Power Management of Islanded Self-Excited Induction Generator Reinforced by Energy Storage Systems



Abstract
:1. Introduction
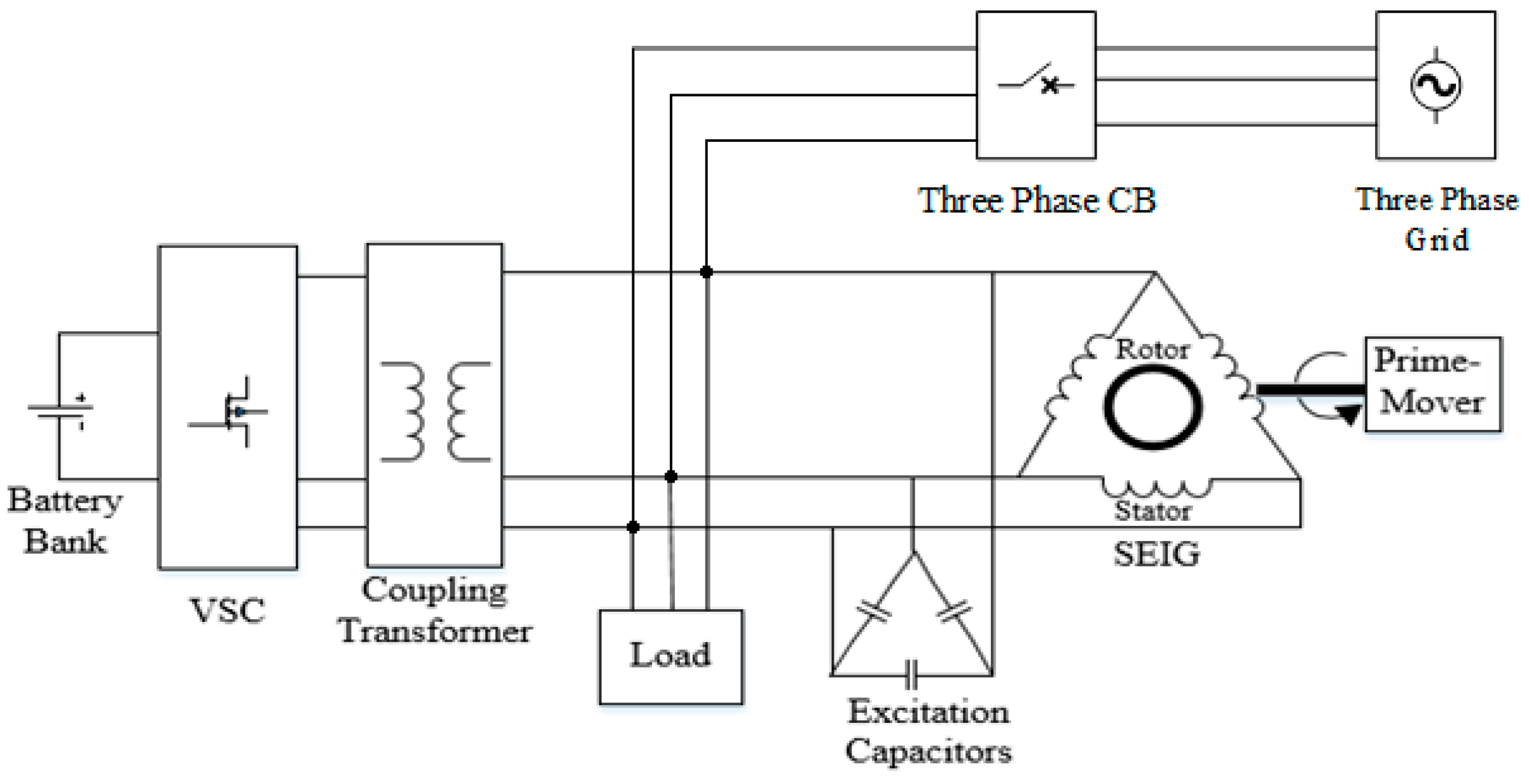
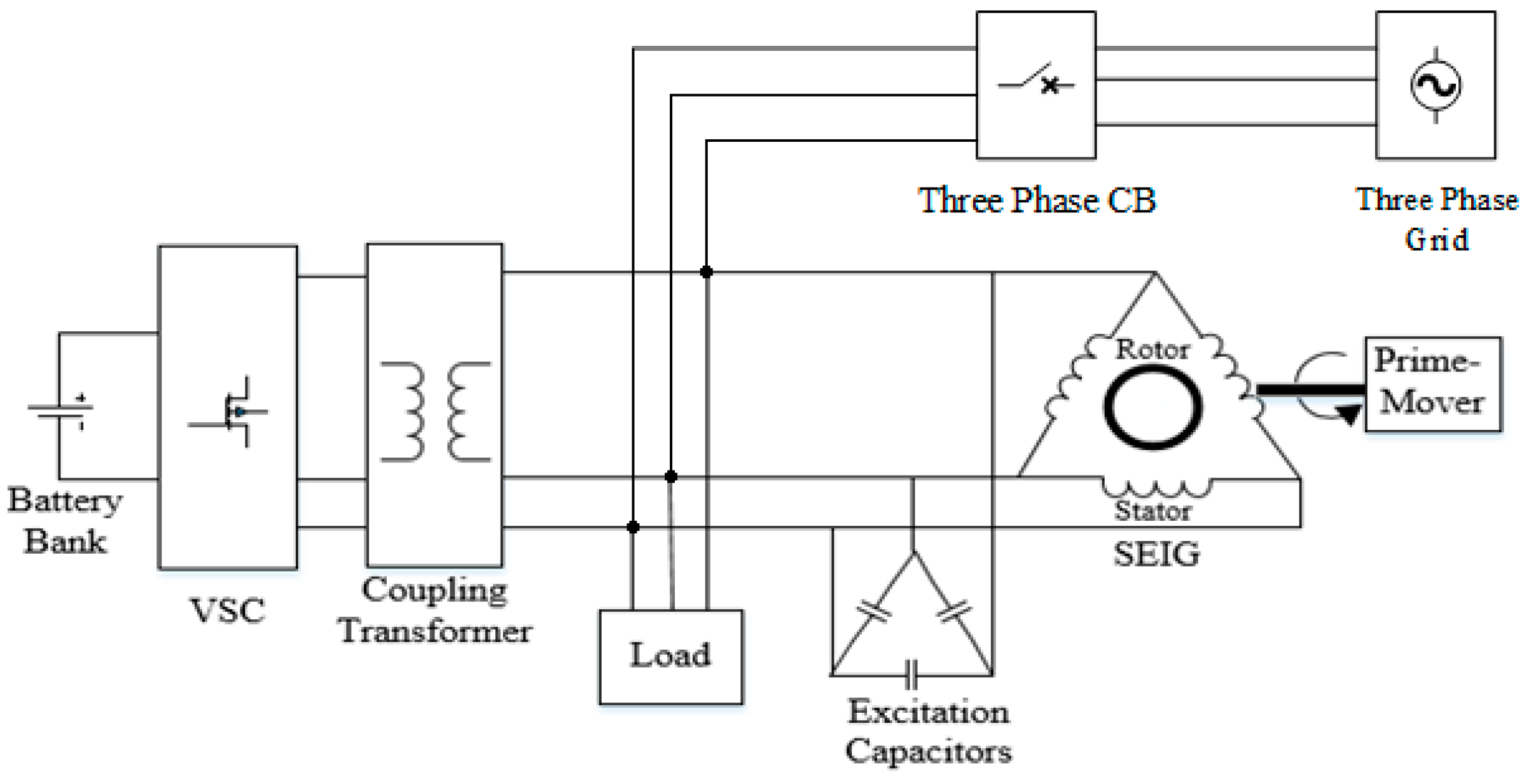
2. Islanded System Operation
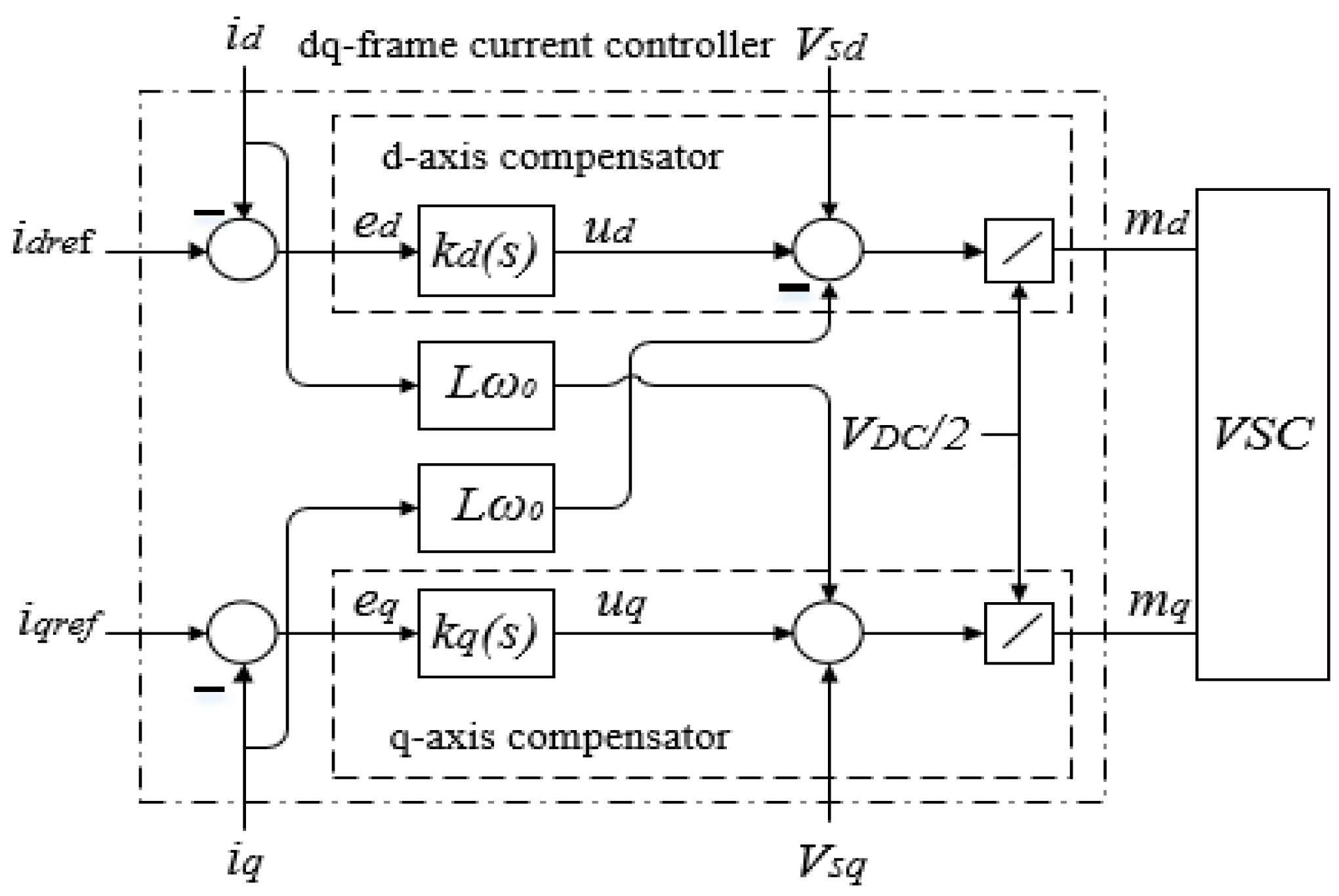
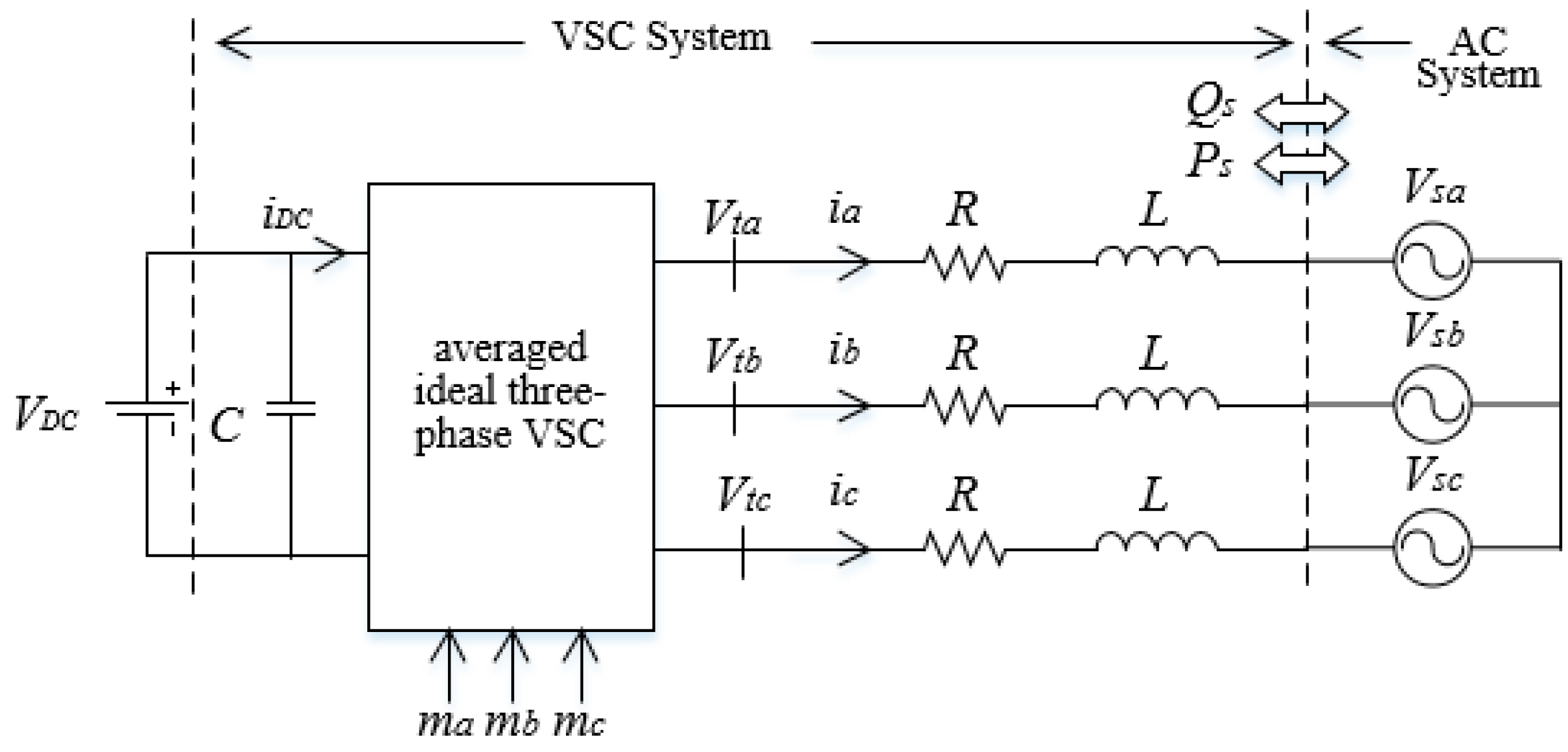
