1. Introduction
We are interested in delta control algorithms, as defined by
Table 1 in reference to the notation used by Aho et al. [
1], because they are used by several authors for frequency control [
2,
3,
4,
5,
6,
7,
8]. Given a de-rating command
[
1], the wind turbine operates with a power reserve given by
Table 1.
In Mode 1, a power limit proportional to rated power
is set:
. In practical terms, available power
is the power the turbine can generate in normal operation given the wind conditions. If
is larger than
, a power reserve of
exists. However, said reserve is not controlled, and therefore, Mode 1 is not normally referred to as delta control [
9]. We call it power limitation, after Kristoffersen [
9].
In Mode 2, the power reserve is actively controlled so that it remains constant at
. Obviously, this is only possible as long as
. This is referred to by Kristoffersen as delta control [
9]. Since, for a given value of
, the desired power reserve
is constant in Mode 2, we call it constant delta control, to distinguish it from Mode 3.
In Mode 3, the power reserve is actively controlled so that it remains proportional to available power, with factor . We therefore call it proportional delta control.
Proportional delta control has been extensively discussed in the literature. Early works, such as that of Ramtharan et al. [
10], modified the maximum power point tracking (MPPT) generator speed-torque curve to track a known, sub-optimal power coefficient. This results in operating points within the turbine’s variable speed range moving to considerably higher speeds, as explained by Aho et al. [
1]. A number of authors have adopted the same approach [
11,
12,
13] and recognized that the power reserve is limited by the maximum allowable generator speed. Other authors have proposed a simple extension to the modified MPPT curve, to achieve proportional delta control via a combination of generator speed and blade pitch angle modifications [
14]. This allows precise control of the tip-speed ratio
and the blade pitch angle
at different de-rating command values, which is relevant to turbine dynamics and loads [
14,
15,
16,
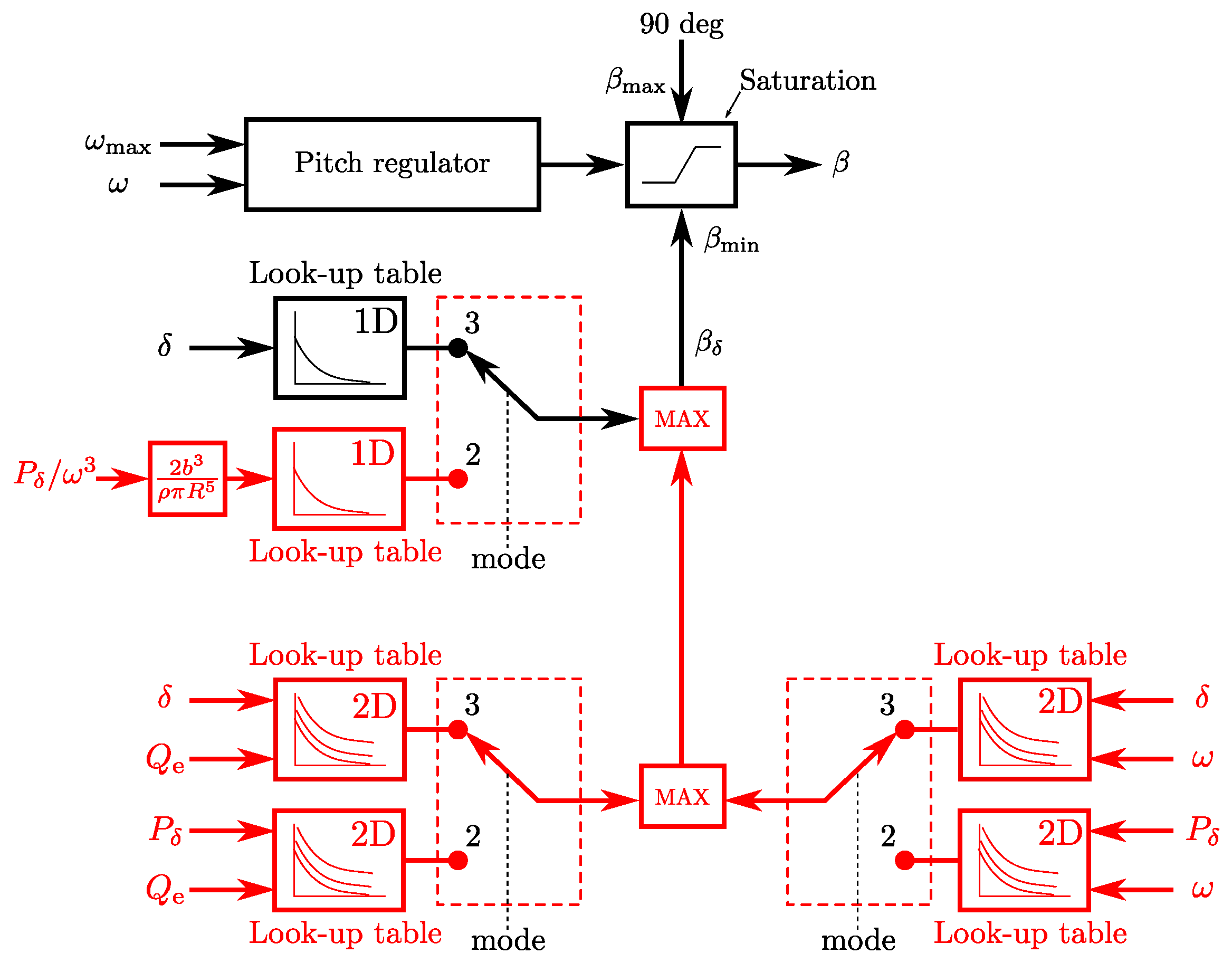
17]. Its implementation is rather simple, as shown by
Figure 1 and
Figure 2, where the two black 1D look-up tables are sufficient. However, as explained in
Section 4.2 and
