1. Introduction
With the fossil resource exhaustion, the world has turned to inverter-interfaced distributed generators (DGs) based on variable renewable energy sources (RESs) such as water energy, wind energy, solar energy and so on. The penetration of DG is rapidly increasing in power system, which brings new challenges such as stability and security issues to the traditional power system [
1]. Under this circumstance, the concept of the microgrid appears as a solution to integrating DGs in an efficient and environment-friendly way [
2]. A microgrid can operate in the grid-connected mode or islanded mode, where the difference lies in whether the microgrid feeds its own interior loads [
3,
4]. This paper mainly studies the islanded operation mode of a microgrid, where the main challenge is to achieve proper power sharing and to regulate voltage magnitude and frequency within limited error range.
Comparing with the grid-connected operation mode, the islanded microgrid must regulate voltage/frequency on its own. Traditionally, because of the unpredictable nature of RES, the duty of frequency/voltage regulation falls on the tradition generation units such as thermal generation and energy storage system. Meanwhile, the RESs are always operated based on the maximum power point tracking (MPPT) algorithms to be more efficient and economic. However, with the increasing usage of RES and decreasing usage of fossil energy sources in microgrid, it becomes harder and more expensive to install a massive energy storage system to provide enough energy reserve for voltage/frequency regulation. Under extreme conditions, the energy storage may not be able to ensure the power balance, such as the case where the battery system needs charging stage. So, it is essential for RES to participate in the voltage/frequency regulation as well as remain its efficiency.
As a decentralized control method, droop control is to imitate
P-f and
Q-v characteristics of synchronous machine [
5] based on local measurements, which is flexible considering the physical locations of DGs in microgrid. With droop control, all DGs are equal to participate in power sharing with no superiors or subordinates. However, the traditional droop control cannot perform properly in when taking RES into consideration for its frequent generation fluctuation that may cause power curtailment or power overloading, in turns may affect stability and efficiency.
So, there are different approaches to optimize the droop control for RES characteristics. In Reference [
6], a time-variable droop characteristic is proposed in order to provide frequency support for wind turbine generators, where a time-variable function is added to the fixed droop coefficient in order to stabilize power output. It is shown in Reference [
7] that the regulation of droop coefficient can maintain the system stability. Therefore, it is feasible to design droop coefficient to optimize power sharing while considering stability constrains. A fuzzy-based optimized droop control for DC microgrid is proposed in Reference [
8], where the real-time power output of RES is considered to regulate the droop coefficient. An adaptive droop coefficient appears in Reference [
9], where the coefficient is adjusted according to the characteristics of RES. But the literatures above have limited application scenarios and do not consider the efficiency and economic of RES. Traditionally, economic dispatch is added to droop control minimize the operation cost based on the cost function. Reference [
10] proposes a hierarchical distributed economic control algorithm by adjusting the droop coefficient based on cost function and [
11] proposes a cost-based droop scheme to reduce generation cost considering various DG operating characteristics. However, as for different kinds of RES, there is no unified cost function, the parameters are uncertain which should be designed according to RES characteristics. So, the application of RES with droop control needs more study.
Moreover, the droop control has its own stability drawbacks such as a dilemma between accurate power sharing and voltage/frequency deviation, a high dependency on the inverter output impedance, and a slow transient response and so on [
12]. To overcome these issues, [
13] considers different line impedance, [
14,
15,
16] proposes an adjustable virtual output impedance, [
17] adds a frequency restoration loop to the conventional droop control, [
18] applies fuzzy logic controller to improve transient response and [
19] proposes a transient droop gains in order to increase robust stability. Besides the direct improvement to the traditional droop control, the secondary control is also considered to regulate frequency/voltage deviation. The multi-agent system is applied in Reference [
20] to getting back to the synchronization of voltage and frequency and being robust to noise. And [
21] provides a developed expert system to solve severe voltage problems in selecting a best software to start restoring the voltage. So, auxiliary stability control methods should be considered for droop control strategy.
Despite the studies above, the issues of droop control RES considering both generation fluctuation and energy utilization have not been widely discussed in current literatures. In an islanded microgrid with multiple generation units such as RES and other traditional energy units, the more power RES provides, the more economical the system is. However, the high proportion of RES will affect the stability of the system for it has a frequent power fluctuation. Considering these issues, this paper proposes an adaptive fuzzy droop control (AFDC) with a droop coefficient adjustment for optimized power sharing. The major contributions of this paper are: (1) the designing of fuzzy controller considers both generation fluctuation and power utilization of RES. The inputs of fuzzy controller are the power deviation and the relationship of rated generation and demand, representing the power fluctuation of RES and the energy utilization, respectively. The droop coefficient is adjusted by the above factors preventing power overloading/curtailment, as well as realizing maximum utilization of RES units; (2) there is a secondary control to restore the frequency/voltage drop resulting from the primary droop control and a static virtual impedance to eliminate the influence of line impedance. When comes to economic power sharing, the positive power plays a more important role than that of the reactive power, so this paper only discusses the positive power sharing among each RES. The stability analysis is used to analyze the dynamic characteristics of the proposed control strategy and the effectiveness of the proposed method is analyzed by MATLAB/Simulink simulations.
The rest of this paper is organized as follows.
Section 2 presents the modeling and control of microgrids with a high proportion of RES.
Section 3 presents the adaptive droop control based on fuzzy logic.
