1. Introduction
The aerospace industry is promoting the use of more electrical technology to enhance the performance and increase the reliability of aircraft power systems and secondary power subsystems instead of hydraulic, pneumatic systems. High voltage DC systems (HVDCs) are very popular in aircraft electric power systems because of their simpler equipment and significant energy savings. This technology requires high power density, reliable DC-DC converter for the application of battery storage power supplies to mission critical aerospace situations, e.g., actuators and avionics. DAB converters, as the interface of energy storage devices, have become a research hotspot [
1,
2]. The DAB converter has been popular among researchers over the last ten years due to its high performance, high efficiency, galvanic isolation and soft-switching property [
3,
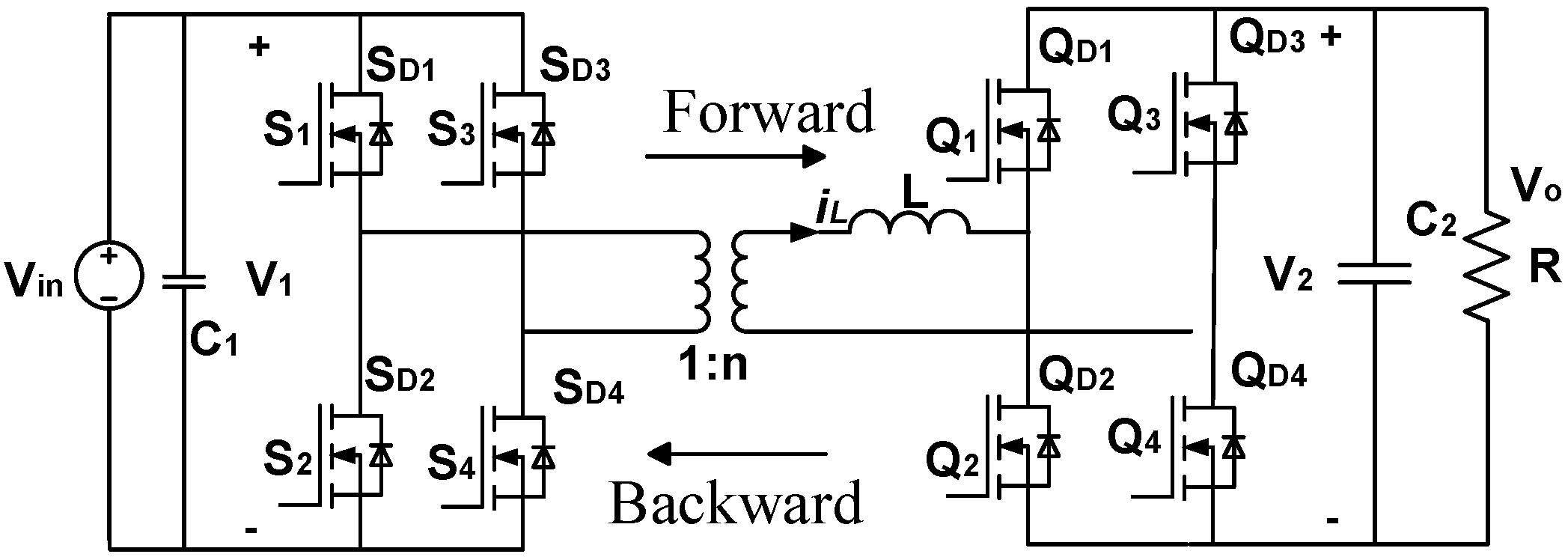
4]. A DAB converter’s topology is shown in
Figure 1. Because of the extra power switching devices, the pressure and flow capacity of the power switching are strong, so a larger power can be transmitted [
5], but there are also some shortcomings [
6], such as the increase of the inductance current value will increase the switching loss and switching stress make the switching device become damaged easily. In addition, there is a negative power transmission in the DAB converter, the circulation loss is large, so the transmission power peak in the circuit is increased, and the weight and volume of the transformer will be increased, which is not acceptable in aerospace context. The saturation of high frequency transformers will be caused by the DC bias component existing in the inductance current under the load transient variation, therefore, it how to optimize the dual active bridge DC-DC converter in aircraft electrical power systems has important practical significance.
At present, there are four main DAB converter topologies: single-phase/three-phase voltage source, single-phase current source, and single-phase resonant type. Control methods mainly focus on the phase shift control strategy, including single phase shift, double phase shift, expansion double phase shift, triple phase shift, phase shift plus pulse width modulation (PWM) hybrid control strategy, and model predictive control methods [
7,
8,
9,
10,
11,
12,
13]. The single phase shift control strategy is simple and easy to realize, but the range of output power is narrow and reverse power exists. Multiple phase-shifting control methods have increased control variables, and the combination selection and calculation of multivariable is the key points to controlling the performance of DAB converters.
So far, many efforts have been made to improve the performance of DAB converters. Nevertheless, design considerations for high frequency DAB converter transformers are primarily concerned with core material, loss minimization, and suppression of DC bias components. The concept of global optimal condition (GOC) equations is proposed in [
14] to derive the closed form of analytic expressions of an optimal modulation scheme that makes the DAB converter operate with minimized root-mean-square (RMS) current during whole power range with different operating modes. Aiming to improve the performance features of conventional two-level DAB converters, reference [
15] presented a three-level neutral-point-clamped (NPC) DAB DC-DC converter. A set of decoupled optimization problems is formulated as a function of the available modulation degrees of freedom to minimize the predominant converter losses. A current-stress-optimized switching strategy is applied in [
16] based on Isolated Bidirectional DC-DC Converter (IBDC) to minimize the current stress, improve the system efficiency, and increase system power transmission capability, and these performances are particularly effective for operation conditions with high voltage conversion ratio and light load. The model predictive control algorithm is used to improve the efficiency of DAB converter in [
17]. A unit prediction horizon binary search-based nonlinear model predictive control (MPC) of phase shift full-bridge DC-DC converter is presented in [
18], which offers faster optimization solution for MPC, thereby facilitating high frequency operation of the converter, thus the output voltage regulation performance is improved. By investigating the influence of the perturbation of control variables on the transferred power and the RMS value of the inductance current, a global optimal condition is deduced in [
19]. A multi-objective optimization routine is proposed to systematically assess the concepts with respect to the efficiency, power density, and the costs with the 3 and 5-Level DAB converter in [
20]. A detailed power loss model of a DAB converter was derived in this paper, but the dynamic control methods based on optimization are not regarded. A minimized RMS current operation methods for the dual active half-bridge (DAHB) DC-DC converters is presented in [
21]. In this paper, closed-form expressions corresponding to two control strategies are derived which minimize RMS value must be consistent value of transformer current at a given power with and without zero voltage switching (ZVS) operation. The other optimal objectives are not discussed in this paper.
A novel method which can achieve the multi-objective optimization for the performance in DAB converters is proposed in this paper. Using this genetic-algorithm optimization methods based on the dual phase shift control, the performance features of DAB converters such as high efficiency, low dc bias component and low stress to switching device can be realized considering the constraints such as ZVS conditions in DAB converter.
This paper is organized as follows:
Section 2 introduces the operating principle of the DAB converter, from two aspects of steady state and transient state, and some power characteristic formulas are derived. In
Section 3, the multi-objective optimization model is established on the basis of the
Section 2, and the genetic algorithm is used to solve the optimal control variable for the power mode of DAB converter. Simulation and hard in loop (HIL) experimental results for optimization on the platform of software platform MATLAB/Simulink 2012 (The MathWorks Ltd, Natick, MA, USA) and HIL platform typhoon 600 are delivered in
Section 4. The experimental verification is described in
Section 5. Finally,
Section 6 presents our conclusions.
2. The Establishment of Optimization Model
In the DAB converter’s power transmission process, the coupled inductor
L plays a very important role, transmitting power either from the low voltage side to the high voltage side of the converter, or from the high side to the low side, it uses of an inductance
L is needed as the power transmission medium. Therefore, the inductance selection has a great influence on the operating ability of the DAB converter. The research on the input and output characteristics of the DAB converter will start with the analysis of the inductance current
iL.