Section 4.3, methods based on the MPPT curve are no longer viable when generator speed or torque limits are reached. Here, we propose an extension to said methods, which overcomes said difficulty. It is also shown by
Figure 1 and
Figure 2, in red. Note that it only requires two extra 2D look-up tables for proportional delta control (Mode 3), both affecting the minimum pitch on
Figure 2.
Constant delta control is typically pursued via estimation of available power. This requires direct measurement of wind speed [
18] or estimation thereof [
1,
19], with suitably slow estimator dynamics [
1]. This may be considered a drawback [
20]. However, an alternative exists along the lines of MPPT curve modification typical of proportional delta control techniques. Janssens et al. used a 2D look-up table [
21], which gave the generator power based on the generator speed and the de-rating command. This is equivalent to substituting a 2D look-up table for the red one in
Figure 1. In
Section 5, we simplify this to a 1D look-up table (as shown in
Figure 1) and extend it to allow control over
and
, as in proportional delta control (for this, we use the red 1D look-up table in
Figure 2). We then extend it further to overcome generator speed and torque limitations, with the two 2D look-up tables for constant delta control (Mode 2) in
Figure 2.
Section 2 reviews previous work cited here.
Section 3 presents the control algorithm we wish to extend, which we subsequently extend for proportional and constant delta control in
Section 4 and
Section 5, respectively, on a control-region-by-control-region basis, i.e., assuming that operating points within each region (variable speed and torque, constant speed, constant torque) remain in said region regardless of the power delta. Since this is not always the case,
Section 6 describes the method used here to produce look-up tables valid for any wind speed. A set of look-up tables thus produced has been used to carry out the simulations presented in
Section 7 as a proof of concept. Further discussion and a detailed description of the materials and methods follow in
Section 8 and
Section 9, respectively.
3. Torque and Pitch Control
Following Jenkins et al. [
26], we consider a base turbine controller with two generator speed regulators, e.g., PI controllers, one of which modifies the blades’ collective pitch angle,
, while the other one modifies the generator torque
.