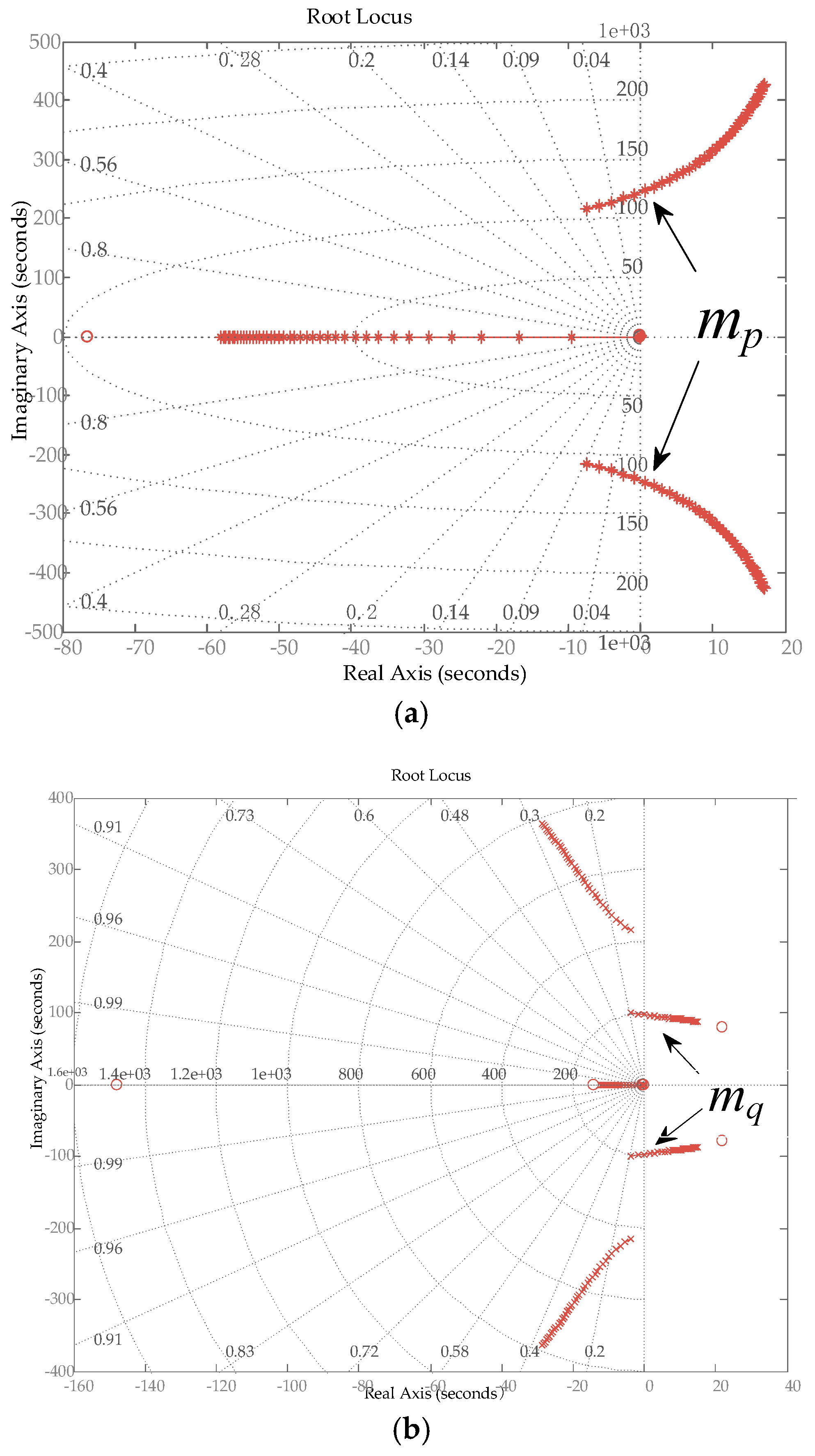
Section 4 shows the stability analysis with eigenvalues analysis for adaptive droop coefficient and Lyapunov stability for the secondary control.
Section 6 shows the simulation results of the proposed droop control under different operation modes. Finally, in
Section 6, the conclusions and perspectives for future works are presented.
2. Microgrid Operation and Control
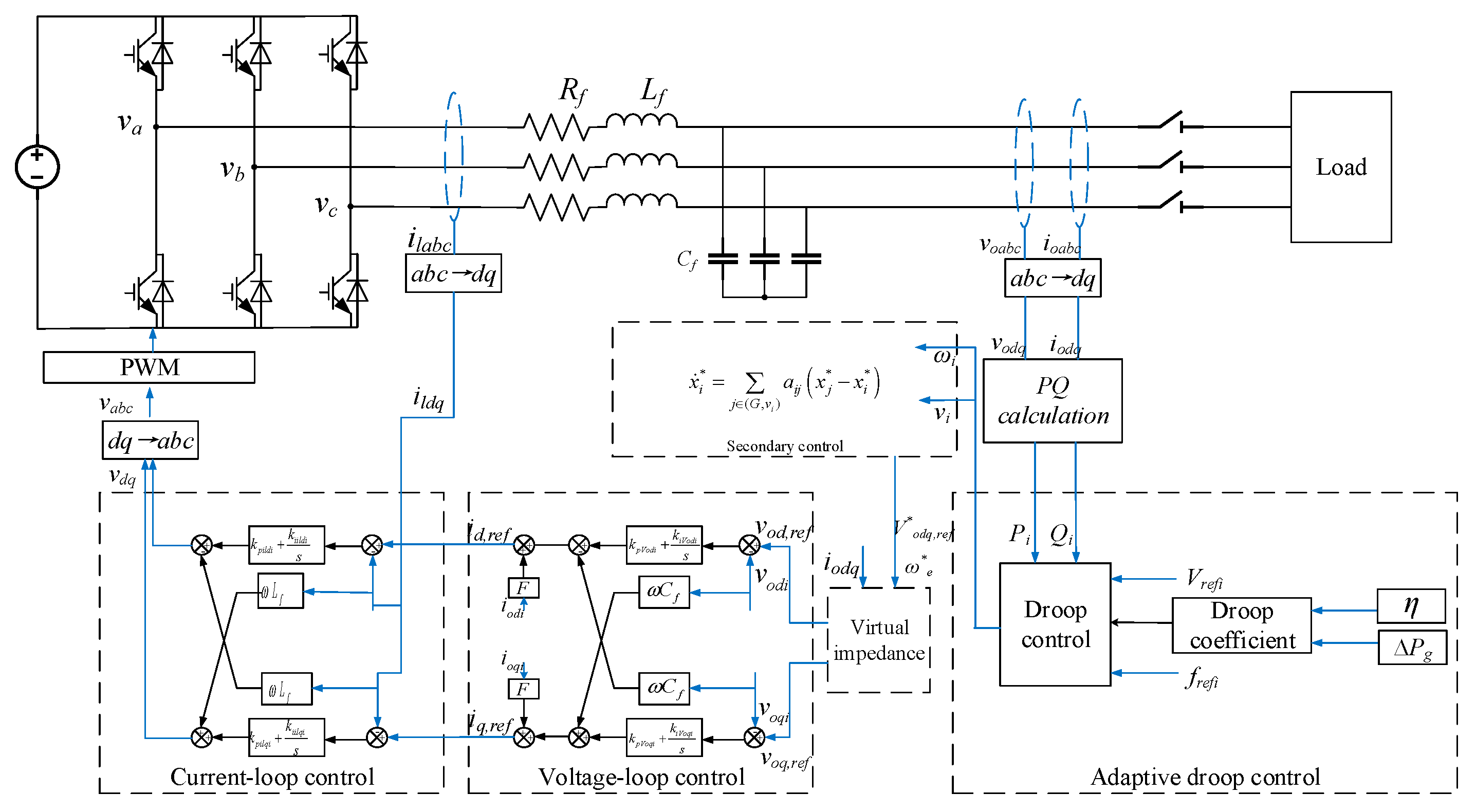
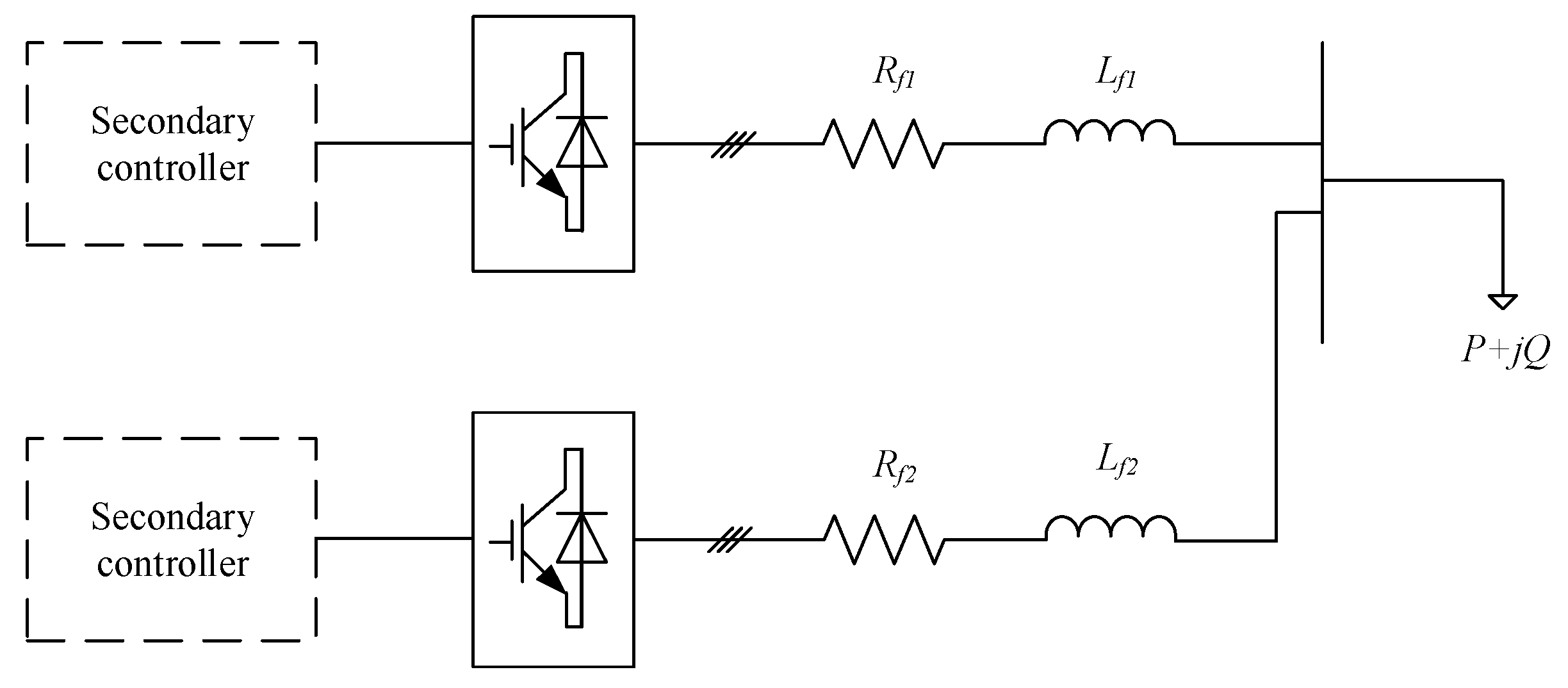
When microgrid system operates in islanded mode, the DG units are generally operated under droop control. With the disadvantages of inevitable frequency and voltage deviation caused by traditional droop control, there is always a secondary control to restore frequency and voltage in order to stabilize the system. The overall structure of control strategy for multi-DG microgrid is shown in
Figure 1, including primary droop control for power sharing, inner voltage and current loops for generating PWM modulation signal and secondary control for the restoration of frequency and voltage amplitude. The control procedure is as follows: first, the adaptive fuzzy droop control is used as the primary control to manage the power sharing of each RES, which will cause a deviation in voltage magnitude and frequency. At the same time, the secondary control to restore voltage magnitude and frequency is completed by MAS controllers. The regulated voltage and frequency are sent to static virtual impedance loop, which is to eliminate the influence of line impedance. Then, the voltage will be transmitted to the double closed loops. The output (
Id,ref,
Iq,ref) of the voltage loop is the input of the current loop. Finally, the output (
Vd,
Vq) of the current loop is used to make the PWM signal to control the operation of the DG.