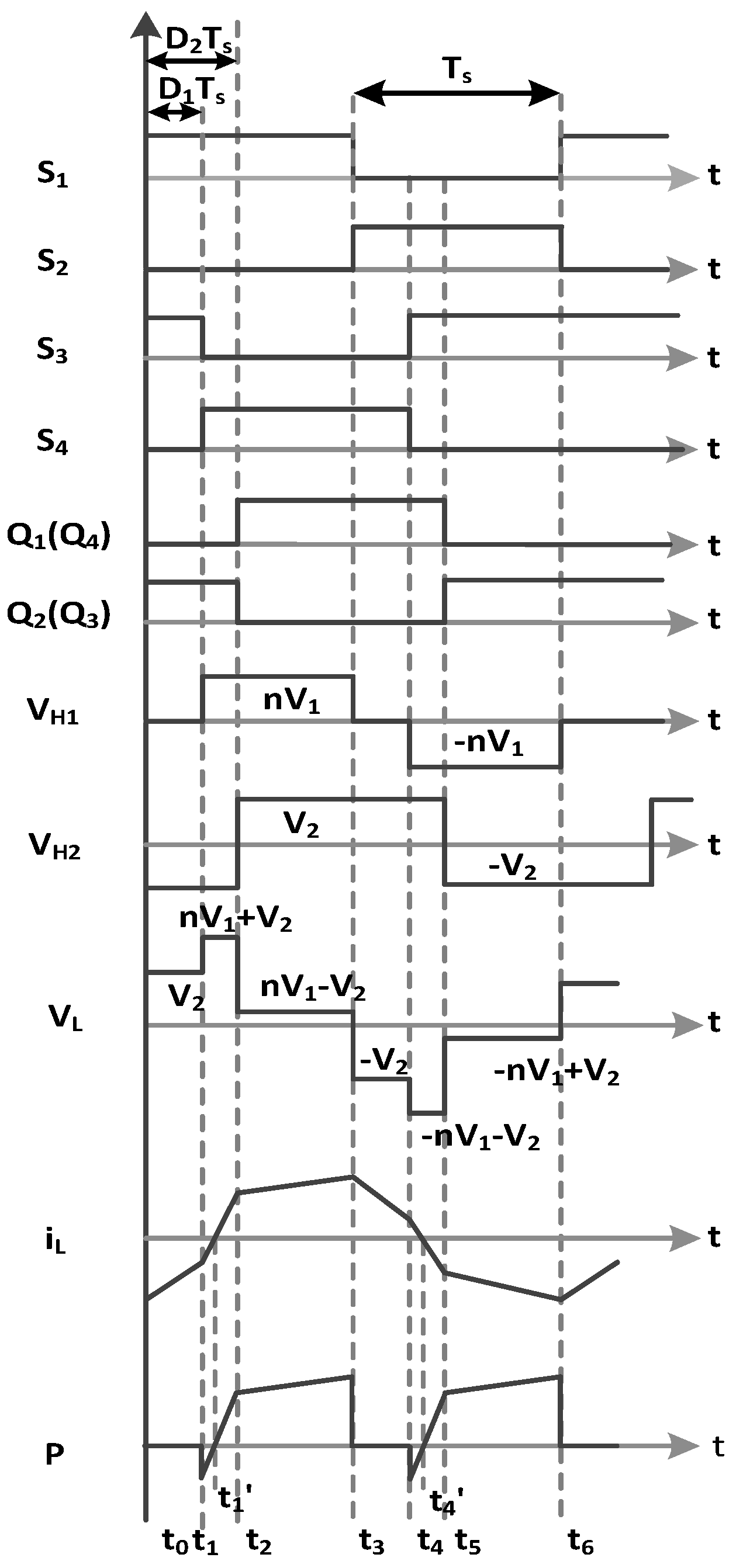
Figure 2 is the main circuit waveform including
iL in a switching cycle. The
VH1 and
VH2 are the primary side voltage and secondary side voltage of high frequency transformers in
Figure 2. Align equations and symbols
2.1. Steady State Performance Analysis
According to the principle of current ampere second equilibrium, the average of the inductance current is 0 within a switching period:
The peak current of each time point can be derived from
Figure 2:
Because the magnitude of the effective current of inductor current directly affects the copper consumption of transformer and the state loss of semiconductor device [
22], it is necessary to derive the expression of the RMS value square of inductance current as follows:
In order to reduce the loss of the converter, the minimum RMS value of inductance current was chosen as one of the optimization objective functions.
The average output power can be calculated as follow:
and it can be concluded that, when
D1 = 0,
D2 = 0.5, the maximum average output power is:
When the output load is
R,
PO can also be expressed as:
Combining with Equation (4) we can obtain:
Because the DAB converter requires 28 V DC voltage output, V2 = 28 V will be one of the constraints of this optimization model.
2.2. Reverse Power and Transient DC Bias Component Analysis
It can be seen from
Figure 2 that in the power transmission process, negative power has a reverse power flow direction. The negative power is a kind of reactive power, it increases the apparent power of the power transmission process in the circuit, meanwhile the losses of the circuit and devices are also increased. The increase of the power loss of the whole power converter can further reduce the efficiency of power transmission of the DAB converter. When the reverse negative power decreases, the peak value of the transmitted power also decreases, which reduces the switching stress of the power switching device and reduces the demand for the high frequency transformer capacity and thus reduces the power volume of the transformer under design. Therefore, in order to improve the performance of the converter, it is necessary to reduce the reverse negative power of the converter as much as possible.
Deduce the time
of the inductance current
iL is 0, that is:
The reverse negative power can be obtained from this:
Bring Equation (10) into Equation (11) and can be obtained:
It can be seen that we can suppress the reverse negative power by optimizing the combination of D1 and D2, thus we choose P−avg minimum as one of the optimization objective functions.
In the circuit operating process, because of the difference of the parameters of the components or the asymmetry of circuit layout, the on-state voltage drop is not equal , the difference of the turn off time when the power switch is turned off, the power transistor trigger factors of pulse signal is asymmetric, and the current waveform of the high frequency transformer in the DAB converter cannot have ideal symmetry, therefore, the dc bias becomes a practical issue because of the inconsistency between theory and practice. According to these factors, the magnetization curve of the iron core is not symmetric about the origin of coordinates, and the magnetization curve is usually a nonlinear curve, so when there is very serious dc bias current, iron core will enter a saturation state, causing the magnetizing current to increase significantly, thus increasing the loss of the converter and even causing damage to the switching device [
23,
24,
25].
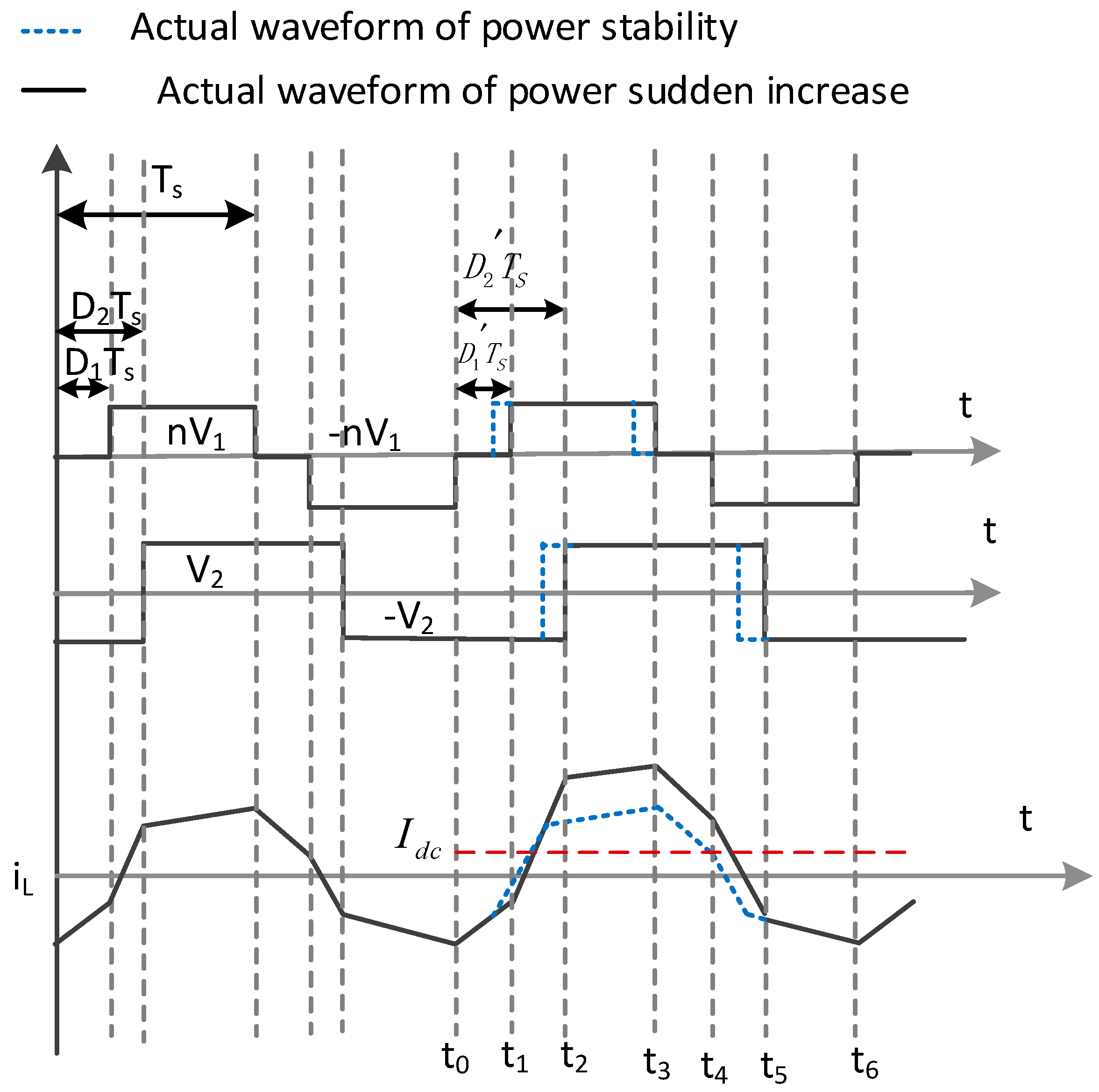
Therefore, it is necessary to analyze and suppress this bias component. According to [
16], the expression of DC bias is deduced to be used for subsequent suppression. The converter in positive mode (in buck mode), using a sudden increase in output power as an example, as shown in
Figure 3,
t0 moments ago, the converter stability and inductor current waveform were symmetrical, at time
t0, with a power surge, if the converter internal and external shift duty noted before the power surge are
D1 and
D2, respectively, after the power mutation, the converter internal and external shift duty ratio are refreshed to
and
respectively,
and
, then, with the increase of phase angle, the maximum value of the inductor current increases, and the DC bias component will exist for even a few cycles.
DC bias component can be calculated according to the first cycle of:
After the analysis above, this paper will select the minimum Idc as one of the optimization objective functions.
In order to realize the high frequency, high efficiency and low loss operation for the converter, soft switching technology is often used. The requirements of the DAB converter to implement ZVS are:
Substituting Equation (2) into Equation (14), and the following simplification can be obtained:
Equation (15) will be considered as the constraint condition of the optimization model.
According to the requirements of
Table 1, some function 3-D diagrams are drawn as follows.
From
Figure 4a, it can be seen that under the premise of
, the closer the
D1 and
D2 are, the smaller the
is. This result can be used as one of the screening bases for the
D1 and
D2 combination.
Figure 4b proves that when
D1 = 0,
D2 = 0.5
It can be seen in
Figure 4c, that when
,
,
Idt is smaller this range can be used as one of the screening criteria.
