Battery Storage Integration in Voltage Unbalance and Overvoltage Mitigation Control Strategies and Its Impact on the Power Quality

 , , and
, , and 
Abstract
:1. Introduction
2. Control Strategies Description
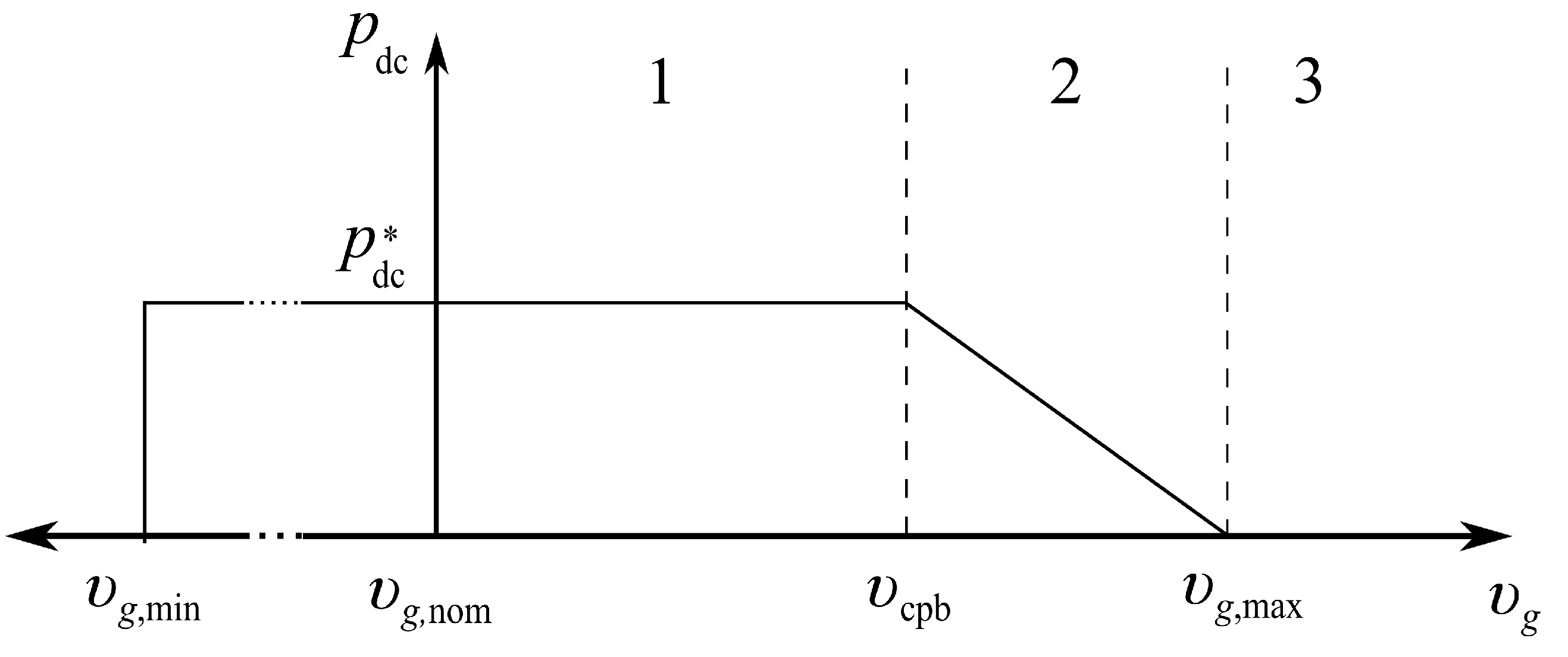
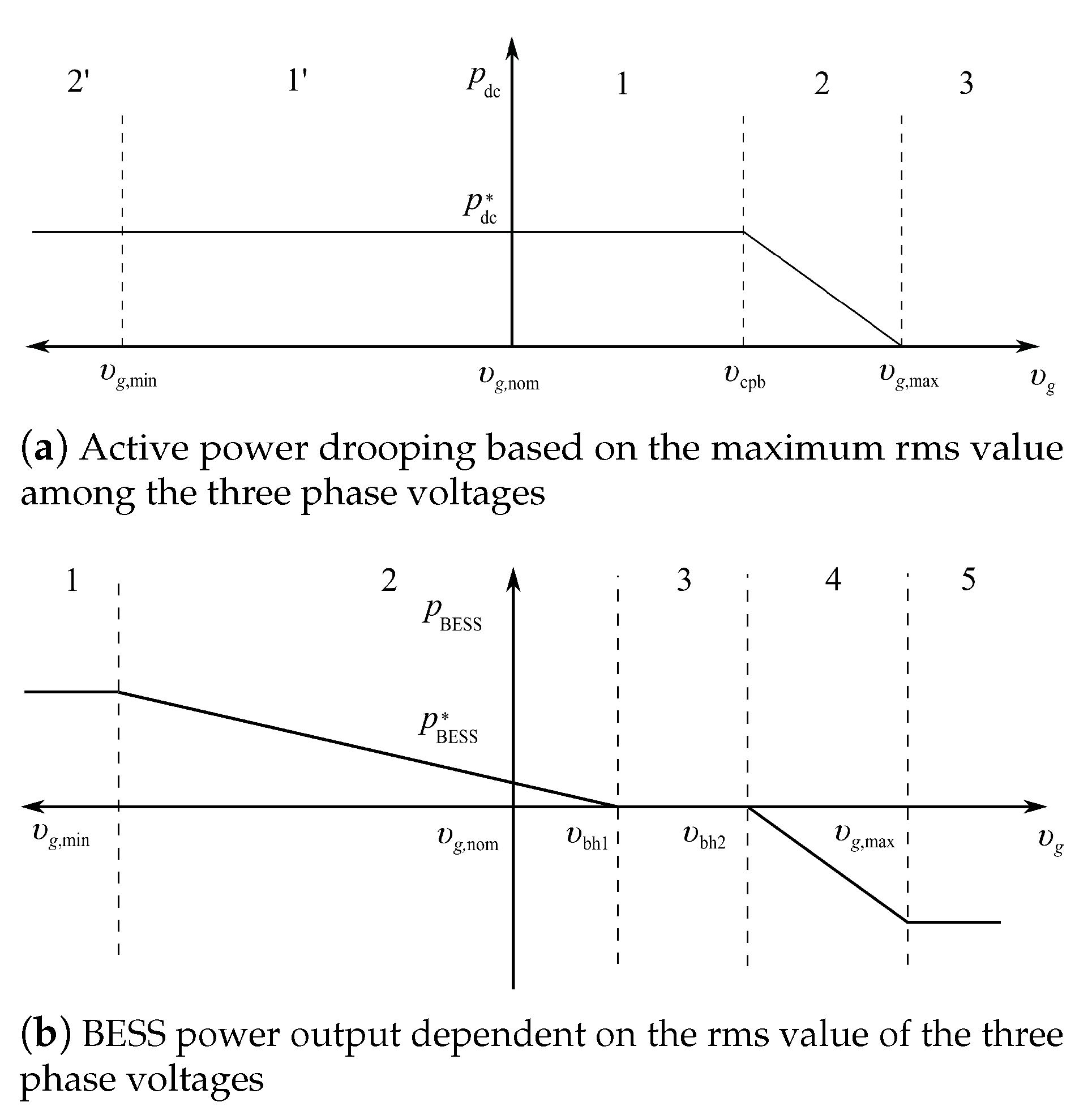
2.1. Active Power Drooping
2.2. Controller for the Battery Energy Storage System
2.3. Positive-Sequence Control Strategy
2.4. Three-Phase Damping Control Strategy
3. Simulation Results
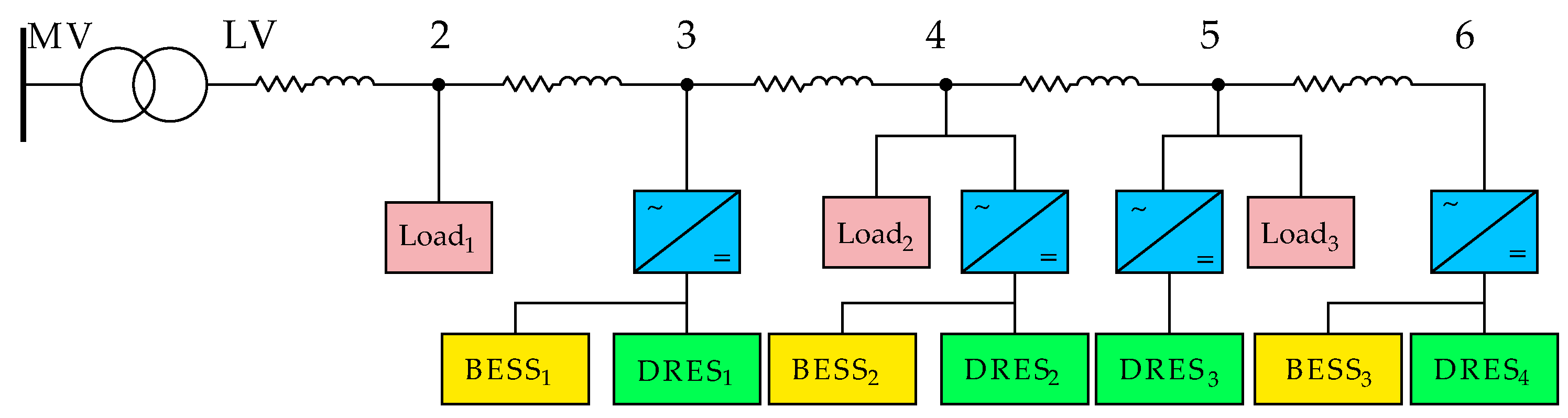
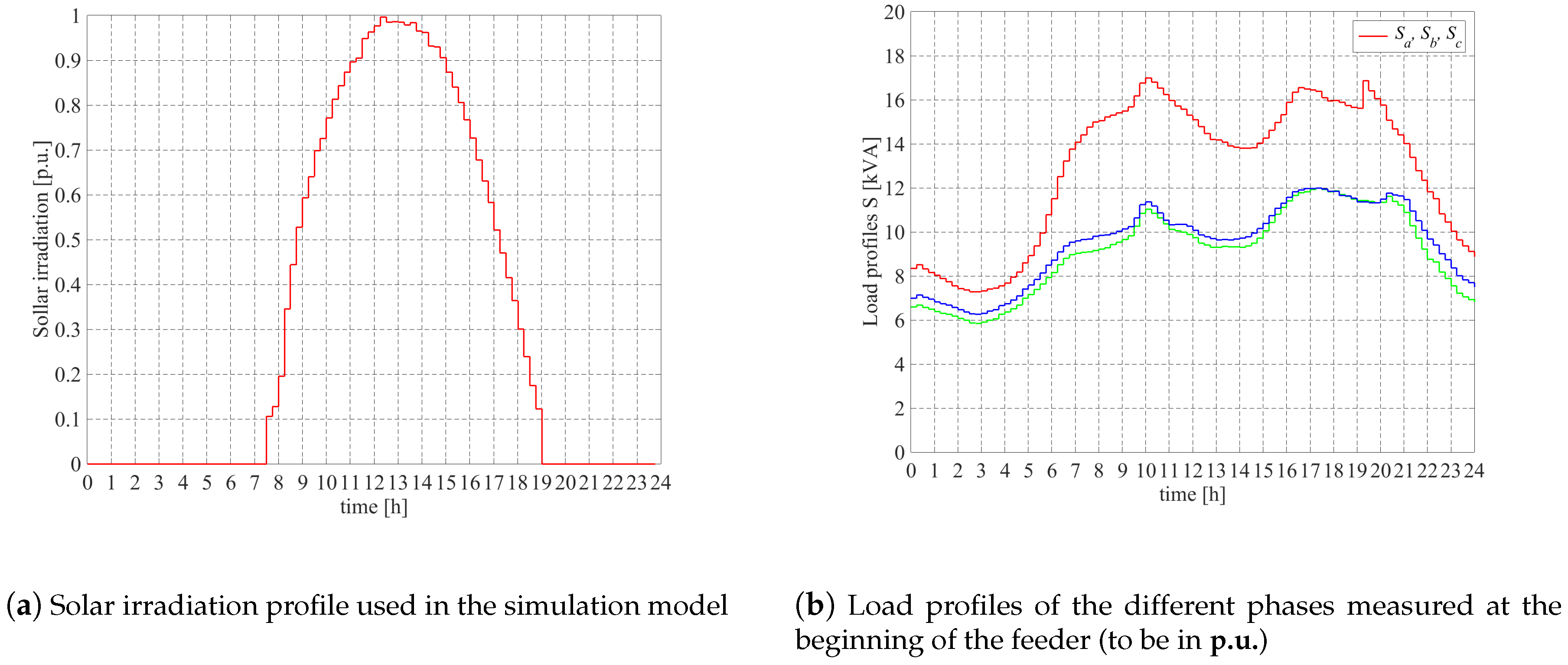
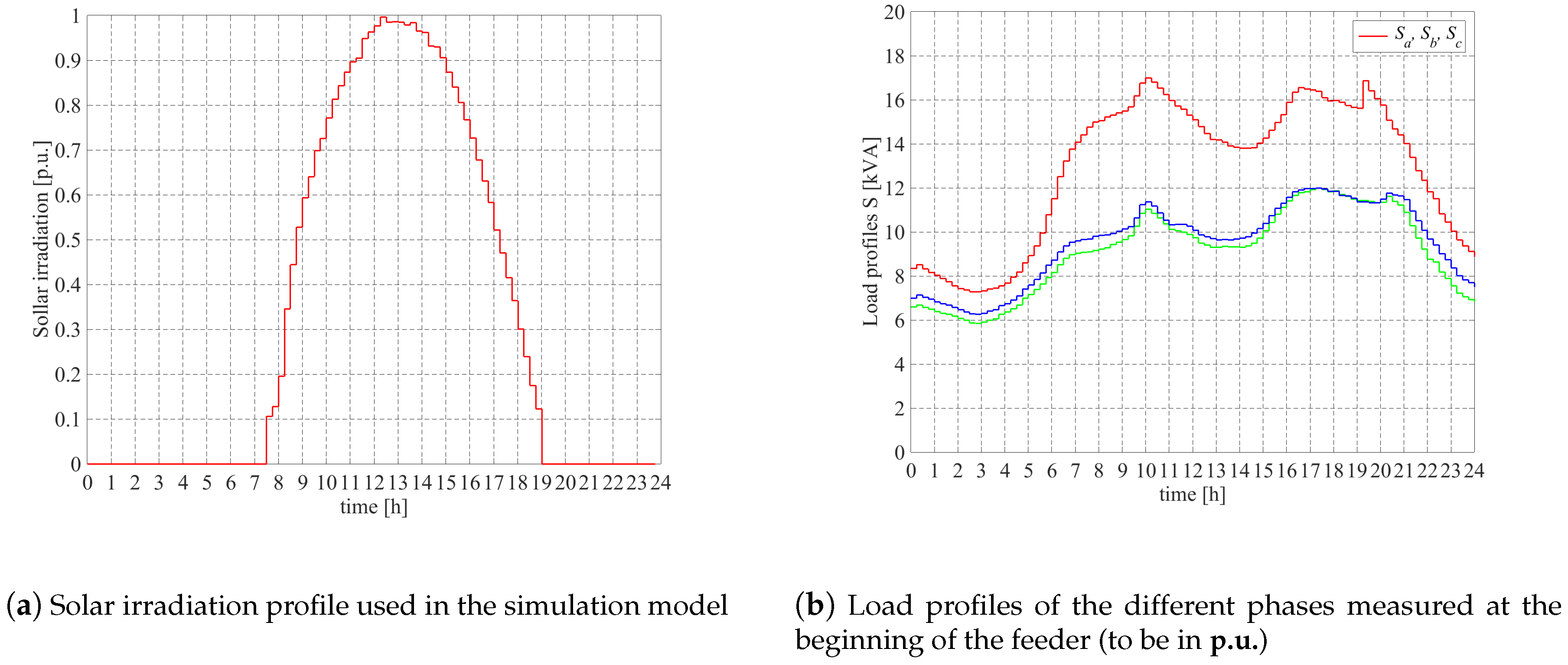
3.1. Model Description
3.1.1. Grid Data
3.1.2. DRES, BESS and Load Data
3.1.3. Short Description of the Simulink Model
3.1.4. Integration of BESS into DRES
3.2. Simulation Results
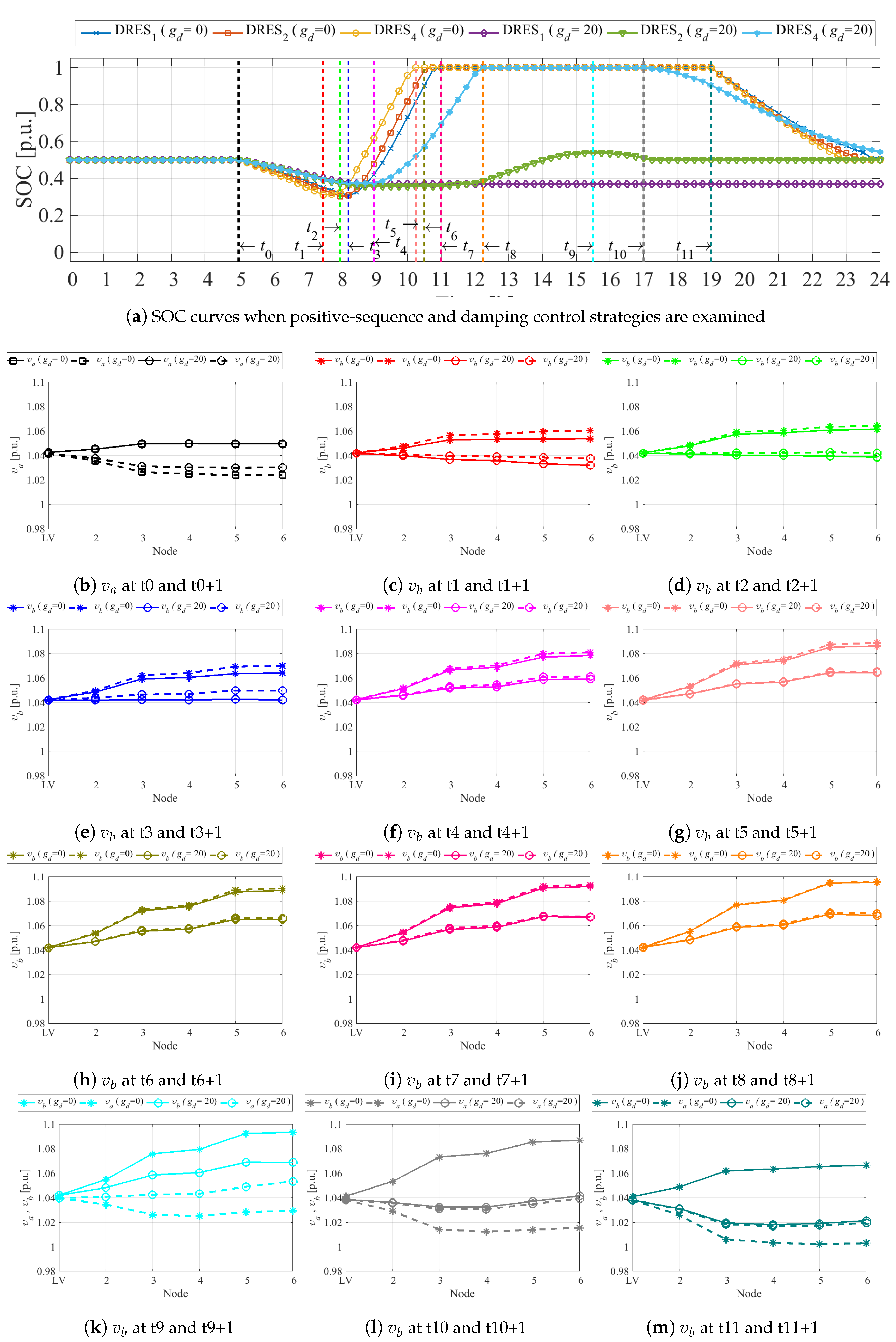
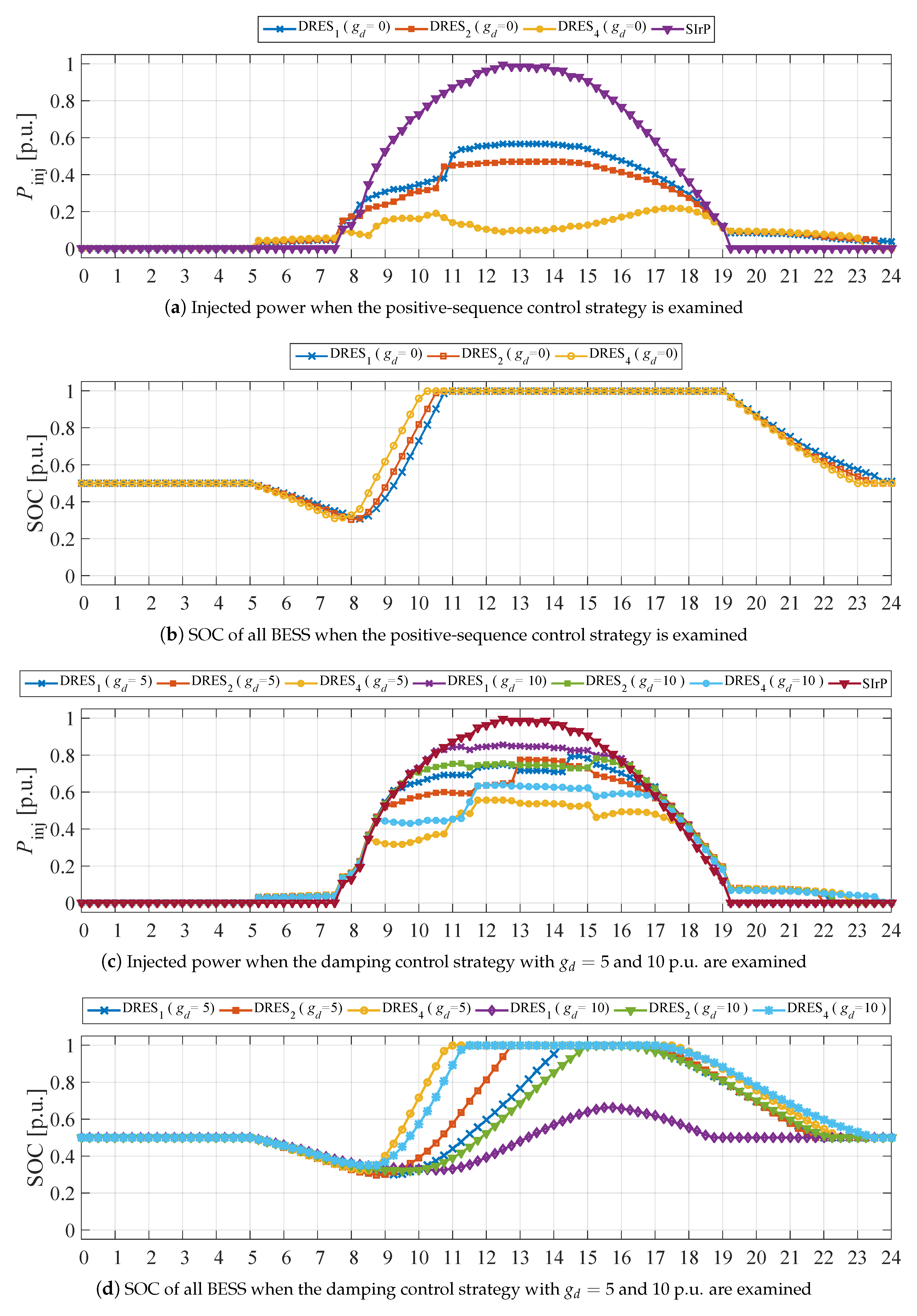
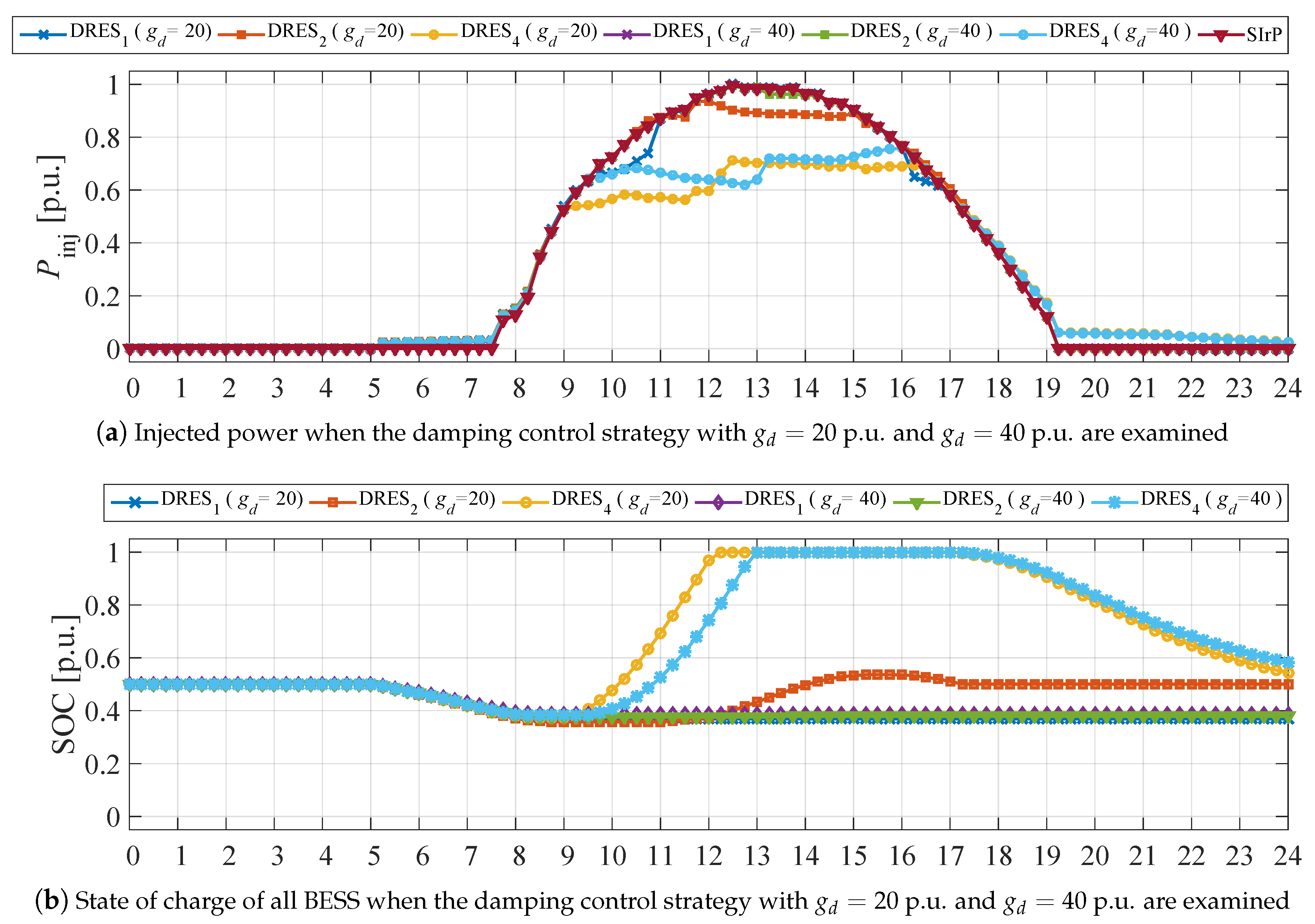
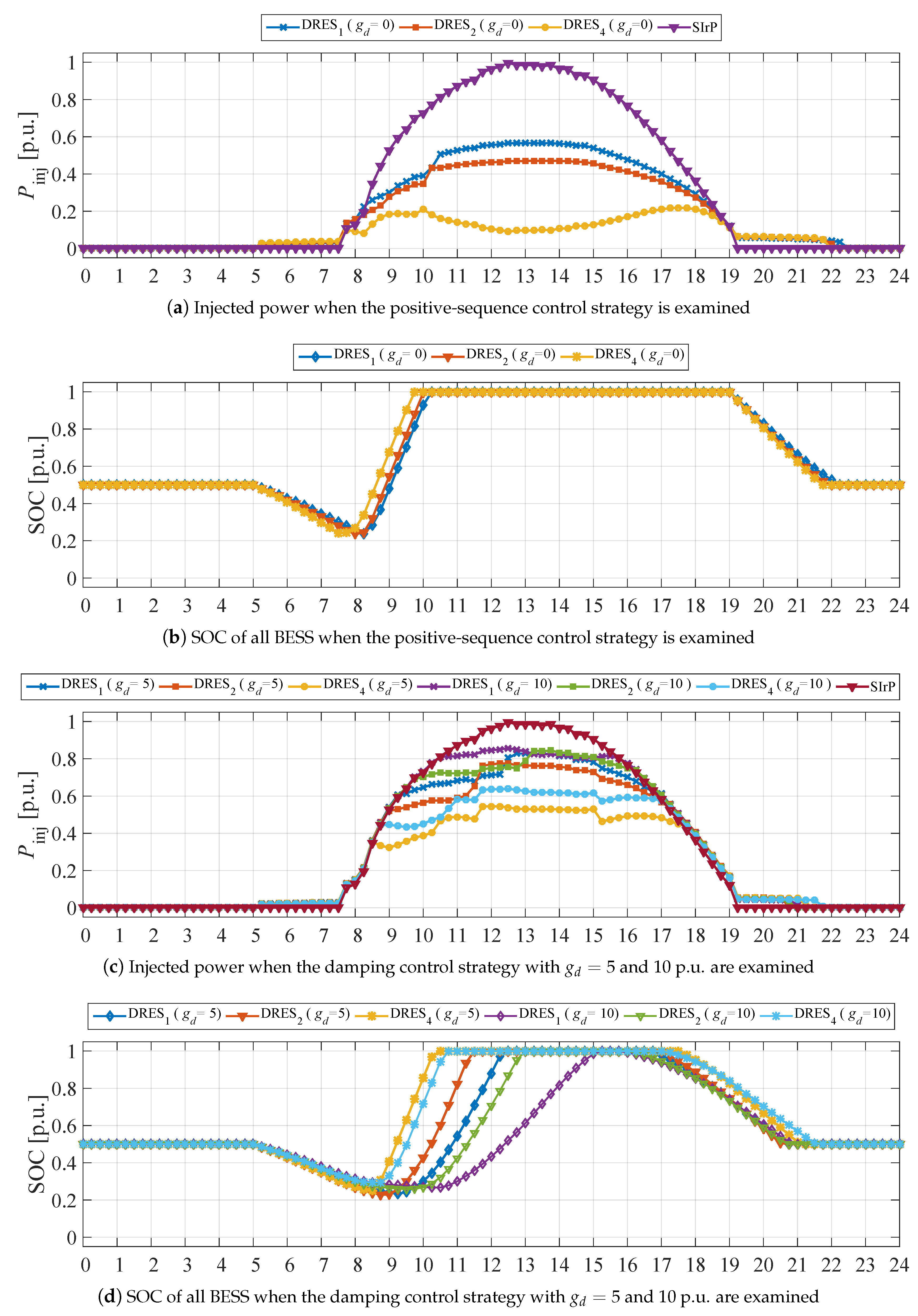
3.2.1. BESS Controller Operating Principle
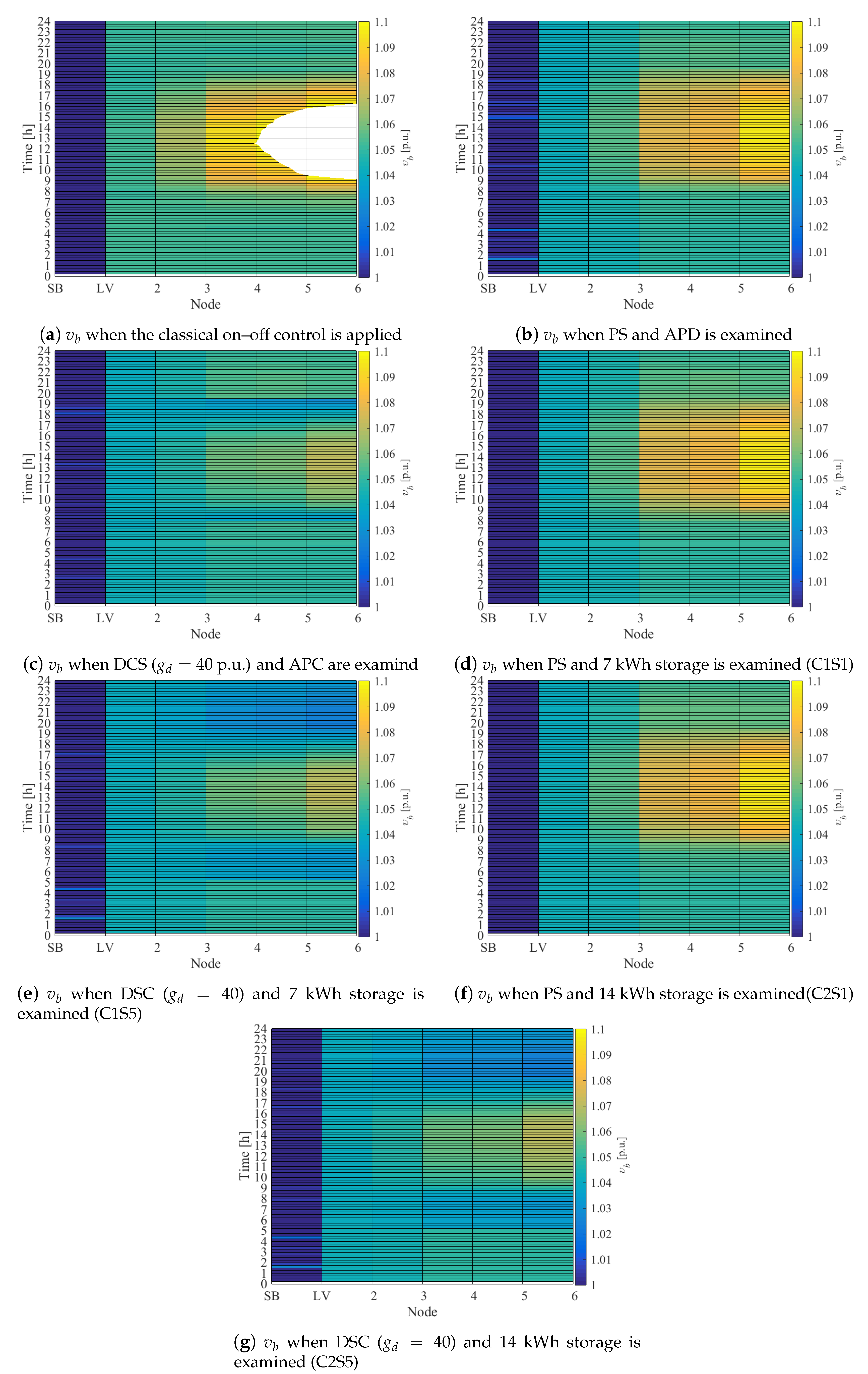
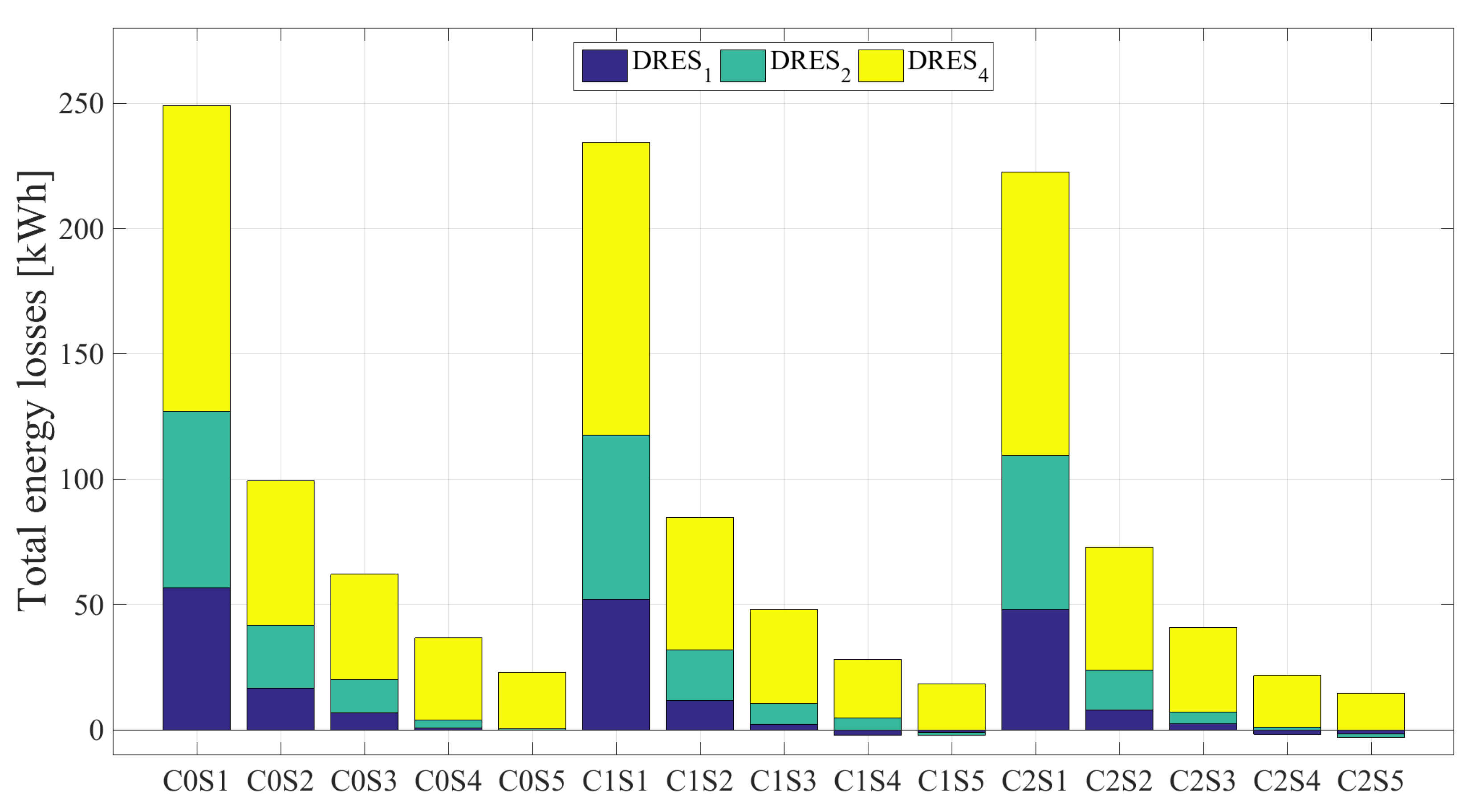
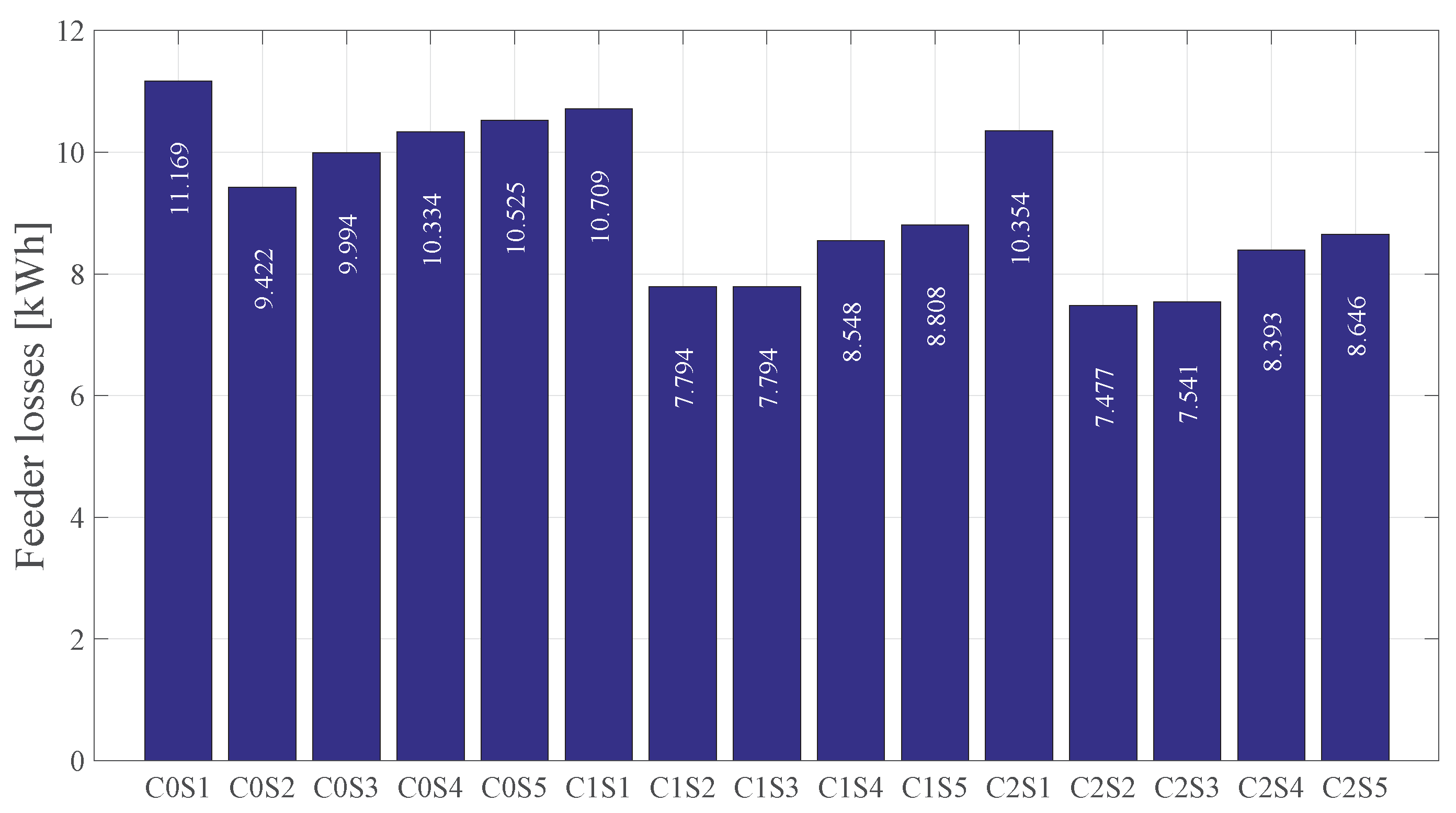
3.2.2. Performance Assessment of the Different Cases and Sub-Cases
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zsiborács, H.; Hegedűsné Baranyai, N.; Vincze, A.; Háber, I.; Pintér, G. Economic and Technical Aspects of Flexible Storage Photovoltaic Systems in Europe. Energies 2018, 11, 1445. [Google Scholar] [CrossRef]
- Weckx, S.; Driesen, J. Load Balancing With EV Chargers and PV Inverters in Unbalanced Distribution Grids. IEEE Trans. Sustain. Energy 2015, 6, 635–643. [Google Scholar] [CrossRef]
