Leveraging Hybrid Filter for Improving Quasi-Type-1 Phase Locked Loop Targeting Fast Transient Response



Abstract
:1. Introduction
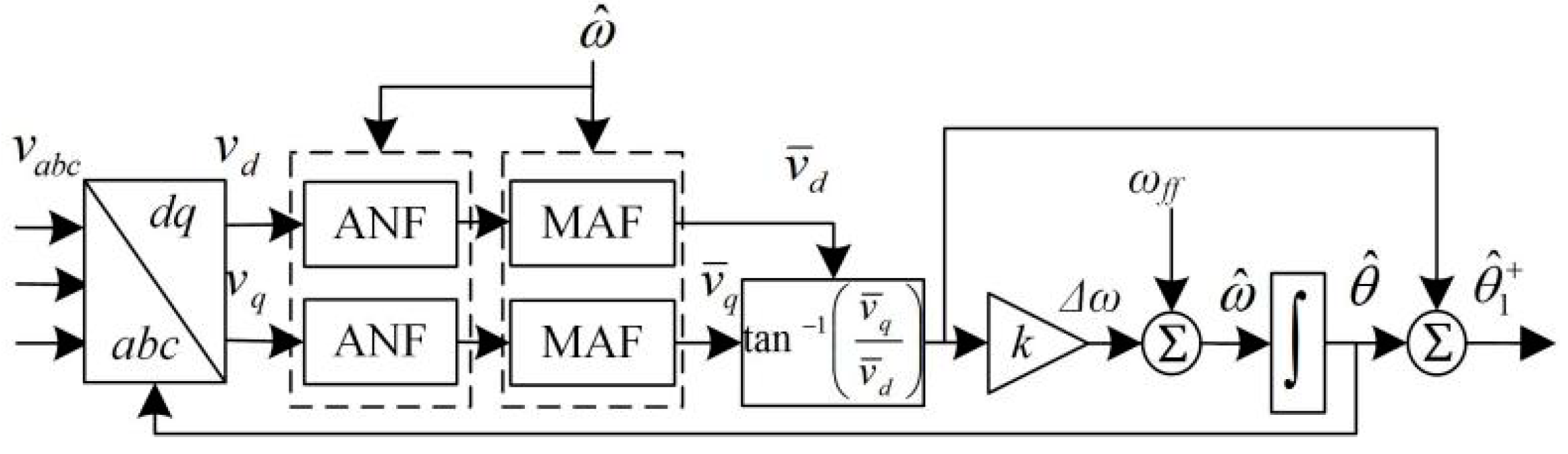
- A novel hybrid filtering stage with narrowed Tω of MAFs is proposed, which can remove dominant disturbances completely without degrading the dynamic performance.
- In conventional QT1-PLL, only phase margin (PM) is considered in design procedure [14]. In this paper, the settling times under two adverse grid conditions are directly taken into account in design guidelines. In addition, PM does not decrease yet.
- To validate the effectiveness of the proposed method, a comprehensive experimental study is performed which considers many cases such as phase and frequency change, voltage sag and harmonic polluted grid voltages. The results show that the transient