Adjustable Robust Optimization Algorithm for Residential Microgrid Multi-Dispatch Strategy with Consideration of Wind Power and Electric Vehicles




Abstract
1. Introduction
- (1)
- The proposed RO model handles the uncertain sets of both EV charging loads and available wind power by taking the worst scenario of uncertain variables into account. Comparison study is taken between SO and RO applied in the microgrid system dispatch problem. According to the numerical results, the RO dispatch strategy has outperformed on tolerating uncertainty, and its robustness is stronger than conventional SO dispatch strategies, while SO dispatch strategy has better economic performance than the RO dispatch strategy.
- (2)
- The proposed RO model in the paper is a semi-infinite programming model, which has difficulty in obtaining its analytical solution directly. The duality principle is explored to convert the original RO model to a robust counterpart with linear constraint, which can be easily solved with the Lagrange relaxation algorithm. In addition, in order to further reduce the computation complexity, a grouping approach based on charging horizon is employed to handle the situation when a large number of EVs access the microgrid system randomly at the same time.
- (3)
- The RO dispatch strategy sacrifices economic efficiency to guarantee the robustness of the microgrid system, which sometimes is over-protective or over-conservative. To avoid the over-conservatism of RO, an improved dispatch interval coefficient is introduced to quantify the relationship between economic efficiency and robustness of the RO model, which can provide a dispatch reference to decision makers for robust dispatch of microgrid in advance.
2. Residential Microgrid with Wind Power and EV
2.1. Uncertainty Sets of Wind Turbines
2.2. Uncertainty Sets of Electric Vehicles
2.3. Grouping Dispatch Approach
3. Problem Formulation
3.1. Objective Functions
3.1.1. Objective 1: Operating Cost Minimization
3.1.2. Objective 2: Pollutants Emission Minimization
3.1.3. The Total Cost Function of Dispatch Problem in Microgrid
3.2. Constraints
3.2.1. Conventional Economic Dispatch Constraints
3.2.2. Wind Power Constraints
3.2.3. Transmission Capacity Constraints
3.2.4. EV Charging Constraints
3.3. Robust Energy Management Model
4. Adjustable Robust Optimization Algorithm
4.1. Robust Equal Conversion
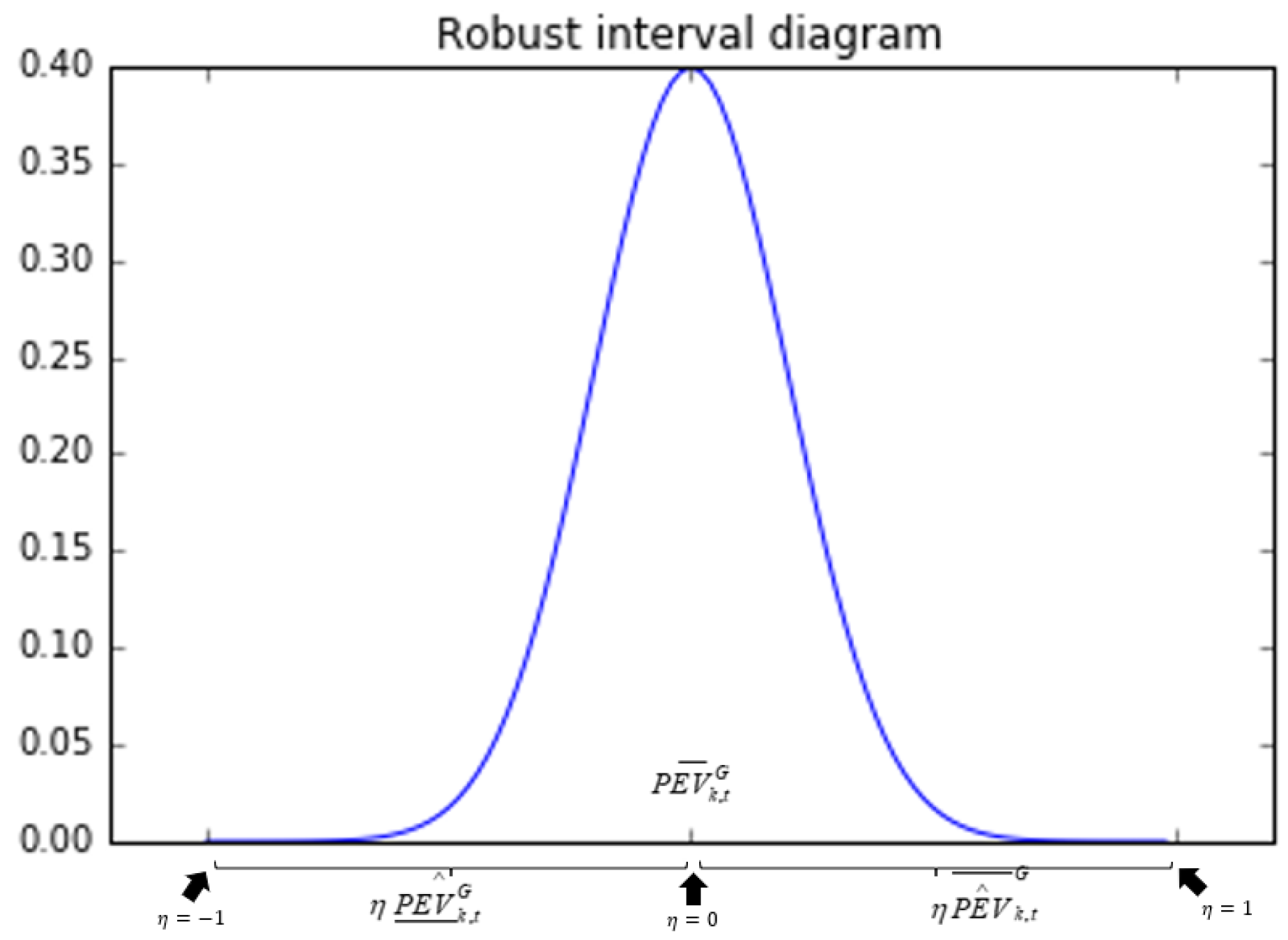
4.2. Adjustment Interval
5. Case Study
