1. Introduction
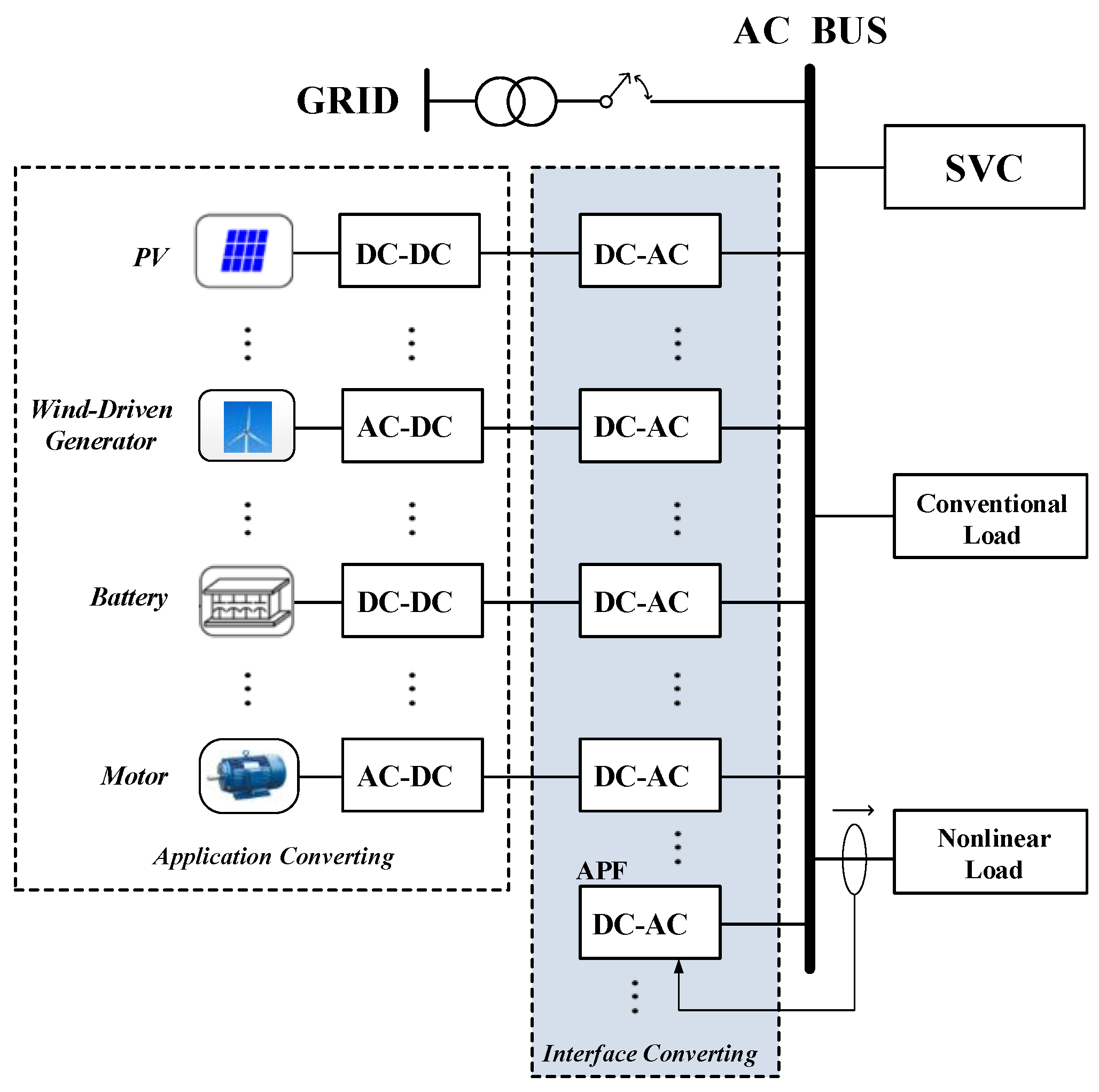
Currently, multi-parallel grid-connected inverters with the features of effective controllability and high efficiency are widely applied in modern power systems, such as renewable energy generation, electric railway, energy storage, and harmonic suppression systems [
1,
2], as shown in
Figure 1. However, the large-scale use of inverters will inject high-order harmonics into the power grid and may result in series and parallel resonance [
3,
4]. The interactions among individual inverters and with passive components, especially capacitors, may cause power system instability [
5,
6,
7,
8,
9,
10,
11]. Consequently, it is necessary to anticipate system stability before connecting inverters to the power grid, especially under weak grid conditions. The existing stability analysis methods can be divided into two types: Nonlinear and linear methods. The nonlinear methods [
12,
13] involve intensive computations and are not suitable for large-scale grid-connected systems. In contrast, the linear methods require fewer computations and can be used to intuitively assess system stability. Eigenvalue-based and impedance-based methods are two common linear analysis techniques used to assess power system stability [
14].
The eigenvalue-based approach is implemented in the time domain [
15,
16,
17]. To utilize the eigenvalue-based approach, a state-space model of the whole system, including inverters and loads, should be established. Then, the state-space model is linearized around a fixed operation point. Next, the eigenvalues of the linearized model can be determined. The system is stable if and only if all the eigenvalues have a negative real part [
18]. The eigenvalue-based method is a global stability analysis method that is not limited by the selection of interface points. This approach is suitable for well-defined systems with parameters and operations that do not vary frequently, such as traditional power systems. Individual loads are not important in such systems because of their small capacities. However, the corresponding principles have not been established for grid-connected systems in which the number of grid-connected inverters changes frequently and loads play an important role. When loads or grid-connected inverters are added or removed, the establishment of the state-space model should be repeated, which makes the analysis process inefficient.
The impedance-based approach is a frequency-domain analysis technique [
19,
20,
21,
22,
23,
24,
25,
26]. This method was originally presented in [
19] and was used to study the interactions between DC-DC converters and their filters. A grid-connected inverter is modeled as a current source in parallel with an output impedance, and the loads are modeled as input impedances. The system stability at the point of common coupling (PCC) can be assessed by determining whether the ratio of the load input impedance to the inverter output impedance (defined as the minor loop gain (MLG)) satisfies the Nyquist stability criterion [
21,
22,
23]. Compared to the eigenvalue-based approach, the formulation of the system matrix can be avoided in this method. Changing the number of inverters or the operation mode of loads only influences one impedance element, which consequently has a minimal effect on the system model. Apart from the ratio-type impedance-based stability criterion, a sum-type stability criterion for hybrid energy storage systems is proposed to assess the harmonic instability in a simpler way because the right half plane zeros in the impedance of the subsystem are not required [
27]. Therefore, the system stability can be analyzed in one step only instead of two steps using the traditional ratio-type criterion. However, the advantages of the sum-type criterion include not only the simplification of the stability determination procedure but also the identification of the characteristics of the particular system.
To further study the application of the sum-type criterion in a multi-parallel grid-connected system, this paper proposes a global admittance-based stability criterion. The global admittance from the PCC is defined as the summation of all the admittances, including the grid admittance, other passive admittances, and all the output admittances of the inverters. The stability can be assessed based on a frequency-domain analysis of global admittance. Compared to the state-space model and eigenvalue-based approach, adding or removing inverters has a minimal effect on the system model. Thus, the approach is applicable to grid-connected systems. This method is a global stability analysis technique, and there is no need to analyze the stability of each inverter, which reduces the computational burden. Additionally, the effects of individual components on the system stability can be determined. This criterion indicates that the sufficient and necessary condition for grid-connected system stability is that the global admittance has a positive real part at the resonance frequency, thereby providing stability-oriented design guidelines.
This paper is organized as follows. The parallel system is modeled and analyzed in
Section 2. And in this section, the current-loop admittance model is given.
