Jerk Analysis of a Power-Split Hybrid Electric Vehicle Based on a Data-Driven Vehicle Dynamics Model

Abstract
:1. Introduction
2. System Dynamics Analysis
2.1. System Description
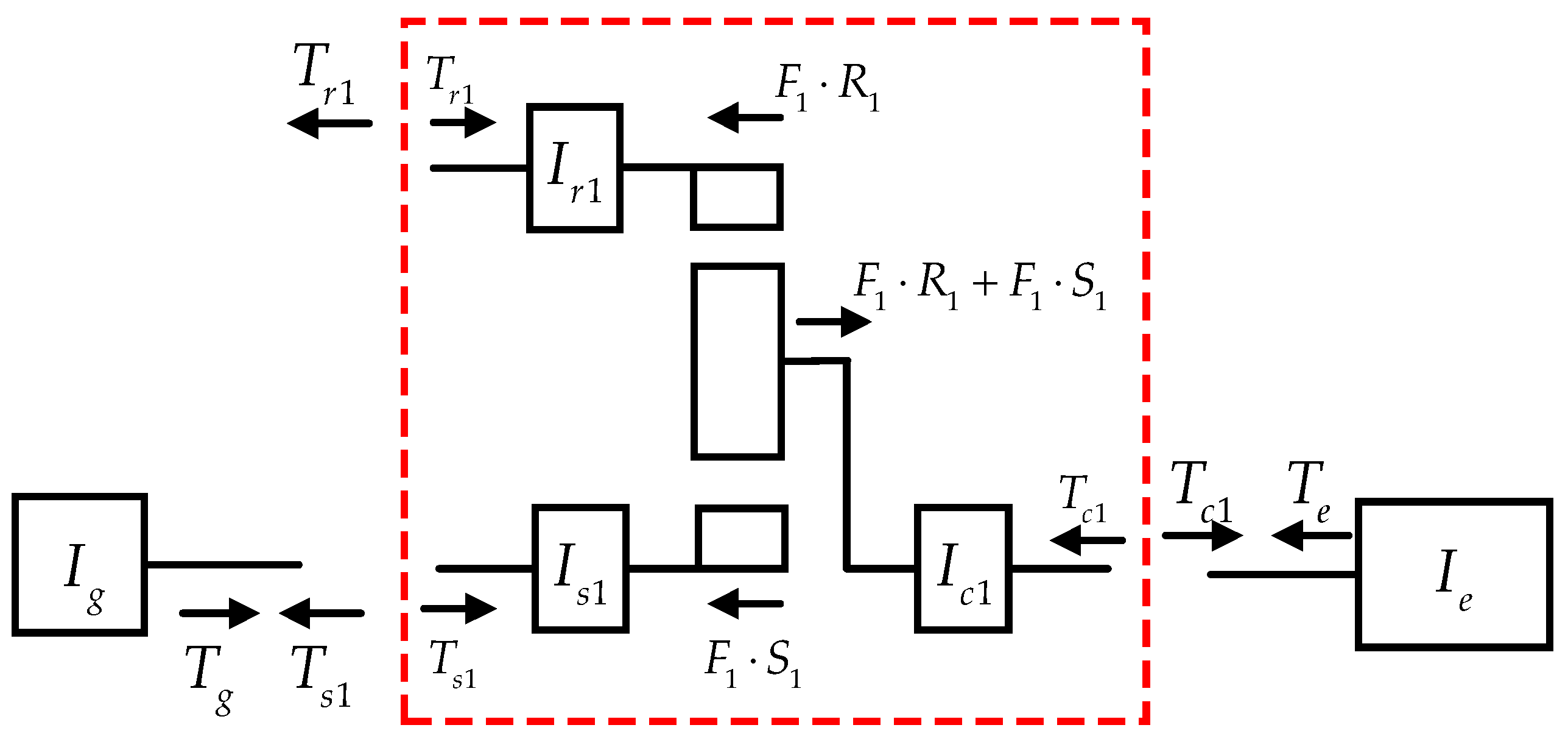
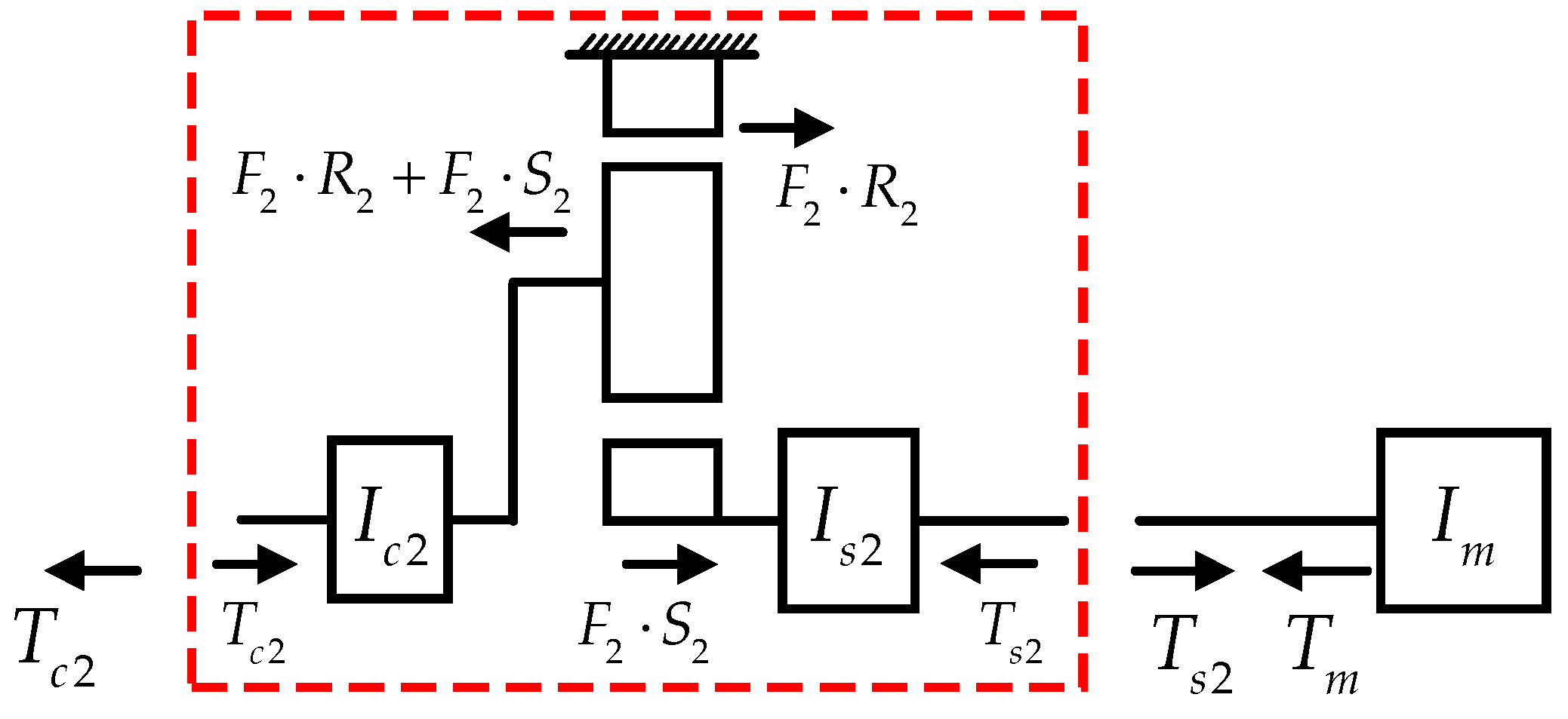
2.2. Dynamics Analysis
2.3. Jerk Analysis