As can be seen from
Figure 4d, each
PO corresponds to many
, so it is necessary to limit
. According to the rightmost point of the image,
should not exceed 1000 when solving the optimization model. This result will be used as an additional constraint.
3. The Optimal Solution of Power Model of DAB Converter
Based on the above analysis, the optimization model of the DAB converter based on the extended phase shift control can be obtained according to the above analysis.
Design variables: the interior angle , and the external angle , where: , , , , .
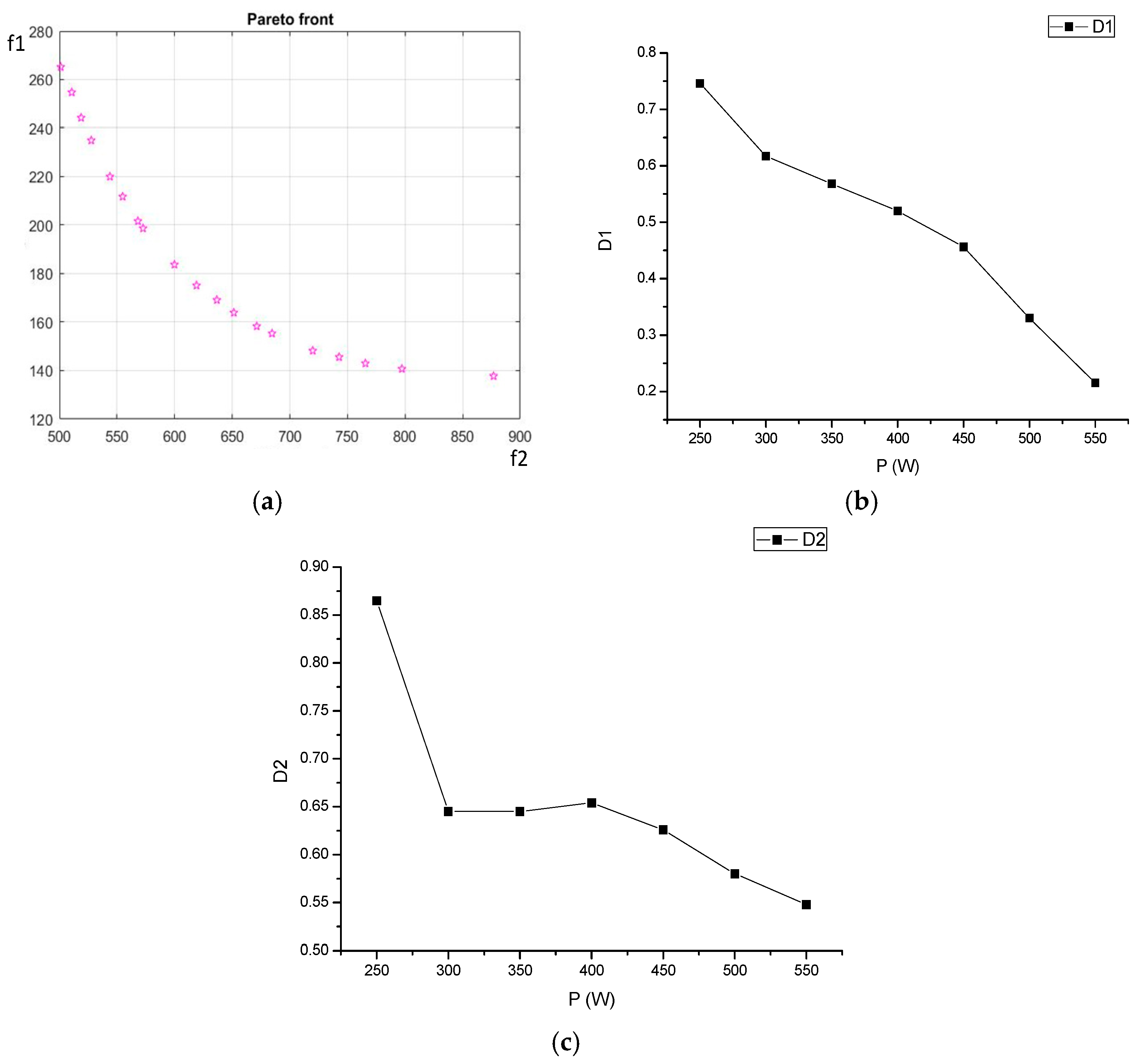
Genetic algorithm is an adaptive probability optimization algorithm that solves complex system optimization problems with the help of biological genetics and evolutionary ideas. It does not depend on the research object. Using the multi-objective