Research on Modeling and Hierarchical Scheduling of a Generalized Multi-Source Energy Storage System in an Integrated Energy Distribution System

Abstract
:1. Introduction
- (1)
- By combining the resources of conventional energy storage, multi-energy flow and demand response, a novel model named GMSES is proposed for a system-level equivalent energy storage effect.
- (2)
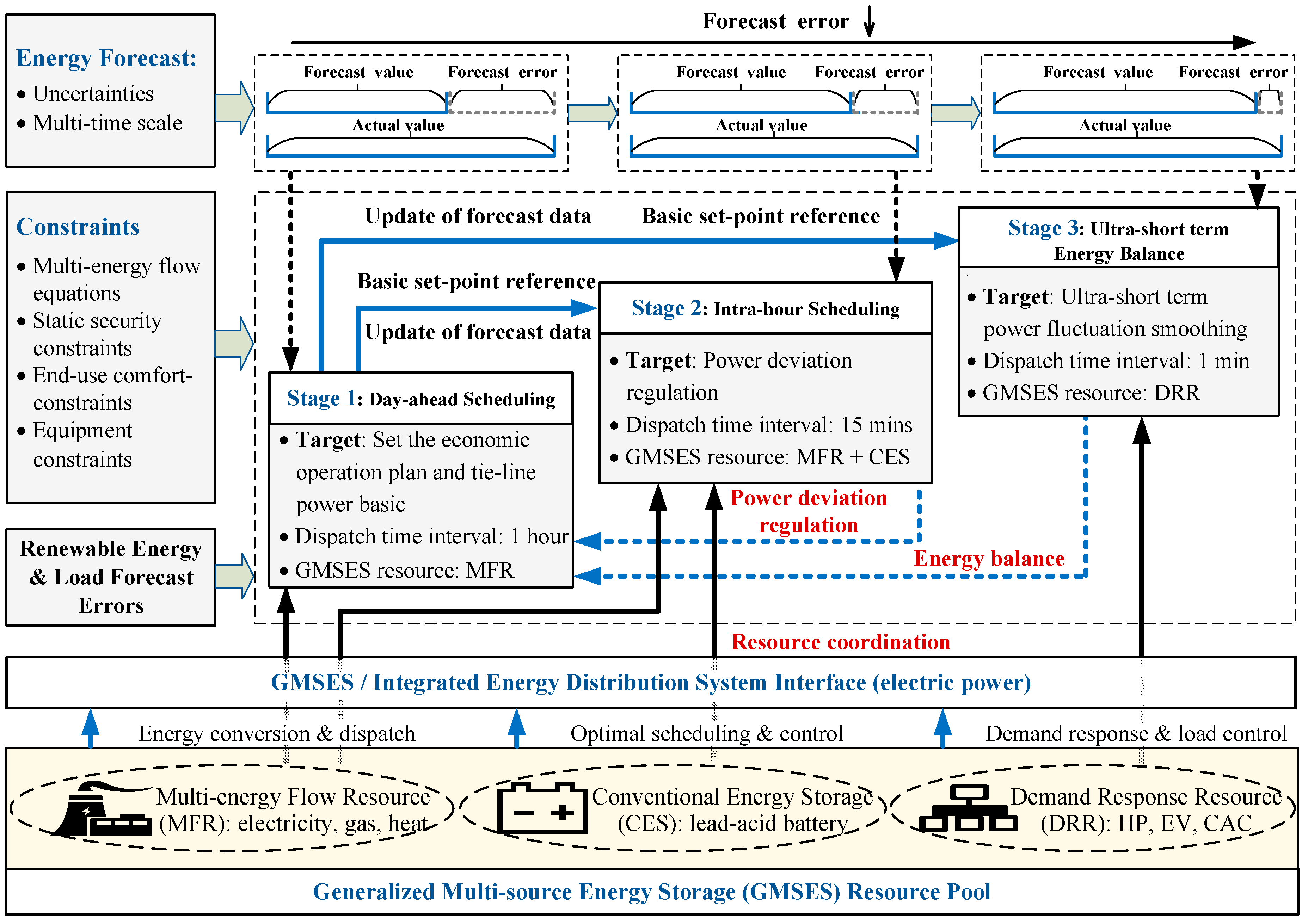
- A hierarchical scheduling framework is studied to take advantage of complementary characteristics of various resources in GMSES and meet the precise response to the control target.
- (3)
- A coupled co-optimization model is developed for multi-type and multi-timescale coordinated scheduling solution (including day-ahead, intra-hour and ultra-short-term scheduling), promoting the economical and stable operation of IEDS.
