A High-Efficiency Charging Service System for Plug-in Electric Vehicles Considering the Capacity Constraint of the Distribution Network

Abstract
:1. Introduction
2. System Framework
2.1. Assumption
2.2. Distributed Design
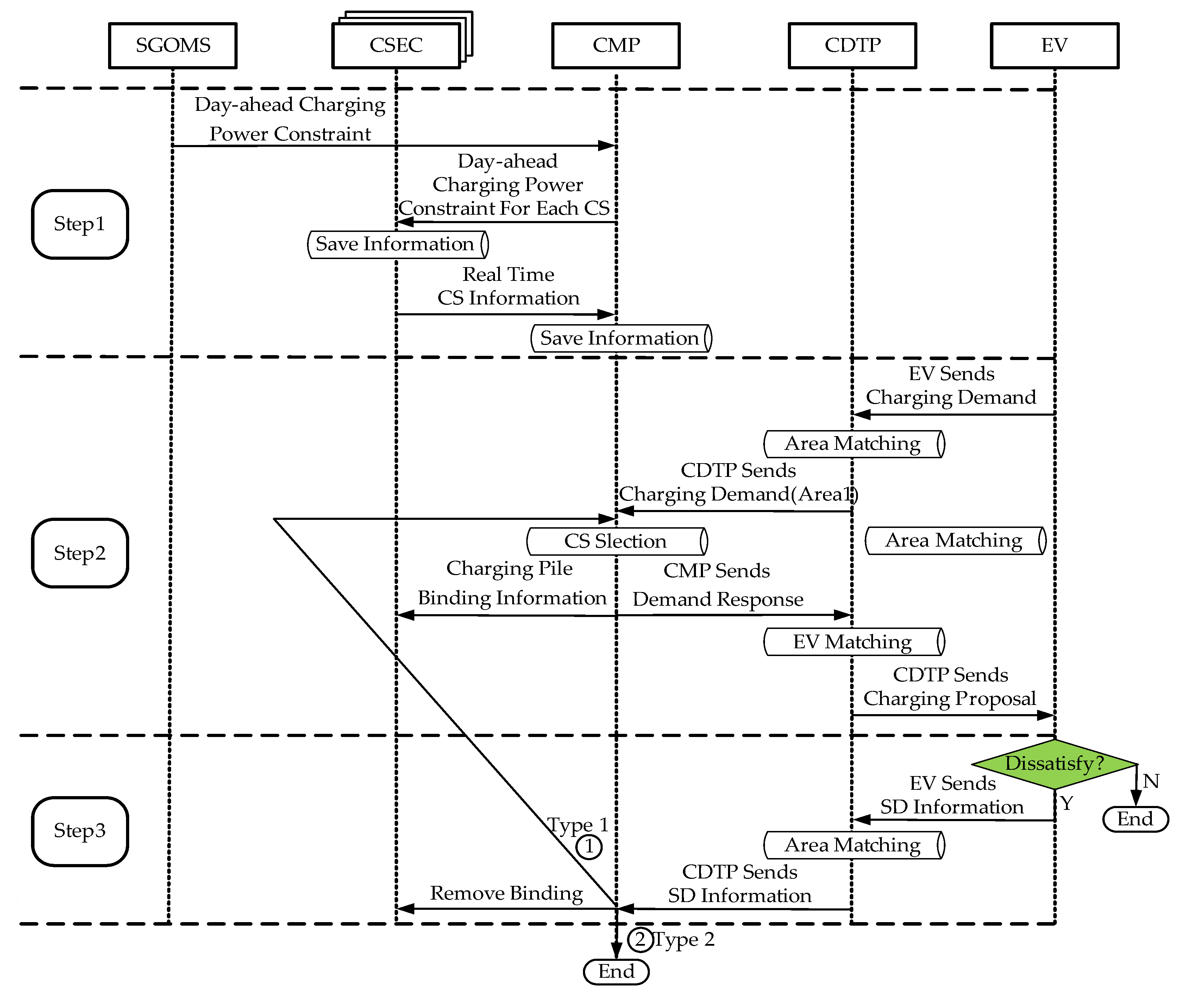
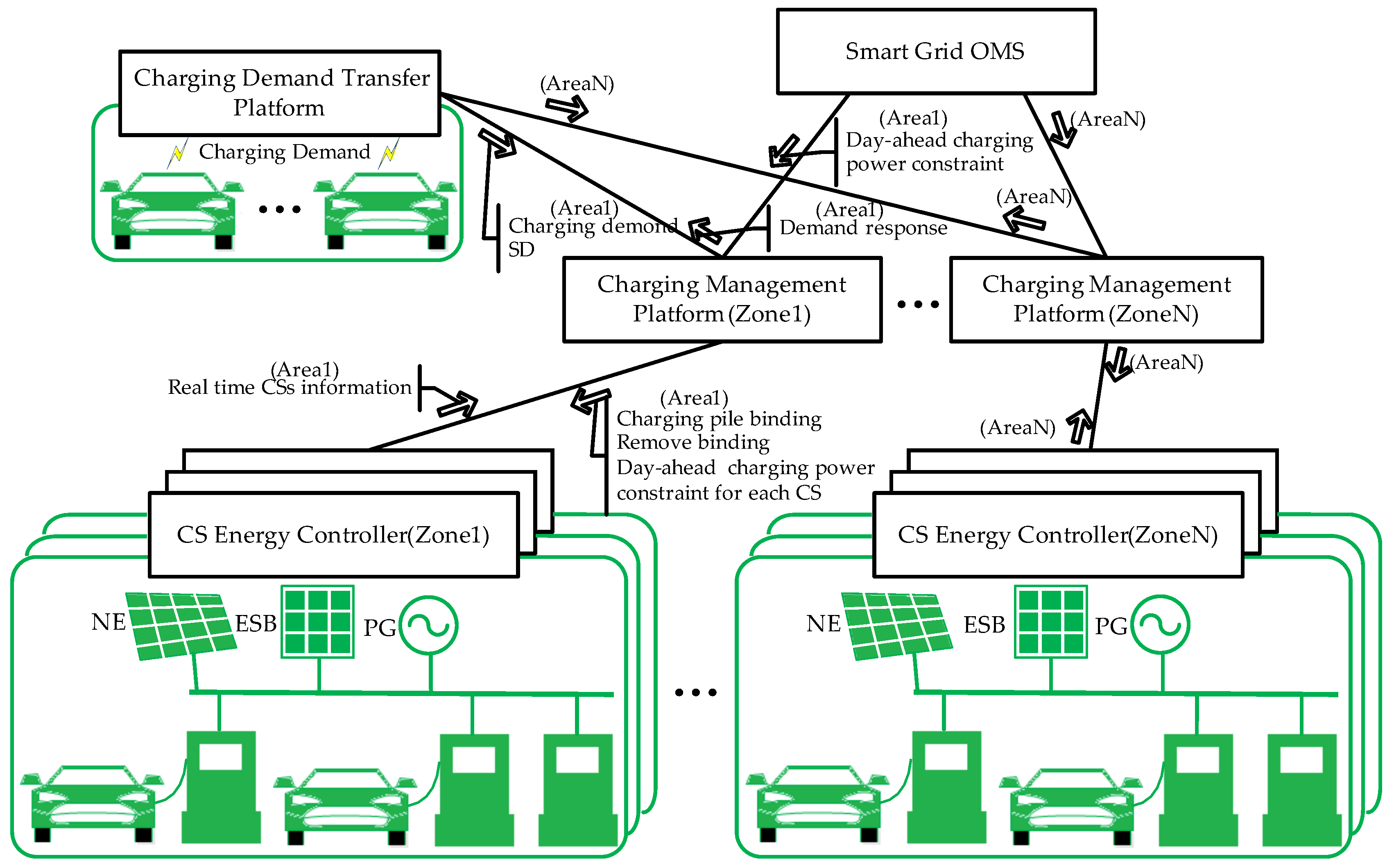
2.3. Communication Framework
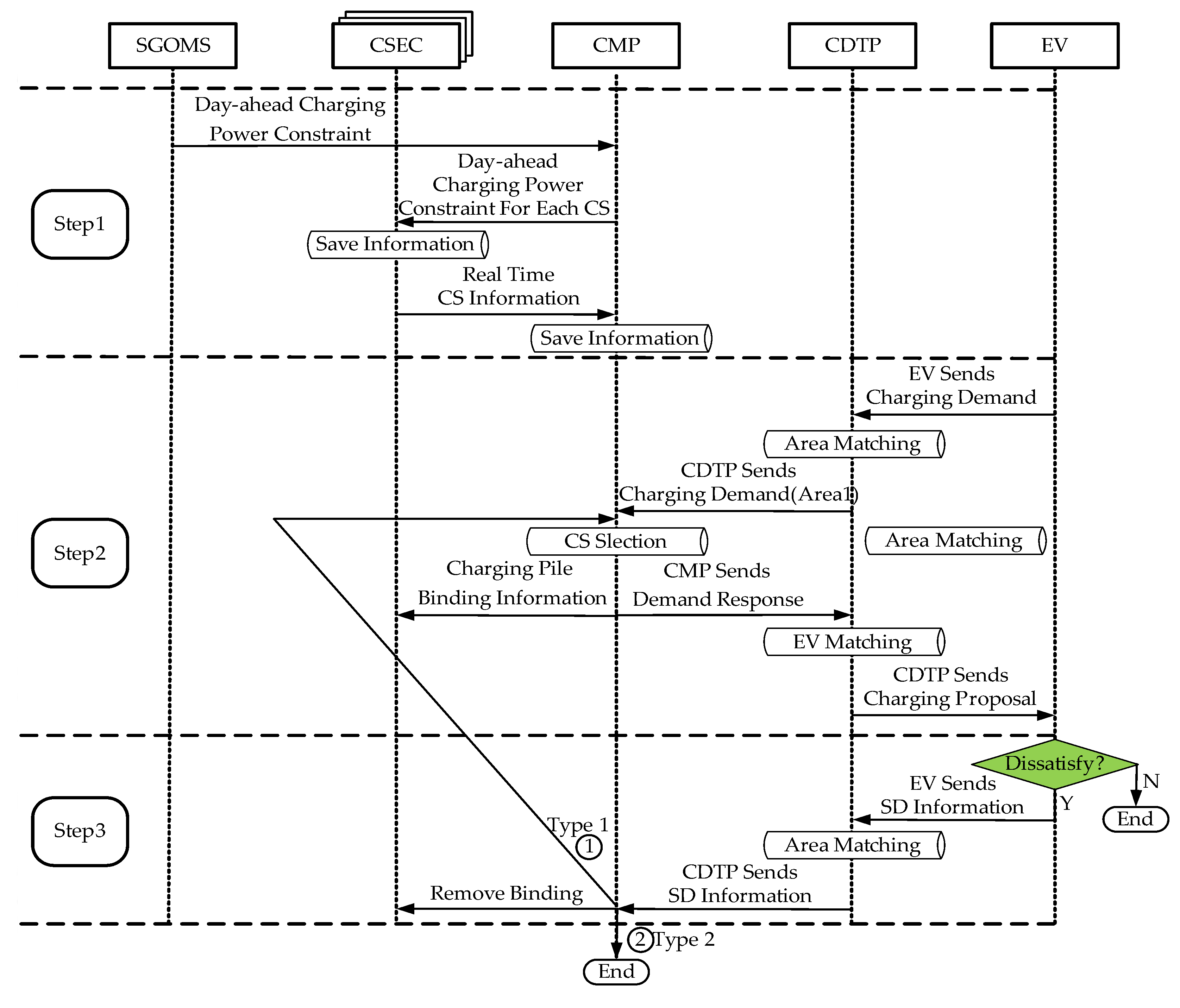
- Step 1: the SGOMS sends the day-ahead charging power constraint of the area which the CMP is responsible for to the CMP. Then, the CMP transforms the information to the day-ahead charging power constraints for each CS around responsibility and sends the information to the corresponding CSEC in an end-to-end manner. The CSEC saves the information. As the status of the CSs is influenced by the random access, or departure, of EVs, the status information of CSs also changes at random. Therefore, to reduce the influences of such randomness on CMP computations, the CSEC will periodically send real-time CS information to the CMP. After receiving the information, the CMP saves it to its database.
- Step 2: the EV owner applies for a charging reservation to the CDTP which performs area matching for the reservation information and transmits the charging demand to the CMP which is responsible for the charging service of the area within which the EV is located. The CMP selects a CS and then sends the selection result as the demand response to the CDTP which transmits the information to the EV owner. After receiving the response, the EV owner can choose to go to the recommended CS for charging according to the response information