1. Introduction
Among variable-speed constant-frequency (VSCF) wind energy conversion systems (WECS), a brushless doubly-fed induction generator (BDFIG) is a reliable option that inherits the doubly-fed induction generator (DFIG)’s benefits of low cost structure due to the facts that no permanent magnets materials are utilized and only a fractionally rated converter is needed. Simultaneously, the absence of electric slip rings eliminates one of the main failure modes of the DFIG [
1,
2]. The BDFIG also has a significantly enhanced low-voltage ride-through performance in contrast with a DFIG [
3]. Furthermore, it is a medium velocity machine, which increases the efficiency due to the avoidance of a high-speed gear stage.
The control of BDFIG systems has recently received much more attention than ever. In particular, a classical vector control (VC) oriented power winding (PW) stator flux is presented in [
4,
5,
6,
7,
8], where the instantaneous PW stator active and reactive powers are controlled by regulating the decoupled control winding (CW) currents, and proportional-integral (PI) controllers are employed. Moreover, VC-based unbalanced operation is investigated [
6,
7], and the typical improved algorithm includes employing PI regulators implemented in the positive and negative sequence counter-rotating synchronous reference frame, respectively [
6], or PI plus resonant (PIR) regulators to implement the precise control of currents in a positive sequence synchronous reference frame [
7]. Besides, VC-based sensor-less control is developed as well [
8]. The main drawback for VC is that the performance highly relies on the harmony of the controller parameters and accurate generator parameters. Besides, in view of the discrete operation of source converters, direct control (DC) was proposed in [
9,
10,
11,
12,
13]. Such a scheme directly controls the generator torque or power, reduces the complexity of the VC and minimizes the effect of generator parameters. Initially, the traditional lookup table (LUT) DC, selects the proper voltage vectors directly from a predefined optimal switching signals LUT based upon the information of the machine [
9,
10], and can further implemented in unbalanced situations [
11]. Moreover, in [
12] the synthetic vector direct control solved the out of control issues. Nevertheless, the main drawback lies in the fact the converter switching frequency varies with the hysteresis bandwidth and operation, as a result, a PW stator side filter is needed to prevent a broad-band harmonics spectrum from injecting into the grid. Besides, a high sampling frequency is required to ensure admissible performances. To solve this issue, a predictive DC strategy was presented in [
13], where the duration times of each voltage vector were optimized with the cost function target of reduce ripple in the torque and flux. Although possibly constant switching frequency is achieved, complicated online calculations are needed. Model predictive control directly calculates the required voltage vectors within each sampling period [
14], however, it is quite sensitive to machine parameter variations, moreover, it necessitates the rotating coordinate transformations. Besides, an indirect stator-quantities control [
15] implemented in stationary reference frames, and inner loops regulator incorporating pulse width modulation (PWM) was developed. Apparently, like VC, a simple linear approximation of the error can cause the system performance to degrade due to the nonlinear nature of converters.
The study primarily addressed grid-connected operation mode. On the other hand, the development of WECS and the distributed generation concept especially resulted in isolated grids, Therefore, the stand-alone operation application is imperative. Meanwhile, relatively less work has been focused on the stand-alone operation. The VC scheme is designed and verified in [
16,
17]. Furthermore, a PIR regulator is employed to eliminate harmonics [
18]. Nevertheless, VC schemes have the weak robustness to parameter variations, etc. The predictive DC scheme [
14] required complicated calculations, while a direct voltage control scheme [
19] neglected the impact of load current on the terminal voltage. Moreover, the above methods were implemented in the synchronously reference as well.
The sliding-mode (SM) control (SMC) strategy is an effective scheme for nonlinear systems with uncertainties. It features simple implementation, disturbance rejection, strong robustness, and sensitive responses. An SMC approach for DFIGs driven by turbines has been proposed in [
20,
21,
22,
23,
24,
25,
26,
27]. In particular, a first-order SMC leads to a variable switching frequency [
21] and broadband harmonics. This problem is solved through application of a boundary layer [
22]. Nevertheless, the ultimate tracking accuracy was partially lost. Furthermore, SM surfaces are set as the integral forms to minimize errors and maintain an enhanced response [
23]. Besides, for the sake of suppressing chattering, the second-order SMC was proposed in [
24], and to deal with either unbalanced or distorted grid voltages as well [
25], however tuning the control parameters is a challenge. The fractional order SMC offers more flexibility, and hence optimizes the dynamic response [
26,
27], but it is not supported by sufficient experimental validation yet. Apparently, like the VC scheme, all of the process still requires rotating coordinate transformation. So far there is less literature associated with SMC for BDFIG.
