1. Introduction
Due to unprecedented worldwide population expansion and rapid economic growth in the past decade, an ever-increasing demand for electrical power is inevitable. Traditional fossil fuels, which supply more than one-quarter of global electricity power, are widely believed to be the main cause of severe global warming, and sustainable energy, such as wind, solar, biomass, tidal, and geothermal, has become a promising solution for continuous fossil fuel depletion [
1,
2,
3,
4]. Nowadays, the cost of renewable energy power generation has decreased with the development of manufacturing and materials technology [
5,
6,
7]. In China, the installed capacity of wind power was more than 168 GW in 2016, which was an increase of 13.8% over the previous year [
8]. However, large-scale wind farms require strict climatic and geographic conditions, i.e., appropriate wind speed and annually stable and consistently abundant winds [
9]. In reality, such areas are often far away from the load centers [
10]. The high-voltage direct current (HVDC) transmission system is believed to be a plausible method for bulk power transmission over long distances [
11], but the extremely high cost of ultra-high voltage power electronic devices is the main obstacle to wide application of HVDC. Furthermore, the distance between the large-scale wind farms and load centers in China is usually thousands of kilometers [
12], thus the half-wavelength transmission line (HWTL) without reactive power compensation or intermediate substations has been considered as a promising alternative for long-distance transmission of bulk renewable energy [
13].
Although the concept of natural half-wavelength power transmission has been proposed since 1939 [
14], the overvoltage, power demands, and other technical problems in modern power systems are very different from the past. Due to the constant fundamental frequency of 50 Hz or 60 Hz, the length of HWTL is fixed at about 3000 km or 2500 km [
15], which restricts its practical application. Consequently, a compensation algorithm was proposed in [
16] to transform a transmission line shorter than half-wavelength to the tuned HWTL with lumped compensation circuit by inductance and capacitance. In addition, ref. [
17] analyzed the differences in overvoltage, voltage distribution, and current distribution between tuned HWTL and natural HWTL. In order to reduce the differences between natural HWTL and tuned HWTL, a lumped compensation circuit was divided into a series of sections and the effects of different sections were thoroughly compared in [
18]. Moreover, ref. [
19] attempted to generate high frequency from 180 Hz to 360 Hz to make half-wavelength lines suitable for short-distance transmission, in which an AC-AC or AC-DC-AC conversion is required to transform high-frequency power to a 50 Hz or 60 Hz component for traditional fundamental frequency loads.
Generally speaking, HWTL can be adversely affected by extreme environmental conditions, e.g., storms [
20], lightning [
21], forest fires [
22], and ice shedding [
23]; such conditions can significantly reduce the air gaps between transmission lines or easily exceed the threshold of insulators, so that a breakdown of transmission line insulation might occur. For the purpose of quickly locating the fault point, several fault location algorithms have been proposed and developed over the past decades, which can be generally classified into the following three groups: (a) fundamental frequency–based method [
24], (b) transmission line differential equations [
25], and (c) travelling wave method [
26]. In particular, they are suitable for different fault types and causes. The first one only needs a low-frequency sampling rate (around 6.4 kHz) but a long time window of voltage and current (>20 ms) [
27]; the second one requires accurate transmission line impedance and a high-frequency sampling rate (around 10 kHz) of voltage and current [
25]; the third one requires an ultra-high-frequency sampling rate (>500 kHz) and a short time window (<5 ms) of current or voltage, in which the signal magnitude will be inevitably decayed in HWTL [
28].
In fact, the above three approaches are all based on the following two techniques: (1) single-end data–based fault location [
29] and (2) double-end data–based fault location [
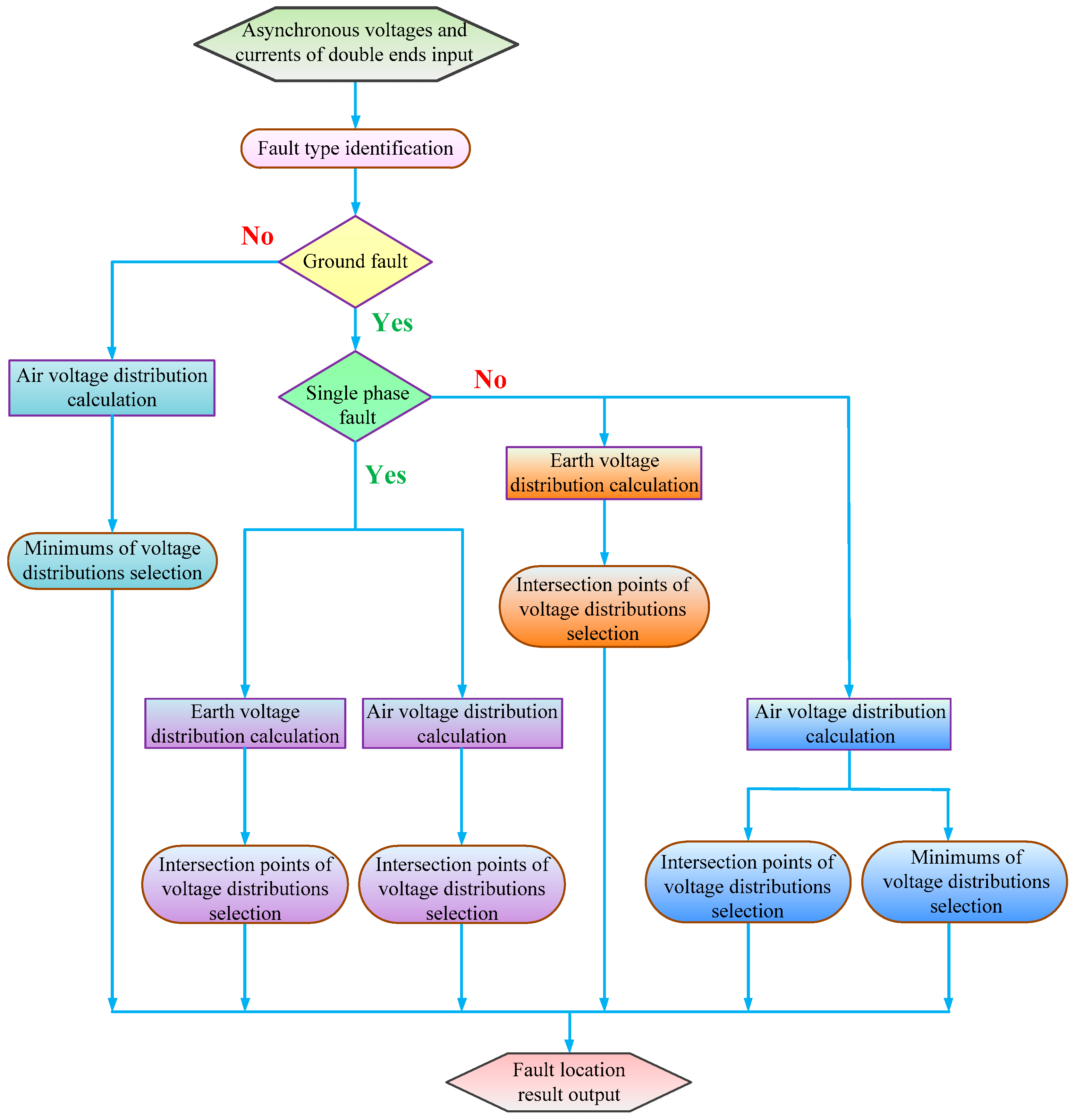
30]. Normally, the fault location accuracy of the former can be considerably degraded as the distance of transmission line increases. Although the fault location accuracy of the latter is insensitive to transmission line distance, it requires accurate synchronous voltages and currents of double ends, which are hard to obtain in HWTL. To handle this challenge, this paper proposes a modal voltage distribution–based asynchronous double-end fault location (MVD-ADFL) method that does not require synchronous voltages and currents. It merely needs a low-frequency sampling rate (around 6.4 kHz) and a long time window of voltage and current (around 20 ms). At first, the modal voltages and currents are calculated from three asynchronous phases by applying phase-modal transformation matrix. Then, the voltages distributed along the modal circuit are calculated from double ends independently. Finally, the fault point is chosen from the interconnection points of modal voltages distributed along transmission lines or the minimum of particular air modal voltage distributions along transmission lines.
