Suggestion of a New Protection Scheme for a Transmission System Equipped with a Thyristor-Controlled Series Capacitor

 ,
,  ,
, 
Abstract
:1. Introduction
2. The Operating Principle and Parameters of TCSC
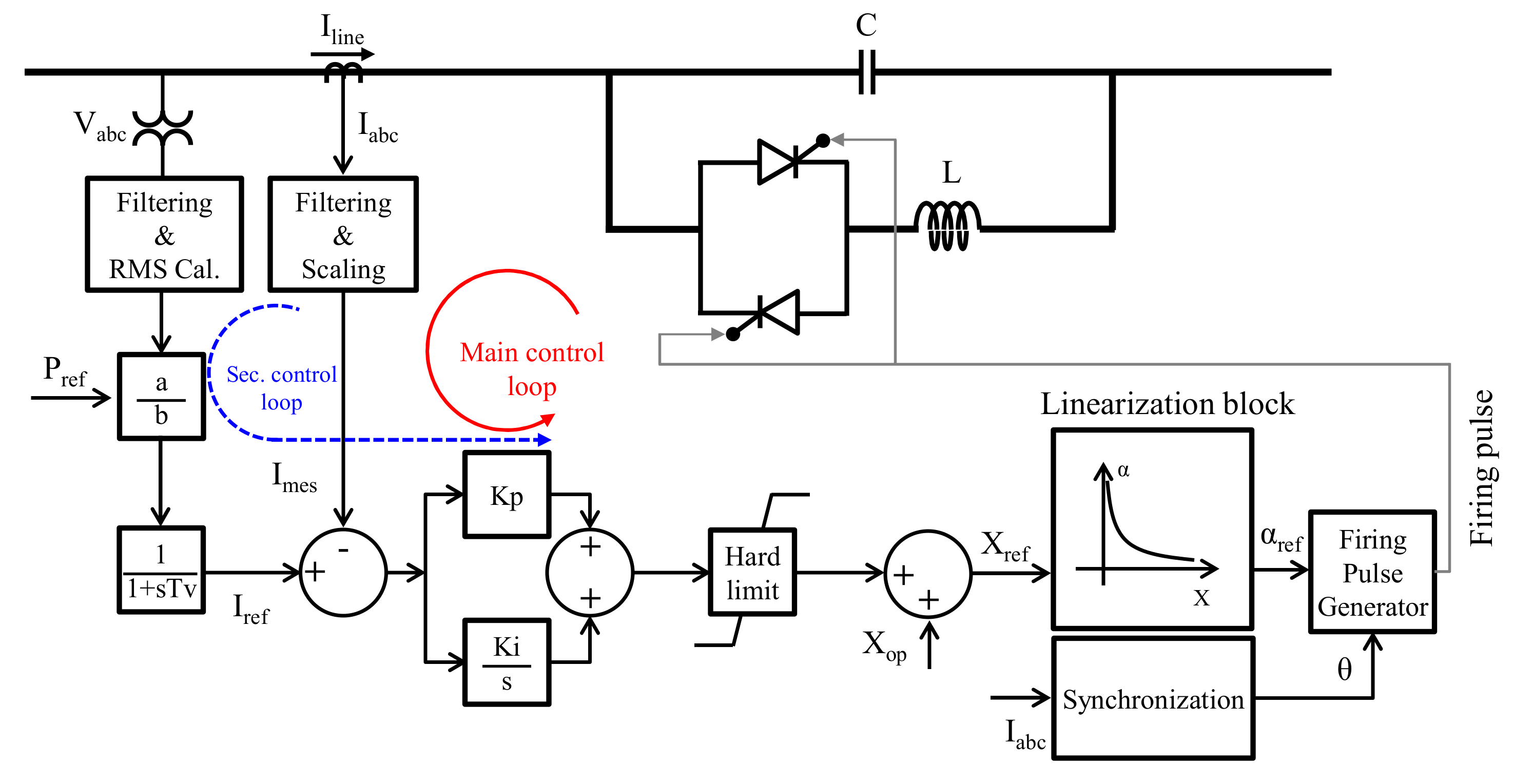
2.1. The Operating Principle of TCSC
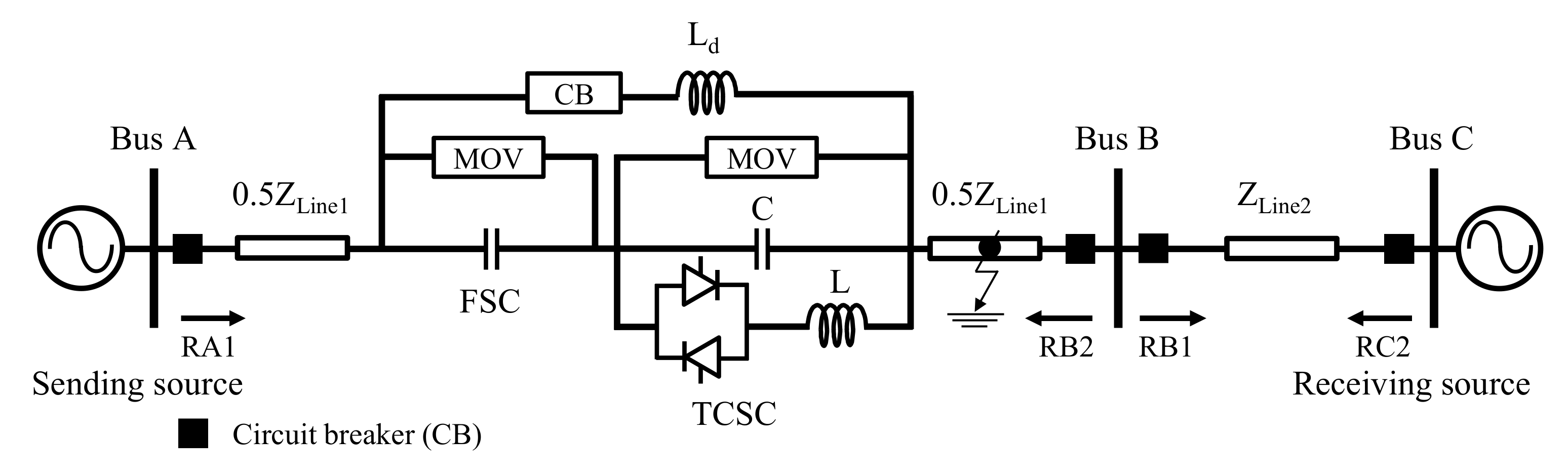
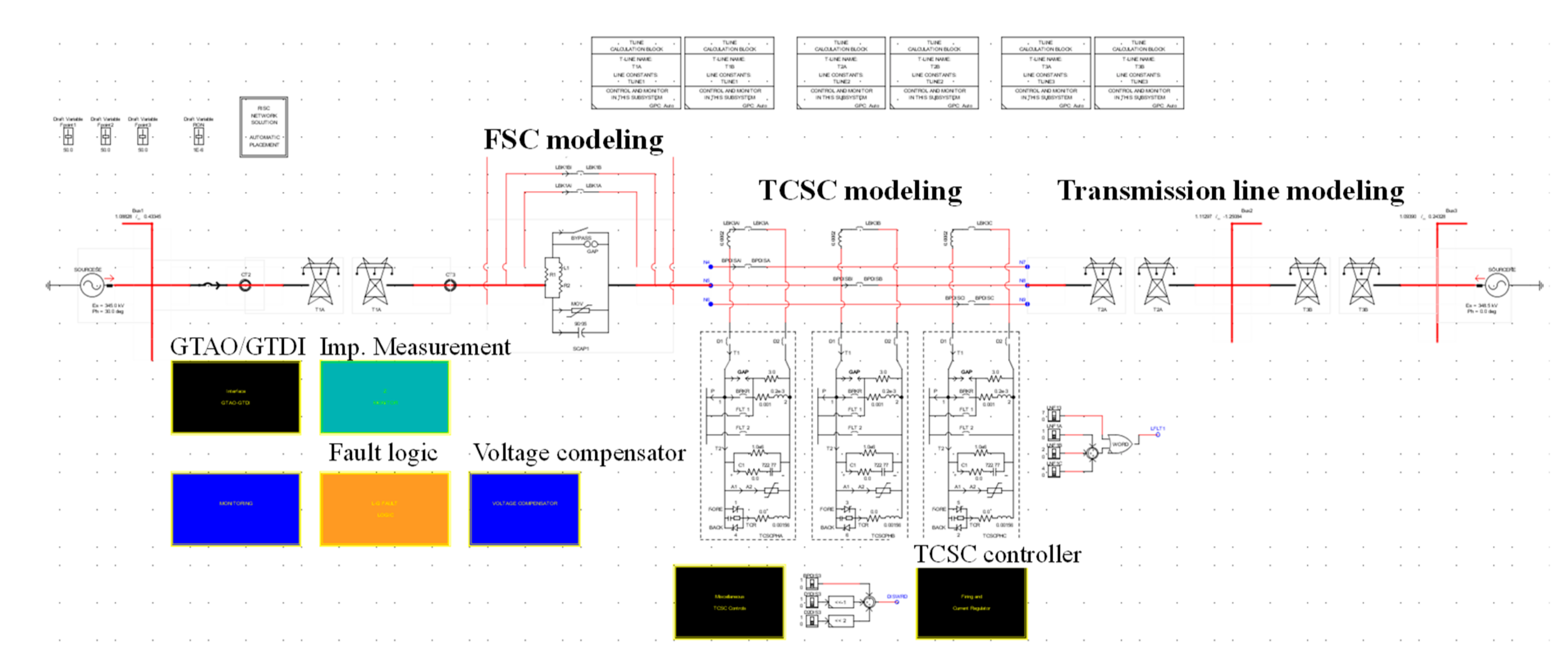
2.2. Configuration of the 345 kV Transmission System equipped with the TCSC
3. Design of New Protection Scheme for the Transmission System Equipped with the TCSC
3.1. The Influence of TCSC on Distance Protection of the Transmission Line
3.2. TCSC Voltage Compensator Scheme for Distance Relays in the presence of the TCSC
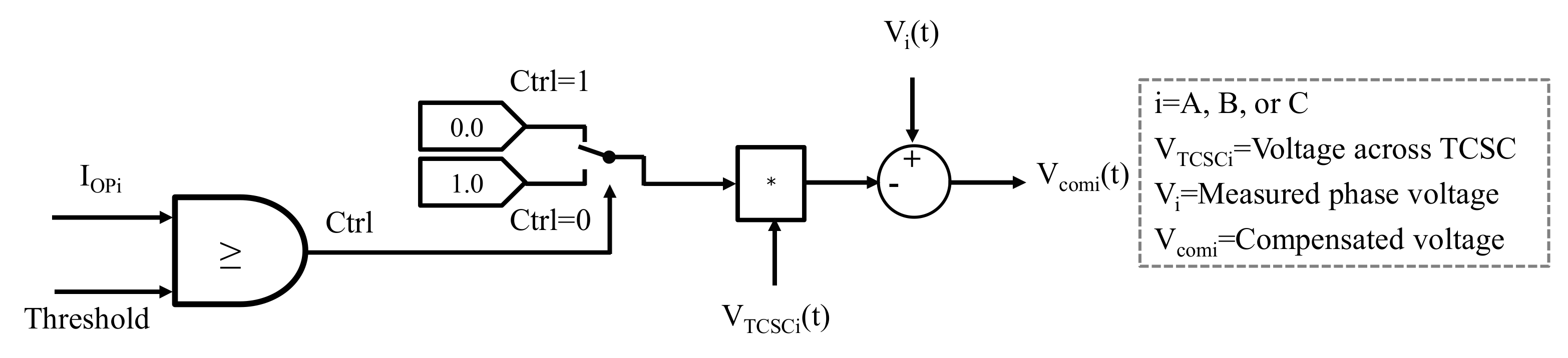
3.2.1. Voltage Compensator
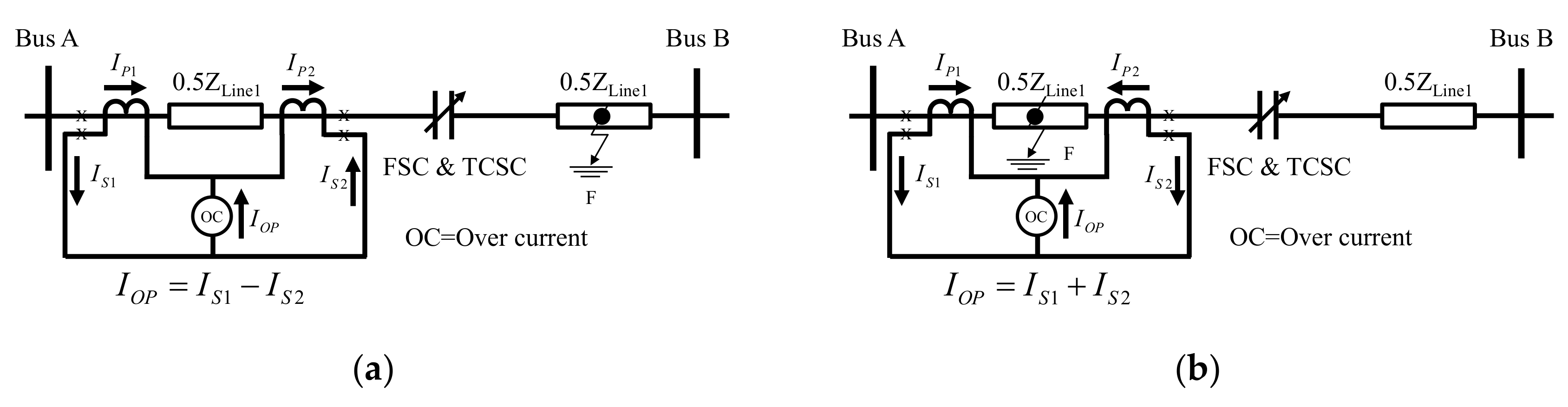
3.2.2. Detection of the TCSC in the Fault Loop
3.3. Distance Relay Setting
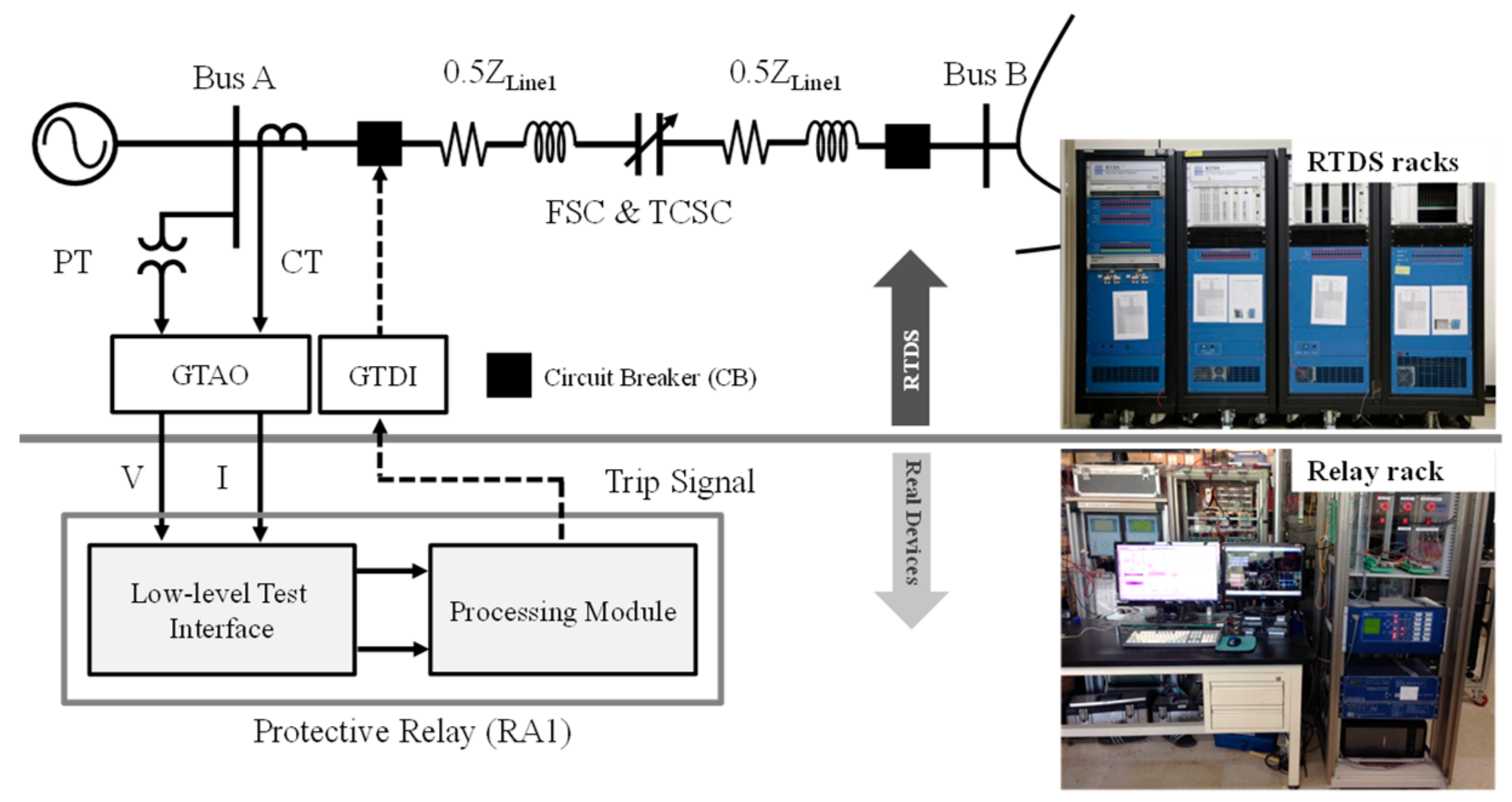
4. RTDS-Based Closed-Loop Test Bed of a Distance Relay
5. Results and Discussion
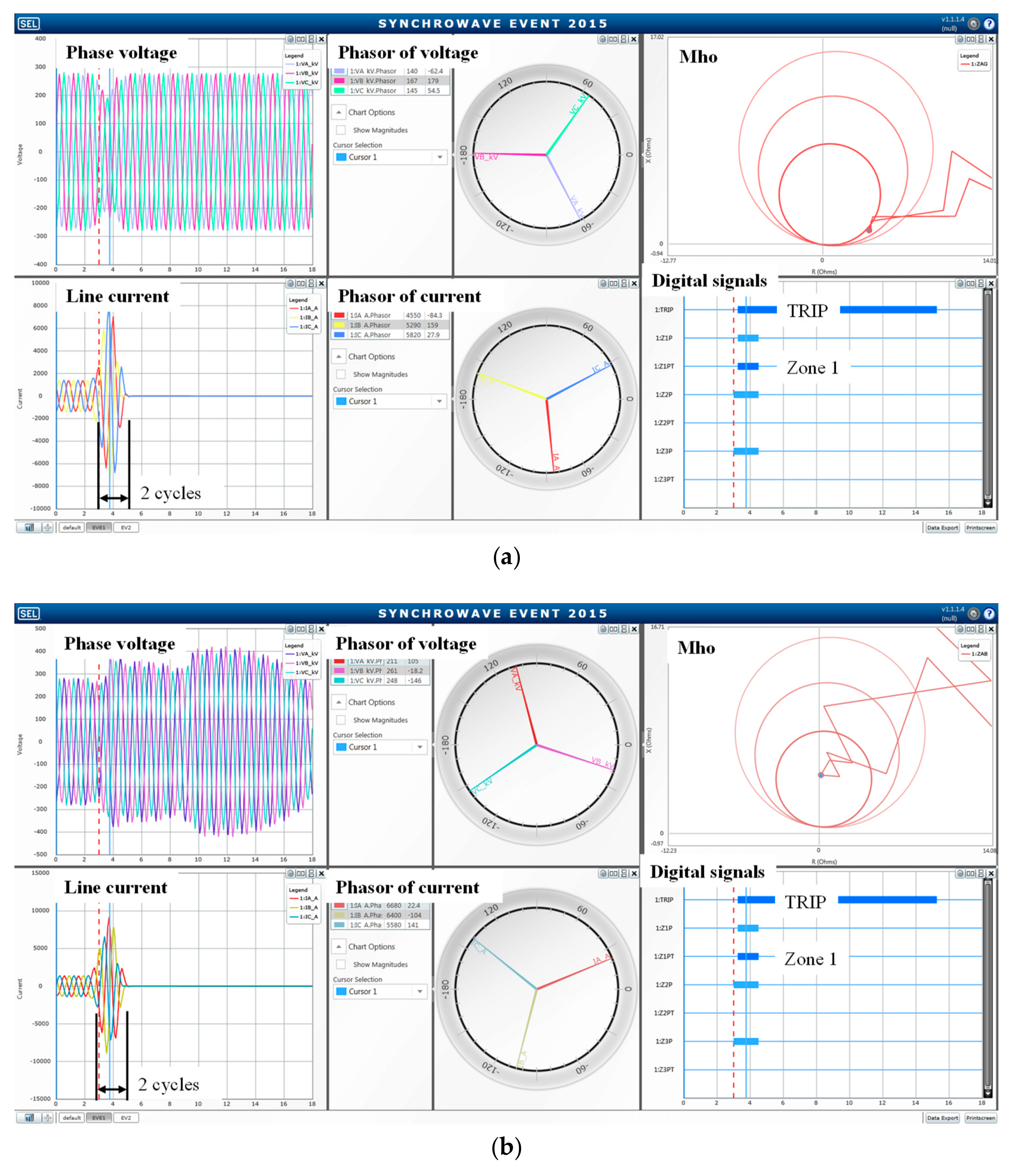
5.1. The Test Results
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| C | Capacitance of TCSC capacitor (μF) |
| L | Inductance of TCR inductor (mH) |
| XC | Minimum reactance of TCSC (Ω) |
| XL | Reactance of TCR inductor (Ω) |
| XTCSC | Controlled TCSC reactance (Ω) |
| VTCSC | TCSC injected voltage (kV) |
| EMOVmax | Maximum MOV energy (MJ) |
| EMOV | Measured MOV energy (MJ) |