In order to tackle the disadvantages highlighted earlier, this paper presents a novel direct flux control (DFC) scheme for stand-alone operation BDFIG using a resonant(R)-based SMC approach. It simply regulates the instantaneous PW stator flux without extra CW current control or involving rotating coordinate transformations. The required CW stator voltage can be directly procured in the PW stator stationary reference frame and a nonlinear reduced order generalized integrator (ROGI)-based sliding surface is introduced. The constant switching frequency is achieved by a space vector modulation (SVM) technique. As a result, enhanced dynamic performance alike to the DC scheme is obtained and steady state harmonic spectra are maintained at the same level as with the VC strategy. The rest part of the paper is organized as follows: in
Section 2, the operation of BDFIG is briefly summarized, and the model and dynamic behavior is given. In
Section 3, the ROGI-based R SM DFC approach is devised and analyzed entirely.
Section 4 demonstrates the performance of the scheme by experiments. Finally, the conclusions are presented in
Section 5.
3. Proposed DFC Using R-SMC Approach
3.1. Reference Flux Quantity
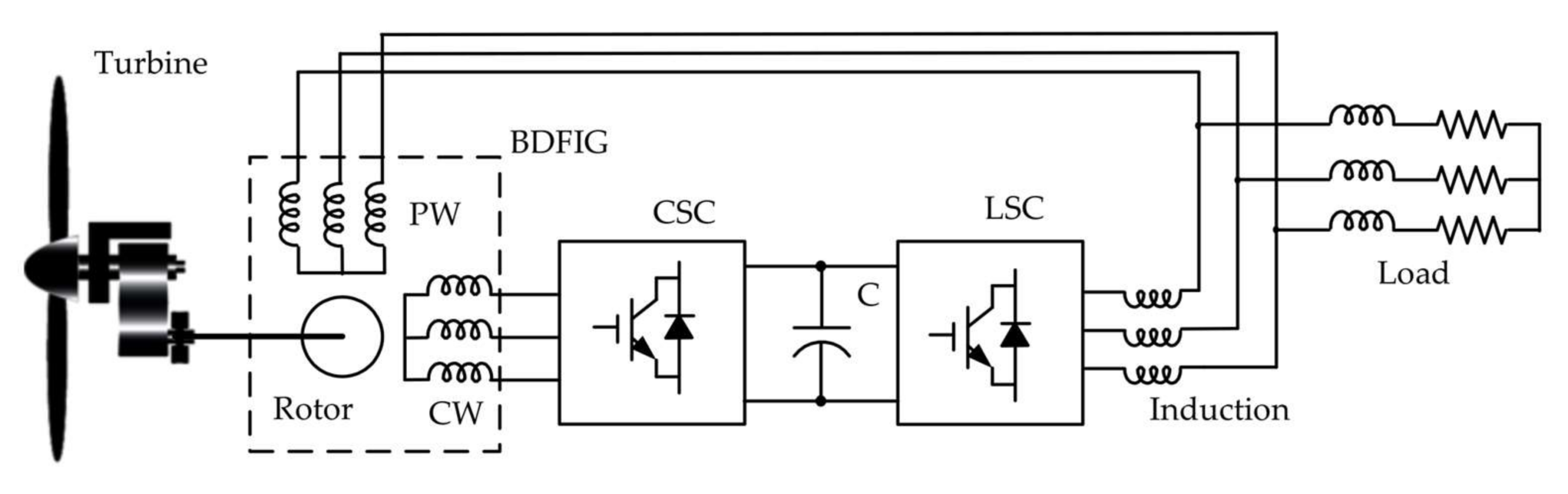
The stand-alone operation BDFIG must supply constant amplitude and frequency of voltage at the PW stator terminals irrespective of the varying shaft rotational velocity due to wind turbine speeds and varying loads. The PW stator voltage is indirectly determined through PW stator flux which is regulated by CW stator excitation current, thus the reference quantity can be set as PW stator flux. PW stator voltage phase angle can be derived directly from a free-running integral of the PW stator frequency reference, and according to PW stator voltage Equation (2), the commanded PW stator flux value is calculated from integration of the PW stator back electromotive force (EMF) references:
As the flux estimation proposed in Equation (17) will produce direct-current (DC) drift at low frequency in this implementation, the DC drift is extracted and eliminated with a low-pass filter instead of a pure integrator. In addition, generally speaking, the integral model is irrelevant to additional generator parameters, except for the PW stator resistance whose impact on the system performance is inappreciable thanks to the smaller voltage drop relatively high grid frequency.