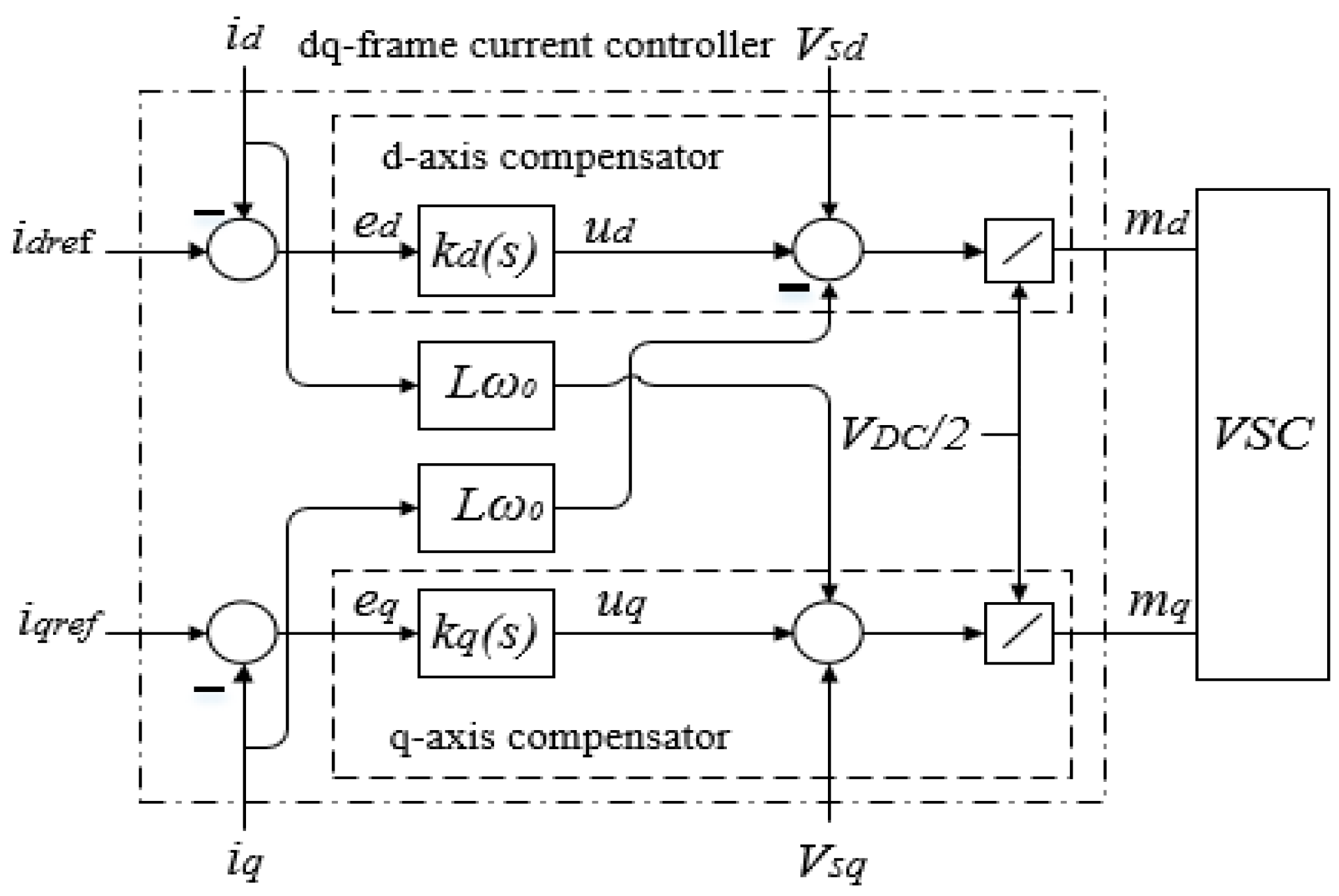
3. VSC System Modelling
- L: the inductance between the converter and the coupling point.
- R: the sum of the resistance between the converter and the coupling point and the VSC internal resistance.
- : the steady state AC source frequency.
- : the respective current components in the d-q-frame.