5.1. Problem Description
5.2. Parameter Specification
5.3. Simulation Scene
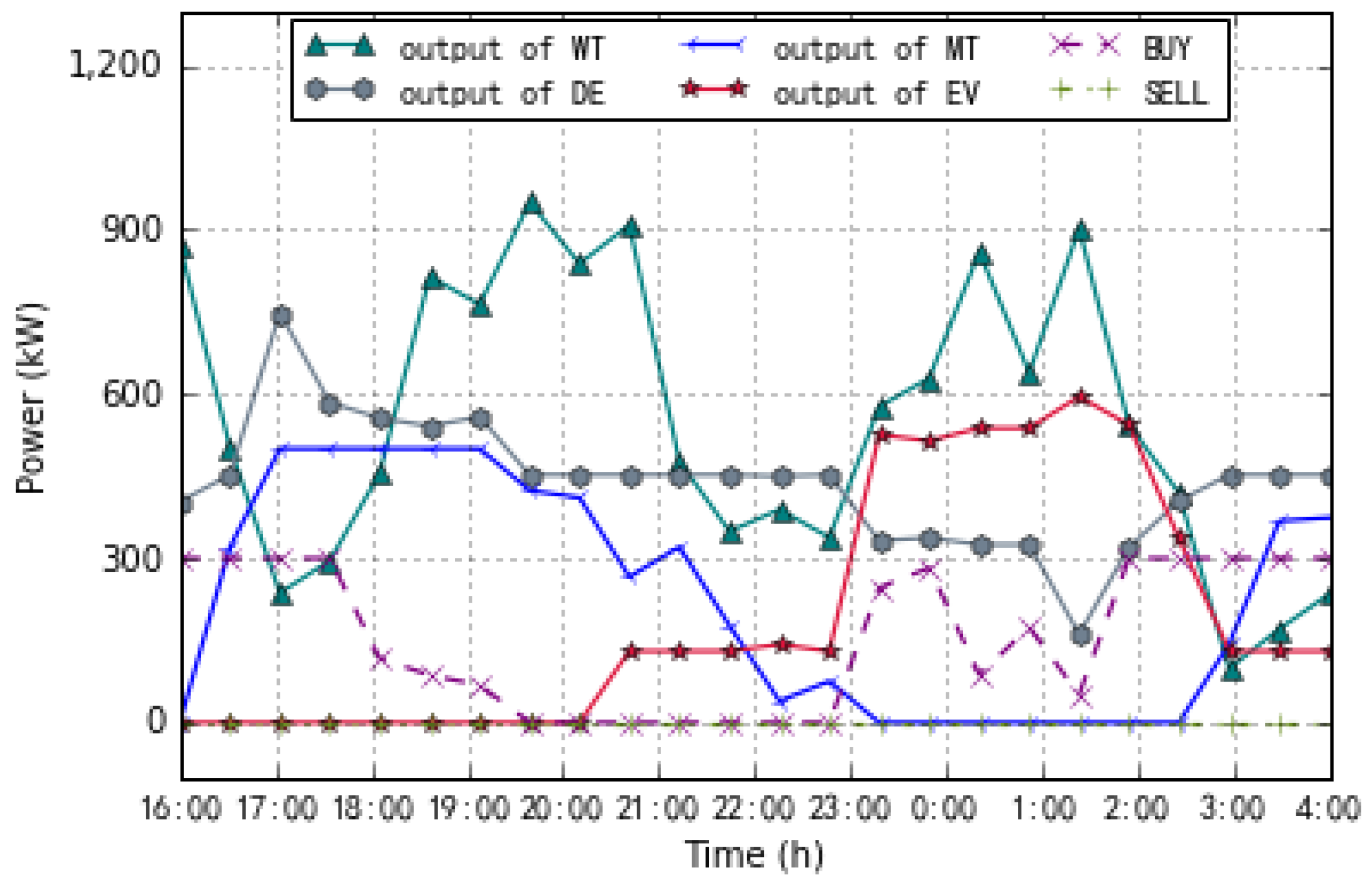
5.3.1. Case 1: Stochastic Optimization Result
5.3.2. Case 2: Robust Optimization Result
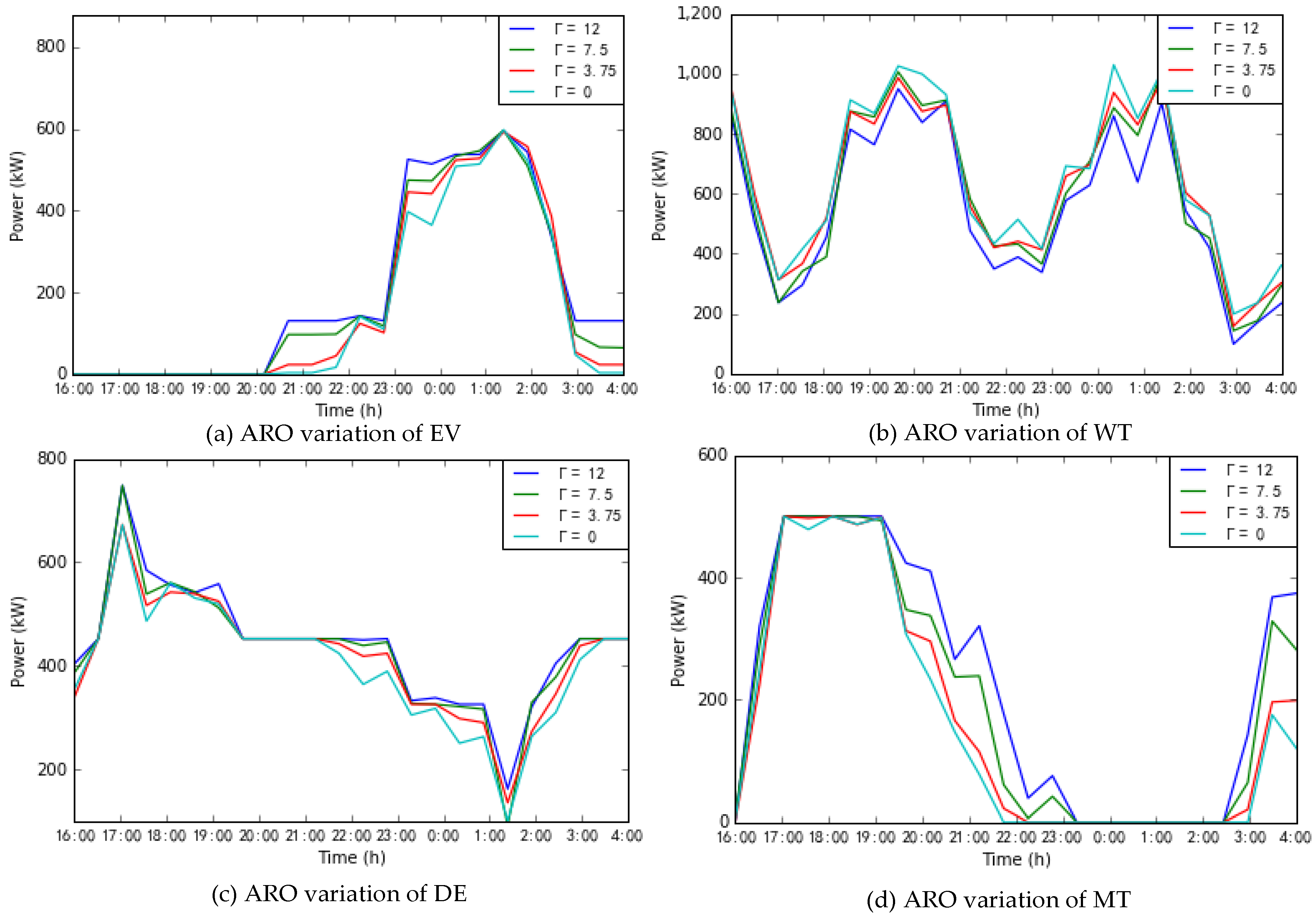
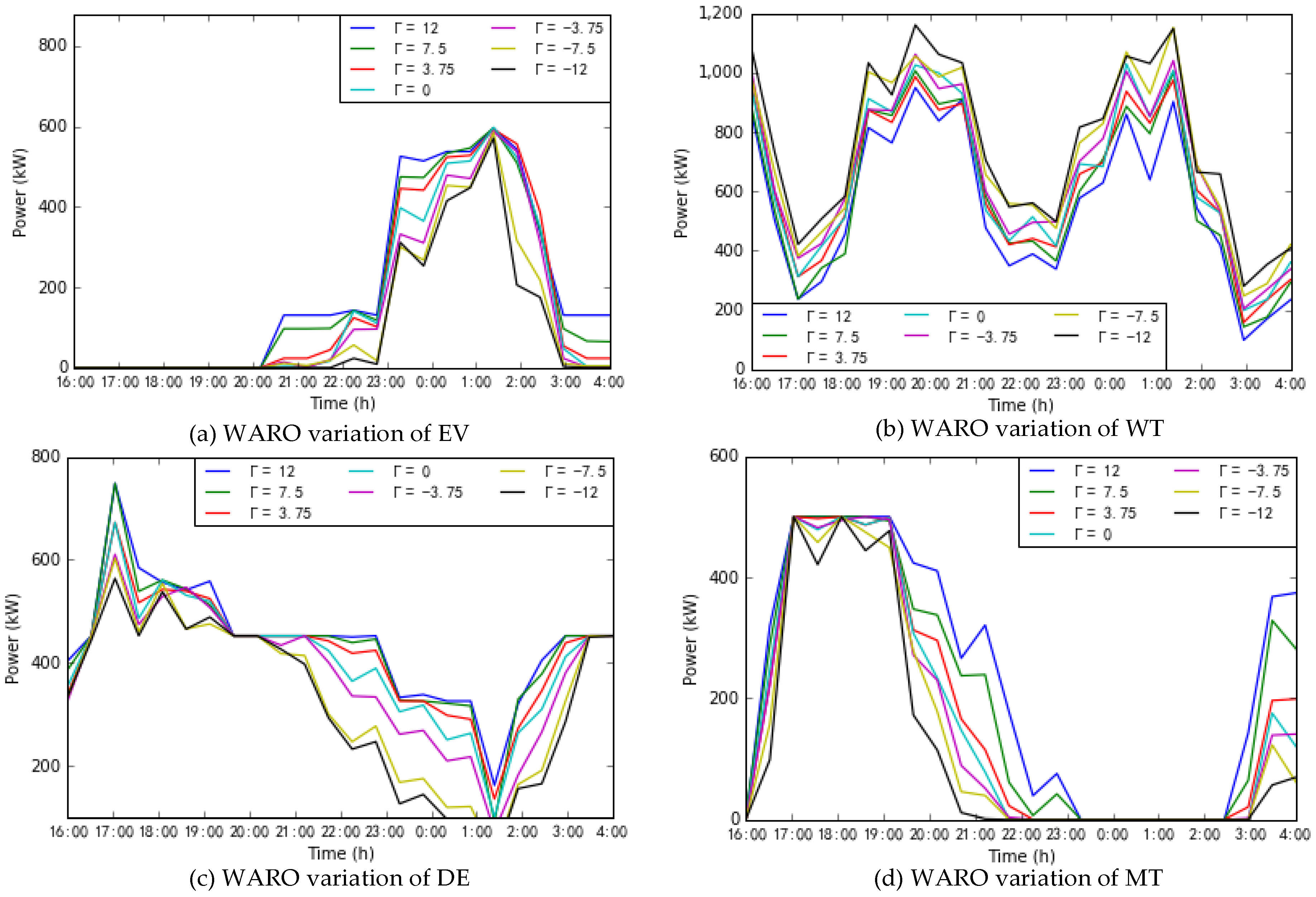
5.3.3. Case 3: Adjustable Robust Optimization Result
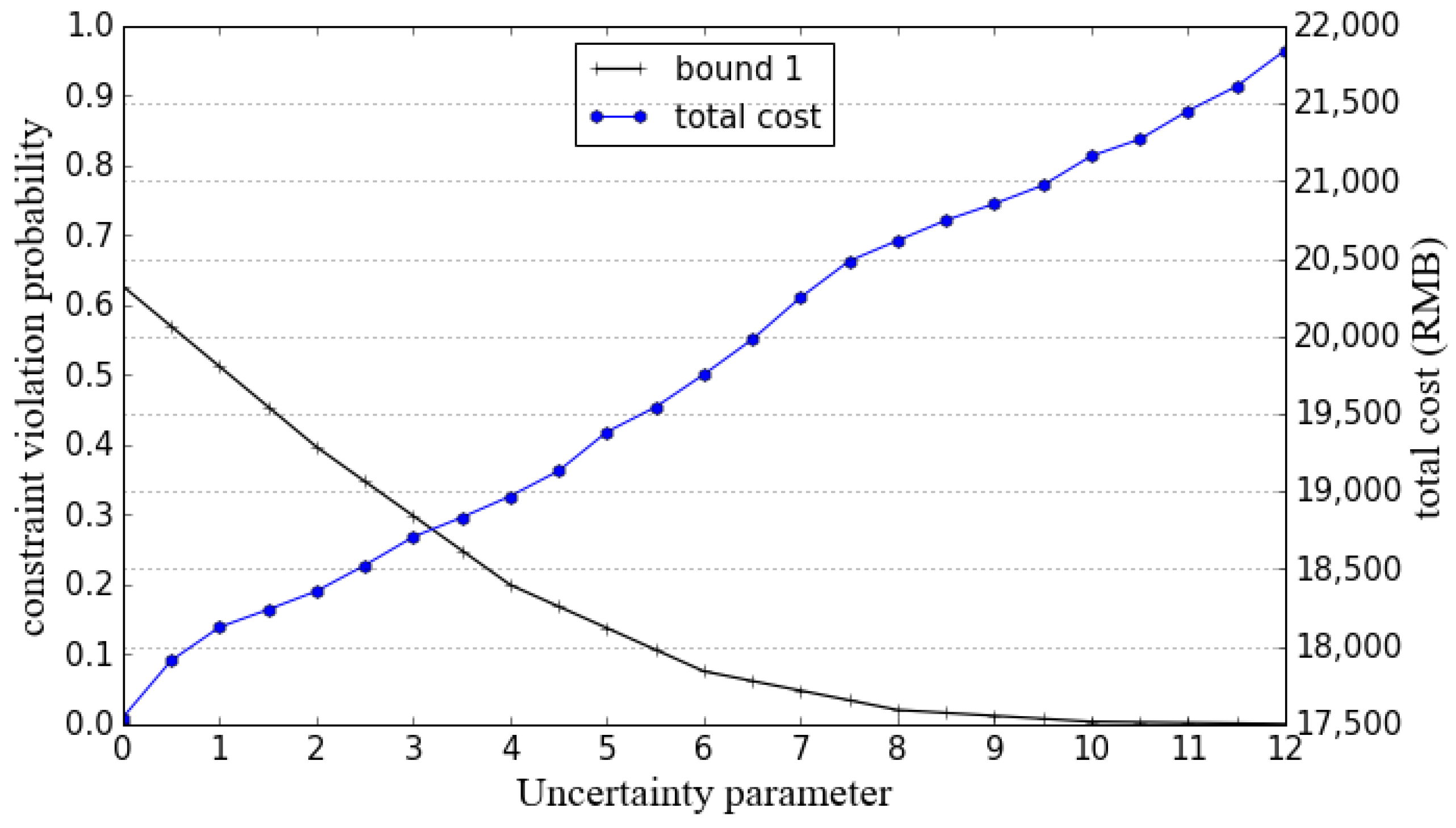
5.3.4. Case 4: Economic Analysis of Robust Invariant Set
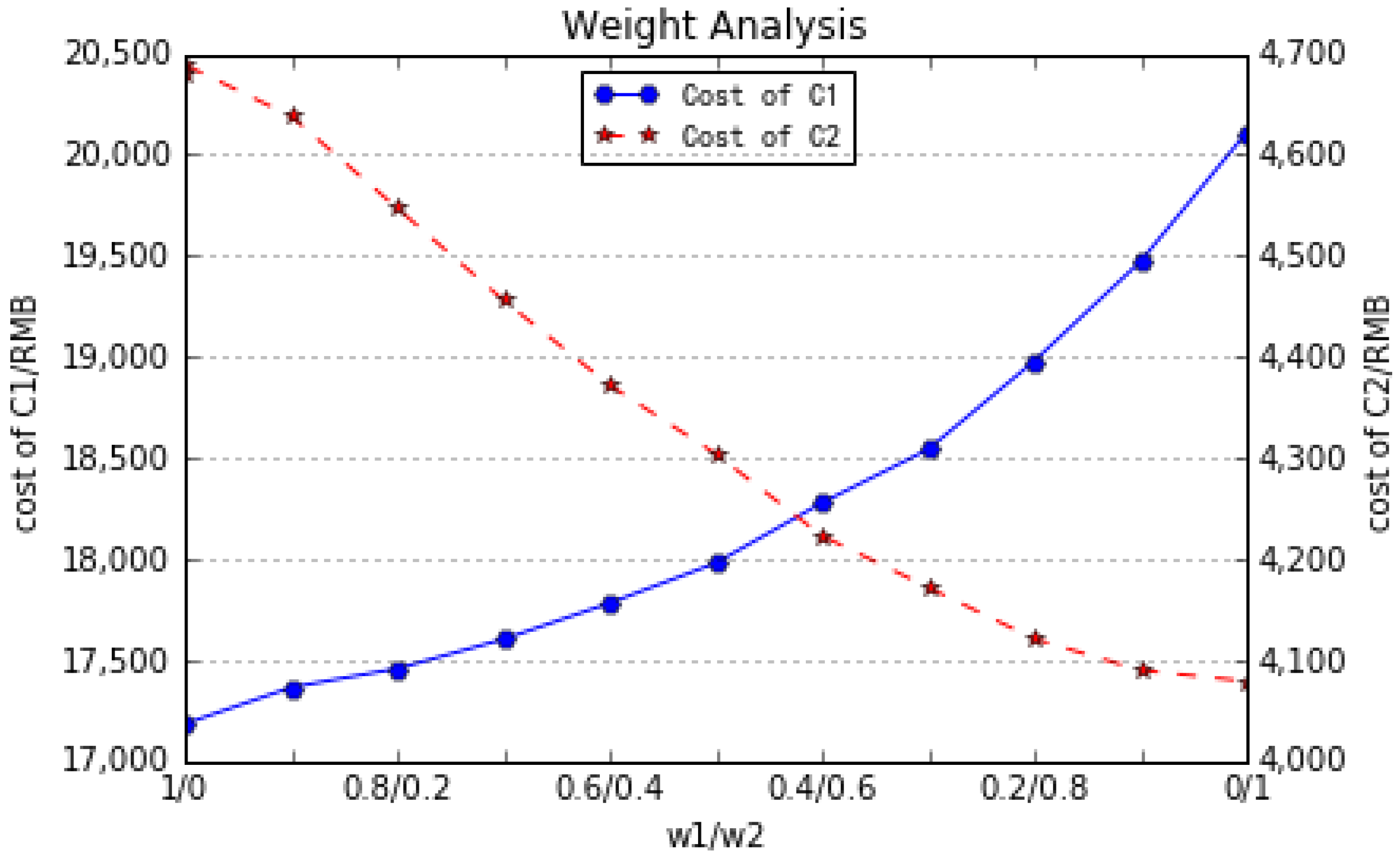
5.3.5. Case 5: Impact of Weighting Factors on the System
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| A. Nouns, Numbers, and Sets | ||
| MG | Microgrid | |
| CG | Conventional generation | |
| OM | Operation and maintenance | |
| SO | Stochastic optimization | |
| RO | Robust optimization | |
| ARO | Adjustable robust optimization | |
| WARO | The whole range of ARO | |
| DE | Diesel engine | |
| MT | Micro turbine | |
| WT | Wind turbine | |
| EV | Electric vehicle | |
| SOC | State of charge | |
| i | The number of distributed energy types, including DE, MT, and WT | |
| The Output of distributed energy sources, including DE, MT, and WT | ||
| g | Number of diesel engines | |
| l | Number of wind turbines | |
| k | Number of Electric vehicle dispatch groups obtained according to the grouping dispatch approach | |
| j | Number of Micro turbines | |
| The total predicted EVs charging power for k groups at time t | ||
| H | The total number of the pollutant emissions | |
| The lower regulation speed limit of i-the type DGs including DE and MT | ||
| The upper regulation speed limit of i-the type DGs including DE and MT | ||
| The minimum output power of i-th type DGs including DE and MT at time t | ||
| The maximum output power of i-th type DGs including DE and MT at time t | ||
| B. Uncertain parts | ||
| L | The number of uncertainties for wind turbines | |
| K | The number of uncertainties for electric vehicles | |
| V | The wind speed | |
| η | The distribution parameter of Rayleigh distribution | |
| α | Confidence level | |
| Vin, Vr, Vout | Cut-in, rated and cut-out wind speeds | |
| Wr | Rated wind power | |
| a, b | The wind turbine parameters | |
| PWT | Uncertain sets of wind turbines | |
| The predicted output of l-th wind turbine at time t | ||
| , | The mean and variance of | |
| , | The upper and lower bound of | |
| d, dr | The distance of individual EV travelling and the maximum travel distance of the EV | |
