- Suslov, K.; Shushpanov, I.; Buryanina, N.; Ilyushin, P. Flexible power distribution networks: New opportunities and applications. In Proceedings of the 9th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS), Prague, Czech Republic, 2–4 May 2020; pp. 57–64. [Google Scholar] [CrossRef]
- ISO 39511:2018; Sequential Sampling Plans for Inspection by Variables for Percent Nonconforming (Known Standard Deviation). International Organization for Standardization: Geneva, Switzerland, 2018.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Application Area | Characteristics of the Tasks to Be Solved | Reference |
|---|---|---|---|
| 1 | Manufacturing, industrial systems | Input control of incoming materials, analysis of technological processes, technical diagnostics of equipment, output control of manufactured products | [23,24,25,26] |
| 2 | Finance | Forecasting the bankruptcy of borrowers in the banking sector, forming a portfolio of investors, determining the priority of lending to corporate borrowers | [27,28,29] |
| 3 | Medicine | Image recognition, selection and interpretation of diagnostic tests and procedures, determining the outcome of surgical treatment in patients with various diseases | [30,31,32] |
| 4 | Agriculture | Determining yields under conditions of uncertainty of natural and climatic conditions (rain, drought, hail, etc.) | [33,34] |
| 5 | Power industry | Diagnostics of electrical equipment, determination of the location of damage, classification of accidents in power systems, and regime automation | [35,36,37,38,39,40,41] |
| 6 | Software | Determining the reliability and quality of software | [42] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kulikov, A.; Ilyushin, P.; Loskutov, A.; Suslov, K.; Filippov, S. WSPRT Methods for Improving Power System Automation Devices in the Conditions of Distributed Generation Sources Operation. Energies 2022, 15, 8448. https://doi.org/10.3390/en15228448
Kulikov A, Ilyushin P, Loskutov A, Suslov K, Filippov S. WSPRT Methods for Improving Power System Automation Devices in the Conditions of Distributed Generation Sources Operation. Energies. 2022; 15(22):8448. https://doi.org/10.3390/en15228448
Chicago/Turabian StyleKulikov, Aleksandr, Pavel Ilyushin, Anton Loskutov, Konstantin Suslov, and Sergey Filippov. 2022. "WSPRT Methods for Improving Power System Automation Devices in the Conditions of Distributed Generation Sources Operation" Energies 15, no. 22: 8448. https://doi.org/10.3390/en15228448