The rest of this paper is organized as follows:
Section 2 is devoted to modelling of parallel multiconductor transmission lines, and
Section 3 develops the wavelength calculations of different modes in HWTL.
Section 4 presents the design of the MVD-ADFL method for HWTL. In
Section 5, simulation and real-time digital simulator (RTDS)–based hardware-in-the-loop (HIL) test results on different fault types, distances, resistances, and wind generator capacities are presented to verify the effectiveness of MVD-ADFL.
Section 6 presents a discussion of the adaptivity of MVD-ADFL and the influence of generator types. Finally, some conclusions and possible future studies are summarized in
Section 7.
2. Modelling of Parallel Multiconductor Transmission Lines
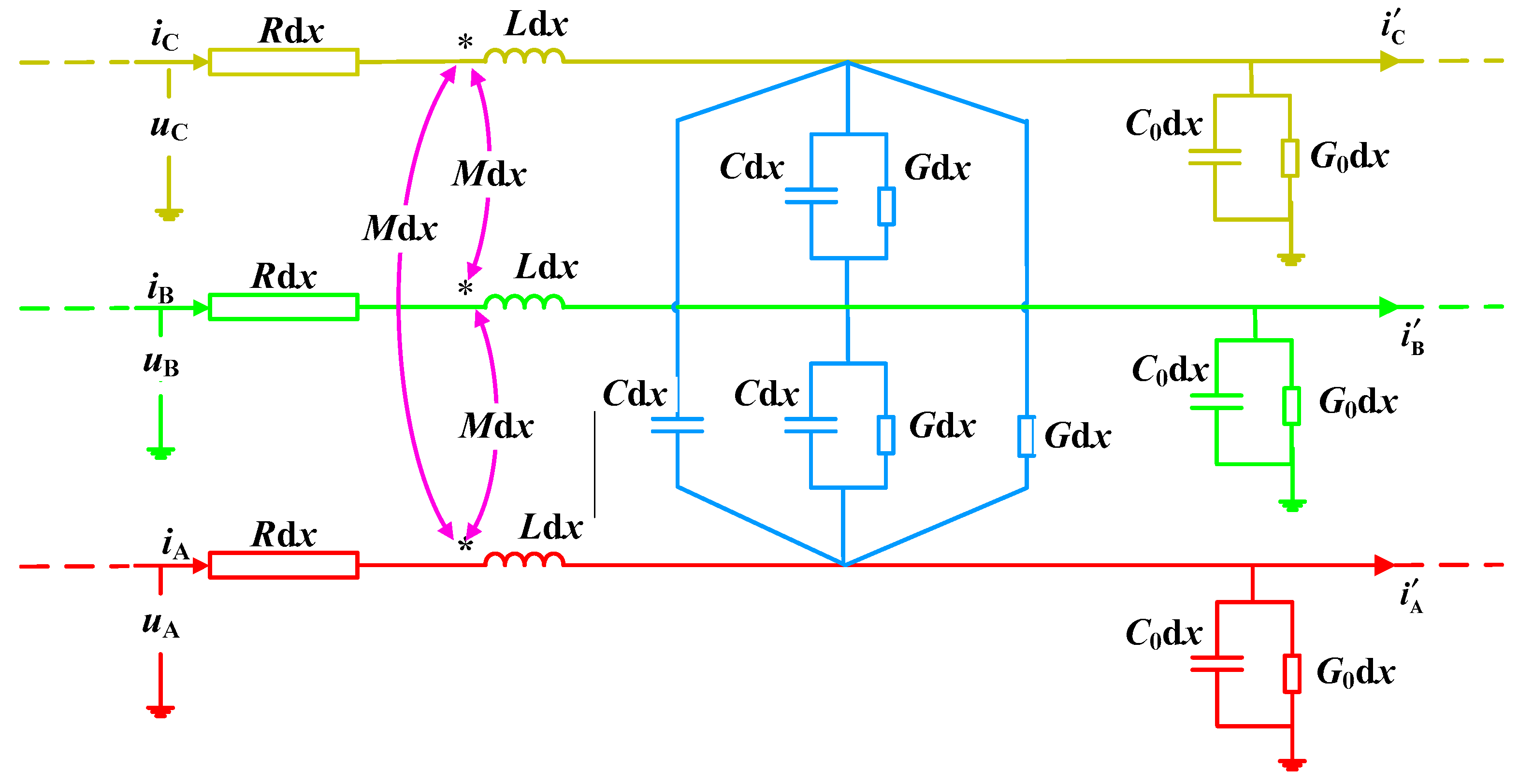
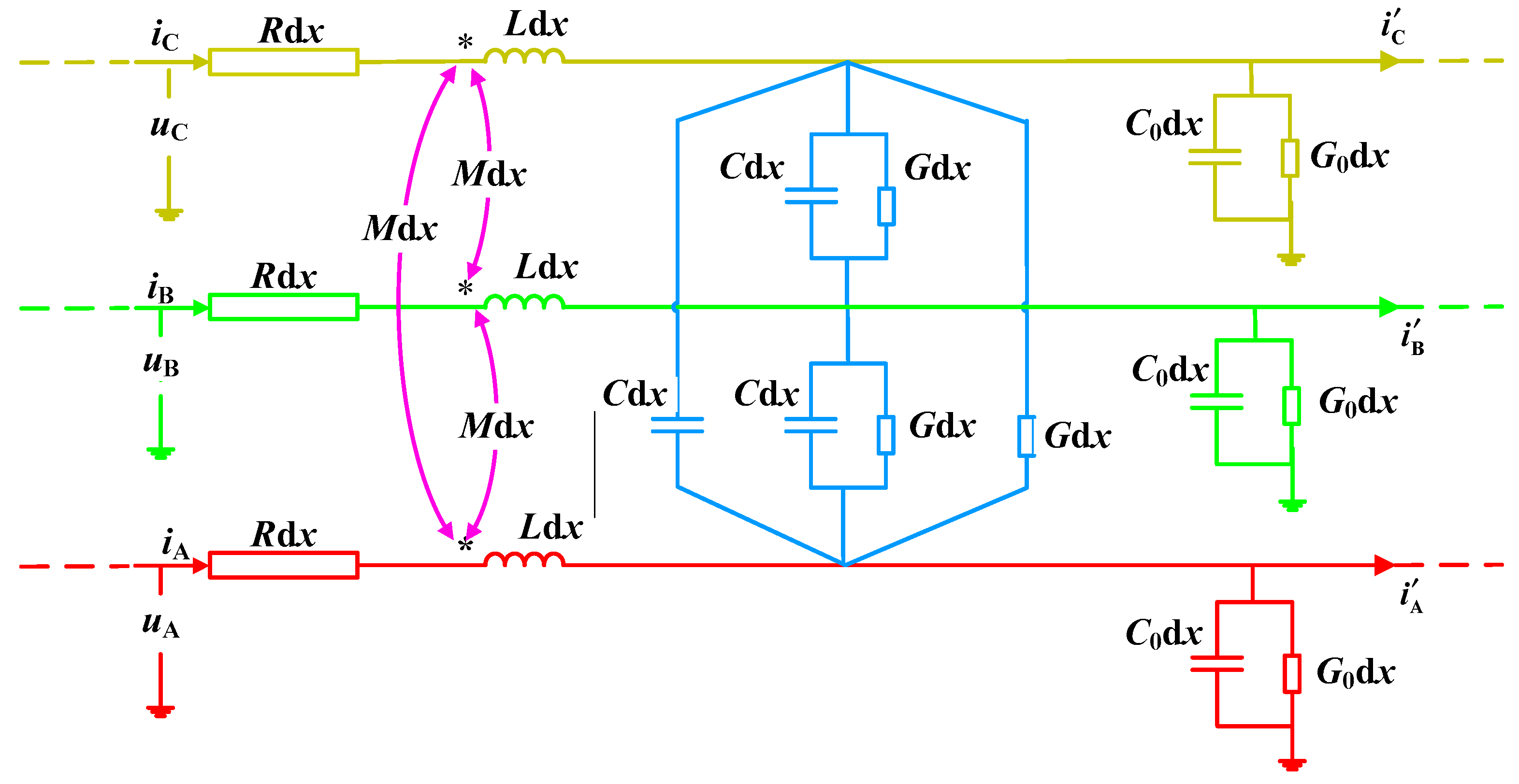
Three-phase transmission lines can be approximated by aggregating equivalent circuit segments distributed along the lines. A line segment with length d
x can be represented by an equivalent resistor, inductor and capacitor (RLC) circuit, as illustrated in
Figure 1, in which the parameters of three lines are assumed to be identical in this paper.