| μ, σ | The mean and standard deviation of logarithmic normal distribution function | |
| Set of n-th EV predicted charging start time | ||
| The upper and lower bound of | ||
| Set of n-th EVs predicted SOC | ||
| The upper and lower bound of | ||
| E | The battery capacity of an EV | |
| P | the charging power of the n-th EV | |
| Uncertain sets of electric vehicles | ||
| The charging power of all EVs at time t | ||
| , | The mean and variance | |
| , | The upper and lower bound of | |
| Adjustable coefficient, which is used to adjust the uncertainty set of each uncertain variable, the range of is 0 to 1 | ||
| The number of uncertainties at time t, which is not necessarily an integer | ||
| The integral part of uncertainties at time t | ||
| S | The collection of uncertain variables whose scheduling coefficient is integer | |
| s | The collection of decimal part of uncertain variables whose scheduling coefficient is decimal | |
| C. Variables | ||
| The output of g-th DE at time t | ||
| The output of j-th MT at time t | ||
| The output of l-th WT at time t | ||
| The transmission power between the main grid and microgrid | ||
| The microgrid purchasing electricity from the main power grid | ||
| The microgrid selling electricity to the main power grid | ||
| The charging power of k-th EV group at time t | ||
| The status of the k-th group EV at time t | ||
| The status of the k-th group EV at last time t | ||
| The energy demand of k-th group EV | ||
| The initial status of total EVs | ||
| The total EV charging demand | ||
| The pollutant discharge coefficients of the i-type DGs including DE, MT and WT | ||
| The pollutant discharge coefficients of the main power grid | ||
| The dual coefficients | ||
| D. Constants | ||
| A time period | ||
| The cost parameter of diesel engine | ||
| The battery degradation cost parameters | ||
| The coefficients for transmission between Main Grid to MG at time t | ||
| The price of battery cell capacity | ||
| The OM cost parameter | ||
| Current coefficient | ||
| The treatment cost of the h-th pollutant emission | ||
| Cell voltage | ||
| The minimum and maximum price of the transmission power when purchasing electricity from the main power grid | ||
| The minimum and maximum price of the transmission power when selling electricity from the main power grid | ||
| The maximum charging power of k-th group EVs at time t | ||
| The weight coefficient of multi-objective function | ||
| The charging efficiency of EVs | ||