- (4)
- A general parameter serialization (GPS)-based control strategy is adopted for the flexible demand-side loads in GMSES.
2. Functional Framework and Comprehensive Modeling of Generalized Multi-Source Energy Storage
- (1)
- CES mainly refers to traditional battery energy storage in this paper. Currently, some typical CESs (i.e., lead-acid battery, lithium-ion battery, etc.) have been widely utilized for EPS applications [25]. To simplify the CES model, the lead-acid battery is selected with an operation time interval of 15 min to avoid too much power loss and lifecycle decrease caused by frequent dispatch [26].
- (2)
- MFR refers to the equivalent storage based on energy conversion and dispatch. Due to the microturbine response characteristics, MFR can be applied for longer time-scale dispatch schemes ranging from 15 min to 1 h in this paper, aiming at minimizing the operation costs in day-ahead scheduling and smoothing out the fluctuations in intra-hour scheduling [27].
- (3)
- DRR refers to the equivalent storage that aggregates flexible demand-side loads with reasonable control strategies [28]. Considering the fast-response characteristics of DRR, three typical controllable loads, i.e., heat pump (HP), central air conditioning (CAC), and electric vehicle (EV) are studied herein for energy balance service. The DRR operation time interval is set as 1 min.
2.1. GMSES-Conventional Energy Storage (CES)
2.2. GMSES Multi-Energy Flow Resource (MFR)
2.3. GMSES Demand Response Resource (DRR)
2.3.1. General Model of GMSES-DRR
2.3.2. General Control Strategy of GMSES-DRR
2.4. Virtual State of Charge of GMSES
3. Hierarchical Optimal Scheduling with Generalized Multi-Source Energy Storage
3.1. Framework of Optimal Scheduling with Generalized Multi-Source Energy Storage
- (1)
- The system layer is primarily responsible for collecting the energy forecast information (including electricity, heat and natural gas) and the operation information of the GMSES parts (including CES, MFR and DRR). According to the current system operation conditions, the system layer sets the optimal scheduling plan and transmit the information to GMSES subsystems.
- (2)
- The aggregation layer can be regarded as a nexus that is responsible for converting the upper-layer optimal scheduling plan into the corresponding control signals, such as the BEH dispatch factors of MFR and energy storage unit instructions. As the core of energy conversion, the MFR controller is abstracted mathematically based on the energy station. In addition, information feedback and equipment aggregation of the equipment layer are available. Thus, equipment constraints can be obtained and specified.
- (3)