and then the service ends or chooses to reject the recommendation or cancel it en route. In case of the latter, it turns to Step 3: in addition, to guarantee that the EV can be successfully charged after arriving at the recommended CS, the CMP sends the charging pile binding information to the CSEC in charge of the recommended CS while sending the charging proposal. The CSEC binds the assigned charging pile after receiving the instruction. It is worth noting that, once a charging pile is bound, it only provides service to the assigned EV until such binding is removed.
- Step 3: the EV owner sends the SD information to the CDTP which transmits that information to the CMP. Here, the SD information can be divided into two types: instructions 1 and 2 which correspond to the two selections of the EV owner: needing the system to find another CS or no longer needing service from the system. On receiving instruction 1, the CMP turns to the CS selection link in Step 2 and fulfils the residual links of Step 2. On receiving instruction 2, the CMP immediately stops providing service to the EV owner. No matter which instruction the CMP receives, it will send that instruction to the CSEC responsible for the recommended CS to remove the binding. After receiving the instruction, the CSEC immediately removes the binding of the assigned charging pile, so that the charging pile can be used by another EV.
3. Problem Formulation
3.1. Charging Reservation Rules
- Rule 1: the EV owner is expected to accomplish the second operation (making decisions) in a contracted response time, the starting moment of which is the moment when the EV owner receives the charging demand response. If the operation time exceeds the response time, the vehicle intelligent terminal (VIT) will automatically send the SD information containing instruction 2 to the system to terminate the charging service.
- Rule 2: on the condition that Rule 1 is not broken, the EV owner needs to arrive at the assigned charging pile to charge within the contracted time Tcon. The EV owner is aware of the time before the reservation and Tcon starts from the time when the EV owner receives the charging demand response. If the EV is not charged by the charging pile within Tcon, the binding on the charging pile is removed.
3.2. Optimal Charging Demand Model of EVs
3.3. Three-Level CS Selection Model
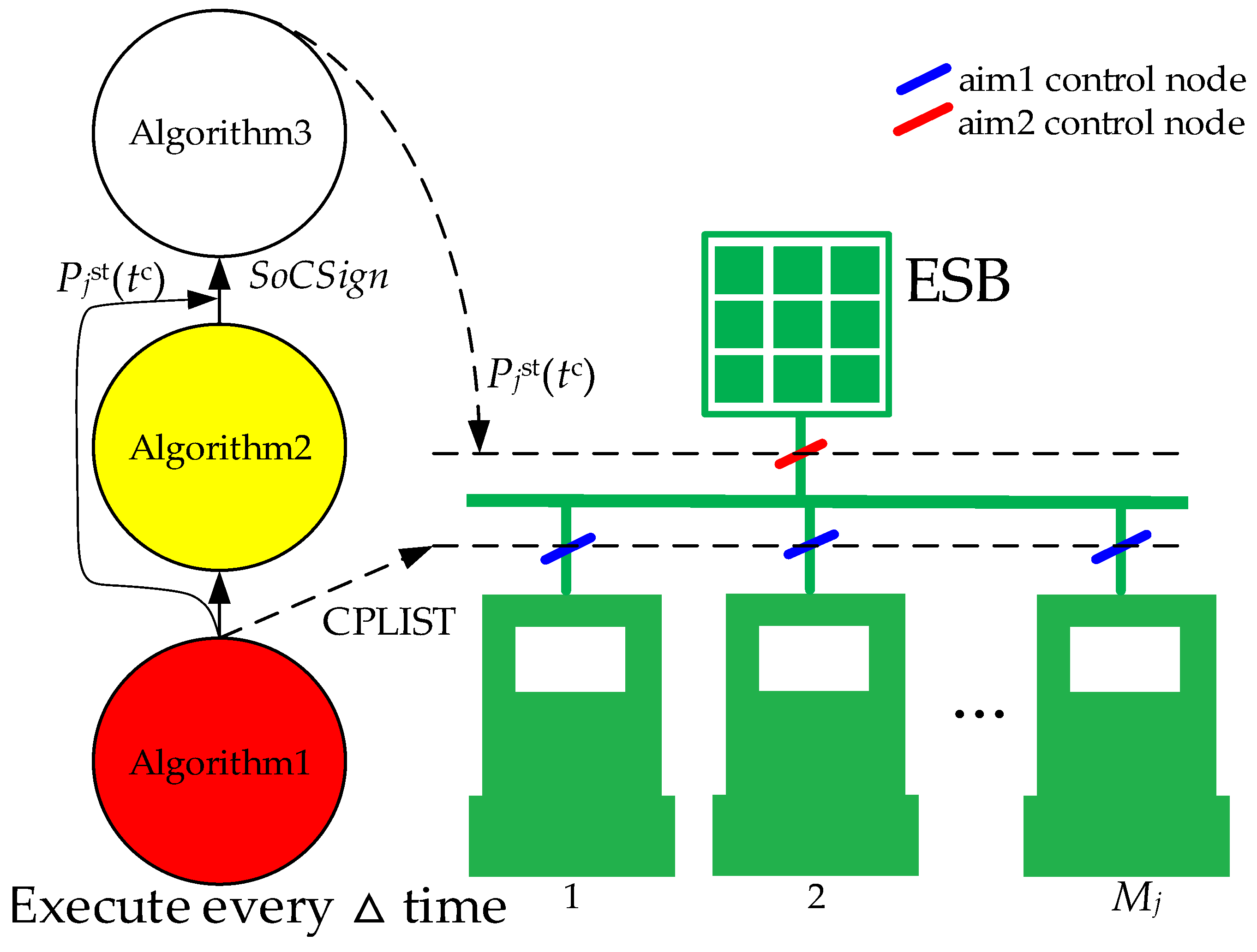
3.4. CSECA
3.4.1. Aim 1: Guarantee Charging Power Constraint of the CS
3.4.2. Aim 2: Ensure the Optimal Charging Power at the CS
| Algorithm 1. Calculate charging pile output power constraint | |
| 1:for(;;) do 2:Markvin = Mark(VINLIST) 3.tc = Tsys + Δ 4:Pjst(tc) = PjCSL(tc) − PjNE(tc) − Pjgrid(tc) 5:if Pjst(tc) > Pjs+ then 6: delt = Pjst(tc) − Pjs+ 7: Pjst(tc) = Pjs+ 8:end if 9:SoCj(tc) = SoCj(Tsys) − Pjs(Tsys)/60/ESj × 100 10:calculate SoCj(tc + Δ) = SoCj(tc) − Pjs(tc)/60/ESj × 100 11:if SoCj(Tsys + 2 Δ) ≤ SoCj− then 12: Psmax = (SoCj(Tsys + Δ) − SoCj-) × 60 × ESj/100 13: Tdelt = delt + Pjs(tc)−Psmax 14: for(l = 1;l < Mj;l++)do 15: if(VINl = Markvin)&&(εl! = 0)then | 16: εl = 0 17: if Tdelt < PlCP then 18: Plreal = PlCP − Tdelt 19: else then 20: Plreal = 0 21: break 22 add Plreal in CPLIST 23: end if 24 end if 25: end for 26:else 27: break 28:end if 29:end for 30:return Pjst(tc) and CPLIST |