The generator speed setpoint for the pitch controller,
, was always the maximum operating speed,
. The lower pitch angle saturation limit is:
where
is chosen to maximize the power coefficient; we use subscript
, rather than the more usual “opt” because we will use this torque for delta control in
Section 4 and
Section 5.
On the contrary, the generator speed setpoint for the torque controller,
, is switched between
and the minimum operating speed,
. The choice between the two is made based on the proximity to the actual generator speed,
, and the generator torque saturation limits,
and
, are chosen so that:
where
is the rated power, while
is a function of
, which is chosen to make the tip-speed ratio converge to its optimal value; again, we used subscript
rather than “opt”.
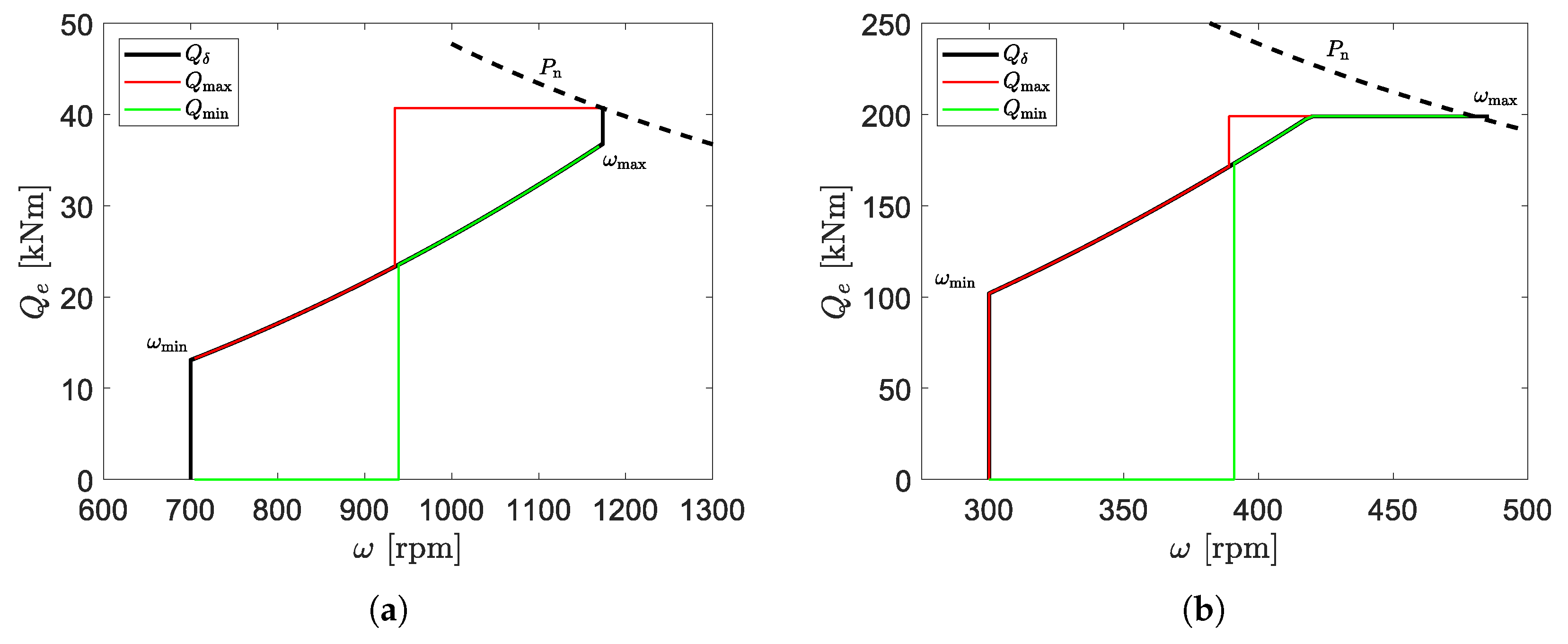
Figure 3 shows
,
,
and
for two popular reference wind turbines.
