Synchronous Resonant Control Technique to Address Power Grid Instability Problems Due to High Renewables Penetration


 , , and
, , and
Abstract
:1. Introduction
2. The Proposed Control Technique
A. The Proposed Dynamic Model Analysis
B. The Proposed SAPIRC-Based Controller
3. Assessment of the Power Converter Currents
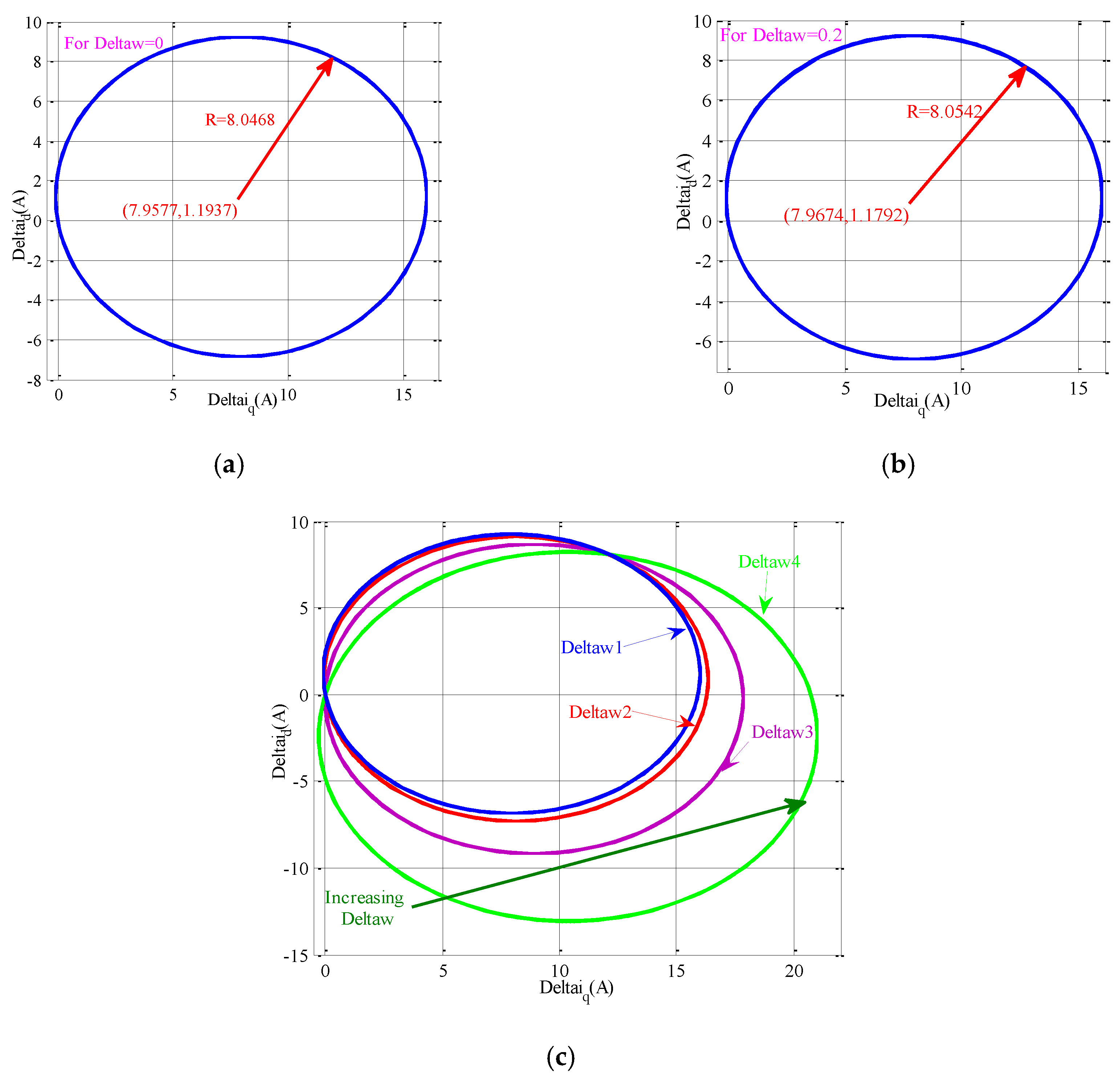
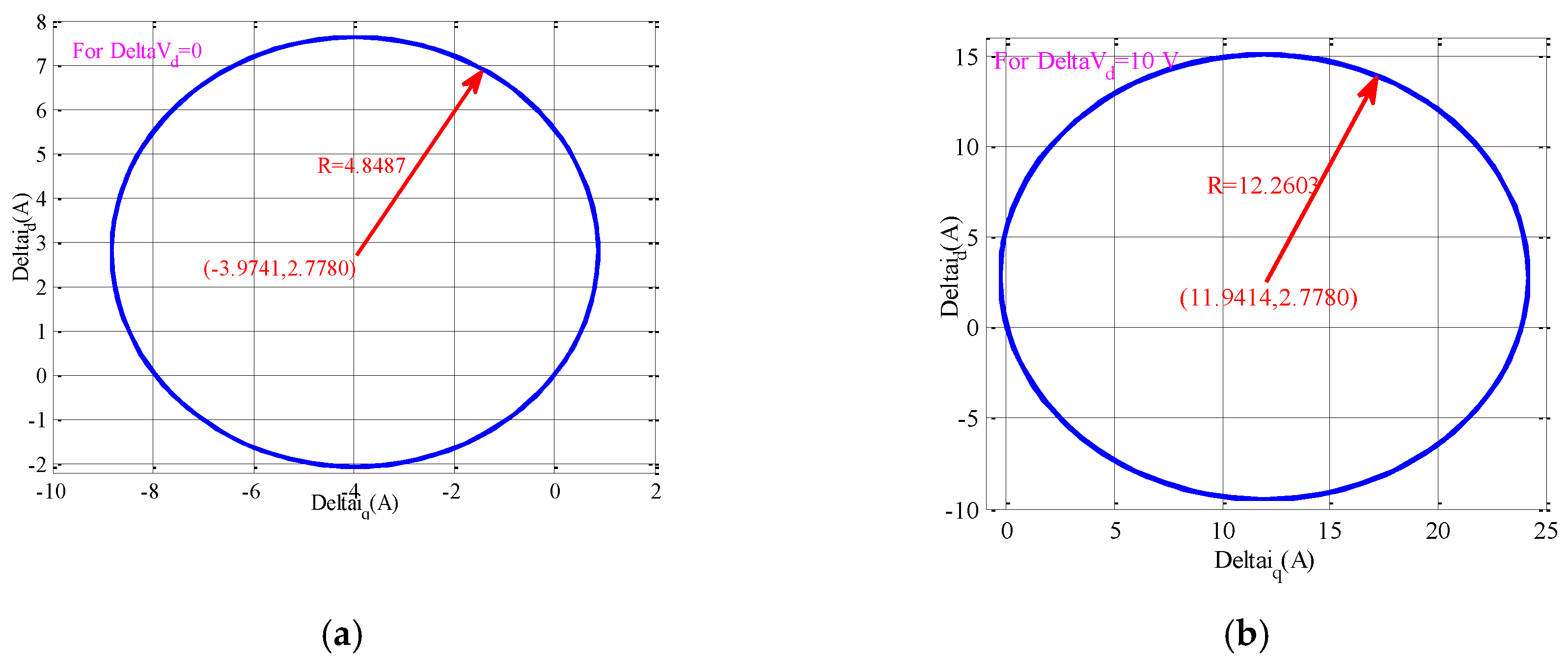
4. Assessment of the Proposed Current Perturbation Curve (CPC)
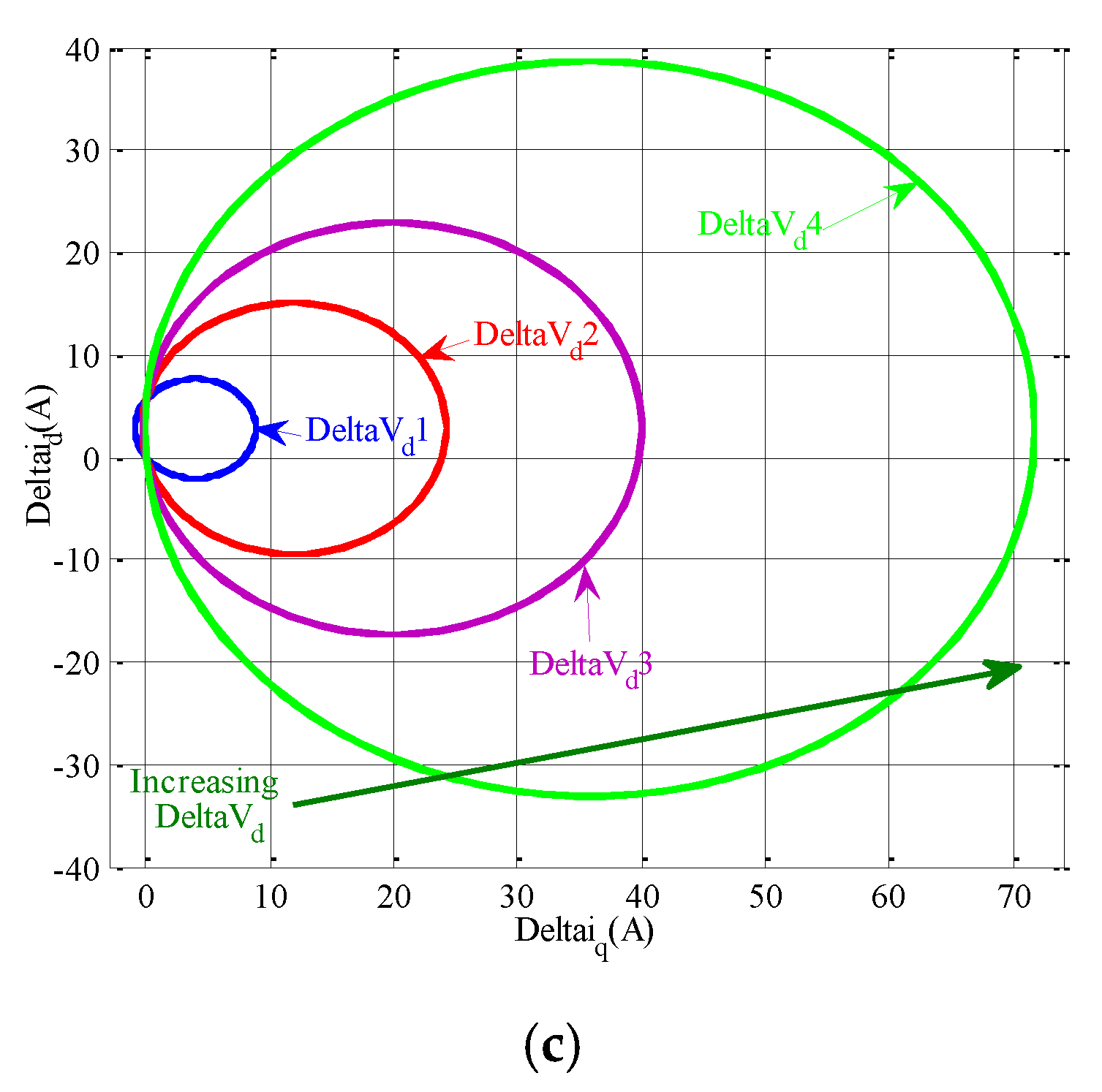
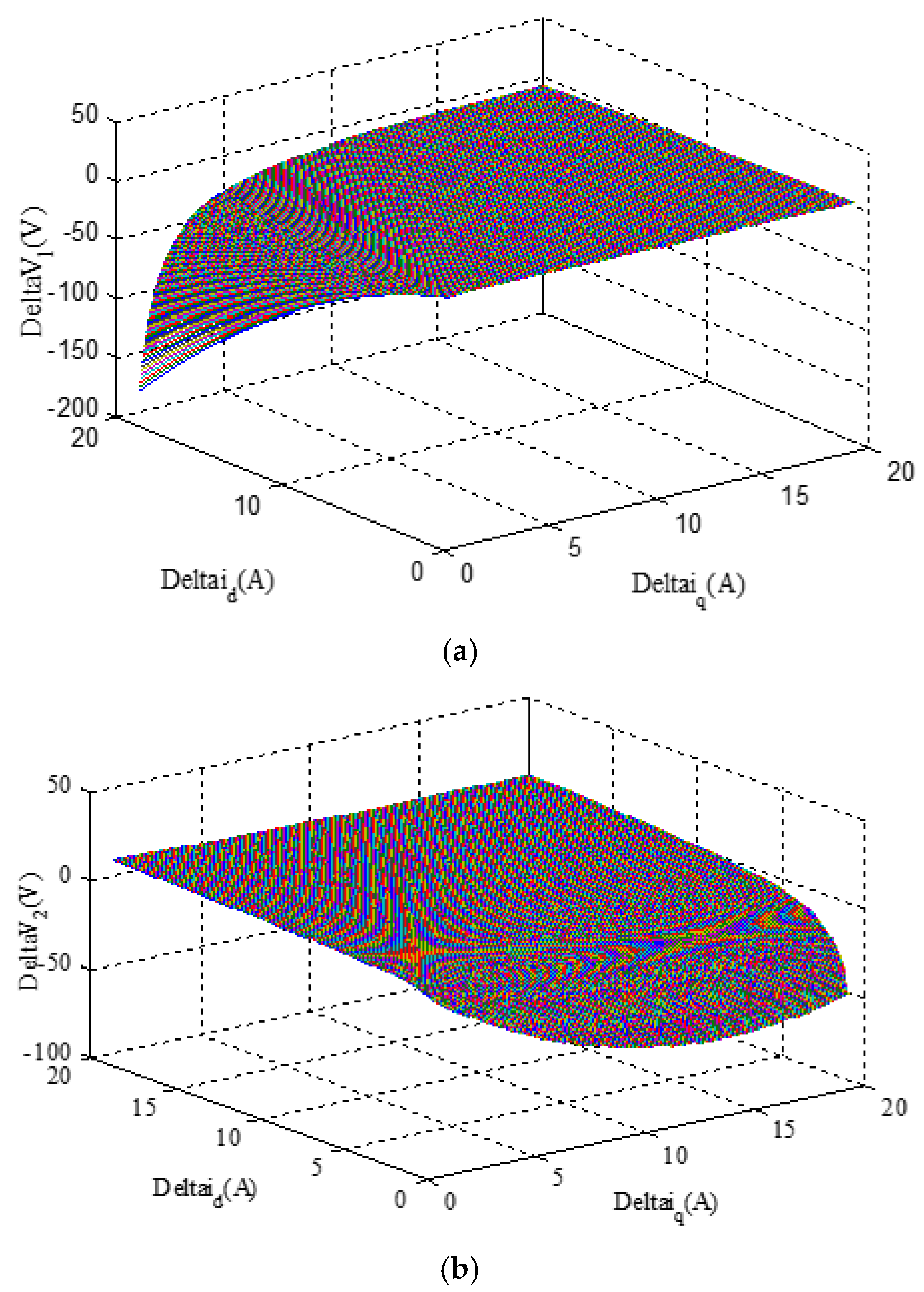
5. Effects of the Current Perturbation Components on the Load-Based Voltage.
6. Results and Discussion
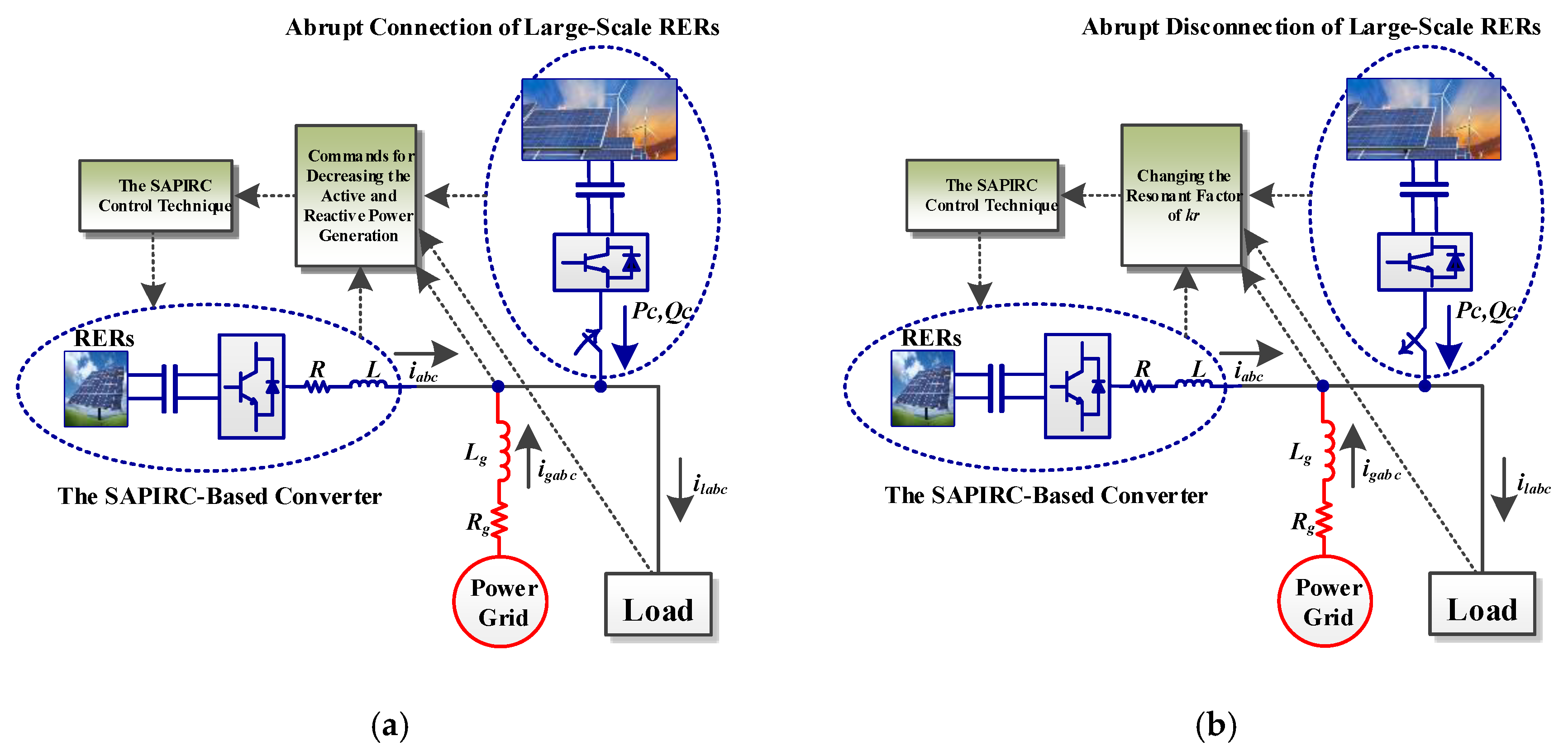
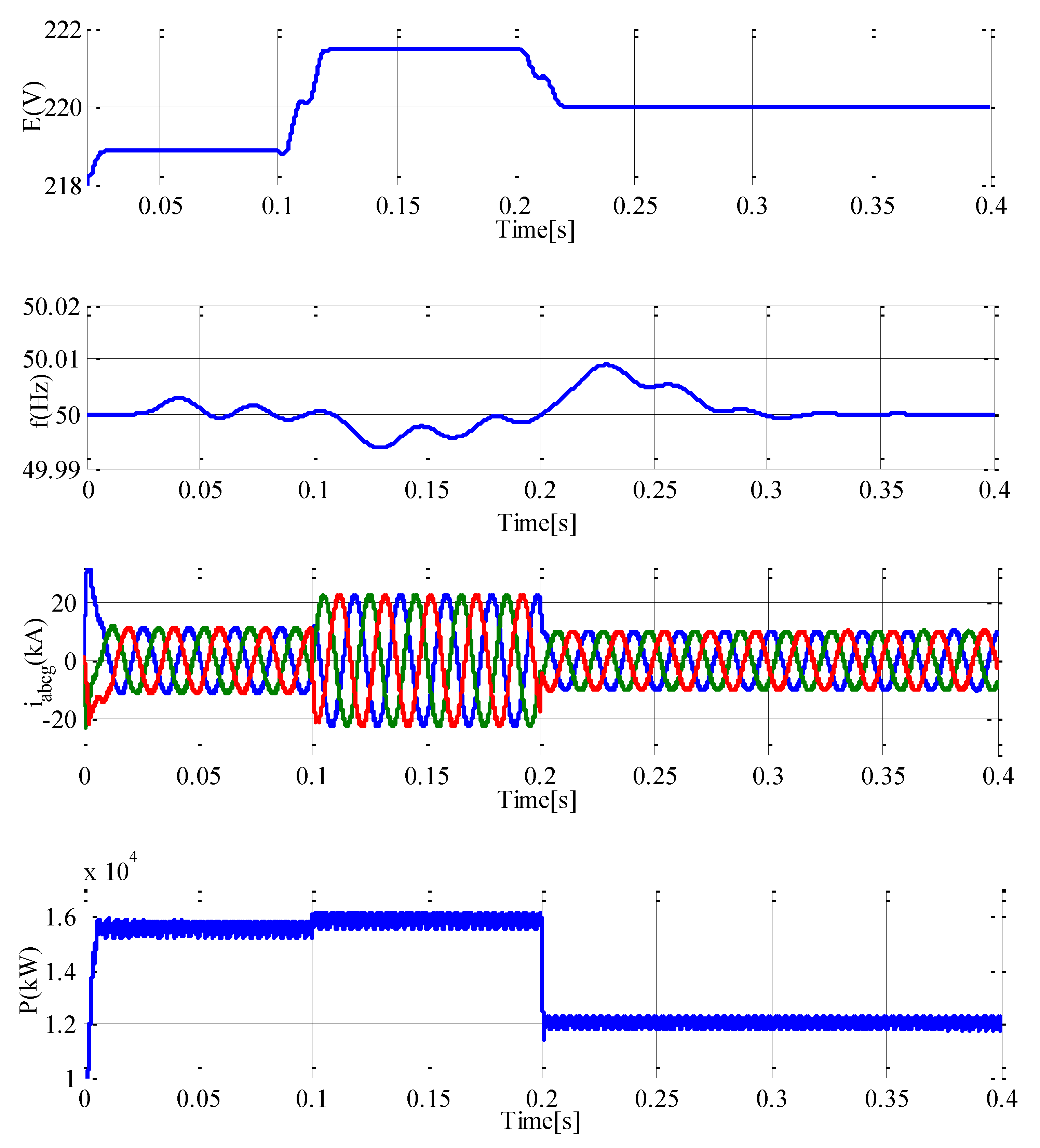
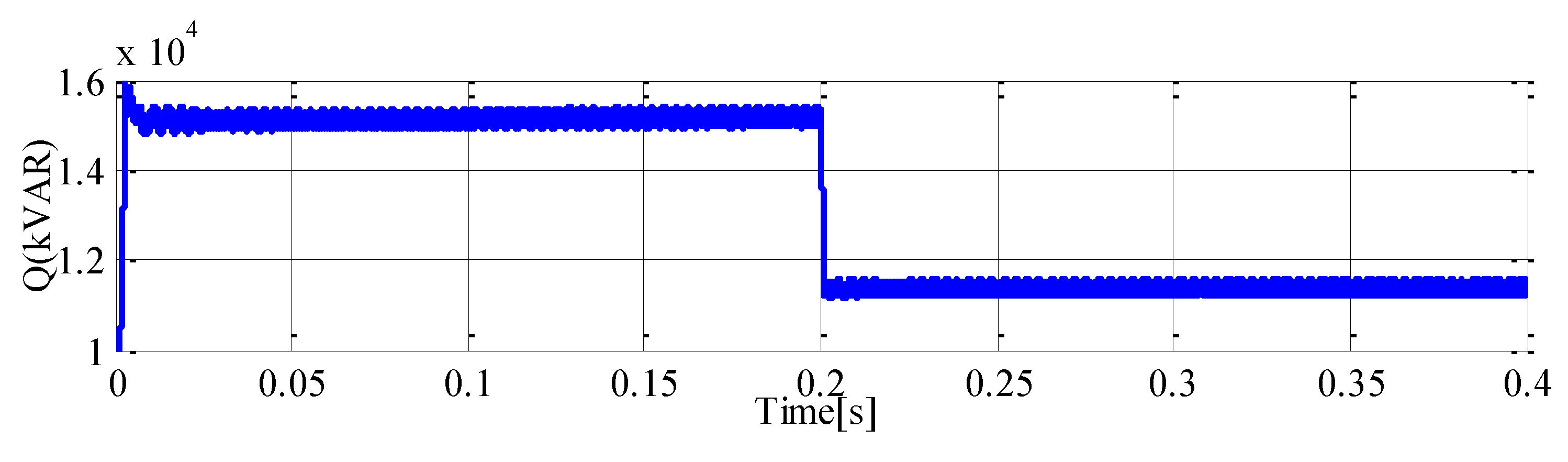
A. Effects of the Sudden Connection of Large-Scale RERs
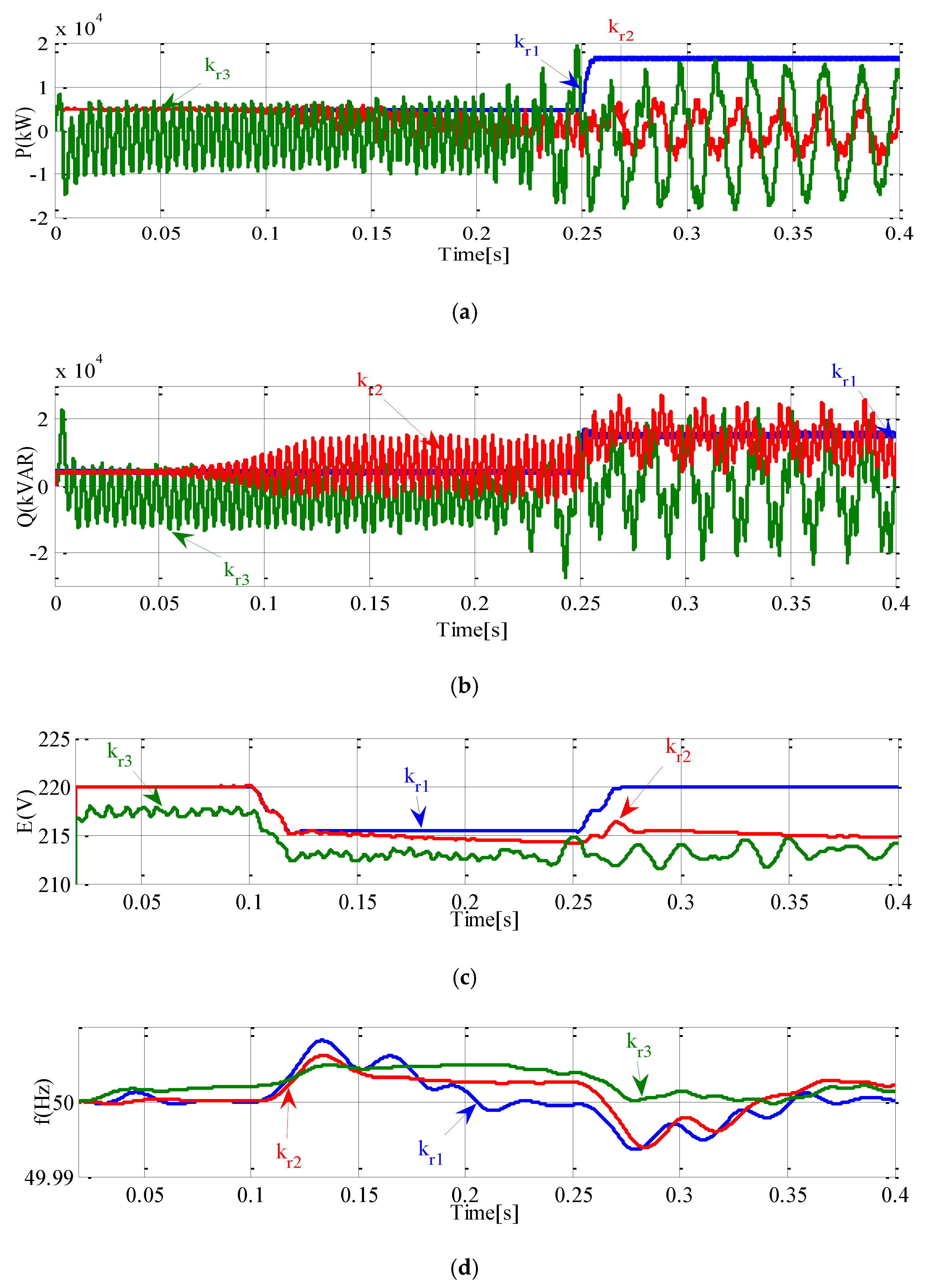
B. Assessment of the Effects of Resonant Factor Variations
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Parameters | |
| Rg | Grid Resistance |
| Lg | Grid Inductance |
| J | Moment of Inertia |
| Variables | |
| idq | Converter Currents |
| ildq | Load Currents |
| igdq | Grid Currents |
| Δidq | Perturbation Components of idq |
| Δildq | Perturbation Components of ildq |
| Δigdq | Perturbation Components of igdq |
| vdq | Converter Voltage Magnitudes |
| vgdq | Grid Voltage Magnitudes |
| v12 | Load-Based Voltages |
| Δvdq | Perturbation Components of vdq |
| Δv12 | Perturbation Components of v12 |
| Δvgdq | Perturbation Components of vgdq |
| Pm | Mechanical Power |