| RMOV | MOV resistance (Ω) |
| iMOV | MOV current (kA) |
| vMOV | MOV voltage (kV) |
| iref | Current reference for MOV V-I characteristic curve (kA) |
| vref | Voltage reference for MOV V-I characteristic curve (kV) |
| Ld | Inductance of current limiting reactor in CB bypass branch (mH) |
| Irated | Rated line current (kA) |
| IL | Measured line current (kA) |
| Zm | Measured impedance by distance relay (Ω) |
| d | Fault location (p.u) |
| ZTCSC | Total TCSC impedance (Ω) |
| Z1L1, Z2L1, Z0L1 | Positive-, negative- and zero-sequence impedances of line 1 (Ω) |
| Z1L2 | Positive-sequence impedance of line 2 (Ω) |
| Z1TCSC,Z2TCSC,Z0TCSC | Positive-, negative- and zero-sequence impedances of TCSC (Ω) |
| k | Compensation degree (%) |
| IA, IB, IC | Three-phase currents of transmission line (kA) |
| Va, Vb, Vc | Three-phase voltages of transmission line (kV) |
| I1, I2, I0 | Symmetrical components of measured current by relay (kA) |
| V1, V2, V0 | Symmetrical components of measured voltage by relay (kV) |
| V1TCSC, V2TCSC, V0TCSC | Symmetrical components of TCSC voltage (kV) |
| V1comp, V2comp | Symmetrical components of compensated voltage (kV) |
| K0 | Zero-sequence compensation (ZSC) factor |
| K01 | Zone 1 ZSC factor |
| K0F | Forward ZSC factor |
| T1D, T2D, T3D | Time delay of protection zone 1, 2, and 3 (cycle) |
References