- Tolabi, H.B.; Ali, M.H.; Rizwan, M. Simultaneous Reconfiguration, Optimal Placement of DSTATCOM, and Photovoltaic Array in a Distribution System Based on Fuzzy-ACO Approach. IEEE Trans. Sustain. Energy 2015, 6, 210–218. [Google Scholar] [CrossRef]
- Behrouzian, E.; Bongiorno, M.; Teodorescu, R. Impact of Switching Harmonics on Capacitor Cells Balancing in Phase-Shifted PWM-Based Cascaded H-Bridge STATCOM. IEEE Trans. Power Electron. 2017, 32, 815–824. [Google Scholar] [CrossRef]
- Chaudhary, P.; Rizwan, M. Voltage regulation mitigation techniques in distribution system with high PV penetration: A review. Renew. Sustain. Energy Rev. 2018, 82, 3279–3287. [Google Scholar] [CrossRef]
- Bozalakov, D.; Laveyne, J.; Desmet, J.; Vandevelde, L. Overvoltage and voltage unbalance mitigation in areas with high penetration of renewable energy resources by using the modified three-phase damping control strategy. Electr. Power Syst. Res. 2019, 168, 283–294. [Google Scholar] [CrossRef]
- Shaw-Williams, D.; Susilawati, C.; Walker, G. Value of Residential Investment in Photovoltaics and Batteries in Networks: A Techno-Economic Analysis. Energies 2018, 11, 1022. [Google Scholar] [CrossRef]
- Yang, Y.; Li, H.; Aichhorn, A.; Zheng, J.; Greenleaf, M. Sizing Strategy of Distributed Battery Storage System with High Penetration of Photovoltaic for Voltage Regulation and Peak Load Shaving. IEEE Trans. Smart Grid 2014, 5, 982–991. [Google Scholar] [CrossRef]