genetic algorithm in the MATLAB genetic algorithm toolbox, the above models are solved, and a set of internal and external phase shift angles corresponding to the variation of load power are obtained, which is shown in
Table 2. The Toolbox’s configuration is shown in following: Solver: gamultiobj; Population size: 1000; Pareto front population fraction: 0.02; Generations: 1000; Function tolerance: 1e-8; Constraint tolerance: 0.01. All the variables and parameters must be normalized. The Pareto front curve for the rated conditions is shown in
Figure 5a. The terms
f1 and
f2 respectively correspond to the optimized objects. That is the optimization result, which is an important basis for our subsequent simulation and experiments. According to the
Table 2, the basic relationship between the load power and phase shift angle
D1,
D2 can be as shown in
Figure 5b,c.
5. Verification of Experiment Prototype Hardware
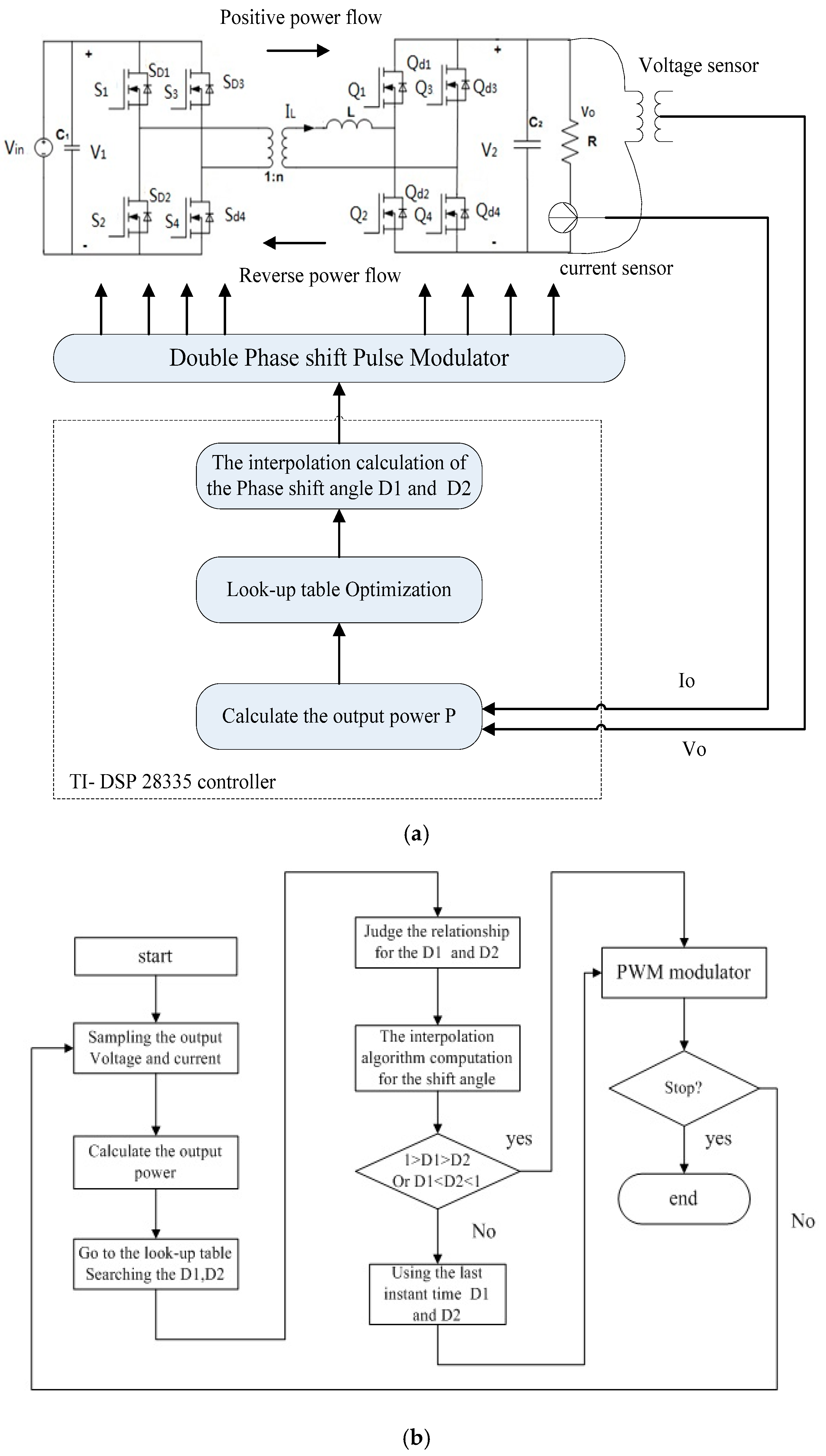
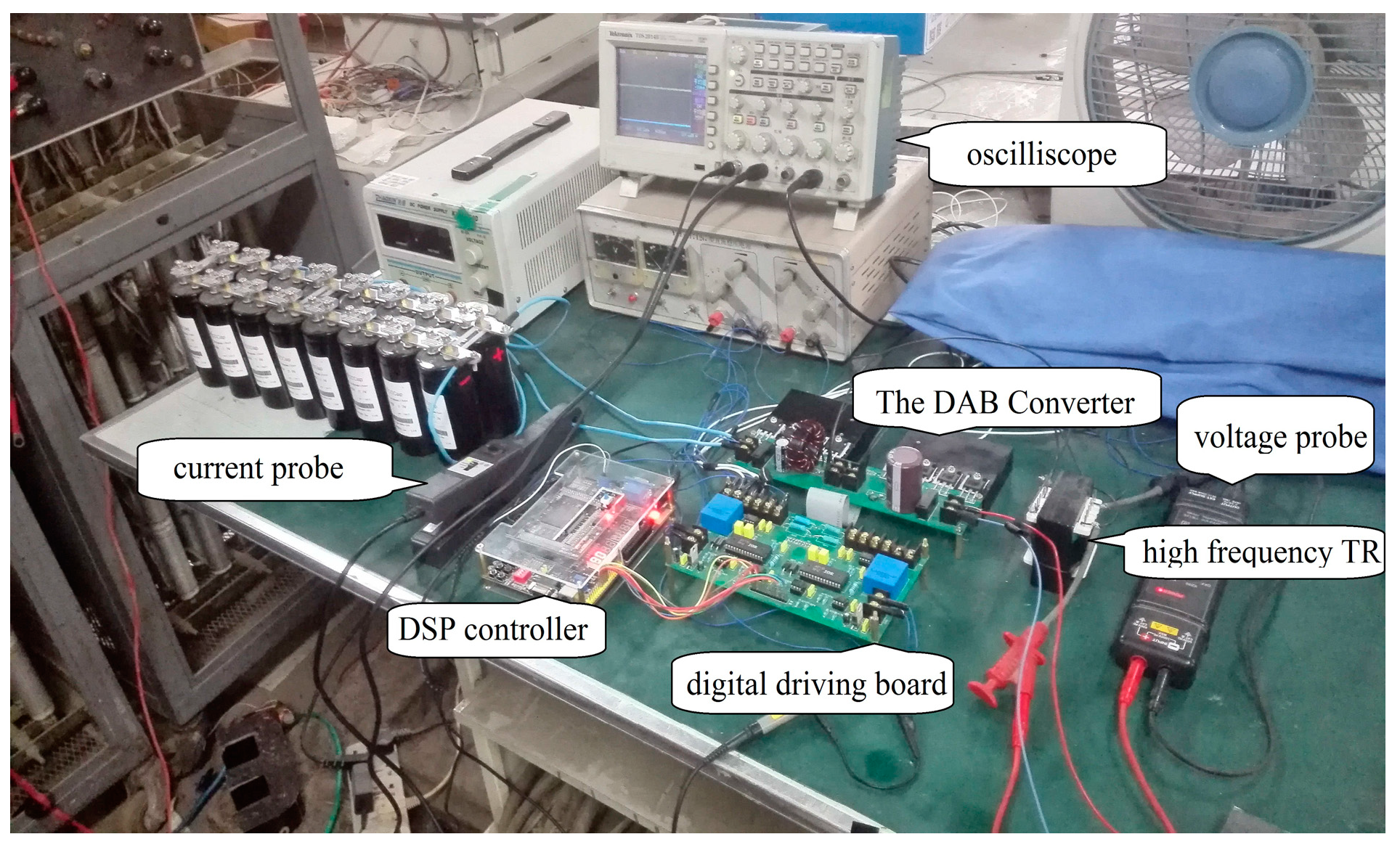
A prototype DAB converter was designed for verification of the proposed scheme. A 200–600 W scaled down DAB converter has been developed. The schematic layout of experimental set-up is presented in
Figure 18. During the experimentation, an aerospace high voltage DC source (270 V DC) was used for power supply. In the DAB converter, the power switching device in high voltage side was a International Rectifier-MOSFET IRF460P (Infineon Technologies AG, Neubiberg, Germany), and on the low voltage side it is an IRF150P.
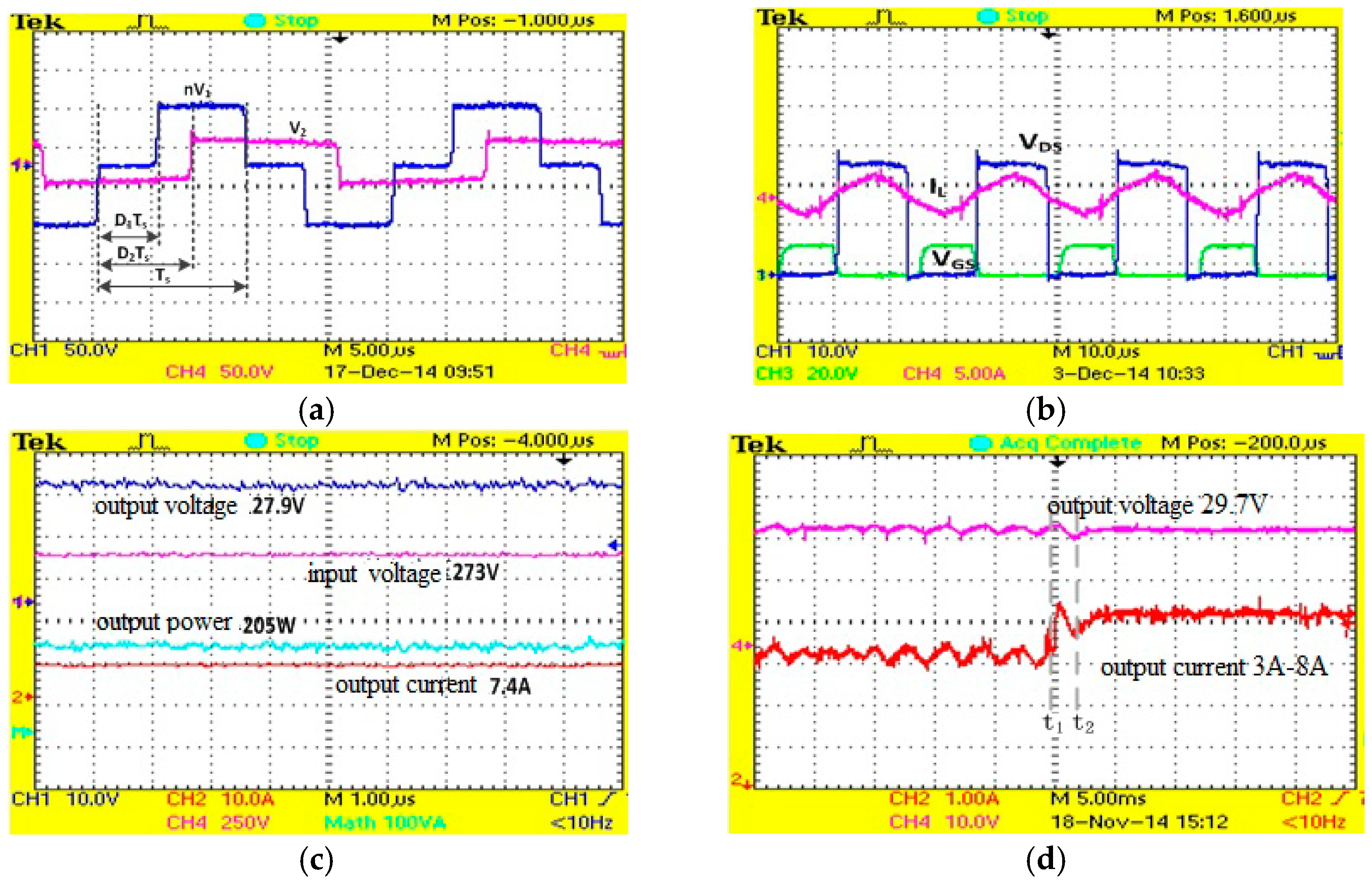
The experimental verification of DAB converter is carried out by using a DSP28335 DSP digital controller, All the control algorithms were downloaded into this controller. The results of the experiments are shown in