- Li, Y.; Li, Y.; Li, G.; Zhao, D.; Chen, C. Two-stage multi-objective OPF for AC/DC grids with VSC-HVDC: Incorporating decisions analysis into optimization process. Energy 2018, 147, 286–296. [Google Scholar] [CrossRef] [Green Version]
- Hingorani, N.G.; Gyugyi, L. Understanding FACTS: Concepts and Technology of Flexible AC Transmission Systems; IEEE Press: Piscataway, NJ, USA, 2019. [Google Scholar]
- Siemens. Discover the World of FACT Technology; Siemens AG: Munich, Germany, 2011. [Google Scholar]
- Zellagui, M.; Chaghi, A. Impact of TCSC on measured impedance by MHO distance relay on 400 kV Algerian transmission line in presence of phase to earth fault. J. Electr. Syst. (JES) 2012, 8, 273–291. [Google Scholar]
- Khederzadeh, M.; Sidhu, T.S. Impact of TCSC on protection of transmission lines. IEEE Trans. Power Deliv. 2006, 21, 80–87. [Google Scholar] [CrossRef]
- Jamali, S.; Kazemi, A.; Shateri, H. Distance relay over-reaching due to installation of TCSC on next line. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006. [Google Scholar]
- Liu, Q.; Wang, Z.; Xu, Y. Study on the influence of TCSC on fault component distance protection. In Proceedings of the IEEE/PES Transmission and Distribution Conference & Exhibition, Dalian, China, 18 August 2005. [Google Scholar]
- Kazemi, A.; Jamali, S.; Shateri, H. Distance relay over-reaching in presence of TCSC on next line considering MOV operation. In Proceedings of the 45th International Universities Power Engineering Conference (UPEC), Cardiff, UK, 31 August–3 September 2010. [Google Scholar]