- The equipment layer mainly refers to the groups of controllable units. They upload their own operation information to the aggregation layer. Simultaneously, upper-layer control signals can be received. Therefore, the operation status of the controllable units is regulated for the implementation of the scheduling plan.
3.2. Hierarchical Optimal Scheduling
3.2.1. Objectives
3.2.2. Constraints
3.3. Hierarchical Optimal Scheduling Algorithm
4. Case Study
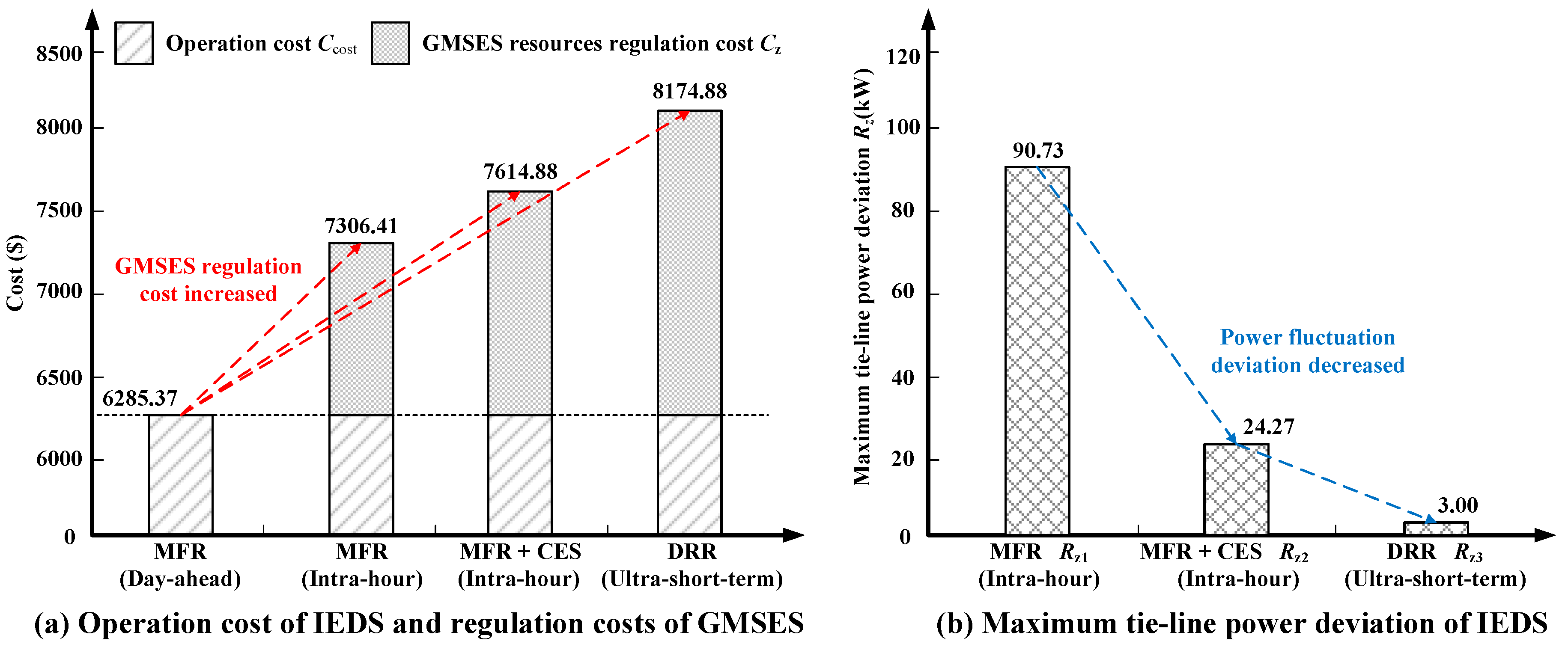
4.1. Case 1: Day-Ahead Optimal Scheduling
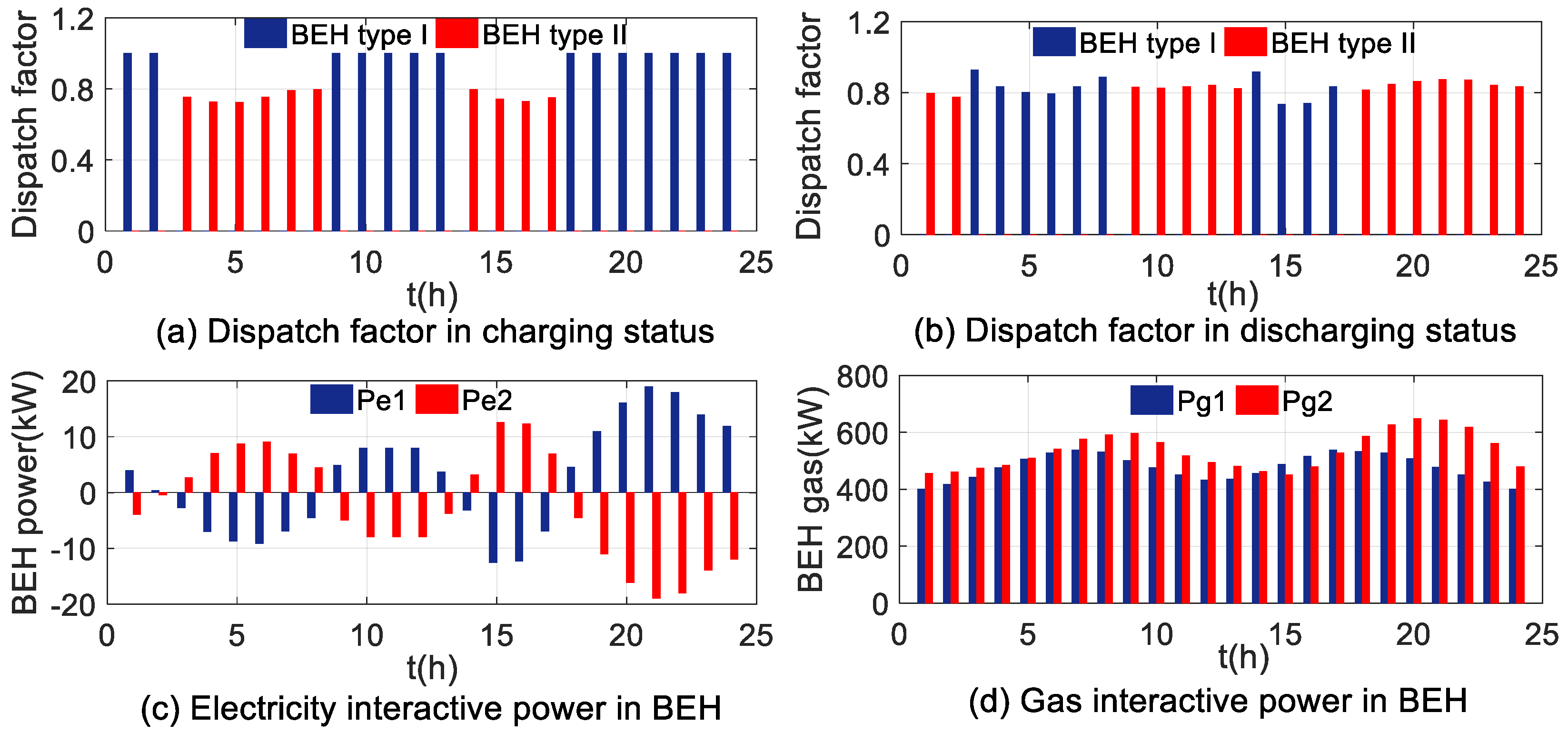
4.2. Case 2: Intra-Hour Optimal Scheduling
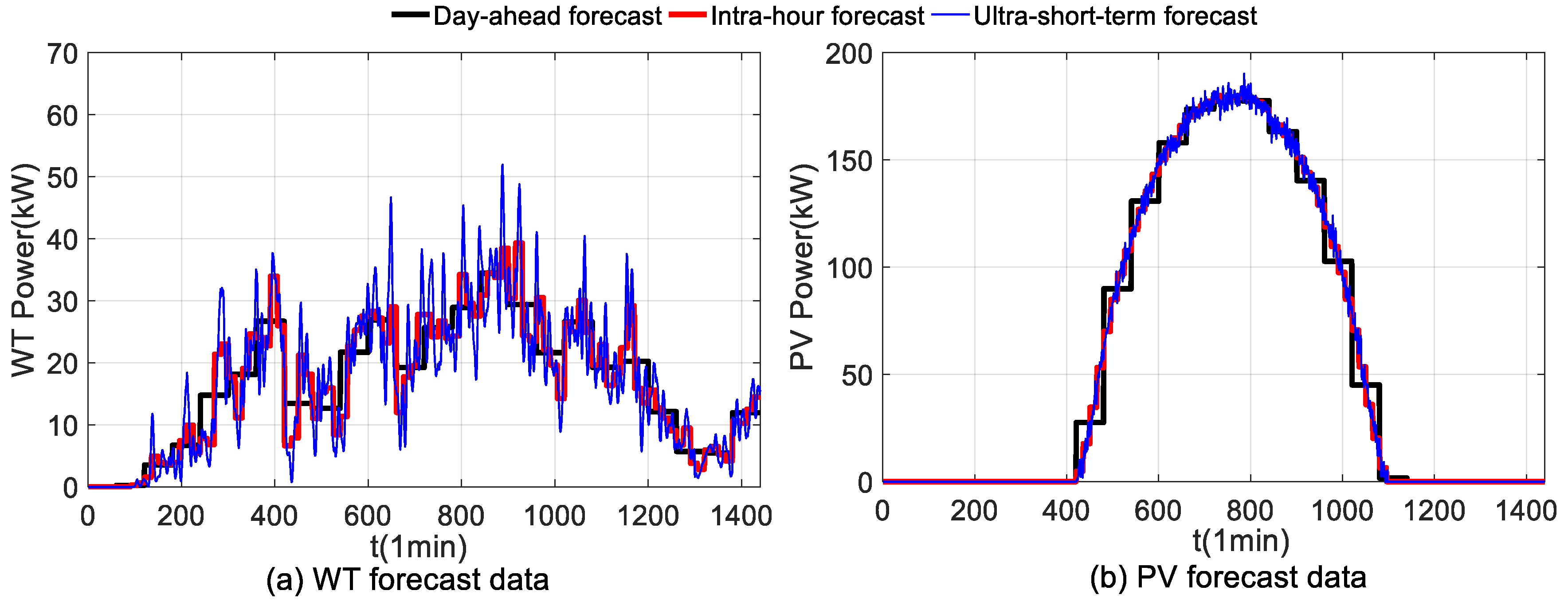
4.3. Case 3: Ultra-Short-Term Energy Balance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Notation | Description |
| State of charge (SOC) of the kth energy storage unit at period t | |
| SOC variation of the kth energy storage unit at period t | |
| , | Upper and lower boundaries of SOC of the kth energy storage unit |
| , | Upper and lower boundaries of SOC variation of the kth energy storage unit |
| , | Charging and discharging power of the kth conventional energy storage (CES) unit |
| , | Charging and discharging efficiency of the kth CES unit |
| Rated power of the kth CES unit | |
| , | The beginning and the end of SOC of the kth CES unit |
| , | Electricity and natural gas power input of bi-directional energy hub (BEH) |
| , | Electrical and thermal loads of BEH |
| , | Gas-electricity energy conversion efficiency and gas-heat energy conversion efficiency in combined heat and power (CHP) |
| , | Energy conversion efficiency of air-conditioner system and gas boiler (GB) |
| , | Dispatch factors of BEH in charging/standby, discharging status |
| , | Subscript of lower and upper boundaries |
| , | Maximum output power of CHP, and air-conditioner system |
| The branch-nodal incidence matrix of natural gas system (NGS) | |
| , , | A vector of mass flow rates through branches, a vector of gas supplies and gas demands at each node of NGS |
| , | Gas demand at node and node with connected BEH |
| , , | Gas demand at node and node without connected BEH, and gross heating value (GHV) |
| Pressure drop along the pipe of NGS | |
| , , , , | Diameter of pipe, friction factor, length of pipe, gas specific gravity, and gas flow rate of NGS |
| , , , | Equipment operation status (open/off/idle) in DRR, charging status of electric vehicles |
| The th responsive load for type in demand response resource (DRR) | |
| , | Set of operation status in DRR, the th operation status of mn in DRR |
| Numbers of operation status of mn in DRR | |
| DRR physical model at operation status at period | |
| , | Set of responsive load types including heat pump, electric vehicle and central air conditioning, total response numbers of each DRR types |
| , , | The th parameter of DRR physical characteristics, the th key operation parameter and the th control variable of mn in DRR |