2.1. Droop Control and Static Virtual Impedance
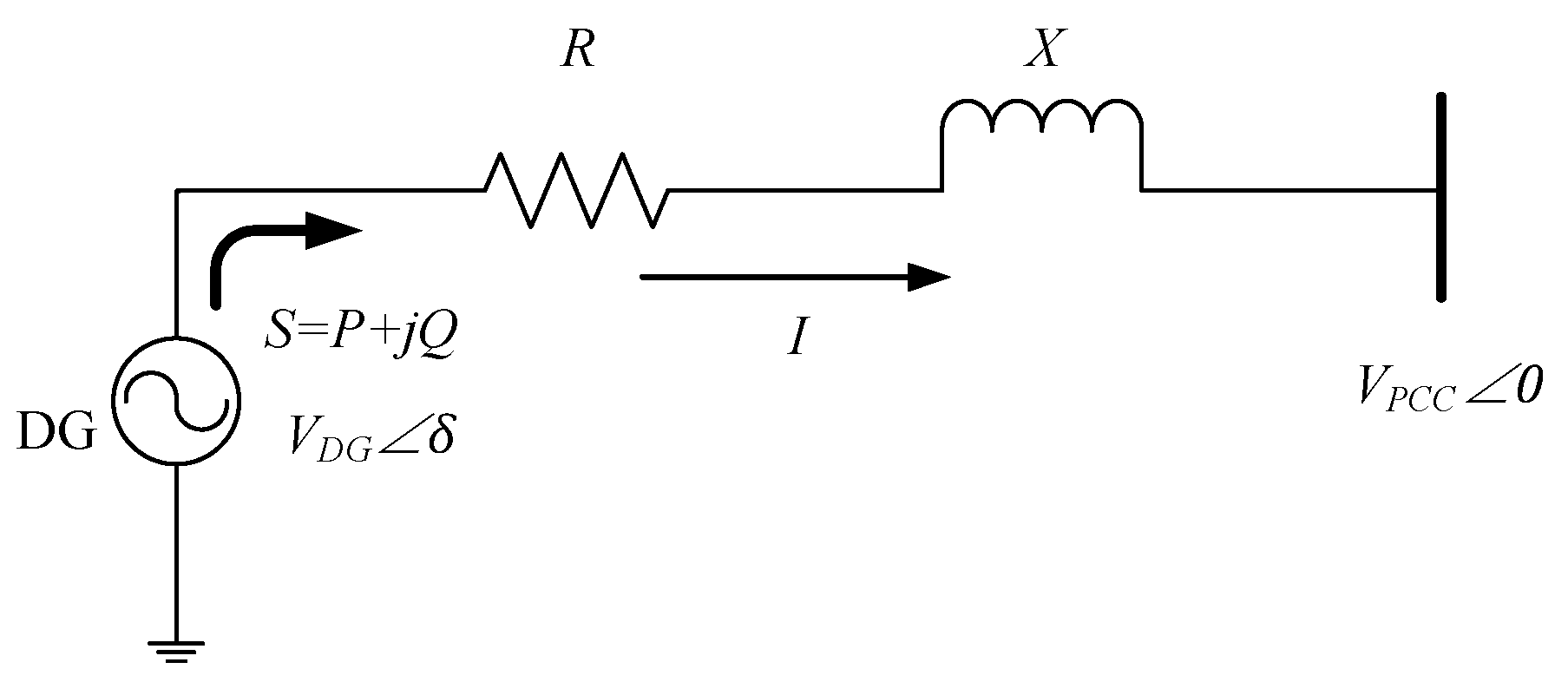
In order to balance the power sharing and increase system inertia, the conventional droop control method is widely used in microgrid. The basic droop control strategy can be illustrated in
Figure 2, which is a simple diagram with a distributed generation (DG) connecting to the point of common coupling (PCC). In
Figure 2,
Z = R + jX is the line impedance,
VDG∠ δ is the output voltage of DG inverter,
S = P + jQ is the power injection from DG to the main grid and
VPCC∠ 0 is the voltage of PCC.
Based on the current analysis theory, the power injection from DG to the main grid can be expressed as:
And then, the positive power and reactive power from DG can be expressed as:
For those high-voltage and medium-voltage grids, the inductive characteristics are far stronger than the resistive characteristics, which is
X>>R, so the positive power and reactive power can be rewritten as:
Then, considering the phase angle difference between the output voltage of the DG unit and that of PCC is usually quite small, where
sin δ ≈ δ, cos
δ ≈ 1. So, the decoupling of positive power control and reactive power control can be realized, where positive power is proportional to the voltage phase angle difference (
δ), which can be substituted by frequency and reactive power is proportional to the voltage amplitude difference (
VDC-VPCC). And the active power-frequency (
P-f) droop and reactive power-voltage (
Q-v) droop can be expressed as follows:
where
i is the DG index,
mpi and
mqi are the droop coefficients represented active and reactive power, respectively, which are usually chosen based on the capacity of DG unit.
VDGi and
fi are voltage magnitude and frequency reference sent to the secondary control loop (where
fi is transformed in terms of
ωi).
Pi and
Qi are the local output active and reactive power and the subscript “
o” represents the rated operation points.
Despite the good performance in the inductive microgrid, when comes to the low-voltage microgrid where the line resistance cannot be ignored, the conventional droop control cannot decouple the positive power and reactive power, which will in turns cause an inaccurate power sharing and unstable operation. In order to eliminate the influence of line impedance, the virtual impedance is always needed. The advantages of virtual impedance are that it causes no power loss and increases the system performance by decoupling active power and reactive power if the parameters are designed properly.