- Zellagui, M.; Chaghi, A. Impact of TCSC on distance protection setting based modified particle swarm optimization techniques. Int. J. Intell. Syst. Appl. 2013, 6, 12–24. [Google Scholar] [CrossRef]
- Maori, A.; Tripathy, M.; Gupta, H.O. An advanced compensated Mho relay for protection of TCSC transmission line. In Proceedings of the 6th IEEE Power India International Conference (PIICON), Delhi, India, 5–7 December 2014. [Google Scholar]
- Sidhu, T.S.; Khederzadeh, M. TCSC impact on communication-aided distance-protection schemes and its mitigation. IEE Proc. Gener. Transm. Distrib. 2005, 21, 714–728. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Hagh, M.T.; Seyedi, H. High-speed relaying scheme for protection of transmission lines in presence of thyristor-controlled series capacitor. IET Gener. Transm. Distrib. 2014, 8, 2083–2091. [Google Scholar] [CrossRef]
- Novosel, D.; Phadke, A.; Saha, M.M.; Lindahl, S. Problems and Solutions for Microprocessor Protection of Series Compensated Lines. In Proceedings of the 6th International Conference on Developments in Power System, Nottingham, UK, 25–27 March 1997. [Google Scholar]
- Shadriari, S.A.A.; Abardeh, M.H.; Varjani, A.Y.; Mohamadian, M. Using Fault Current Limiter to Minimize Effect of Thyristor Controlled Series Capacitor on Over Reach Problem of Distance Protection. In Proceedings of the 2009 IEEE/PES Power System Conference and Exposition, Seattle, WA, USA, 15–18 March 2009. [Google Scholar]