Section 3 introduces the traditional impedance-based stability criterion for the single grid-connected inverter system and multi-parallel grid-connected inverter system. In
Section 4, the proposed global admittance-based stability criterion is introduced. Especially, the system stability analysis when inverters with different parameters are connected to the grid is discussed in this section. The simulation and experimental results are provided to validate the theoretical approach in
Section 5. Finally,
Section 6 summarizes the work.
2. System Modeling
In this section, the parallel system is modeled and analyzed. On this basis, the current-loop admittance model and equivalent model of the multi-parallel grid-connected voltage source inverter (VSI) system are given.
2.1. System Description
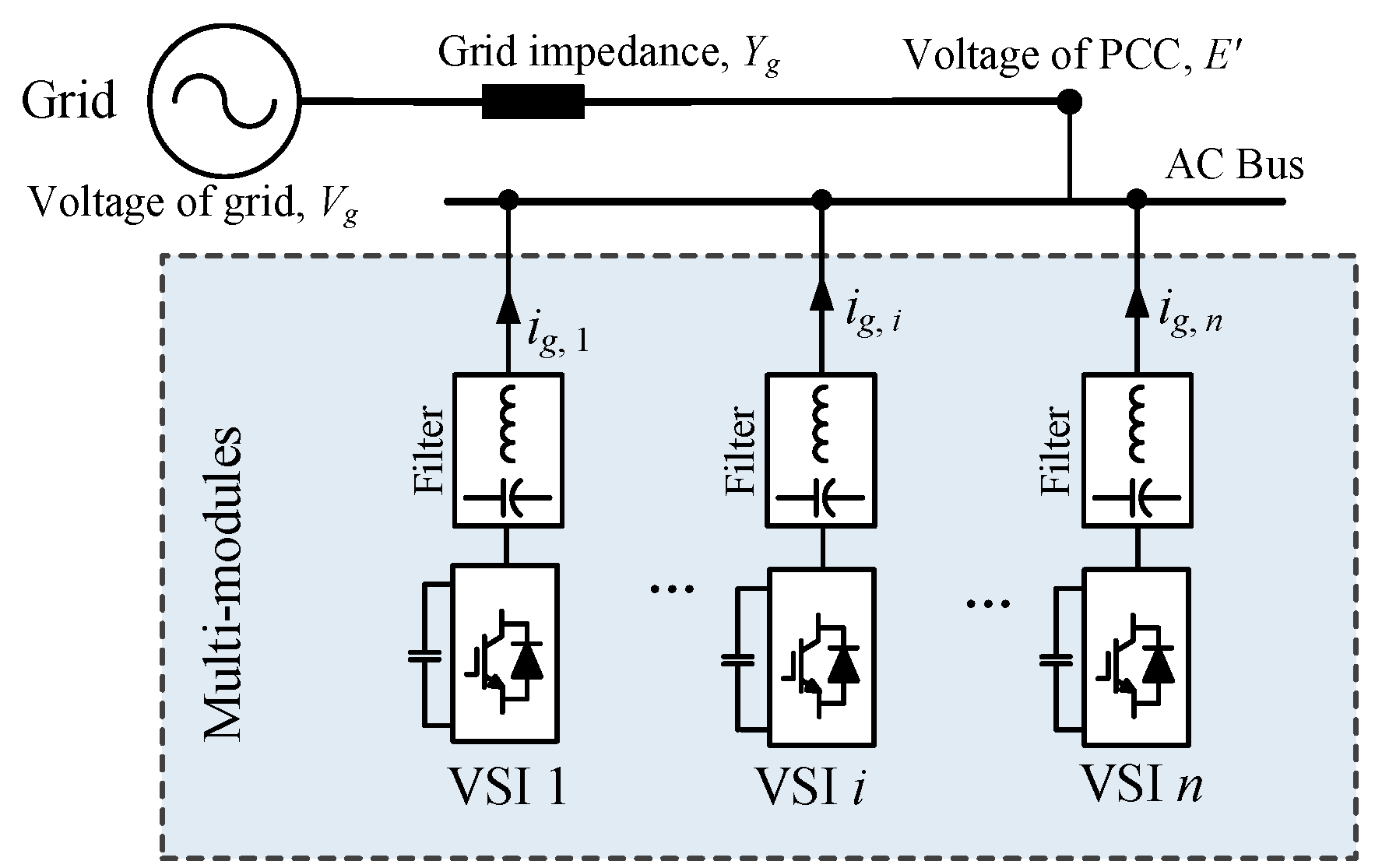
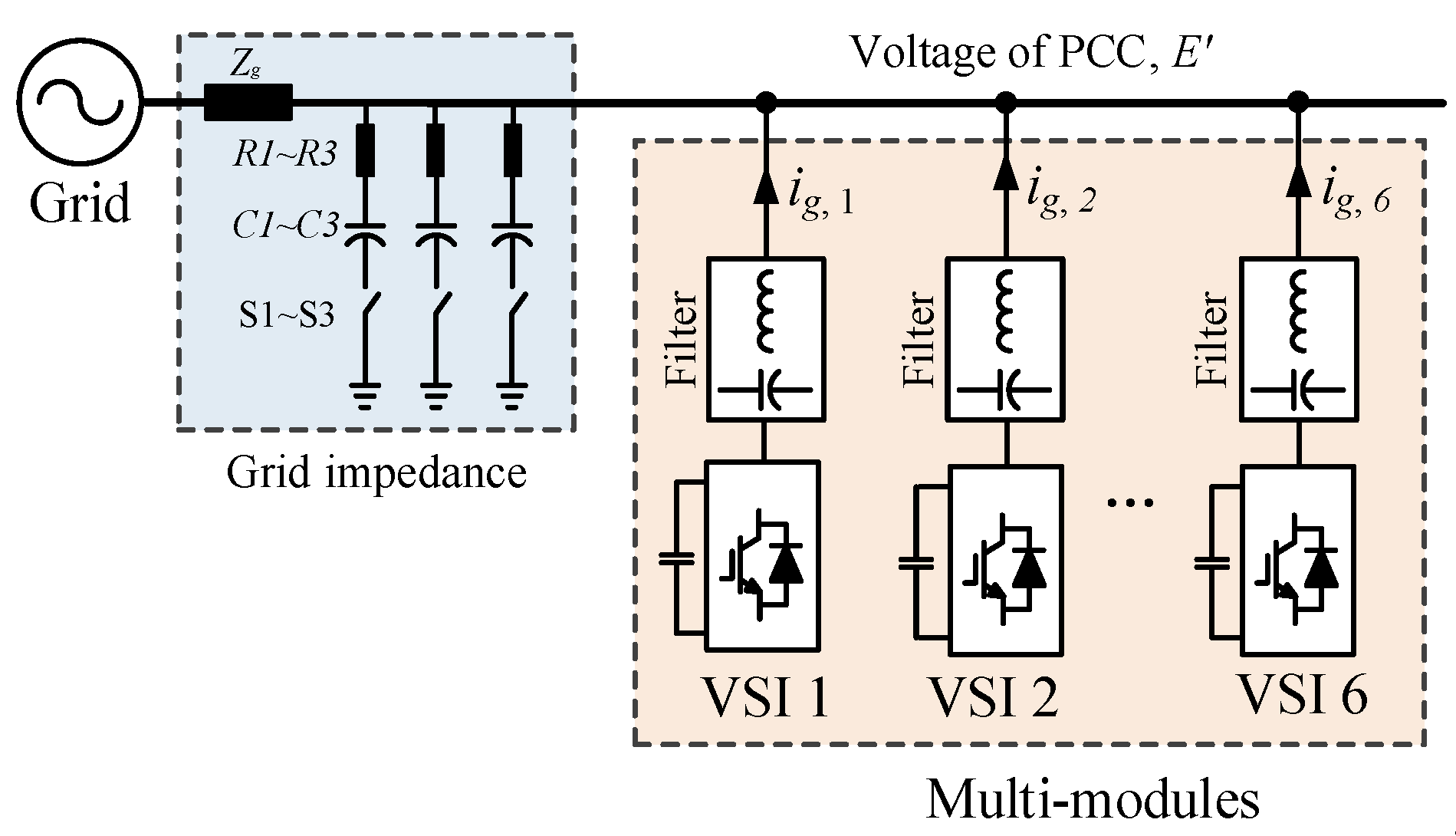
The multi-parallel grid-connected VSI system is shown in
Figure 2. Multiple inverters are connected to the power grid via a common AC bus. The VSIs operate as current sources that inject real power into the power grid. In such a grid-connected VSI system, due to the non-negligible grid impedance, the control loops of inverters interact with each other, which will result in a resonance phenomenon. The interactions between the inverters and capacitors of filters will also lead to oscillations.