| O, A, B | Numbers of physical characteristics, key operation parameters and control variables of mn in DRR |
| , | The th operation power and rated power of mn in DRR |
| The th load efficiency factor of mn in DRR | |
| , | Upper and lower boundaries of the th key operation parameter |
| U, V | Operation status of DRR when or |
| Daily operation costs of integrated energy distribution system | |
| , , | Operation costs of conventional loads in electric power system (EPS) and NGS, and coupled loads in BEH at period |
| , , | Electricity prices to purchase and sell, gas price to purchase |
| , | Electric and gas power consumed by conventional electric loads and conventional gas loads at period |
| Interactive electric power in BEH at period | |
| Consumed gas power in BEH at period t | |
| , , | Scheduling periods of hours, 15 minutes, 1 minute |
| , | Target setting tie-line power, actually optimized tie-line power |
| , , | The set of variables of EPS, NGS and BEH |
| , | Upper and lower boundaries of EPS variables |
| , | Upper and lower boundaries of NGS variables |
| , | Upper and lower limits of the equipment output considering component capacities of BEHs |
| , | Upward and down regulations of the total DRR groups in node at period t |
| Demand side power regulation in node at period t | |
| Controlled price for the type m load in DRR | |
| Power consumption of the type m load in DRR at period | |
| Response target for the type m load in DRR at period | |
| , | Upward and down regulations for the type m load of DRR groups at period |
| IEDS | Integrated energy distribution system |
| GMSES | Generalized multi-source energy storage |
| CES | Conventional energy storage |
| MFR | Multi-energy flow resource |
| DRR | Demand response resource |
| GPS | General parameter serialization (GPS)-based control strategy |
| EPS | Electric power system |
| NGS | Natural gas system |
| DHS | District heating system |
Appendix A





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | 712 | 713 | 720 | 735 | ||
|---|---|---|---|---|---|---|
| Type | ||||||
| HP | Phase A | 120 | 0 | 0 | 100 | |
| Phase B | 0 | 0 | 100 | 0 | ||
| Phase C | 0 | 150 | 0 | 0 | ||
| EV | Phase A | 0 | 0 | 300 | 0 | |
| Phase B | 350 | 0 | 0 | 0 | ||
| Phase C | 0 | 400 | 0 | 320 | ||
| CAC | Phase A | 25 | 0 | 0 | 0 | |
| Phase B | 0 | 0 | 0 | 14 | ||
| Phase C | 0 | 20 | 22 | 0 | ||
| Type | Parameter Name | Parameter Value | Parameter Name | Parameter Value |
|---|---|---|---|---|
| HP | Average equivalent thermal resistance/(°C/W) | 0.121 | Average equivalent thermal capacitance/(J/°C) | 3599.3 |
| Average equivalent heat ratio/W | 400 | Rated power/kW | 6 | |
| Initial temperature/°C | 21 | Temperature deadband/°C | 4 | |
| Regulation cost/($/kWh) | 0.230 | Controlled period/min | 1 | |