- Dinh, M.; Park, S.; Kim, S.; Park, M.; Yu, I. Suggestion of a novel PHILS method for operation analysis of a thyristor controlled series capacitor. In Proceedings of the 2015 IEEE 11th International Conference on Power Electronics and Drive Systems, Sydney, NSW, Australia, 9–12 June 2015. [Google Scholar]
- RTDS Technologies Inc. RTDS Manual; RTDS Technologies Inc.: Winnipeg, MB, Canada, 2018. [Google Scholar]
- Pilotto, L.A.; Bianco, A.; Long, W.F.; Edris, A. Impact of TCSC control methodologies on sub-synchronous oscillations. IEEE Trans. Power Deliv. 2003, 18, 243–252. [Google Scholar] [CrossRef]
- Lee, S.R.; Yoon, J.; Kim, J.; Yang, B.; Lee, B. Protective relay tests of a hybrid SFCLs in a Korean distribution power system using RTDS. IEEE Trans. Appl. Supercond. 2011, 21, 2188–2192. [Google Scholar] [CrossRef]
- Jiang, J.A.; Lin, Y.H.; Yang, J.Z.; Too, T.M.; Lin, C.W. An adaptive PMU based fault detection/location technique for transmission lines—Part II: PMU implementation and performance evaluation. IEEE Trans. Power Deliv. 2000, 5, 486–493. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Mode | Impedance Characteristics |
|---|---|---|
| 1 | Blocked mode without TCSC | -jXc |
| 2 | Blocked mode with TCSC | -jXC in parallel with RMOV |
| 3 | Capacitive mode with TCSC | [1~3] × (-jXC) |