3.1. Operation at Optimal Tip-Speed Ratio
The choice of
is well established, e.g., in [
27]. It is based on the following simple turbine model:
where
J is the rotor inertia (including the hub, drivetrain, and generator rotor),
b is the gearbox ratio,
is the aerodynamic torque, and
is the torque due to mechanical losses.
The available aerodynamic power is:
where
,
R, and
U are the air density, rotor radius, and wind speed, respectively, while
and
are the tip-speed ratio and blade pitch angle, respectively, for which the power coefficient
is the greatest. Operating at
is trivial; one need only choose
. However,
cannot be directly manipulated, or indeed measured, since it is defined as follows:
When operating at
, but in general,
, the aerodynamic torque is:
Using (
6), we may rewrite (
7) thus:
Note from (
4) and (
8) that
becomes a fixed point if we choose:
Equation (
9) is the most common MPPT algorithm for variable-speed wind turbines [
26]. It is also interesting to know whether (
4), (
8), and (
9) lead to
being asymptotically stable. To find out, we use (
6) to rewrite (
4), (
8), and (
9) thus [
27]:
We then choose the following Lyapunov function candidate:
The derivation of (
11) w.r.t. time and substitution of (
10) yield:
From (
12), the fixed point
is asymptotically stable if:
The fulfillment of these conditions may easily be verified from a turbine’s power coefficient curve, as shown by
Figure 4 for two popular reference turbines.
The choice of
is therefore based on (
9), i.e.,
Note from (
2), (
3), and (
14) that (
9) is fulfilled as long as
lies within
, and
, because
saturates at
.
3.2. Operation at Constant Rotor Speed
Once
or
is reached, it is no longer possible to operate the turbine at
. The tip-speed ratio at which the turbine operates now,
, is determined by wind speed
U, thus:
where
is either
or
.
It is still possible, however, to choose the pitch angle, , which also influences efficiency. We are therefore interested in finding , the optimal pitch angle for the tip-speed ratio at which we are forced to operate.
When operating at
, the aerodynamic torque is:
In steady state, (
4) and (
16) become:
We propose the use of a look-up table giving
as a function of
, to set the minimum pitch saturation limit. The choice of
is, therefore, made as follows:
Figure 5 shows the
curves for two popular reference turbines. To calculate them, we have used Algorithm 1 for the range of wind speeds between cut-in and rated. As a result, we have two vectors for each turbine, one with pitch angles and the other with the corresponding torque values. This constitutes a usable look-up table.
| Algorithm 1 Calculate the look-up table. |
- 1:
Choose a wind speed U. - 2:
From U, calculate via ( 15). - 3:
From U, and , calculate for via ( 17).
|
3.3. Operation at Constant Generator Torque
Larger, more powerful wind turbines operate at lower rotor speeds and, therefore, at higher torques. This may result in a turbine’s torque limit being reached before its rotational speed limit, when operating at the optimal tip-speed ratio. Such is the case, for example, of the DTU 10-MW reference wind turbine [
28], if operated in “constant torque control” mode, as described in [
29]. As a result, there exists a wind speed range, just below rated, in which the turbine operates at constant generator torque
, yet at
and
. Then, instead of (
17), we have:
From (
6) and (
19),
and because the power output is
, we are interested in solutions of (
20) that maximize
and, therefore,
. Note that this is equivalent to maximizing
, for every given value of
, and therefore, we are interested in using
, i.e., the optimum pitch angle for a given tip-speed ratio.