- : the respective VSC terminal voltages in the d-q-frame.
- : the respective AC system voltage in the d-q-frame.
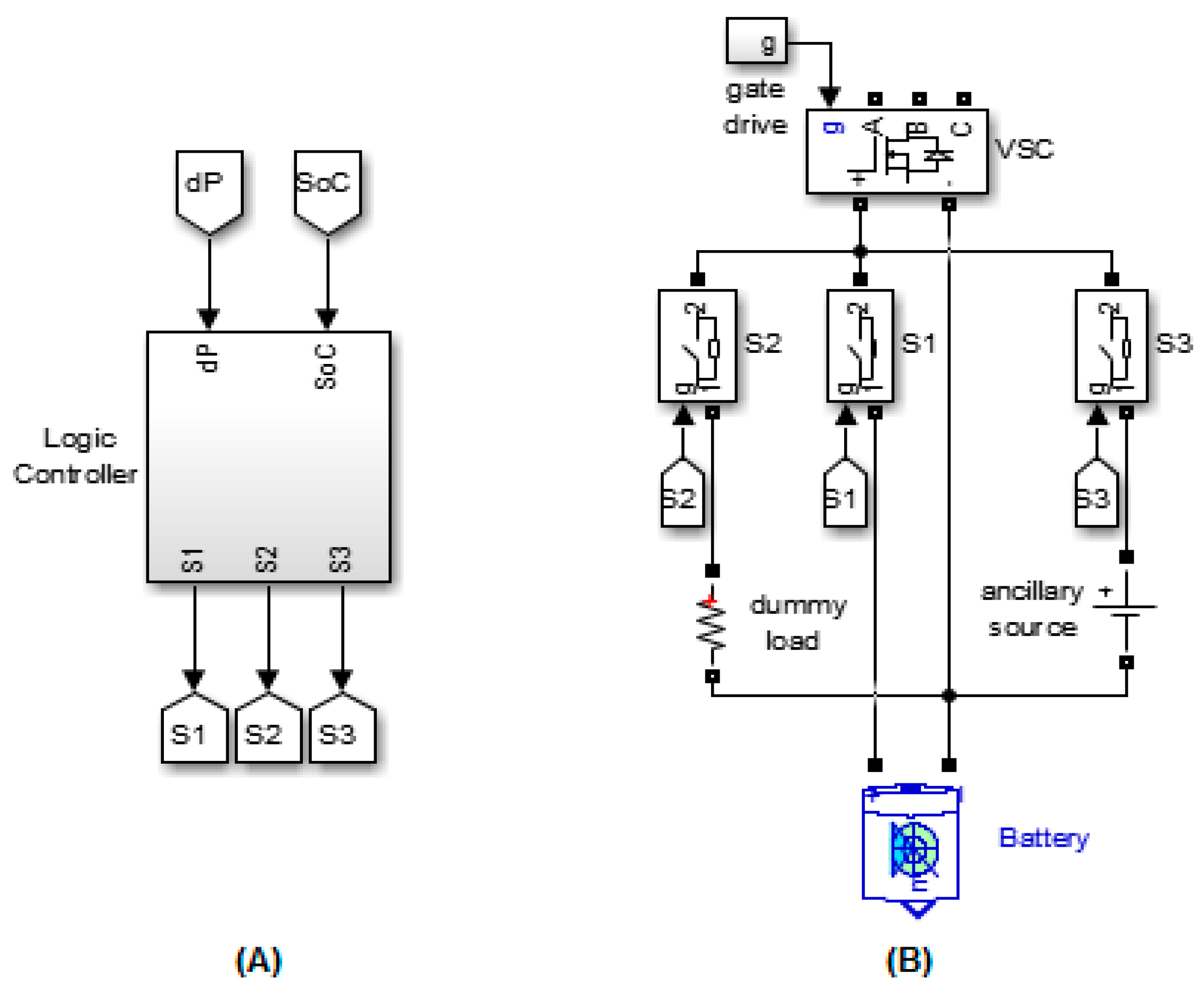
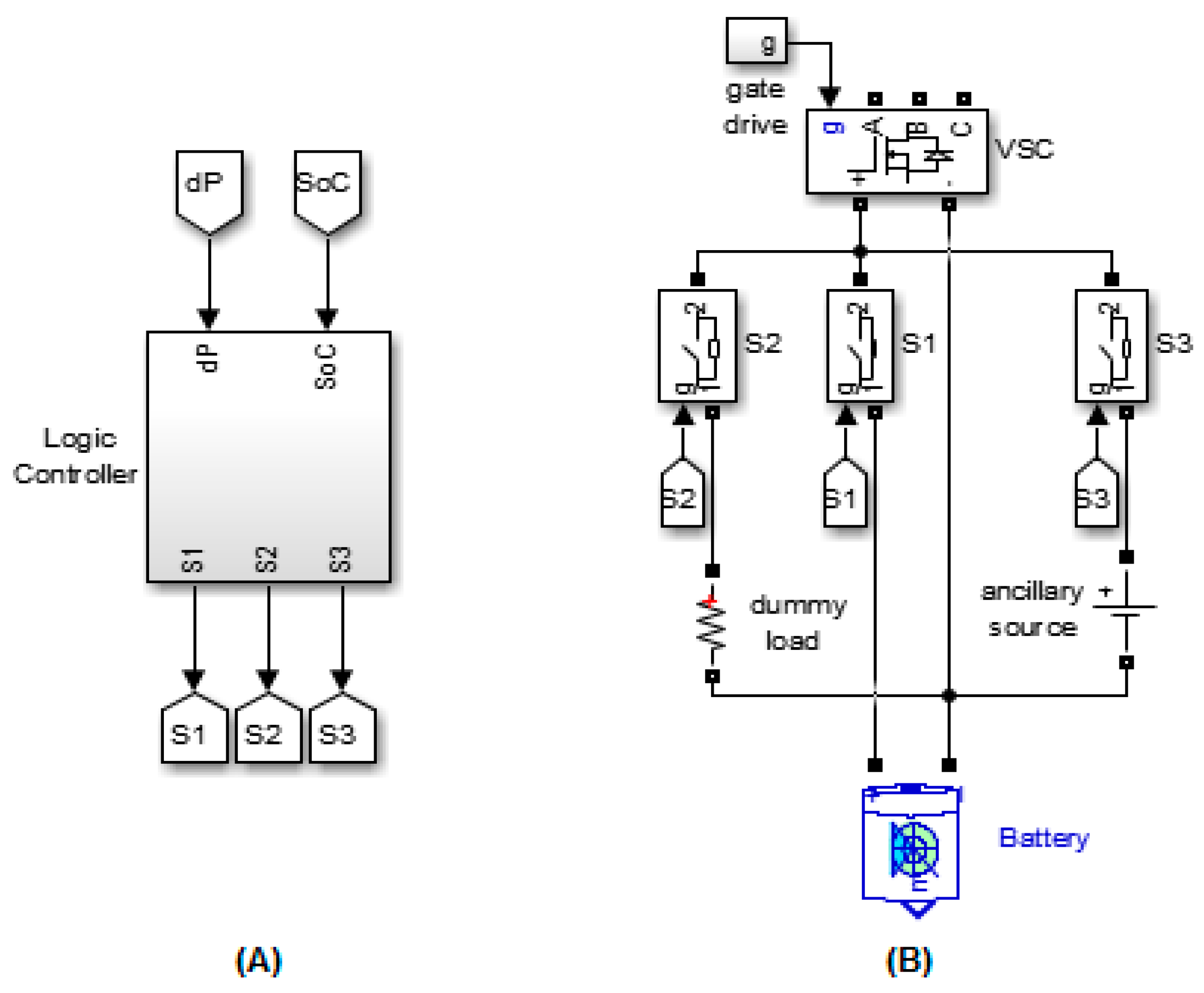
4. Control and Working Principle
5. System Simulation
- Scenario 1:
- variation of load’s active power, battery SoC within limits;