3.2. Sliding Surface
The control objectives for stand-alone operation BDFIG systems are to track or slide along the predefined PW stator flux trajectories. Thus the sliding switching surface is set as:
The derivation of resonant sliding surface is based on the stationary reference frame implementation of a synchronous integrator. In the PW synchronous rotating reference frame, both the current references and disturbance is characterized by a DC signals in steady state, for purpose of minimizing the steady state error while the enhanced transient response remains, the sliding switching surfaces can be set as the integral form generally [
22,
23]:
where,
is the instantaneous error between the references and the actual values,
K is positive control gain coefficient matrix. An integrator implemented in synchronous reference frame with input
and output
is described by:
Nevertheless, integral sliding surfaces can only regulate the DC signals of the feedbacks to track the references in the synchronous reference frame but not alternating-current (AC) signals in stationary reference frame due to the lower amplitude responses at high frequency. Note that the relation between the variables in the synchronous rotating frame and the stationary frame is
, thus the integrator may be transformed to stationary reference frame by taking a frequency shift of −
ω for the positive sequence, the stationary frame generalized integrator (SGI) is mostly performed from equivalent synchronous rotating frame integrator whose transfer function be given as:
SGI, herein is also named ROGI relative to second-order generalized integrator (SOGI). It must be noted that with two ROGI a SOGI can be constructed:
The fewer states in the ROGI’s implementation against the SOGI’s and the close relation between both are the reasons why is named ROGI. Therefore, the ROGI requires less computational burden [
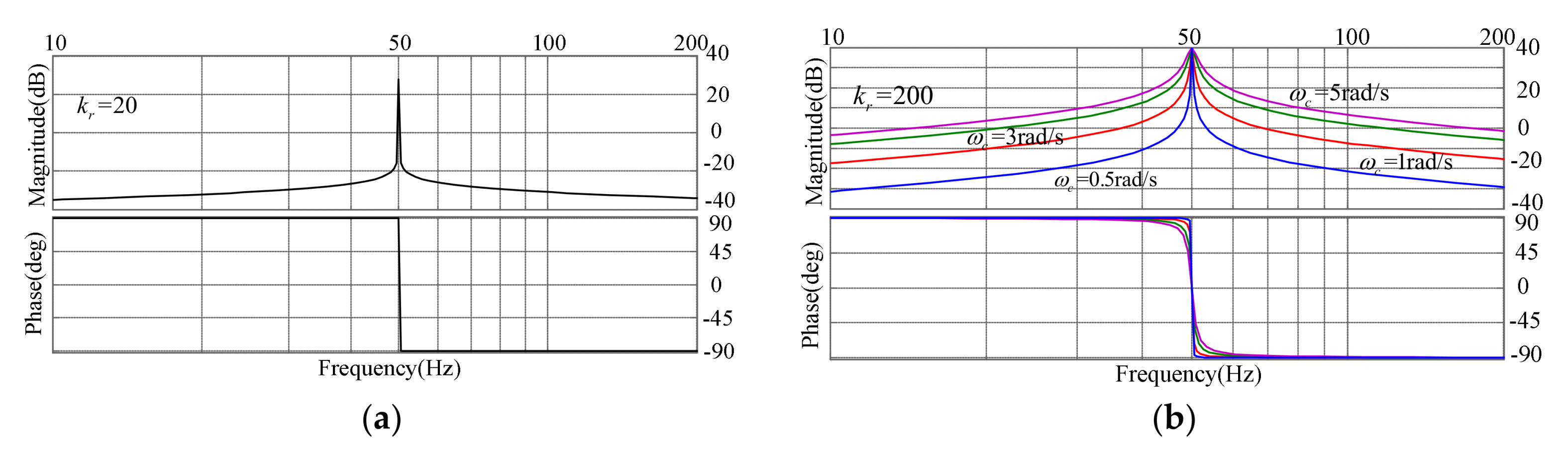
29]. In addition, both SOGI and ROGI are resonant controllers that eliminate the sinusoidal tracking error thanks to their infinite gain and zero phase shift to special order resonant frequency signals, but ROGI can provide discrimination between positive and negative sequence signals. The ROGI frequency response (magnitude and phase) be shown in
Figure 4a. In fact, utilization of resonant controllers in AC tracking systems is a straightforward conclusion of internal model principle, explaining that provided to achieve zero steady-state error in a stable feedback system, the loop gain must contain a model, which can generate the required reference and disturbance signals, requiring integrative controller in DC systems and resonant controller in AC systems [
29]. In the stationary frame, both the reference and disturbance behave like AC signals. Therefore, there should be a sinusoidal internal model in the controller so as to eliminate the tracking error in special orders. Besides, the magnitude and phase response changes precipitously at the adjacent of resonant frequency, therefore the steady accuracy and stability would be deteriorated as a result of frequency deviates. For the purpose of weaken the sensitivity toward slight frequency variations and increase the bandwidth around the resonant frequency, a component with cutoff frequency
ωcf is inserted to well compromise in practice. As seen from the Bode diagram of improved quasi ROGI with different bandwidth coefficients in
Figure 4b, the response is much smoother changing at the adjacent of resonant frequency.
Then, an improved ROGI resonant sliding surface which be tuned at fundamental frequency is defined as Equation (23) for PW stator stationary reference frame:
In general, the main advantages of this proposed ROGI are as follows: it provides infinite gain and zero phase shift to special order resonant frequency signals, which can eliminate the sinusoidal tracking error and offer discrimination between positive and negative sequences. As a consequence, implemented in stationary reference frame hence no extra synchronous rotating coordinate transformations and angular information involved, reducing the overall computational burden. The fewer states of the ROGI, which imply a minimum computational burden, make it ideal for low cost digital signal processor (DSP) implementation. A component with cutoff frequency is introduced, which reduces the sensitivity toward slight frequency variations and increases the bandwidth around the resonant frequency, thus ensuring the better robustness of steady state accuracy against frequency deviations.