3. Full-time Artificial Neural Network Engine Dynamic Model
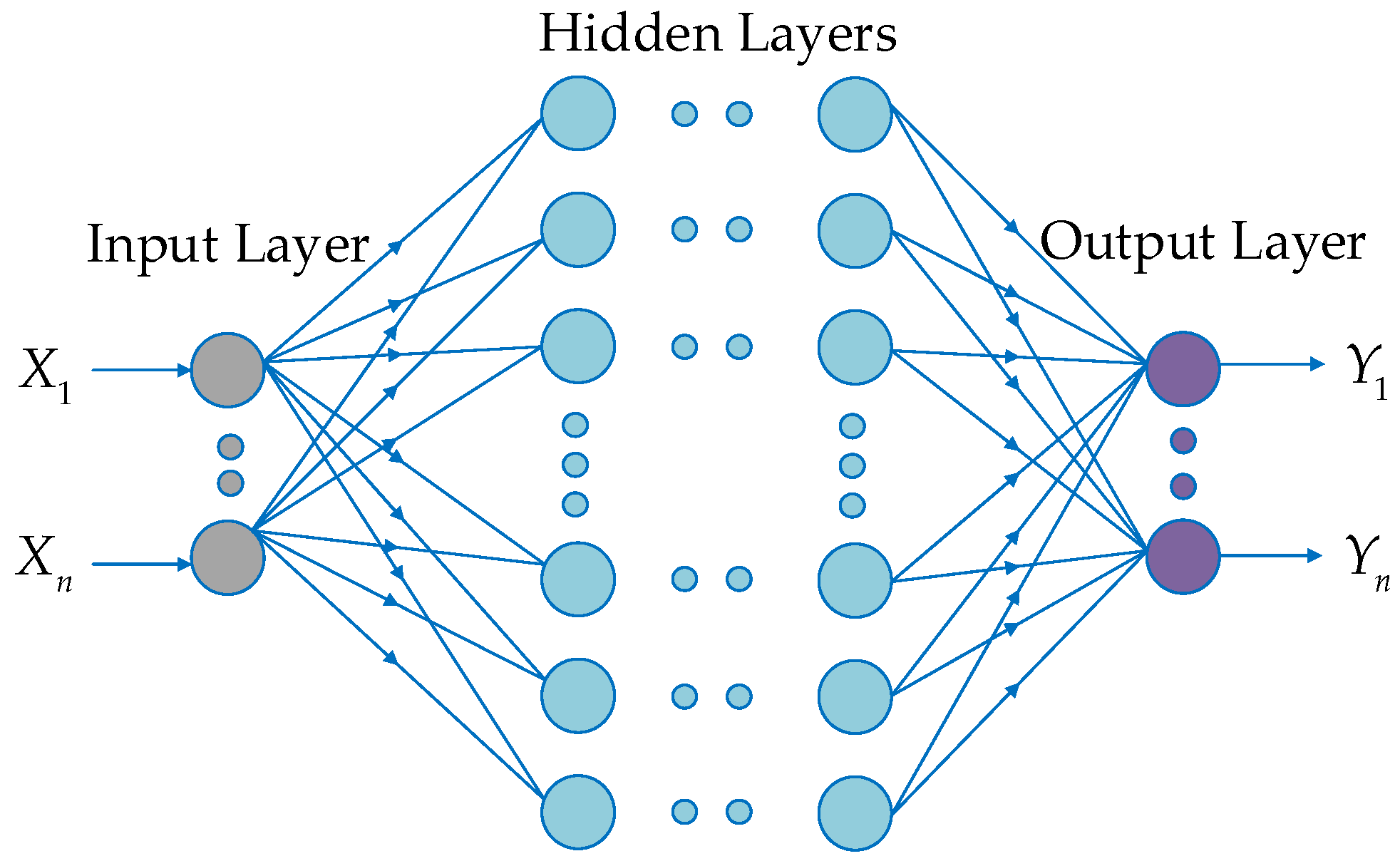
3.1. Artificial Neural Network Introduction
3.2. Engine Dynamic Model Establishment
3.2.1. Training Sample Data Selection
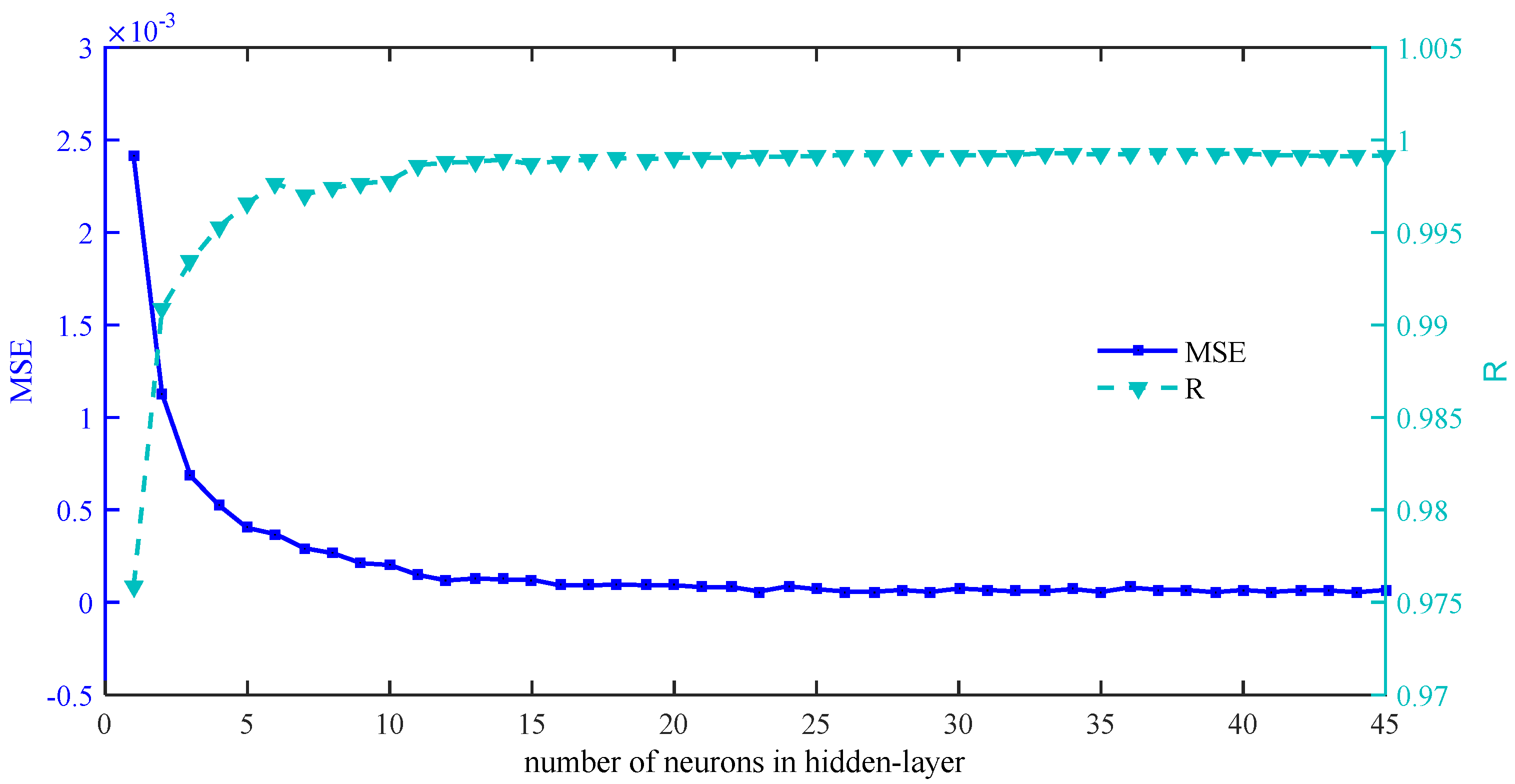
3.2.2. Artificial Neural Network Structure