- Scenario 2:
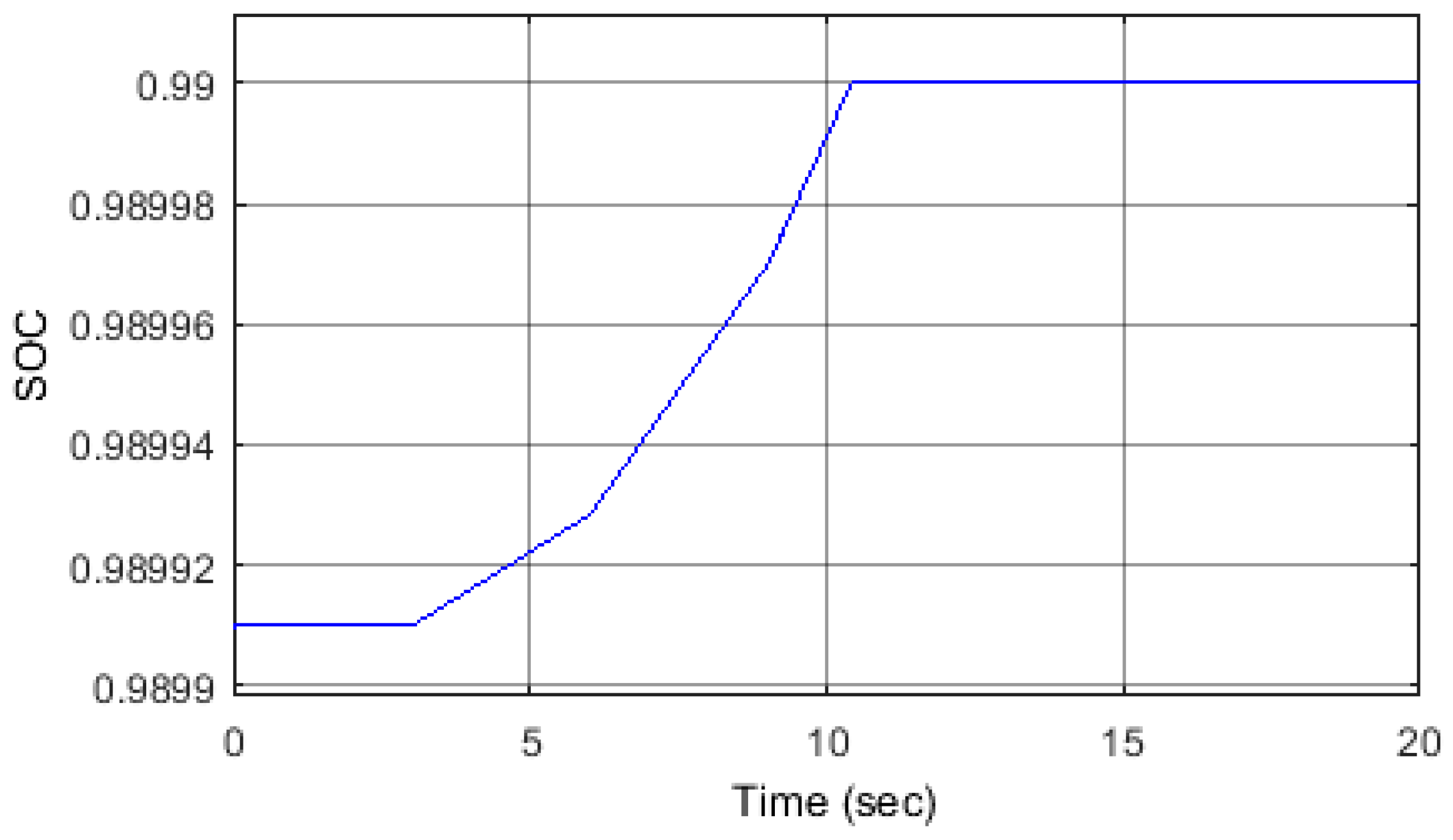
- changes in load’s active and reactive power, battery SoC reaches its maximum level;
- Scenario 3:
- changes in load’s active and reactive power, battery SoC reaches its minimum level.
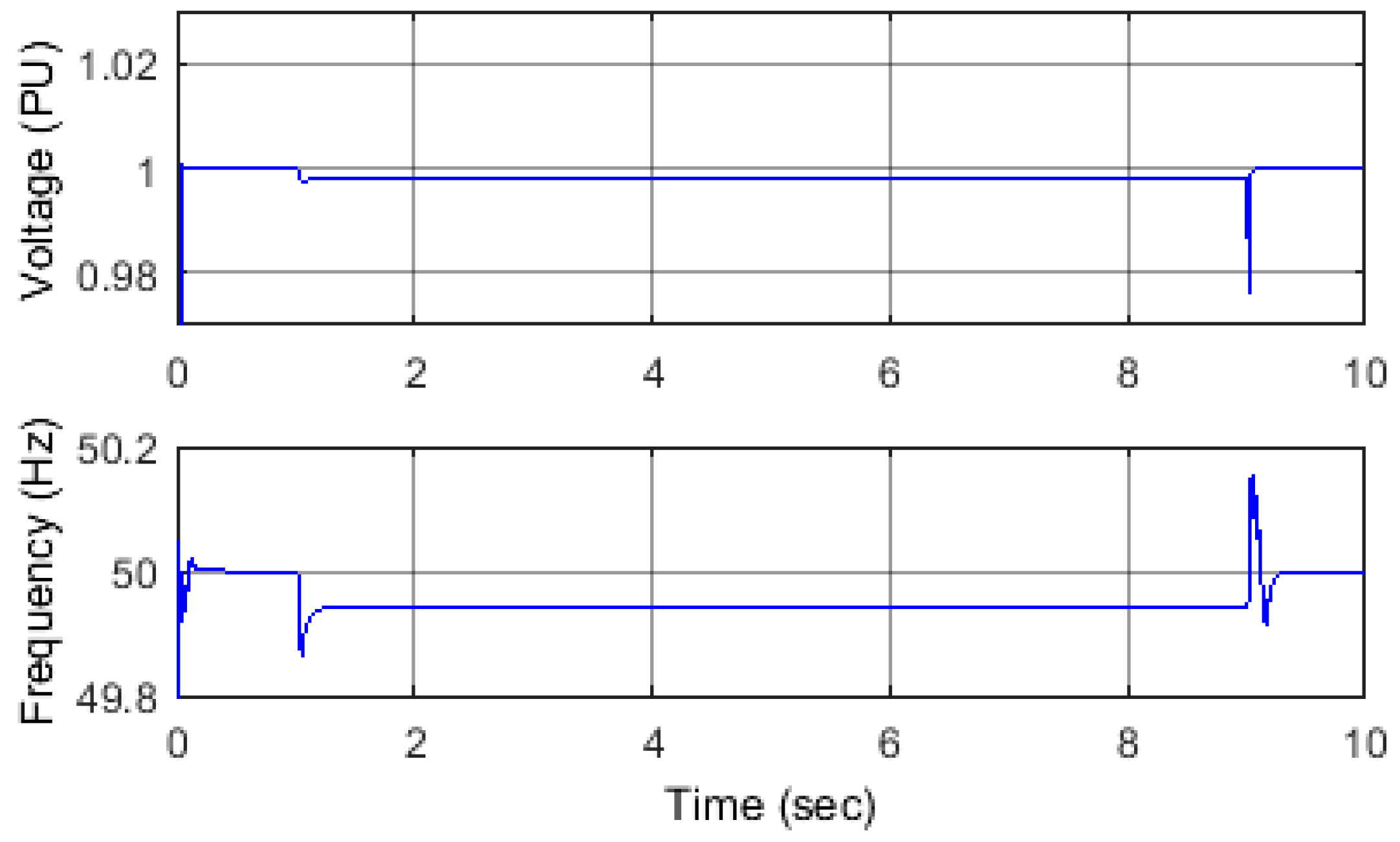
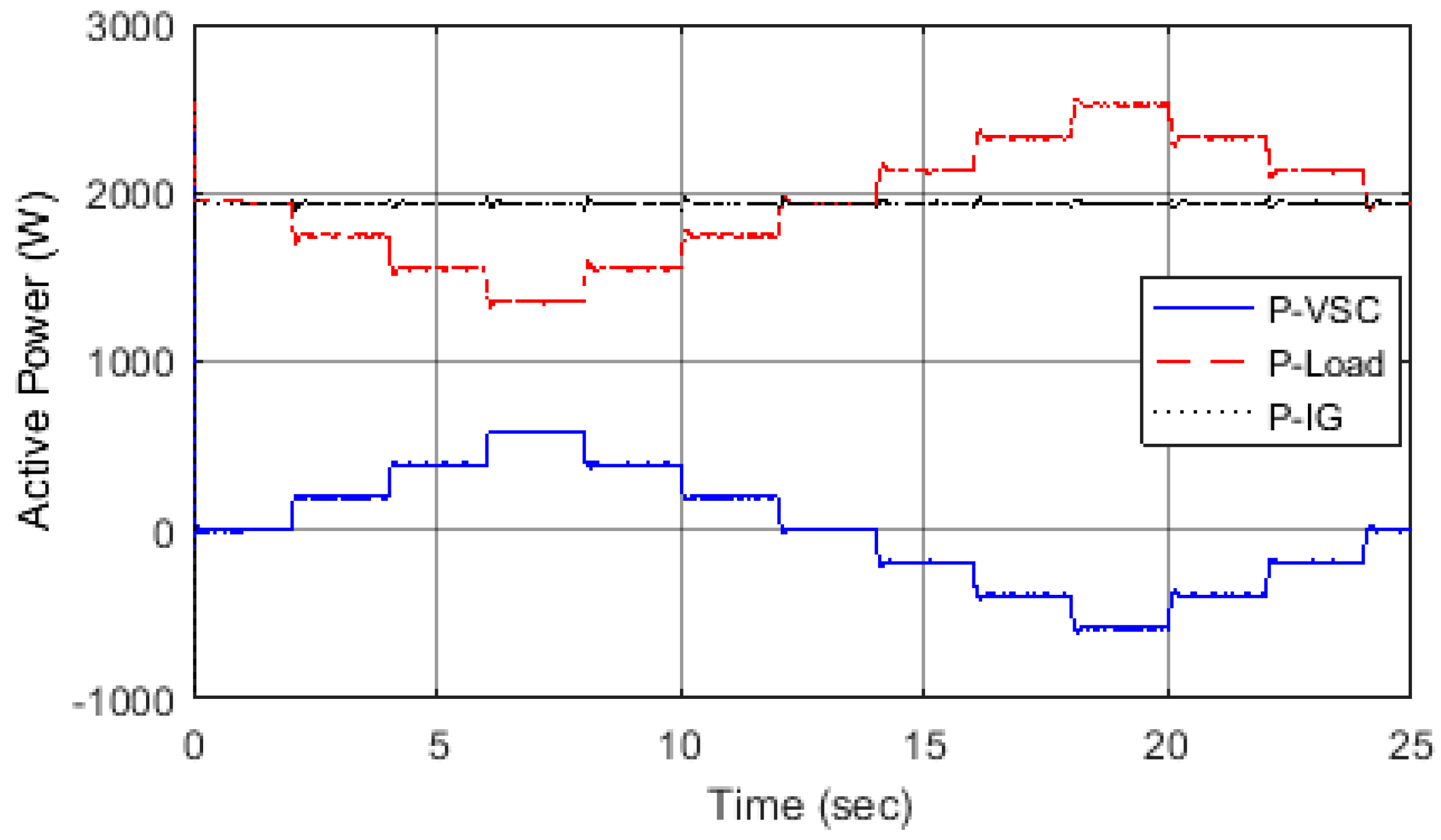
