Analysis of Propagation Delay for Multi-Terminal High Voltage Direct Current Networks Interconnecting the Large-Scale Off-Shore Renewable Energy




Abstract
:1. Introduction
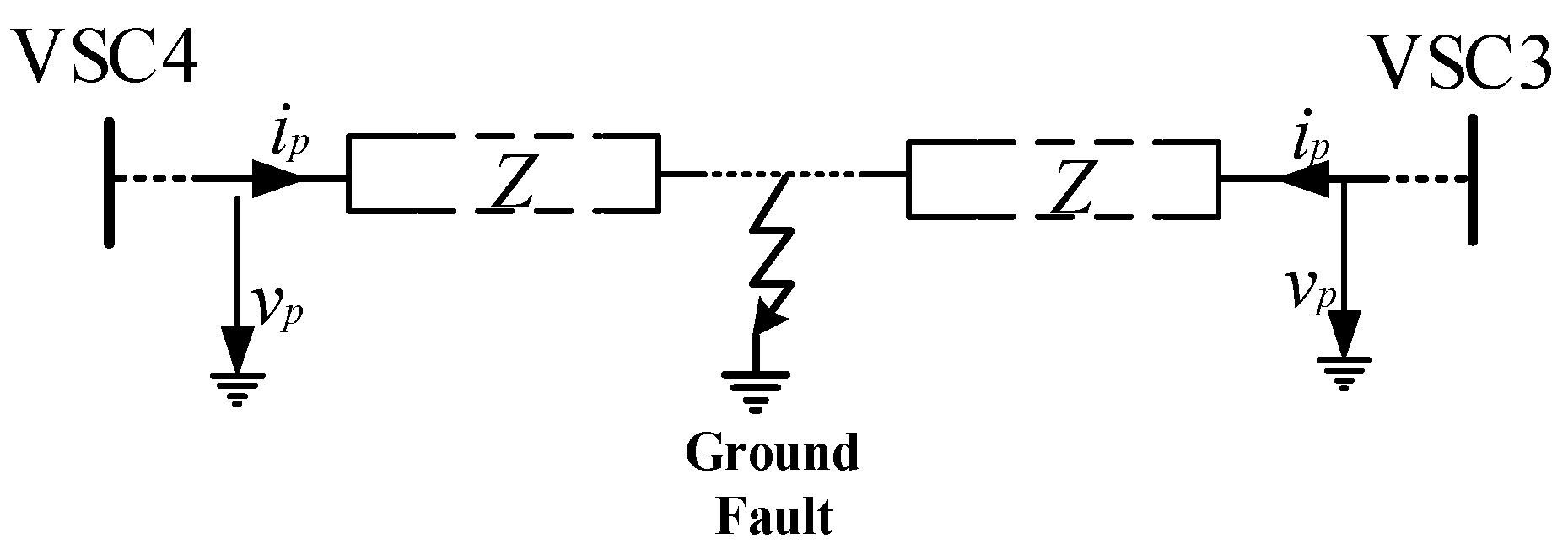
2. Reflection Coefficient
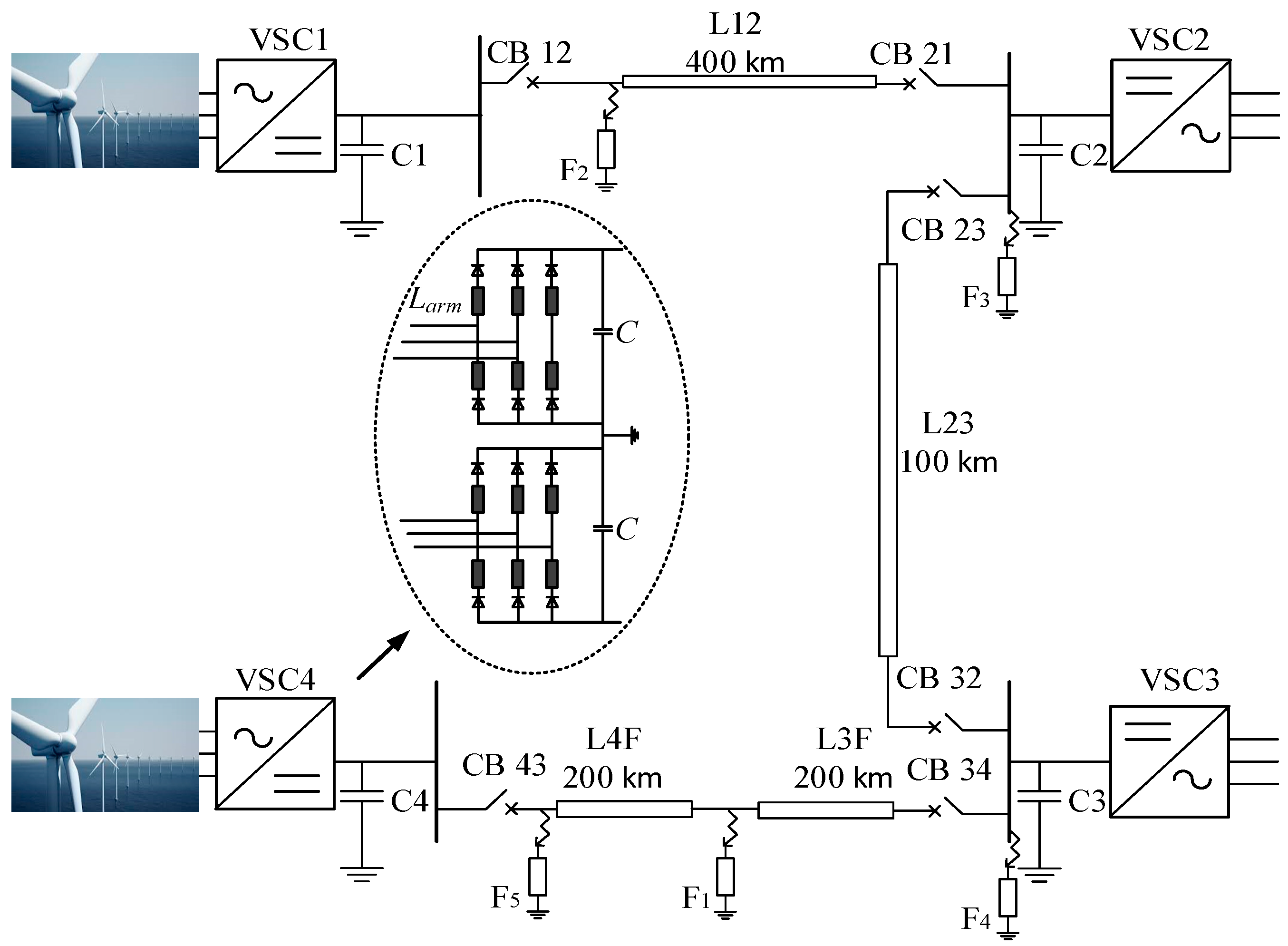
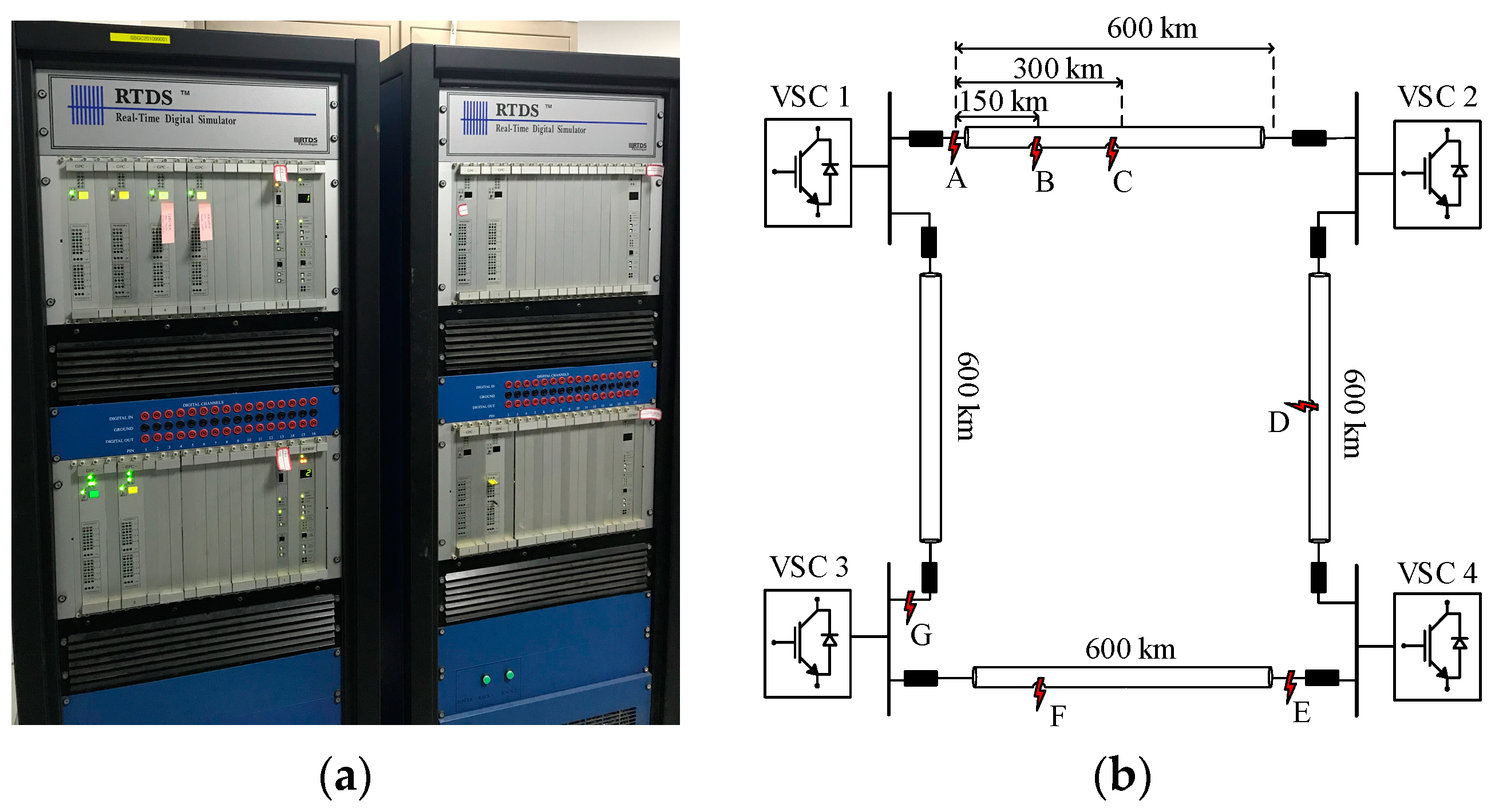
3. System Modeling
3.1. Cable Model
3.2. Converter and Network Model