| Algorithm 2. Judge the SoCSign | |
| 1: SoCj− = SoC jIni 2:for(n = Tsys;n< Tdmax;n++) do 3: calculate PjCSL(n) 4:end for 5:for(n = Tsys;n < Tdmax;n++) do 6: Pjst(n) = PjCSL(n) − PjNE(n) − Pjgrid(n) 7: if (Pjst(n) > Pjs+)||(Pjst(n) < Pjs−) then 8: if Pjst(n) < 0 then 9: Pjst(n) = Pjs− 10: else then 11: Pjst(n) = Pjs+ 12: end if 13: end if 14:end for | 15:for(n = Tsys;n < Tdmax−1;n++) do 16: SoCj(n + 1) = SoCj(n) − Pjs(n)/60/ESj × 100 17: if (SoCj(n + 1) > SoCj+) then 18: SoCj(n + 1) = SoCj+ 19: end if 20:end for 21:if (SoCj(Tdmax) ≤ SoCj−)||(SoCj(Tsys) ≤ SoCj−) then 22: SoCSign = 1 23: SoCj− = MidSoC 24:else then 25: SoCSign = 0 26: SoCj− = SoCIni 27:end if 28:return SoCSign |
| Algorithm 3. Calculate the power output of the ESB | |
| 1:if Pjst(tc) < Pjs− then 2: Pjst(tc) = Pjs− 3: if SoCSign == 1 then 4: SoCj(tc) = SoCj(Tsys) − Pjst(Tsys) × Δ/60/ESj × 100 5: SoCj(tc + Δ) = SoCj(tc) − Pjst(tc)/60/ESj × 100 6: if SoCj(tc + Δ) > SoCj+ then | 7: Pjst(tc) = (SoCj(tc)−SoCj+) × ESj × 60/100/△ 8: end if 9: SoCSign = 0 10: end if 11:end if 12:return Pjst(tc) |
4. Case Studies
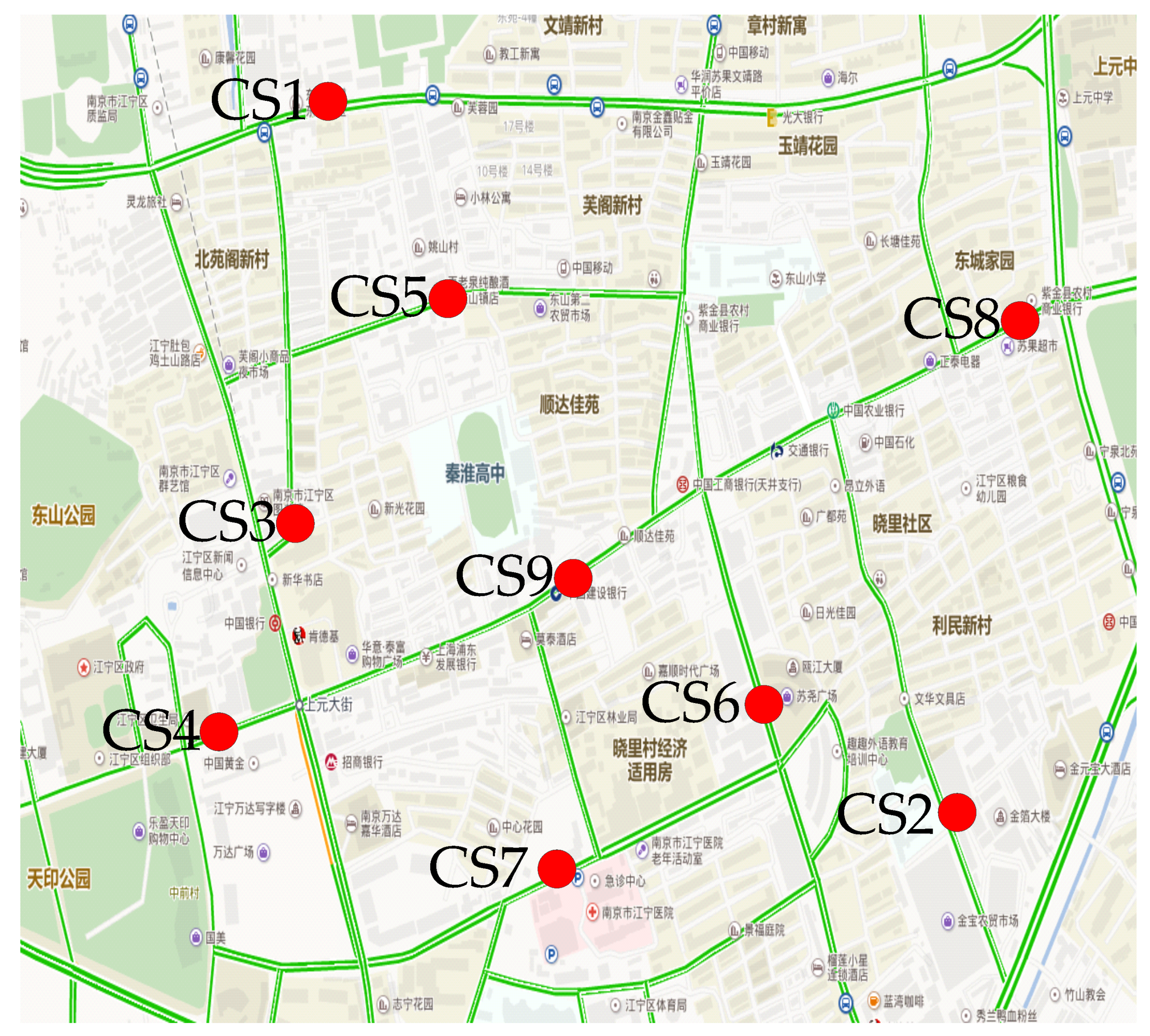
4.1. Simulation Environment
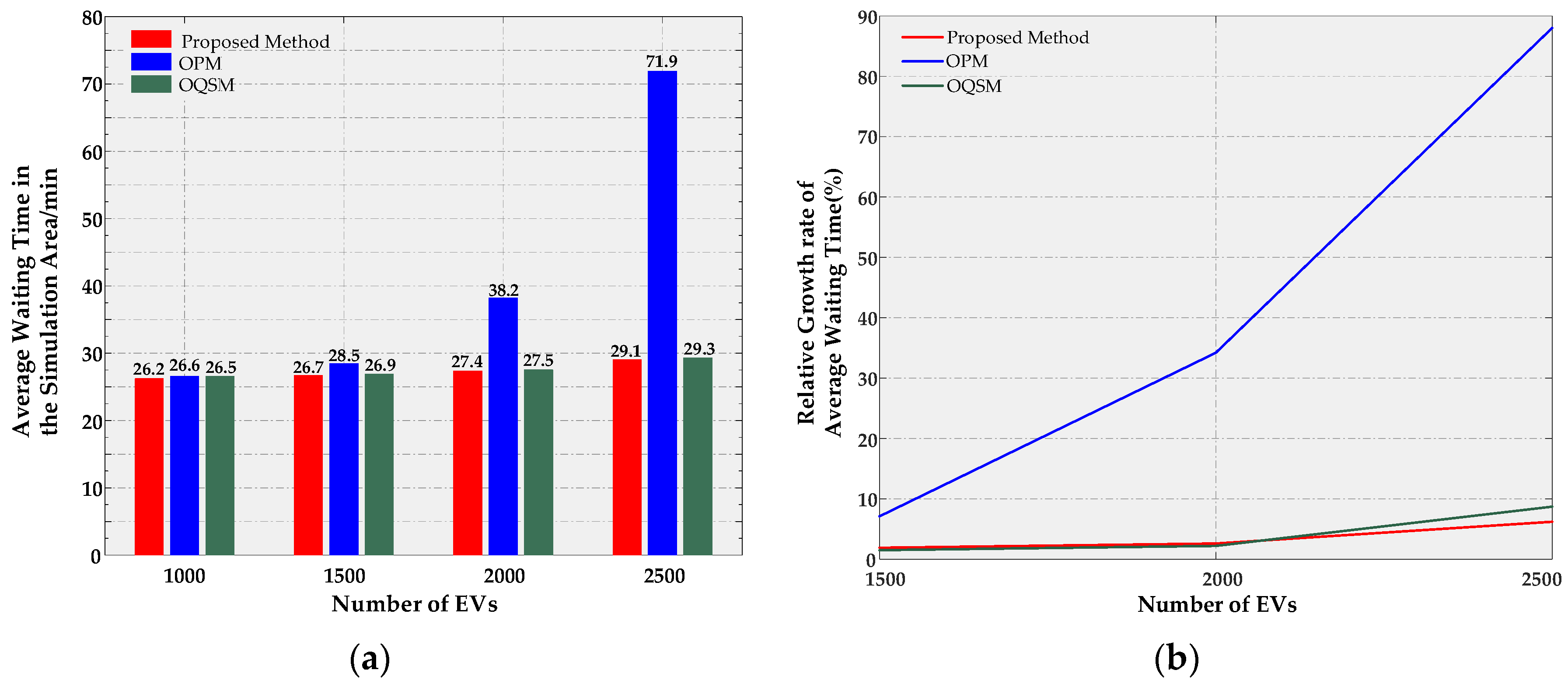
4.2. Scenario A and Simulation Results
4.2.1. Introduction of Scenario A
- (1)
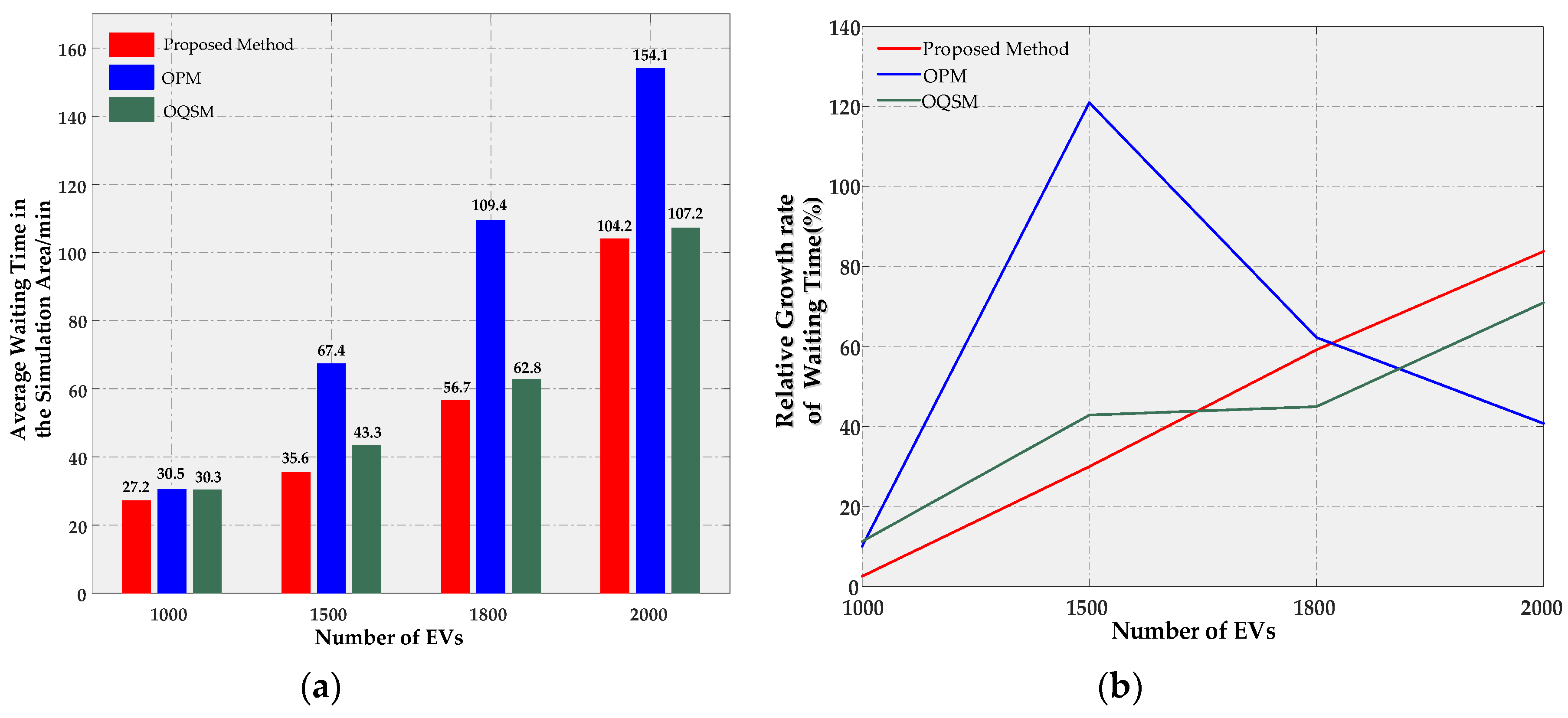
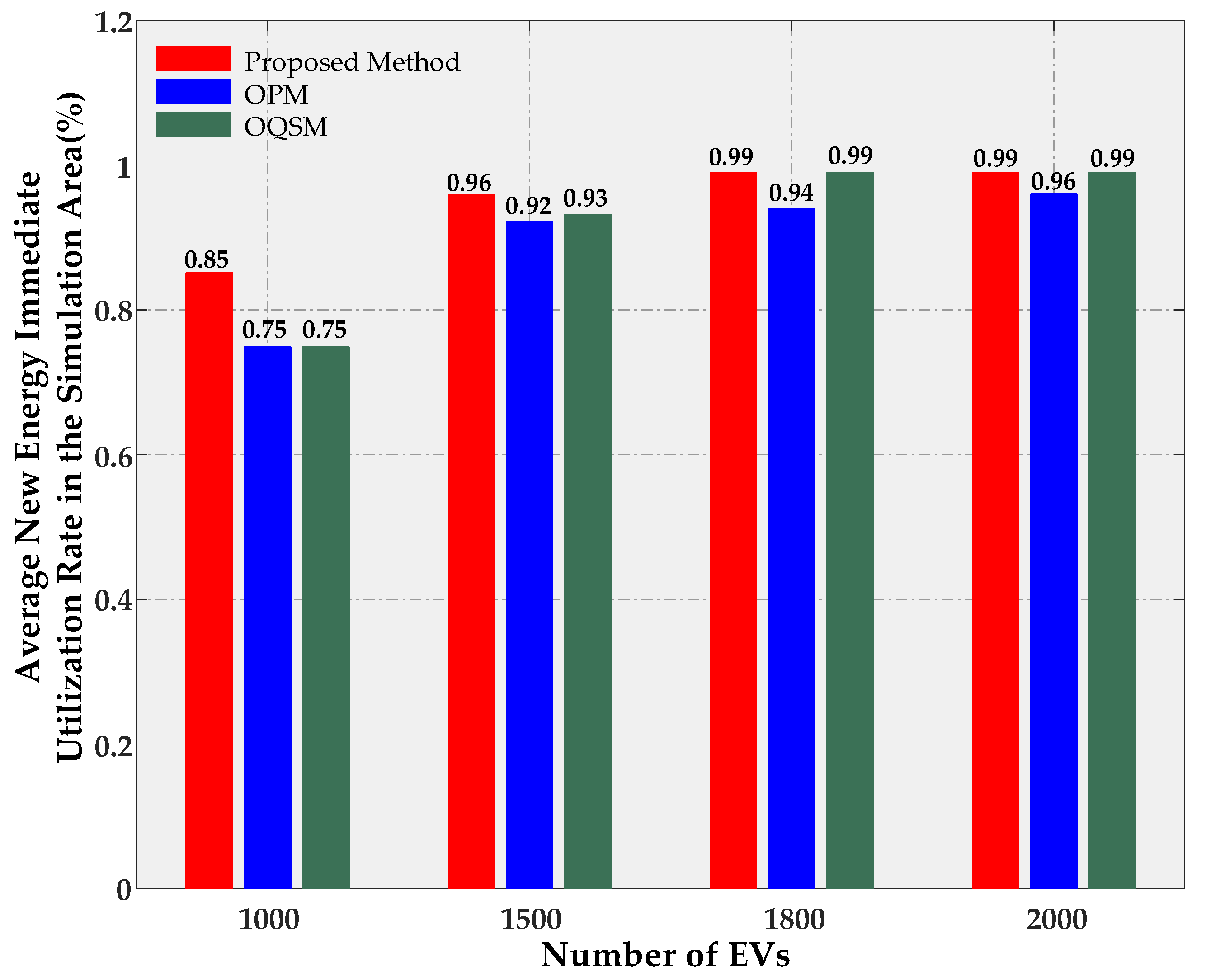
- Optimal path method (OPM): the EV owners select a CS in Dimax with the shortest travel time by comprehensively considering the distance and the travel time to the CSs.