- Hilton, G.; Cruden, A.; Kent, J. Comparative analysis of domestic and feeder connected batteries for low voltage networks with high photovoltaic penetration. J. Energy Storage 2017, 13, 334–343. [Google Scholar] [CrossRef]
- Chua, K.H.; Lim, Y.S.; Taylor, P.; Morris, S.; Wong, J. Energy Storage System for Mitigating Voltage Unbalance on Low-Voltage Networks with Photovoltaic Systems. IEEE Trans. Power Deliv. 2012, 27, 1783–1790. [Google Scholar] [CrossRef]
- Faessler, B.; Schuler, M.; Preißinger, M.; Kepplinger, P. Battery Storage Systems as Grid-Balancing Measure in Low-Voltage Distribution Grids with Distributed Generation. Energies 2017, 10, 2161. [Google Scholar] [CrossRef]
- Hesse, H.C.; Martins, R.; Musilek, P.; Naumann, M.; Truong, C.N.; Jossen, A. Economic Optimization of Component Sizing for Residential Battery Storage Systems. Energies 2017, 10, 835. [Google Scholar] [CrossRef]
- Zangs, M.J.; Adams, P.B.E.; Yunusov, T.; Holderbaum, W.; Potter, B.A. Distributed Energy Storage Control for Dynamic Load Impact Mitigation. Energies 2016, 9, 647. [Google Scholar] [CrossRef]
- Idlbi, B.; von Appen, J.; Kneiske, T.; Braun, M. Cost-Benefit Analysis of Battery Storage System for Voltage Compliance in Distribution Grids with High Distributed Generation. Energy Procedia 2016, 99, 215–228. [Google Scholar] [CrossRef]
- Rodrigues, S.; Torabi, R.; Ramos, H.G.; Morgado-Dias, F. Powerwall 2.0 economic feasibility in Australia. In Proceedings of the 2017 International Conference in Energy and Sustainability in Small Developing Economies (ES2DE), Funchal, Madeira Island, 10–13 July 2017. [Google Scholar]