| Operating reserve | ||
| The power load of residential area at time t | ||
| F. Function | ||
| The fuel cost of CGs, including diesel engine | ||
| The operation and maintenance cost | ||
| The transmission cost between microgrid and the main power grid | ||
| The degradation cost of EV | ||
| The working efficiency of MT | ||
| Operating cost Minimization including the fuel cost and the operation and maintenance cost | ||
| Pollutants emission Minimization including CO2, SO2, NOx | ||
| The total cost function of dispatch problem | ||
| The total power resulting from uncertainties including EVs and WTs | ||
| Constraints violation probability | ||
References
- Liu, D.; Wang, Y.; Shen, Y. Electric Vehicle Charging and Discharging Coordination on Distribution Network Using Multi-Objective Particle Swarm Optimization and Fuzzy Decision Making. Energies 2016, 9, 186. [Google Scholar] [CrossRef]
- Asaleye, D.A.; Breen, M.; Murphy, M.D. A decision support tool for building integrated renewable energy microgrids connected to a smart grid. Energies 2017, 10, 1765. [Google Scholar] [CrossRef]
- Adderly, S.A.; Manukian, D.; Sullivan, T.D.; Son, M. Electric vehicles and natural disaster policy implications. Energy Policy 2018, 112, 437–448. [Google Scholar] [CrossRef]
- Long, X.; Zhang, P.; Chen, F.; Yu, Z. Optimal operation for microgrid using generalized demand side resources. Autom. Electr. Power Syst. 2013, 37, 7–12. [Google Scholar]
- Rahman, I.; Vasant, P.M.; Singh, S.M.; Abdullah-AI-Wadud, M.; Adnan, N. Review of recent trends in optimization techniques for plug-in hybrid, and electric vehicle charging infrastructures. Renew. Sustain. Energy Rev. 2016, 58, 1039–1047. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, J.; Lin, Y.; Si, Y.; Huang, C. Present situation and future prospect of renewable energy in China. Renew. Sustain. Energy Rev. 2017, 76, 865–871. [Google Scholar] [CrossRef]
- An, K.; Song, K.B.; Hur, K. Incorporating Charging/Discharging Strategy of Electric Vehicles into Security-Constrained Optimal Power Flow to Support High Renewable Penetration. Energies 2017, 10, 729. [Google Scholar] [CrossRef]
- Xiao, Y.; Wang, X.; Wang, X.; Wu, Z.; Liu, W. The Coordinated Development Path of Renewable Energy and National Economy in China Considering Risks of Electricity Market and Energy Policy. IEEE Trans. Ind. Inform. 2017, 13, 2566–2575. [Google Scholar] [CrossRef]