behavior lasts for nearly one grid period. Compared with QT1-PLL, the settling time is reduced by nearly 40%, which makes it fulfill the stringent transient response requirement in most grid standard [6,7].
- As a byproduct, the proposed PLL can also handle dc offset by using two more ANFs. It is examined under dc offset injection condition. This advantage is confirmed by comparative experiments.
2. Literature Review
3. The Hybrid Filtering Stage and Proposed PLL
3.1. The Proposed PLL
3.2. Hybrid Cascaded Filtering Stage
3.3. Proposed Hybrid Filter with DC Offset Rejection Capability
4. Small-Signal Modeling and Design Procedure
4.1. Small-Signal Model
4.2. Parameter Design Guidelines
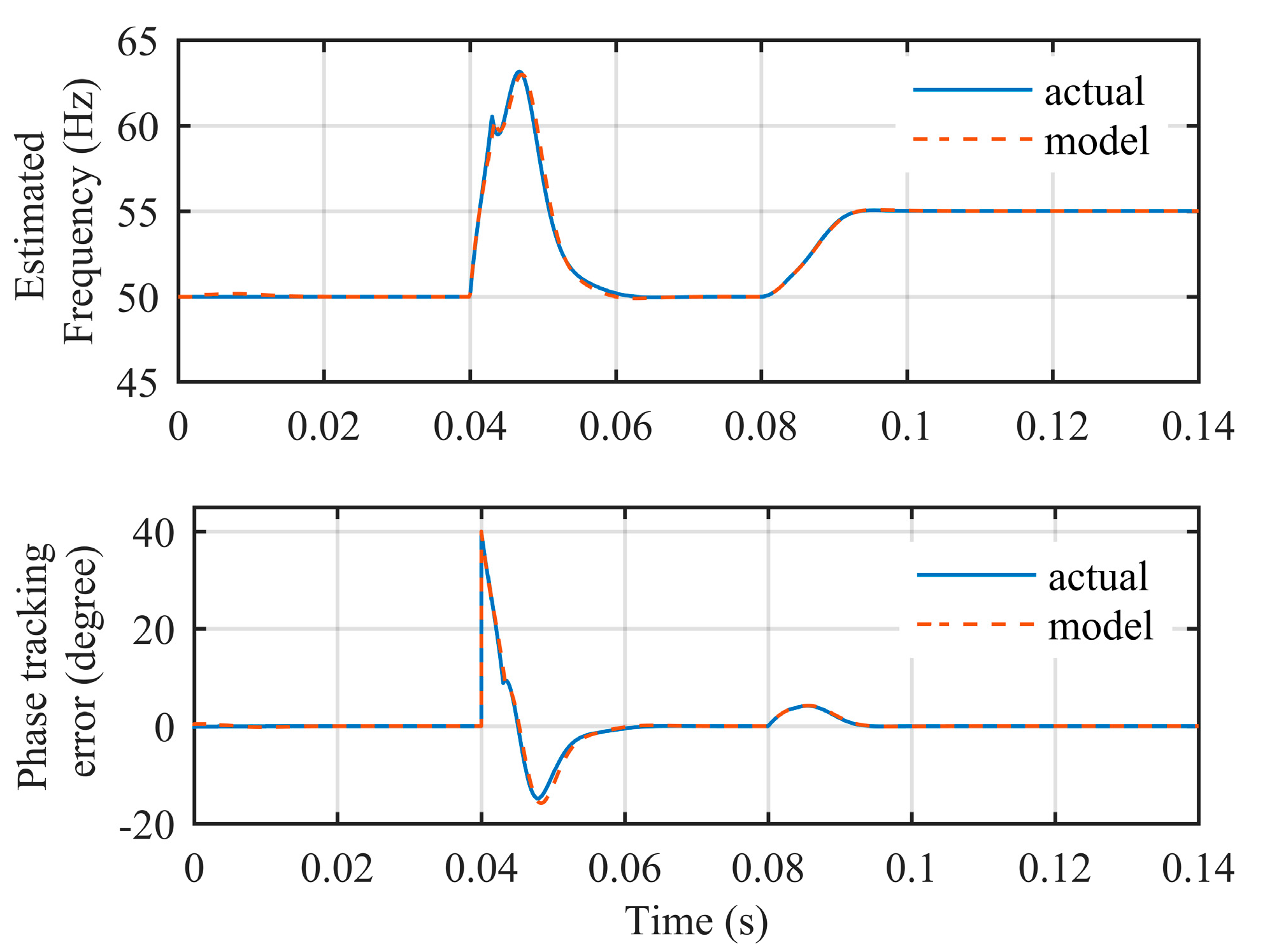
4.3. Assessment of Small-Signal Model
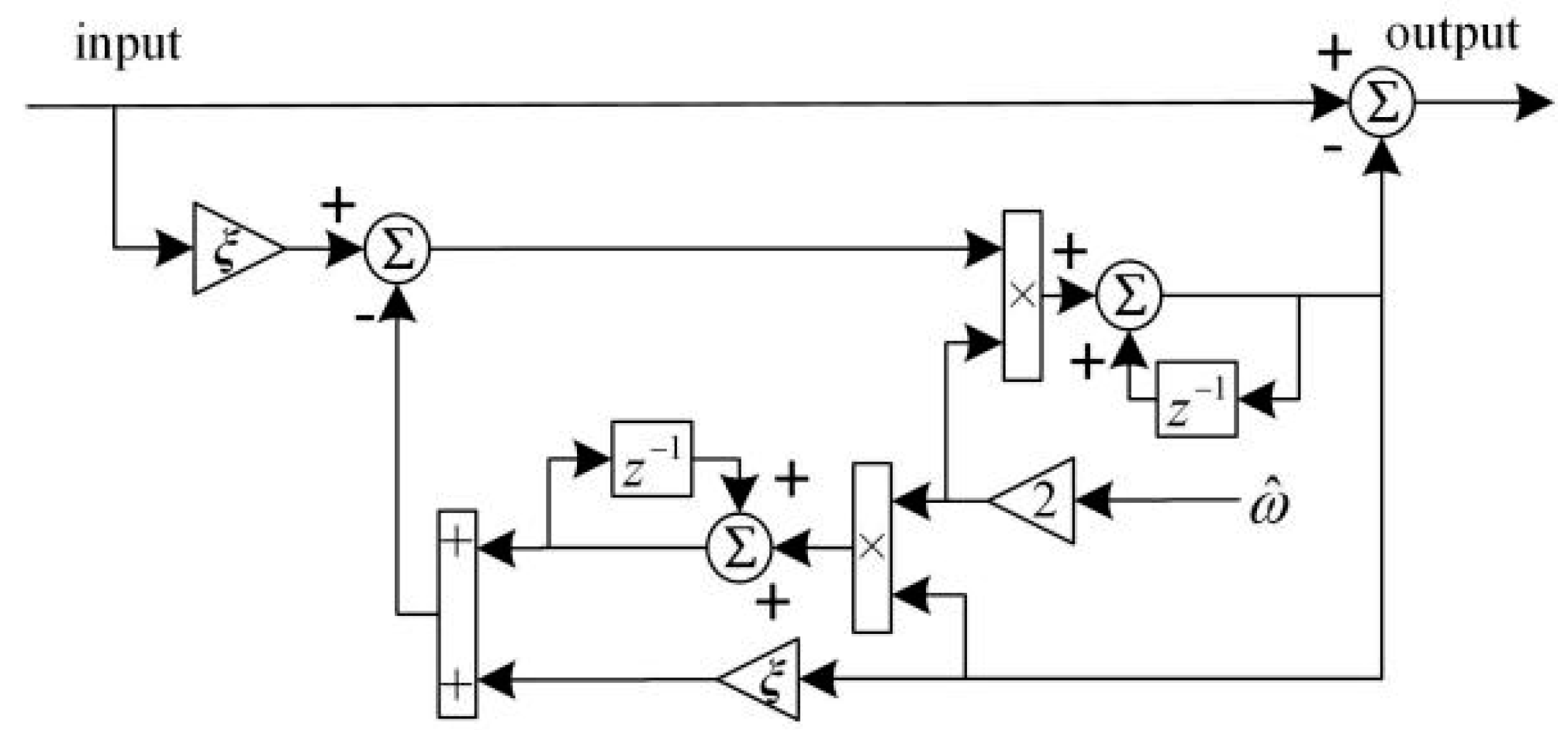
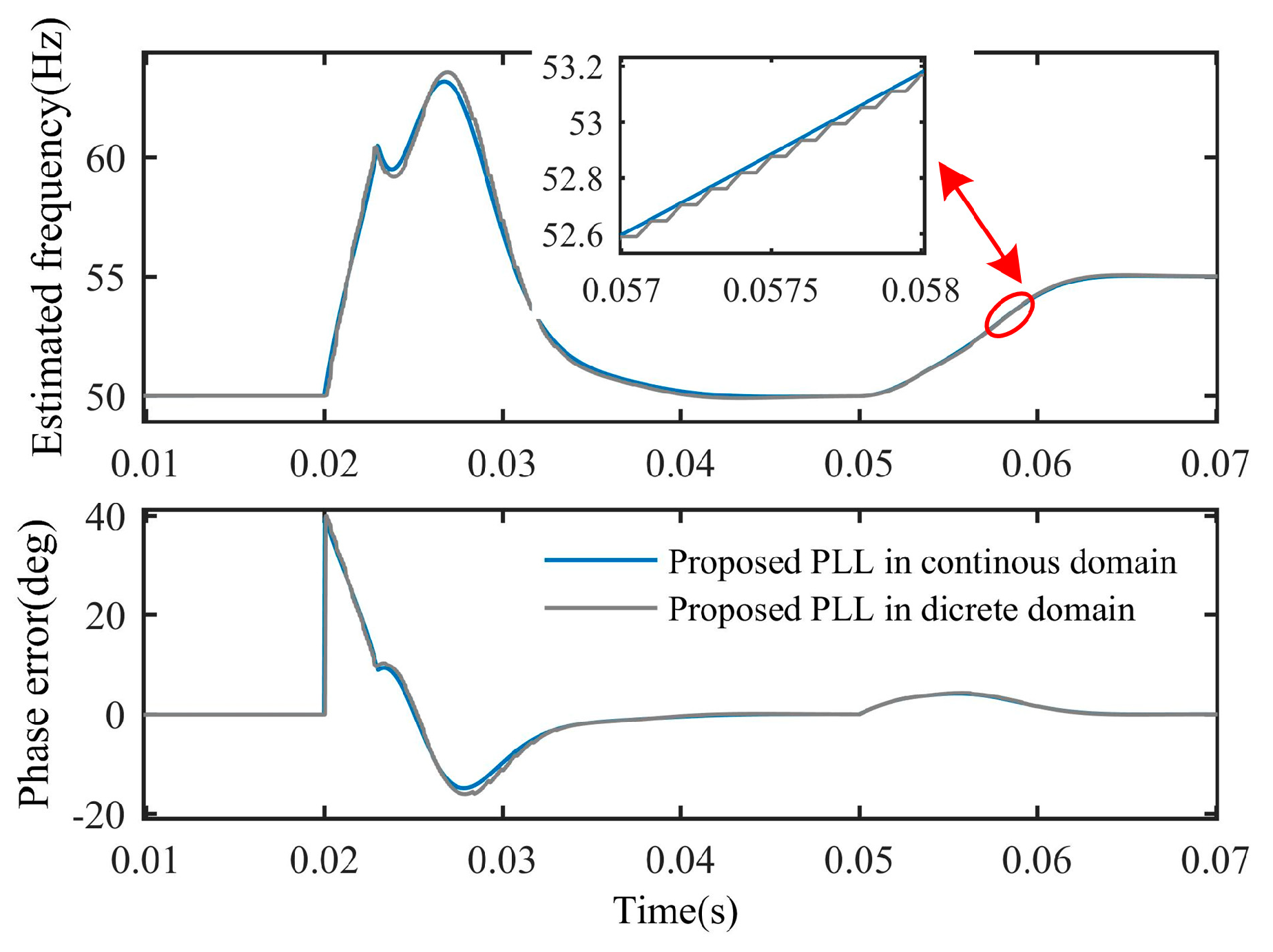