| 4 | Capacitive mode without TCSC | [1~3] × (-jXC) in parallel with RMOV |
| 5 | TCSC Bypass | -jXC in parallel with jXL |
| 6 | CB Bypass | ~0 |
| Component | Parameters | Value | Unit |
|---|---|---|---|
| Sending source | Voltage magnitude | 345 | kV |
| Phase angle | 30 | Degree | |
| Positive sequence impedance | 1.3945 + j15.9391 | Ω | |
| Zero sequence impedance | 7.454 + j27.8287 | Ω | |
| System frequency | 60 | Hz | |
| Receiving source | Voltage magnitude | 345 | kV |
| Phase angle | 0 | Degree | |
| Positive sequence impedance | 1.3945 + j15.9391 | Ω | |
| Zero sequence impedance | 7.454 + j27.8287 | Ω | |
| Lines | Positive sequence impedance | 0.037 + j0.367 | Ω/km |
| Zero sequence impedance | 0.296 + j1.102 | Ω/km | |
| Length of line 1 | 200 | km | |
| Length of line 2 | 100 | km |
| Parameters | Symbol | Value | Unit |
|---|---|---|---|
| Minimum reactance of TCSC | XC | 3.67 | Ω |
| The capacitance of the fixed capacitor | C | 722.77 | μF |
| The inductance of the TCR inductor | L | 1.56 | mH |
| Parameters | Min Value | Max Value | Unit |
|---|---|---|---|
| Percentage compensation | 5 | 15 | % |
| Firing angle | 180 | 148 | Degree |
| Reactance of TCSC (blocked-mode) | −j3.67 | - | Ω |
| Reactance of TCSC (capacitive mode) | −j3.67 | −j11.01 | Ω |
| Reactance of TCSC (bypass mode) | j0.7 | - | Ω |
| Component | Parameters | Value | Unit |
|---|---|---|---|
| CB Bypass | Current limiting reactor (Ld) | 0.1 | mH |