- Zeh, A.; Witzmann, R. Operational Strategies for Battery Storage Systems in Low-voltage Distribution Grids to Limit the Feed-in Power of Roof-mounted Solar Power Systems. Energy Procedia 2014, 46, 114–123. [Google Scholar] [CrossRef]
- Nguyen, S.; Peng, W.; Sokolowski, P.; Alahakoon, D.; Yu, X. Optimizing rooftop photovoltaic distributed generation with battery storage for peer-to-peer energy trading. Appl. Energy 2018, 228, 2567–2580. [Google Scholar] [CrossRef]
- Bozalakov, D.V.; Vandoorn, T.L.; Meersman, B.; Papagiannis, G.K.; Chrysochos, A.I.; Vandevelde, L. Damping-Based Droop Control Strategy Allowing an Increased Penetration of Renewable Energy Resources in Low-Voltage Grids. IEEE Trans. Power Deliv. 2016, 31, 1447–1455. [Google Scholar] [CrossRef]
- Vandevelde, L.; Meersman, B. Increasing the Penetration of the Renewable Energy Sources in the Distribution Grid by Developing Control Strategies and Using Ancillary Services (INCREASE); EC-FP7 Project, Grant Agreement No.: 608998; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Kontis, E.O.; Kryonidis, G.C.; Chrysochos, A.I.; Demoulias, C.S.; Papagiannis, G.K. Long-term evaluation of DRES penetration in LV networks using droop control techniques. In Proceedings of the 2016 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Ljubljana, Slovenia, 9–12 October 2016. [Google Scholar]
- Voltage characteristics of electricity supplied by public distribution networks. In EN Standard 50160-2008; CEN-CENELEC Management Centre: Brussels, Belgium, 2008.
- Keerthisinghe, C.; Verbič, G.; Chapman, A.C. A Fast Technique for Smart Home Management: ADP With Temporal Difference Learning. IEEE Trans. Smart Grid 2018, 9, 3291–3303. [Google Scholar] [CrossRef]