4.4. Digital Implementation
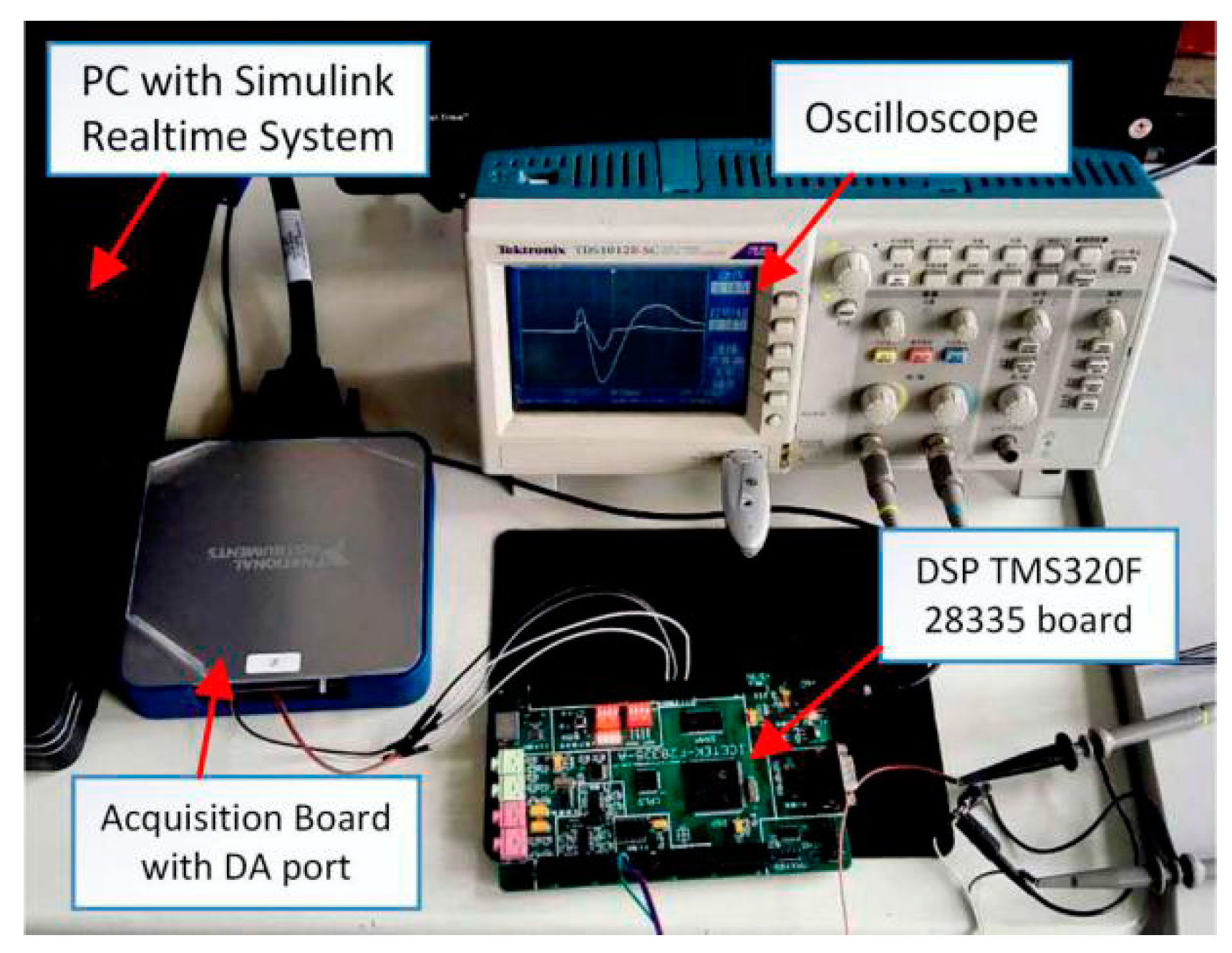
5. Experimental Results
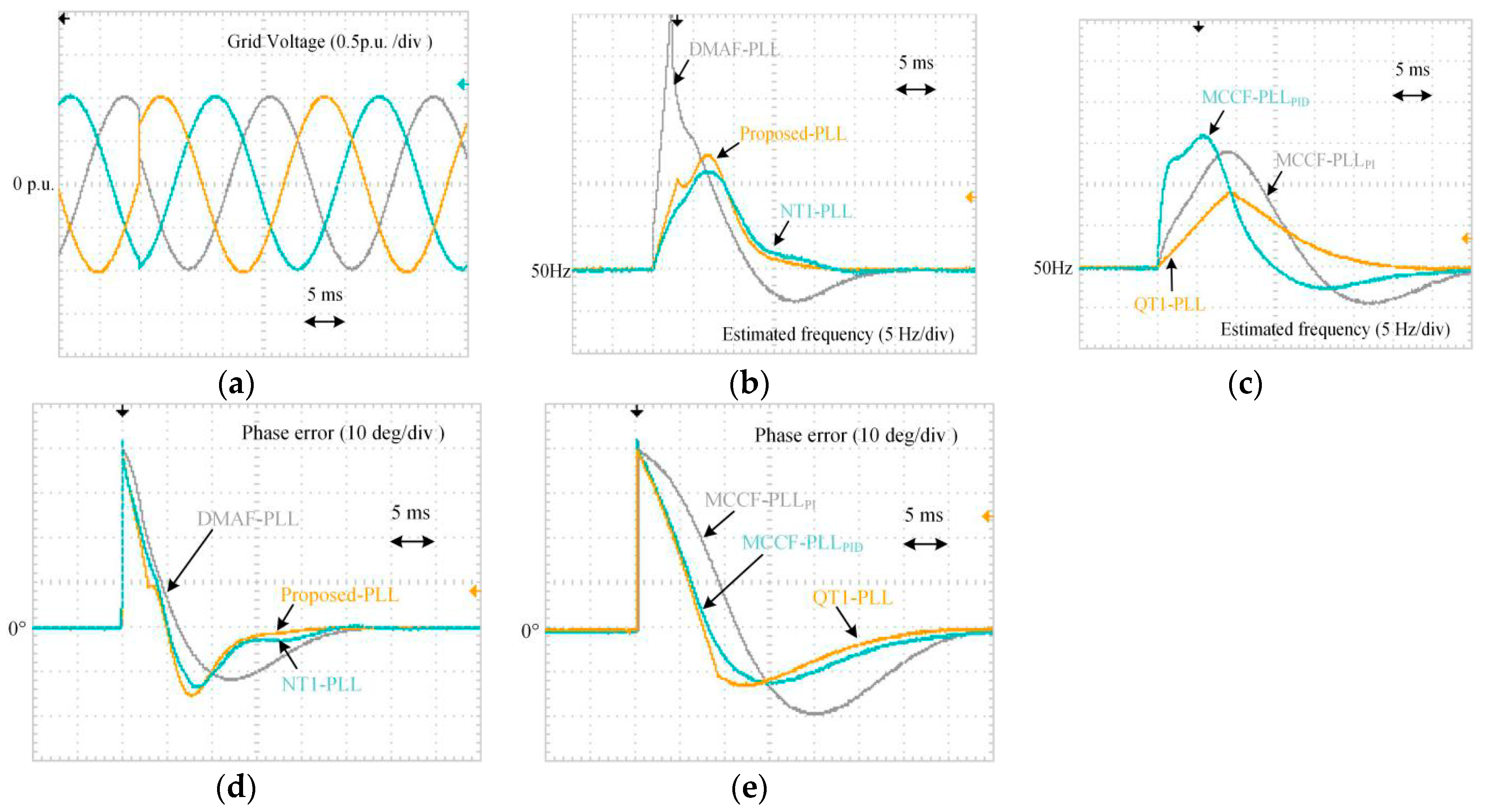
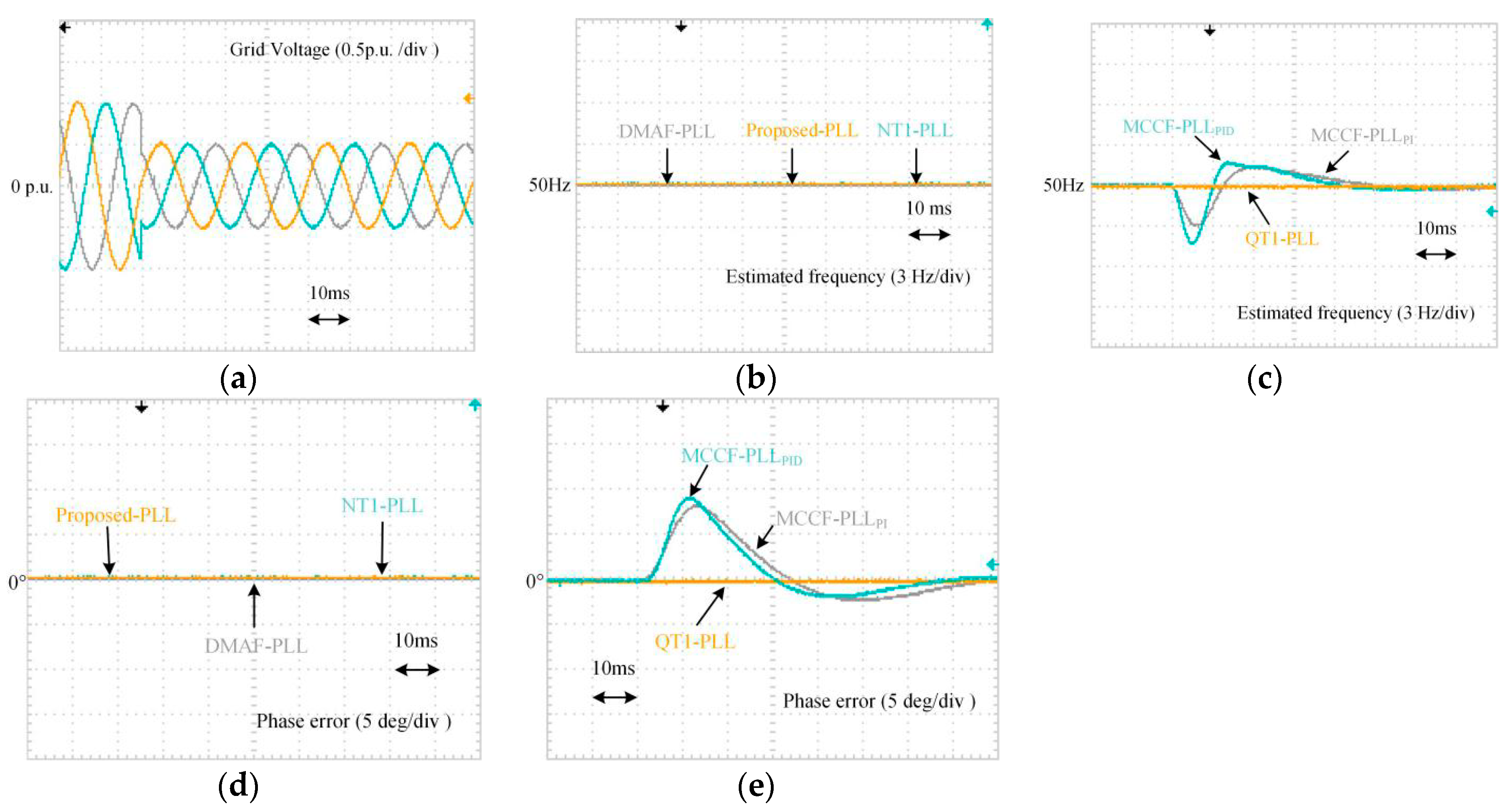
5.1. Phase Jump
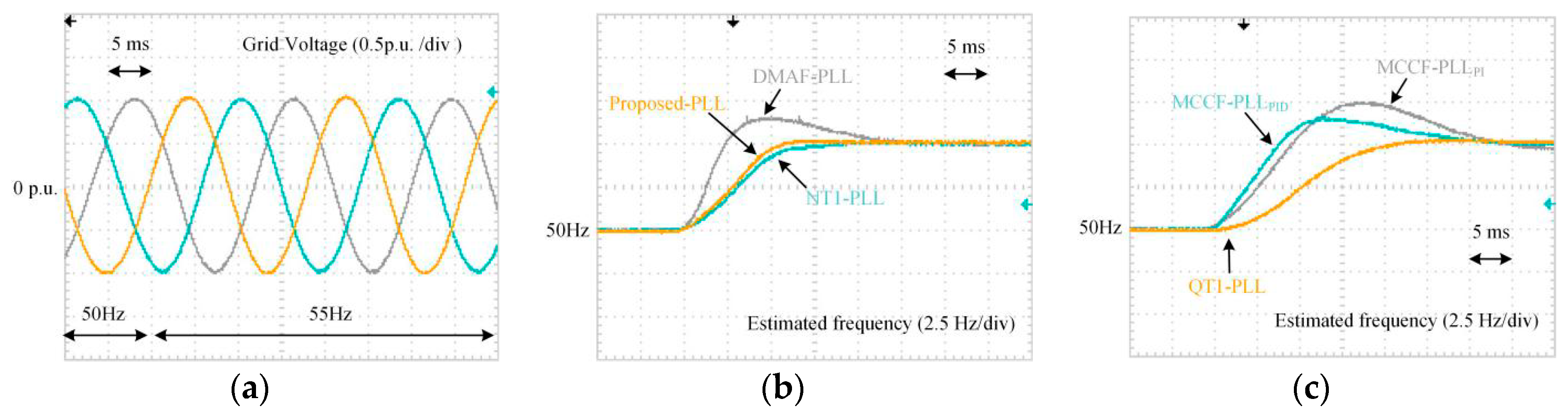
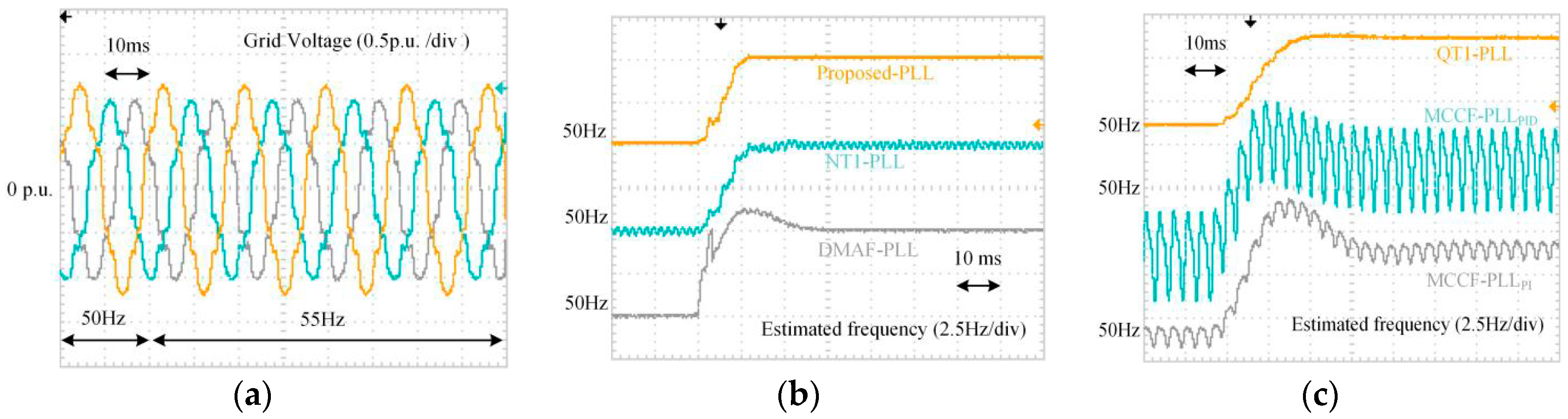
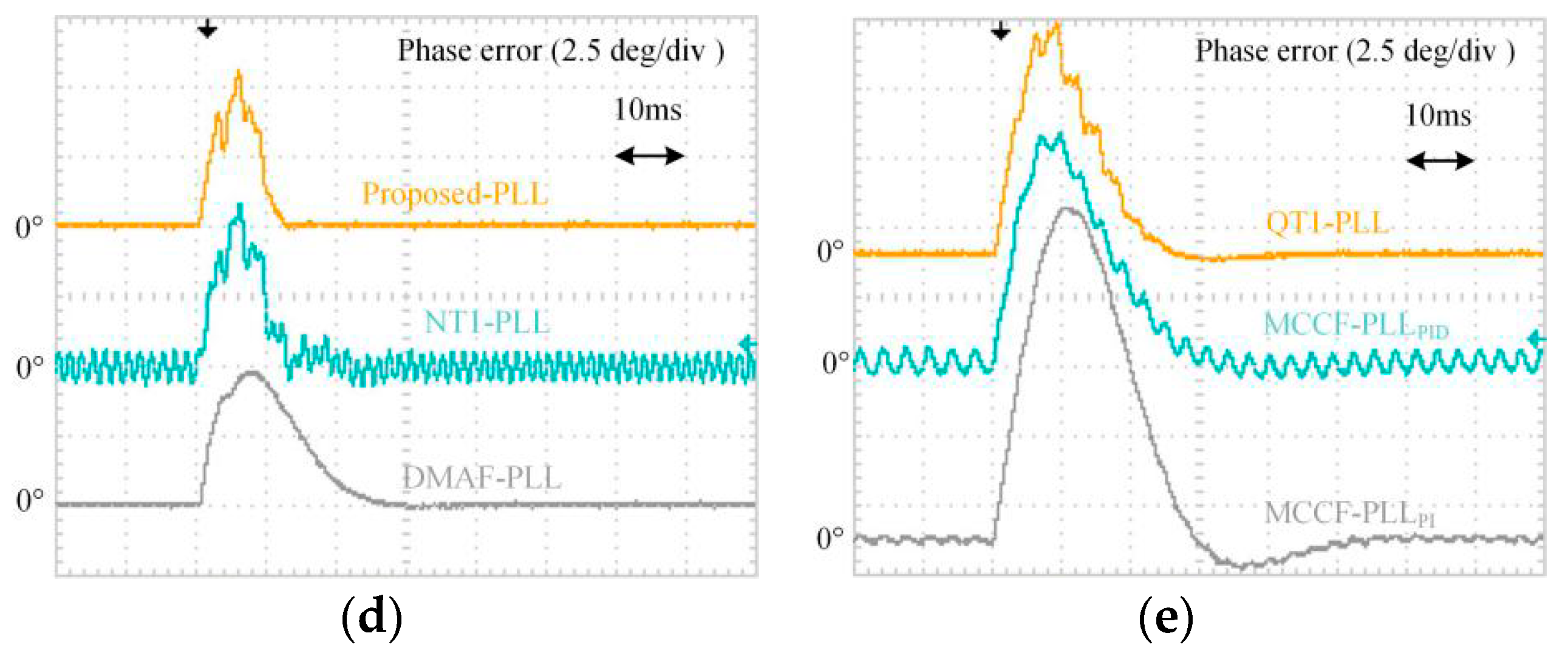
5.2. Frequency Step Change
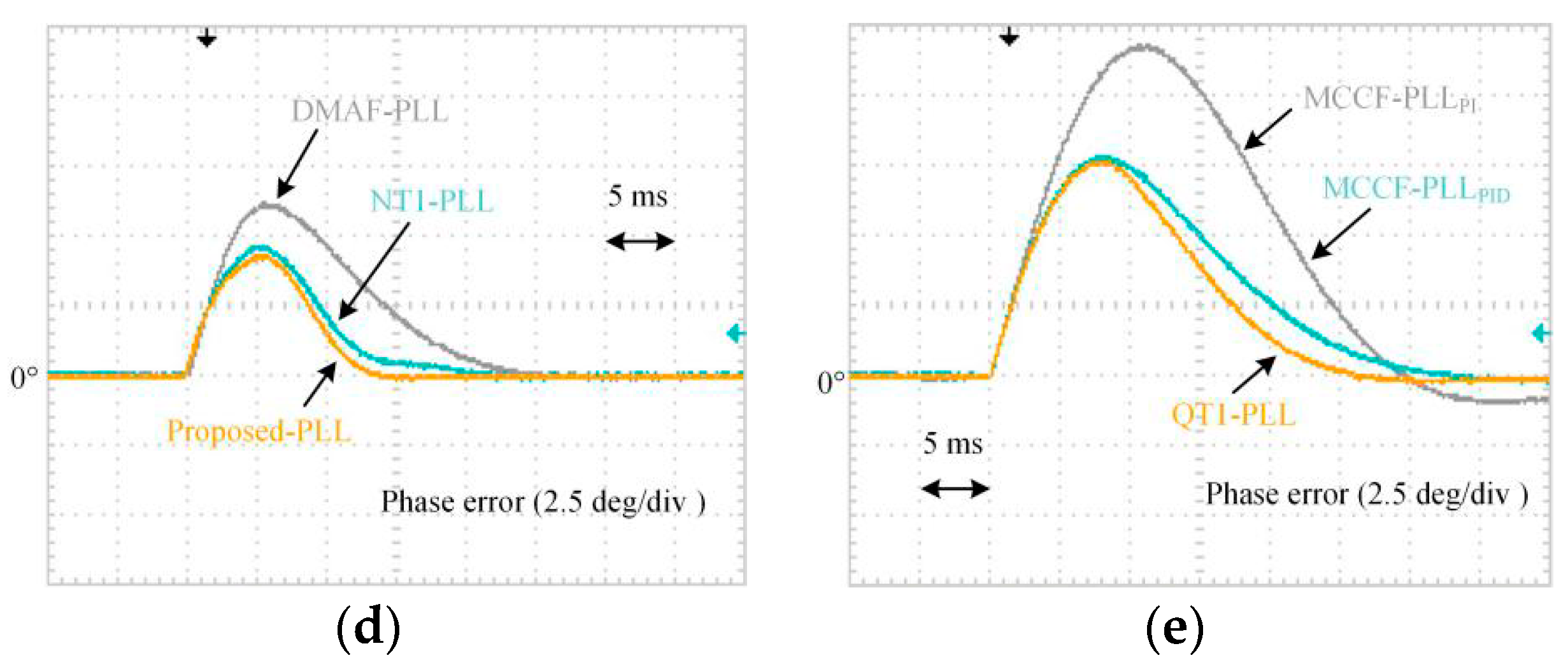
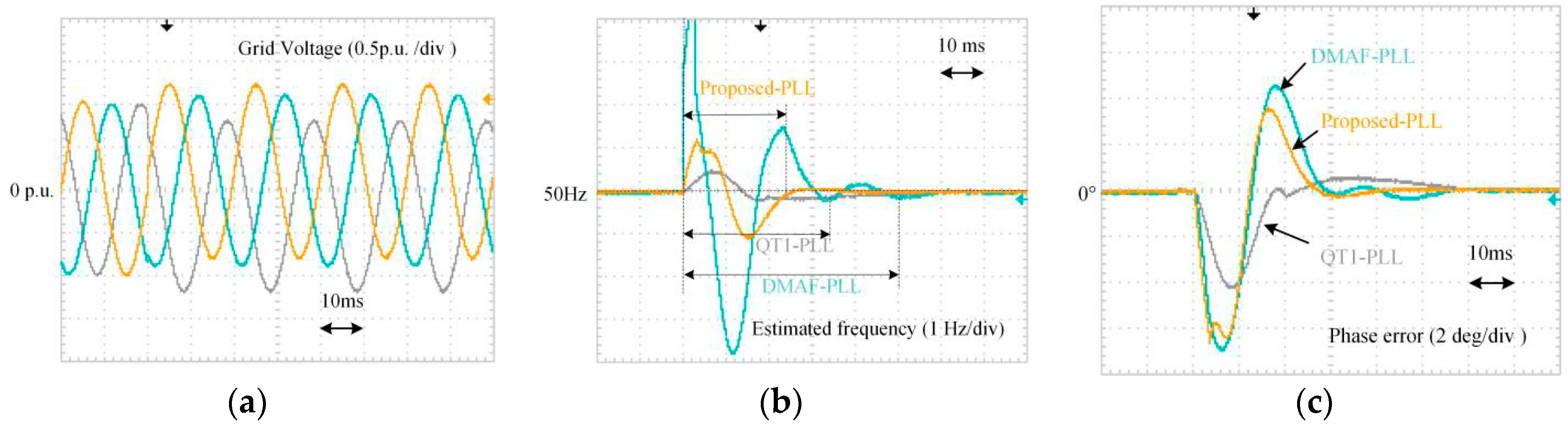
5.3. Frequency Ramp Change
5.4. Voltage Sag
5.5. Distorted Grid Voltages
5.6. Voltages with DC Offset
5.7. Summary
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Golestan, S.; Guerrero, J.M.; Vidal, A.; Yepes, A.G.; Doval-Gandoy, J.; Freijedo, F.D. Small-signal modeling, stability analysis and design optimization of single-phase delay-based plls. IEEE Trans. Power Electr. 2016, 31, 3517–3527. [Google Scholar] [CrossRef]