- Qi, F.; Wen, F.; Liu, X.; Salam, M.A. A Residential Energy Hub Model with a Concentrating Solar Power Plant and Electric Vehicles. Energies 2017, 10, 1159. [Google Scholar] [CrossRef]
- Suganya, S.; Raja, S.C.; Srinivasan, D.; Venkatesh, P. Smart utilization of renewable energy sources in a microgrid system integrated with plug-in hybrid electric vehicles. Int. J. Energy Res. 2017. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, Y.; Zhuo, R.; Jia, H. Energy storage capacity optimization for autonomy microgrid considering CHP and EV scheduling. Appl. Energy 2017, 210, 1113–1125. [Google Scholar] [CrossRef]
- Vavilapalli, V.S.; Sanjeevikumar, P.; Ramesh, V.; Umashanker, S.; Mihet-Popa, L. Study and analysis of intelligent microgrid energy management solution with distributed energy sources. Energies 2017, 10, 1419. [Google Scholar]
- Zhang, K.; Li, J.; He, Z.; Yan, W. Microgrid energy dispatching for industrial zones with renewable generations and electric vehicles via stochastic optimization and learning. Phys. A Stat. Mech. Appl. 2018, 501, 359–369. [Google Scholar] [CrossRef]
- Aghaei, J.; Nezhad, A.E.; Rabiee, A.; Rahimi, E. Contribution of plug-in hybrid electric vehicles in power system uncertainty management. Renew. Sustain. Energy Rev. 2016, 59, 450–458. [Google Scholar] [CrossRef]
- Mena, R.; Hennebel, M.; Li, Y.F.; Ruiz, C.; Zio, E. A risk-based simulation and multi-objective optimization framework for the integration of distributed renewable generation and storage. Renew. Sustain. Energy Rev. 2014, 37, 778–793. [Google Scholar] [CrossRef]
- Rabiee, A.; Sadeghi, M.; Aghaeic, J.; Heidari, A. Optimal operation of microgrids through simultaneous scheduling of electrical vehicles and responsive loads considering wind and PV units uncertainties. Renew. Sustain. Energy Rev. 2016, 57, 721–739. [Google Scholar] [CrossRef]
- Cardoso, G.; Stadler, M.; Bozchalui, M.C.; Sharma, R.; Marnay, C.; Barbosa-Povoa, A. Optimal investment and scheduling of distributed energy resources with uncertainty in electric vehicle driving schedules. Energies 2014, 64, 17–30. [Google Scholar] [CrossRef]
- Tuballa, M.L.; Abundo, M.L. A review of the development of smart grid technologies. Renew. Sustain. Energy Rev. 2016, 59, 710–725. [Google Scholar] [CrossRef]
- Mwasilu, F.; Justo, J.J.; Kim, E.K.; Do, T.D.; Jung, J.W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Nosratabadi, S.M.; Hooshmand, R.A.; Gholipour, E. A comprehensive review on microgrid and virtual power plant concepts employed for distributed energy resources scheduling in power systems. Renew. Sustain. Energy Rev. 2017, 67, 341–363. [Google Scholar] [CrossRef]