- Conti, S.; Faraci, G.; Nicolosi, R.; Rizzo, S.A.; Schembra, G. Battery Management in a Green Fog-Computing Node: A Reinforcement-Learning Approach. IEEE Access 2017, 5, 21126–21138. [Google Scholar] [CrossRef]
- Marra, F.; Yang, G.; Træholt, C.; Østergaard, J.; Larsen, E. A Decentralized Storage Strategy for Residential Feeders With Photovoltaics. IEEE Trans. Smart Grid 2014, 5, 974–981. [Google Scholar] [CrossRef]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. Distributed energy storage for mitigation of voltage-rise impact caused by rooftop solar PV. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Meersman, B.; Renders, B.; Degroote, L.; Vandoorn, T.; Vandevelde, L. The influence of grid-connected three-phase inverters on voltage unbalance. In Proceedings of the IEEE PES General Meeting, Providence, RI, USA, 25–29 July 2010; pp. 1–9. [Google Scholar]
- Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F.; Timbus, A. Independent synchronization and control of three phase grid converters. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Taormina, Italy, 23–26 May 2006. [Google Scholar]
- Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F.; Timbus, A. PLL algorithm for power generation systems robust to grid voltage faults. In Proceedings of the 37th IEEE Power Electronics Specialist Conference (PESC 2006), Jeju, Korea, 18–22 June 2006. [Google Scholar]
- Chung, S.K. A phase tracking system for three phase utility interface inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef]