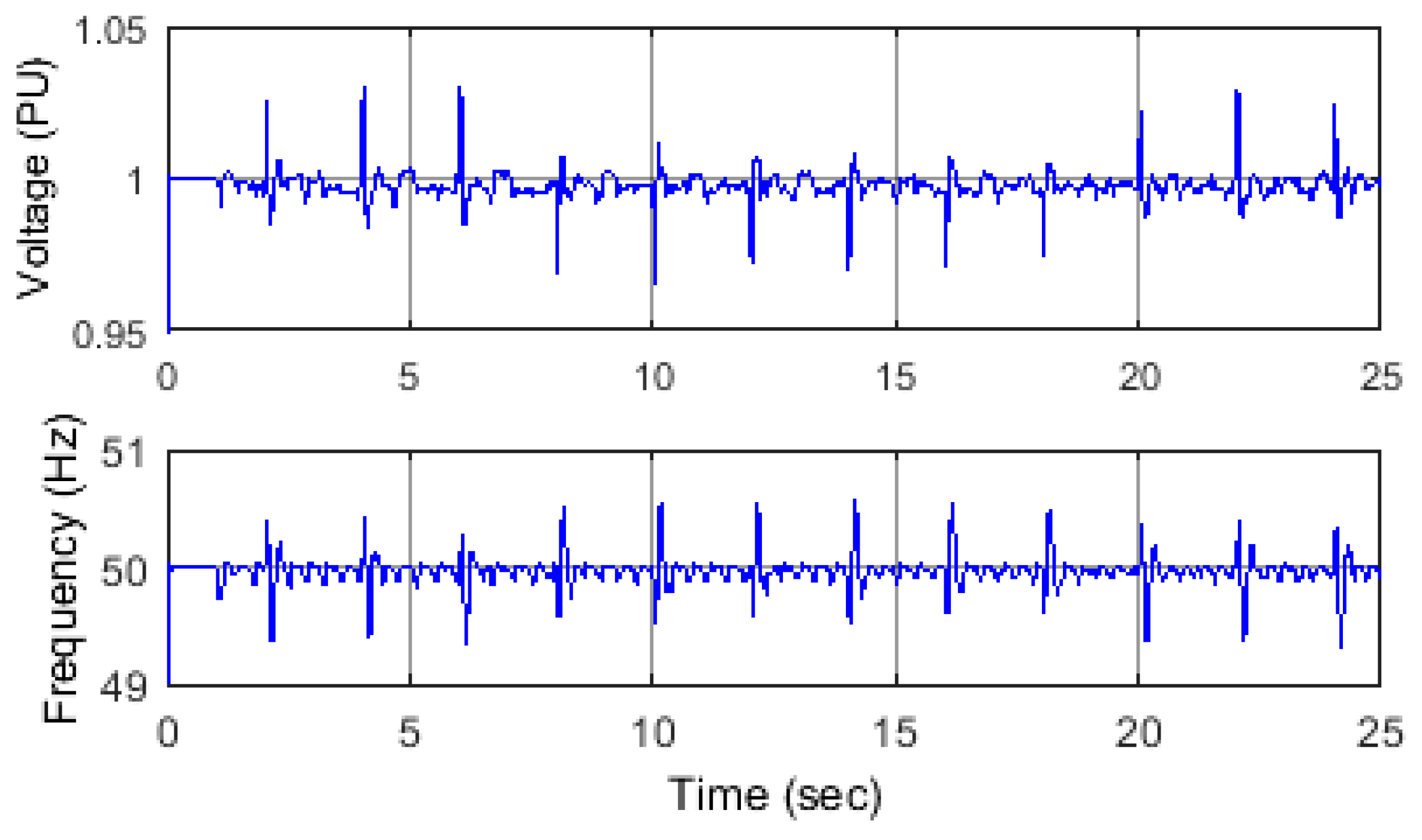
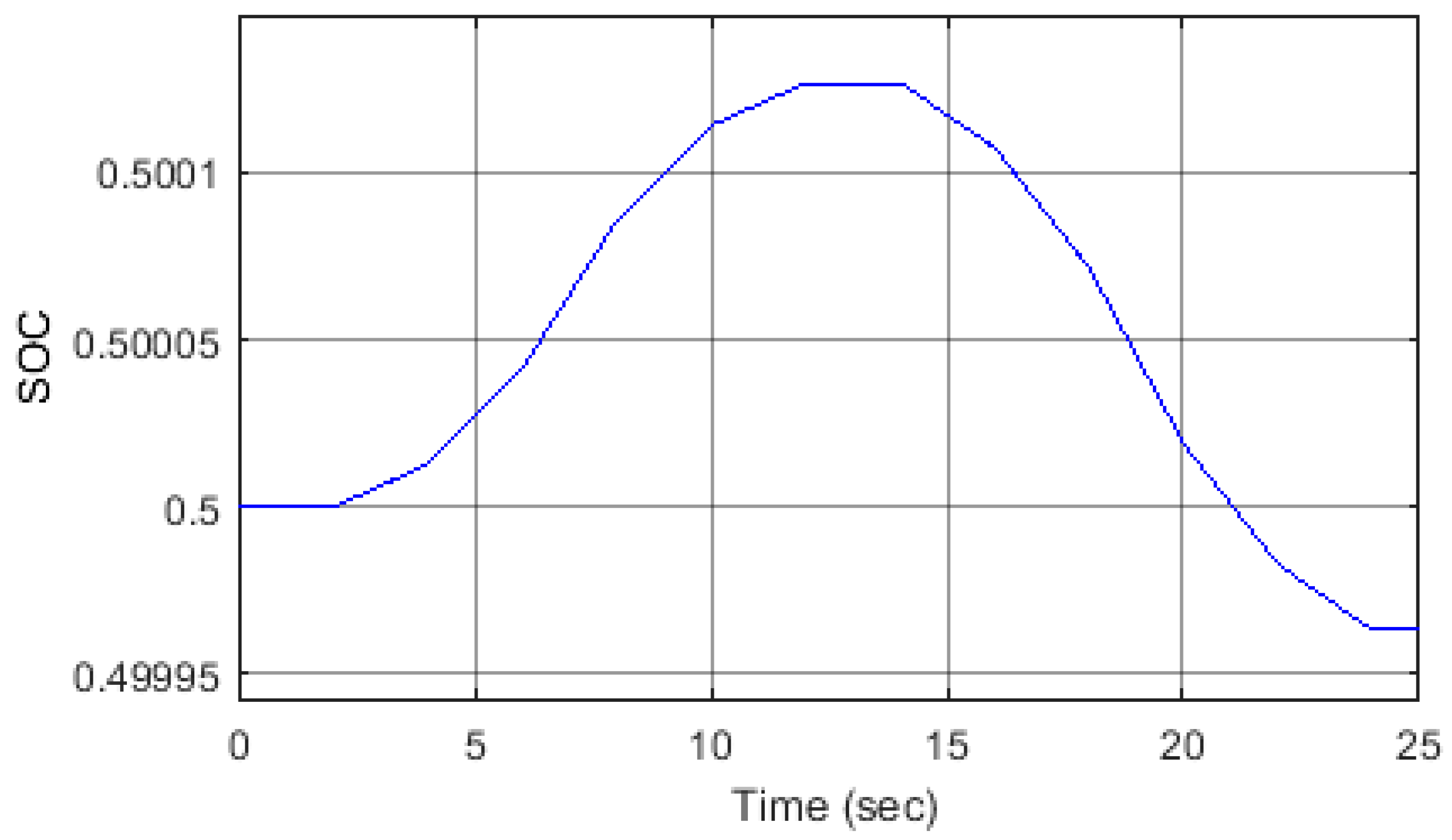
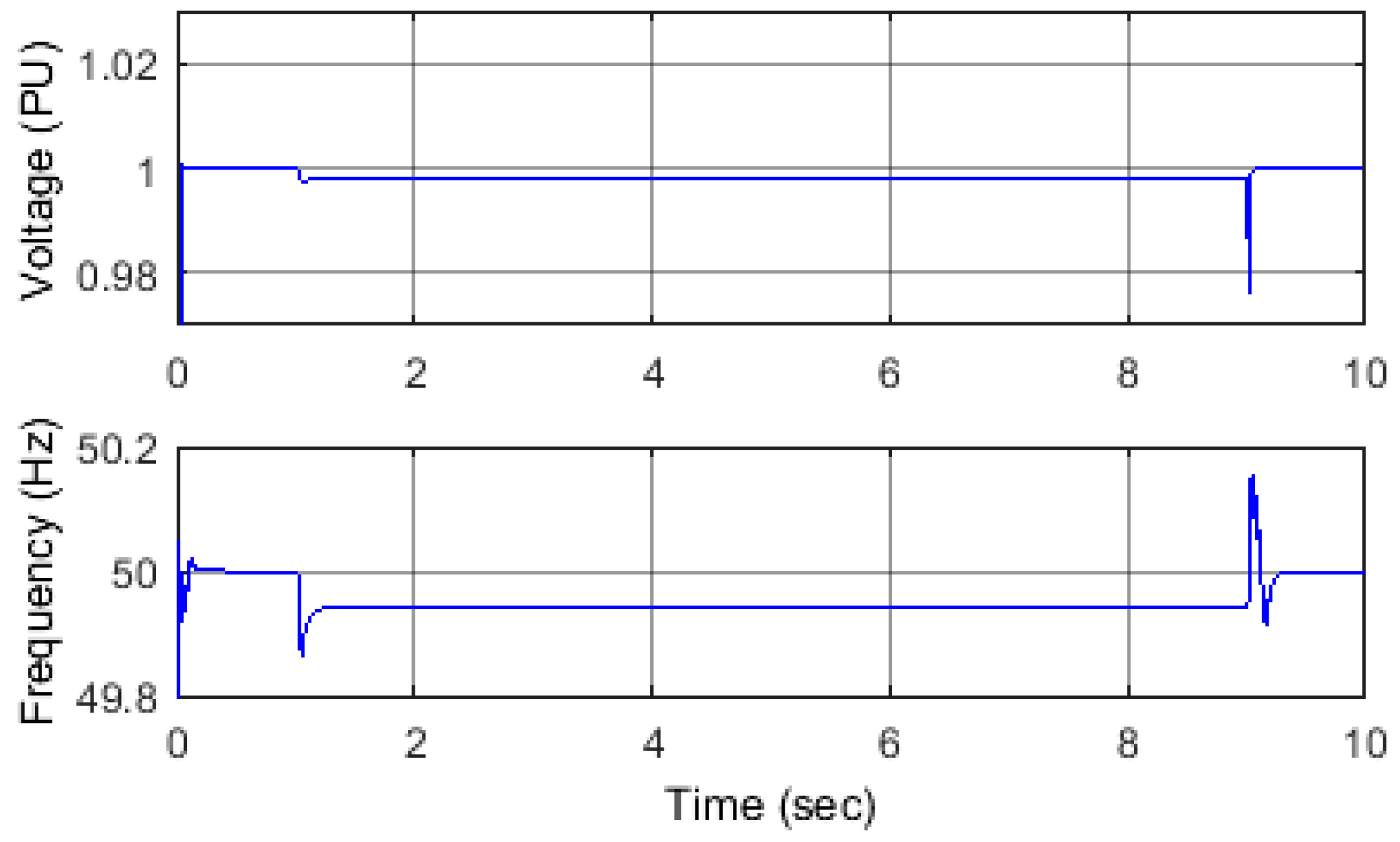
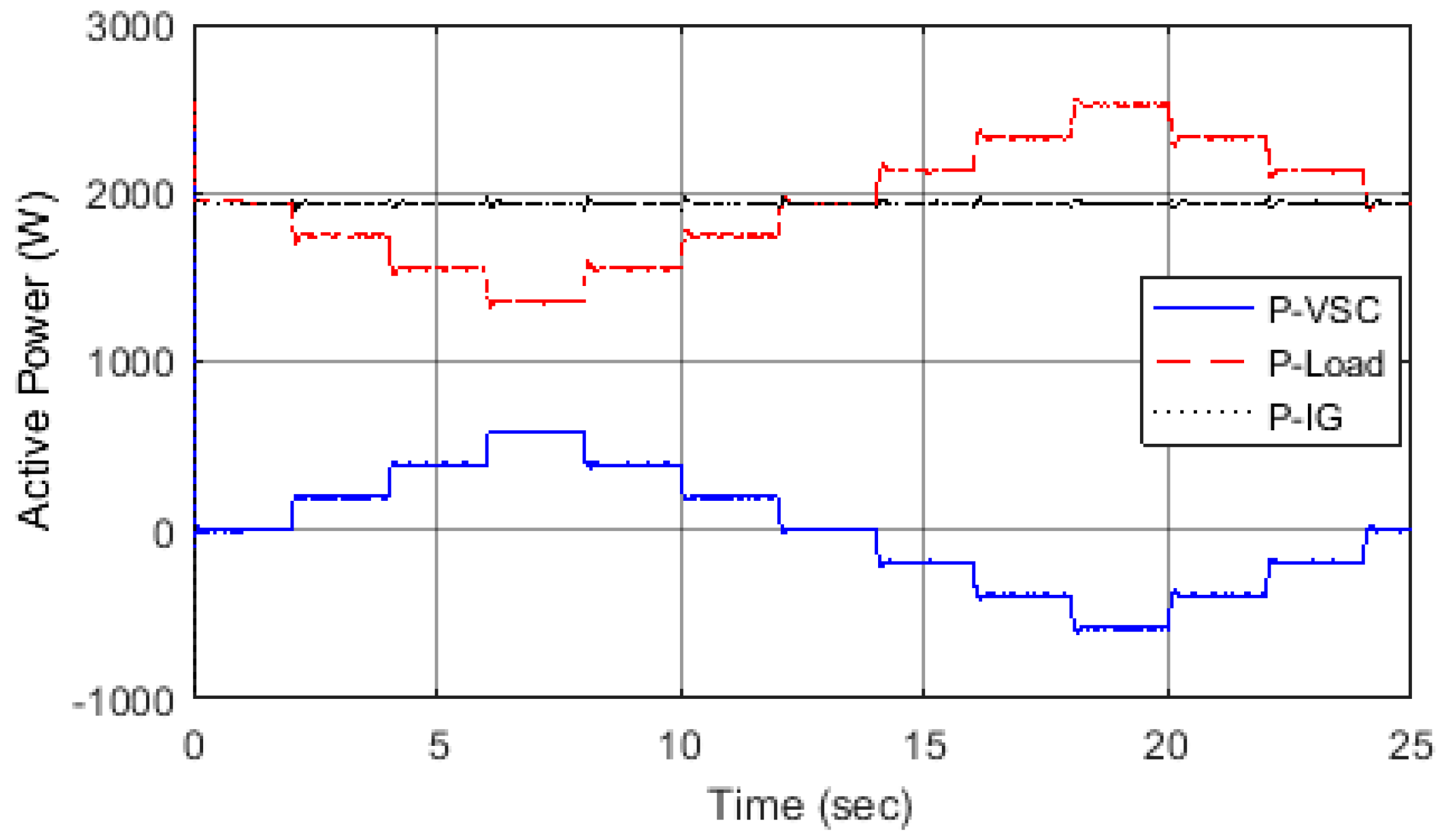
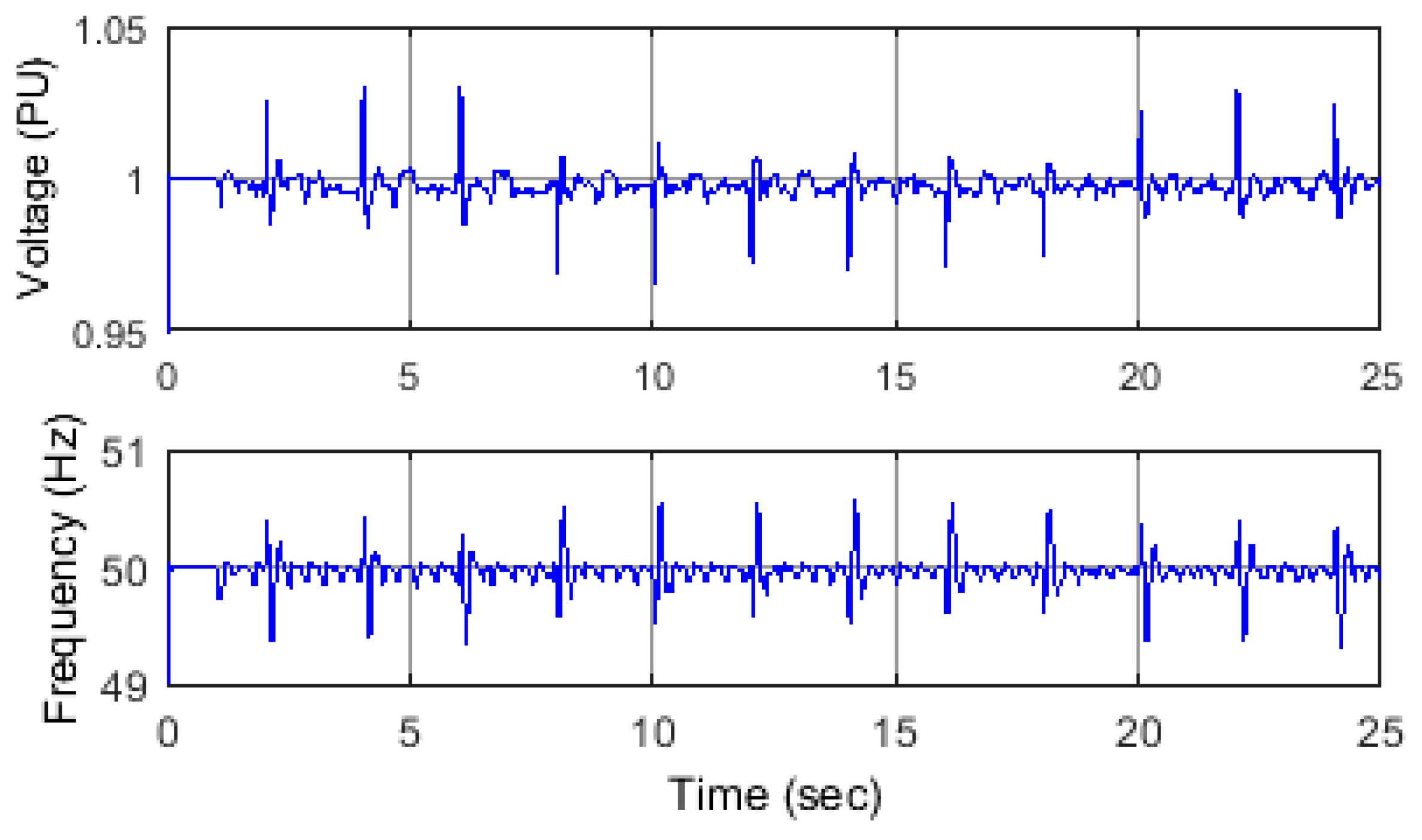
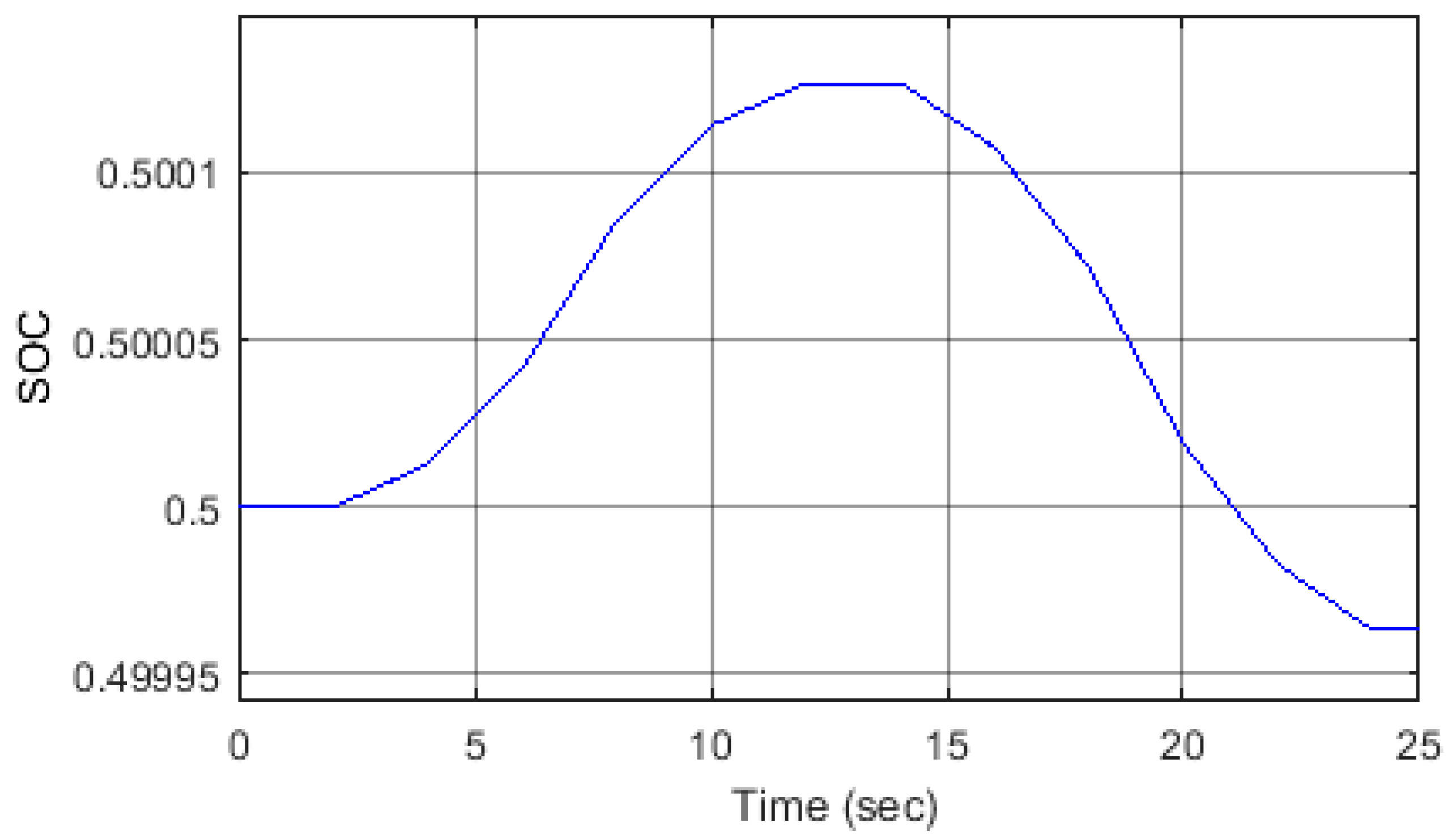
5.1. Scenario 1: Variation of Load’s Active Power