We propose the use of a look-up table giving
as a function of
, to set the minimum pitch. The choice of
is, therefore, made as follows:
Figure 6 shows the
curves for two popular reference turbines. To calculate them, we have used Algorithm 2 for the range of tip-speed ratios between cut-in and rated. As a result, we have two vectors for each turbine, one with pitch angles and the other with the corresponding generator speed values. This constitutes a usable look-up table. Note, from
Figure 3a, that the NREL 5-MW reference turbine does not operate at constant torque, so
Figure 6a is constant at
for all
.
| Algorithm 2 Calculate the look-up table. |
- 1:
Choose a tip-speed ratio . - 2:
From , calculate wind speed U for via ( 20). - 3:
From U and , calculate via ( 6).
|
3.4. Operation at Constant Generator Power
Power limitation at rated power is often part of the torque and pitch control described in
Section 3.1. It is simply implemented by modifying (
2) and (
3) thus [
1]:
where we have generalized
to any power setting
.
Note that the dynamics are the same as in
Section 3.1 for
, i.e., at wind speeds insufficient to reach the power setting. However, at higher wind speeds, we have, instead of (
9),
From (
4), (
6), (
7), and (
24),
Equation (
25) has a fixed point at
and
, which satisfies:
Note that
, because, although (
26) has another solution at
, it corresponds to generator speed
, for which
, and therefore, (
24) does not apply.
We are, again, interested in the stability of the fixed point at
, so we choose the following Lyapunov function candidate:
Derivation of (
27) w.r.t. time and substitution of (
25) yield:
From (
28), the fixed point
is asymptotically stable if:
and:
Conditions (
29) are always satisfied for any
, and so are normally conditions (
30) for any
.
6. Look-Up Table Calculation
We have discussed, in
Section 4, a proportional delta control method based on two 1D look-up tables (for
and
, respectively) within the unconstrained generator speed and torque operating region (which coincides with the region of optimal tip-speed ratio when
) and two 2D look-up tables (for
and
, respectively) for the generator speed- or torque-constrained operating regions. This description also applies to the constant delta control method discussed in
Section 5, with
instead of
. There are, however, some wind speeds, near the boundaries between said operating regions, at which a wind turbine will operate in a different region depending on
or
.
Consider, for example, a turbine that does delta control via over-speed, as is the case of the NREL 5-MW reference turbine here, as shown by
Figure 7a. Consider also a wind speed at which said turbine operates at generator speed
when
. Then, there is a
over which said turbine, at said wind speed, must operate at generator speed
. If the pitch angle is such that, at said generator speed,
, then power output will be more than
-times the power output at
, because
at generator speed
for any
.
The same thing happens to all over-speed-based delta control methods, which always run into
for large enough
, where no more over-speed is possible. Pitch-based delta control is necessary then (hence, for example, Ramtharan et al.’s four degree pitch offset [
10]).
In this section, we will discuss a method to calculate the look-up tables introduced in
Section 4 and
Section 5 so that they are valid for any wind speed, regardless of the operating point moving between regions, as just described. The method is described by Algorithm 8.
| Algorithm 8 Calculate the look-up tables. |
- 1:
Choose a wind speed U. - 2:
From U, calculate generator speed for via ( 6). - 3:
Limit to ensure that . - 4:
For U and , calculate tip-speed ratio via ( 6). - 5:
Calculate power coefficient thus: , i.e., the optimum power coefficient given the tip-speed ratio. - 6:
Calculate generator torque thus: . - 7:
Limit to ensure that . - 8:
Re-calculate thus: . - 9:
Re-calculate as in Step 5. - 10:
Calculate power output P thus: . - 11:
- 12:
Re-calculate thus: , where may be chosen freely, as discussed in Section 4. - 13:
From U and , re-calculate via ( 6). - 14:
Limit as in Step 3. - 15:
Re-calculate as in Step 6. - 16:
Limit as in Step 7. - 17:
Re-calculate thus: . - 18:
From and U, re-calculate via ( 6). - 19:
Calculate pitch angle thus: .
|
Once the steps of Algorithm 8 have been carried out for the range of wind speeds of interest, one is left with three vectors, with the values of
,
, and
corresponding to different wind speeds and one value of
or
. Repeating for different values of
or
, these vectors become matrices, and the 2D look-up tables giving
and
or
and
are ready.
Figure 10,
Figure 11,
Figure 15 and
Figure 16 show said tables for two popular reference turbines.