2.2. Admittance Modeling of a Single-Inverter System
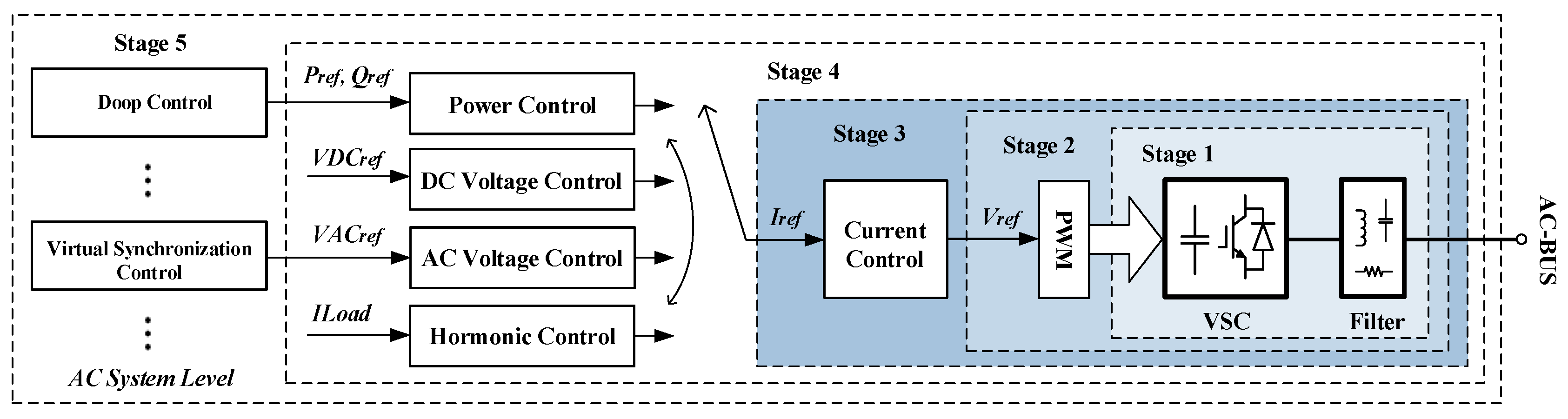
There are three types of grid-connection modes: Current-controlled source mode, voltage-controlled source mode, and harmonic compensation mode. The multi-inverter parallel systems in various fields are typically composed of a control target and bottom control, as shown in
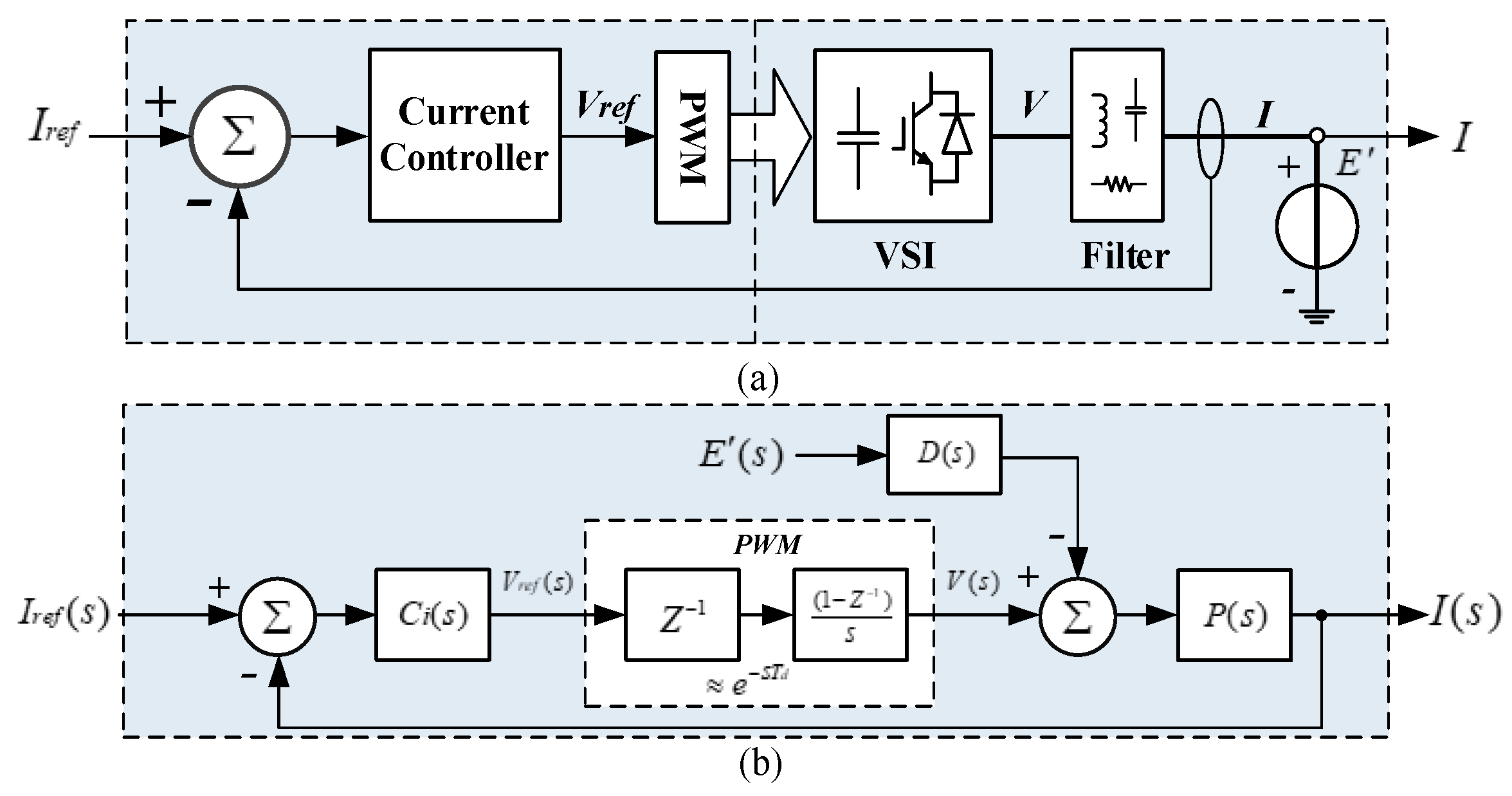
Figure 3. The critical component that determines the stability of the multi-inverter parallel system is the current control layer, which can be described and unified as shown in
Figure 4a.
The harmonic instability resulting from the inner control loop is the focus of this paper. In this case, the dynamics of the voltage loop can be ignored, and the DC-link voltages of inverters are assumed to be constant. In addition, the response speed of the inner loop is much faster than that of the phase-lock-loop (PLL); thus, the PLL dynamics are neglected. Based on these two principles, the reference currents are treated as constants.