| P, Q, S | Active, Reactive and Apparent Power of SAPIRC-Based Converter |
| ω | Grid Angular Frequency |
| ΔP, ΔQ | Perturbation Components of P and Q |
| ΔPm | Perturbation Components of Pm |
| Δω | Perturbation Components of ω |
| i*dq | Reference Values of idq |
| v*dq | Reference Values of vdq |
| P*, Q* | Reference Values of P,Q |
| P*m | Reference Values of Pm |
| ω* | Reference Values of ω |
| Δi*dq | Reference Values of Δidq |
| kpdq, kidq | PI Controller Coefficients |
| kr | Resonant Factor |
| ω0, ωc | Frequencies of Resonant Controller |
| Abbreviation | |
| SAPIRC | Synchronous Active Proportional Integral Resonant Controller |
| PMSG | Permanent Magnet Synchronous Generator |
| CPC | Current Perturbation Curve |
| RERs | Renewable Energy Resources |
| LPF | Low Pass Filter |
| PI | Proportional Integral |
| PV | Photovoltaic |
References
- Valenciaga, F.; Puleston, P.F.; Battaiotto, P.E.; Mantz, R.J. Passivity/sliding mode control of a stand-alone hybrid generation system. IEE Proc.—Control Theory Appl. 2000, 147, 680–686. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Robust optimal power management system for a hybrid AC/DC micro-grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Analysis and detection of a wind system failure in a micro-grid. J. Renew. Sustain. Energy 2016, 8. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Zabihi, S.; Rodrigues, E.M.G.; Catalao, J.P.S. A control strategy for the stable operation of shunt active power filters in power grids. Energy 2016, 96, 325–334. [Google Scholar] [CrossRef]