The equations of lossy three-phase transmission lines with constant parameters can be written as
where
uμ and
iμ are the voltage and current of phase
μ (
μ = A, B, and C), respectively;
G0 and
C0 are the conductance and capacitance per unit (p.u.) length between line and earth, respectively;
G,
C, and
M are the conductance, capacitance, and mutual inductance between line and line in p.u., respectively; and
R and
L are the line resistance and inductance in p.u., respectively.
If only one frequency component needs to be analyzed in voltage and current, the time-domain Equations (1) and (2) can be transformed to the following frequency-domain equation:
where the angular frequency
ω = 2π
f;
and
are the voltage and current of phase
μ in the frequency domain,
f is the fundamental frequency, and
j is the imaginary unit. Equations (3) and (4) are the three-phase wave equations.
The wave equations can be obtained from Equations (3) and (4) as
In order to reduce the complexity of the equation, phase A is taken as an example. The relationship between
and
,
and
can be written as
Equations (7) and (8) are both ordinary differential equations, thus their solutions can be obtained as
where
A1 to A4 and B1 to B4 are calculated from phase A, while A5 to A8 and B5 to B8 are from phases B and C.
The voltage and current of the sending end are denoted as
The voltage and current after propagation along transmission lines with number of
x can be written as
where
where
and
are the propagation constants and
and
are characteristic impedances, as follows:
As shown in Equations (6)–(22), the voltage and current propagated along any transmission line will be affected by electromagnetic waves travelling along other parallel conductors due to the coupling of electromagnetic fields. If the characteristics of multiconductor transmission lines are symmetric, the electromagnetic wave propagating along those lines can be represented by the sum of three-phase voltage and current, with two different propagation constants and two different characteristic impedances. In order to simplify the analysis of travelling waves in multiconductor transmission lines, the impedance matrix and admittance matrix are transformed to diagonal matrices, of which each diagonal element denotes the impedance and admittance of an uncoupled circuit, and the phase voltage and phase current are transformed to modal voltage and modal current that propagate along the special uncoupled circuit. In particular, most of the uncoupled circuits, e.g., air mode, represent the circuit between conductors, while one of them is the circuit named “earth mode” between line and earth.
5. Case Studies
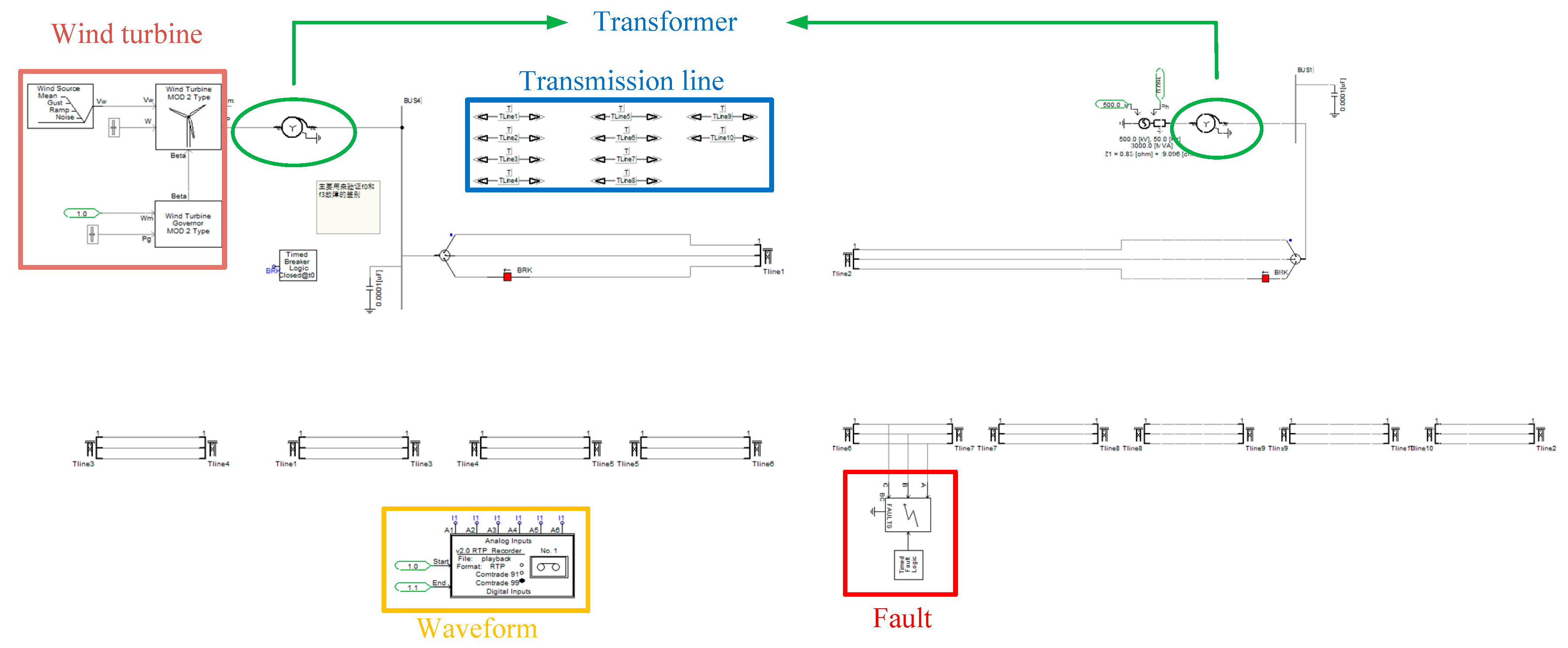
5.1. Simulation Model
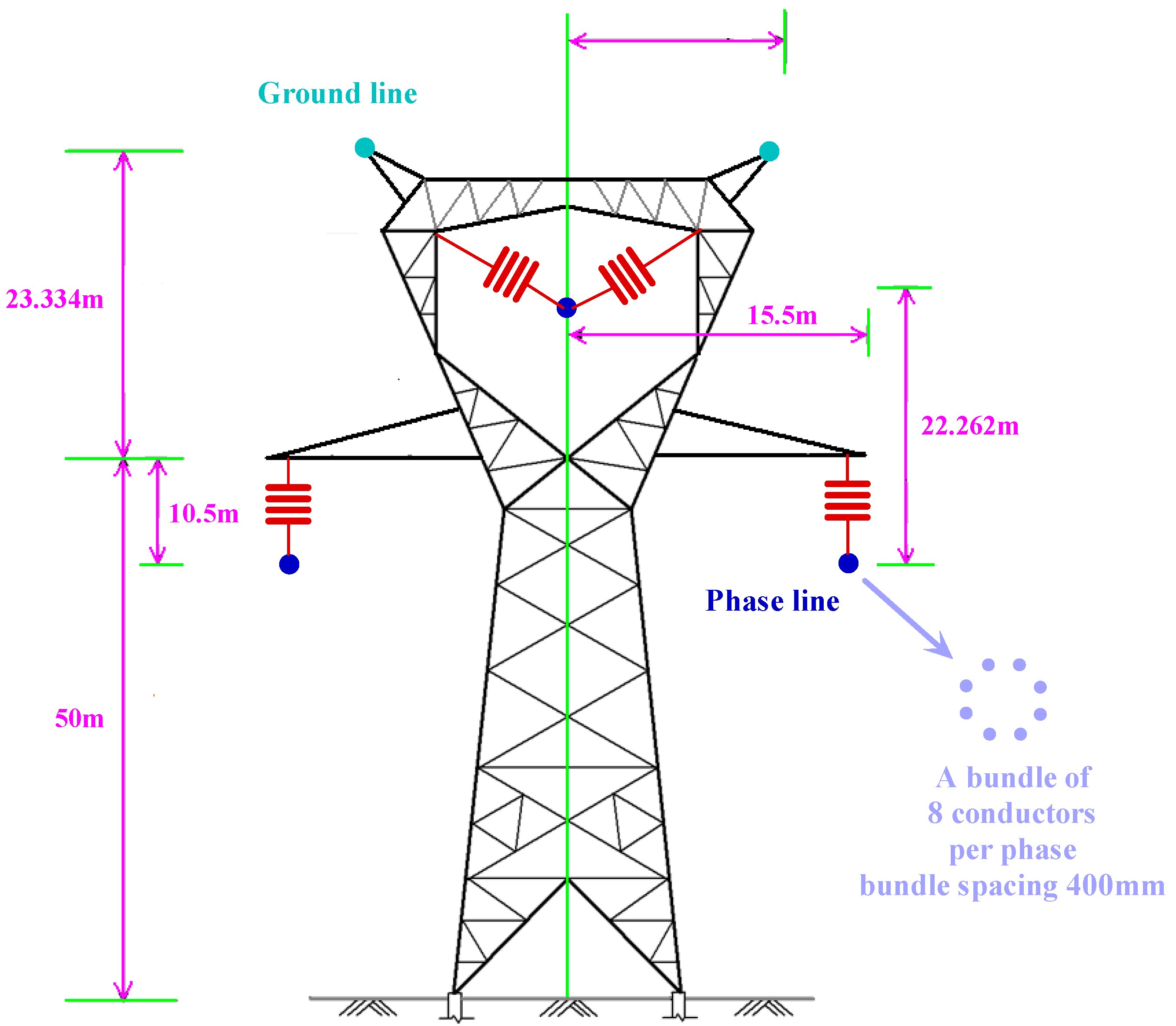
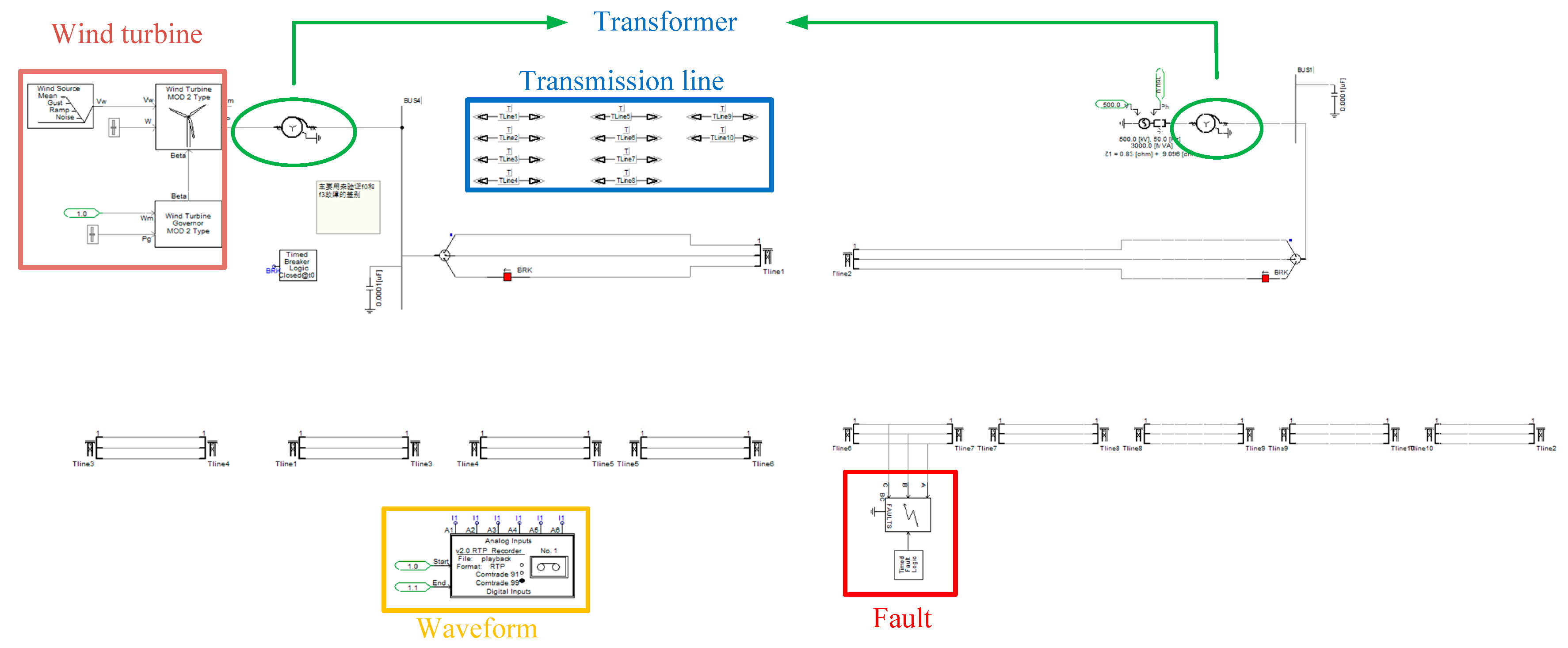
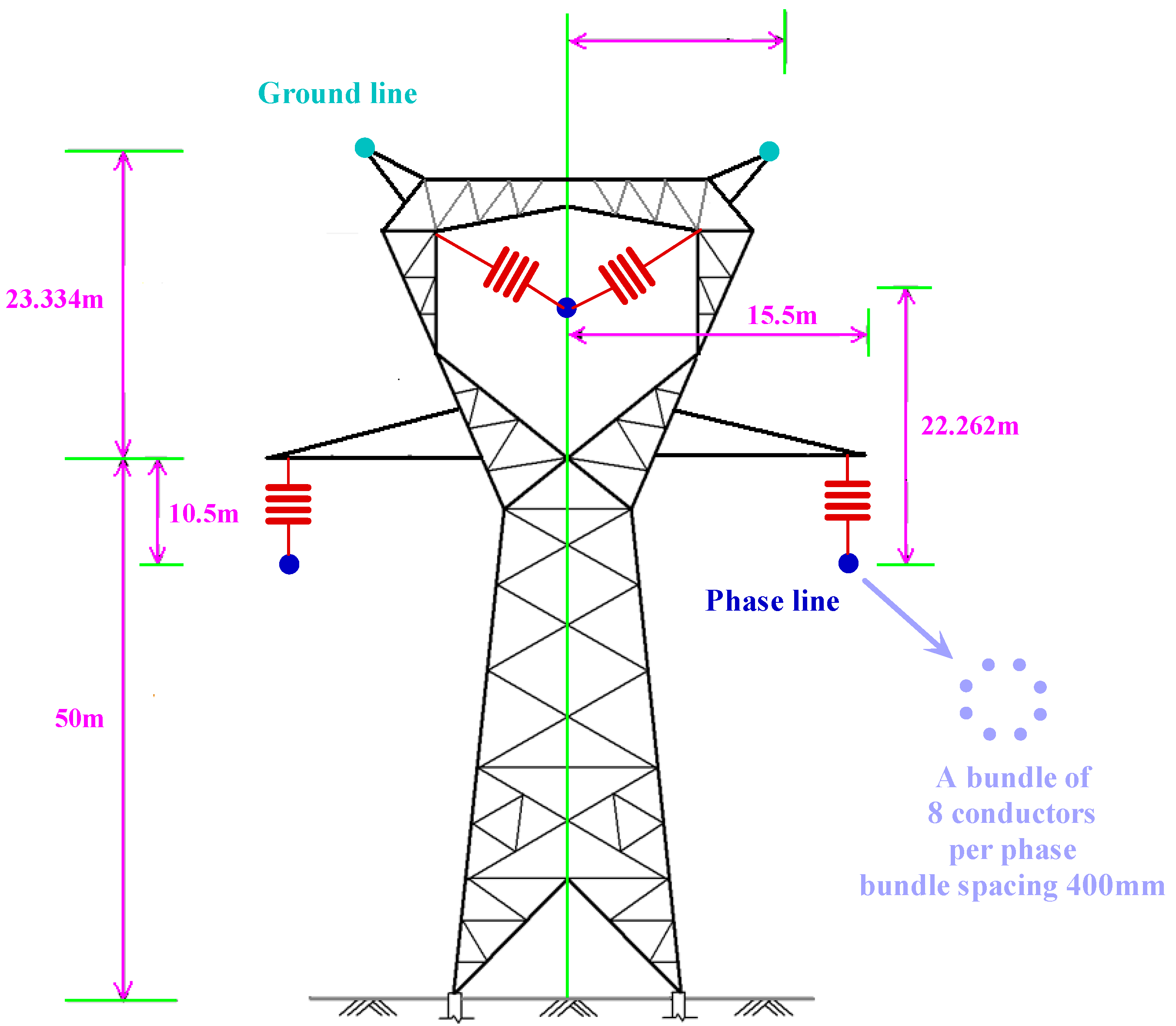
A schematic diagram of the simulation model is depicted in
Figure 5, while the tower shown in
Figure 3 is used to calculate the transmission line parameters. Two hundred doubly fed induction generators [
32] with 3 MW rated power and 25 m/s rated wind speed were considered for the wind farm, and were aggregated into an equivalent 600 MW generator in the model. The tower shown in
Figure 3 was used to calculate the transmission line parameters. Bus M and bus N represent the sending and receiving end of transmission lines, respectively.