The control system in
Figure 4a can be expressed as a block diagram, as shown in
Figure 4b. In the practical application field, the power grid is not ideal, and there is a certain grid impedance, which leads to the output current potentially affecting the PCC voltage, namely, they have a coupling relationship with mutual influence. Therefore, it is difficult to directly analyze the response of the entire system using this control block diagram. The actual output current expression can be written in admittance form, as shown in Equation (1):
where
,
, and
.
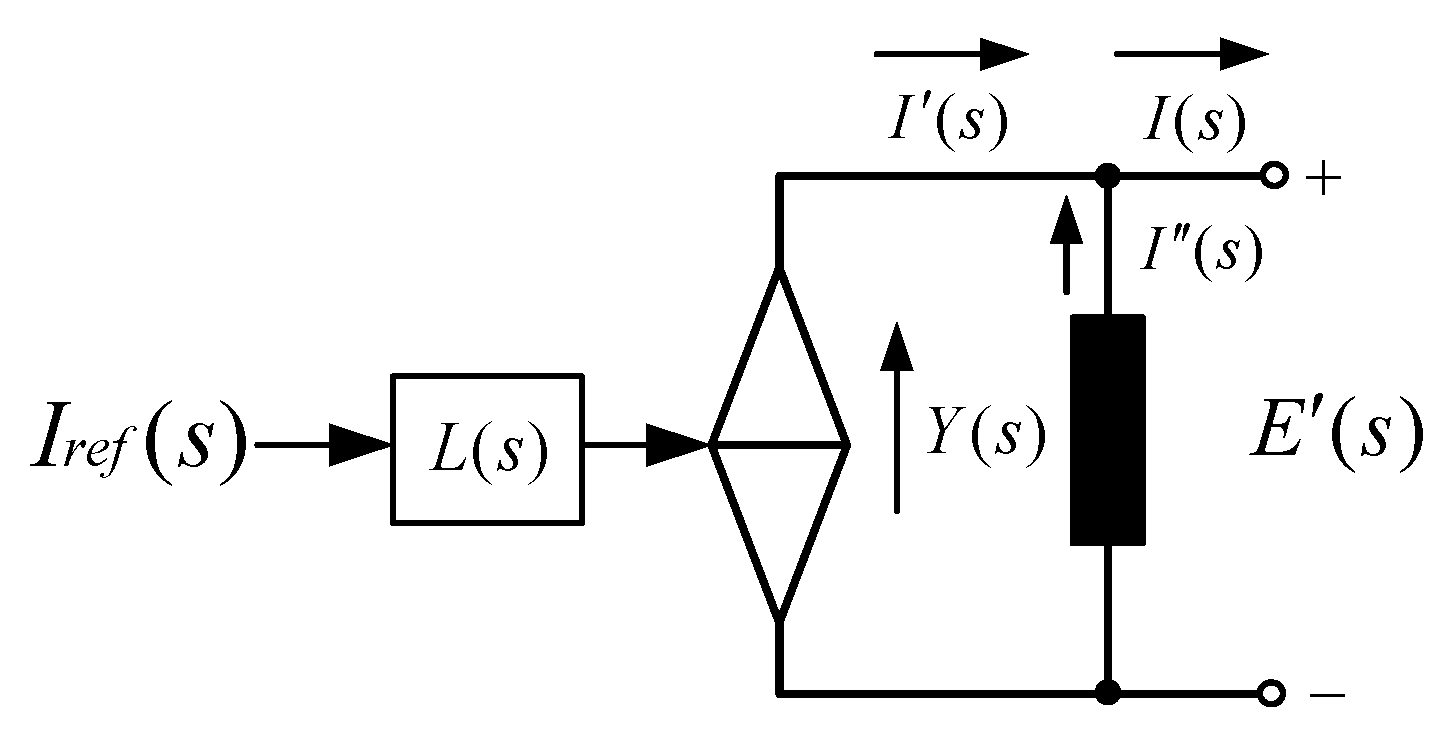
L(
s) is the controllable current source gain;
Y(
s) is the current-loop admittance;
Ci(
s) is the current-loop controller, such as PR or VPI;
D(
s) is the current-loop disturbance gain; and
P(
s) is the controlled object, such as the
L or
LCL filter. According to Equation (1), the NORTON equivalent model consisting of a controllable current source and current-loop admittance can be obtained from the perspective of circuit port equivalence, as shown in
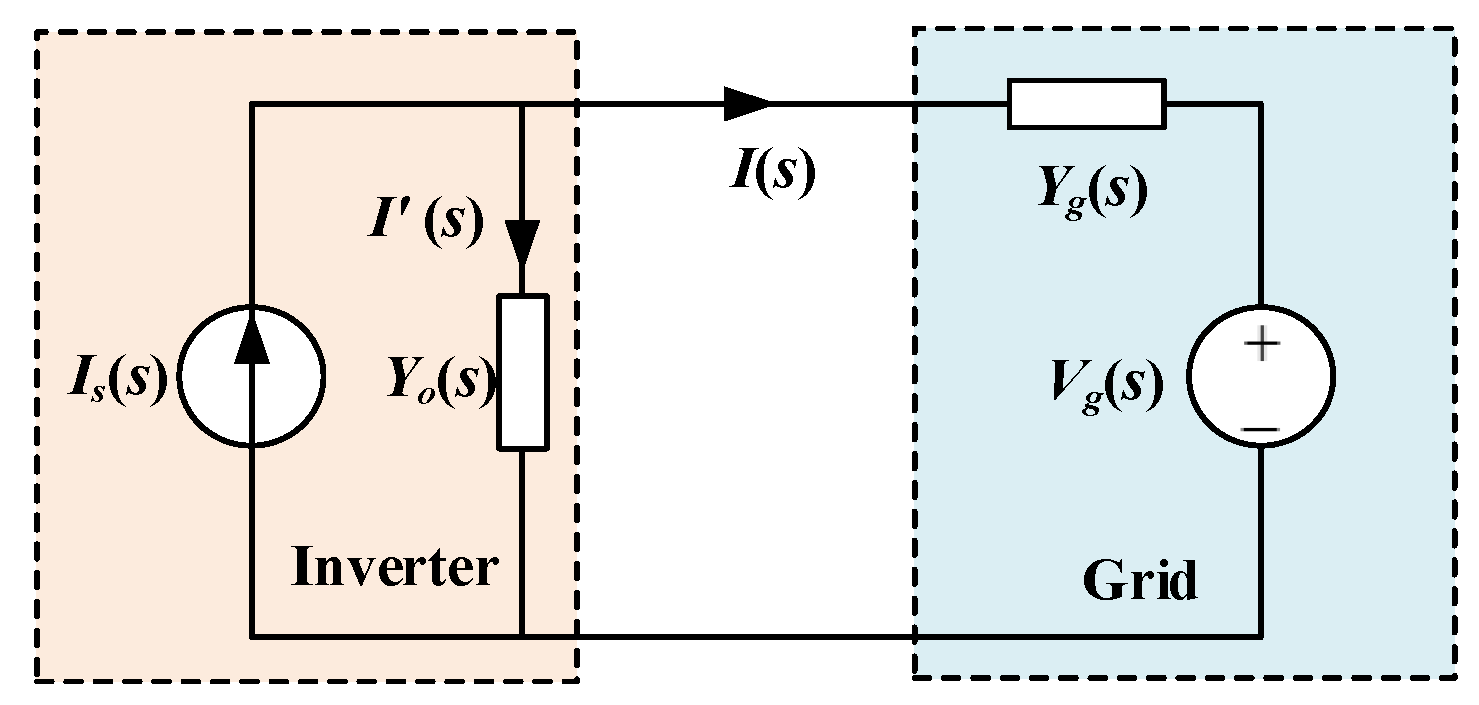
Figure 5. Unlike the current-loop model in block diagram form, that in admittance form can be used to analyze the relationship between the output current and PCC voltage; then, the response expression of each part of the parallel system can be obtained to analyze the stability.