- Pouresmaeil, E.; Mehrasa, M.; Shokridehaki, M.A.; Rodrigues, E.M.G.; Catalao, J.P.S. Control and stability analysis of interfaced converter in distributed generation technology. In Proceedings of the IEEE EUROCON 2015—International Conference on Computer as a Tool (EUROCON), Salamanca, Spain, 8–11 September 2015; pp. 1–6. [Google Scholar]
- Pouresmaeil, E.; Mehrasa, M.; Erdinc, O.; Catalao, J.P.S. A control algorithm for the stable operation of interfaced converters in microgrid systems. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Istanbul, Turkey, 12–15 October 2014; pp. 1–6. [Google Scholar]
- Mei, J.; Xiao, B.; Shen, K.; Tolbert, L.M.; Zheng, J.Y. Modular multilevel inverter with new modulation method and its application to photovoltaic grid-connected generator. IEEE Trans. Power Electron. 2013, 28, 5063–5073. [Google Scholar] [CrossRef]
- Pouresmaeil, E.; Mehrasa, M.; Shokridehaki, M.A.; Rodrigues, E.M.G.; Catalao, J.P.S. Control of modular multilevel converters for integration of distributed generation sources into the power grid. In Proceedings of the IEEE International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 17–19 August 2015; pp. 1–6. [Google Scholar]
- Hasanzadeh, A.; Edrington, C.S.; Stroupe, N.; Bevis, T. Real-time emulation of a high-speed microturbine permanent-magnet synchronous generator using multiplatform hardware-in-the-loop realization. IEEE Trans. Ind. Electron. 2014, 61, 3109–3118. [Google Scholar] [CrossRef]