With the static virtual output impedance loop, the voltage reference sent to PI voltage loop can be expressed as follows:
where
v*odi,ref and
v*oqi,ref are voltage references derived from
Ui* and
fi*, which come from droop equations after an
abc/dq transition,
RVi and
XVi represent the static virtual resistance and inductive impedance, respectively,
iodi and
ioqi are the output currents and the
vodi,ref and
voqi,ref are voltage references sent to voltage loop controller.
2.2. Inner Control Strategy
The inner control loops mainly include voltage and current control loops. Typically, voltage and current control loops include feedback and feed-forward terms [
22]. For the DG unit shown in
Figure 1. The differential equation can be acquired based on the Kirchhoff’s current and voltage laws, after an
abc/dq transition, the LCL filter can be expressed as:
where
ωi is the rotation speed of
dq frame,
Lf and
Rf are respectively the inductance and resistance of the L filter and
Cf is the capacitance of the C filter.
Based on the LCL filter, the voltage control methods can be expressed as follows:
After the voltage control, there is:
where
F is the voltage control coefficient to improve stability.
The reference currents are sent to current control loop, which is:
Then, the output of current control can be acquired, which are:
Then after a dq/abc transition, the PWM modulation signal can be obtained. These controllers can effectively reduce the resonance effects caused by droop control and in turns to improve the system stability.
2.3. Secondary Control Strategy
When the power generation and power demand have a mismatch, the output voltage reference of DG unit with conventional droop control will have a deviation from the rated value, both in frequency and amplitude. The secondary control is designed to guarantee the restoration of frequency and voltage after droop control, in turns keep the system stable under uncertain circumstances such as load change.
First some notations and preliminaries that are used in this paper are defined for the following analysis.
A directed graph G = (V, E, A) is defined to explain the system topology, where donates the node set which contains load and DG units, donates the edge set. The fact that node i can communicate with node j means that , which also means that node i is a neighbor of node j. For a directed graph G, its adjacency is defined by aii = 0, aij = 1 when and aij = 0 otherwise.
The impedance matrix is defined as and the voltage magnitude of node i: , based on the circuit theory, the line weighted matrix is , where . And matrix B is defined to represent the relationship of node and edge, represents when .
Based on the distributed multi-agent system, the secondary control is designed to restore the deviation of voltage magnitude and frequency. The basic idea is to realize the synchronization of voltage and frequency, which can be divided into two parts: first the initial value of all DGs should be consistent and then during the system operation the reference value can be sent to every DG.
As the microgrid is operated in islanded mode, there is no leader information from the main grid, so the reference value
xi* is the average value of all DG, which is
, where
xi* means frequency or voltage. The basic idea of multi-agent system is:
Take frequency control as an example, considering communication delay, the consistency controller is:
where
τ1 represents calculation delay,
τ2 represents the sum of communication delay and calculation delay and
d represents the weighted degree as
.
The control variable
ui(t) can be obtained when the error
is regulated by a PI controller. Then system with secondary control can be expressed as:
where
.
Similarly, the consistency of voltage magnitude can be obtained.
Remark: After the above control strategy, the microgrid can realize a stable operation with a balanced power sharing and frequency/voltage synchronized with the rated value regardless of line impedance and load variation. However, the characteristics of RES, such as power fluctuation of generation units, will cause an impact on system stability, which will be discussed in the following section.
3. Adaptive Fuzzy Droop Control
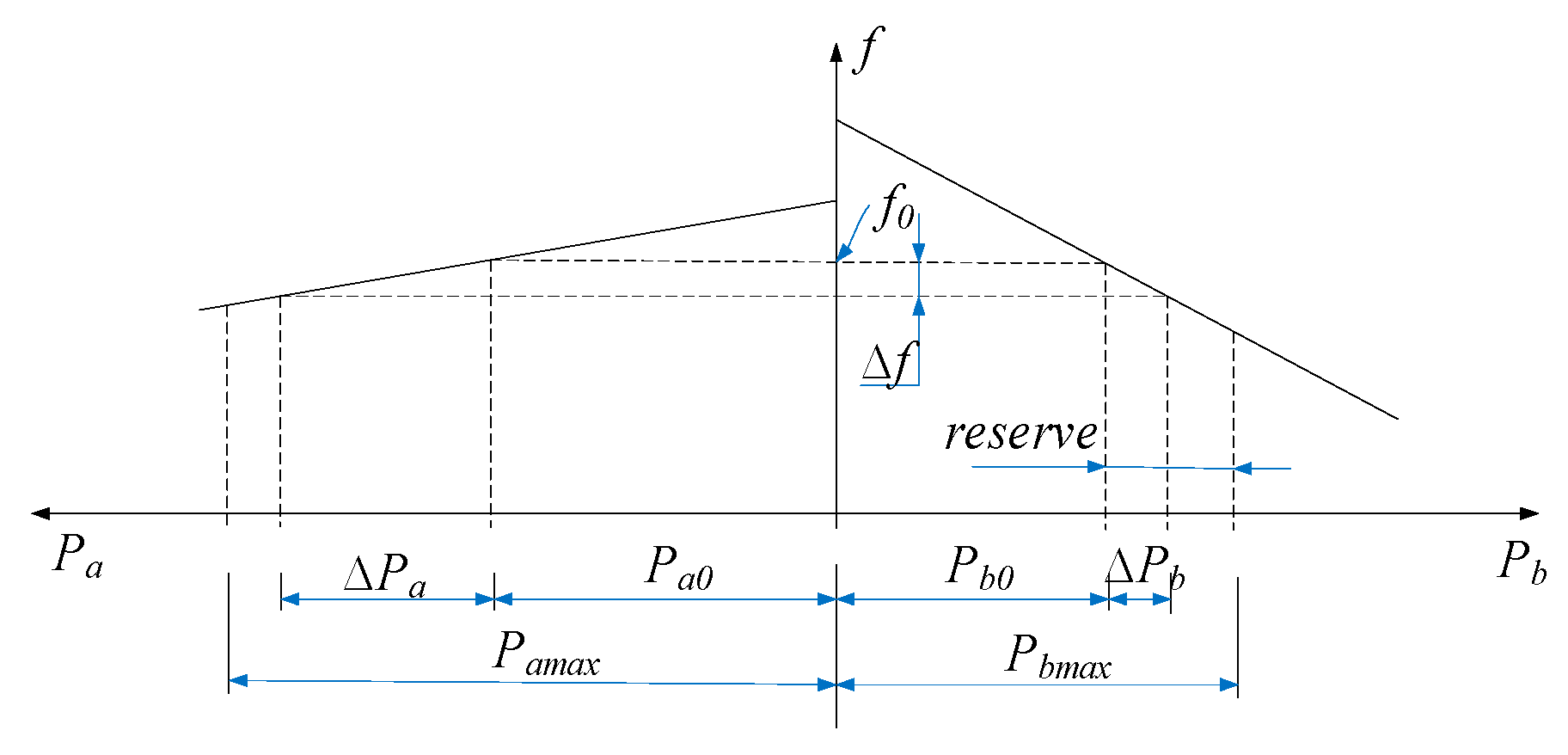
The conventional droop can provide primary frequency regulation, which imitates the operation of a synchronous machine. Take
P-f droop control for example, the relationship between frequency and positive power sharing is:
where
mP is the droop coefficient,
∆ω = ω − ωref represents the change of frequency and
∆Pm represents the change of power output according to the frequency change. This relationship is illustrated in
Figure 3 with two RESs. When the load increases, the system can rebuild the generation/demand balance with droop characteristics, where frequency drops and output power increases. The power sharing between RESs applies the following rules: one that with smaller
mP is responsible for a larger power share (i.e., ∆
Pb < ∆
Pa in
Figure 3).