When the
L-type filter and VPI are adopted, the current-loop controller can be represented as expressed in Equation (2).
Km is the equivalent integral coefficient of each resonant frequency;
ωm is the resonant angular frequency;
θm is the resonance frequency compensation angle;
Td is the control system delay; and
L’ and
R’ are the inductance and resistance values set based on the zero-polar offset of the controller and the controlled object, respectively:
Because the VPI controller adopts a zero-polar cancellation strategy, that is, (
L’s +
R’) for the controller and (
L’s +
R) for the controlled object offset each other, the current-loop admittance using the VPI controller is equal to the product of the
P(
s) for the controlled object with the disturbance gain and current-loop gain, as shown in Equation (3):
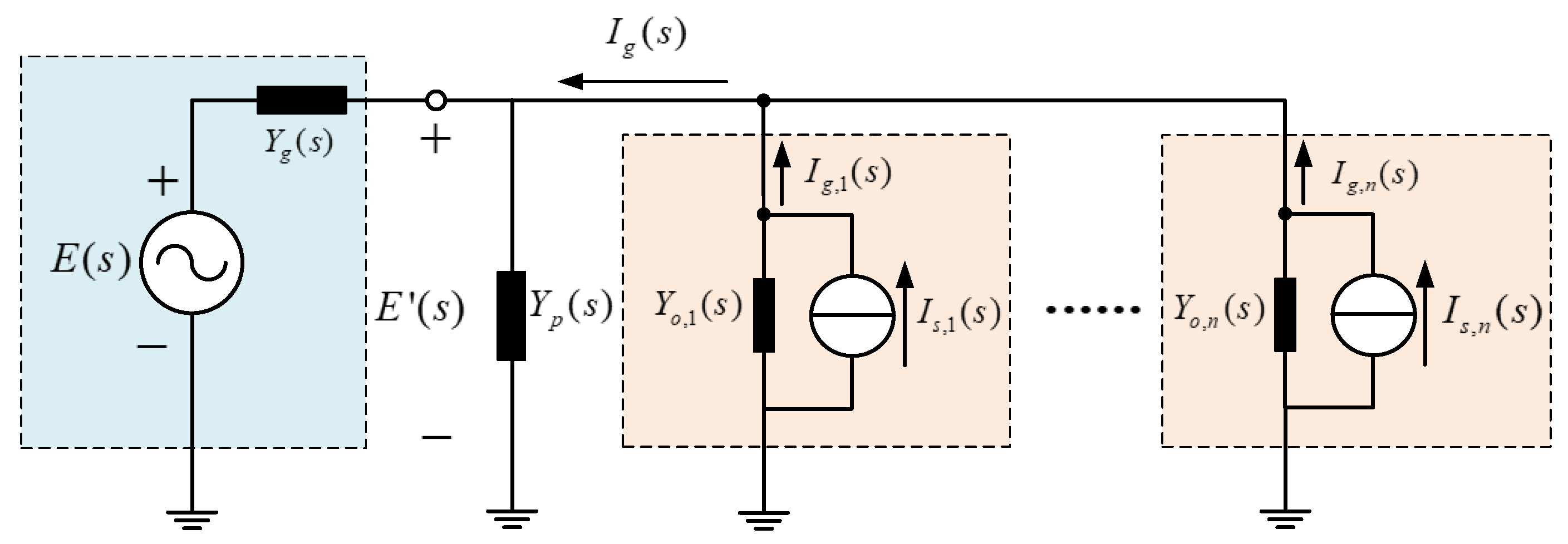
2.3. Admittance Modeling of the VSIs System
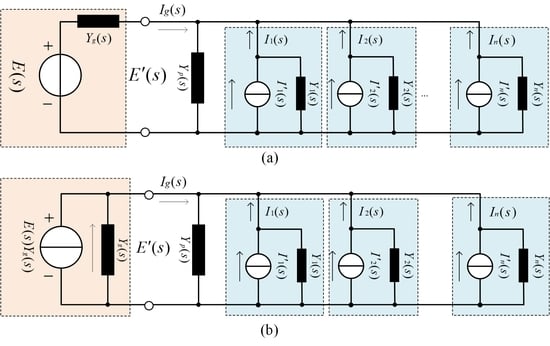
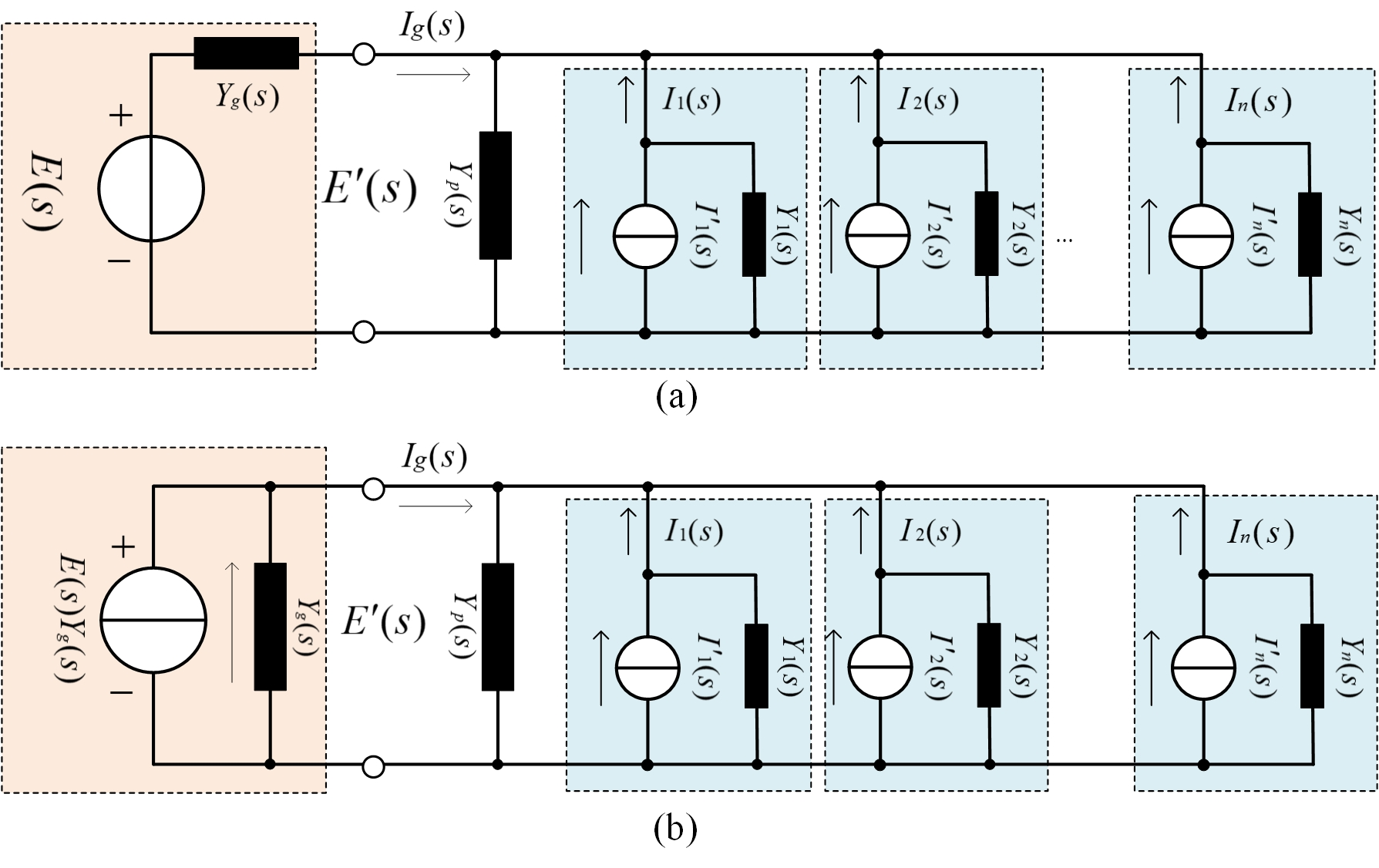
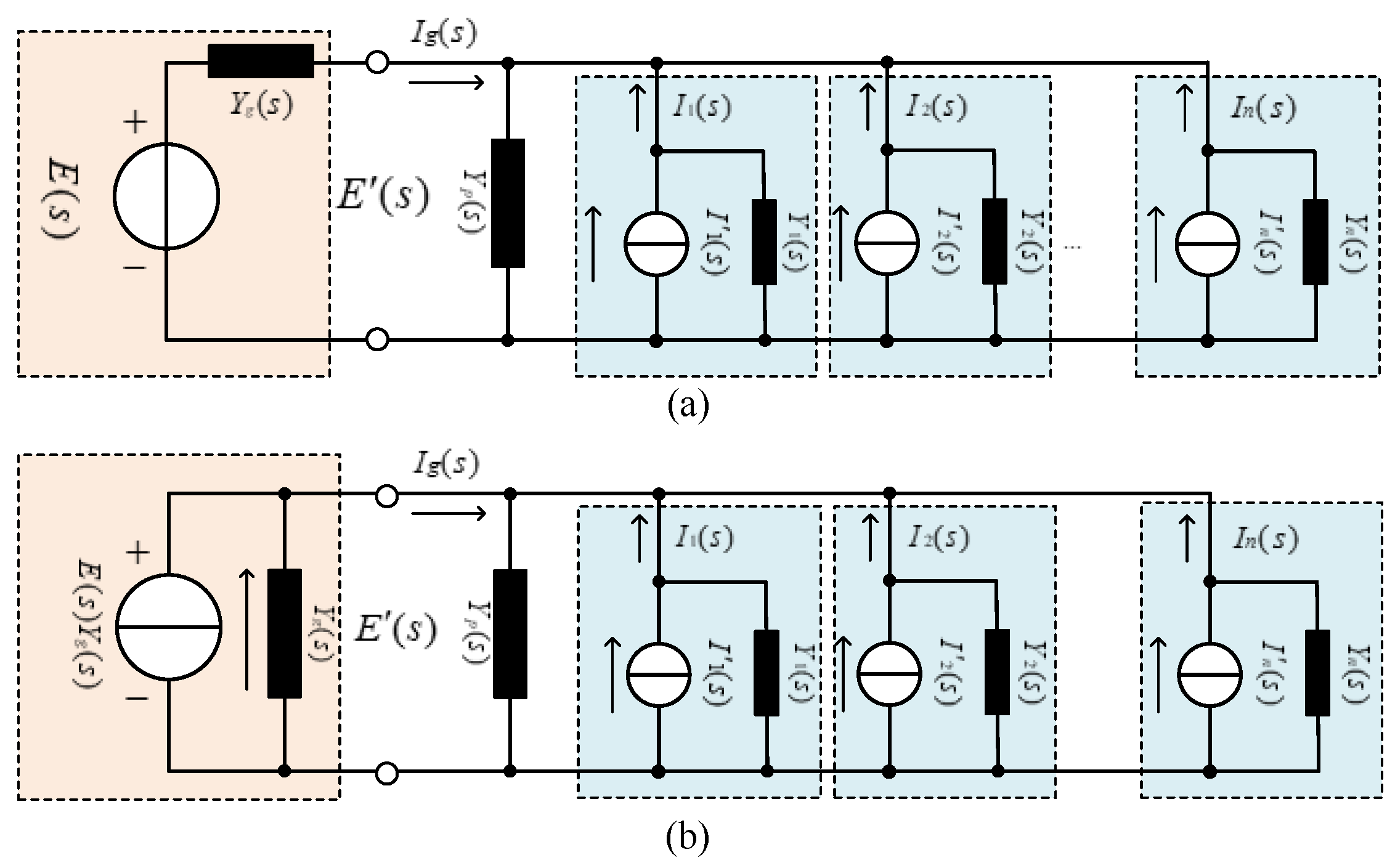
Figure 6a shows the admittance equivalent model of the parallel system.
Yp(
s) is the equivalent admittance of the passive device at the front side of the power grid;
Yg(
s) is the equivalent grid admittance;
Yn(
s) is the current-loop admittance of each module in the parallel system;
I′n(
s) is the equivalent current source of each module; and
In(
s) is the actual output current of each module. To facilitate analysis, the voltage source in
Figure 6a is converted to the NORTON equivalent form, as shown in
Figure 6b. The grid voltage is composed of the equivalent current source,
E(
s)
Yg(
s), and the equivalent grid admittance,
Yg(
s).
According to the superposition principle, the PCC voltage in
Figure 6b can be expressed as follows:
The PCC voltage is obtained through the total excitation and global admittance of the parallel system. The total excitation is determined by the grid voltage, the equivalent grid admittance, and the equivalent current source of each module. The global admittance is composed of the equivalent grid admittance, the equivalent admittance of the passive device, and the equivalent admittance of each module. The influence of grid impedance on the coupling relationship can be analyzed based on Equation (4). When the grid is strong, the grid impedance is close to 0, and the PCC voltage and equivalent current source of each module have no coupling relation; when the grid is weak, the grid impedance cannot be ignored and it constantly changes, and the equivalent current source of each module is coupled with the PCC voltage through the grid impedance.