- Kulkarni, A.; John, V. Analysis of bandwidth-unit vector distortion trade off in PLL during abnormal grid conditions. IEEE Trans. Ind. Electron. 2013, 60, 5820–5829. [Google Scholar] [CrossRef]
- Batista, Y.N.; de Souza, H.E.P.; Neves, F.A.S.; Dias Filho, R.F.; Bradaschia, F. Variable-structure generalized delayed signal cancellation pll to improve convergence time. IEEE Trans. Ind. Electr. 2015, 62, 7146–7150. [Google Scholar] [CrossRef]
- Eodorescu, R.; Liserre, M.; Rodríguez, P. Grid Synchronization in Three-Phase Power Converters. Grid Convert. Photovolt. Wind Power Syst. 2010, 169–204. [Google Scholar] [CrossRef]
- Han, Y.; Xu, L.; Khan, M.M.; Yao, G.; Zhou, L.-D.; Chen, C. A novel synchronization scheme for grid-connected converters by using adaptive linear optimal filter based pll (alof–pll). Simul. Model. Pract. Theory 2009, 17, 1299–1345. [Google Scholar] [CrossRef]
- E. On Netz Gmbh. Grid Code-High and Extra High Voltage; E. On Netz Gmbh: Bayreuth, Germany, 2006; Available online: http://www.pvupscale.org/IMG/pdf/D4_2_DE_annex_A-3_EON_HV_grid__connection_requirements_ENENARHS2006de.pdf (accessed on 16 April 2018).
- De Espana, R.E. PO-12.3. Requisitos de Respuesta Frente a Huecos de Tension de las Instalaciones Eolicas; Comisión Nacional de Energía: Madrid, Spain, 2006. [Google Scholar]
- Guo, X.; Wu, W.; Chen, Z. Multiple-complex coefficient-filter-based phase-locked loop and synchronization technique for three-phase grid-interfaced converters in distributed utility networks. IEEE Trans. Ind. Electron. 2011, 58, 1194–1204. [Google Scholar] [CrossRef]
- Rodriguez, P.; Timbus, A.V.; Teodorescu, R.; Liserre, M.; Blaabjerg, F. Flexible Active Power Control of Distributed Power Generation Systems During Grid Faults. IEEE Trans. Ind. Electr. 2007, 54, 2583–2592. [Google Scholar] [CrossRef]
- Xiao, P.; Corzine, K.; Venayagamoorthy, G. Multiple reference frame-based control of three-phase PWM boost rectifiers under unbalanced and distorted input conditions. IEEE Trans. Power Electron. 2008, 23, 2006–2017. [Google Scholar] [CrossRef]
- Wang, J.; Liang, J.; Gao, F.; Zhang, L.; Wang, Z. A method to improve the dynamic performance of moving average filter-based pll. IEEE Trans. Power Electr. 2015, 30, 5978–5990. [Google Scholar] [CrossRef]
- IEEE Std. IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE: New York, NY, USA, 2003. [Google Scholar] [CrossRef]
- The Grid Code: Revision 31; National Grid Electricity Transmission: Warwick, UK, 2008.