3.2.3. Artificial Neural Network Generalization Capability Verification
4. Integration and Verification of Data-driven Vehicle Dynamics Model
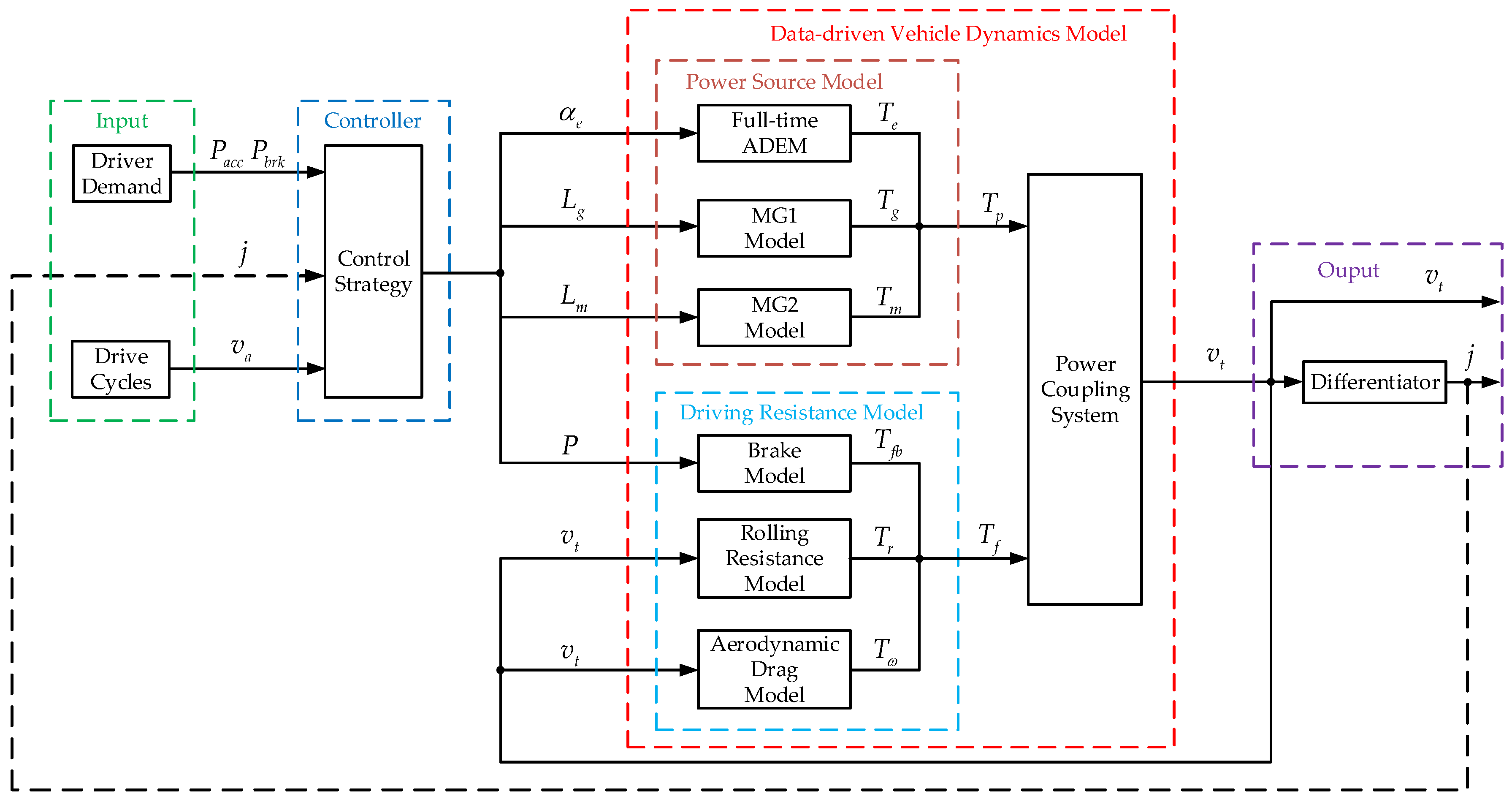
4.1. Integration of Data-Driven Vehicle Dynamics Model
4.1.1. Dual Motor Models
4.1.2. Vehicle Driving Resistance Model
4.1.3. Vehicle Model Integration