4. Methodology
5. Proposed Model
6. Results and Evaluation
6.1. Propagation Time Delay Testing for Cable
6.2. Different Cases for Propagation Time Delay
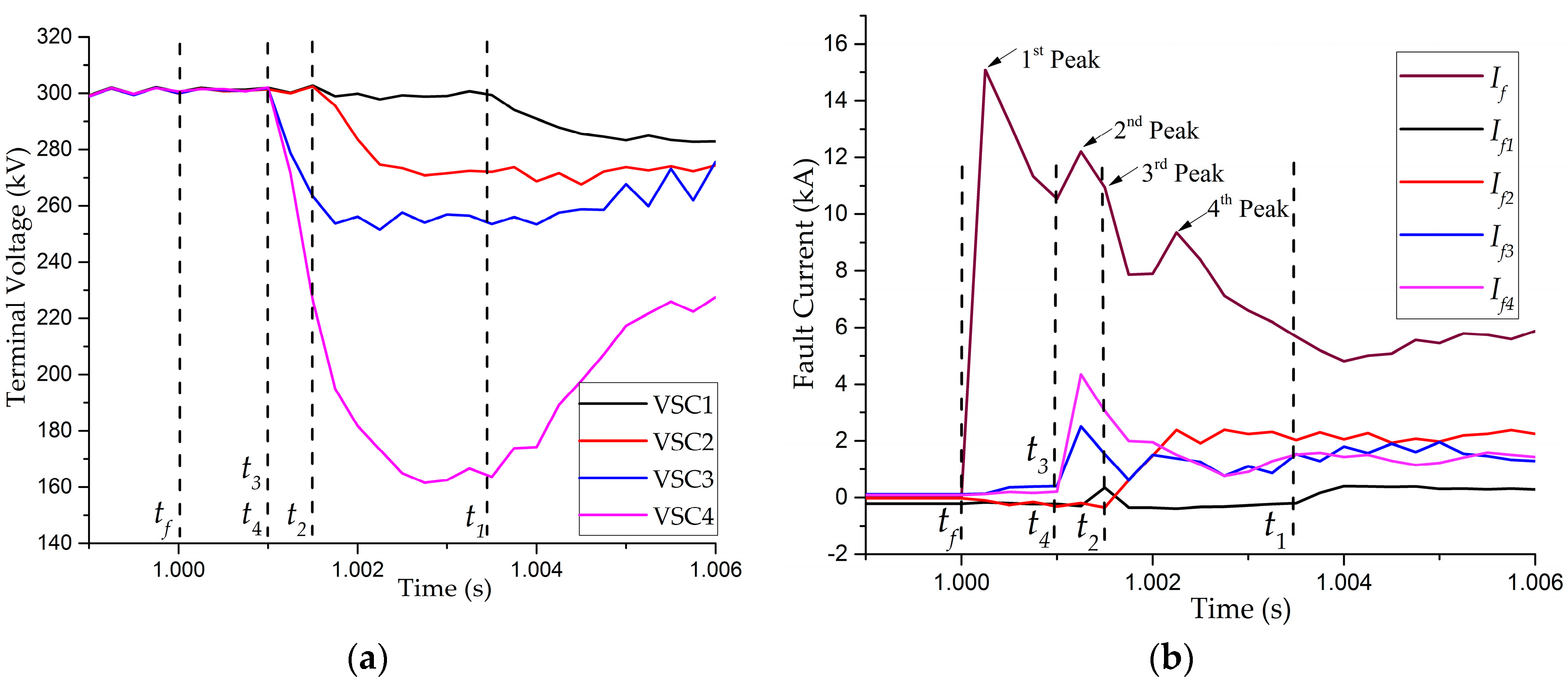
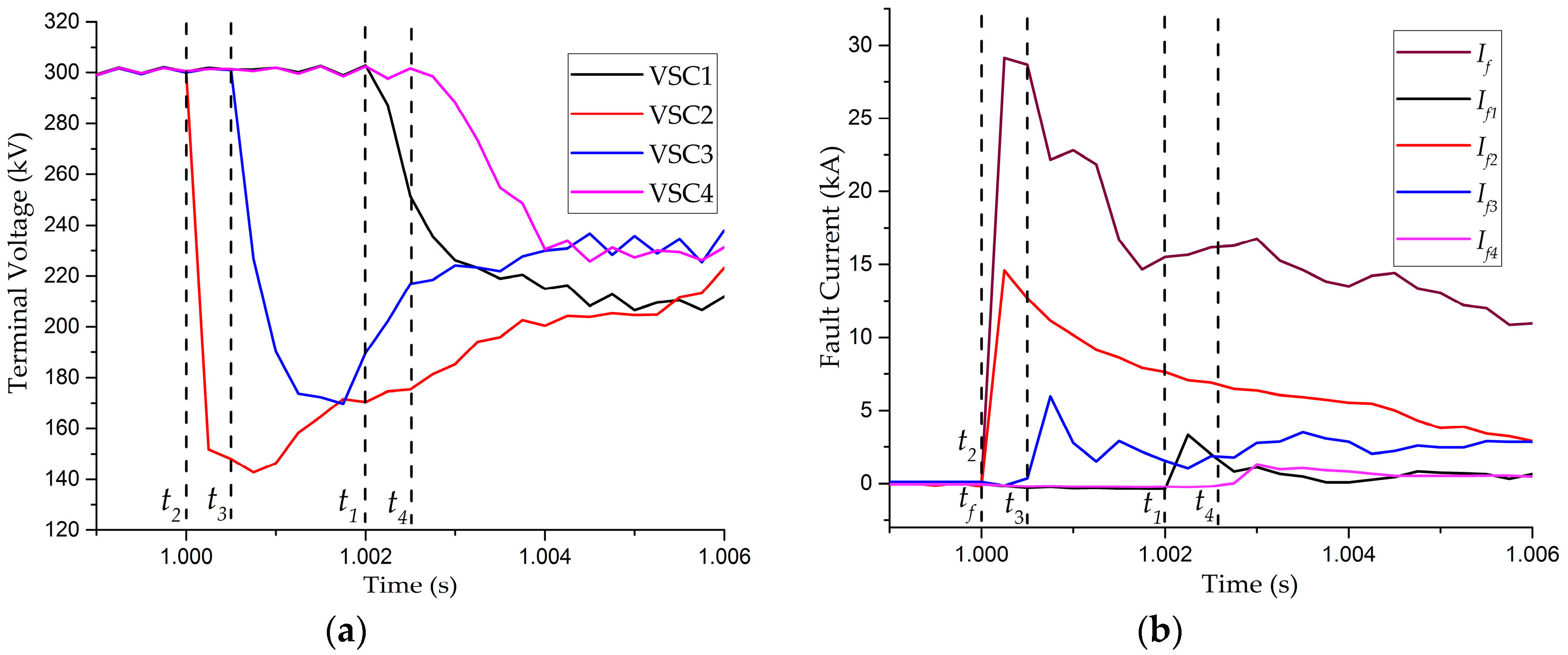
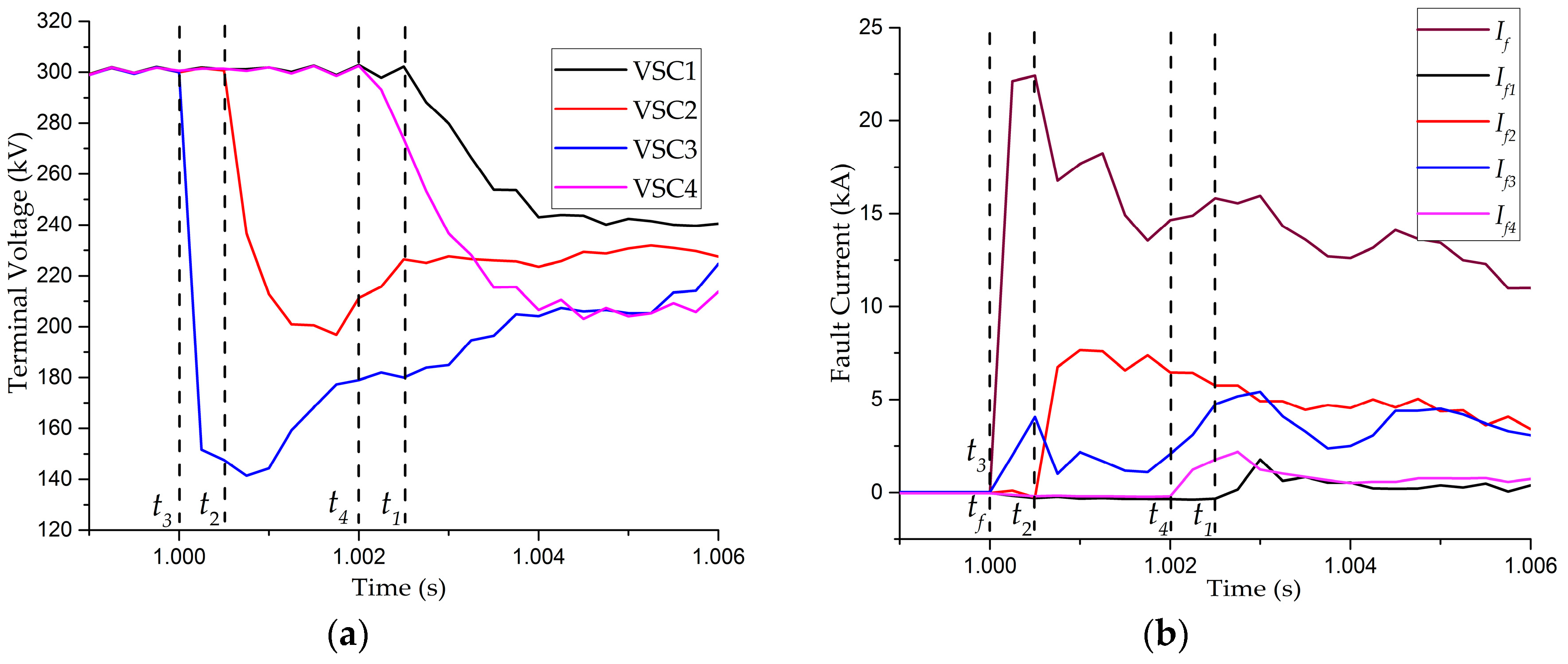
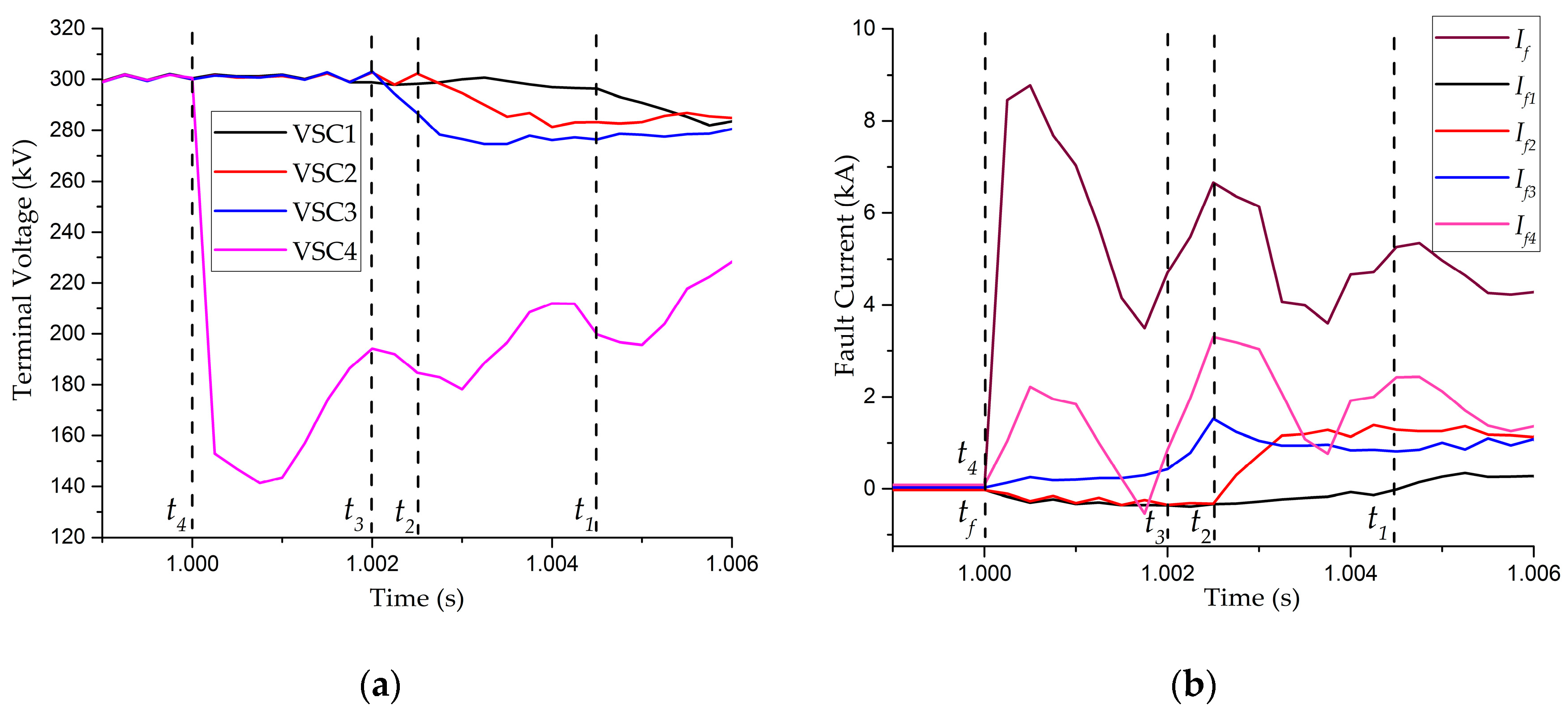
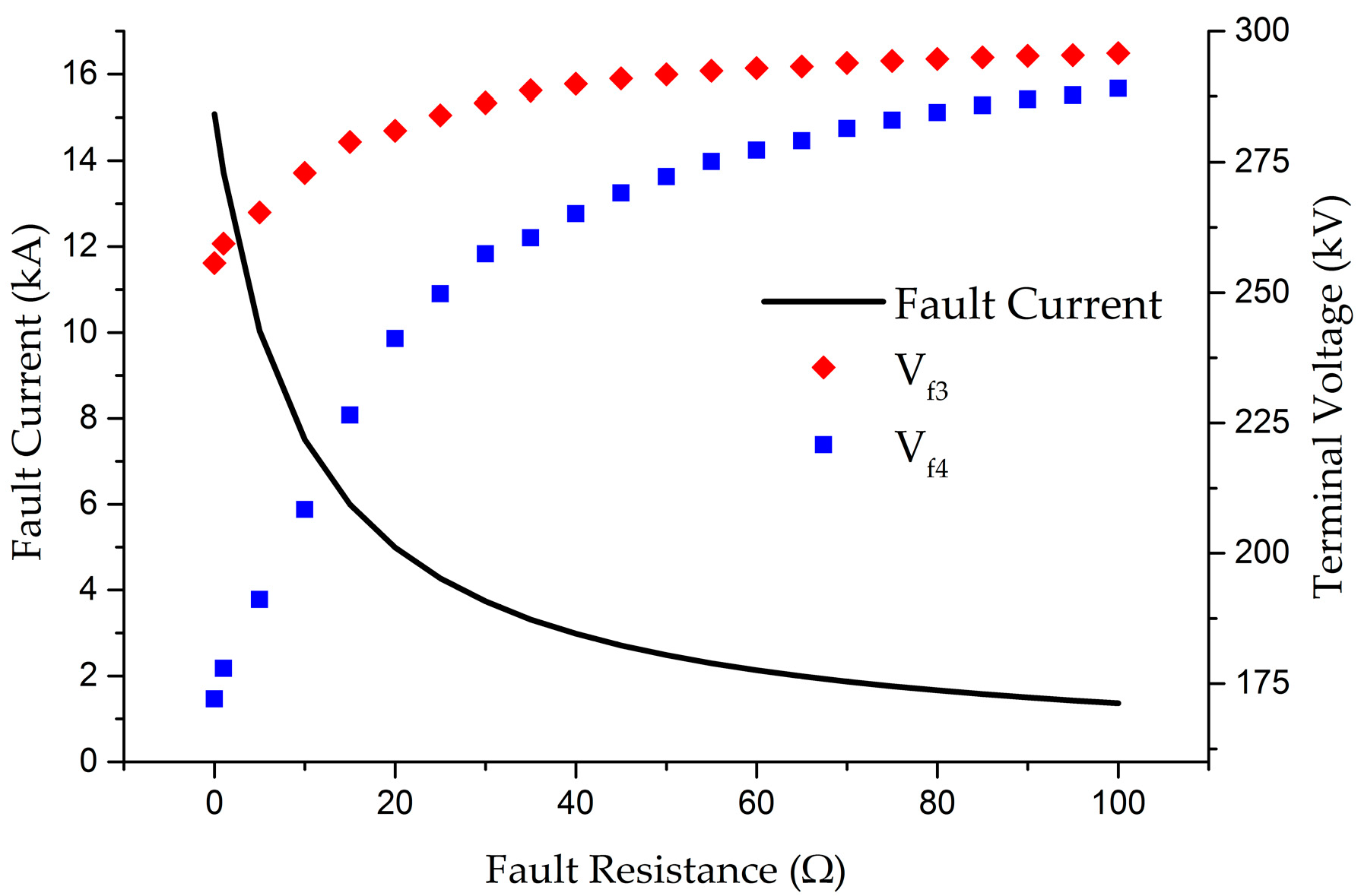