| EV | Energy state upper boundary | 0.0125 | Energy state lower boundary | −0.0125 |
| Charging power/kW | 5 | Charging efficiency | 95% | |
| Regulation cost/($/kWh) | 0.155 | Battery capacity/kWh | 5.00~20.00 | |
| Energy state deadband | 0.025 | Controlled period/min | 1 | |
| CAC | Average energy efficiency ratio | 5 | Average rated power/kW | 40 |
| Coefficient of low consumption | 0.1 | Initial room temperature/°C | 24 | |
| Temperature deadband/°C | 5 | Range of gear numbers | [3,10] | |
| Regulation cost/($/kWh) | 2.797 | Standard deviation of gear numbers | 2.07 | |
| Controlled period/min | 5 |
References
- Wen, S.; Lan, H.; Fu, Q.; Yu, D.C.; Zhang, L. Economic allocation for energy storage system considering wind power distribution. IEEE Trans. Power Syst. 2015, 30, 644–652. [Google Scholar] [CrossRef]
- He, G.; Chen, Q.; Kang, C.; Xia, Q.; Poolla, K. Cooperation of wind power and battery storage to provide frequency regulation in power markets. IEEE Trans. Power Syst. 2017, 32, 3559–3568. [Google Scholar] [CrossRef]
- Ibrahim, H.; Ilinca, A.; Perron, J. Energy storage systems--characteristics and comparisons. Renew. Sustain. Energy Rev. 2008, 12, 1221–1250. [Google Scholar] [CrossRef]
- Singh, S.; Singh, M.; Kaushik, S.C. Feasibility study of an islanded microgrid in rural area consisting of PV, wind, biomass and battery energy storage system. Energy Convers. Manag. 2016, 128, 178–190. [Google Scholar] [CrossRef]
- European commission. Strategic energy technologies [online]. 2013. Available online: http://setis.ec.europa.eu/technologies (accessed on 14 August 2018).
- Zito, R. Energy Storage; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Zhao, H.; Wu, Q.; Hu, S.; Xu, H.; Rasmussen, C.N. Review of energy storage system for wind power integration support. Appl. Energy 2015, 137, 545–553. [Google Scholar] [CrossRef] [Green Version]
- Lott, M.C.; Kim, S.I.; Tam, C.; Houssin, D.; Gagné, J.F. Technology Roadmap: Energy Storage; International Energy Agency: Paris, France, 2014. [Google Scholar]
- Chen, H.; Cong, T.N.; Yang, W.; Tan, C.; Li, Y.; Ding, Y. Progress in electrical energy storage system: A critical review. Prog. Nat. Sci. 2009, 19, 291–312. [Google Scholar] [CrossRef]
- Chen, J.Z.; Liao, W.Y.; Hsieh, W.Y.; Hsu, C.C.; Chen, Y.S. All-vanadium redox flow batteries with graphite felt electrodes treated by atmospheric pressure plasma jets. J. Power Sources 2015, 274, 894–898. [Google Scholar] [CrossRef]
- Jacob, A.S.; Banerjee, R.; Ghosh, P.C. Sizing of hybrid energy storage system for a PV based microgrid through design space approach. Appl. Energy 2018, 212, 640–653. [Google Scholar] [CrossRef]
- Reihani, E.; Motalleb, M.; Thornton, M.; Ghorbani, R. A novel approach using flexible scheduling and aggregation to optimize demand response in the developing interactive grid market architecture. Appl. Energy 2016, 183, 445–455. [Google Scholar] [CrossRef]