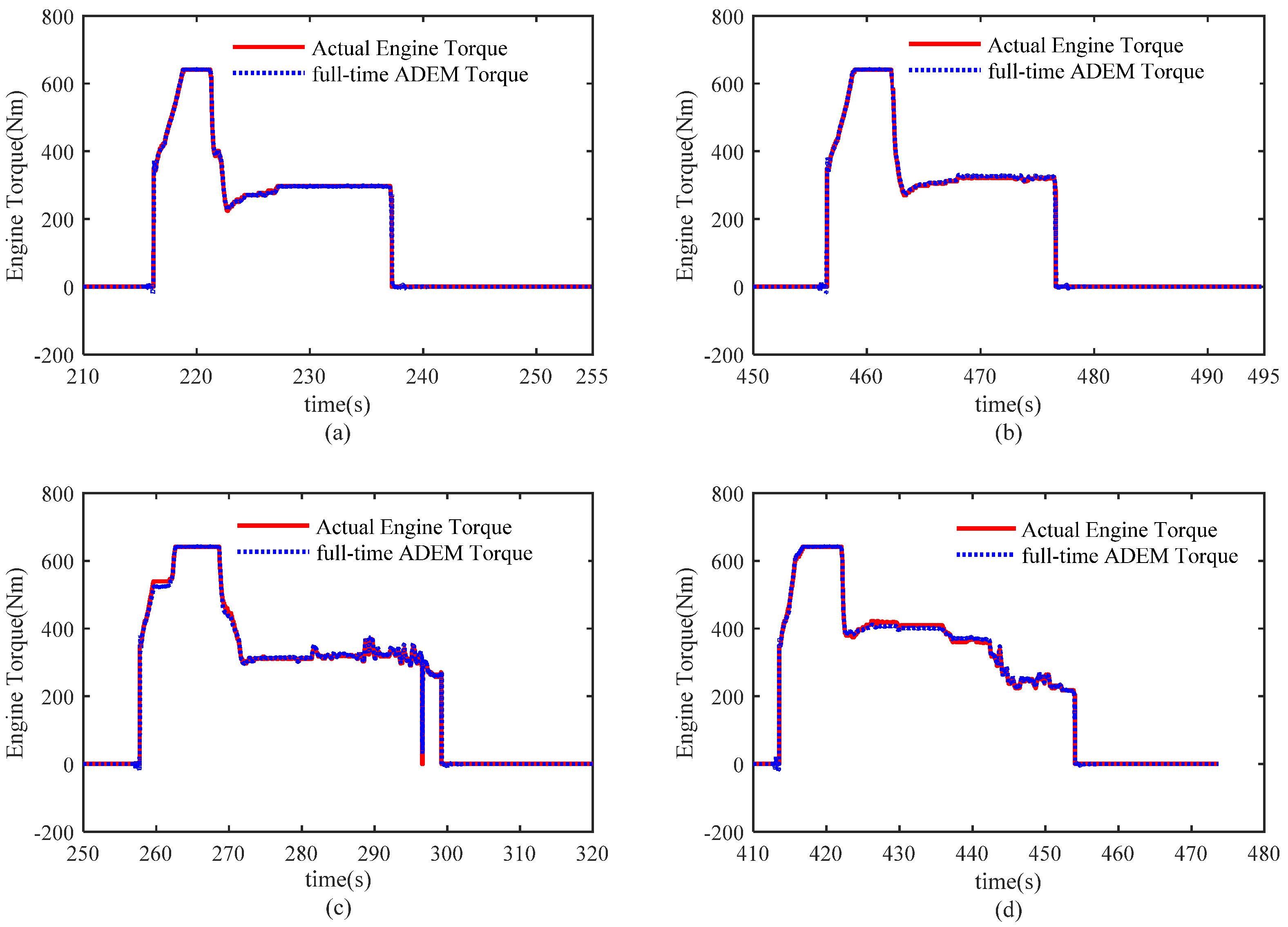
4.2. Model Accuracy Verification
5. Vehicle Jerk Analysis and Improvement
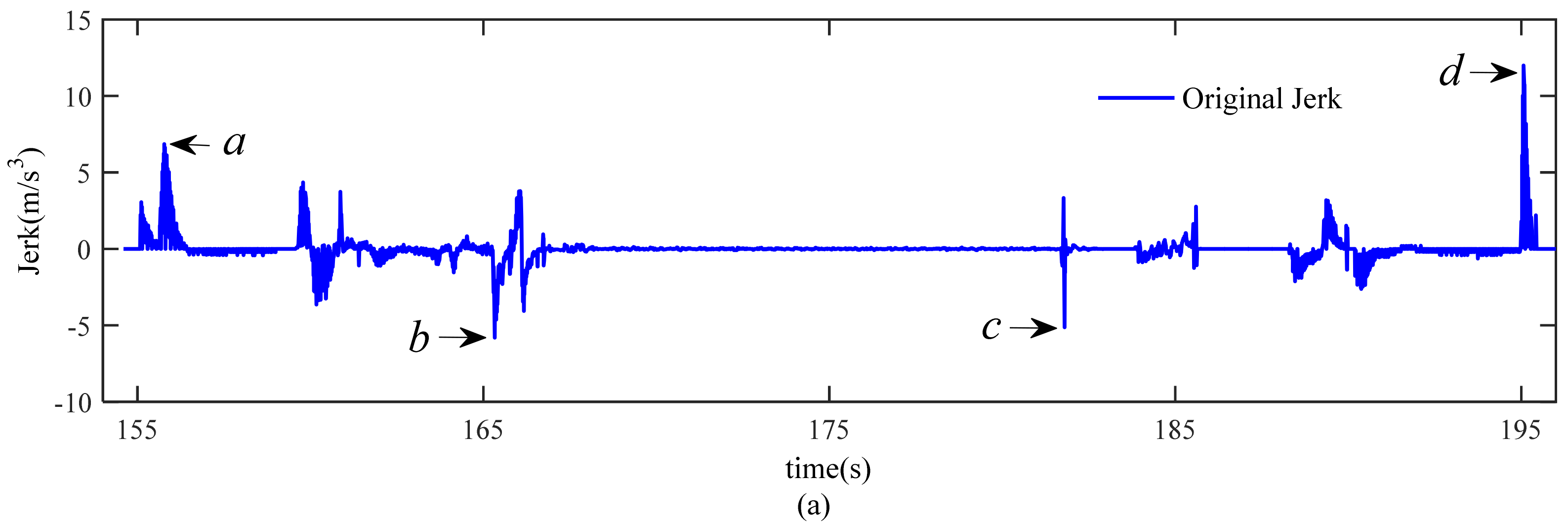
5.1. Vehicle Jerk Calculation
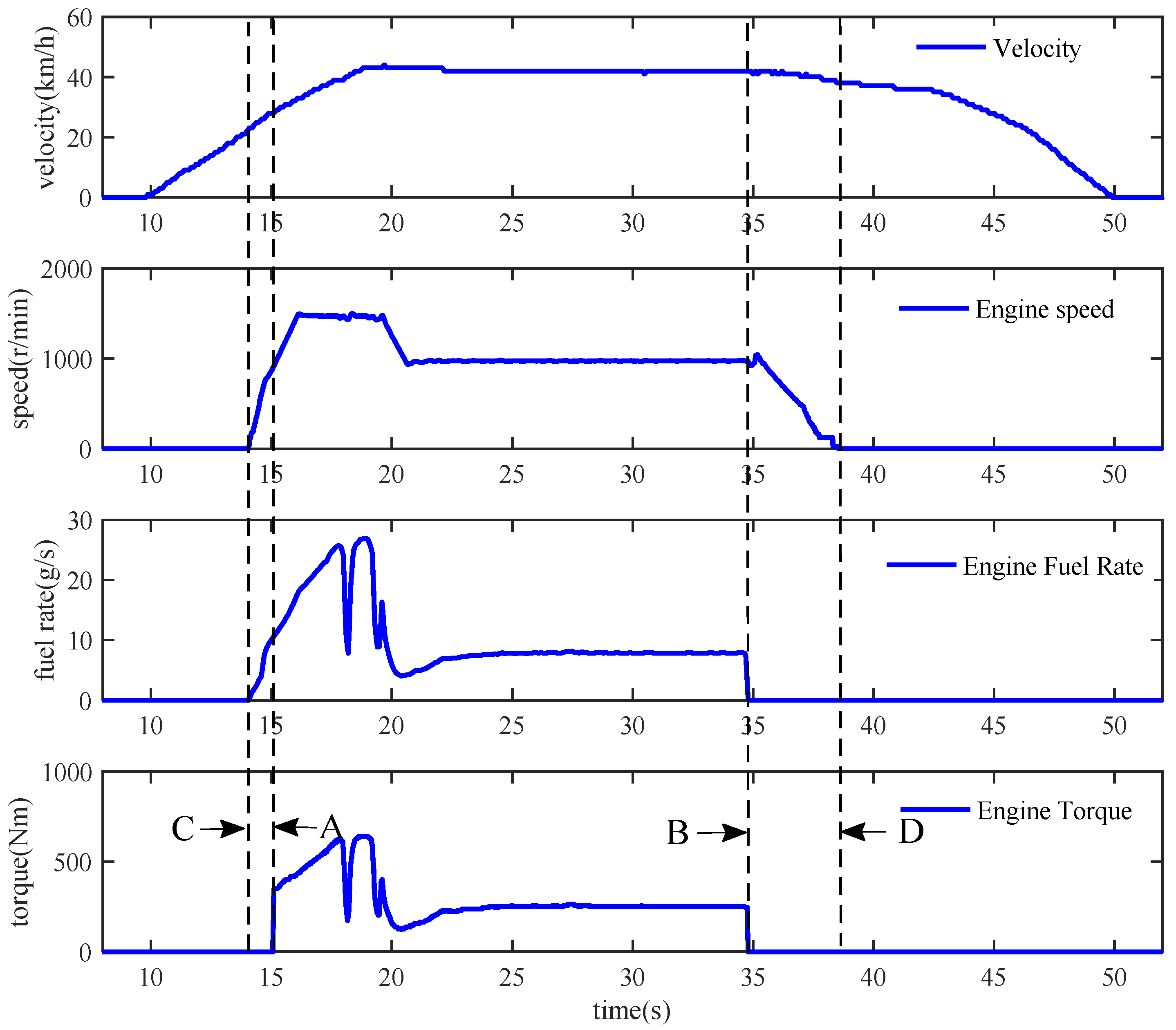
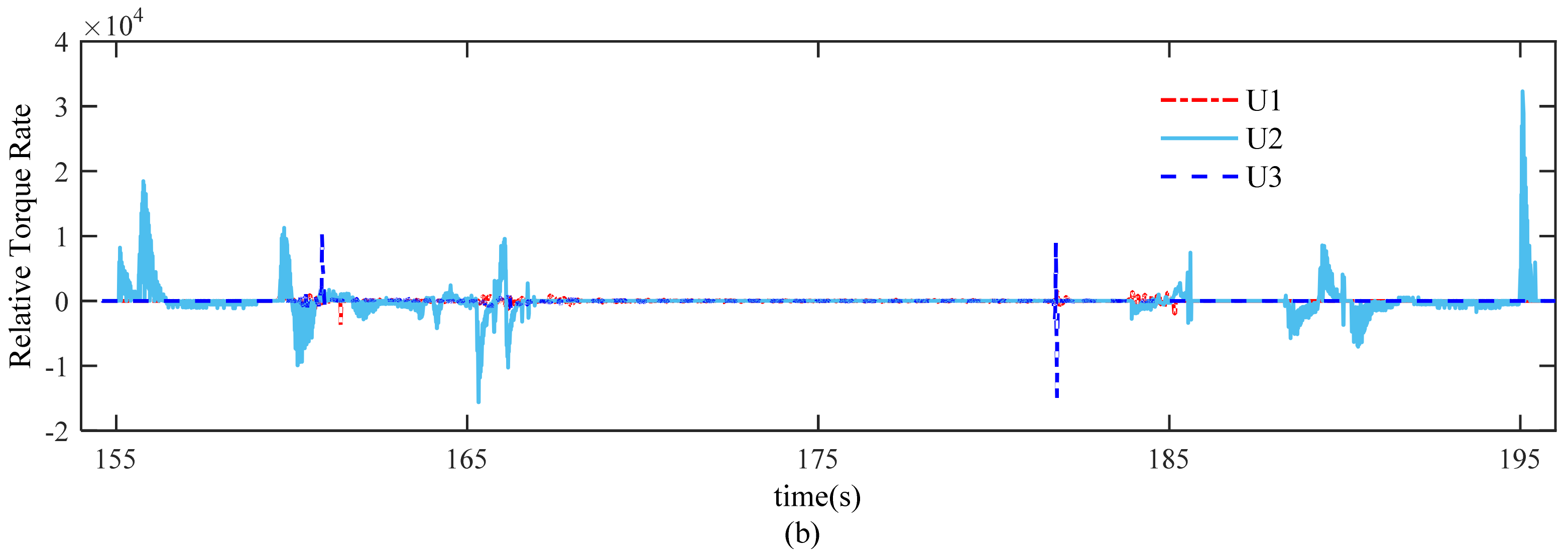
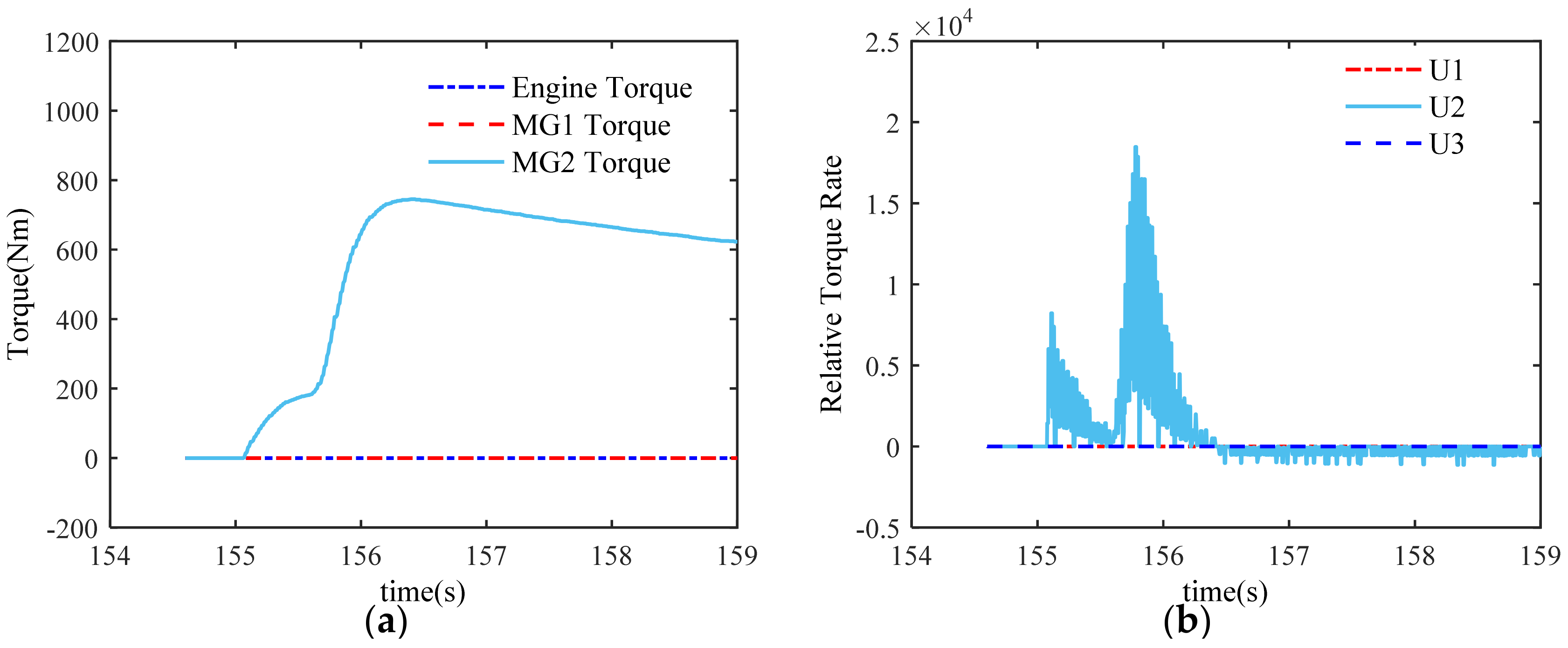