The droop control is widely used in microgrids for its reliability. However, with the power fluctuation of RES, the reserve energy is always uncertain, which makes droop control hard to stabilize the system. So, the PQ operation mode, where the output power can be acquired from a maximum power point tracking algorithm, is a popular option for RES for (1) the maximum power output can be realized and (2) energy reserves for frequency regulation are not necessary. But with the islanded operation mode, there will be no frequency support from the main grid, so there must be some equipment to offer frequency regulation, commonly the energy storage systems (ESS). However, with the increasing of RES in the microgrid, the responsibility of frequency regulation may go beyond the ability of ESS and it may not be able to guarantee the power balance under extreme circumstances such as enormous generation fluctuation. What is more, the usage of ESS will increase the operation cost of the microgrid. So, an adaptive droop coefficient for RES units to participate in frequency regulation and optimized power sharing is needed.
For a microgrid, the design of droop coefficient,
mP, is usually based on the equitable power sharing, which is:
where
Pi is the output power of the
ith RES.
In traditional droop control, the droop coefficient is designed only based on the inverter capacity, which is not accurate when generation units have a power fluctuation. So, it should be adjusted based on the real-time power capacity of RES itself, in case of power overloading/curtailment.
If the RES has a sudden power reduction, the droop coefficient should be adjusted to decrease its output power, which means other RESs which have a larger power reserve will increase output power to rebuild the generation/demand balance. In this situation, the priority of designing droop coefficient is to ensure the system stability, where the RES should operate within its maximum power capacity.
What is more, the generation/demand relationship should be considered when designing the droop coefficient. When the power demand is quite low compared with the rated power generation (particularly referring to RES capacity) in real-time, the RES should be assigned a smaller droop coefficient to realize a larger power output with less energy waste, where the other equipment as ESS or fossil-fuel power generation units should decrease their output to reduce operation cost. This is the time when economic power sharing should be considered.
On the other hand, when the demand increases, the energy reserve will decrease and the necessity of frequency regulation calls for a larger droop coefficient, where the system stability is the prior objective. Therefore, the main consideration for coefficient selection is the power deviation, which represents the power fluctuation and the power balance, which represents the relationship between real-time power demand and rated power generation.
Fuzzy logic controller is suitable for the system with uncertainties, for it does not need a mathematical model and can realize a multi-objective optimization [
23,
24]. The fuzzy logic method can get the experience and knowledge of an expert to predict the system behavior, which is helpful in selecting the adaptive droop coefficient. It can be designed by requiring the power deviation and power balance, updating the droop coefficient and then realizing the optimized power sharing among RES considering stability and economics.
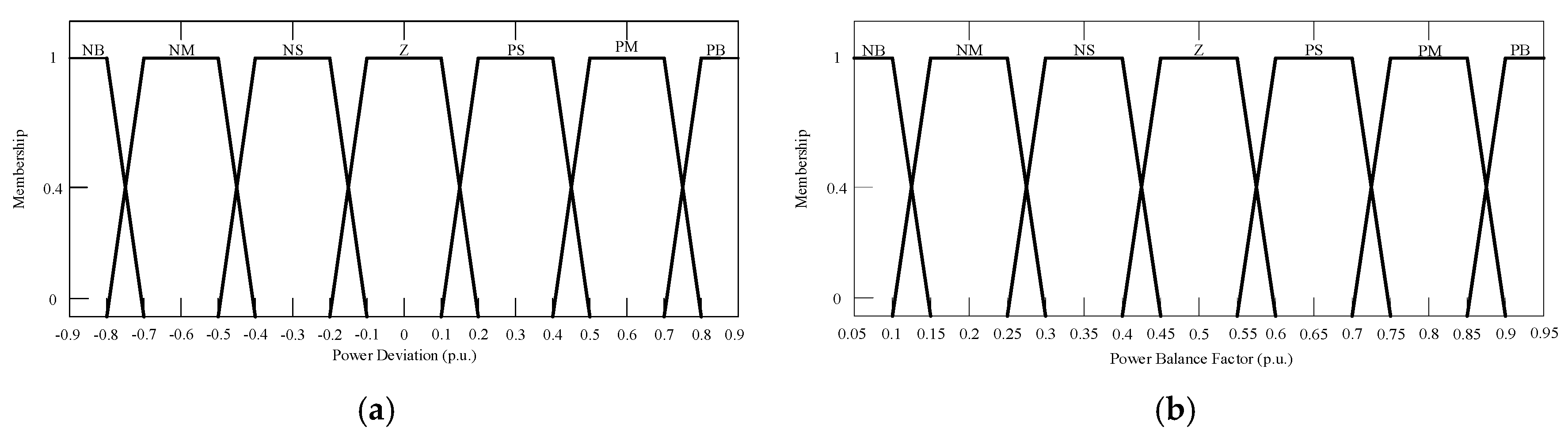
The triangle membership function is widely used in fuzzy logic system for its simplicity. However, the result of triangle membership is most likely a point value, where a different input value corresponds to a different output value, which is not accurate for the situation where the parameters are flat distributed. Compared with the triangle membership function, the trapezoidal-shaped membership function provides that the different input interval corresponds to a different result value, which is more suitable for droop coefficient regulation because the droop coefficient cannot be changed too frequently for the fear that the system stability is affected.