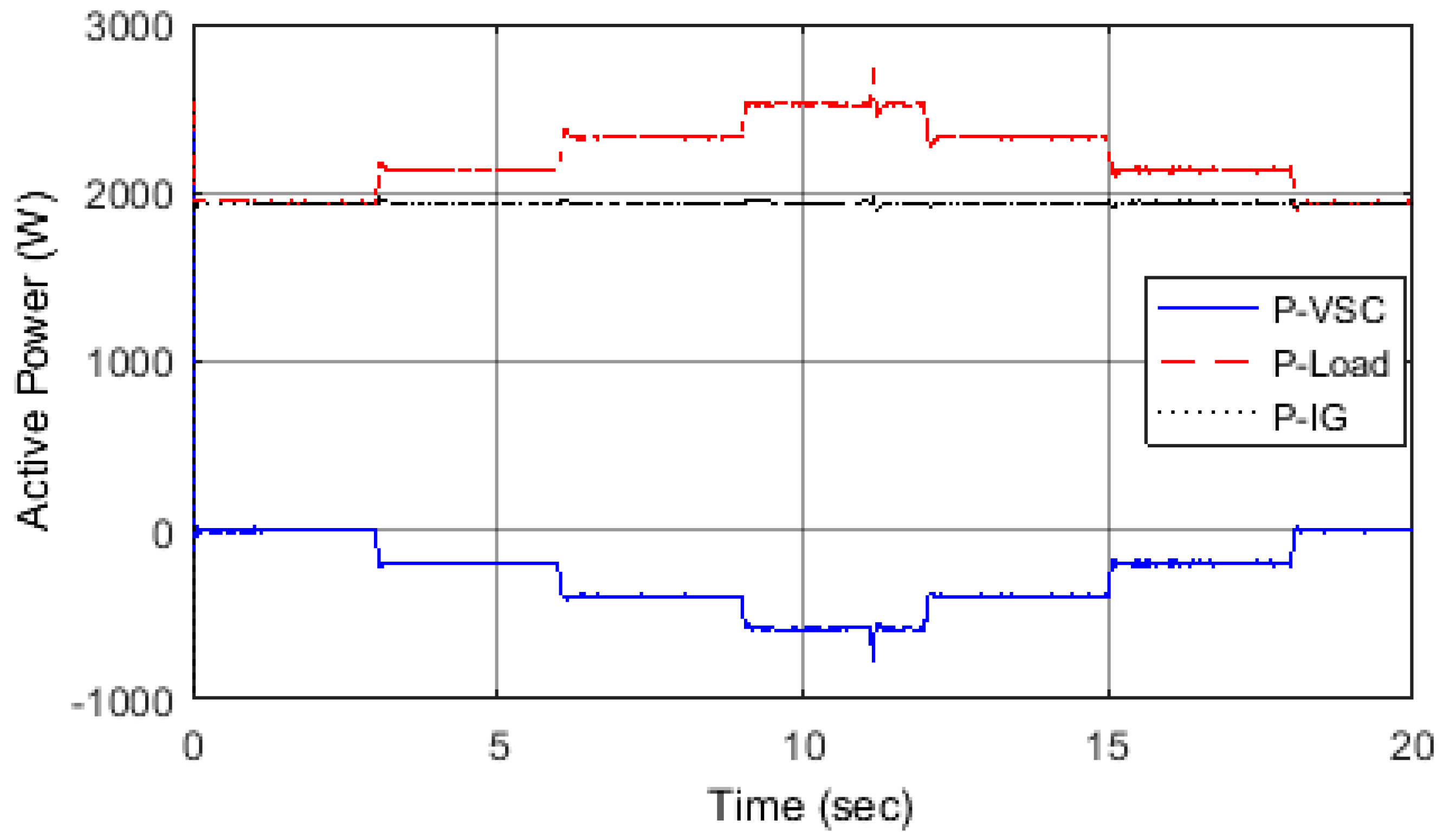
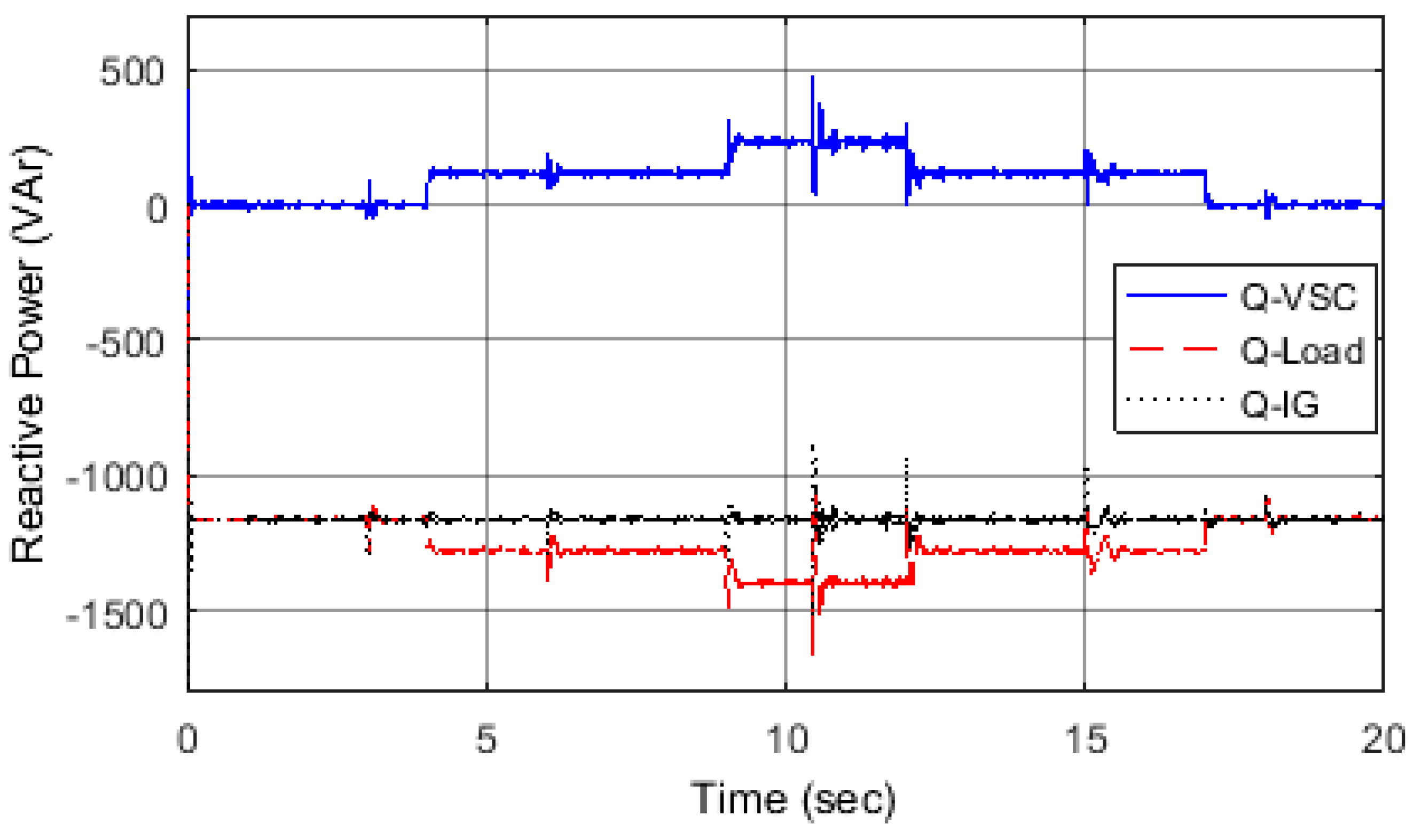
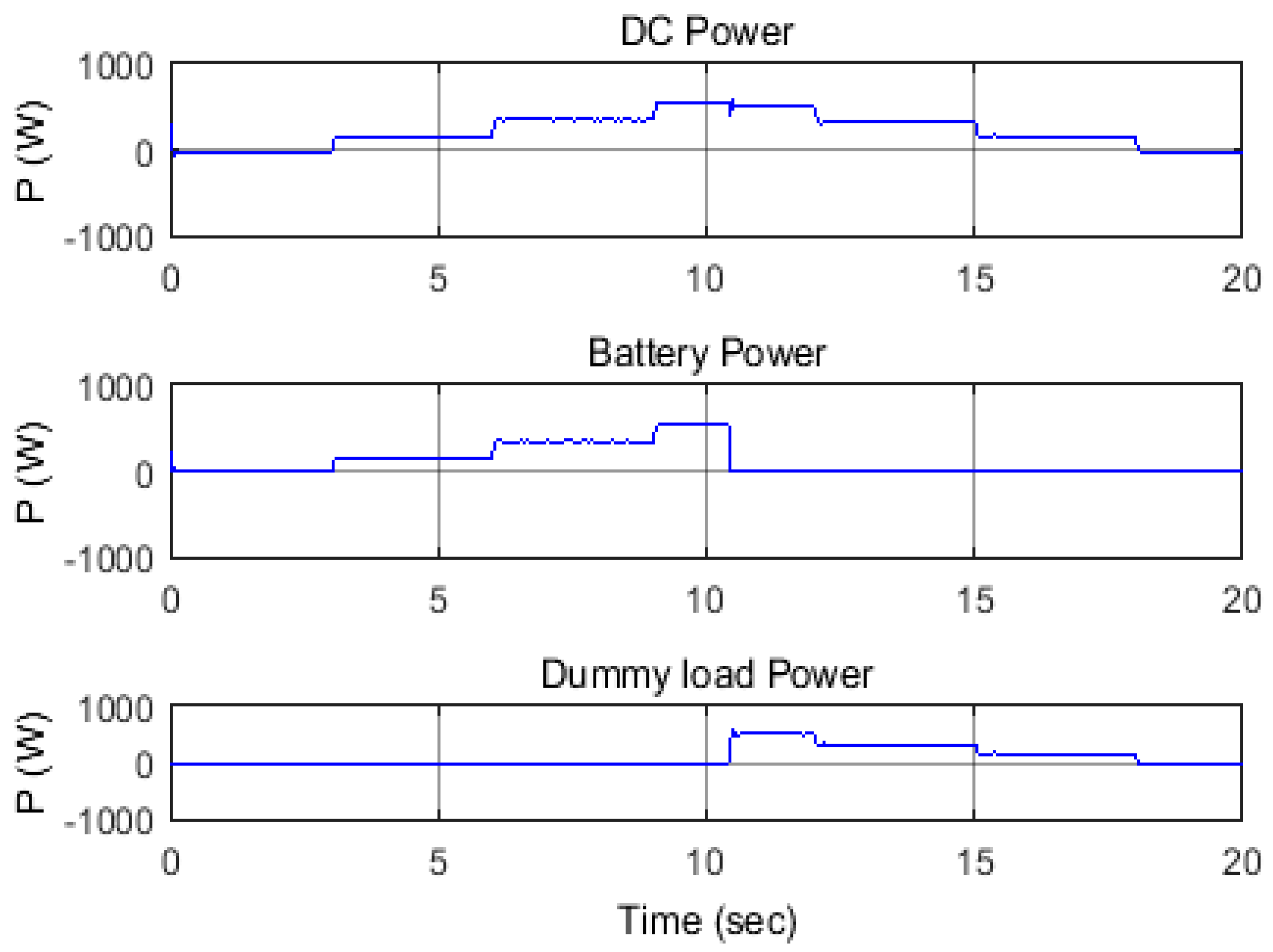
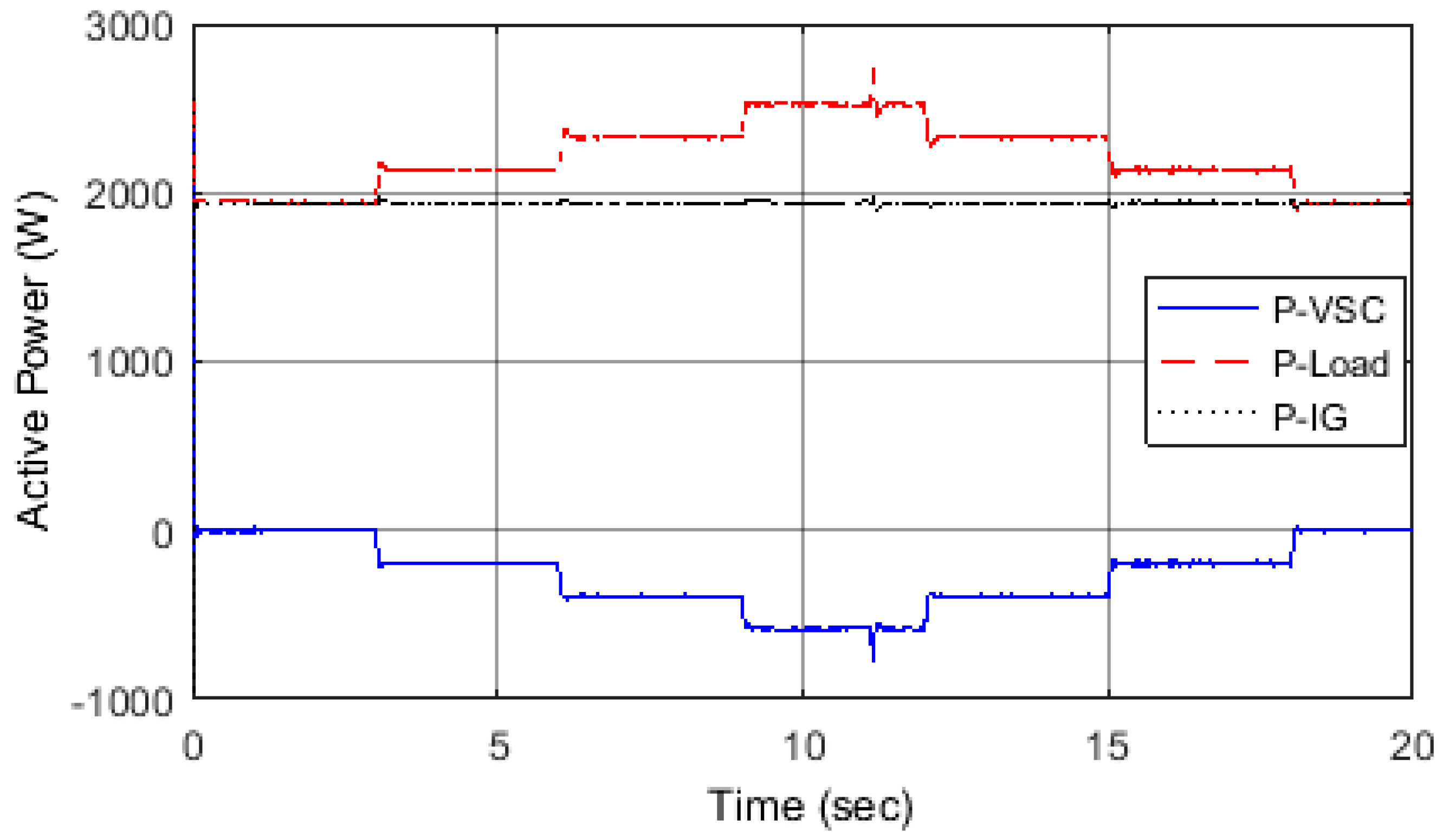
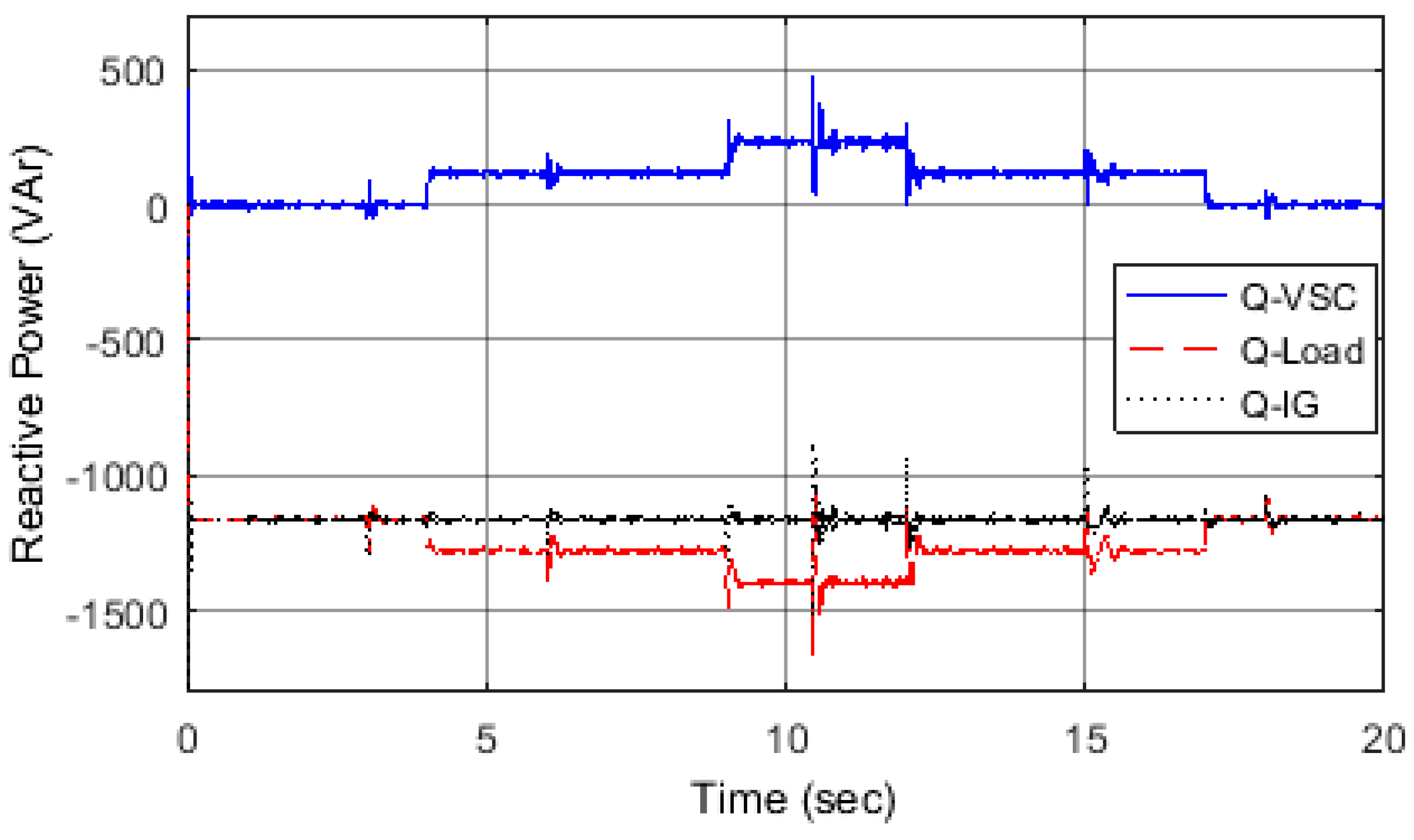
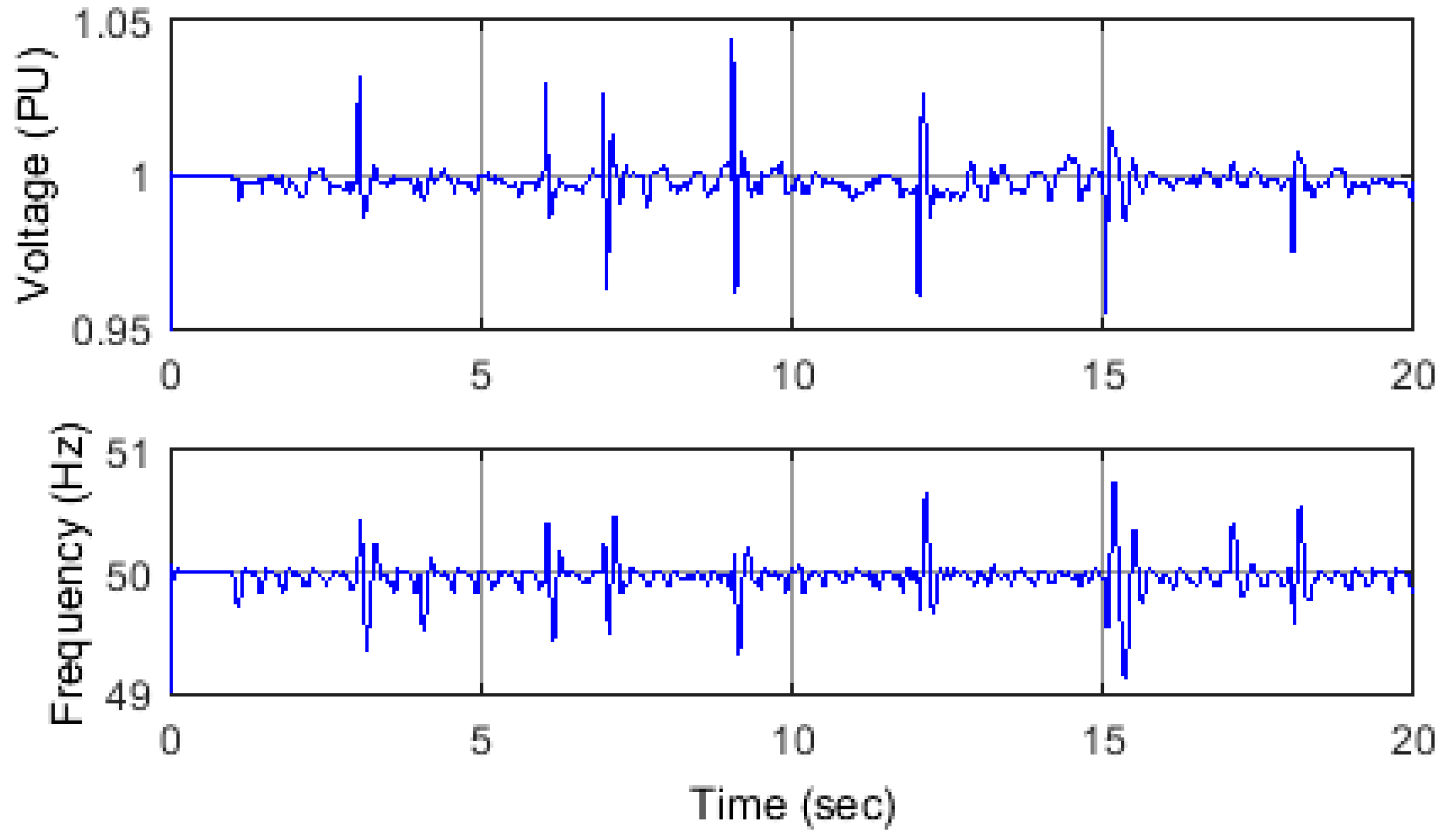
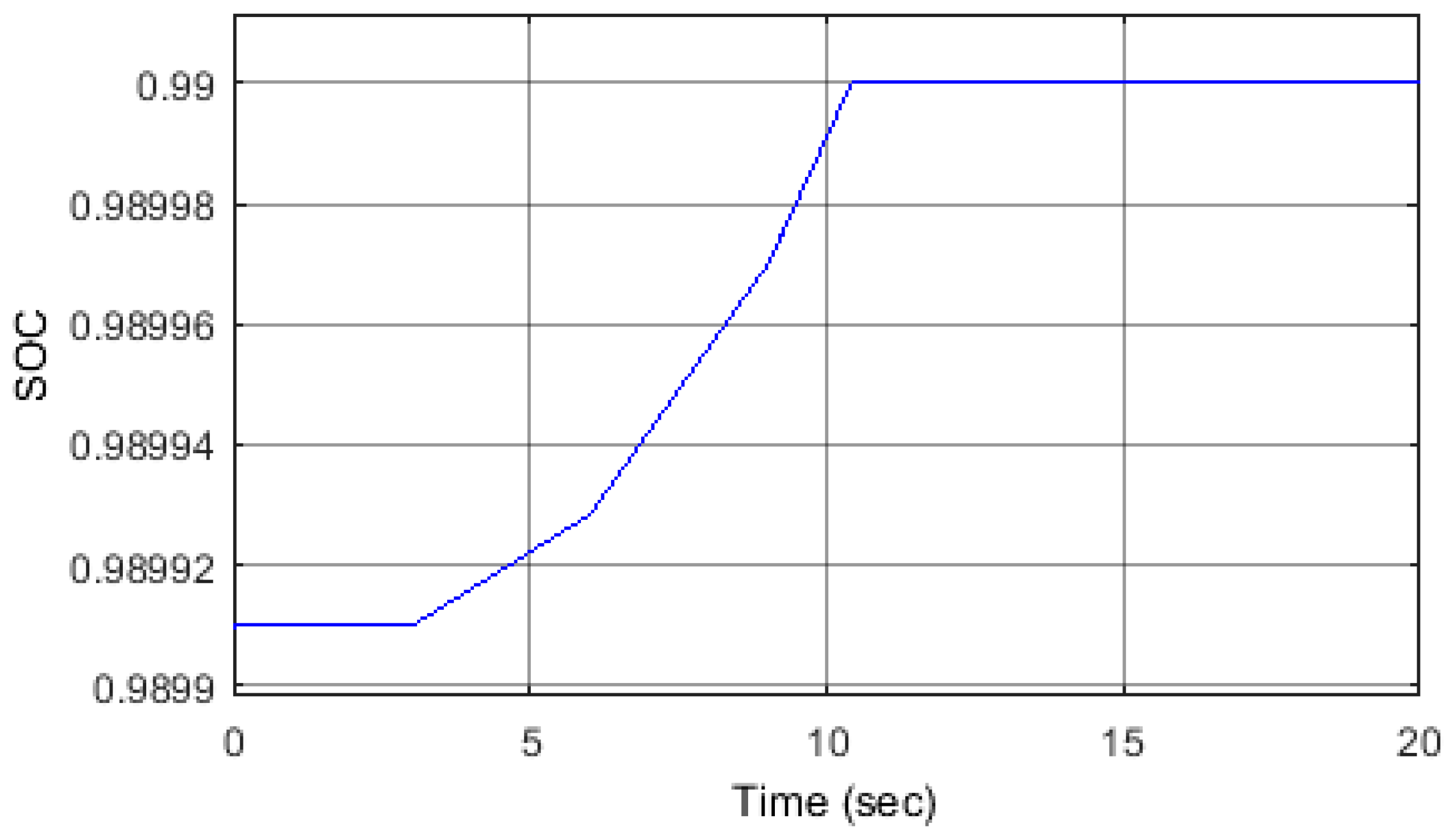
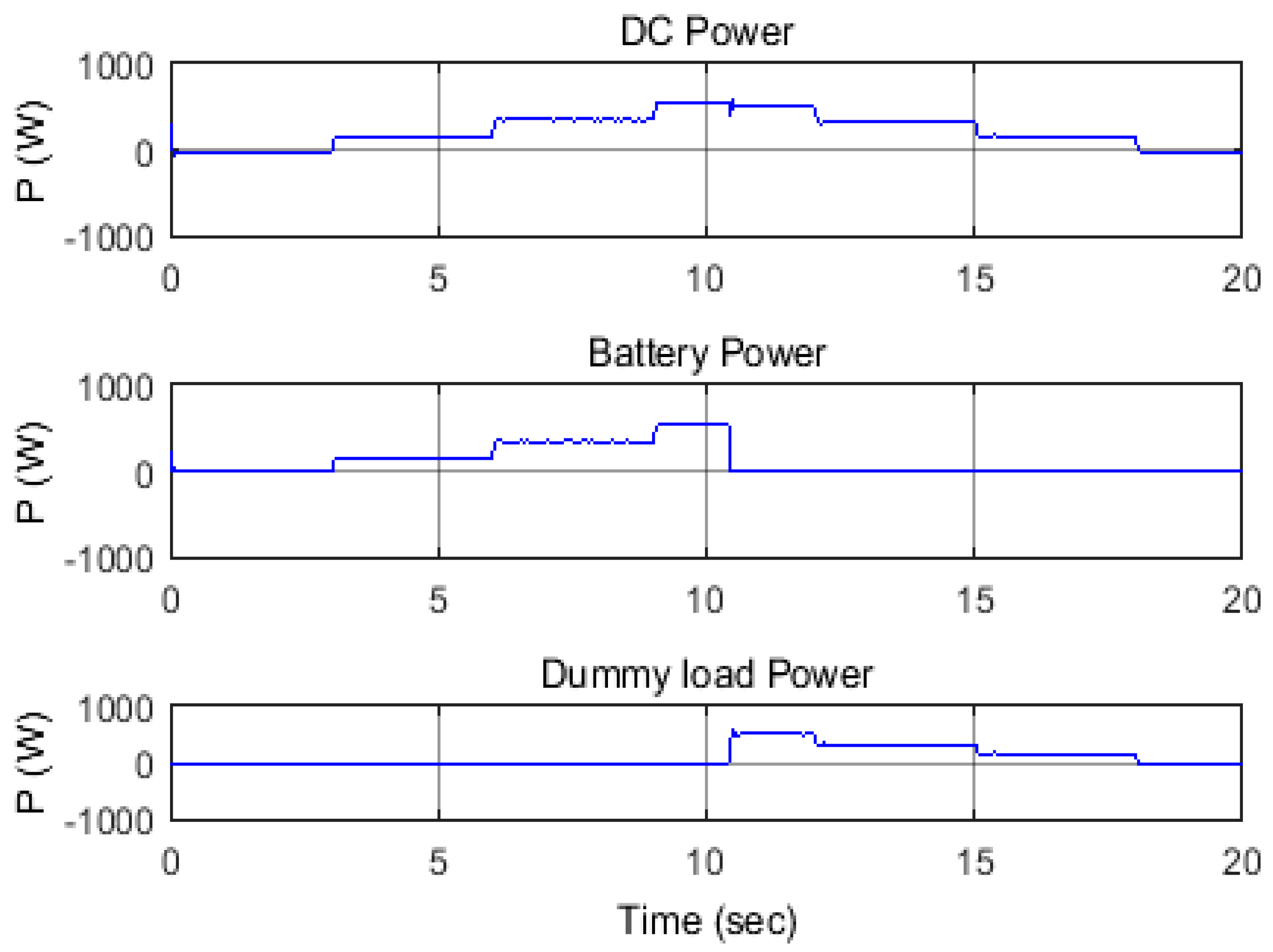
5.2. Scenario 2: Increase of Load’s Active and Reactive Power
5.3. Scenario 3: Decrease of Load’s Active and Reactive Power
6. Conclusions
Acknowledgment
Author Contributions
Conflicts of Interest
References
- Foreign-and-Commonwealth-Office. Carbon Reduction Delivery Plan. Available online: https://www.gov.uk (accessed on 5 January 2018).