- (2)
- Optimal queue size method (OQSM): the EV owners select a CS in Dimax with the smallest queue size by comprehensively considering the distance to the CSs and the queue sizes at each CS.
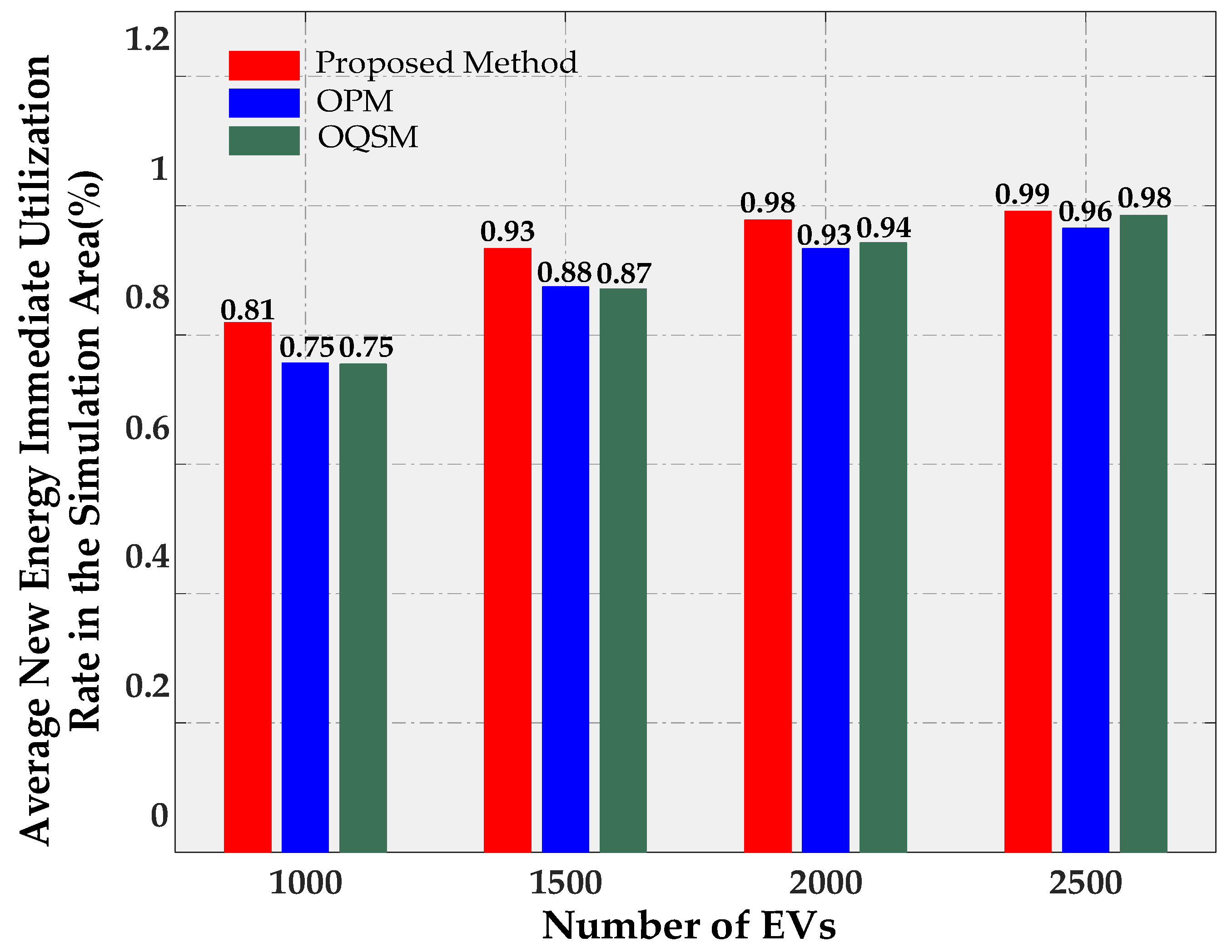
4.2.2. Simulation Results
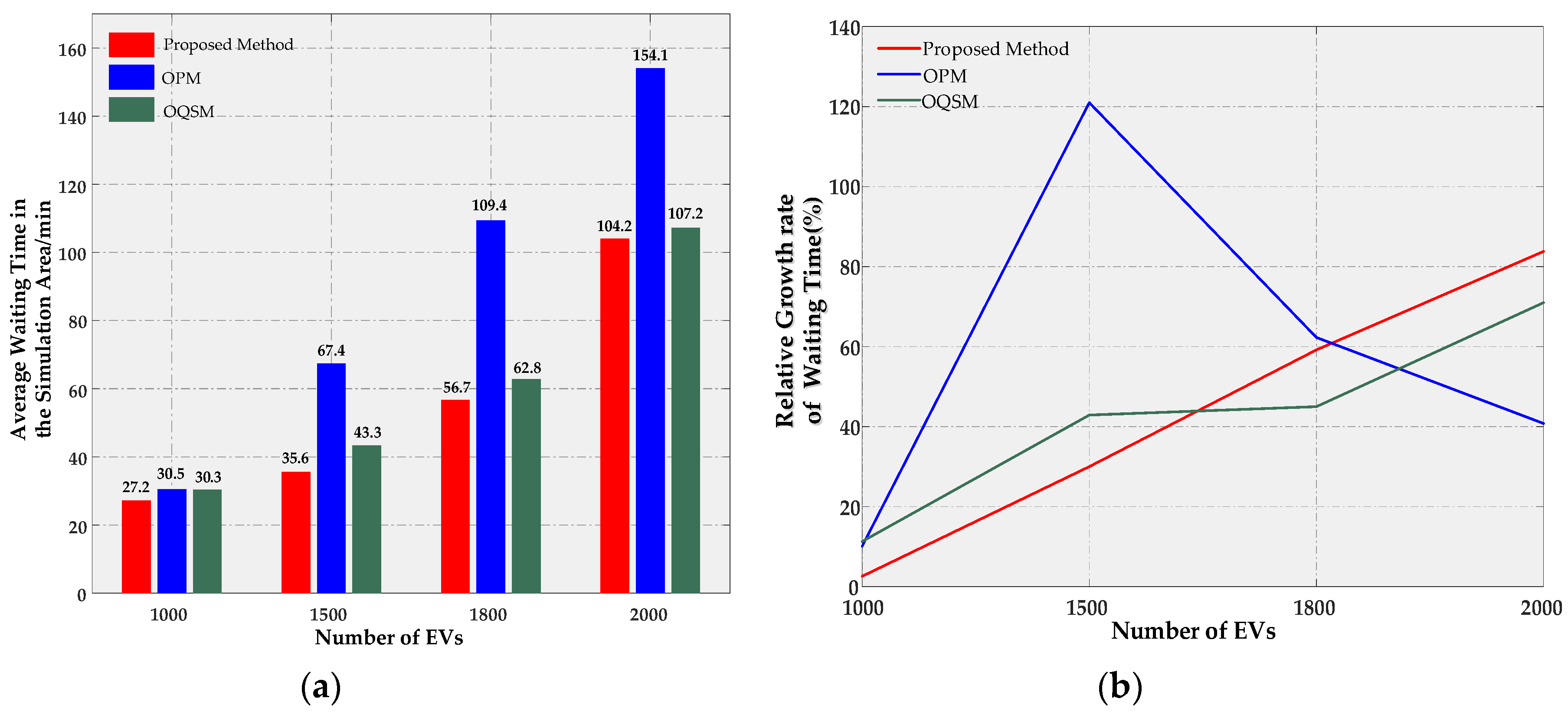
4.3. Scenario B and Simulation Result
4.3.1. Introduction of Scenario B
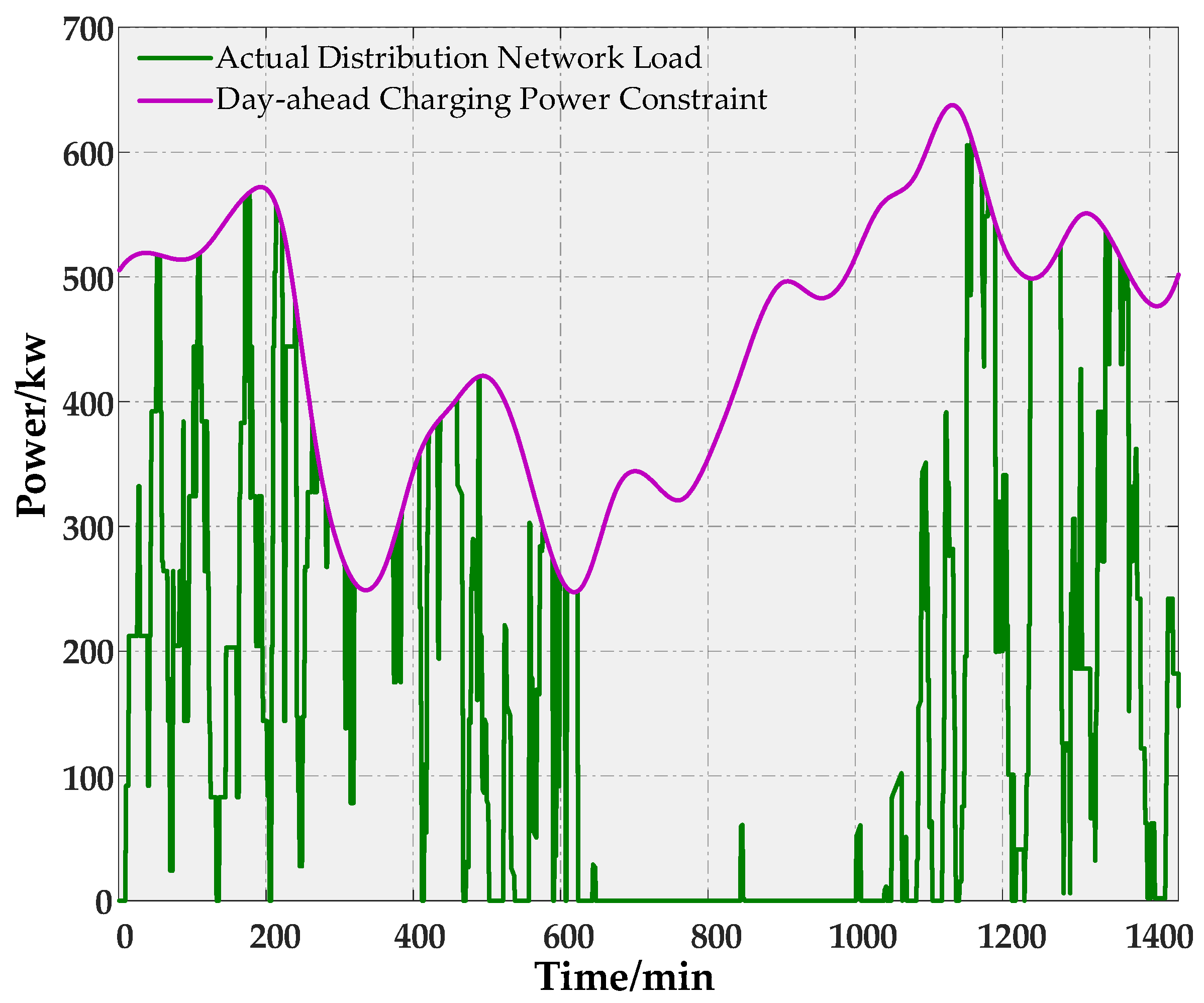
4.3.2. Simulation Results
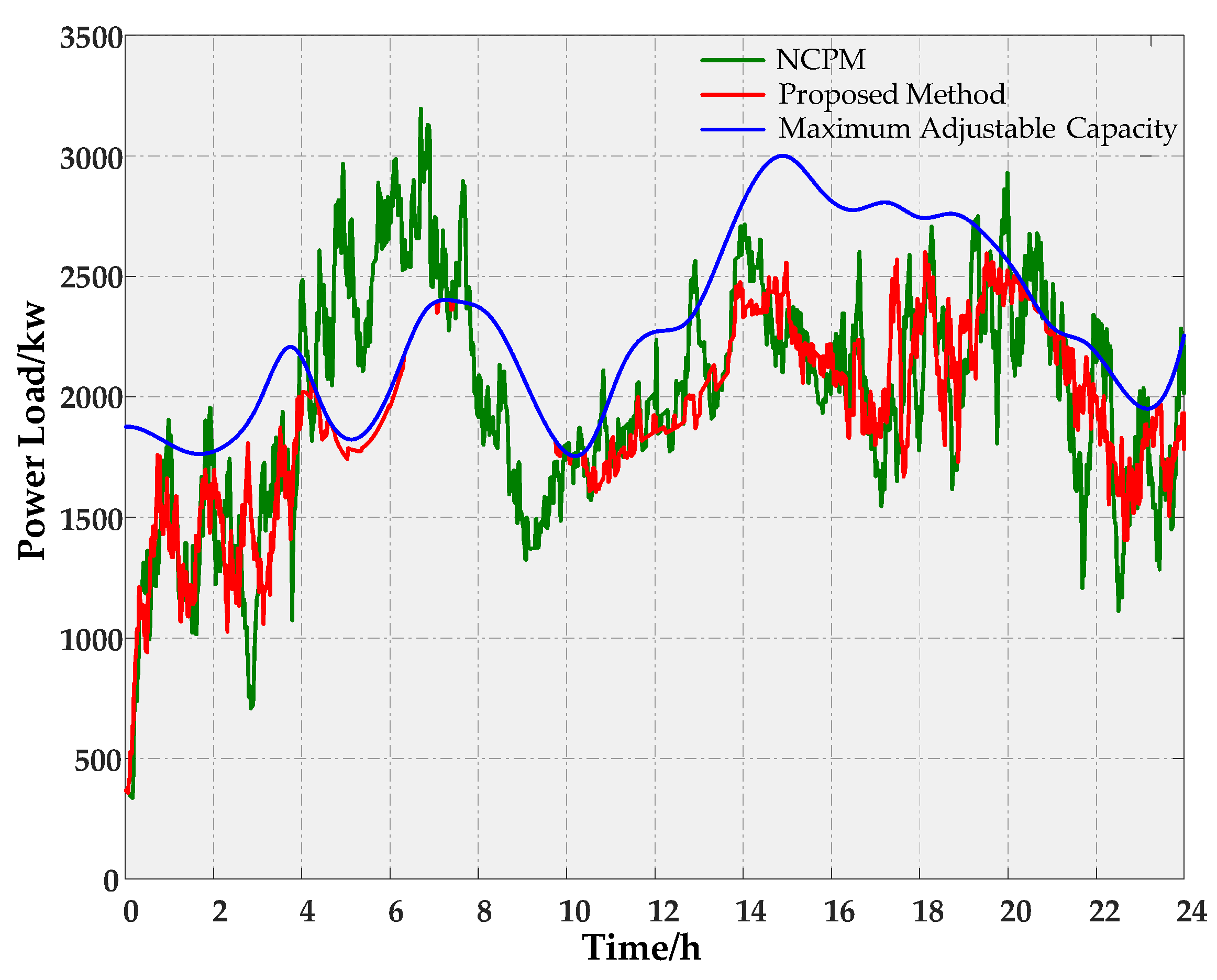
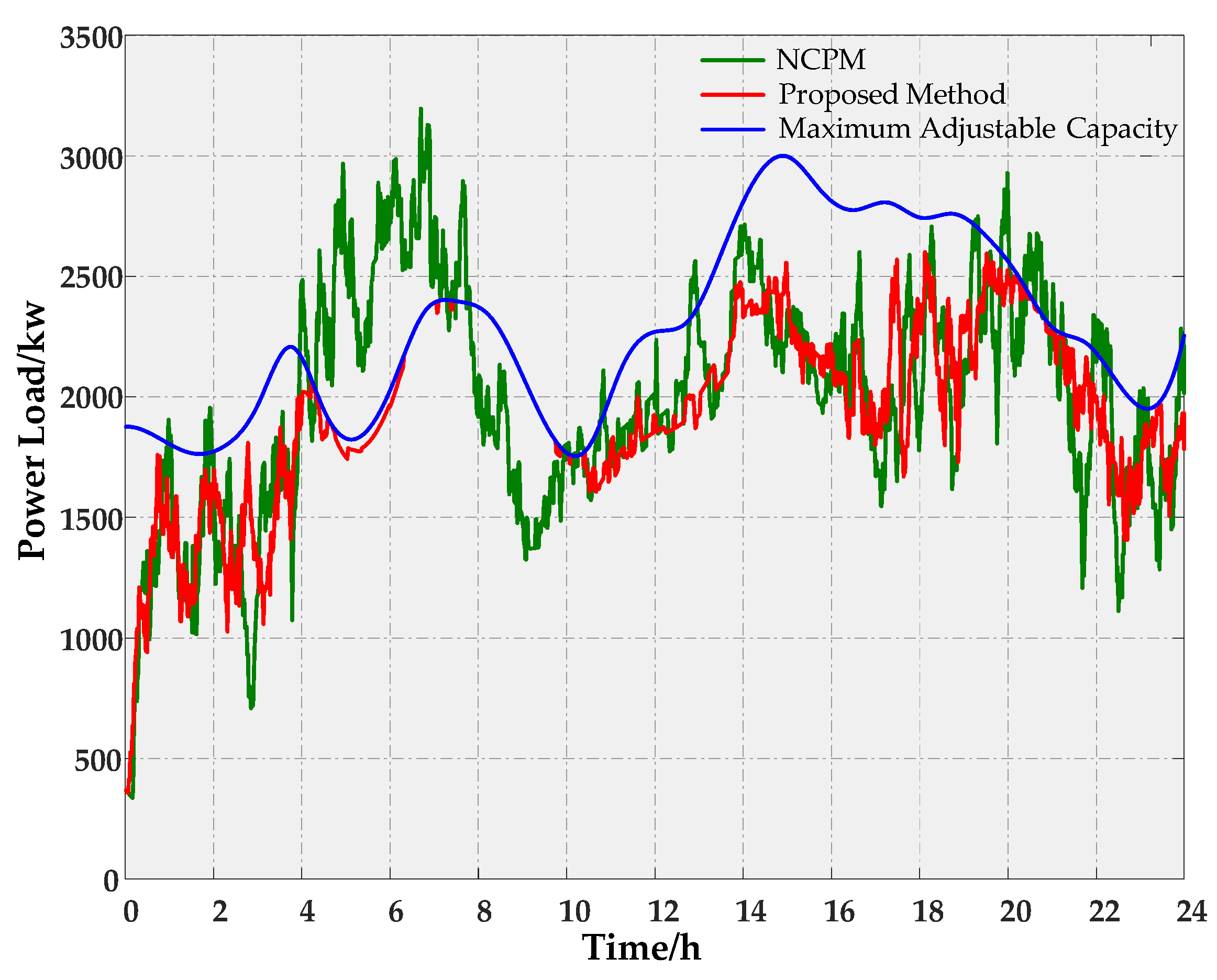
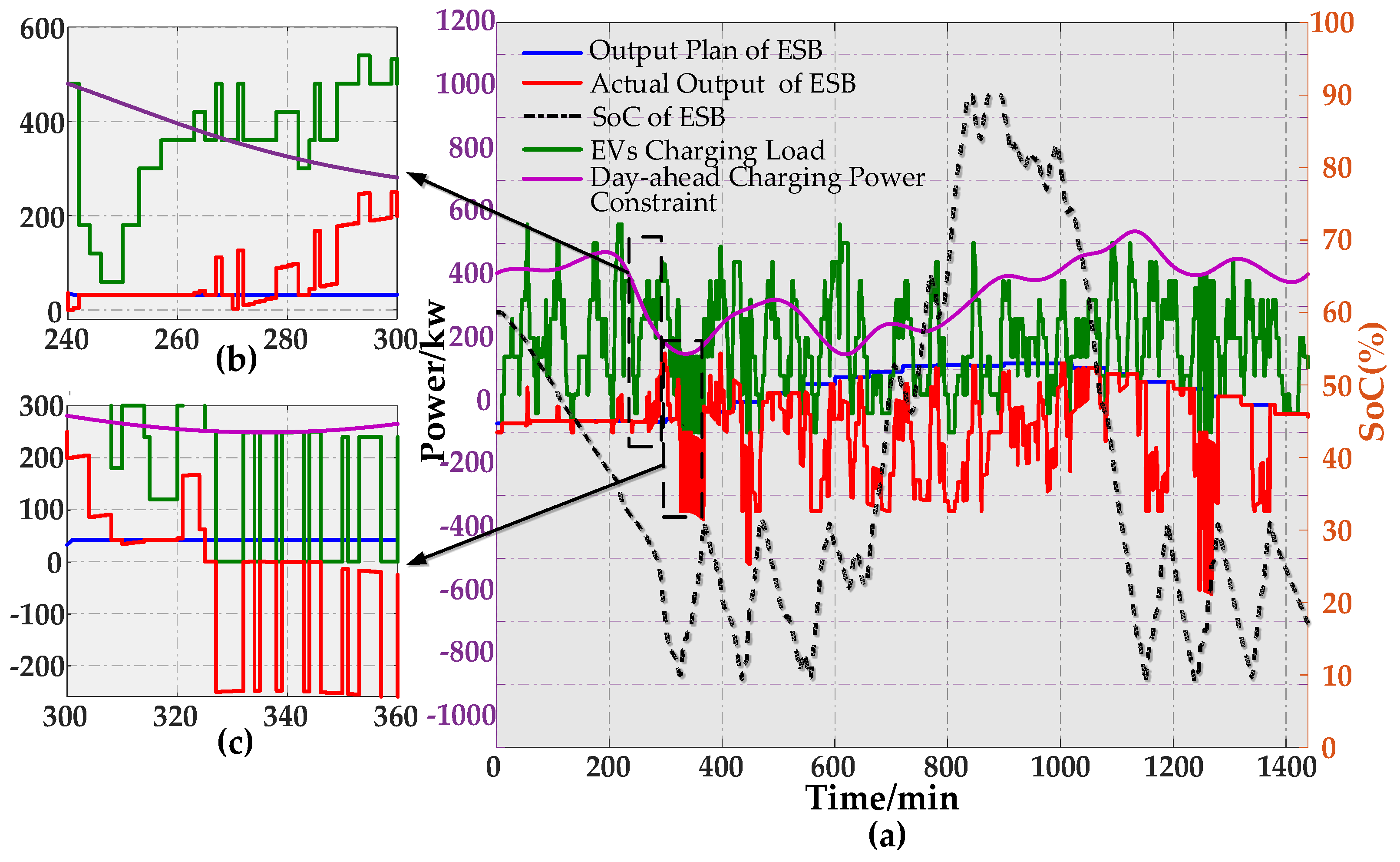
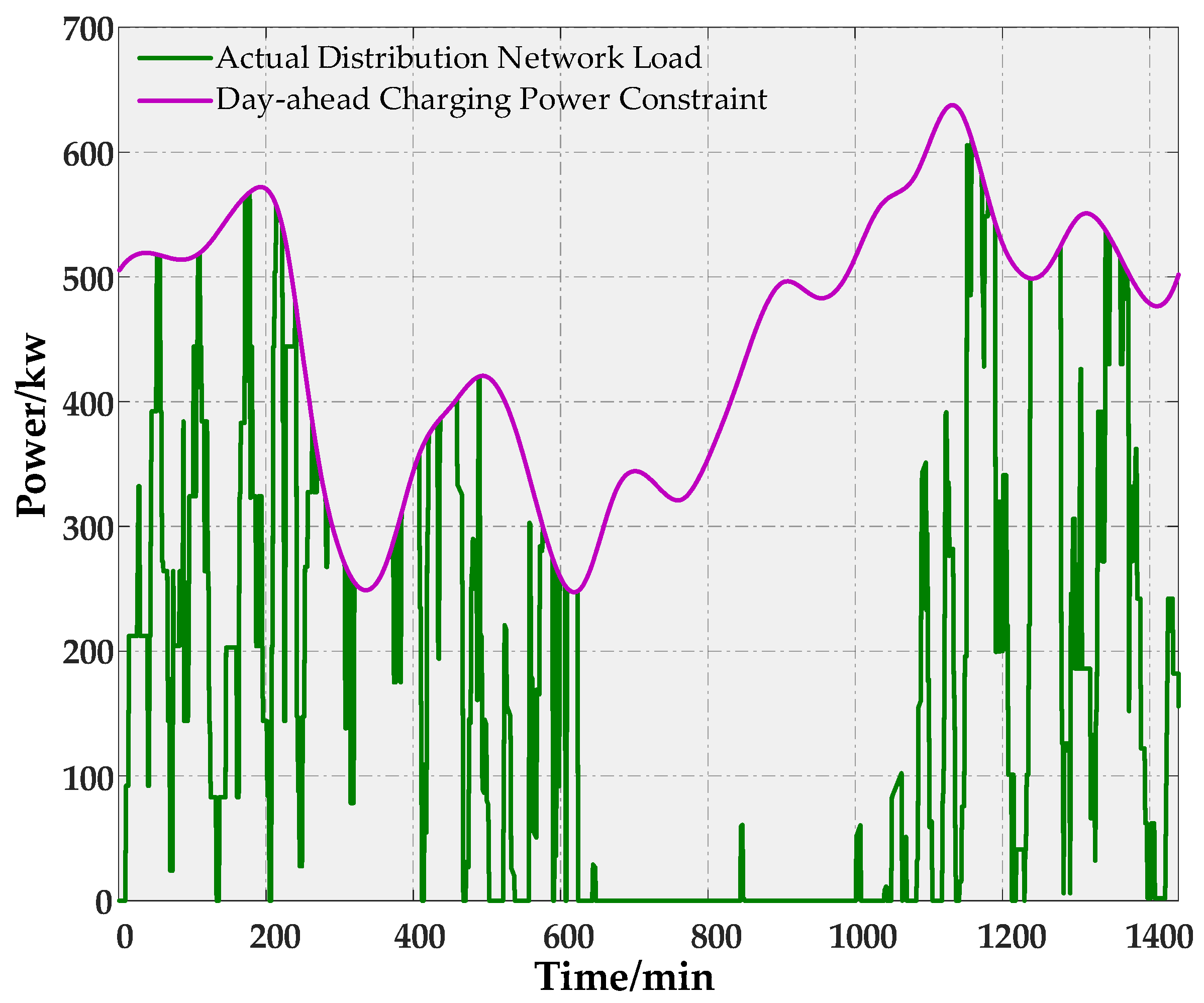
4.4. Simulation of CS Energy Control
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fan, P.; Sainbayar, B.; Ren, S. Operation Analysis of Fast Charging Stations with Energy Demand Control of Electric Vehicles. IEEE Trans. Smart Grid 2015, 6, 1819–1826. [Google Scholar] [CrossRef]
- Tan, J.; Wang, L. Real-Time Charging Navigation of Electric Vehicles to Fast Charging Stations: A Hierarchical Game Approach. IEEE Trans. Smart Grid 2015, 2, 846–856. [Google Scholar] [CrossRef]
- Yunus, K.; Parra, H.Z.D.L.; Reza, M. Distribution grid impact of Plug-In Electric Vehicles charging at fast charging stations using stochastic charging model. In Proceedings of the IEEE European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–11. [Google Scholar]
- Yang, S.N.; Cheng, W.S.; Hsu, Y.C.; Gan, C.-H.; Lin, Y.-B. Charge Scheduling of Electric Vehicles in Highways through Mobile Computing. Math. Comput. Model. 2013, 57, 2873–2882. [Google Scholar] [CrossRef]
- Gusrialdi, A.; Qu, Z.; Simaan, M.A. Scheduling and cooperative control of electric vehicles’ charging at highway service stations. In Proceedings of the IEEE 53rd Annual Conference on Decision and Control (CDC), Los Angeles, CA, USA, 15–17 December 2014; pp. 6465–6471. [Google Scholar]
- Razo, V.D.; Jacobsen, H.A. Smart Charging Schedules for Highway Travel with Electric Vehicles. IEEE Trans. Transp. Electr. 2016, 2, 160–173. [Google Scholar] [CrossRef]
- Gusrialdi, A.; Qu, Z.; Simaan, M.A. Distributed Scheduling and Cooperative Control for Charging of Electric Vehicles at Highway Service Stations. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2713–2727. [Google Scholar] [CrossRef]