4. The Proposed Global Admittance-Based Stability Criterion
4.1. Description of the Basic Principle
The argument principle indicates that when considering a clockwise closed contour, C, in the complex plane mapped through a complex function, G(s)(), the difference between the number of zeros, Z, and poles, P, of G(s) encircled by C is equal to the number of times that the plot of G(s) encompasses the origin clockwise.
The Nyquist criterion is derived from the argument principle. Assuming that the transfer function of a closed-loop system is as follows:
where
G(
s)
H(
s) is the system open-loop transfer function and
H(
s) is the negative feedback function. Defining
D(
s) = 1 +
G(
s)
H(
s), the poles of
D(
s) are the poles of
G(
s)
H(
s), and the zeros of
D(
s) are the poles of
F(
s) The closed-loop system will be stable if all the poles of
F(
s) are located in the left half of the panel. In other words, there are no closed-loop poles located in the right half of the panel.
The Nyquist contour, Γ
s, is a contour that encircles the right half of the complex plane in a clockwise direction. According to the argument principle:
where
Z is the number of unstable closed-loop poles (zeros of
D(
s)),
P is the number of unstable open-loop poles (poles of
D(
s)), and
N is the number of times
D(
s) encircles the origin clockwise, which is equal to the number of times
G(
s)
H(
s) encircles (−1,
j0) clockwise. The closed-loop system is stable, i.e.,
Z = 0, when
N = −
P.
Global admittance,
Ytotal(
s), is defined as the summation of all the admittances, including the grid admittance, other passive admittances, and output admittances of inverters. Thus, global admittance can be expressed as follows:
Based on the admittance model of a multi-parallel VSI grid-connected system, as shown in
Figure 6, the output current,
Ig,i(
s), of the
ith inverter can be calculated as follows:
It can be seen from Equation (13) that Ig,i(s) depends on three different excitations, namely, the reference current of the ith inverter, the reference currents of other inverters, and the grid voltage.