- Griffo, A.; Drury, D. Hardware in the loop emulation of synchronous generators for aircraft power systems. Electr. Syst. Aircr. Railw. Ship Propuls. (ESARS) 2012. [Google Scholar] [CrossRef]
- Valencia, F.; Puleston, P.F. Variable structure control of a wind energy conversion system based on a brushless doubly fed reluctance generator. IEEE Trans. Energy Convers. 2007, 22, 499–506. [Google Scholar] [CrossRef]
- Valencia, F.; Puleston, P.F.; Battaiotto, P.E. Power control of a photovoltaic array in a hybrid electric generation system using sliding mode techniques. IEE Proc. Control Theory Appl. 2001, 148, 448–455. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Double integral sliding mode MPPT control of a photovoltaic system. IEEE Trans. Control Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Determination of maximum solar power under shading and converter faults—A prerequisite for failure-tolerant power management systems. Simul. Model. Pract. Theory 2016, 62, 14–30. [Google Scholar] [CrossRef]
- Torres, M.A.; Lopes, L.A.; Moran, L.A.; Espinoza, J.R. Self-tuning virtual synchronous machine: A control strategy for energy storage systems to support dynamic frequency control. IEEE Trans. Energy Convers 2014, 29, 833–840. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. A virtual synchronous machine implementation for distributed control of power converters in smart grids. Electric Power Syst Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- Sarkar, M.N.I.; Meegahapola, L.G.; Datta, M. Reactive power management in renewable rich power grids: A review of grid-codes, renewable generators, support devices, control strategies and optimization algorithms. IEEE Access 2018, 6, 41458–41489. [Google Scholar] [CrossRef]