It is also possible to interpret the results of Algorithm 8 as tables giving
or
, as shown by
Figure 17 and
Figure 18. These are indeed the steady state operating points we expect from the application of the control algorithms described in this paper, but they are not used in said algorithms directly. Instead,
is influenced via
in (
22) and (
23).
is calculated via (
31), which uses
. 1D look-up tables for
and
are given by
Figure 8 and
Figure 12, respectively.
7. Results
In order to preliminarily test the methods proposed in this paper, it is easiest for us to modify a free controller slightly [
30], which we have recently produced for a research project. It was adapted to the DTU 10-MW reference wind turbine [
28]. As a first proof of concept, we carried out some simulations with said controller and turbine model, which had constant speed and constant torque operating regions. This allowed us to assess the performance of all our methods at a glance, provided that we used a wide enough range of wind speeds. Unfortunately, we had no similar code for the NREL 5-MW reference wind turbine [
31], and it would be inefficient for us to produce one at the time of writing.
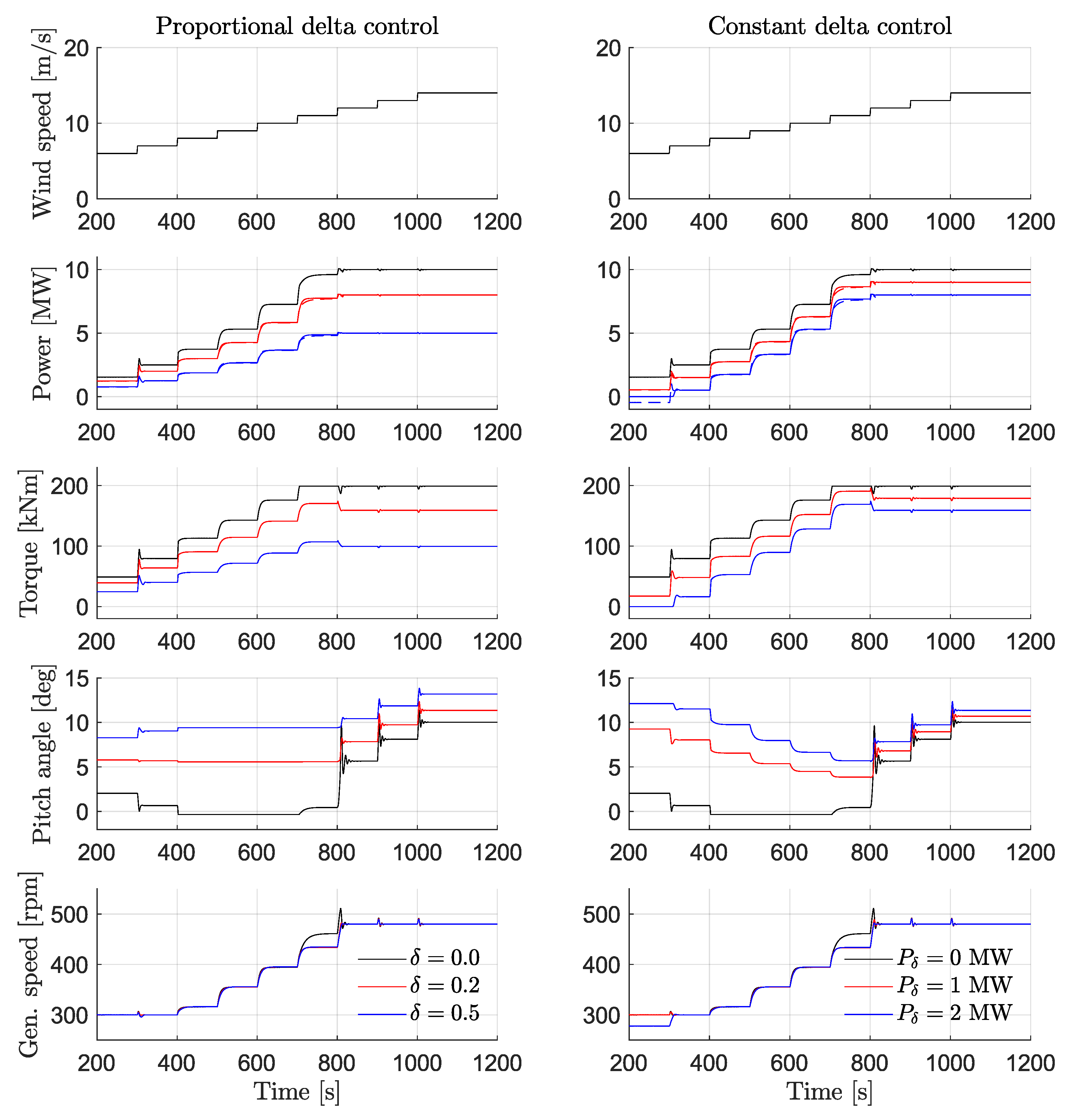
Figure 19,
Figure 20 and
Figure 21 show six FAST [
32] simulations of the DTU 10-MW [
28] reference wind turbine. Three of them were carried out with proportional, the other three with constant delta control. In each case, three different power deltas (including zero) were used. The power output of simulations corresponding to
and
, multiplied by
and minus
, respectively, are plotted in dashed lines for other values of