| FSC | MOV reference current | 6.5 | kA |
| MOV reference voltage | 156 | kV | |
| MOV exponent | 16 | ||
| Maximum MOV energy | 30 | MJ | |
| TCSC | MOV reference current | 2.5 | kA |
| MOV reference voltage | 60 | kV | |
| MOV exponent | 16 | ||
| Maximum MOV energy | 30 | MJ |
| No | Mode | Distance Relay Operation |
|---|---|---|
| 1 | Blocked mode without TCSC | Over-reach |
| 2 | Blocked mode with TCSC | Over-reach less than case 1 |
| 3 | Capacitive mode with TCSC | Over-reach |
| 4 | Capacitive mode without TCSC | Over-reach less than case 3 |
| 5 | TCSC Bypass | Under-reach slightly |
| 6 | CB Bypass | Normal |
| Setting Contents | Setting Design | Value | Unit |
|---|---|---|---|
| Zone 1 Impedance Reach | Z1 = 0.85Z1L1 | 62.7 | (Ω, Pri.) |
| Zone 2 Impedance Reach | Z2 = Z1L1+0.5Z1L2 | 92.2 | (Ω, Pri.) |
| Zone 3 Impedance Reach | Z3 = Z1L1+1.25Z1L2 | 119.85 | (Ω, Pri.) |
| Zone 1 ZSC Factor | K01 = (Z0L1 − Z1L1)/(3Z1L1) | 0.7 (Mag) −13.62° (Phase) | |
| Forward ZSC Factor | K0F = K01 | ||
| Zone 1 Time Delay | T1D | 0 | Cycles |
| Zone 2 Time Delay | T2D | 20 | Cycles |
| Zone 3 Time Delay | T3D | 100 | Cycles |
| Case | Fault Type | Fault Location | Design | Original Protection | Suggested Protection | ||||
|---|---|---|---|---|---|---|---|---|---|
| Line | Fault Point | Time | Zone | Time | Zone | Time | Zone | ||
| 1 | AB ABG ABC | 1 | 0–50 | Inst. | 1 | Inst. | 1 | Inst. | 1 |
| 2 | 1 | 50–85 | Inst. | 1 | Inst. | 1 | Inst. | 1 | |