3.3. SMC Law
As the name SMC indicates, the objective is to force the system state trajectory to the interaction of the switching surfaces. This section presents the design of an SMC scheme to generate the CW stator voltage reference.
The manifold
S = 0 represent the precise tracking of PW stator flux. When the system states reach the sliding manifold and slide along the surface, then leads to:
According to Equations (23) and (24), derivatives of
S equal zero, thus we obtain:
The equations mentioned before guarantee the PW stator flux errors converges to zero, and a positive control gain matrix
K is selected for the expected system transients. The PW stator flux will converge asymptotically to the reference value with time constant matrix of 1/
K. Then, the device objective is aimed at accomplishing sliding mode in the manifolds
S = 0 with discontinuous CW stator voltage vectors:
Setting
ω = 0 in Equation (16) for stationary reference frame and substituting it into Equation (26), then leads to:
where:
and:
Splitting
F into α-β components and arranging them in matrix form yields:
A Lyapunov method is employed for deducing the control law that will drive the state orbit to the equilibrium manifold [
22]. The quadratic Lyapunov function is chosen as:
The time derivative of
W on the state trajectories of Equation (28) is obtained by:
The switch control law must be selected so as to ensure the time derivative of
W is definitely negative with
S ≠ 0. Therefore, the following control law is chosen:
where
sgn(
S1) and
sgn(
S2) are respectively sign functions for
α-β components flux error of PW stator. From Equation (30), the SM control law can be divided into two parts: the equivalent control part and the nonlinear switching control part. The equivalent control is used to control the nominal plant model, and the nonlinear switching control is added to ensure the satisfactory performance in spite of parametric uncertainty.
3.4. Proof of the Stability
For stability to the sliding surfaces, it is sufficient to have dW/dt < 0. By setting appropriate switch functions, the stability can be achieved provided the following condition is satisfied:
If
S1sgn(
S1) > 0 and
S2sgn(
S2) > 0 then:
The time derivative of Lyapunov function dW/dt is definitely negative, as a consequence, the control system becomes asymptotically stable.
3.5. Proof of the Robustness
In practice, the sliding surface
S will be affected by the parameter variations, sample errors noises, etc. Therefore, Equation (27) should be rearranged as:
where
represent system disturbances.
Thus, Equation (30) can be rewritten as:
Noting that provided and , i.e., the positive control gains meet the aforementioned condition, the time derivative of Lyapunov function dW/dt is still definitely negative. Thus, the SMC features strong robustness.
3.6. Remedy of Chattering Problem
The fast switching tracking of the instantaneous components may generate unexpected chattering, which may excite unmodeled high-frequency system transients and even result in unforeseen instability. To eliminate this behavior, the discontinuous control is smoothed out by introducing a boundary layer around the sliding surface [
22]. As a result, a continuous saturated function around the sliding surface neighborhood is obtained as:
where
λj > 0 is the width of the boundary layer and
j = 1, 2. Then, the improve control law is obtained as Equation (35) with continuous saturated function instead of switch sign function in Equation (28), and the aforementioned condition of robustness and stability changes correspondingly as well:
3.7. Analyses of Response Sensitivity
The SMC strategy, based on system dynamic characteristics, design sliding surface and the equivalent control, drives the system operation states to converge toward special manifolds in the state space from the hyperplane. According to the conditions for the existence of sliding mode and device discontinuous control, in case of reach the sliding surface, the control system will not be influenced by system parameters and external disturbances, slipping along the slide facing to the origin, and have the desired performance. From the deduction of SM control law Equation (35), the algorithm is not sensitive to machine rating, e.g., power, torque, velocity range. Although equivalent control is relevant to the generator parameters, the nonlinear switching control is added to ensure the desired performance despite parametric uncertainty.
Provided the initial value of the system state variable is
, substituting SM control law to state Equation (27), then we have:
The time of the system arrival SM switching surface can be deduced as:
It denotes the dynamic state performance, viz., response sensitivity of the propose strategy. According to Equation (37), obviously, the system not only converges in finite time, but also the increase of k can help reduce the time of system convergence to the SM switching surface, and enhance the response sensitivity, while on the other hand, within the boundary layer, the system no longer absolutely behaves as dictated by the sliding mode. Consequently, the characteristics of response sensitivity, tracking accuracy, etc. are partly compromised. In addition, it is worth noting that direct single control loop rather than extra control inner loop involved results in enhanced controlling bandwidth, and improved response sensitivity.