- Elsied, M.; Oukaour, A.; Gualous, H.; Brutto, O. Optimal economic and environment operation of micro-grid power systems. Energy Convers. Manag. 2016, 122, 182–194. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Multi-objective scheduling of electric vehicles in smart distribution system. Energy Convers. Manag. 2014, 79, 43–53. [Google Scholar] [CrossRef]
- Gazijahani, F.S.; Salehi, J. Stochastic multi-objective framework for optimal dynamic planning of interconnected microgrids. IET Renew. Power Gener. 2017, 11, 1749–1759. [Google Scholar] [CrossRef]
- Tu, A.N.; Crow, M.L. Stochastic optimization of renewable-based microgrid operation incorporating battery operating cost. IEEE Trans. Power Syst. 2016, 31, 2289–2296. [Google Scholar]
- Reddy, K.S.; Panwar, L.K.; Kumar, R.; Panigrahi, B.K. Distributed resource scheduling in smart grid with electric vehicle deployment using fireworks algorithm. J. Mod. Power Syst. Clean Energy 2016, 4, 188–199. [Google Scholar] [CrossRef]
- Bertsimas, D.; Brown, D.B.; Caramanis, C. Theory and applications of robust optimization. SIAM Rev. 2010, 53, 464–501. [Google Scholar] [CrossRef]
- Tang, M.; Tong, X.J.; Wen, Q. Security economic dispatch of power system integrated with wind farms considering uncertainty of network parameters. Proc. Chin. Soc. Univ. Electr. Power Syst. Autom. 2012, 24, 27–34. [Google Scholar]
- Ben-Tal, A.; Goryashko, A.; Guslitzer, E.; Nemirovski, A. Adjustable robust solutions of uncertain linear programs. Math. Program. 2004, 99, 351–376. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. The price of robustness. Oper. Res. 2004, 52, 35–53. [Google Scholar] [CrossRef]
- Pirouzi, S.; Aghaei, J.; Vahidinasab, V.; Niknam, T.; Khodaei, A. Robust linear architecture for active/reactive power scheduling of EV integrated smart distribution networks. Electr. Power Syst. Res. 2018, 155, 8–20. [Google Scholar] [CrossRef]
- Zhou, Y.; Yau, D.; You, P.; Cheng, P. Optimal-cost scheduling of electrical vehicle charging under uncertainty. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Soares, J.; Vale, Z.; Borges, N.; Lezama, F.; Kagan, K. Multi-objective robust optimization to solve energy scheduling in buildings under uncertainty. In Proceedings of the International Conference on Intelligent System Application to Power Systems, San Antonio, TX, USA, 17–21 September 2017; pp. 1–6. [Google Scholar]