5.2. Jerk Detailed Analysis
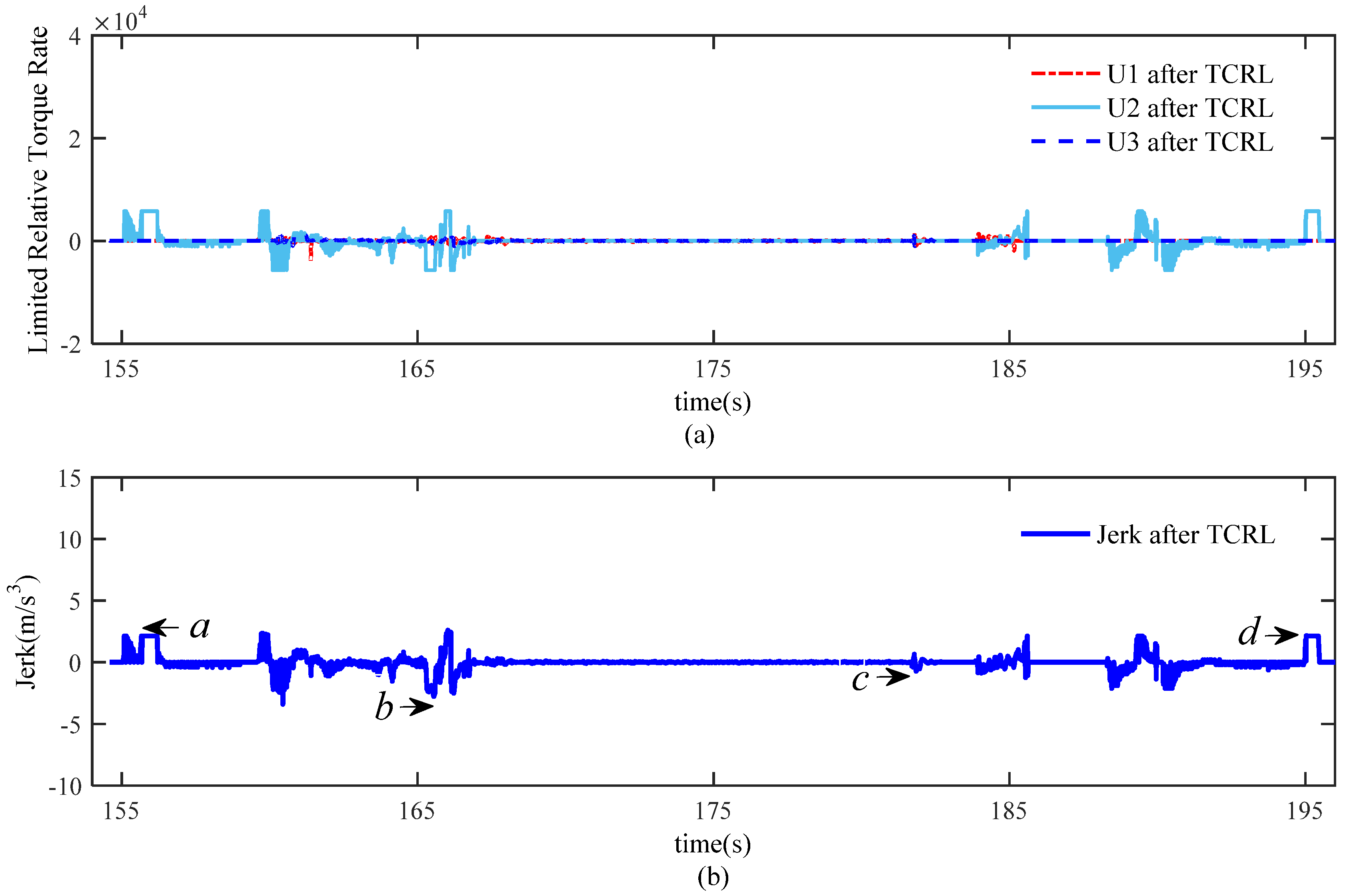
5.3. Anti-Jerk Method Based on Torque Changing Rate Limitation
6. Conclusions
- (1)
- With use of engine operating data acquired from real drive cycles, a full-time AEDM with emphasis on engine starting and stopping characteristics is developed. This full-time AEDM can fully predict the real-time engine dynamic torque over an arbitrary driving cycle. On the basis of the full-time AEDM, a high-fidelity data-driven vehicle dynamics model is established. This model has sufficient accuracy to replicate vehicle jerks occurring in real driving conditions.