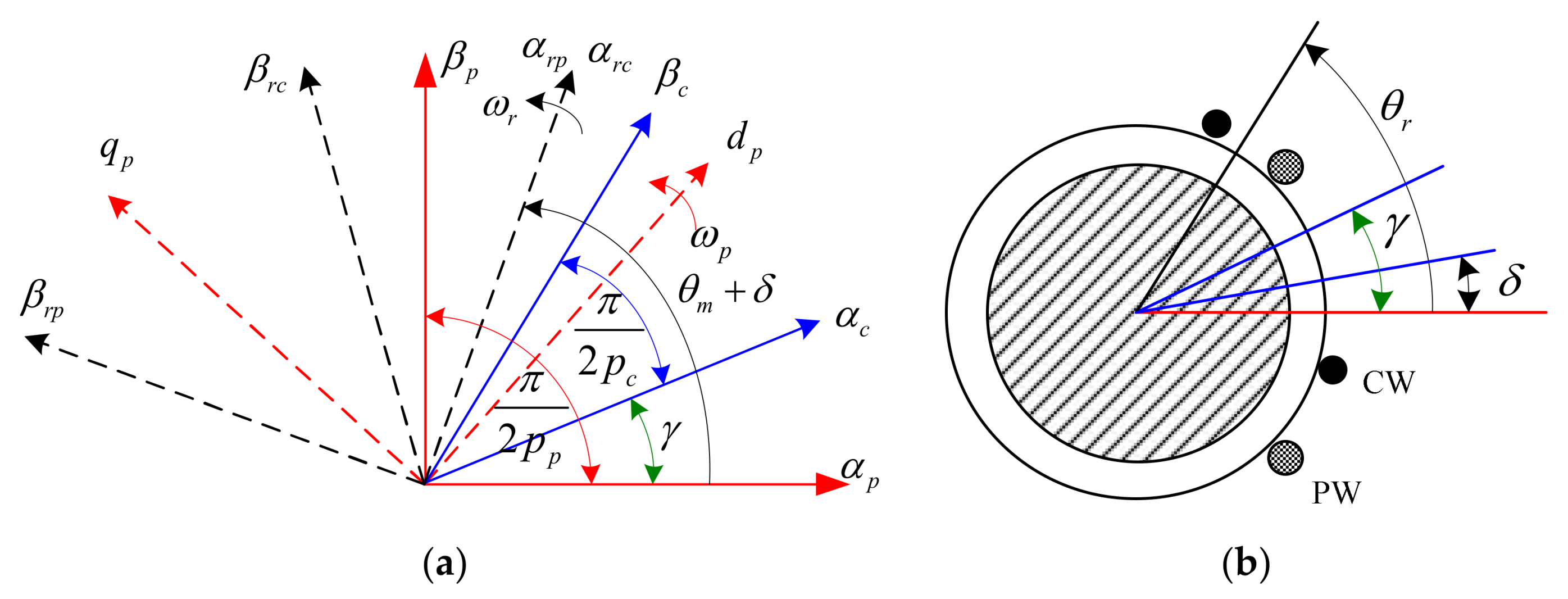
3.8. Stationary Reference Frame Coordinate Transformations
In this control scheme, the CW stator voltage and current magnitudes are expressed in a PW stator stationary reference frame. To express a magnitude
Z from the CW stator (
pc-type pole pairs) stationary reference frame transform into PW stator (
pp-type pole pairs) stationary reference frame, the following relation can be used:
The spatial relationship of CW stator and PW stator stationary reference frames is shown in
Figure 5a, noting that rotor position angular measurement is needed to transform a CW stator to a PW stator stationary reference frame, and initial rotor position angular is also needed to correct alignment [
4]. The different reference axis and initial angular is shown in
Figure 5b.
3.9. CW Stator-Side Output Voltage Limit
For a BDFIG, the maximum output voltage from the CSC is usually within the range of 30% of the PW stator voltage. Under steady-state operation, the required CW stator voltage is unlikely to exceed the output voltage limit of the CSC. However, during dynamic conditions, large and abrupt power variations of load can issue in large PW voltage errors. Consequently, the CW stator voltage calculated using Equations (30) and (35) may exceed the maximum output voltage capability of the CSC denoted as
Ucmax. In practical operation, the limiter is also needed to eliminate stress on the mechanical and electrical elements [
23]. Therefore, the CW stator voltage must be scaled proportionally to improve the transient response. This process can be represented as:
CW stator voltage limit could result in PW stator voltage magnitude being temporarily sag, in this case, the LSC serve as a static volt-ampere reactive generator by injecting a compensate current at the PCC to support voltage.