- Meersman, B.; Renders, B.; Degroote, L.; Vandoorn, T.; Vandevelde, L. Three-phase inverter-connected DG-units and voltage unbalance. Electr. Power Syst. Res. 2011, 81, 899–906. [Google Scholar] [CrossRef]
- Bozalakov, D.V.; Mnati, M.J.; Laveyne, J.; den Bossche, A.V.; Vandevelde, L. Voltage Unbalance and Overvoltage Mitigation by Using the Three-phase Damping Control Strategy in Battery Storage Applications. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018; pp. 753–759. [Google Scholar]
- Meersman, B. Control of 3-Phase Inverter-Connected Distributed Generators Regarding the Improvement of the Power Quality. Ph.D. Thesis, Universiteit Gent, Faculteit Ingenieurswetenschappen en Architectuur, Ghent, Belgium, 2012. [Google Scholar]
- Bozalakov, D.; Meersman, B.; Bottenberg, A.; Rens, J.; Desmet, J.; Vandevelde, L. Dc-bus voltage balancing controllers for split dc-link four-wire inverters and their impact on the quality of the injected currents. CIRED Open Access Proc. J. 2017, 2017, 564–568. [Google Scholar] [CrossRef]
- Vandoorn, T.L.; Meersman, B.; Degroote, L.; Renders, B.; Vandevelde, L. A Control Strategy for Islanded Microgrids With DC-Link Voltage Control. IEEE Trans. Power Deliv. 2011, 26, 703–713. [Google Scholar] [CrossRef]
- Renders, B. Convertor-Gekoppelde Decentrale Generatoren en Netkwaliteit in Laagspanningsnetten. Ph.D. Thesis, Universiteit Gent, Faculteit Ingenieurswetenschappen, Gent, Belgium, 2009. [Google Scholar]
- Renders, B.; Gusseme, K.D.; Ryckaert, W.R.; Vandevelde, L. Input impedance of grid-connected converters with programmable harmonic resistance. IET Electr. Power Appl. 2007, 1, 355–361. [Google Scholar] [CrossRef]