- Ou, T.C.; Hong, C.M. Dynamic operation and control of microgrid hybrid power systems. Energy 2014, 66, 314–323. [Google Scholar] [CrossRef]
- Hong, C.M.; Ou, T.C.; Lu, K.H. Development of intelligent MPPT (maximum power point tracking) control for a grid-connected hybrid power generation system. Energy 2013, 50, 270–279. [Google Scholar] [CrossRef]
- Lin, W.M.; Hong, C.M.; Ou, T.C.; Chiu, T.M. Hybrid intelligent control of PMSG wind generation system using pitch angle control with RBFN. Energy Convers. Manag. 2011, 52, 1244–1251. [Google Scholar] [CrossRef]
- Ou, T.C.; Lu, K.H.; Huang, C.J. Improvement of transient stability in a hybrid power multi-system using a designed NIDC (Novel Intelligent Damping Controller). Energies 2017, 10, 488. [Google Scholar] [CrossRef]
- Ou, T.C. A novel unsymmetrical faults analysis for microgrid distribution systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1017–1024. [Google Scholar] [CrossRef]
- Ou, T.C. Ground fault current analysis with a direct building algorithm for microgrid distribution. Int. J. Electr. Power Energy Syst. 2013, 53, 867–875. [Google Scholar] [CrossRef]
- Lyu, X.; Zhao, J.; Jia, Y.; Xu, Z.; Wong, K.P. Coordinated control strategies of PMSG-based wind turbine for smoothing power fluctuations. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- Mendis, N.; Muttaqi, K.M.; Perera, S. Management of battery-supercapacitor hybrid energy storage and synchronous condenser for isolated operation of PMSG based variable-speed wind turbine generating systems. IEEE Trans. Smart Grid 2014, 5, 944–953. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y.; Xu, N.; Liu, Y.; Wang, W.; Wang, H.; Lei, W. A novel virtual synchronous generator control strategy based on improved swing equation emulating and power decoupling method. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar]
- Mehrasa, M.; Gordina, R.; Pouresmaeil, E.; Vechiu, I.; Rodrigues, R.L.; Catalao, J.P.S. Synchronous active proportional resonant-based control technique for high penetration of distributed generation units into power grids. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017. [Google Scholar] [CrossRef]
- Pouresmaeil, E.; Mehrasa, M.; Gordina, R.; Vechiu, I.; Rodrigues, R.L.; Catalao, J.P.S. Double synchronous controller for integration of large-scale renewable energy sources into a low-inertia power grid. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Stability assessment and optimization methods for microgrid with multiple VSG units. IEEE Trans. Smart Grid 2016, 9, 1462–1471. [Google Scholar] [CrossRef]
- Hou, X.; Han, H.; Zhong, C.; Yuan, W.; Yi, M.; Chen, Y. Improvement of transient stability in inverter-based AC microgrid via adaptive virtual inertia. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Chamana, M.; Chowdhury, B.H.; Jahanbakhsh, F. Distributed control of voltage regulating devices in the presence of high PV penetration to mitigate ramp-rate issues. IEEE Trans. Smart Grid 2018, 9, 1086–1095. [Google Scholar] [CrossRef]