- Cole, W.J.; Marcy, C.; Krishnan, V.K.; Margolis, R. Utility-scale lithium-ion storage cost projections for use in capacity expansion models. In Proceedings of the North American Power Symposium (NAPS), Denver, CO, USA, 18–20 September 2016; pp. 1–6. [Google Scholar]
- Wang, D.; Liu, L.; Jia, H.; Wang, W.; Zhi, Y.; Meng, Z.; Zhou, B. Review of key problems related to integrated energy distribution systems. CSEE J. Power Energy Syst. 2018, 4, 130–145. [Google Scholar] [CrossRef]
- Li, G.; Zhang, R.; Jiang, T.; Chen, H.; Bai, L.; Cui, H.; Li, X. Optimal dispatch strategy for integrated energy systems with CCHP and wind power. Appl. Energy 2017, 192, 408–419. [Google Scholar] [CrossRef]
- Li, Y.; Zou, Y.; Tan, Y.; Cao, Y.; Liu, X.; Shahidehpour, M.; Tian, S.; Bu, F. Optimal stochastic operation of integrated low-carbon electric power, natural gas, and heat delivery system. IEEE Trans. Sustain. Energy 2018, 9, 273–283. [Google Scholar] [CrossRef]
- Song, H.; Yu, G.; Qu, Y. Web of cell architecture-new perspective for future smart grids. Autom. Electr. Power Syst. 2017, 41, 1–9. [Google Scholar]
- Javadi, M.; Marzband, M.; Funsho Akorede, M.; Godina, R.; Saad Al-Sumaiti, A.; Pouresmaeil, E. A centralized smart decision-making hierarchical interactive architecture for multiple home microgrids in retail electricity market. Energies 2018, 11, 3144. [Google Scholar] [CrossRef]
- Valinejad, J.; Marzband, M.; Funsho Akorede, M.; D Elliott, I.; Godina, R.; Matias, J.; Pouresmaeil, E. Long-term decision on wind investment with considering different load ranges of power plant for sustainable electricity energy market. Sustainability 2018, 10, 3811. [Google Scholar] [CrossRef]
- Wang, W.; Wang, D.; Jia, H.; Zhi, Y.; Liu, L.; Fan, M.; Lin, J. Economic dispatch of generalized multi-source energy storage in regional integrated energy systems. Energy Procedia 2017, 142, 3270–3275. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Begovic, M.M.; Chen, C. Coordinated energy management of networked microgrids in distribution systems. IEEE Trans. Smart Grid 2015, 6, 45–53. [Google Scholar] [CrossRef]
- Valinejad, J.; Barforoshi, T.; Marzband, M.; Pouresmaeil, E.; Godina, R.; PS Catalão, J. Investment incentives in competitive electricity markets. Appl. Sci. 2018, 8, 1978. [Google Scholar] [CrossRef]
- Tavakoli, M.; Shokridehaki, F.; Marzband, M.; Godina, R.; Pouresmaeil, E. A two stage hierarchical control approach for the optimal energy management in commercial building microgrids based on local wind power and PEVs. Sustain. Cities Soc. 2018, 41, 332–340. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Qu, C. A hierarchical framework for generation scheduling of microgrids. IEEE Trans. Power Deliv. 2014, 29, 2448–2457. [Google Scholar] [CrossRef]