Power Systems Computer Aided Design/Electromagnetic Transients including DC (PSCAD/EMTDC), an electromagnetic time-domain transient simulation environment created by Manitoba Hydro International with a library of preprogrammed models and a design editor for building custom models to satisfy various levels of different modelling demands, was adopted to construct a simulation model of HWTL with large-scale wind power integration; version 4.5 was used in this study [
33,
34,
35,
36,
37]. The simulation tests were implemented based on the PSCAD/EMTDC model, a general-purpose time-domain simulation tool for studying transient behavior of electrical networks. A single line diagram of the simulation model is provided in
Figure 6, and its parameters are given in
Table 1,
Table 2 and
Table 3.
The frequency-dependent model was employed to represent transmission lines in the simulation.
Table 4 shows the frequency-dependent parameters of transmission line when the fundamental frequency is 50 Hz, based on the tower shown in
Figure 3 [
38].
It can be seen in
Table 4 that the air mode wavelength is much larger than earth mode due to the differences between air modal circuit and earth modal circuit, hence the open-phase operation and unbalanced ground fault can induce quite different voltage distributions in air modal circuit and earth modal circuit.
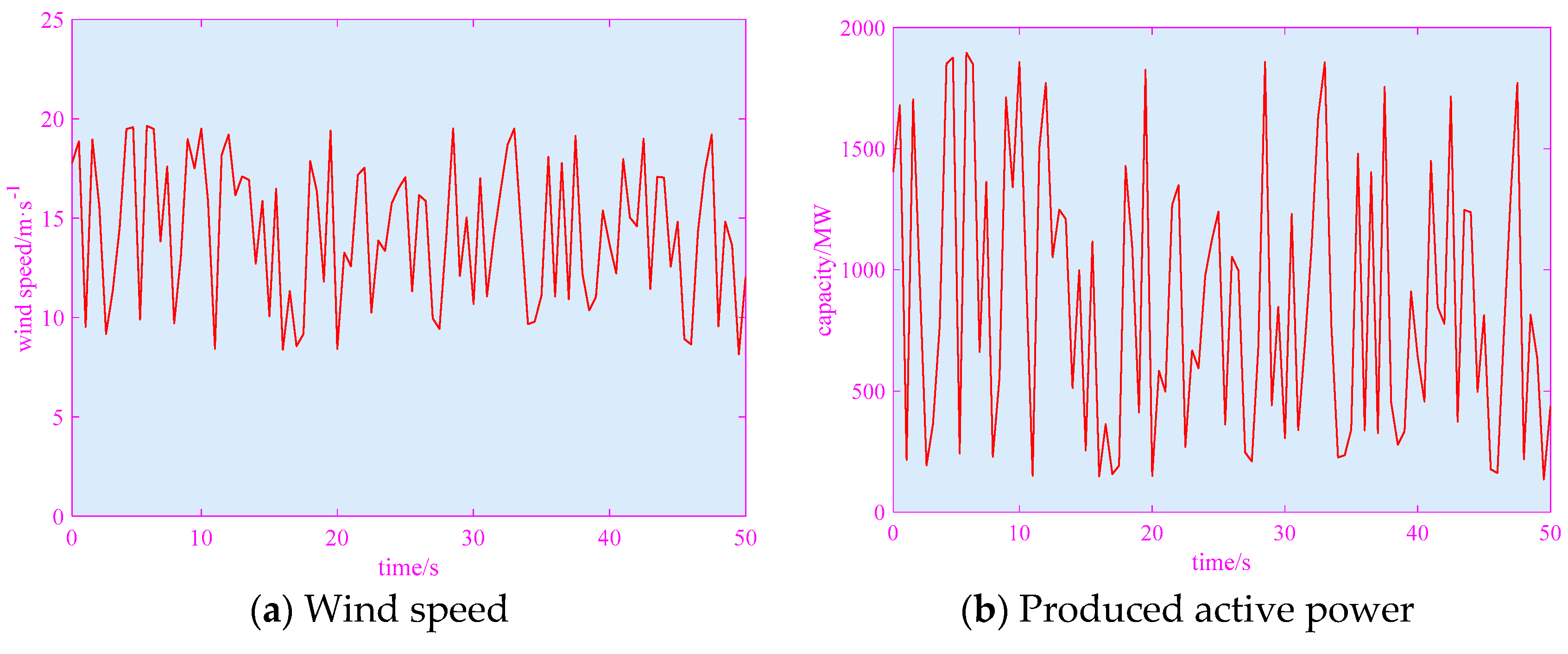
Normally, wind farms are required to achieve maximum power point tracking to track the optimal active power curve, which is obtained by connecting each maximum power point at various wind speeds with the optimal active power curve determined by
where
denotes the shape coefficient of optimal active power,
R is the blade radius of the wind turbine,
ρ is the air density, the optimal tip-speed ratio
, and the maximum power coefficient
[
33].