- Arricibita, D.; Sanchis, P.; Marroyo, L. Virtual synchronous generators classification and common trends. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 2433–2438. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Tan, S.; Lv, Q.; Geng, H.; Yang, G. An equivalent synchronous generator model for current-controlled voltage source converters considering the dynamic of phase-locked-loop. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 2235–2240. [Google Scholar] [CrossRef]
- Guan, M.; Pan, W.; Zhang, J.; Hao, Q.; Cheng, J.; Zheng, X. Synchronous generator emulation control strategy for voltage source converter (VSC) stations. IEEE Trans. Power Syst. 2015, 30, 3093–3101. [Google Scholar] [CrossRef]
- Anzalchi, A.; MalekPour, M.; Sarwat, A. A combinatorial approach for addressing intermittency and providing inertial response in a grid-connected photovoltaic system. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Arco, S.D.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids. IEEE Trans. Smart Grid 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Laudahn, S.; Seidel, J.; Engel, B.; Bülo, T.; Premm, D. Substitution of synchronous generator based instantaneous frequency control utilizing inverter-coupled DER. In Proceedings of the 2016 IEEE 7th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Vancouver, BC, Canada, 27–30 June 2016; pp. 1–6. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| R | 0.1 ohm | Pm | P/0.9 |
| L | 45 mH | Active power of constant load | 6 MW |
| Rg | 0.1 ohm | Reactive power of constant load | 4 MVAR |
| Lg | 0.1 mH | Active power of the sudden connection | 11 MW |
| Switching frequency | 5 kHz | Reactive power of the sudden connection | 10 MVAR |
| Main frequency | 50 Hz | Active power of the sudden disconnection | 10 MW |
| DC link voltage | 850 V | Reactive power of the sudden disconnection | 8 MVAR |
| kr | 10 | ωc = ω0/3 | 102 |
| Phase grid voltage | 220 V | Active power of the sudden disconnection for various resonant factors | 12 MW |
| J | 1 × 10−3 s | Reactive power of the sudden disconnection for various resonant factors | 11 MVAR |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehrasa, M.; Pouresmaeil, E.; Pournazarian, B.; Sepehr, A.; Marzband, M.; Catalão, J.P.S. Synchronous Resonant Control Technique to Address Power Grid Instability Problems Due to High Renewables Penetration. Energies 2018, 11, 2469. https://doi.org/10.3390/en11092469
Mehrasa M, Pouresmaeil E, Pournazarian B, Sepehr A, Marzband M, Catalão JPS. Synchronous Resonant Control Technique to Address Power Grid Instability Problems Due to High Renewables Penetration. Energies. 2018; 11(9):2469. https://doi.org/10.3390/en11092469
Chicago/Turabian StyleMehrasa, Majid, Edris Pouresmaeil, Bahram Pournazarian, Amir Sepehr, Mousa Marzband, and João P. S. Catalão. 2018. "Synchronous Resonant Control Technique to Address Power Grid Instability Problems Due to High Renewables Penetration" Energies 11, no. 9: 2469. https://doi.org/10.3390/en11092469