- Sami, S.S.; Cheng, M.; Wu, J. Modelling and control of multi-type grid-scale energy storage for power system frequency response. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 269–273. [Google Scholar]
- Dugan, R.C.; Taylor, J.A.; Montenegro, D. Energy storage modeling for distribution planning. IEEE Trans. Ind. Appl. 2017, 53, 954–962. [Google Scholar] [CrossRef]
- Xu, X.; Jin, X.; Jia, H.; Yu, X.; Li, K. Hierarchical management for integrated community energy systems. Appl. Energy 2015, 160, 231–243. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Y.; Chen, K.; Chen, S.Z.; Tang, B. Equivalence of multi-time scale optimization for home energy management considering user discomfort preference. IEEE Trans. Smart Grid 2017, 8, 1876–1887. [Google Scholar] [CrossRef]
- Belderbos, A.; Delarue, E.; D’haeseleer, W. Possible role of power-to-gas in future energy systems. In Proceedings of the 2015 12th International Conference on the European Energy Market (EEM), Lisbon, Portugal, 19–22 May 2015; pp. 1–5. [Google Scholar]
- Ahern, E.P.; Deane, P.; Persson, T.; Gallachóir, B.Ó.; Murphy, J.D. A perspective on the potential role of renewable gas in a smart energy island system. Renew. Energy 2015, 78, 648–656. [Google Scholar] [CrossRef]
- Liu, D.; Li, H. A ZVS bi-directional DC–DC converter for multiple energy storage elements. IEEE Trans. Power Electron. 2006, 21, 1513–1517. [Google Scholar] [CrossRef]
- Wang, W.; Wang, D.; Jia, H.; Chen, Z.; Tang, J. A decomposed solution of multi-energy flow in regional integrated energy systems considering operational constraints. Energy Procedia 2017, 105, 2335–2341. [Google Scholar] [CrossRef]
- Kandasamy, N.K.; Tseng, K.J.; Boon-Hee, S. Virtual storage capacity using demand response management to overcome intermittency of solar PV generation. IET Renew. Power Gener. 2017, 11, 1741–1748. [Google Scholar] [CrossRef]
- Liu, K.; Yang, W.; Wang, D.; Jia, H.; Gui, H.; Song, Y.; Fan, M. Reaearch on renewable energy scheduling and node aggregrated demand response strategy based on distribution network power flow tracking. Proc. CSEE 2018, 38, 5714–5726. [Google Scholar]
- Lu, N.; Chassin, D.P. A state-queueing model of thermostatically controlled appliances. IEEE Trans. Power Syst. 2004, 19, 1666–1673. [Google Scholar] [CrossRef]
- Arvesen, Ø.; Medbø, V.; Fleten, S.E.; Tomasgard, A.; Westgaard, S. Linepack storage valuation under price uncertainty. Energy 2013, 52, 155–164. [Google Scholar] [CrossRef] [Green Version]
- Houwing, M.; Negenborn, R.R.; De Schutter, B. Demand response with micro-CHP systems. Proc. IEEE 2011, 99, 200–213. [Google Scholar] [CrossRef]
- Dugan, R.C.; McDermott, T.E. An open source platform for collaborating on smart grid research. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–7. [Google Scholar]