- Brenna, M.; Longo, M.; Yaïci, W. Modelling and Simulation of Electric Vehicle Fast Charging Stations Driven by High Speed Railway Systems. Energies 2017, 10, 1268. [Google Scholar] [CrossRef]
- Rigas, E.S.; Ramchurn, S.D.; Bassiliades, N.; Koutitas, G. Congestion management for urban EV charging systems. In Proceedings of the IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013; pp. 121–126. [Google Scholar]
- Schürmann, D.; Timpner, J.; Wolf, L. Cooperative Charging in Residential Areas. IEEE Trans. Intell. Transp. Syst. 2017, 99, 1–13. [Google Scholar] [CrossRef]
- Szczurek, P.; Xu, B.; Wolfson, O.; Lin, J.; Rishe, N. Learning the relevance of parking information in VANETs. In Proceedings of the Seventh ACM International Workshop on VehiculAr Internetworking, Chicago, IL, USA, 24 September 2010; ACM: New York, NY, USA, 2010; pp. 81–82. [Google Scholar]
- Cao, Y.; Kaiwartya, O.; Wang, R.; Jiang, T.; Cao, Y.; Aslam, N.; Sexton, G. Toward Efficient, Scalable, and Coordinated on-the-Move EV Charging Management. IEEE Wirel. Commun. 2017, 24, 66–73. [Google Scholar] [CrossRef]
- Silvestre, D.; Sanseverino, R.; Zizzo, G.; Graditi, G. An optimization approach for efficient management of EV parking lots with batteries recharging facilities. J. Ambient Intell. Humaniz. Comput. 2013, 4, 641–649. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.; Wu, J.; Jenkins, N.; Jia, H.; Wang, C. A Spatial–Temporal model for grid impact analysis of plug-in electric vehicles. Appl. Energy 2014, 114, 456–465. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of Load Demand Due to EV Battery Charging in Distribution Systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Awadallah, M.A.; Singh, B.N.; Venkatesh, B. Impact of EV Charger Load on Distribution Network Capacity: A Case Study in Toronto. Can. J. Electr. Comput. Eng. 2016, 39, 268–273. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, S. Grid Power Peak Shaving and Valley Filling Using Vehicle-to-Grid Systems. IEEE Trans. Power Deliv. 2013, 28, 1822–1829. [Google Scholar] [CrossRef]
- Xi, X.; Sioshansi, R. Using Price-Based Signals to Control Plug-in Electric Vehicle Fleet Charging. IEEE Trans. Smart Grid 2014, 5, 1451–1464. [Google Scholar] [CrossRef]