- Liu, K.; Gao, F. Scenario adjustable scheduling model with robust constraints for energy intensive corporate microgrid with wind power. Renew. Energy 2017, 113, 1–10. [Google Scholar] [CrossRef]
- Wei, W.; Liu, F.; Mei, S.; Hou, Y. Robust energy and reserve dispatch under variable renewable generation. IEEE Trans. Smart Grid 2014, 6, 369–380. [Google Scholar] [CrossRef]
- Shi, R.; Sun, C.; Zhou, Z.; Zhang, L.; Liang, Z. A robust economic dispatch of residential microgrid with wind power and electric vehicle integration. In Proceedings of the 2016 Chinese Control and Decision Conference, Yinchuan, China, 28–30 May 2016; pp. 3672–3676. [Google Scholar]
- Tian, L.; Shi, S.; Jia, Z. A statistical model for charging demand of electric vehicles. Power Syst. Technol. 2010, 34, 127–130. [Google Scholar]
- Shao, C.; Wang, X.; Wang, X.; Du, C. Layered and distributed charge load dispatch of considerable electric vehicles. IEEE Trans. Power Syst. 2015, 30, 1858–1867. [Google Scholar] [CrossRef]
- Adhikari, A. Multi-objective operation management of a renewable MG (micro-grid) with back-up micro-turbine/fuel cell/battery hybrid power source. Energies 2011, 36, 6490–6507. [Google Scholar]
- Forman, J.; Stein, J.; Fathy, H. Optimization of dynamic battery paramter characterization experiments via differential evolution. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 867–874. [Google Scholar]
- Lu, X.; Zhou, K.; Yang, S. Multi-objective optimal dispatch of microgrid containing electric vehicles. J. Clean. Prod. 2017, 165, 1572–1581. [Google Scholar] [CrossRef]
- Xiang, Y.; Liu, J.; Wei, Z.; Cao, Y.; Jiang, D.; Ai, F. Robust model of microgrid energy optimization with uncertain renewable energy sources. Proc. Chin. Soc. Electr. Eng. (Proc. CSEE) 2014, 34, 3063–3072. [Google Scholar]
- Chen, D.; Zhu, G. An investigation on optimal load distribution of microgrids. Autom. Electr. Power Syst. 2010, 34, 45–49. [Google Scholar]
- Ma, Z.; Zou, S.; Ran, L.; Shi, X.; Hiskens, I.A. Efficient decentralized coordination of large-scale plug-in electric vehicle charging. Automatica 2016, 69, 35–47. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Maximum Value |
|---|---|
| Diesel engine (kW) | 1500 |
| Micro turbine (kW) | 250 |
| Wind turbine (kW) | 500 |
| Battery capacity (kW) | 60 |
| SOC lower/upper limits (%) | 10/100 |
| Charging power limit (kWh) | 6 |