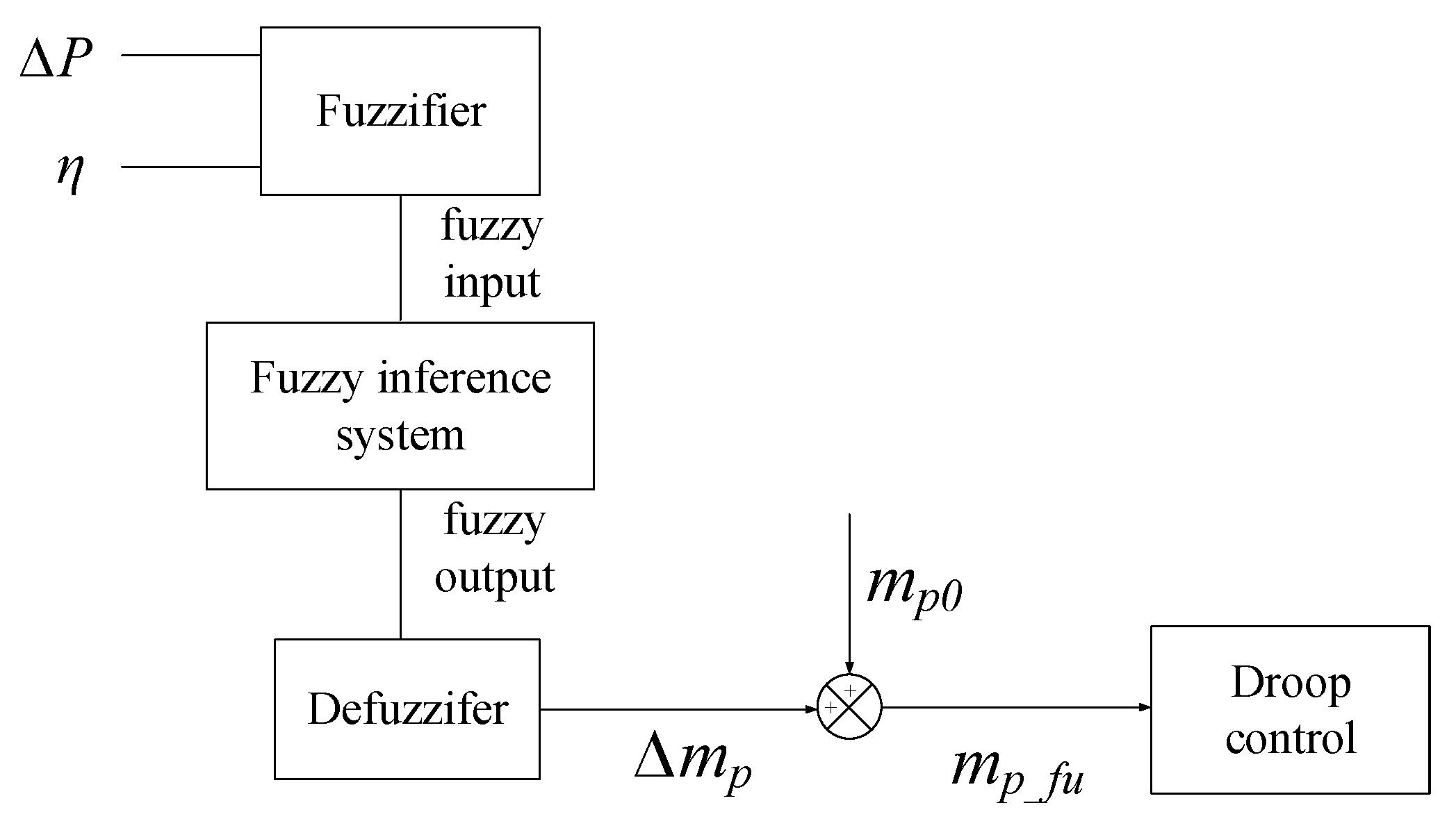
There are three different parameters in triangle membership function considering a single membership value, which are the minimum input value, the peak input value and the maximum input value. As for trapezoidal-shaped membership function, there are four different parameters because the peak input interval needs two input points. So, the trapezoidal-shaped membership is more flexible and more accurate. The design of input parameters is first obtained on the basis of expert experience then adjusted according to numeral simulations. As shown in
Figure 4, the input variables of fuzzy logic control are the power deviation Δ
P , where
t represents the sampling time and the power balance factor
η = . The range of
η is limited from 5% to 95%.