- (2)
- A detailed jerk analysis reveals that sharp changes in power source torques is the main reason for intense jerks occurring in mode transition processes in real driving conditions. A practical control strategy based on power source TCRL is proposed with the premise of not compromising vehicle performance. Verification research indicates that the TCRL strategy can reduce the original vehicle jerk by a maximum of 85.82%. Thus, the riding comfort of the investigated power-split HEB is significantly improved.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Jayakumar, A.; Chalmers, A.; Lie, T.T. Review of prospects for adoption of fuel cell electric vehicles in New Zealand. IET Electr. Syst. Transp. 2017, 7, 259–266. [Google Scholar] [CrossRef]
- Hutchinson, T.; Burgess, S.; Herrmann, G. Current hybrid-electric powertrain architectures: Applying empirical design data to life cycle assessment and whole-life cost analysis. Appl. Energy 2014, 119, 314–329. [Google Scholar] [CrossRef] [Green Version]
- Xiong, W.W.; Zhang, Y.; Yin, C.L. Optimal energy management for a series-parallel hybrid electric bus. Energy Convers. Manag. 2009, 50, 1730–1738. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, N.; Song, D.; Zhang, C.; Wang, J.; Wang, J.; Wang, Q. Multi-factor integrated parametric design of power-split hybrid electric bus. J. Clean. Prod. 2016, 115, 88–100. [Google Scholar] [CrossRef]
- Peng, B.B.; Fan, Y.; Xu, J.H. Integrated assessment of energy efficiency technologies and CO2 abatement cost curves in China’s road passenger car sector. Energy Convers. Manag. 2016, 109, 195–212. [Google Scholar] [CrossRef]
- Finesso, R.; Spessa, E.; Venditti, M. Robust equivalent consumption-based controllers for a dual-mode diesel parallel HEV. Energy Convers. Manag. 2016, 127, 124–139. [Google Scholar] [CrossRef]
- Cacciatori, E.; Vaughan, N.D.; Marco, J. Evaluating the Impact of drivability requirements on the performance of an energy management control architecture for a hybrid electric vehicle. In Proceedings of the 2nd IEE Conference on Automotive Electronics, London, UK, 20–21 March 2006; Institution of Electrical Engineers: Stevenage, UK, 2006; pp. 297–320. [Google Scholar]
- Liu, D.; Zhang, J.; Zhang, D.; Liu, G.; Yu, H. Experimental and numerical analysis of the seat track vibrations caused by engine starts in a power-split hybrid electric vehicle. J. Automob. Eng. 2017, 231, 395–404. [Google Scholar] [CrossRef]
- Yoshioka, T.; Sugita, H. Noise and vibration reduction technology in hybrid vehicle development. SAE Tech. Pap. 2001. [Google Scholar] [CrossRef]
- Zou, L.; Zhang, J.; Yu, H. Vibration and acoustic investigation for a deep hybrid transmission with power-split compound planetary gear set. J. Mech. Eng. Sci. 2016, 230, 1331–1349. [Google Scholar] [CrossRef]
- Tong, Y.; Ouyang, M.; Zhang, J. Real-time simulation and research on control algorithm of parallel hybrid electric vehicle. Chin. J. Mech. Eng. 2003, 39, 156–161. [Google Scholar] [CrossRef]
- Koprubasi, K.; Westervelt, E.R.; Rizzoni, G. Toward the systematic design of controllers for smooth hybrid electric vehicle mode changes. In Proceedings of the American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 2985–2990. [Google Scholar]
- Beck, R.; Richert, F.; Bollig, A.; Abel, D.; Saenger, S.; Neil, K.; Scholt, T.; Noreikat, K.-E. Model predictive control of a parallel hybrid vehicle drivetrain. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 2670–2675. [Google Scholar]
- Gao, B.; Liang, Q.; Xiang, Y.; Guo, L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Process. 2015, 50, 615–631. [Google Scholar] [CrossRef]
- Moriya, K.; Ito, Y.; Inaguma, Y.; Sato, E. Design of the surge control method for the electric vehicle powertrain. SAE Tech. Pap. 2002. [Google Scholar] [CrossRef]
- Du, B.; Qin, D.; Yang, Y. Coordinated control strategies for a full hybrid electric vehicle with single motor during mode changes. Int. J. Electr. Hybrid Veh. 2016, 8, 19–40. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Z.; Zhang, T.; Li, M. Mode transition coordinated control for a compound power-split hybrid car. Mech. Syst. Signal Process. 2017, 87, 192–205. [Google Scholar] [CrossRef]
- Zhu, F.; Chen, L.; Yin, C.; Shu, J. Dynamic modelling and systematic control during the mode transition for a multi-mode hybrid electric vehicle. J. Automob. Eng. 2013, 227, 1007–1023. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, N.; Wang, J.; Song, D.; Zhang, N.; Shang, M.; Liu, J. Predictive-model-based dynamic coordination control strategy for power-split hybrid electric bus. Mech. Syst. Signal Process. 2015, 60, 785–798. [Google Scholar] [CrossRef]
- Minh, V.T.; Rashid, A.A. Modeling and model predictive control for hybrid electric vehicles. Int. J. Automot. Technol. 2012, 13, 477–485. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, D.; Zhang, X.; Chen, Z. Probability based remaining capacity estimation using data-driven and neural network model. J. Power Sources 2016, 315, 199–208. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, B. Online capacity estimation of lithium-ion batteries based on novel feature extraction and adaptive multi-kernel relevance vector machine. Energies 2015, 8, 12439–12457. [Google Scholar] [CrossRef]