6.3. Terminal Voltage and Fault Current Dependence
6.4. Validation of Propagation Delay with Real-Time Digital Simulator (RTDS)
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Parameter |
| Dirac pulse | |
| Rc | Concentrated cable resistance, in Ω |
| u(t) | Step function |
| C | DC capacitance, in μF |
| Z | Surge impedence, in Ω |
| R | Resistance per unit length |
| L | Inductance per unit length |
| G | Conductance per unit length |
| Y | Admittance, in ℧ |
| K(s) | Propagation constant |
| Amplitude of the Forward Traveling Waves | |
| Amplitude of the Backward Traveling Waves | |
| K | Skin effect |
| Z0(s) | Characteristic impedance, in Ω |
| c | Propagation speed km/ms |
| Rf | Fault resistance, in Ω |
| Tp | Time for propagation, in seconds |
| R0 | Impedance of cable, in Ω |
| V0 | Initial voltage step |
| erfc | Complementary error function |
| N | Reflection index of the optical fiber |
| Tf | Time of fault, in seconds |
| T1–4 | Time delay for Terminals 1–4, in seconds |
| VSC1–4 | Voltage-source converter voltage 1–4, in kV |
| If1–4 | Fault current in Terminals 1–4, in kA |
| TVSC1–4 (CALC) | Calculated time delay for Terminals 1–4, in seconds |
| TVSC1–4 (MEAS) | Measured time delay for Terminals 1–4, in seconds |
References
- Yaramasu, V.; Wu, B.; Sen, P.C.; Kouro, S.; Narimani, M. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Zervos, A.; Kjaer, C. Pure Power: Wind Energy Targets for 2020 and 2030. Available online: http://www.ewea.org/ (accessed on 20 May 2018).