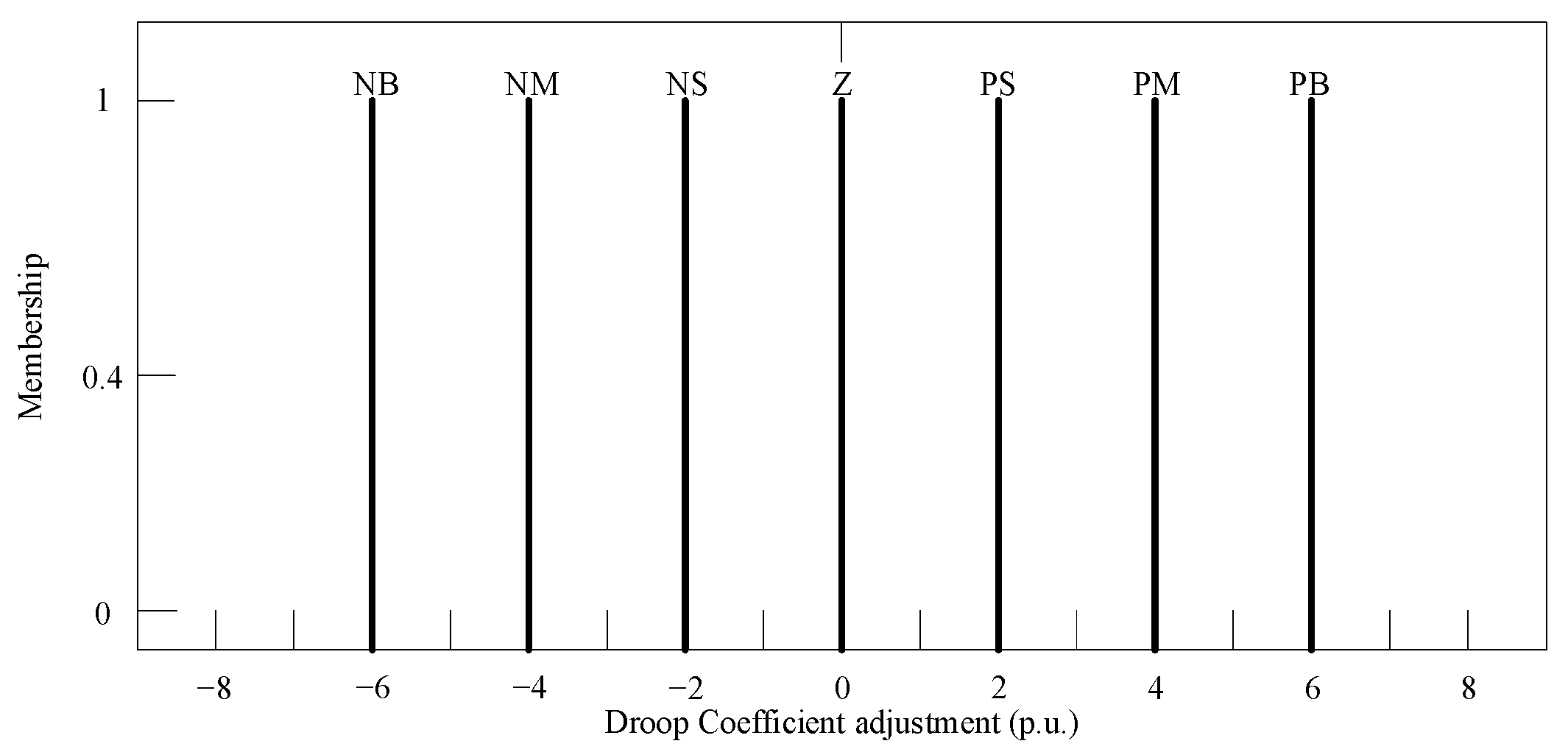
The influence of power deviation and power balance factor on droop coefficient is determined by the membership grade, which is expressed by linguistic variables: negative big (NB), negative medium (NM), negative small (NS), zero (Z), positive medium (PM), positive small (PS) and positive big (PB). The fuzzy membership functions for power deviation Δ
P and power balance factor
η, as well as the droop coefficient
mP are respectively shown in
Figure 5 and
Figure 6.
Take input power deviation ∆
P for example, the trapezoidal-shaped membership function for ∆
P corresponding to NM is defined as:
where the parameters Δ
Pmin, Δ
PNMmin, Δ
PNMmax and Δ
Pmax are chosen based on the influence of power deviation to the system operation. According to
Figure 5, Δ
Pmin = −0.8, Δ
PNMmin = −0.7, Δ
PNMmax = −0.5 and Δ
Pmax = −0.4. The membership function of power balance factor
η can also be seen in
Figure 5. And the single-value function can be understood clearly in
Figure 6.
After the fuzzifier which turns the input parameters into membership grades, there should be detailed fuzzy rules to determine the influence of input variables on output variable. The adjustment of droop coefficient
mp is based on the fuzzy logic controller. Depending on the power balance factor
η and the power deviation ∆
P, the
mp can be increased and decreased. The basic fuzzy inference rule is: when the power balance factor is relatively low, the droop coefficient should be decreased so that the RES can provide more power output because there can be less power reserve and the output power can be as much as the maximum value. Otherwise, when the power balance factor becomes high, the system stability will be the prior objective where the droop coefficient should be adjusted mainly according to the power deviation. The negative power deviation will cause an increase in droop coefficient because of the decrease in power reserve. When the power balance factor is in the medium value (i.e., 0.4 <
η < 0.6), the adjustment of
mp will be determined by both two factors. The fuzzy logic rules are listed in
Table 1. Based on the fuzzy rule, by using the mamdani fuzzy model with minimum and maximum relations, the output variable can be calculated.
By using the fuzzy inference and defuzzification, a nonfuzzy output, ∆
mp, is acquired, which can be added to the initial droop coefficient,
mp0, which is:
Applying (22) to (6), which is:
And the output positive power of RES can be regulated based on (23).
There are other adaptive control methods such as PID controllers, however, it is hard for PID controller to realize a multi-objective control with little calculation for the coupling of multiple input variables is hard to evaluate. The proposed AFDC is based on the expert experience and numeral simulations, which means it is easy to evaluate the relationship of each input variables. And the fuzzy rules are designed to illustrate the relationship of the input and output, which is quicker than PID controller and more accurate.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}