- Ryckaert, W.R.; Gusseme, K.D.; de Sype, D.M.V.; Ghijselen, J.A.; Melkebeek, J.A. Reduction of the voltage distortion with a converter employed as shunt harmonic impedance. In Proceedings of the APEC 2005 Twentieth Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 6–10 March 2005; Volume 3, pp. 1805–1810. [Google Scholar]
- Bozalakov, D.; Vandoorn, T.; Meersman, B.; Demoulias, C.; Vandevelde, L. Voltage dip mitigation capabilities of three-phase damping control strategy. Electr. Power Syst. Res. 2015, 121, 192–199. [Google Scholar] [CrossRef]
- Vavilapalli, S.; Padmanaban, S.; Subramaniam, U.; Mihet-Popa, L. Power Balancing Control for Grid Energy Storage System in Photovoltaic Applications—Real Time Digital Simulation Implementation. Energies 2017, 10, 928. [Google Scholar] [CrossRef]
- Cappelle, J.; Vanalme, J.; Vispoel, S.; Maerhem, T.V.; Verhelst, B.; Debruyne, C.; Desmet, J. Introducing small storage capacity at residential PV installations to prevent overvoltages. In Proceedings of the 2011 IEEE International Conference on Smart Grid Communications (SmartGridComm), Brussels, Belgium, 17–20 October 2011; pp. 534–539. [Google Scholar]
- Hashemi, S.; Østergaard, J. Efficient Control of Energy Storage for Increasing the PV Hosting Capacity of LV Grids. IEEE Trans. Smart Grid 2018, 9, 2295–2303. [Google Scholar]
- Thesla Powerwall 2 DC. Available online: https://www.solahart.com.au/media/2849/powerwall-2-dc_datasheet_english.pdf (accessed on 15 April 2019).