and
.
In
Figure 19, the wind speed increased suddenly by 1 m/s every 100 s, so we can assess the turbine’s steady state behavior at different operating points. Prior to 400 s, the wind speed was low enough to force the turbine to work at the minimum generator speed (300 rpm). Note that, for
, the generator speed was lower prior to the 300-s mark. This is because the available power was less than
and suggests a further change to the control strategy, as discussed briefly in
Section 8.
Between the 400-s and 500-s marks, the steady-state generator speed remained proportional to wind speed, because the
trajectory on
Figure 7b dictates a constant tip-speed ratio.
Between the 700-s and 800-s marks, the turbine worked at the maximum torque (198 kNm) for and , and the generator accelerated above the optimal tip-speed ratio. After the 800-s mark, the generator worked at the maximum speed for all values of and .
In all cases (except, as already pointed out, when
was larger than available power, prior to the 300-s mark), the delta control behavior was excellent, as indicated by the dashed and continuous lines being very close to each other. However, an appreciable transient error appeared after the 700-s mark, due to the generator accelerating more for
and
than for other values of
and
. This also suggests a further change to the control strategy, as discussed briefly in
Section 8.
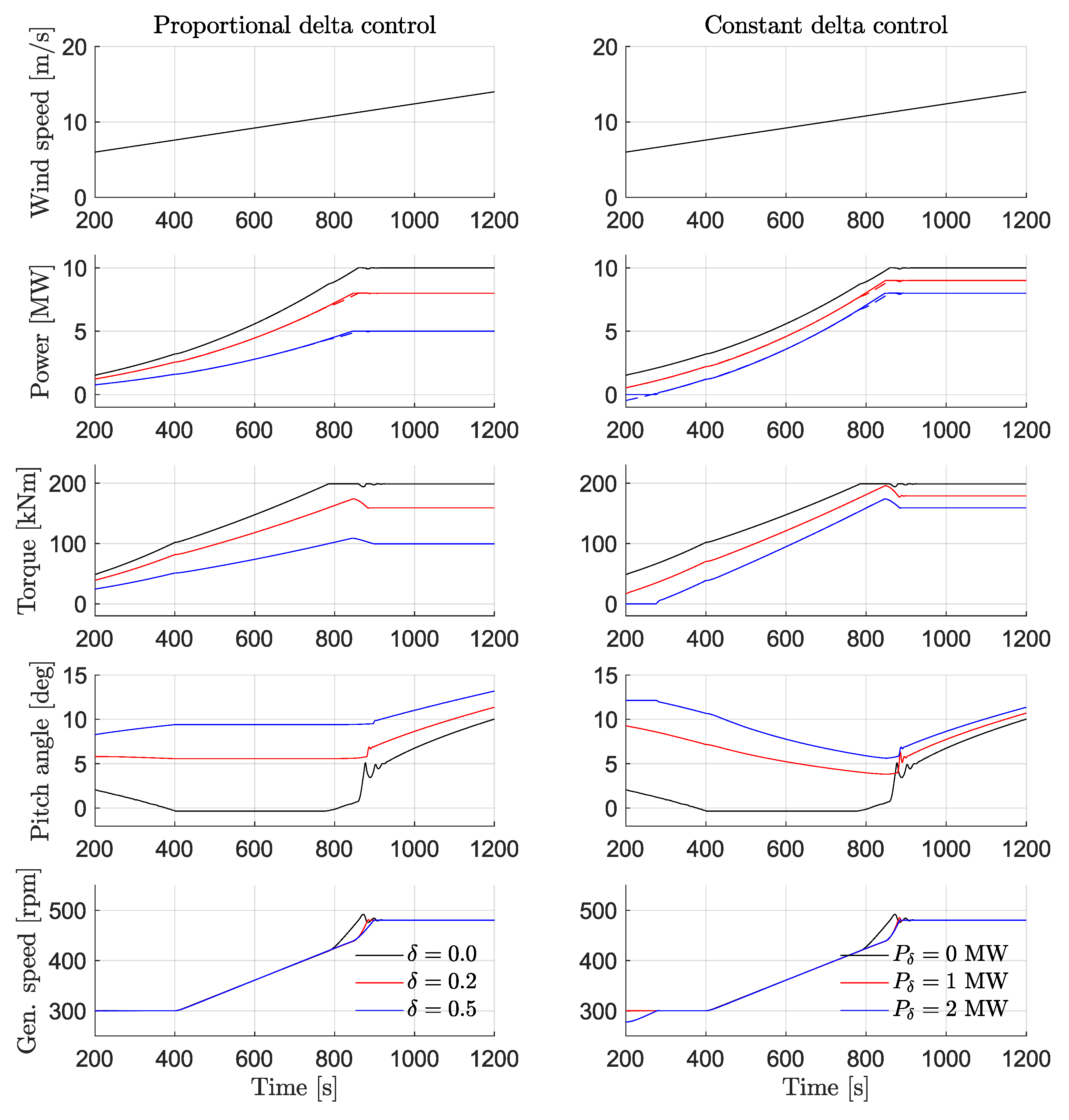
In