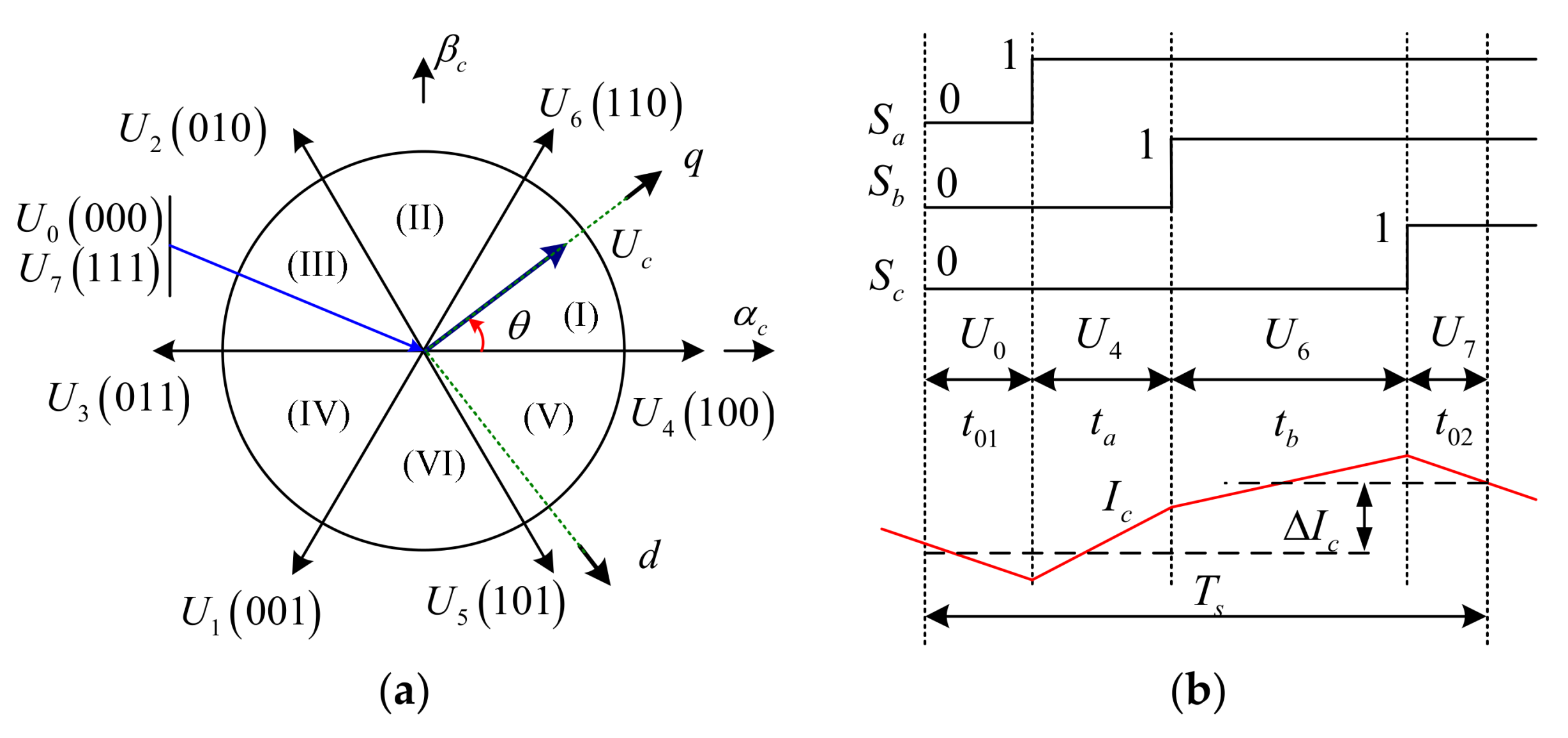
3.10. Voltage Vector Calculation Using SVM
The SVM is employed to generate the respective duration times of required switching voltage vectors. For a VSC feeding CW stator, which the three phase two-level configuration shown in
Figure 6, the output voltages can be expressed by fundamental six active voltage vectors and two zero voltage vectors, indicated as
U0–
U7 in
Figure 7a, where the subscript of
U originates from the binary number expressing the switching pattern in the phase sequence (a, b, c).
For the example shown in
Figure 5a, where the average CW stator voltage vector
Uc is located between
U6 and
U2, the voltage vectors required to reassemble
Uc are
U7,
U6,
U2, and
U0, and their respective durations are calculated as Equation (40):
where
, and
.
CW stator voltage vectors and the impact of CW voltage vectors on the CW stator current is shown in
Figure 7b.
In the case of over-modulation, the zero voltage vector durations
t01 and
t02 calculated using Equation (40) can become negative. Thus, the
ta and
tb must be scaled as:
The SVM is differ from LUT hysteresis modulation which results in deterministic narrowband harmonic spectra with predominant harmonics around the fixed switching carrier frequency and multiples thereof.