- Kryonidis, G.C.; Kontis, E.O.; Chrysochos, A.I.; Demoulias, C.S.; Bozalakov, D.; Meersman, B.; Vandoorn, T.L.; Vandevelde, L. A simulation tool for extended distribution grids with controlled distributed generation. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Degroote, L.; Renders, B.; Meersman, B.; Vandevelde, L. Neutral-point shifting and voltage unbalance due to single-phase DG units in low voltage distribution networks. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009. [Google Scholar]
- Xavier, L.S.; Cupertino, A.F.; Pereira, H.A. Ancillary services provided by photovoltaic inverters: Single and three phase control strategies. Comput. Electr. Eng. 2018, 70, 102–121. [Google Scholar] [CrossRef]
- Safa, A.; Berkouk, E.M.; Messlem, Y.; Gouichiche, A. A robust control algorithm for a multifunctional grid tied inverter to enhance the power quality of a microgrid under unbalanced conditions. Int. J. Electr. Power Energy Syst. 2018, 100, 253–264. [Google Scholar] [CrossRef]
- Olek, B.; Wierzbowski, M. Local Energy Balancing and Ancillary Services in Low-Voltage Networks With Distributed Generation, Energy Storage, and Active Loads. IEEE Trans. Ind. Electron. 2015, 62, 2499–2508. [Google Scholar] [CrossRef]
- Available online: http://www.europe-solarshop.com/inverters/sma.html (accessed on 15 April 2019).
- Available online: https://zerohomebills.com/product/sma-sunny-tripower-30000tl-us-10-30kw-solar-inverter/ (accessed on 15 April 2019).
- Available online: https://zerohomebills.com/product/tesla-powerwall-7-kw-with-storedge-dc-system/ (accessed on 15 April 2019).
- Available online: https://www.tesla.com/powerwall (accessed on 15 April 2019).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LINE | R (/km) | X (/km) | C (nF/km) | R (/km) | X (/km) | Length (km) |
|---|---|---|---|---|---|---|
| LV-2 | 0.456 | 0.088 | 250 | 4 | 0.0877 | 0.057 |
| 2-3 | 0.468 | 0.085 | 250 | 4 | 0.0851 | 0.094 |
| 3-4 | 0.48 | 0.08 | 250 | 4 | 0.08 | 0.025 |
| 4-5 | 0.462 | 0.083 | 250 | 4 | 0.0833 | 0.132 |
| 5-6 | 0.924 | 0.076 | 200 | 4 | 0.0758 | 0.066 |
| DRES | Rated Active | Case 0 | Case 1 | Case 2 |
|---|---|---|---|---|
| Power | Capacity/Output Power | Capacity/Output Power | Capacity/Output Power | |
| Node 2 DRES | 20 kW (Y) | 0 kWh/ 0 kW | 7 kWh/3.3 kW (0.35) * | 14 kWh/5 kW (0.70) * |
| Node 4 DRES | 20 kW (Y) | 0 kWh/ 0 kW | 7 kWh/3.3 kW (0.35) * | 14 kWh/5 kW (0.70) * |
| Node 5 DRES | 5 kW/bn | - | - | - |
| Node 6 DRES | 20 kW(Y) | 0 kWh/ 0 kW | 7 kWh/3.3 kW (0.35) * | 14 kWh/5 kW (0.70) * |
| Load | Rated Active Power | Rated Reactive Power |
|---|---|---|
| Node 3 Load 1 (Y) | 4.5/2.7/2.7 kW | 2.17/1.3/1.3 kvar |
| Node 4 Load 2 (Y) | 3.6/3.6/3.6 kW | 1.74/1.74/1.74 kvar |
| Node 6 Load 3 (Y) | 5.4/3.6/3.6 kW | 2.61/1.74/1.74 kvar |
| p.u. | p.u. | p.u. | p.u. | p.u. | |
|---|---|---|---|---|---|
| Case 0 (APD) | C0S1 | C0S2 | C0S3 | C0S4 | C0S5 |
| Case 1—7 kWh | C1S1 | C1S2 | C1S3 | C1S4 | C1S5 |
| Case 2—14 kWh | C2S1 | C2S2 | C2S3 | C2S4 | C2S5 |
| Parameter | p.u. | p.u. | p.u. | p.u. | p.u. |
|---|---|---|---|---|---|
| [A] | 32 | 38 | 42 | 45 | 47 |
| P [kW] | 20 | 23.6 | 26.1 | 28 | 29.2 |
| Inverter type | SMA Tripower | SMA Tripower | SMA Tripower | SMA Tripower | SMA Tripower |
| Sunny | Sunny | Sunny | Sunny | Sunny | |
| 20000TL-30 | 25000TL-30 | 30000TL-US-10 | 30000TL-US-10 | 30000TL-US-10 | |
| Inverter [kVA] | 20 | 25 | 30 | 30 | 30 |
| Inverter cost [Euro] | 2769.00 [49] | 2799.00 [49] | 3593.60 [50] | 3593.60 [50] | 3593.60 [50] |
| TeslaWall 1.0 price [Euro] | 4522.3 [51] | 4522.3 [51] | 4522.3 [51] | 4522.3 [51] | 4522.3 [51] |
| TeslaWall 2.0 price [Euro] | 7740 [52] | 7740 [52] | 7740 [52] | 7740 [52] | 7740 [52] |
| Total | 7291.3 * | 7321.3 * | 8115.9 * | 8115.9 * | 8115.9 * |
| 10,509 ** | 10,549 ** | 11,333.6 ** | 11,333.6 ** | 11,333.6 ** |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bozalakov, D.; Mnati, M.J.; Laveyne, J.; Desmet, J.; Vandevelde, L. Battery Storage Integration in Voltage Unbalance and Overvoltage Mitigation Control Strategies and Its Impact on the Power Quality. Energies 2019, 12, 1501. https://doi.org/10.3390/en12081501
Bozalakov D, Mnati MJ, Laveyne J, Desmet J, Vandevelde L. Battery Storage Integration in Voltage Unbalance and Overvoltage Mitigation Control Strategies and Its Impact on the Power Quality. Energies. 2019; 12(8):1501. https://doi.org/10.3390/en12081501
Chicago/Turabian StyleBozalakov, Dimitar, Mohannad J. Mnati, Joannes Laveyne, Jan Desmet, and Lieven Vandevelde. 2019. "Battery Storage Integration in Voltage Unbalance and Overvoltage Mitigation Control Strategies and Its Impact on the Power Quality" Energies 12, no. 8: 1501. https://doi.org/10.3390/en12081501