The total amount of current from all inverters to the power grid is derived as follows:
Because Yg(s) and Yp(s) are the transfer functions of passive components, they have no right half panel poles. Based on the condition that both the unloaded inverters and grid voltage are stable, Yo,i(s), Is,i(s), and E(s) have no right half plane poles either. Thus, the impact of the numerators in Equation (13) can be neglected when assessing the current stability, and the stability of Ig,i(s) only depends on 1/Ytotal(s); specifically, it depends on the locations of Ytotal(s) zeros.
4.2. The Proposed Stability Criterion
The global admittance-based stability criterion is proposed to assess system stability through the distribution of the zeros of Ytotal(s). The system will be stable only and if only all the zeros of Ytotal(s) are located in the left half panel. An improved Nyquist criterion is proposed to assess the distribution of Ytotal(s) poles. The Nyquist contour, Γs, is still a contour that encircles the right half of the complex plane clockwise. Based on the argument principle, the difference between the zeros and poles of Ytotal(s) in the right panel can be obtained by the number of times that the clockwise Nyquist curve of Ytotal(s) encircles the origin (0, j0). As mentioned above, Yg(s), Yp(s), and Yo,i(s) all have no right half panel poles; thus, Ytotal(s) has no right half panel poles either. Consequently, the number of laps is equal to the number of right half panel zeros of Ytotal(s). The grid-connected system is stable if and only if the Nyquist curve of Ytotal(s) does not encircle the origin (0, j0).
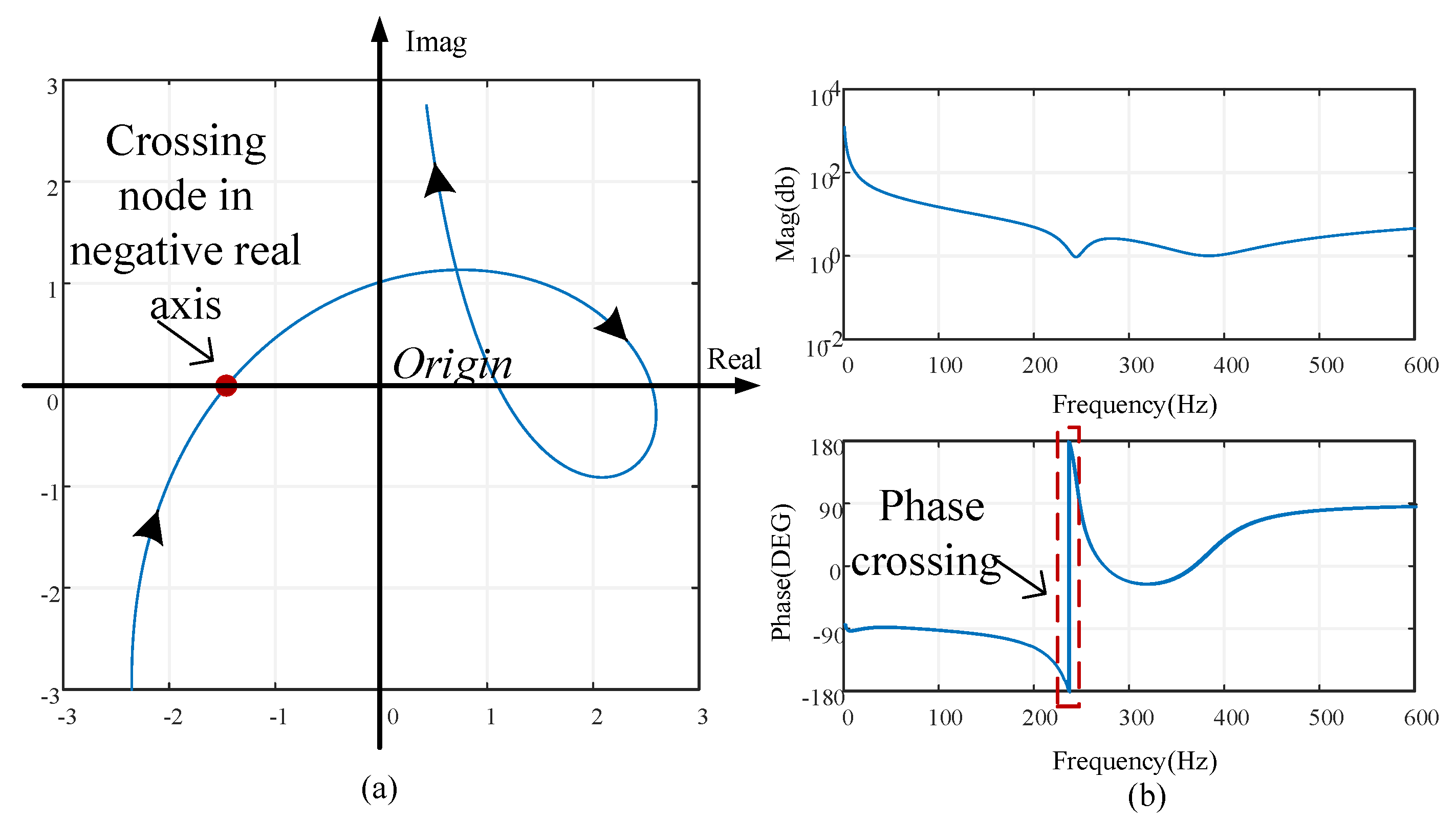
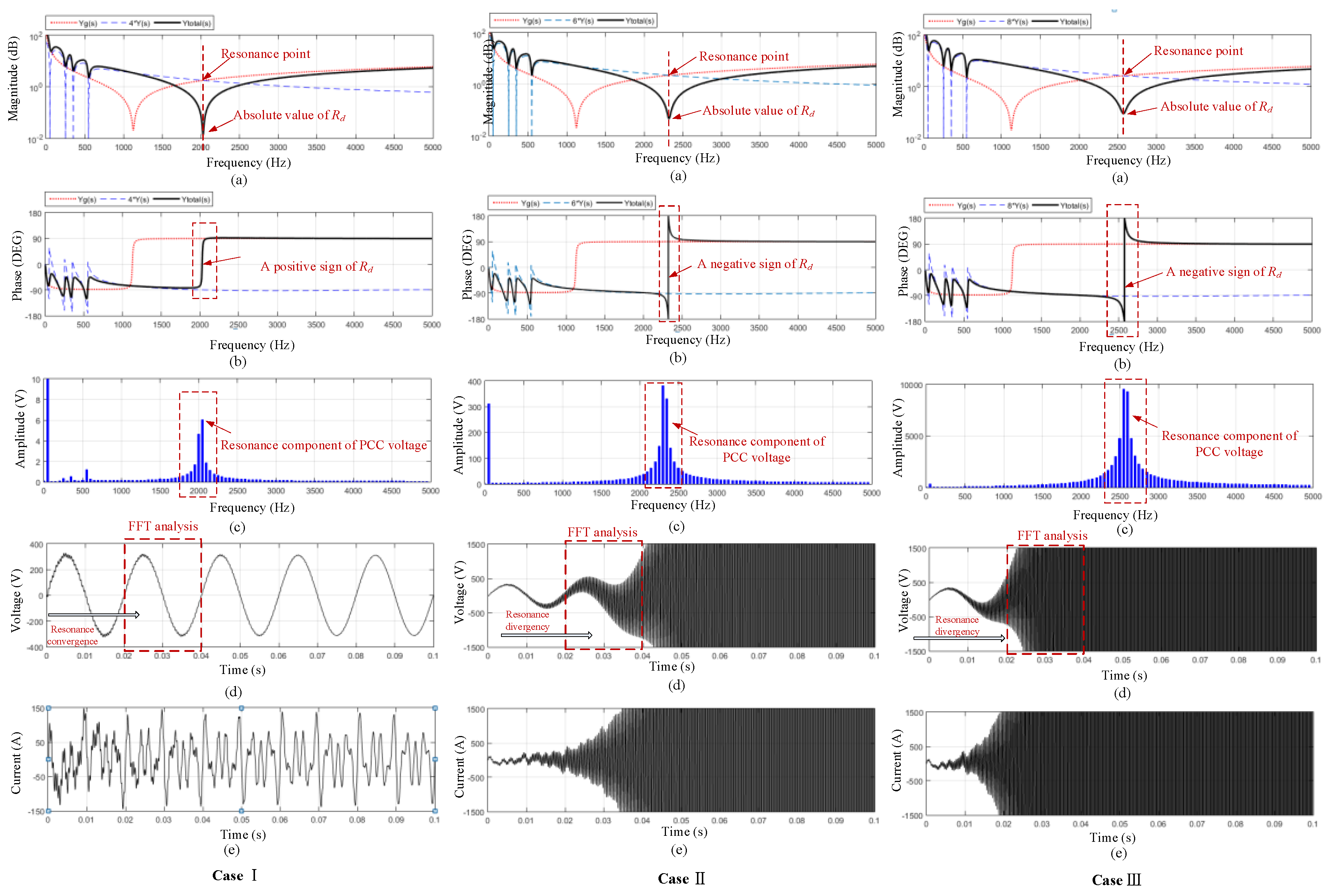
Figure 9 shows Nyquist and Bode plots of
Ytotal(
s) for an unstable grid-connected system.