- Golestan, S.; Freijedo, F.D.; Vidal, A.; Guerrero, J.M.; Doval-Gandoy, J. A quasi-type-1 phase-locked loop structure. IEEE Trans. Power Electr. 2014, 29, 6264–6270. [Google Scholar] [CrossRef]
- Li, Y.; Wang, D.; Han, W.; Tan, S.; Guo, X. Performance improvement of quasi-type-1 pll by using a complex notch filter. IEEE Access 2016, 4, 6272–6282. [Google Scholar] [CrossRef]
- Li, Y.; Wang, D.; Han, W.; Sun, Z.; Yuan, T. A hybrid filtering stage based quasi-type-1 pll under distorted grid conditions. J. Power Electron. 2017, 17, 704–715. [Google Scholar] [CrossRef]
- Golestan, S.; Freijedo, F.D.; Vidal, A.; Yepes, A.G.; Guerrero, J.M.; Doval-Gandoy, J. An efficient implementation of generalized delayed signal cancellation pll. IEEE Trans. Power Electr. 2016, 31, 1085–1094. [Google Scholar] [CrossRef]
- Hadjidemetriou, L.; Kyriakides, E.; Blaabjerg, F. An adaptive tuning mechanism for phase-locked loop algorithms for faster time performance of interconnected renewable energy sources. IEEE Trans. Ind. Appl. 2015, 51, 1792–1804. [Google Scholar] [CrossRef]
- Hadjidemetriou, L.; Kyriakides, E.; Blaabjerg, F. A robust synchronization to enhance the power quality of renewable energy systems. IEEE Trans. Ind. Electr. 2015, 62, 4858–4868. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, Q.; Hong, L. A novel three-phase software phase-locked loop based on frequency-locked loop and initial phase angle detection phase-locked loop. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Abusorrah, A.M.; Al-Turki, Y. Hybrid synchronous/stationary reference-frame-filtering-based pll. IEEE Trans. Ind. Electr. 2015, 62, 5018–5022. [Google Scholar] [CrossRef]
- Kanjiya, P.; Khadkikar, V.; Moursi, M.S.E. A novel type-1 frequency-locked loop for fast detection of frequency and phase with improved stability margins. IEEE Trans. Power Electr. 2016, 31, 2550–2561. [Google Scholar] [CrossRef]
- Gonzalez-Espin, F.; Figueres, E.; Garcera, G. An adaptive synchronous-reference-frame phase-locked loop for power quality improvement in a polluted utility grid. IEEE Trans. Ind. Electron. 2012, 59, 2718–2731. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F.; Guerrero, J. Advanced and challenges of a type-3 PLL. IEEE Trans. Power Electron. 2013, 28, 4985–4997. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F. Design-oriented study of advanced synchronous reference frame phase-locked loops. IEEE Trans. Power Electron. 2013, 28, 765–778. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.; Abusorrah, A. MAF-PLL with phase-lead compensator. IEEE Trans. Ind. Electron. 2015, 62, 3691–3695. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vidal, A.; Yepes, A.G.; Doval-Gandoy, J. Pll with maf-based prefiltering stage: Small-signal modeling and performance enhancement. IEEE Trans. Power Electr. 2016, 31, 4013–4019. [Google Scholar] [CrossRef]
- Golestan, S.; Ramezani, M.; Guerrero, J.M.; Freijedo, F.D.; Monfared, M. Moving average filter based phase-locked loops: Performance analysis and design guidelines. IEEE Trans. Power Electr. 2014, 29, 2750–2763. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F.; Guerrero, J. Performance improvement of a prefiltered synchronous- reference-frame pll by using a PID-type loop filter. IEEE Trans. Power Electron. 2014, 61, 3469–3479. [Google Scholar] [CrossRef]
- Tsili, M.; Papathanassiou, S. A review of grid code technical requirements for wind farms. IET Renew. Power Gener. 2009, 3, 308. [Google Scholar] [CrossRef]
- Luna, A.; Rocabert, J.; Candela, J.; Hermoso, J.; Teodorescu, R.; Blaabjerg, F.; Rodriguez, P. Grid voltage synchronization for distributed generation systems under grid faults conditions. IEEE Trans. Ind. Appl. 2015, 51, 3414–3425. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