Figure 19. From
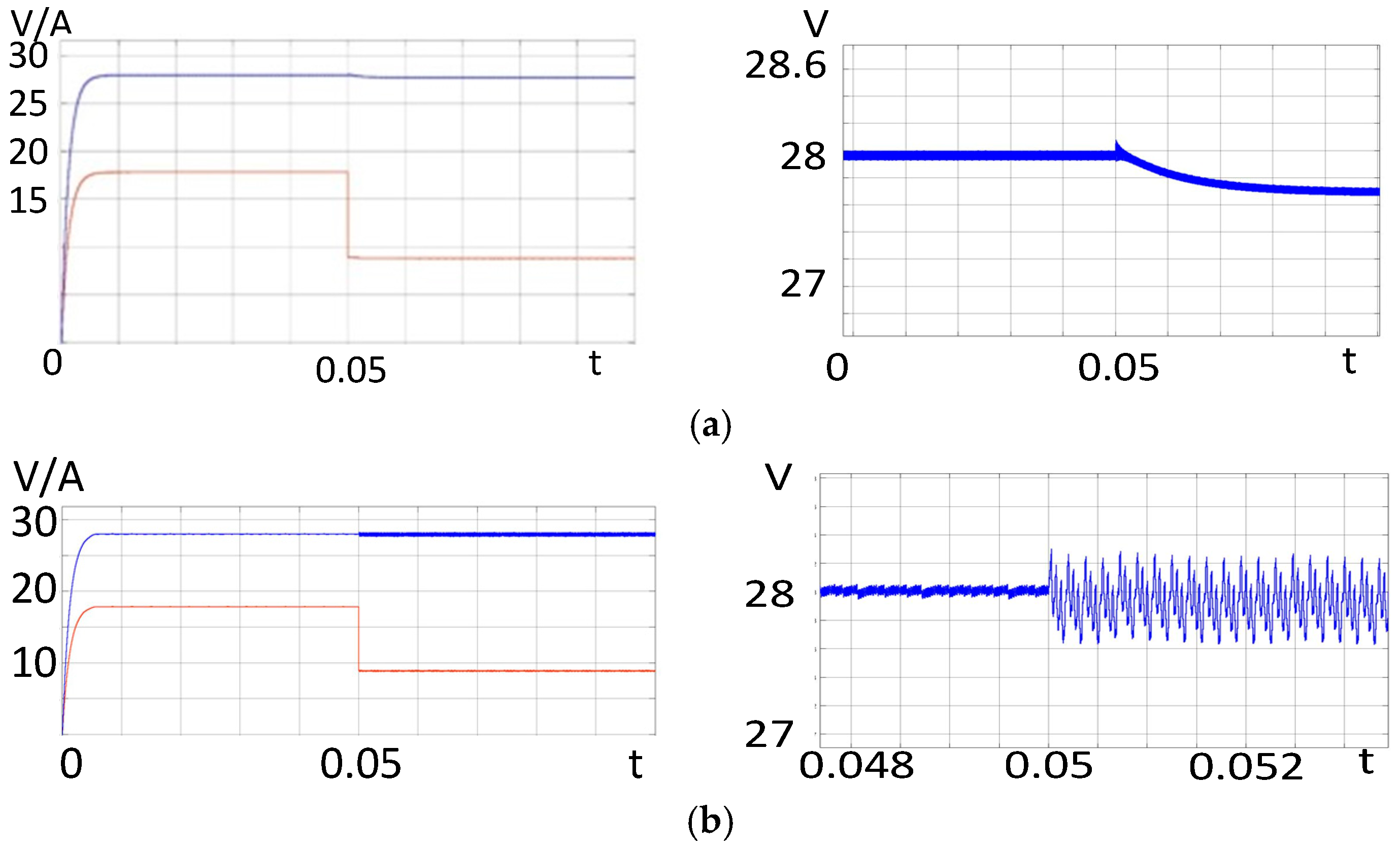
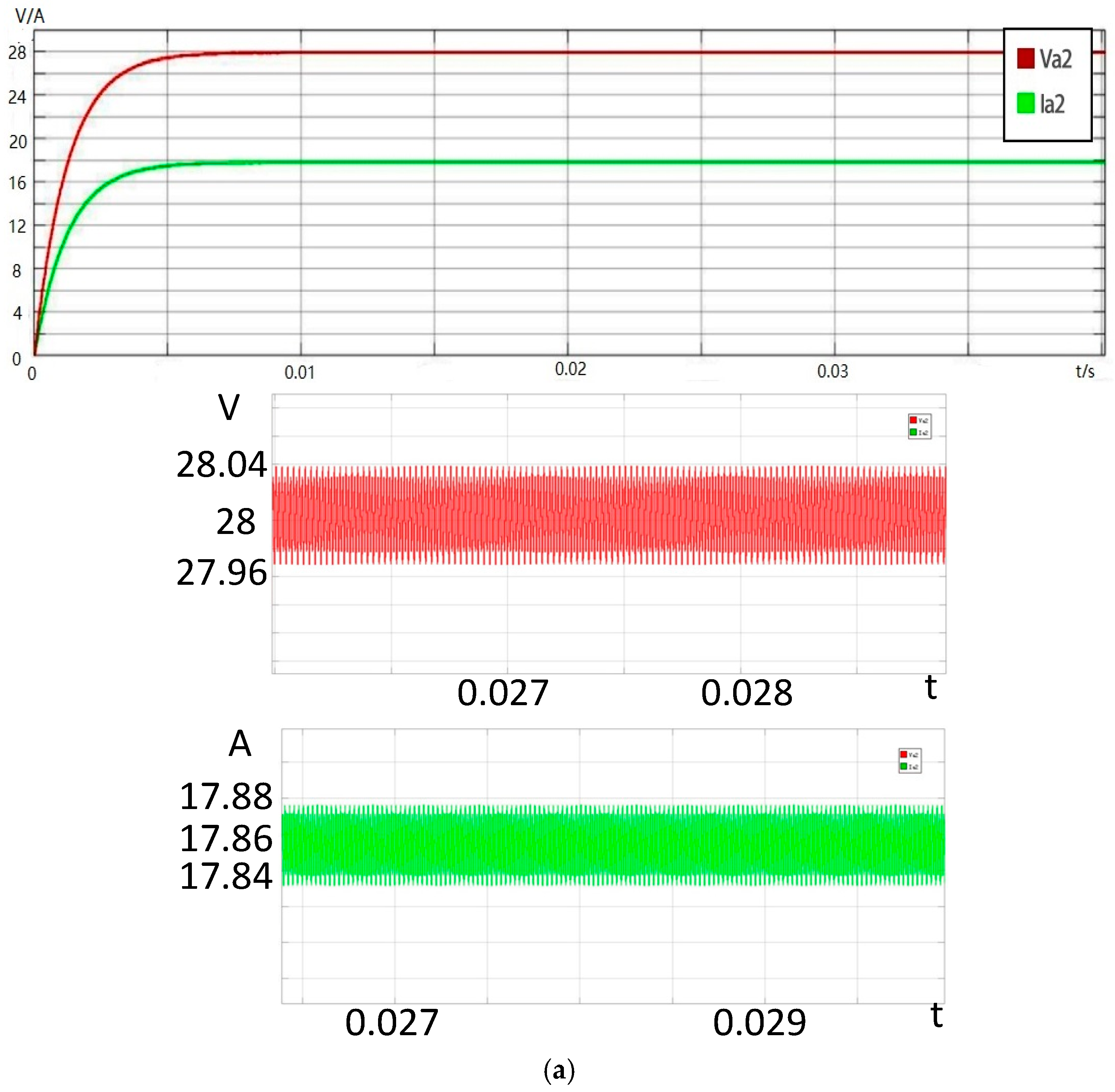
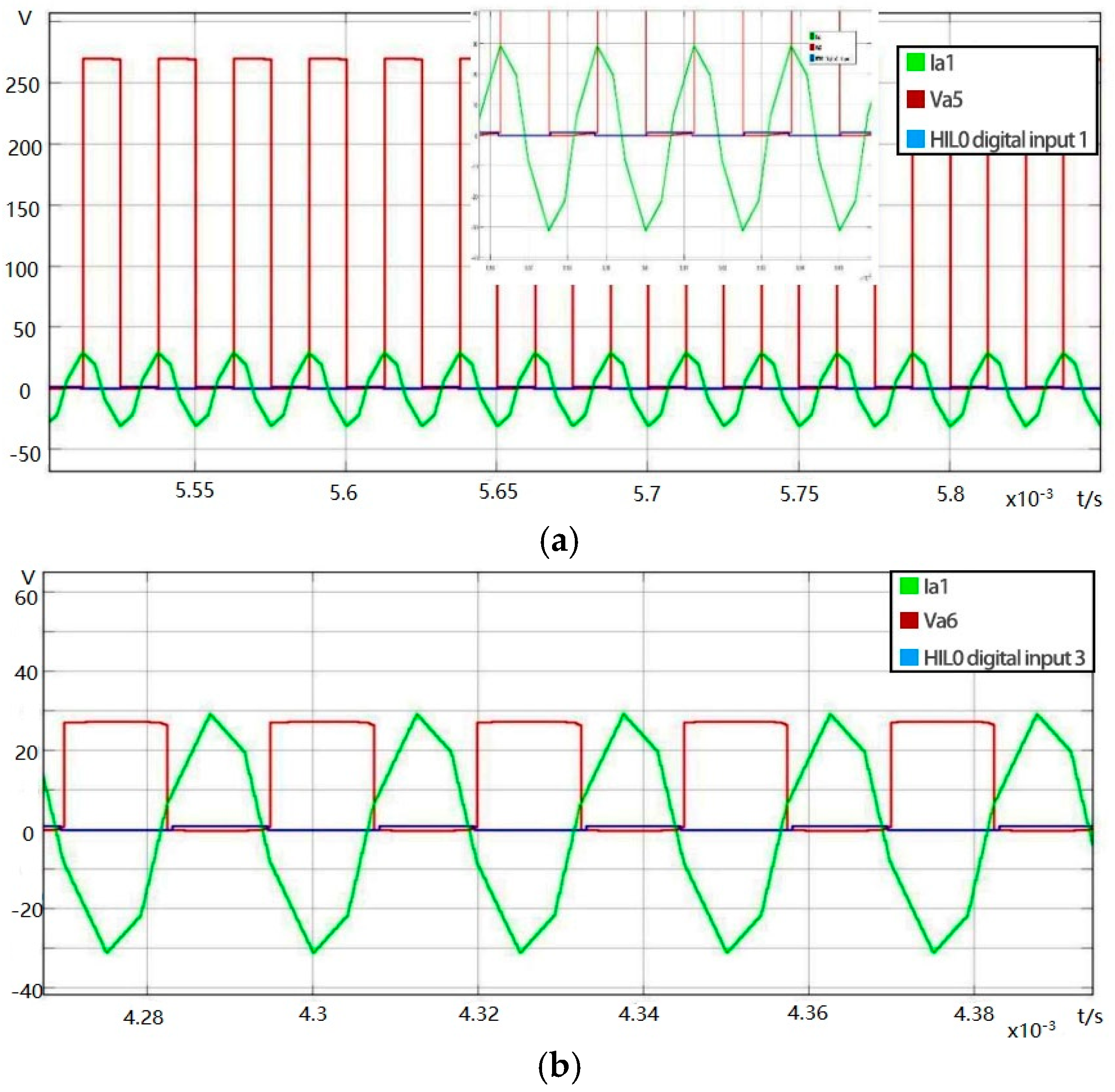
Figure 19a, the steady state characteristic for the output voltage can be achieved by the proposal controlling methods based on the multi-objective optimization. In
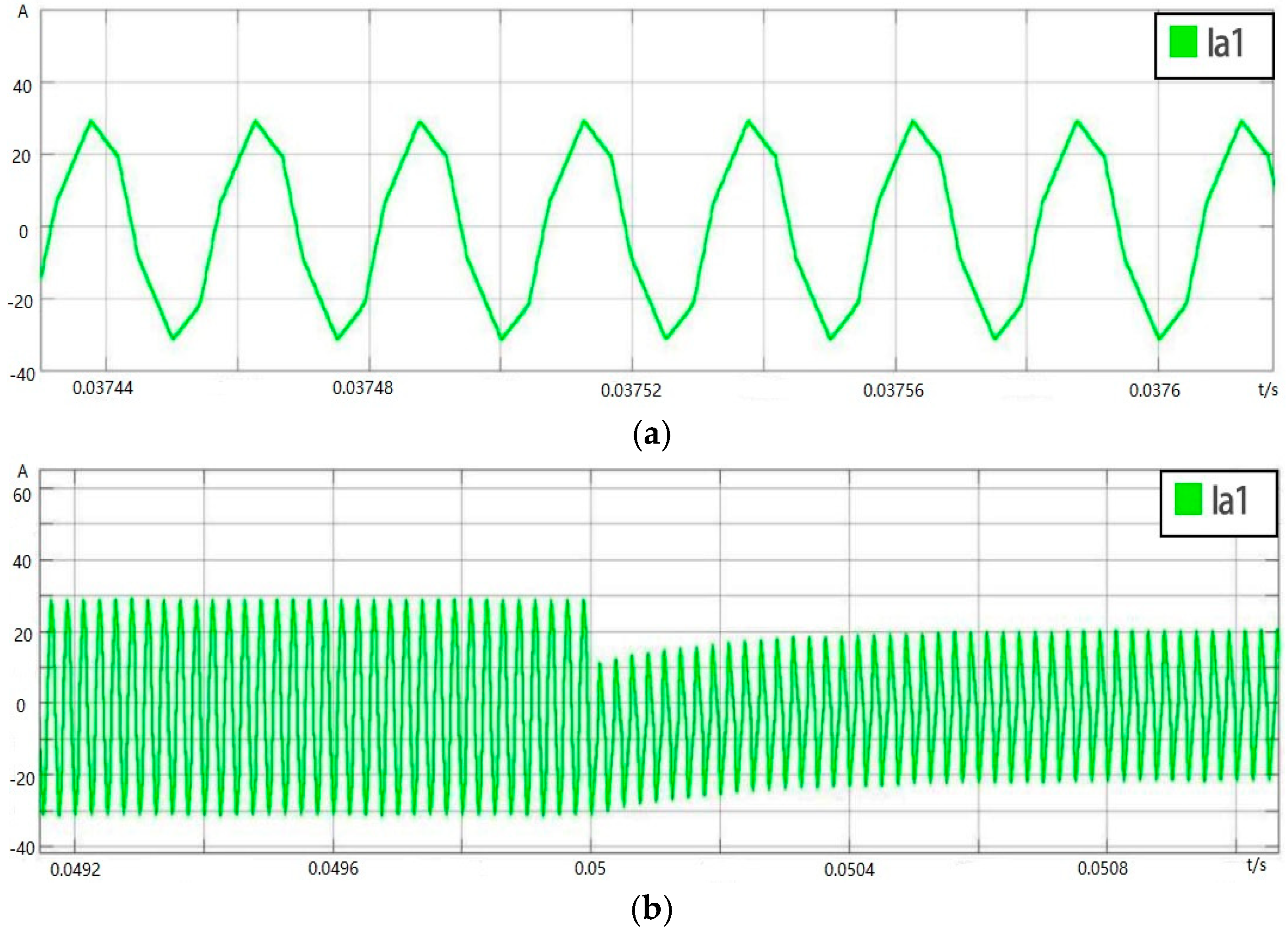
Figure 19b,c, it is can been seen that the inductance current can charge and discharge following the control logic signal under the optimization methods. The power transmission can be achieved according to
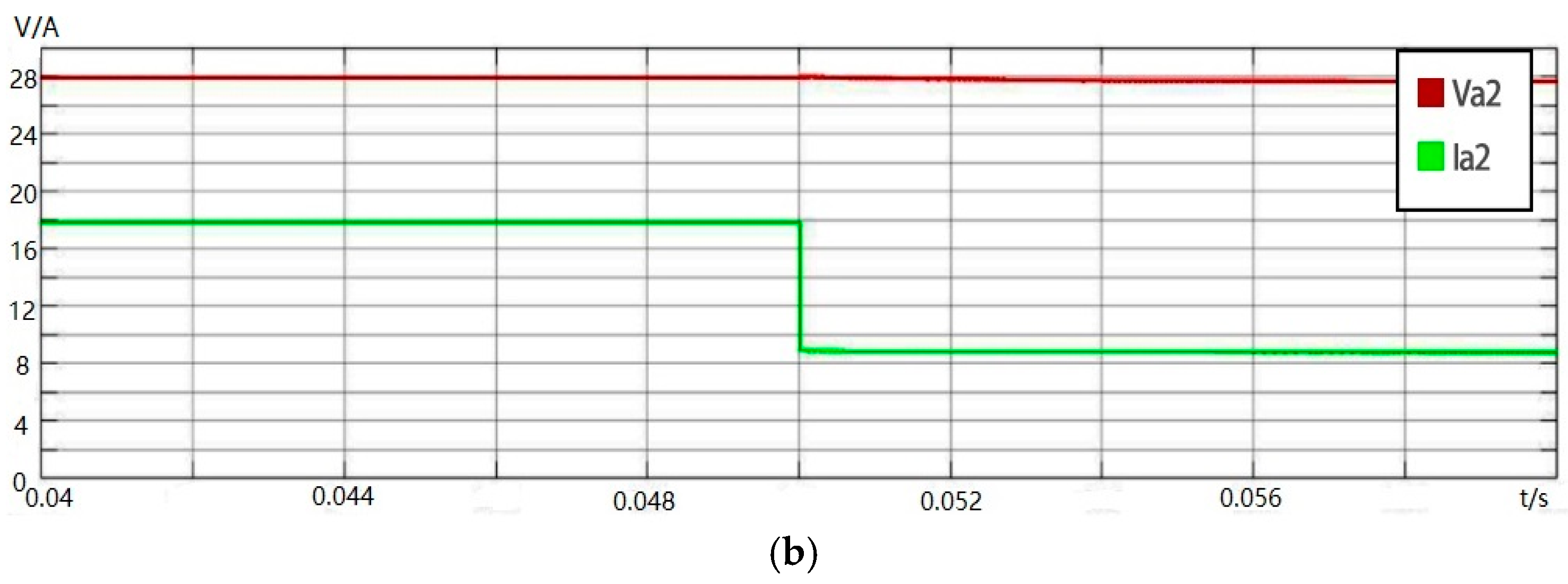
Figure 19c. When the input voltage is 273 V, the output voltage is 27.9 V. In order to verify the transient ability of the control algorithm, the transient load variation was carried out, with the experimental results shown in