Hence, the power generated from the wind farm usually has a highly stochastic pattern, which will be injected into the main power grid [
31].
Figure 7a,b demonstrate the wind speed and produced active power of the wind farm, respectively.
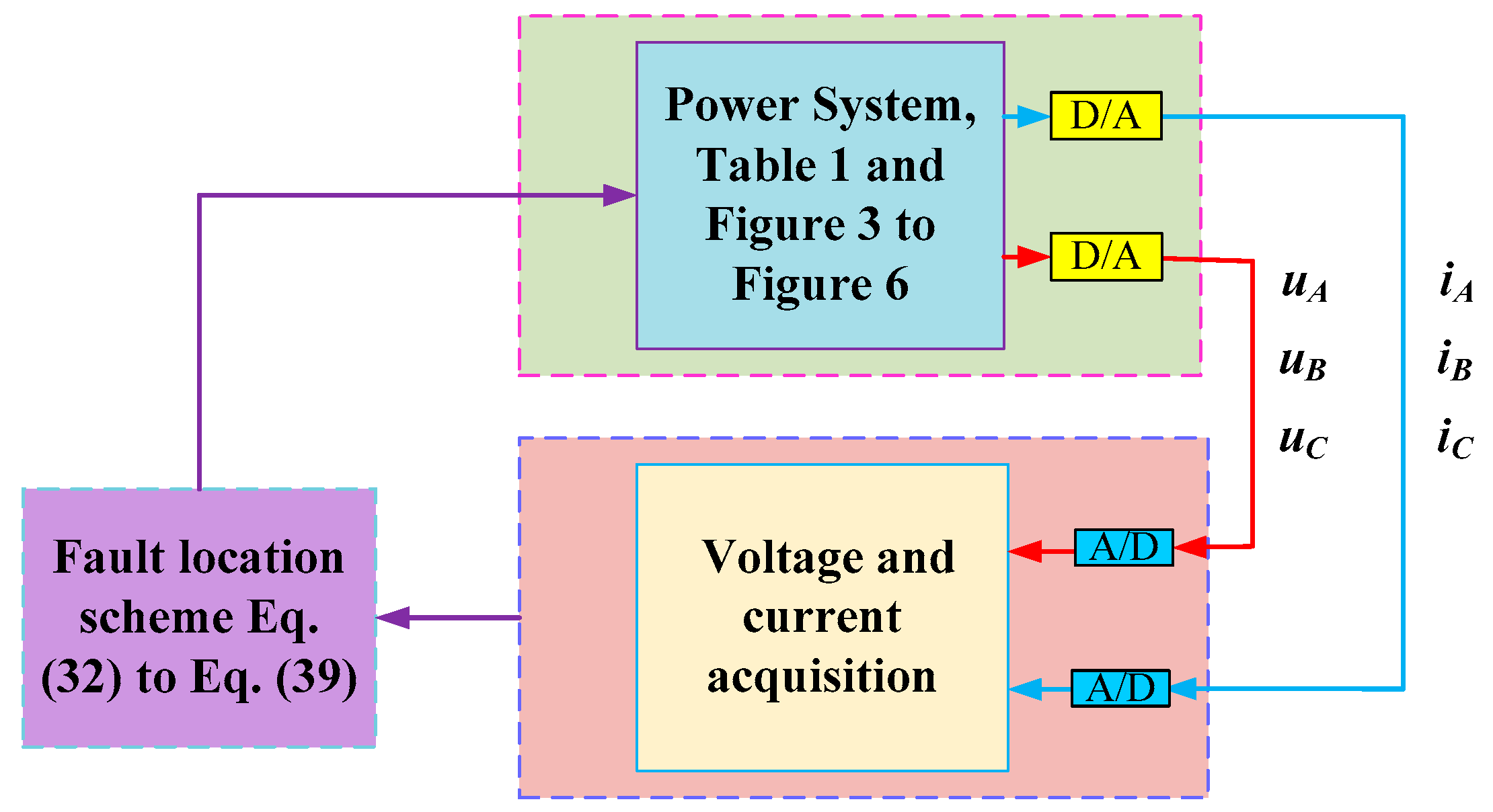
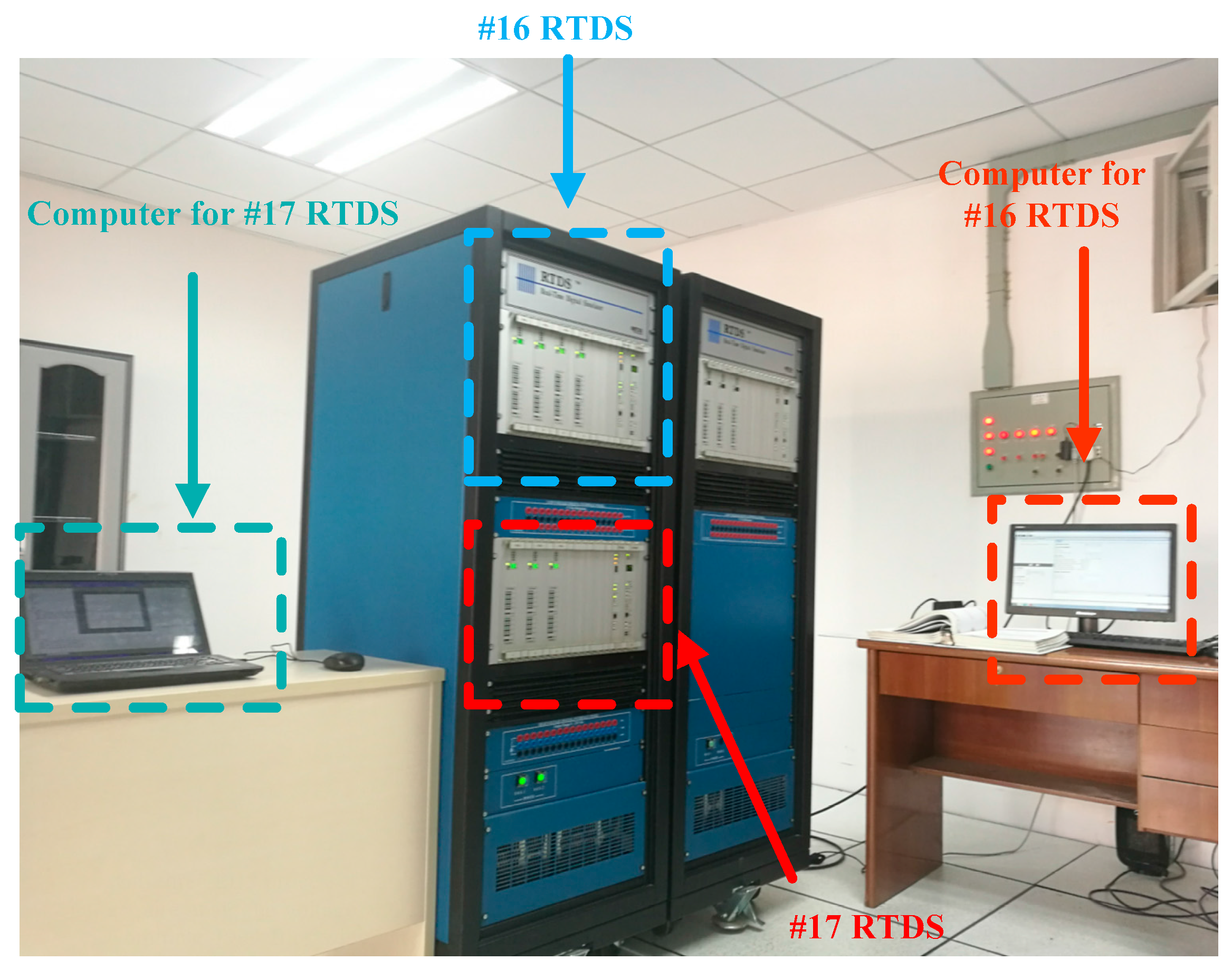
The hardware-in-the-loop (HIL) test is a powerful and important technique that has been used worldwide in real-time experiments instead of practical experiments due to the complexity and large scale of real power systems. The Real-Time Digital Simulator (RTDS), which is capable of closed-loop testing of protection and control equipment, was adopted in this study to further validate the feasibility of hardware implementation. The configuration and experimental platform of HIL test are provided in
Figure 8 and
Figure 9.
A power system with a sampling rate of 20 kHz was implemented by #16 RTDS with four PB5 processor cards and one gigabit transceiver analog output card, which can output the voltage and current at bus M and bus N. Meanwhile, #17 RTDS with three PB5 processor cards and one gigabit transceiver analog input card was applied as an acquisition device with 10 kHz to acquire voltage and current output from #16 RTDS. The voltage and current acquired by #17 RTDS was transferred to digital data and stored in RTDS as Common format for Transient Data Exchange (COMTRADE) 1999 files, which were then transmitted to a PC with an IntelR Core™ i3 CPU at 2.52 GHz and 3 GB of RAM. Finally, the voltage and current waveforms were decoded from COMTRADE 1999 files in the PC to locate fault points by the proposed MVD-ADFL.
Denoting the fault distance as