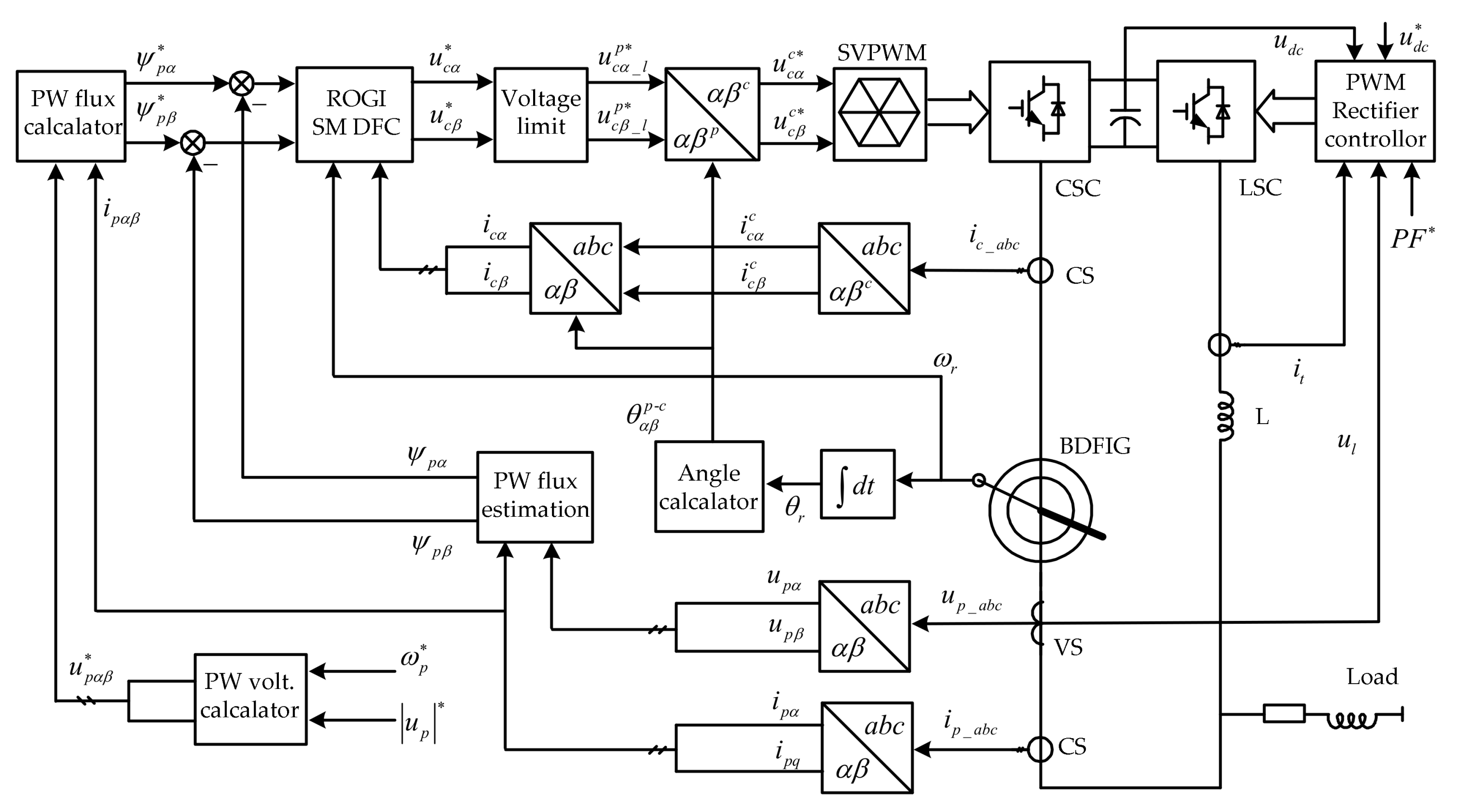
3.11. Control System Implementation
Based on the developed control strategies, the overall schematic diagram of proposed DFC strategy for a stand-alone operation BDFIG system employing the ROGI based R SMC approach is shown in
Figure 8. As can be seen and was previously described, both PW stator voltage, current and CW stator currents is sampled and transformed to the PW stator stationary reference, respectively. The reference of the phase angle is derived directly from a free running integral of the PW stator frequency reference. The rotor position angle
θr can be measured by the encoder. The PW stator flux value can be directly estimated according to integration of the PW stator back EMF which is irrelevant to additional generator parameters, except for the stator resistance. The instantaneous error of PW stator flux can be calculated by comparing the feedback quantity and reference quantity. The control law developed in Equation (35) based on the ROGI resonant sliding surface as Equation (23) is employed, and it simply regulates the instantaneous error of PW stator flux and directly generates the CW stator voltage reference for the CSC without any extra CW stator current control inter loops so as to enhance the transient performance. Afterward, it is transformed into a CW stator stationary reference. Moreover, the reference of the CW stator voltage is limited properly to improve the transient response. In addition, the SVM technique is employed to generate the switching patterns and their respective duration times, besides, achieve constant switching frequency which results in deterministic narrowband harmonic spectra with dominant harmonics around the carrier frequency and multiples thereof in CW stator voltage. Finally, it is worth noting that the proposed control scheme is implemented in the PW stator stationary reference frame hence no extra synchronous rotating coordinate transformations and angular information are involved.