- Hu, Z.; Zhan, K.; Zhang, H.; Song, Y. Pricing mechanisms design for guiding electric vehicle charging to fill load valley. Appl. Energy 2016, 178, 155–163. [Google Scholar] [CrossRef]
- Ghavami, A.; Kar, K.; Bhattacharya, S.; Gupta, A. Price-driven charging of Plug-in Electric Vehicles: Nash equilibrium, social optimality and best-response convergence. In Proceedings of the 47th Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 20–22 March 2013; pp. 1–6. [Google Scholar]
- Luo, C.; Huang, Y.F.; Gupta, V. Stochastic Dynamic Pricing for EV Charging Stations with Renewables Integration and Energy Storage. IEEE Trans. Smart Grid 2018, 9, 1494–1505. [Google Scholar] [CrossRef]
- Fan, H.; Hou, H.; Ke, X.; Zhu, G.; Chen, W. The Optimal Charging Strategy of EV Rational User Based on TOU Power Price. In Proceedings of the IEEE International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration, Wuhan, China, 3–4 December 2016; pp. 376–379. [Google Scholar]
- Liu, M.; Mcloone, S.; Studli, S.; Middleton, R.; Shorten, R.; Braslavs, J. On-off based charging strategies for EVs connected to a Low Voltage distributon network. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Kowloon, China, 8–11 December 2013; pp. 1–6. [Google Scholar]
- Masuch, N.; Keiser, J.; Lützenberger, M.; Albayrak, S. Wind power-aware vehicle-to-grid algorithms for sustainable EV energy management systems. In Proceedings of the IEEE International Electric Vehicle Conference (IEVC), Greenville, SC, USA, 4–8 March 2012; pp. 1–7. [Google Scholar]
- Zheng, J.; Wang, X.; Men, K.; Zhu, C.; Zhu, S. Aggregation Model-Based Optimization for Electric Vehicle Charging Strategy. IEEE Trans. Smart Grid 2013, 4, 1058–1066. [Google Scholar] [CrossRef]
- Yagcitekin, B.; Uzunoglu, M. A double-layer smart charging strategy of electric vehicles taking routing and charge scheduling into account. Appl. Energy 2016, 167, 407–419. [Google Scholar] [CrossRef]
- Chaudhari, K.; Ukil, A.; Kumar, K.N.; Manandhar, U.; Kollimalla, S.K. Hybrid Optimization for Economic Deployment of ESS in PV Integrated EV Charging Station. IEEE Trans. Ind. Inf. 2017, 14, 101–116. [Google Scholar] [CrossRef]