xfault, the relative fault location calculation error
ε is defined as
where
l is the total length of fault line and
xf is the fault location result.
5.2. Single Phase-to-Ground Fault
A phase-to-ground (AG) fault with 200 Ω fault resistance, 2400 km away from bus M, which occurred at 10 s with a total wind power of 180 MW, was investigated by simulation and HIL test. The calculated voltage distribution along transmission lines from bus M and bus N are shown in
Figure 10.
There are two intersection points calculated by air mode and three intersection points calculated by earth mode voltage distribution in the PSCAD simulation and the HIL test, as shown in
Figure 10. In the PSCAD simulation, 2365 km and 2249 km in air mode and 2365 km in earth mode satisfy Equation (34), thus the fault location result is
In the HIL test, only 2425 km in air mode and 2374 km in earth mode satisfy Equation (34), and the fault location result is
The fault location results of simulation and HIL tests are tabulated in
Table 5.
It can be clearly seen that the voltage distribution along transmission lines of HIL is almost the same as the that of the simulation, therefore the fault location results of the simulation and the HIL test are similar. The errors of fault location results based on the simulation and the HIL test are 2.46% and 0.33%, respectively.
5.3. Phase-to-Phase Fault
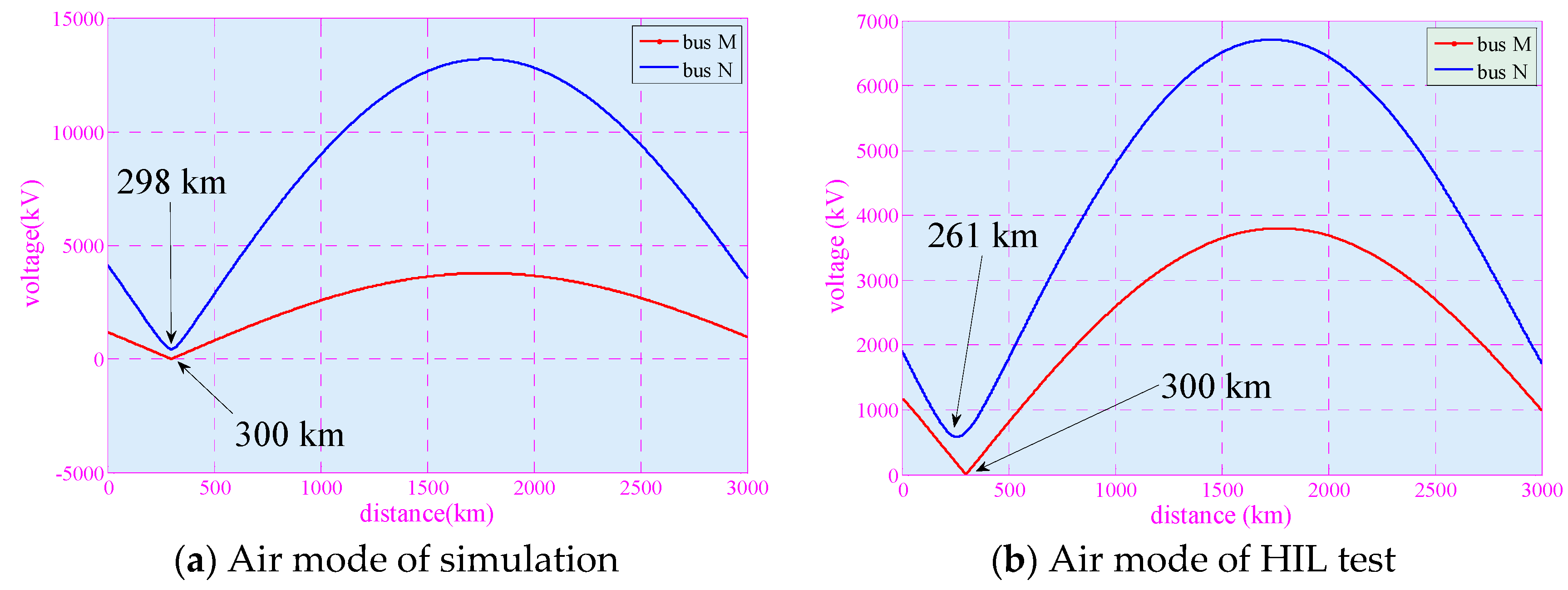
A phase-A-to-phase-B (AB) fault with 10 Ω fault resistance, 300 km away from bus M, which occurred with 210 MW wind power at 20 s, was investigated. The calculated voltage distributions along transmission lines from bus M and bus N are given in
Figure 11.