| 3 | 1 | 85–100 | Time | 2 | Inst. | 1 | Time | 2 | |
| 4 | 2 | 0–50 | Time | 2 | Inst. | 1 | Time | 2 | |
| 5 | 2 | 50–90 | Time | 3 | Inst. | 1 | Time | 3 | |
| 6 | 2 | 90–100 | Time | 3 | Time | 2 | Time | 3 | |
| 7 | AG | 1 | 0–50 | Inst. | 1 | Inst. | 1 | Inst. | 1 |
| 8 | 1 | 50–85 | Inst. | 1 | Inst. | 1 | Inst. | 1 | |
| 9 | 1 | 85–100 | Time | 2 | Inst. | 1 | Time | 2 | |
| 10 | 2 | 0–50 | Time | 2 | Inst. | 1 | Time | 2 | |
| 11 | 2 | 50–90 | Time | 3 | Time | 2 | Time | 3 | |
| 12 | 2 | 90–100 | Time | 3 | Time | 2 | Time | 3 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dinh, M.-C.; Tran, M.-Q.; Lee, J.-I.; Lee, S.-J.; Lee, C.H.; Yoon, J.; Park, M. Suggestion of a New Protection Scheme for a Transmission System Equipped with a Thyristor-Controlled Series Capacitor. Energies 2019, 12, 2250. https://doi.org/10.3390/en12122250
Dinh M-C, Tran M-Q, Lee J-I, Lee S-J, Lee CH, Yoon J, Park M. Suggestion of a New Protection Scheme for a Transmission System Equipped with a Thyristor-Controlled Series Capacitor. Energies. 2019; 12(12):2250. https://doi.org/10.3390/en12122250
Chicago/Turabian StyleDinh, Minh-Chau, Minh-Quan Tran, Jae-In Lee, Seok-Ju Lee, Chur Hee Lee, Jongsu Yoon, and Minwon Park. 2019. "Suggestion of a New Protection Scheme for a Transmission System Equipped with a Thyristor-Controlled Series Capacitor" Energies 12, no. 12: 2250. https://doi.org/10.3390/en12122250