- Xu, Z.; Su, W.; Hu, Z.; Song, Y.; Zhang, H. A Hierarchical Framework for Coordinated Charging of Plug-In Electric Vehicles in China. IEEE Trans. Smart Grid 2017, 7, 428–438. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Description |
|---|---|
| VINLIST | a list of VIN of EV being charged at the CS |
| Mark(.) | a function that can mark the VIN of EV which is the last one accessing the charging pile |
| VIN | VIN of the lth EV |
| CPLIST | a list of power output of charging pile at the CS |
| Tsys | the current system time |
| Pjst | the proposed power output of the ESB at jth CS |
| SoCj+ | maximum SoC of energy storage at the jth CS. |
| SoCIni | initial SoC value |
| SoCSign | sign of insufficient state of energy storage: 0 and 1 represent sufficient and insufficient state |
| Tdmax | charging end-time of the last EV at the CS |
| CSID | Capacity of Distribution Transformer/kW | Installed Capacity of New Energies/kW | Energy-Storage Capacity/kW·h | Number of 60 kW Charging Pile | Number of 120 kW Charging Pile |
|---|---|---|---|---|---|
| 1 | 400 | 0 | 0 | 4 | 2 |
| 2 | 400 | 0 | 0 | 6 | 1 |
| 3 | 240 | 0 | 0 | 5 | 0 |
| 4 | 240 | 0 | 0 | 5 | 0 |
| 5 | 250 | 250 | 250 | 5 | 0 |
| 6 | 250 | 250 | 250 | 5 | 0 |
| 7 | 400 | 200 | 250 | 5 | 2 |
| 8 | 400 | 200 | 250 | 5 | 2 |
| 9 | 800 | 300 | 500 | 10 | 4 |
| Model | Charging Power/kW | Capacity of Power Battery/kW·h |
|---|---|---|
| CarI | 60 | 20 |
| CarII | 120 | 35 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, R.; Huang, X.; Zhang, Z.; Chen, Z.; Duan, R. A High-Efficiency Charging Service System for Plug-in Electric Vehicles Considering the Capacity Constraint of the Distribution Network. Energies 2018, 11, 911. https://doi.org/10.3390/en11040911
Ye R, Huang X, Zhang Z, Chen Z, Duan R. A High-Efficiency Charging Service System for Plug-in Electric Vehicles Considering the Capacity Constraint of the Distribution Network. Energies. 2018; 11(4):911. https://doi.org/10.3390/en11040911
Chicago/Turabian StyleYe, Rui, Xueliang Huang, Ziqi Zhang, Zhong Chen, and Ran Duan. 2018. "A High-Efficiency Charging Service System for Plug-in Electric Vehicles Considering the Capacity Constraint of the Distribution Network" Energies 11, no. 4: 911. https://doi.org/10.3390/en11040911