Figure 19d, and the output voltage can be quickly kept at reference voltage of 28 V.
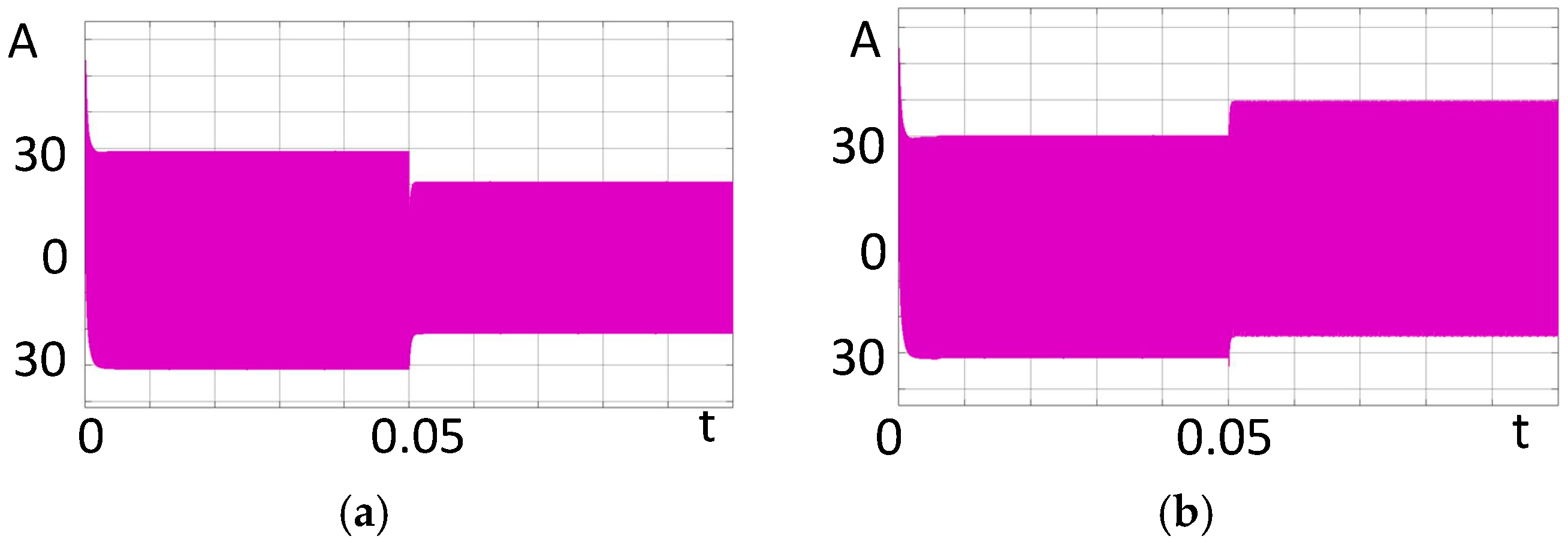
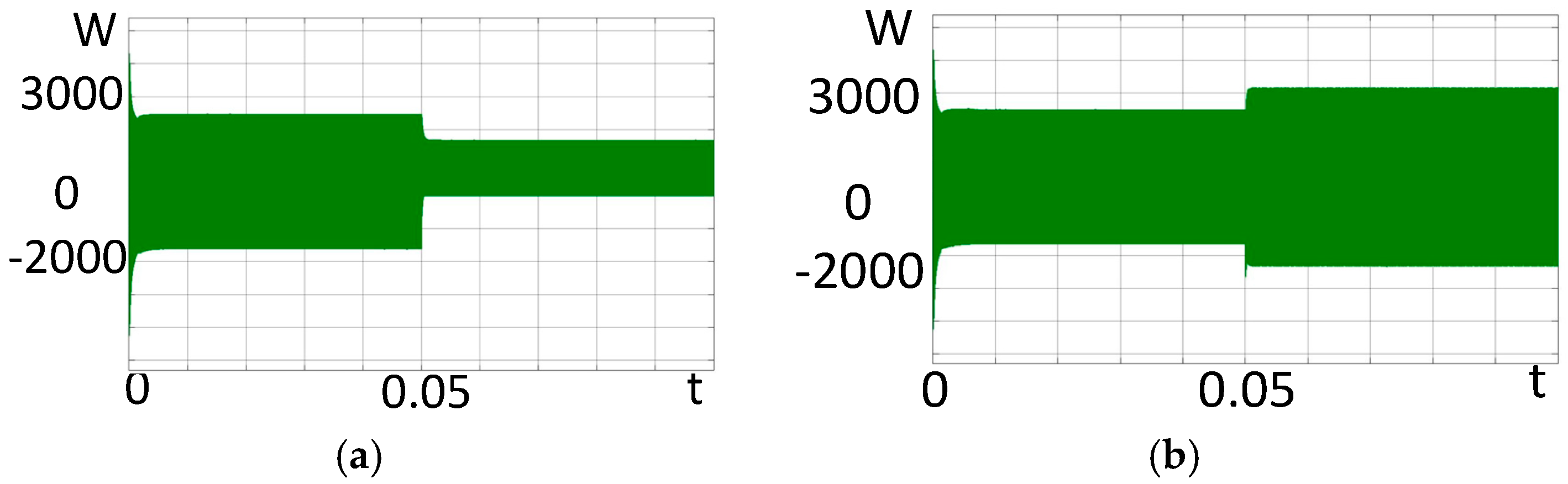
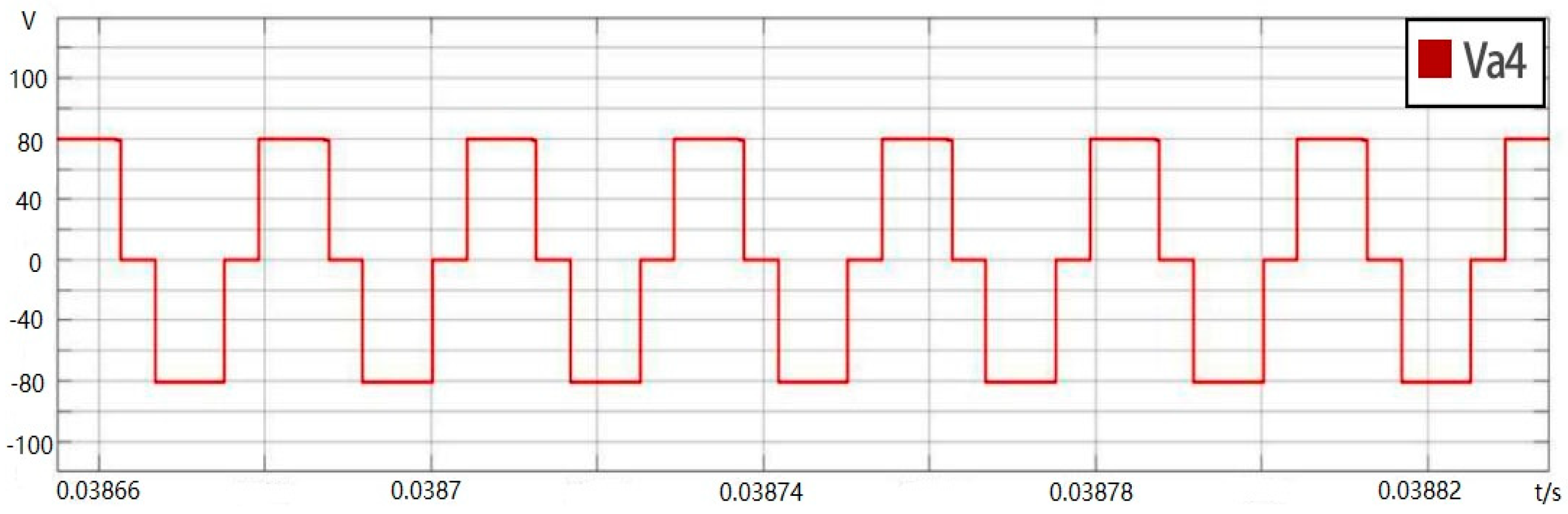
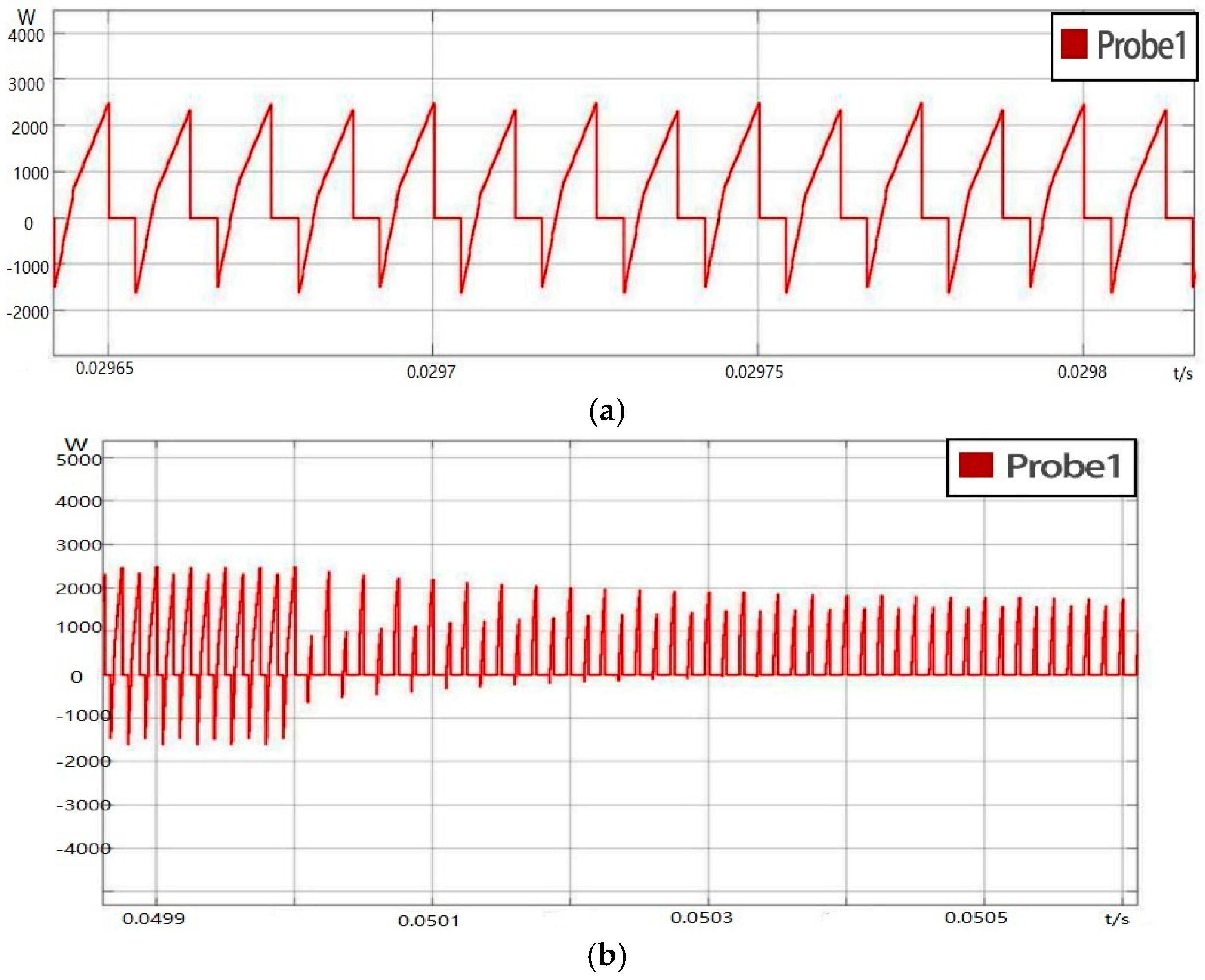
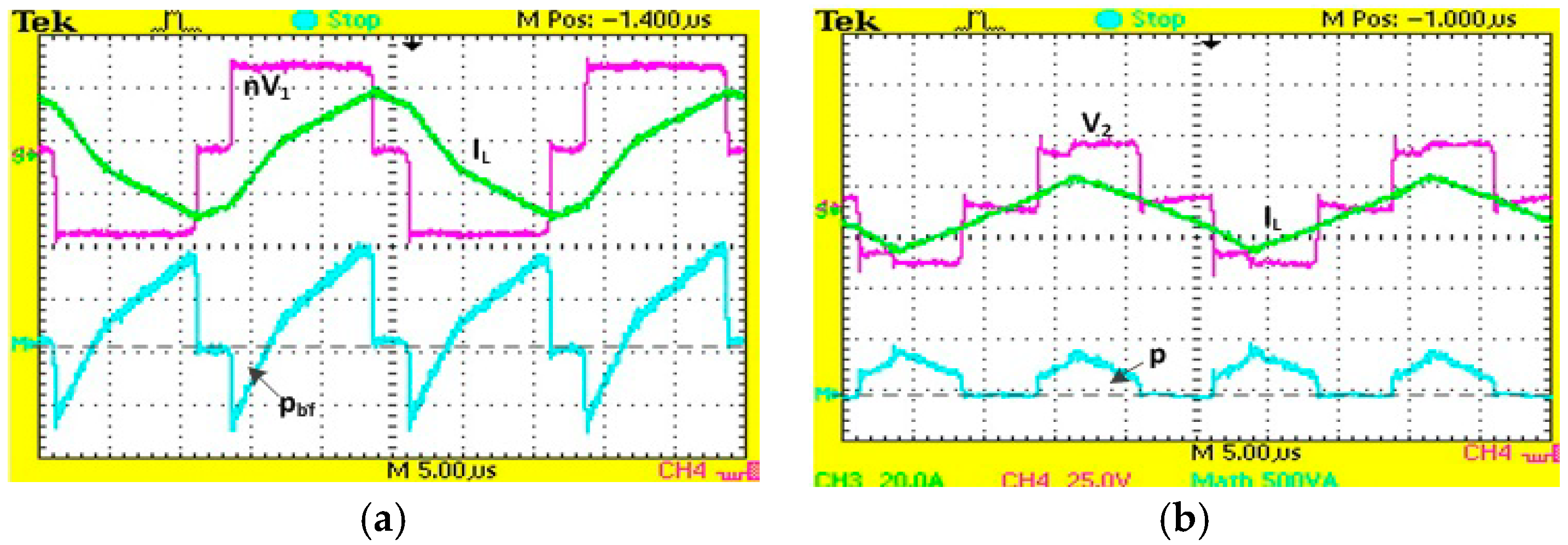
In order to verify the capability of the proposed method to decrease the reverse negative power transmission, a comparative experiment was carried out under the two control methods, for the traditional double phase shift and the proposed method, respectively. It can be seen from
Figure 20 that the reverse negative power can be greatly reduced. It is verified that the proposed methods are valid and reliable enough for use in the DAB converter in an aircraft electric power system background.