| (kW) | 300 |
| (kW) | 150 |
| Type | DE | MT | WT |
|---|---|---|---|
| Kom (¥/kWh) * | 0.04 | 0.08 | 0.00294 |
| Type | Treatment Cost (¥/kg) | Pollutant Emission Coefficient (g/kW) | |||
|---|---|---|---|---|---|
| DE | MT | WT | Main Grid | ||
| CO2 | 0.21 | 680 | 724 | 0 | 889 |
| SO2 | 6 | 0.306 | 0.0036 | 0 | 1.8 |
| NOx | 8 | 10.09 | 0.2 | 0 | 1.6 |
| Type | DE | MT | WT | EV | C1 | C2 | CVP | ||
|---|---|---|---|---|---|---|---|---|---|
| Γ = 12 | 10,878.0 | 5262.7 | 12,625.5 | 4190.8 | 0 | 4706.0 | 17,342.2 | 4501.6 | 0.02% |
| Γ = 11 | 10,835.9 | 5219.5 | 12,764.2 | 4116.9 | 0 | 4685.5 | 16,987.5 | 4446.8 | 0.18% |
| Γ = 10 | 10,772.7 | 5094.9 | 12,971.1 | 4025.5 | 0 | 4613.2 | 16,749.7 | 4413.1 | 0.34% |
| Γ = 8.75 | 10,613.8 | 4623.9 | 13,855.6 | 3729.7 | 0 | 4572.0 | 16,097.9 | 4286.2 | 1.39% |
| Γ = 7.5 | 10,551.1 | 4525.5 | 14,192.0 | 3436.4 | 0 | 4454.0 | 15,784.0 | 4162.9 | 3.41% |
| Γ = 6.25 | 10,414.0 | 4317.1 | 14,480.7 | 3250.5 | 0 | 4211.3 | 15,462.8 | 4150.1 | 6.87% |
| Γ = 5 | 10,370.3 | 4233.1 | 14,439.5 | 3210.5 | 0 | 4002.4 | 14,975.3 | 4084.5 | 13.75% |
| Γ = 3.75 | 10,311.3 | 4152.7 | 14,657.5 | 3111.2 | 0 | 3981.7 | 15,124.4 | 4071.1 | 22.41% |
| Γ = 2.5 | 10,039.8 | 3982.6 | 15,220.1 | 2917.7 | 0 | 3909.2 | 14,449.6 | 3938.9 | 37.76% |
| Γ = 0 | 9763.0 | 3954.1 | 15,313.4 | 2798.2 | −25.7 | 3552.0 | 14,135.4 | 3843.1 | 62.73% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, R.; Li, S.; Sun, C.; Lee, K.Y. Adjustable Robust Optimization Algorithm for Residential Microgrid Multi-Dispatch Strategy with Consideration of Wind Power and Electric Vehicles. Energies 2018, 11, 2050. https://doi.org/10.3390/en11082050
Shi R, Li S, Sun C, Lee KY. Adjustable Robust Optimization Algorithm for Residential Microgrid Multi-Dispatch Strategy with Consideration of Wind Power and Electric Vehicles. Energies. 2018; 11(8):2050. https://doi.org/10.3390/en11082050
Chicago/Turabian StyleShi, Ruifeng, Shaopeng Li, Changhao Sun, and Kwang Y. Lee. 2018. "Adjustable Robust Optimization Algorithm for Residential Microgrid Multi-Dispatch Strategy with Consideration of Wind Power and Electric Vehicles" Energies 11, no. 8: 2050. https://doi.org/10.3390/en11082050
APA StyleShi, R., Li, S., Sun, C., & Lee, K. Y. (2018). Adjustable Robust Optimization Algorithm for Residential Microgrid Multi-Dispatch Strategy with Consideration of Wind Power and Electric Vehicles. Energies, 11(8), 2050. https://doi.org/10.3390/en11082050