Figure 9a shows that the Nyquist plot of the unstable system encircles the origin, meeting the improved Nyquist stability criterion. There are multiple intersection points of the Nyquist plot and the real axis; these points are defined as resonance points that determine the system resonance state. The real part of a resonance point is defined as the resonance damping factor,
Rd, where:
If the minimum
Rd is negative, the Nyquist plot encircles the origin (0,
j0), reflecting an unstable system. By contrast, if the minimum
Rd is positive, this means no encirclement around the origin (0,
j0), and the system is stable. The larger the minimum
Rd value is, the more stable the system. The authors of [
30] proposed a passivity-based stabilization approach for a grid-connected system in which the output admittances of inverters are required to have positive real parts at full frequency. This approach sacrifices the bandwidth of the controller in the purist of stability, and the dynamics of the controller are weakened because of the reduced bandwidth. However, the global admittance-based criterion indicates that the grid-connected system is stable if and only if all the resonance points of
Ytotal(
s) are located at the right half panel instead of the output admittance of each inverter with a positive real part. Therefore, the bandwidth of the controllers can be designed in a wide frequency domain. Consequently, the dynamics of the inverters can be improved.
Figure 9b shows that the existence of a negative
Rd mapped from the Nyquist plot to the Bode plot reflects a step change from −180 to 180° in the phase frequency response curve. Thus, the grid-connected system stability can be predicted based on the Bode plot of
Ytotal(
s). Compared to the stability criteria proposed in [
28,
29], global admittance is given in summation form in this case instead of ratio form; this approach not only reduces the computational burden but also reveals the influence of each component on system stability.
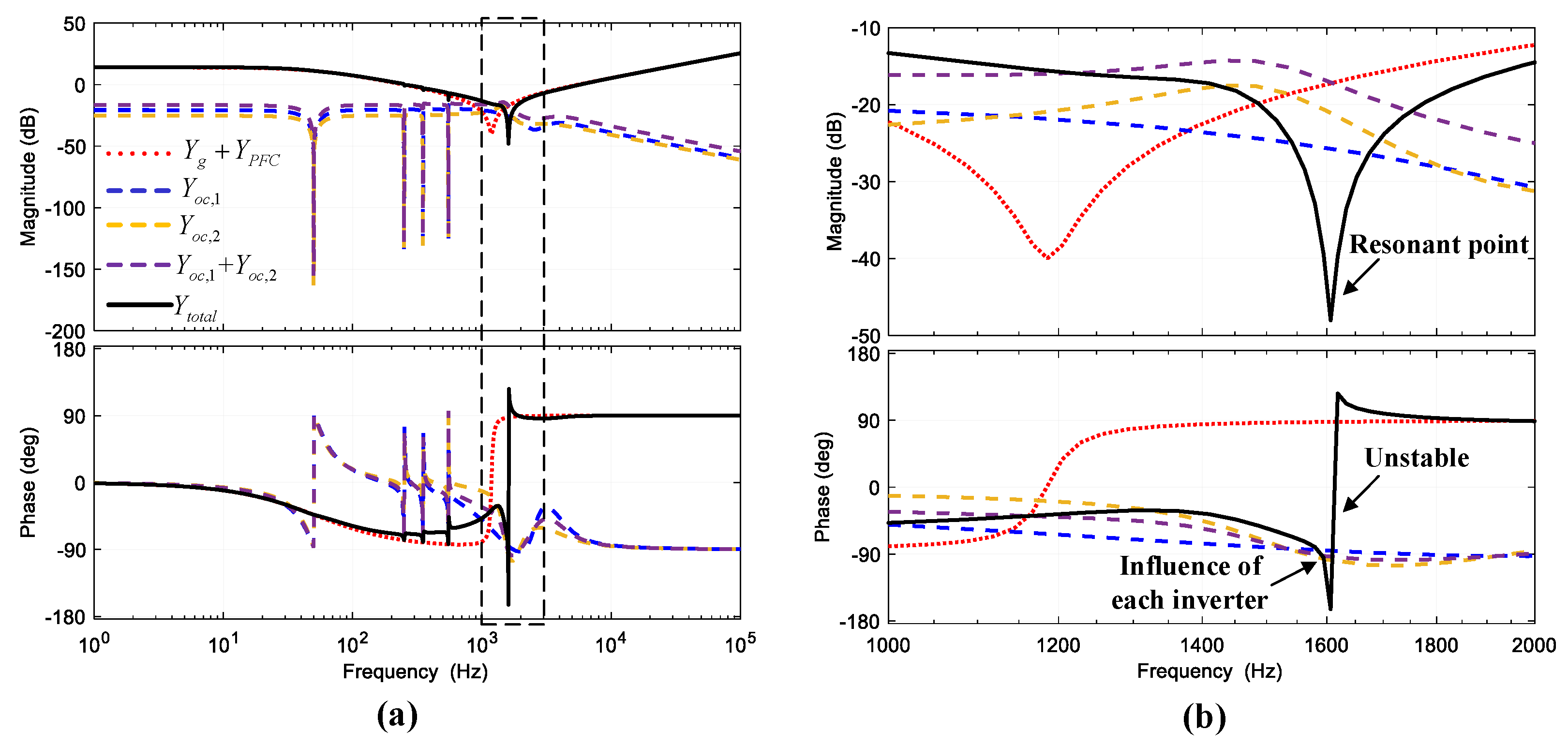
4.3. Discussion of the Case in which the Parameters are Different
The system stability analysis when inverters with different parameters are connected to the grid is shown in
Figure 10 (the parameters are shown in
Table 2). It is clear that the system is unstable. Notably, there is a step change from −180 to 180° in the phase frequency response curve of
Ytotal at the resonance point, which is approximately 1600 Hz. The phase of each inverter output admittance is different, which means that the influence of each inverter on system instability is different. The real part of the output admittance of each inverter is shown in
Table 3, where
Rd,1,
Rd,2, and
Rd,p are expressed in Equations (16) to (18) and the relationship between these variables and
Rd is expressed in Equation (19). The real part of the output admittance of inverter 1 at the resonance point is positive, and that of inverter 2 is negative, which implies that inverter 2 is responsible for the system instability.
The global admittance-based method together with methods using MLGi and GMLG can be used to concisely and accurately make predictions involving interconnected systems. However, the global admittance-based method can clearly and directly reveal the effects of each component. In addition, the global admittance-based method provides a simple and efficient stability-oriented design.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}