The AB fault point is nearly ideal, thus the minimums of air modal and earth modal voltage distribution along transmission lines are similar. In the PSCAD simulation, 300 km and 298 km are the minimum in air mode, hence the fault location result is
In the HIL test, 261 km and 300 km are the minimum in air mode, and the fault location result is
Table 6 demonstrates the fault location results of the simulation and the HIL tests.
The AB fault point is a nearly ideal boundary for the air mode circuit containing phase A and phase B, thus the minimums of air modal and earth modal voltage distribution along transmission lines are similar. The fault location error of the simulation is 0.00 and of the HIL test is 0.20. Even though the error of the HIL test is larger than that of the simulation, it is acceptable.
5.4. Double Phase-to-Ground Fault
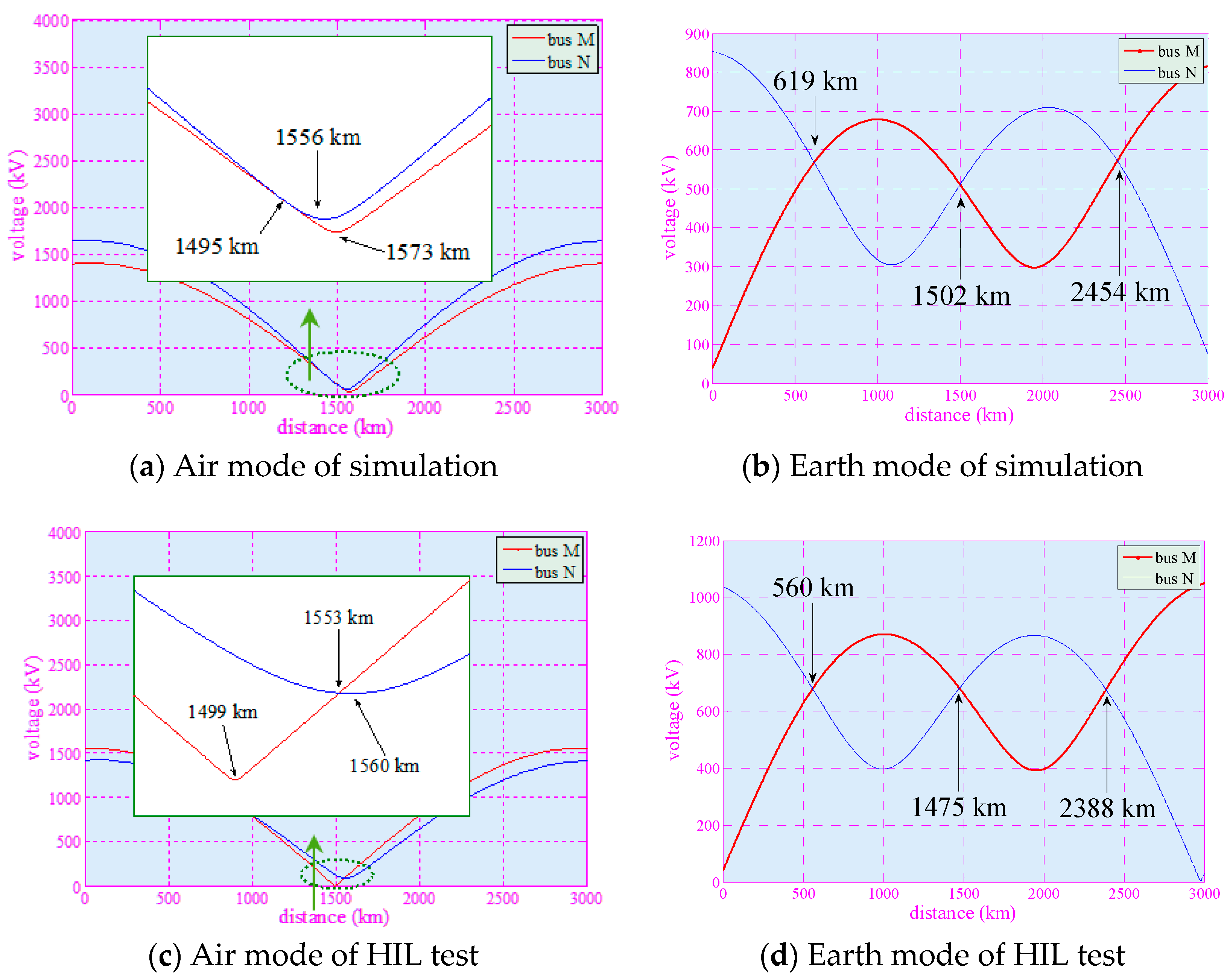
A double phase-to-ground (ABG) fault with 50 Ω fault resistance, 1500 km away from bus M was studied, while fault occurred at 30 s with 400 MW produced wind power. The calculated voltage distributions along transmission lines from bus M and bus N are presented in
Figure 12.
Here, both the intersection points and minimum method can be applied for fault location estimation of ABG fault. In the PSCAD simulation, the intersection point in air mode, 1495 km, and minimums, 1556 km and 1573 km, are all close to 1502 km, one of the intersection points in earth mode voltage distribution, therefore the fault location result is
In the HIL test, the intersection point in air mode is 1553 km and the minimums are 1499 km and 1560 km. The fault location result is
The fault location results of the simulation and the HIL tests are illustrated in
Table 7.
Here, both the intersection points and minimum method can be applied for fault location estimation. Lastly, the fault location results of the simulation and the HIL test are almost the same, and fault location errors are both 1.76%.
5.5. Three-Phase Fault
A three-phase (ABC) fault with 10 Ω fault resistance, 1800 km away from bus M, was simulated at 50 s, with 550 MW produced wind power. The calculated voltage distribution along transmission lines from bus M and bus N are illustrated in
Figure 13, and the fault location estimations are provided in
Table 8.
Only minimums of voltage distributions are applied in this case, but all the minimums are close to the fault point. In the PSCAD simulation, the minimums are 1788 km and 1809 km, so the fault location result is obtained as
In the HIL test, the minimums are 1741 km and 1799 km, and the fault location result is
The fault location results of the simulation and the HIL test can be found in
Table 8.
The minimums of air voltage distributions are similar in the simulation and the HIL test, so the minimums are applied to estimate the fault location. The fault location error of the simulation is just 0.03%, which is smaller than that of the HIL test; however, the fault location error of the HIL test is just 1.17% and acceptable in the practical implementation.
Comprehensive simulations and HIL tests in the presence of different fault distances, resistances, types, and wind power penetration were carried out to fully verify the effectiveness of MVD-ADFL, which are only summarized in
Table 9 due to page limits.
Due to the ideal boundary formed by at least two conductors in the case of air mode of AB and ABC, the MVD-ADFL fault location results of AB and ABC faults are better than those of AG and ABG faults. Additionally, HIL tests and PSCAD simulation are based on different electromagnetic transient program engines, thus some fault location results of HIL tests are even better than those of the PSCAD simulation. Considering the inevitable high-frequency noise in the data acquisition of HIL tests, the good performance of MVD-ADFL in HIL tests indicates that the proposed fault location method is not sensitive enough to the high-frequency noise in the voltage and current waveforms.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}