- Stewart, M. Future Energy Scenarios, GB Gas and Electricity Transmission; National Grid Plc: Warwick, UK, 2016. [Google Scholar]
- UK-Energy. Pathways for the GB Electricity Sector to 2030. London. February 2016. Available online: https://www.energy-uk.org.uk (accessed on 7 January 2018).
- UK-Power-Networks. DNO Guide to Future Smart Management of Distribution Networks. London, 2014. Available online: https://www.innovation.ukpowernetworks.co.uk (accessed on 7 January 2018).
- Western-Power-Distribution. DSO-Transition-Strategy. Bristol. July 2017. Available online: https://www.westernpower.co.uk (accessed on 8 January 2018).
- Verma, N.; Pachori, A. Theoretical Approach for Comparison of Various Types of Wind Generator Systems. Int. J. Recent Res. Electr. Electron. Eng. IJRREEE 2015, 2, 29–35. [Google Scholar]
- Varshney, L.; Saket, R.K. Reliability evaluation of SEIG rotor core magnetization with minimum capacitive excitation for unregulated renewable energy applications in remote areas. Ain Shams Eng. J. 2014, 5, 751–757. [Google Scholar] [CrossRef]
- Gao, S.; Murthy, S.S.; Gayathri, M.S.; Bhuvaneswari, G. Design of a Microcontroller Based Electronic Load Controller for a Self-Excited Induction Generator Supplying Single-Phase Loads. J. Power Electron. 2010, 10, 444–449. [Google Scholar] [CrossRef]
- Kostic, M.G. Equivalent circuit improvement method for induction motor efficiency. Electron. Energ. 2012, 25, 31–42. [Google Scholar] [CrossRef]
- Deraz, S.A.; Kader, F.E.A. A new control strategy for a stand-alone self-excited induction generator driven by a variable speed wind turbine. Renew. Energy 2013, 51, 263–273. [Google Scholar] [CrossRef]
- Lan, H.; Wen, S.; Hong, Y.Y.; Yu, D.; Zhang, L. Optimal sizing of hybrid PV/diesel/battery in ship power system. Appl. Energy 2015, 158, 26–34. [Google Scholar] [CrossRef]
- Bernal-Agustín, J.L.; Dufo-López, R.; Yusta-Loyo, J.M.; Domínguez-Navarro, J.A.; Ramírez-Rosado, I.J.; Lujano, J.; Aso, I. Multi-objective optimization minimizing cost and life cycle emissions of stand-alone PV– wind–diesel systems with batteries storage. Appl. Energy 2011, 88, 4033–4041. [Google Scholar]
- Maleki, A.; Askarzadeh, A. Optimal sizing of a PV/wind/diesel system with battery storage for electrification to an off-grid remote region: A case study of Rafsanjan, Iran. Sustain. Energy Technol. Assess. 2014, 7, 147–153. [Google Scholar] [CrossRef]
- Subho, U.; Sharma, M.P. A review on configurations, control and sizing methodologies of hybrid energy systems. Renew. Sustain. Energy Rev. 2014, 38, 47–63. [Google Scholar]
- Kumar, A.; Sharma, V.K. Implementation of self-excited induction generator (SEIG) with IGBT based electronic load controller (ELC) in wind energy system. Int. J. Res. Eng. Technol. 2013, 2, 188–193. [Google Scholar]
- Murthy, S.S.; Malik, P.O.; Tandon, K.A. Analysis of self-excited induction generator. IEE Proc. C Gener. Transm. Distrib. 1982, 129, 260–265. [Google Scholar] [CrossRef]
- Grantham, C.; Sutanto, D.; Mismail, B. Steady state and transient analysis of self-excited induction generators. IEE Proc. B Electr. Power Appl. 1989, 136, 61–68. [Google Scholar] [CrossRef]
- Arrillaga, J.; Watson, B.D. Static power conversion from self-excited induction generators. Proc. Inst. Electr. Eng. 1978, 125, 743–746. [Google Scholar] [CrossRef]
- Bim, E.; Szajner, J.; Burian, Y. Voltage compensation of an induction generator with long-shunt connection. IEEE Trans. Energy Convers. 1989, 4, 526–530. [Google Scholar] [CrossRef]
- Shrindhar, L.; Singh, B.; Jha, C.S.; Murthy, S.S. Selection of capacitors for the self regulated short shunt self-excited induction generator. IEEE Trans. Energy Convers. 1995, 10, 10–17. [Google Scholar] [CrossRef]
- Tiwary, K.; Murthy, S.S.; Singh, B.B.; Shrindhar, L. Design based performance evaluation of two-winding capacitor self-excited single-phase induction generator. Electr. Power Syst. Res. 2003, 67, 89–97. [Google Scholar] [CrossRef]
- Al-saffar, M.A.; Nho, E.C.; Lipo, T.A. Controlled shunt capacitor self-excited induction generator. In Proceedings of the 1998 IEEE Thirty-Third IAS Annual Meeting Industry Applications Conference, St. Louis, MO, USA, 12–15 October 1998. [Google Scholar]
- Wekhande, S.; Agrawal, V. A new variable speed constant voltage controller for self-excited induction generator. Electr. Power Syst. Res. 2001, 59, 157–164. [Google Scholar] [CrossRef]
- Ekanayake, B.J. Induction generator for small hydro schemes. Power Eng. J. 2002, 16, 61–67. [Google Scholar] [CrossRef]
- Bonert, R.; Rajakaruna, S. Self-excited induction generator with excellent voltage and frequency control. IEE Proc. Gener. Transm. Distrib. 1998, 145, 33–39. [Google Scholar] [CrossRef]
- Stein, M.W.; Manwell, F.J.; McGowan, G.J. Power electronics based power shedding control for wind diesel systems. Int. J. Ambient Energy 1992, 13, 65–74. [Google Scholar] [CrossRef]
- Tamura, J.; Nakamichi, R.; Nakazawa, C.; Chihara, I. Analysis of an isolated self-excited induction generator. In Proceedings of the International Conference on Electrical Machines, Espoo, Finland, 28–30 August 2000. [Google Scholar]
- Ramachandran, J.; Ghanim, P.A. Dynamic behavior of single phase induction generator during disconnection and reconnection to the grid. In Proceedings of the 16th Power Systems Computation Conference (PSCC), Glasgow, UK, 14–18 July 2008. [Google Scholar]
- Dahraie, V.M.; Najafi, R.H.; Ebadian, M. Analytical investigation of the effect of wind farm equipped with SCIG on voltage stability. In Proceedings of the 2012 Second Iranian Conference on Renewable Energy and Distributed Generation (ICREDG), Tehran, Iran, 6–8 March 2012. [Google Scholar]
- Srivastava, K.A.; Kumar, A.A.; Schulz, N.N. Impact of distributed generations with energy storage devices on the electric grid. IEEE Syst. J. 2010, 6, 110–117. [Google Scholar] [CrossRef]
- Abdulkader, S. Voltage stability assessment for systems with large wind power generation. In Proceedings of the 44th International Universities Power Engineering Conference, Glasgow, UK, 1–4 September 2009. [Google Scholar]
- Farrag, M.E.A.; Ghanim, P.A. Analysis of the dynamics performance of self-excited induction generators employed in renewable energy generation. Energies 2014, 7, 278–294. [Google Scholar] [CrossRef]
- Barrado, J.; Griñó, R. Voltage and frequency control for a self-excited induction generator using a three-phase four-wire electronic converter. In Proceedings of the 12th International Power Electronics and Motion Control Conference (EPE-PEMC 2006), Portoroz, Slovenia, 30 August–1 September 2006. [Google Scholar]
- Barrado, J.; Griñó, R.; Valderrama, H. Standalone self-excited induction generator with a three-phase four-wire active filter and energy storage system. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007. [Google Scholar]
- Mateo, C.; Reneses, J.; Rodriguez-Calvo, A.; Frías, P.; Sánchez, Á. Cost-benefit analysis of battery storage in medium-voltage distribution network. IET Gener. Transm. Distrib. 2016, 10, 815–821. [Google Scholar] [CrossRef]
- Distributed Generation Connection Guide; Energy-Network-Association: London, UK, 2014.
- Basset, E.D.; Potter, F.M. Capacitive excitation of induction generators. Electr. Eng. 1935, 54, 540–545. [Google Scholar] [CrossRef]
- Markiewicz, H.; Klajn, A. Power Quality Application Guide, Voltage Disturbances; Standard EN 50160; Copper Development Association: Hemel Hempstead, UK, 2004; p. 4. [Google Scholar]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converter in Power Systems, Modeling, Control and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2010; pp. 207–220. [Google Scholar]
- Schauder, D.; Caddy, R. Current Control of Voltage-Source Inverters for Fast Four-Quadrant Drive Performance. IEEE Trans. Ind. Appl. 1982, 2, 163–171. [Google Scholar] [CrossRef]
- Schauder, D.; Mehta, H. Vector analysis and control of advanced static VAR compensators. IEE Proc. C 1993, 140, 299–306. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rating, voltage, frequency | |
| Resistance (stator/rotor) | |
| Inductance (stator/rotor) | |
| Inertia | |
| Optimal active power | |
| Optimal reactive power | |
| Battery Max. SoC | 99% |
| Battery Min. SoC | 30% |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasser, N.N.; Farrag, M.E.A. Power Management of Islanded Self-Excited Induction Generator Reinforced by Energy Storage Systems. Energies 2018, 11, 359. https://doi.org/10.3390/en11020359
Nasser NN, Farrag MEA. Power Management of Islanded Self-Excited Induction Generator Reinforced by Energy Storage Systems. Energies. 2018; 11(2):359. https://doi.org/10.3390/en11020359
Chicago/Turabian StyleNasser, Nachat N., and Mohamed E. A. Farrag. 2018. "Power Management of Islanded Self-Excited Induction Generator Reinforced by Energy Storage Systems" Energies 11, no. 2: 359. https://doi.org/10.3390/en11020359
APA StyleNasser, N. N., & Farrag, M. E. A. (2018). Power Management of Islanded Self-Excited Induction Generator Reinforced by Energy Storage Systems. Energies, 11(2), 359. https://doi.org/10.3390/en11020359