- De Decker, J.; Kreutzkamp, P. OffshoreGrid: Offshore Electricity Infrastructure in Europe. 2011. Available online: http://www.offshoregrid.eu/ (accessed on 8 June 2018).
- The North Seas Countries’ Offshore Grid Initiative. NSCOGI 2013/2014 Progress Report. Available online: http://www.benelux.int/files/9814/0922/7026/NSCOGI_2013_2014.pdf (accessed on 8 August 2017).
- Hertem, D.V.; Ghandhari, M. Multi-terminal VSC HVDC for the European super grid: Obstacles. Renew. Sustain. Energy Rev. 2010, 14, 3156–3163. [Google Scholar] [CrossRef]
- Negra, N.B.; Todorovic, J.; Ackermann, T. Loss evaluation of HVAC and HVDC transmission solutions for large offshore wind farms. Electr. Power Syst. Res. 2006, 76, 916–927. [Google Scholar] [CrossRef]
- Flourentzou, N.; Agelidis, V.; Demetriades, G. VSC-based HVDC power transmission systems: An overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Liu, C.C.; He, L.; Finney, S.; Adam, G.P.; Curis, J.B.; Despouys, O.; Prevost, T.; Moreira, C.; Phulpin, Y.; Silva, B. Preliminary Analysis of HVDC Networks for Off-Shore Wind Farms and Their Coordinated Protection; Technical Report for Status Report for European Commission; European Commission: Brussels, Belgium; Luxembourg, 2011. [Google Scholar]
- Hajian, M.; Zhang, L.; Jovcic, D. DC transmission grid with low-speed protection using mechanical DC circuit breakers. IEEE Trans. Power Deliv. 2015, 30, 1383–1391. [Google Scholar] [CrossRef]
- Sanusi, W.; Hosani, M.A.; Moursi, M.S.E. A novel DC fault ride-through scheme for MTDC networks connecting large-scale wind parks. IEEE Trans. Sustain. Energy 2017, 8, 1086–1095. [Google Scholar] [CrossRef]
- Tzelepis, D.; Dyśko, A.; Fusiek, G.; Nelson, J.; Niewczas, P.; Vozikis, D.; Orr, P.; Gordon, N.; Booth, C.D. Single-ended differential protection in MTDC networks using optical sensors. IEEE Trans. Power Deliv. 2017, 32, 1605–1615. [Google Scholar] [CrossRef]
- Nadeem, M.H.; Tai, N.; Zheng, X.; Gul, M. Multi-Terminal HVDC Fault Current Analysis During Line to Ground Fault. In Proceedings of the IEEE Innovative Smart Grid Technologies IGST Asia 2017, Auckland, New Zealand, 1–5 December 2017. [Google Scholar]
- Nadeem, M.H.; Zheng, X.; Tai, N.; Gul, M.; Baloch, M.H. Analysis of Fault Current Contribution and Impact of Key Parameters in MTDC Network. Interciencia J. 2017, 42, 257–268. [Google Scholar]
- Nadeem, M.H.; Zheng, X.; Tai, N.; Gul, M. Identification and Isolation of Faults in Multi-terminal High Voltage DC Networks with Hybrid Circuit Breakers. Energies 2018, 11, 1086. [Google Scholar] [CrossRef]
- Nadeem, M.H.; Zheng, X.; Tai, N.; Gul, M. Detection and Classification of Faults in MTDC Networks. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference 2018, Sabah, Malaysia, 7–10 October 2018. [Google Scholar]
- Abu-Elanien, A.E.B.; Abdel-Khalik, A.S.; Massoud, A.M.; Ahmed, S. A non-communication based protection algorithm for multi-terminal HVDC grids. Electr. Power Syst. Res. 2017, 144, 41–51. [Google Scholar] [CrossRef]
- Wang, J.; Liew, A.C.; Darveniza, M. Extension of dynamic model of impulse behavior of concentrated grounds at high currents. IEEE Trans. Power Deliv. 2015, 20, 2160–2165. [Google Scholar] [CrossRef]
- Miano, G.; Antonio, M. Transmission Lines and Lumped Circuits: Fundamentals and Applications; Academic Press: San Diego, CA, USA, 2001; Available online: https://www.elsevier.com/books/transmission-lines-and-lumped-circuits/miano/978-0-12-189710-9 (accessed on 25 March 2018).