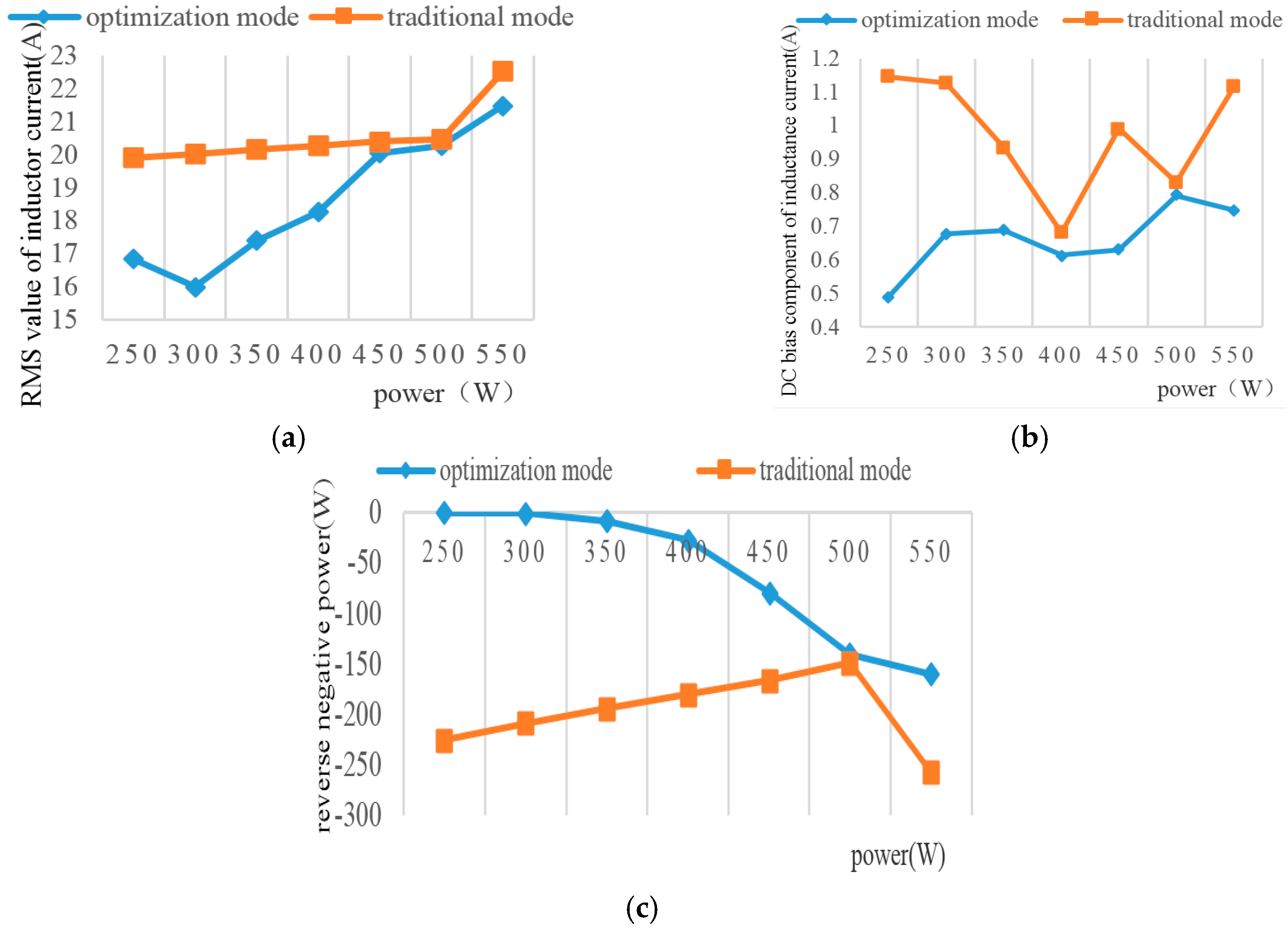
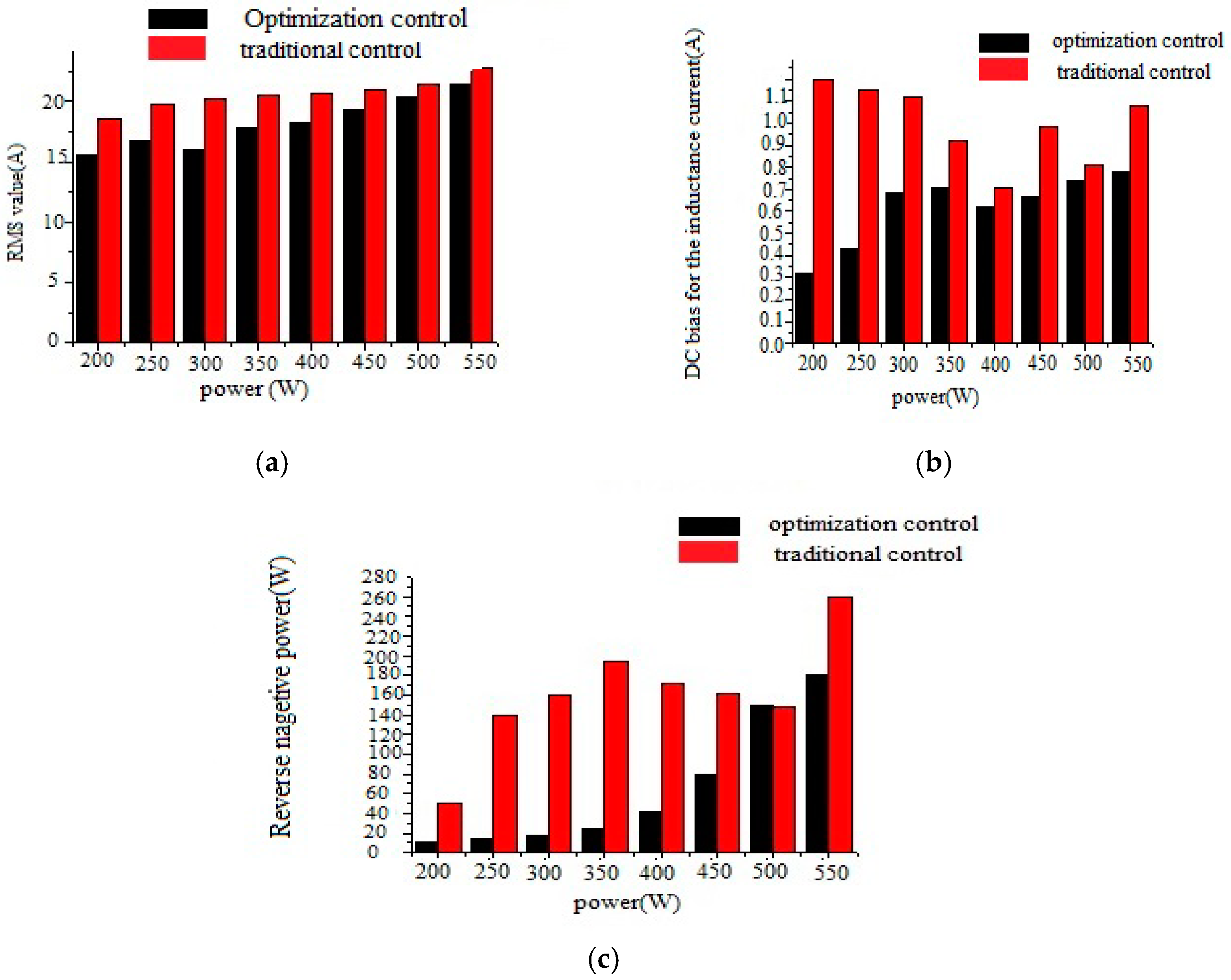
According to the different performance index testing methods, the aerospace DAB converter’s experimental result comparison under different control methods can be showed in
Figure 21. From
Figure 21, the DAB converter’s performance features such as the inductance current RMS can be minimized based on the optimization control method. The DC-bias current for the high frequency transformer can be suppressed greatly to avoid the saturation of the iron core of the transformer. The reverse negative power was also greatly reduced based on the optimization control methods, which can improve the efficiency of DAB converter. The experimental result can match the result from the simulation result.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}