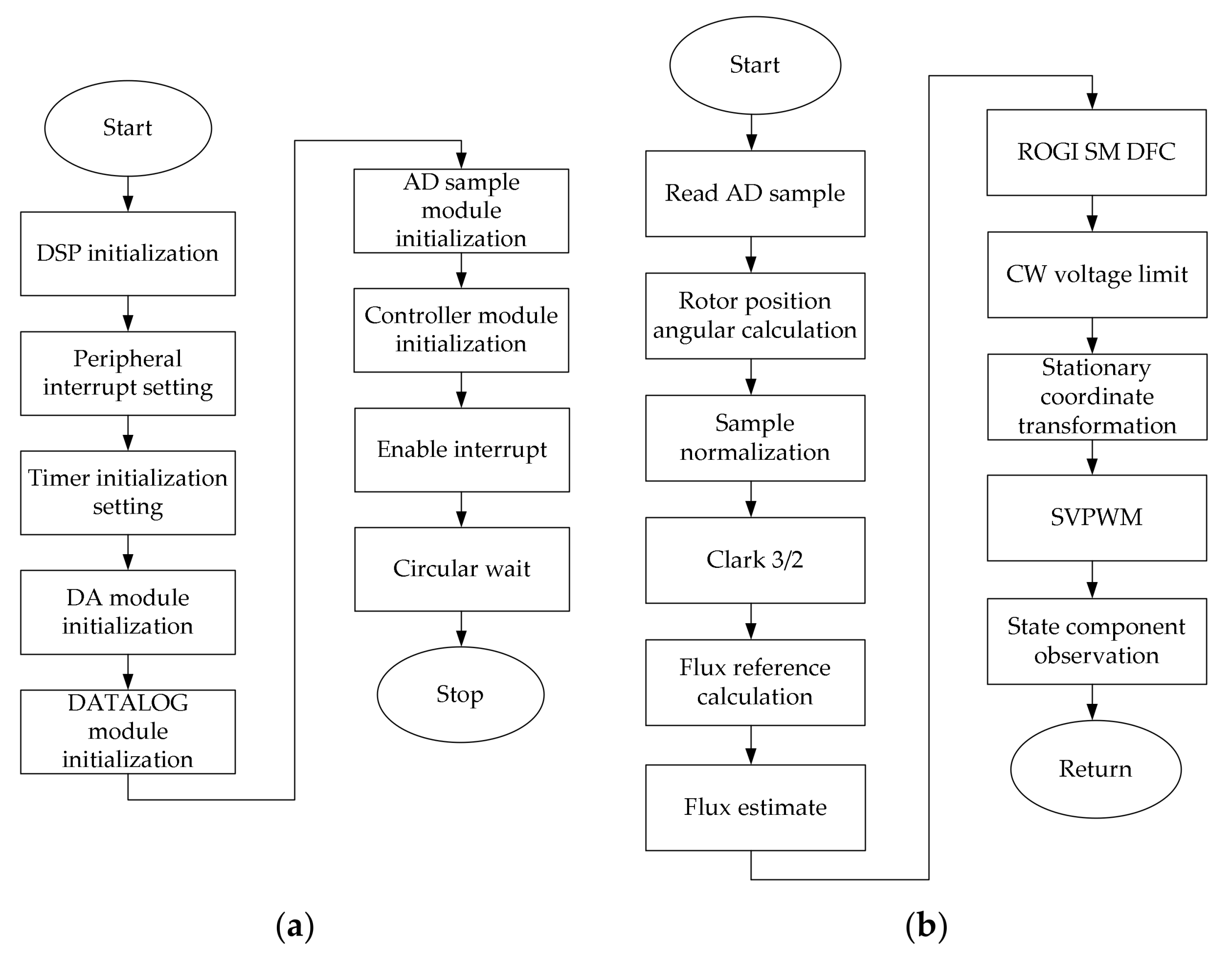
In order to effectively demonstrate the integration process of proposed control strategy, a flow chart is provided as shown in
Figure 9.
3.12. Compared with Conventional Algorithms
Compared with the conventional VC strategy, the proposed novel algorithm is to be implemented in the PW stator stationary reference frame, quite unlike VC in the PW stator synchronous reference frame, thus, no synchronous rotating coordinate transformations and angular information are required. Furthermore, it directly regulate PW stator flux by calculating and adjusting the CW stator voltage, rather than extra CW stator current control loops involved in VC, Moreover, it employed a ROGI-based resonant nonlinear SMC to eliminate the sinusoidal tracking error, whereas, the VC algorithm using PI controller linear regulates with decoupling work. Therefore, in contrast, it features simple implementation, disturbance rejection, strong robustness, and fast dynamic responses.
Different from a conventional DC algorithm, the required CW stator control voltage references can be directly obtained from ROGI SMC and the SVM technique is employed to achieve constant switching frequency, so as to enhance the harmonic spectra performance. On the contrary, the traditional DC strategy selects the proper voltage vectors from a predefined optimal switching signals lookup table according to the machine information. Hysteresis bang–bang control by applying single full voltage vector within each sampling period is the resulting variable switching frequency, which is usually not limited and depends largely on the sampling time, LUT structure, load parameters, and operational state. Thus, it generates a dispersed harmonic spectrum, making it pretty hard to design the filter to absorb the broad-band harmonics spectrum while avoiding unexpected system resonance. Moreover, the filter’s efficiency is reduced with increased size and power losses. Even worse, a high sampling frequency is used to ensure acceptable performances. Besides, model predictive DC control, by contrast, required complicated online calculations, and weak robustness by reason of quite sensitive to parameters variations.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}