- Tang, J.; Wang, D.; Wang, X.; Jia, H.; Wang, C.; Huang, R.; Yang, Z.; Fan, M. Study on day-ahead optimal economic operation of active distribution networks based on Kriging model assisted particle swarm optimization with constraint handling techniques. Appl. Energy 2017, 204, 143–162. [Google Scholar] [CrossRef]
- Negash, A.I.; Haring, T.W.; Kirschen, D.S. Allocating the cost of demand response compensation in wholesale energy markets. IEEE Trans. Power Syst. 2015, 30, 1528–1535. [Google Scholar] [CrossRef]
- Wang, W.; Wang, D.; Jia, H.; He, G.; Hu, Q.E.; Sui, P.C.; Fan, M. Performance evaluation of a hydrogen-based clean energy hub with electrolyzers as a self-regulating demand response management mechanism. Energies 2017, 10, 1211. [Google Scholar] [CrossRef]
- Pacific Gas & Electrc. Available online: http://www.pge.com/tariffs/electric.shtml (accessed on 16 August 2018).























| Name | ||||
|---|---|---|---|---|
| HP | thermodynamic parameters of related buildings | indoor temperature | on/off state | close-0 open-1 |
| EV | energy state | energy state energy state boundaries | charging state | idle-0 charge-1 |
| CAC | thermodynamic parameters of related buildings | indoor temperature | load rate | heating mode non-heating mode |
| Scenarios | Descriptions | Responsive Resources | Time Scale |
|---|---|---|---|
| Case 1 | In the day-ahead scenario, the multi-energy flow can be optimized for the sake of economical operation. | GMSES-MFR | 1 h |
| Case 2 | In the intra-hour scenario, with the updated forecast data, power deviation in the day-ahead scheduling can be regulated. | GMSES-MFR GMSES-CES | 15 min |
| Case 3 | In the ultra-short-term scenario, energy balance service can be provided and the aperiodic power fluctuations caused by renewable energy and load variation can be smoothed. | GMSES-DRR | 1 min |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Wang, D.; Liu, L.; Jia, H.; Zhi, Y.; Meng, Z.; Du, W. Research on Modeling and Hierarchical Scheduling of a Generalized Multi-Source Energy Storage System in an Integrated Energy Distribution System. Energies 2019, 12, 246. https://doi.org/10.3390/en12020246
Wang W, Wang D, Liu L, Jia H, Zhi Y, Meng Z, Du W. Research on Modeling and Hierarchical Scheduling of a Generalized Multi-Source Energy Storage System in an Integrated Energy Distribution System. Energies. 2019; 12(2):246. https://doi.org/10.3390/en12020246
Chicago/Turabian StyleWang, Weiliang, Dan Wang, Liu Liu, Hongjie Jia, Yunqiang Zhi, Zhengji Meng, and Wei Du. 2019. "Research on Modeling and Hierarchical Scheduling of a Generalized Multi-Source Energy Storage System in an Integrated Energy Distribution System" Energies 12, no. 2: 246. https://doi.org/10.3390/en12020246