- Sun, J.; Xing, G.; Zhang, C. Data-Driven Predictive Torque Coordination Control during Mode Transition Process of Hybrid Electric Vehicles. Energies 2017, 10, 441. [Google Scholar] [CrossRef]
- Hong, J.; Gao, B.; Lv, L.; Hu, Y.; Chen, H. Engine Speed Control During Gear Shifting of AMT HEVs with Identified Intake-to-Power Delay. IFAC-PapersOnLine 2016, 49, 793–799. [Google Scholar] [CrossRef]
- Zhang, Y.; Luo, Q.; Ma, X.; Gong, Z. Research Method of the Dynamic Characteristics of Diesel Engine. J. Acad. Armored Force Eng. 2006, 6, 32–35. [Google Scholar] [CrossRef]
- Yunbing, Y.; Huaming, C.; Guangde, Z. Estimation of engine torque for parallel hybrid electric vehicle. Automot. Eng. 2008, 30, 117–120. [Google Scholar] [CrossRef]
- Yi, T. Study on the Coordinated Control Issue in Parallel Hybrid Electric System; Library of Tsinghua University: Beijing, China, 2004. [Google Scholar]
- Arcaklioğlu, E.; Çelıkten, İ. A diesel engine’s performance and exhaust emissions. Appl. Energy 2005, 80, 11–22. [Google Scholar] [CrossRef]
- Cay, Y. Prediction of a gasoline engine performance with artificial neural network. Fuel 2013, 111, 324–331. [Google Scholar] [CrossRef]
- Ge, Y.; Huang, Y.; Hao, D.; Li, G.; Li, H. An indicated torque estimation method based on the Elman neural network for a turbocharged diesel engine. J. Automob. Eng. 2016, 230, 1299–1313. [Google Scholar] [CrossRef]
- Hu, L.; Zhang, G.; Yan, Y.; Chen, H. Engine Dynamic Torque Estimation for Parallel Hybrid Electric Vehicle Based on Neural Network. Auto Mob. Sci. Technol. 2007, 4, 11–14. [Google Scholar] [CrossRef]
- Xiang, C.; Huang, K.; Ma, Y.; Zhao, Y. Stability analysis for mode switch of multi-mode electro-mechanical transmission. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–7. [Google Scholar]
- Park, T.; Kim, H.; Kim, J.; Han, K.; Hong, J.; Lee, H. Powertrain modeling for analyzing the transient response of the parallel HEV. In Proceedings of the 24th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium and Exhibition (EVS 24), Stavanger, Norway, 13–16 May 2009. [Google Scholar]
- Rezaei, J.; Shahbakhti, M.; Bahri, B.; Aziz, A.A. Performance prediction of HCCI engines with oxygenated fuels using artificial neural networks. Appl. Energy 2015, 138, 460–473. [Google Scholar] [CrossRef]
- Wang, W. Neural Network and Its Application in Automobile; Beijing Institute of Technology Press: Beijing, China, 1998; pp. 1–5. [Google Scholar]
- Guo, L.; Ge, A.; Zhang, T.; Yue, Y. AMT shift process control. Trans. Chin. Soc. Agric. Mach. 2003, 34, 1–3. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| Gross vehicle mass | 12,000 kg | |
| Wheel radius | 0.51 m2 | |
| Air drag coefficient | 0.4 | |
| Vehicle frontal area | 9.0 m2 | |
| Final drive ratio | 4.88 | |
| Gravitation acceleration | 9.81 m/s2 | |
| PG1 characteristic parameter | 2.63 | |
| PG2 characteristic parameter | 2.11 | |
| Moment of inertia of engine | 1.35 kg·m2 | |
| Moment of inertia of MG1 | 0.33 kg·m2 | |
| Moment of inertia of MG2 | 0.33 kg·m2 | |
| Moment of inertia of ring gear | 0.0015 kg·m2 | |
| Moment of inertia of sun gear | 0.0015 kg·m2 | |
| Moment of inertia of planetary carrier | 0.0015 kg·m2 |
| Cycle | Maximum Error (%) |
|---|---|
| Cycle 1 | 4.71 |
| Cycle 2 | −3.75 |
| Cycle 3 | −2.77 |
| Cycle 4 | −2.32 |
| Cycle 5 | −5.01 |
| Cycle 6 | −2.75 |
| Peak-Jerk Number | Intensity (m/s3) | Maximum Relative Torque Variation Rate | Reason for Each Peak-Jerk Point |
|---|---|---|---|
| a | 6.851 | (MG2) | At EV launch mode, MG2 torque increases rapidly |
| b | −5.806 | (MG2) | EVT-S mode switches to EVT-E mode, MG2 torque declines rapidly |
| c | −5.133 | (Engine) | EVT-E mode switches to RB mode, engine stops with torque declining rapidly |
| d | 11.99 | (MG2) | Exiting RB mode, MG2 stops with torque declining rapidly |
| Peak-Jerk Number | Jerk before TCRL (m/s3) | Jerk after TCRL (m/s3) | Jerk Reduction (%) |
|---|---|---|---|
| a | 6.851 | 2.129 | 68.92 |
| b | −5.806 | −2.365 | 59.27 |
| c | −5.133 | −0.728 | 85.82 |
| d | 11.99 | 2.133 | 82.21 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Cui, H.; Song, D.; Yang, N.; Liu, T.; Chen, H.; Wang, Y.; Lei, Y. Jerk Analysis of a Power-Split Hybrid Electric Vehicle Based on a Data-Driven Vehicle Dynamics Model. Energies 2018, 11, 1537. https://doi.org/10.3390/en11061537
Zeng X, Cui H, Song D, Yang N, Liu T, Chen H, Wang Y, Lei Y. Jerk Analysis of a Power-Split Hybrid Electric Vehicle Based on a Data-Driven Vehicle Dynamics Model. Energies. 2018; 11(6):1537. https://doi.org/10.3390/en11061537
Chicago/Turabian StyleZeng, Xiaohua, Haoyong Cui, Dafeng Song, Nannan Yang, Tong Liu, Huiyong Chen, Yinshu Wang, and Yulong Lei. 2018. "Jerk Analysis of a Power-Split Hybrid Electric Vehicle Based on a Data-Driven Vehicle Dynamics Model" Energies 11, no. 6: 1537. https://doi.org/10.3390/en11061537