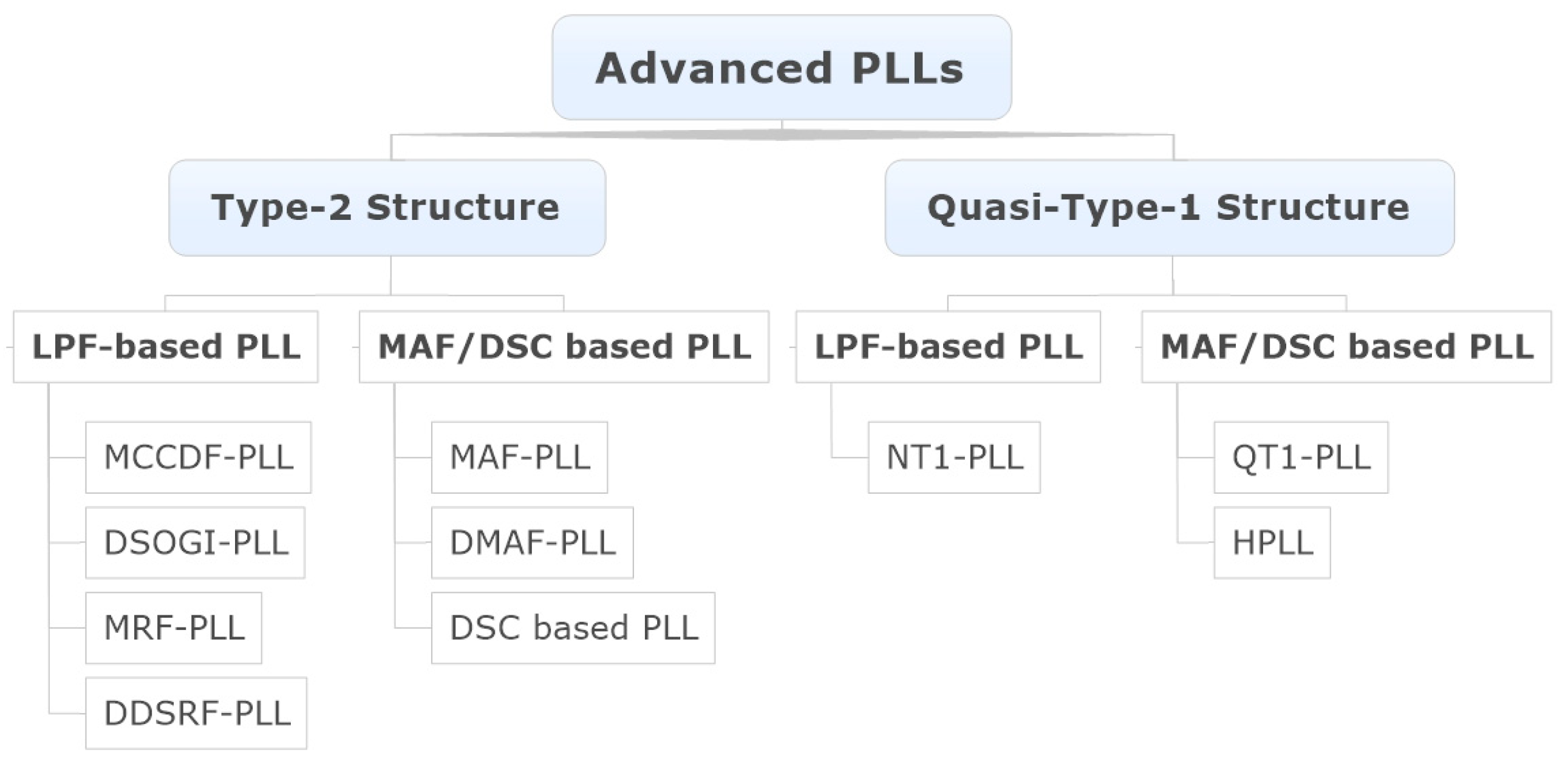
| Control Structure | Sub-Classification | Ideal Filtering Capability | Dynamic Response | |
|---|---|---|---|---|
| Type-2 Structure | LPF-based PLLs | MCCF-PLL | No | Slow |
| DSOGI-PLL | No | Slow | ||
| MRF-PLL | No | Slow | ||
| DDSRF-PLL | No | Slow | ||
| MAF/DSC based PLLs | MAF-PLL | Yes | Slow | |
| DSC-based PLLs | Yes | Slow | ||
| DMAF-PLL | Yes | Average | ||
| Quasi-Type-1 Structure | MAF based PLLs | QT1-PLL | Yes | Average |
| LPF-based PLLs | NT1-PLL | No | Fast | |
| Harmonic order | … | −11 | −5 | −1 | +1 | +7 | +13 | … |
| αβ-frame (Hz) | … | −550 | −250 | −50 | 50 | 350 | 650 | … |
| Harmonic order | … | −12 | −6 | −2 | 0 | +6 | +12 | … |
| dq-frame (Hz) | … | −600 | −300 | −100 | 0 | 300 | 600 | … |
| Operator | +/− | ×/÷ | Sorted Samples |
|---|---|---|---|
| Proposed PLL | 10 | 10 | 66 |
| QT1-PLL | 2 | 4 | 202 |
| Voltage Sequences (in αβ-Frame) | Amplitude (p.u.) |
|---|---|
| FFPS (+50 Hz) | 1 |
| FFNS (−50 Hz) | 0.1 |
| −5th voltage sequence (−250 Hz) | 0.1 |
| +7th voltage sequence (+350 Hz) | 0.05 |
| −11th voltage sequence (−550 Hz) | 0.05 |
| +13th voltage sequence (+650 Hz) | 0.05 |
| Advanced PLL | MCCF-PLLPID | MCCF-PLLPI | QT1-PLL | DMAF-PLL | NT1-PLL | Proposed PLL |
|---|---|---|---|---|---|---|
| Phase jump (+40°) | - | - | - | - | - | - |
| Settling time (2%) | ≈1.81 cycles | ≈2.5 cycles | ≈1.5 cycles | ≈1.25 cycles | ≈1.1 cycles | ≈0.92 cycles |
| Peak phase-error | 11.4° (28.5%) | 18.74° (46.8%) | 12.2° (30.6%) | 11.5° (28.8%) | 13.2° (33%) | 14.8° (37%) |
| Peak frequency deviation | 16.1 Hz | 14.2 Hz | 8.9 Hz | 33.8 Hz | 11.5 Hz | 13.1 Hz |
| Frequency jump (+5 Hz) | - | - | - | - | - | - |
| Settling time of estimated frequency (2%) | ≈1.74 cycles | ≈2.6 cycles | ≈1.6 cycles | ≈1.3 cycles | ≈0.85 cycles | ≈0.7 cycles |
| Peak phase-error | 7.9° | 12.4° | 7.6° | 6.1° | 4.5° | 4.1° |
| Peak frequency deviation | 1.6 Hz (32%) | 2.5 Hz (50%) | 0 Hz (0%) | 1.6 Hz (32%) | 0 Hz (0%) | 0 Hz (0%) |
| Frequency ramp change (+100 Hz/s) | - | - | - | - | - | - |
| Phase-error | 2.3° | 3.8° | 1.9° | 1.4° | 0.8° | 0.7° |
| Voltage sag (0.5 p.u.) | - | - | - | - | - | - |
| Settling time of phase-error (1°) | ≈2.7 cycles | ≈3.3 cycles | 0 cycle | ≈2 cycles | 0 cycle | 0 cycle |
| Peak phase-error | 9.2° | 8.2° | 0° | −12.7° | 0° | 0° |
| Peak frequency deviation | −4.4 Hz | −3.1 Hz | 0 Hz | 13.5 Hz | 0 Hz | 0 Hz |
| Distorted grid voltage | - | - | - | - | - | - |
| Peak-to-peak phase-error | 0.7° | 0.2° | 0° | 0° | 1° | 0° |
| Peak-to-peak frequency error | 4.5 Hz | 1.1 Hz | 0 Hz | 0 Hz | 0.4 Hz | 0 Hz |
| DC offset injection | - | - | - | - | - | - |
| 0.2 Hz settling time of estimated frequency | - | - | ≈1.7 cycles | ≈2.5 cycles | - | ≈1.2 cycles |
| Phase margin | 55.4° | 39.3° | 45° | 43° | 69.9° | 45.3° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Yang, J.; Wang, H.; Ge, W.; Ma, Y. Leveraging Hybrid Filter for Improving Quasi-Type-1 Phase Locked Loop Targeting Fast Transient Response. Energies 2018, 11, 2472. https://doi.org/10.3390/en11092472
Li Y, Yang J, Wang H, Ge W, Ma Y. Leveraging Hybrid Filter for Improving Quasi-Type-1 Phase Locked Loop Targeting Fast Transient Response. Energies. 2018; 11(9):2472. https://doi.org/10.3390/en11092472
Chicago/Turabian StyleLi, Yunlu, Junyou Yang, Haixin Wang, Weichun Ge, and Yiming Ma. 2018. "Leveraging Hybrid Filter for Improving Quasi-Type-1 Phase Locked Loop Targeting Fast Transient Response" Energies 11, no. 9: 2472. https://doi.org/10.3390/en11092472
APA StyleLi, Y., Yang, J., Wang, H., Ge, W., & Ma, Y. (2018). Leveraging Hybrid Filter for Improving Quasi-Type-1 Phase Locked Loop Targeting Fast Transient Response. Energies, 11(9), 2472. https://doi.org/10.3390/en11092472