Figure 20, the wind speed slowly increased during the simulations, in order to visualize quasi-steady-state turbine behavior easily over a wide range of wind speeds. Again, the delta control behavior was excellent, except for the case of constant delta control at low wind speeds, where not enough aerodynamic power was available for a 2-MW power reserve; as a consequence, power output remained at 0 and generator speed was too low. Note also that, after the 800-s mark, there was an appreciable power delta error. This was because the generator speed was different for different de-rating commands, as was the case between the 700-s and 800-s marks on
Figure 19.
In
Figure 21, a turbulent wind field produced via TurbSim [
33] was used. The mean wind speed was approximately 9 m/s, and the turbulence intensity was 30% (which is considerably larger than the standard [
34]), so that a wide range of wind velocities may be covered within a single simulation. Note that, despite the high turbulence, the delta control behavior remained excellent. Again, as on
Figure 19 and
Figure 20, appreciable transient power delta errors appeared when the
and
simulations reached the maximum torque, due to generator speed being different for different de-rating command values. Additionally, in the
simulation, the controller could not maintain the minimum generator speed when the wind speed was so low that a 2-MW reserve was impossible (around the 500-s mark). As mentioned above, these shortcomings suggest further changes to our delta control technique, which we briefly discuss in
Section 8.
Finally, it is noticeable that the power delta error was slightly larger when the power output was decreasing, while it was practically perfect when the power output was increasing. This may merit further investigation.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}