- Bucher, M.K.; Franck, C.M. Contribution of fault current sources in multiterminal HVDC cable networks. IEEE Trans. Power Deliv. 2013, 28, 1796–1803. [Google Scholar] [CrossRef]
- Worzyk, T. Submarine Power Cables: Design, Installation, Repair, Environmental Aspects; Springer Science & Business Media: Berlin, Germany, 2009. [Google Scholar]
- Mura, F.; Christoph, M.; Doncker, R.W.D. Stability analysis of high-power dc grids. IEEE Trans. Ind. Appl. 2010, 46, 584–592. [Google Scholar] [CrossRef]
- Dodds, S. HVDC VSC (HVDC Light) Transmission—Operating Experiences; CIGRE: Paris, France, 2010. [Google Scholar]
- Magnusson, P. Transient wavefronts on lossy transmission lines—Effect of source resistance. IEEE Trans. Circuit Theory 1968, 15, 290–292. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions: With Formulas, Graphs, and Mathematical Tables; US Government Printing Office: Washington, DC, USA, 1964.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Material | Outer Radius (mm) | Resistivity (mΩ) | Relative Permittivity | Relative Permeability |
|---|---|---|---|---|---|
| Core | Copper | 40.0 | 1 | 1 | |
| Insulation 1 | XLPE | 59.5 | - | 2.3 | 1 |
| Sheath | Lead | 64.0 | 1 | 1 | |
| Insulation 2 | XLPE | 67.5 | - | 2.3 | 1 |
| Armor | Steel | 78.3 | 1 | 400 | |
| Insulation 3 | PP | 83.5 | - | 2.1 | 1 |
| Parameters | Values |
|---|---|
| Rated converter power | 1000 MW |
| Alternating current (AC) voltage (P–P, RMS) | 500 kV |
| Direct current voltage | ±300 kV |
| Reactance to resistance ratio of AC network | 10 |
| Transformer leakage reactance | 0.1 p.u. |
| Total resistance of converter diodes | 0.005 p.u. |
| Converter phase reactor | 0.05 p.u. |
| Fault Type | Fault Location | Distance (km) | Propagation Delay (ms) |
|---|---|---|---|
| F2 | F-T1 | 0 | 0 |
| F-T2 | 400 | 2 | |
| F-T3 | 500 | 2.5 | |
| F-T4 | 900 | 4.5 | |
| F3 | F-T1 | 400 | 2 |
| F-T2 | 0 | 0 | |
| F-T3 | 100 | 0.5 | |
| F-T4 | 500 | 2.5 | |
| F4 | F-T1 | 500 | 2.5 |
| F-T2 | 100 | 0.5 | |
| F-T3 | 0 | 0 | |
| F-T4 | 400 | 2 | |
| F5 | F-T1 | 900 | 4.5 |
| F-T2 | 500 | 2.5 | |
| F-T3 | 400 | 2 | |
| F-T4 | 0 | 0 |
| Fault Name | Tvsc1 (CALC) | Tvsc1 (MEAS) | Tvsc2 (CALC) | Tvsc2 (MEAS) | Tvsc3 (CALC) | Tvsc3 (MEAS) | Tvsc4 (CALC) | Tvsc4 (MEAS) |
|---|---|---|---|---|---|---|---|---|
| A | 1.00000 | 1.000000 | 1.00300 | 1.003001 | 1.00300 | 1.003001 | 1.0060 | 1.006012 |
| B | 1.00075 | 1.000754 | 1.00225 | 1.002248 | 1.00375 | 1.003748 | 1.00525 | 1.005261 |
| C | 1.00150 | 1.001496 | 1.00150 | 1.001503 | 1.00450 | 1.004500 | 1.00450 | 1.004495 |
| D | 1.00450 | 1.004504 | 1.00150 | 1.001497 | 1.00150 | 1.001501 | 1.00450 | 1.005453 |
| E | 1.00600 | 1.006007 | 1.00300 | 1.003000 | 1.00300 | 1.003007 | 1.00000 | 1.000000 |
| F | 1.00375 | 1.003745 | 1.00525 | 1.005298 | 1.00075 | 1.000749 | 1.00225 | 1.002248 |
| G | 1.00300 | 1.003002 | 1.00600 | 1.006003 | 1.00000 | 1.00000 | 1.00600 | 1.006012 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nadeem, M.H.; Zheng, X.; Tai, N.; Gul, M.; Tahir, S. Analysis of Propagation Delay for Multi-Terminal High Voltage Direct Current Networks Interconnecting the Large-Scale Off-Shore Renewable Energy. Energies 2018, 11, 2115. https://doi.org/10.3390/en11082115
Nadeem MH, Zheng X, Tai N, Gul M, Tahir S. Analysis of Propagation Delay for Multi-Terminal High Voltage Direct Current Networks Interconnecting the Large-Scale Off-Shore Renewable Energy. Energies. 2018; 11(8):2115. https://doi.org/10.3390/en11082115
Chicago/Turabian StyleNadeem, Muhammad Haroon, Xiaodong Zheng, Nengling Tai, Mehr Gul, and Sohaib Tahir. 2018. "Analysis of Propagation Delay for Multi-Terminal High Voltage Direct Current Networks Interconnecting the Large-Scale Off-Shore Renewable Energy" Energies 11, no. 8: 2115. https://doi.org/10.3390/en11082115