1. Introduction
In recent years, the penetration of wind energy into power systems has grown rapidly, which raises great concerns about the security and reliable operation of power systems. One challenge is the reduced system inertia due to the high wind power penetration [
1,
2,
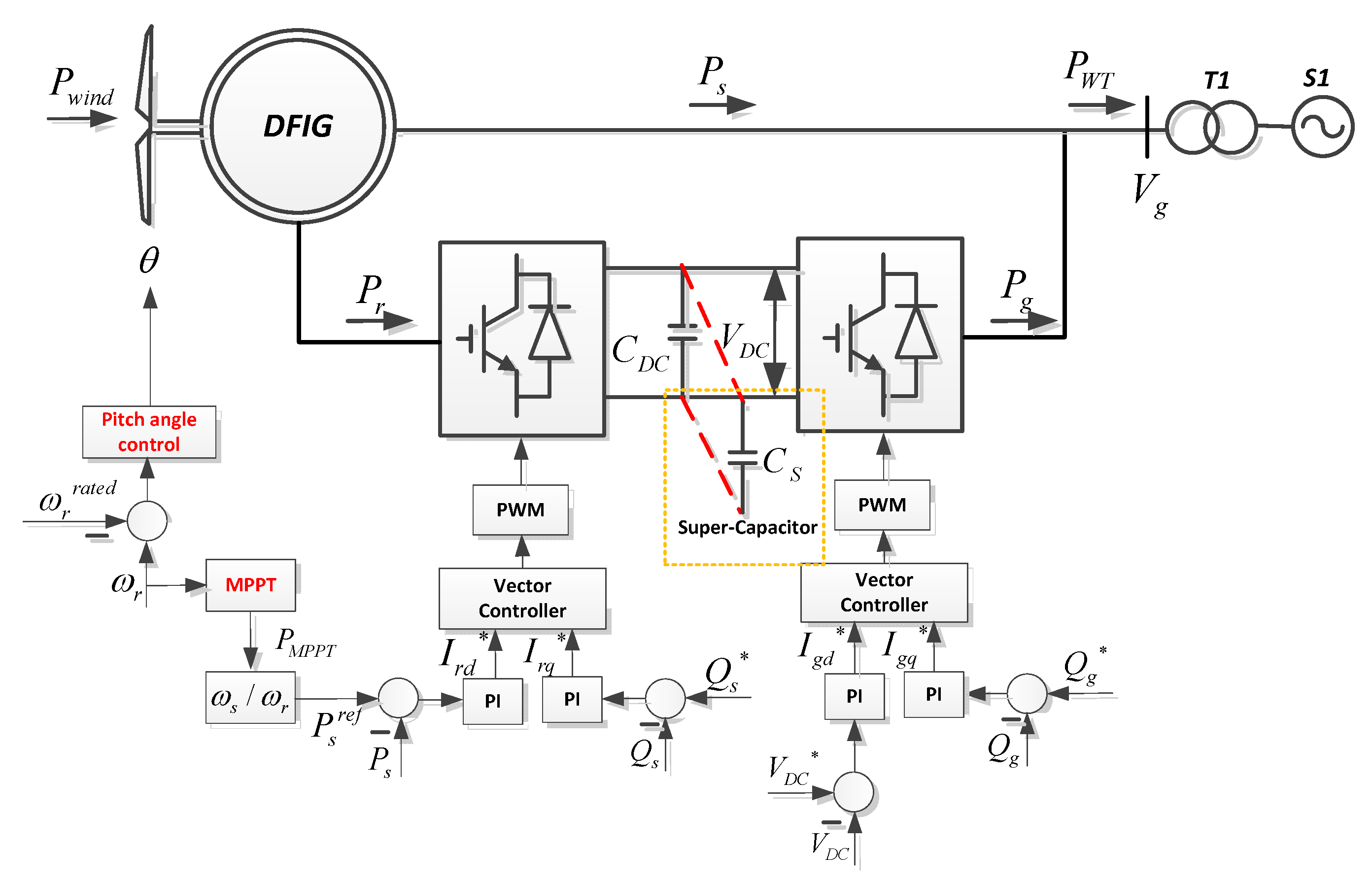
3]. Unlike the conventional synchronous machine, increasing variable speed wind turbines (WTs) are connected to the power grid via back-to-back power electronic devices. The main function of these converters is to maximize harvest wind energy, and make sure of the normal power transmission. With this control logic, WTs rotational speed and the system frequency are effectively decoupled. Correspondingly, the system disturbance that would result in the system frequency excursion can somewhat only be smoothed by the synchronous generator (SG) available in the power systems [
4,
5]. To improve the inertia level of high wind power penetration system, many countries have requested WTs to contribute to the system inertia or frequency response in the national grid codes [
6,
7].
To face with the wind random and intermittent nature, and provide related system inertia or frequency support from WT, one direct solution is to utilize energy storage system (ESS), such as pumped water, flying wheel devices, compressed air, and batteries, which can smooth the active power generation from WTs or emulate the power-frequency curve as conventional SG to stabilize system frequency [
8,
9,
10]. However, there are significant concerns from both technical and economic perspectives that may prevent wide use of these technologies. In addition, ESS technologies may not be economical considering charging and discharging losses, high installation investment, and relatively low life cycles. Therefore, it is necessary to investigate new control schemes that can fully utilize the self-potentials of WTs.
In fact, totally, three separated resources in wind conversion system can be used for enabling to provide fast system support. Firstly, the partially reserved wind energy by blade pitching of WT [
11,
12,
13] can be utilized to stabilize the grid frequency. This scheme requires WTs not to operate at their maximal power tracking point, which enables WTs to release partial reserved energy by increasing pitch angle or curtail excessive wind energy by decreasing pitch angle when system needs. Therefore, significant wind energy will be compromised through pitch angle control of WT. In addition, the control speed is comparably slow due to the mechanical regulation process involved, and the frequent utilization of blade pitching will increase the mechanical stress of WT and the fatigue of WT will frequently happen.
The second widely used solution is the rotational kinetic energy (KE) of WT rotor mass, which can well stabilize the grid frequency through the proper control design of the so-called emulated inertia control [
14,
15,
16,
17,
18,
19,
20,
21,
22]. In general, when detecting the grid frequency excursion, the set-point of WT generation reference will be accordingly changed. Sequentially, partially rotational energy of the WT rotor will be released via rotor speed deceleration when there is a generation shortage of the system or more wind energy will be temporarily stored in WT rotor via rotor speed acceleration when there is a load scarcity of the system. Broadly, the so-called emulated inertia control has three main methodologies including droop control which is based on the system frequency deviation [
14,
15,
16,
17], derivation control [
18,
19,
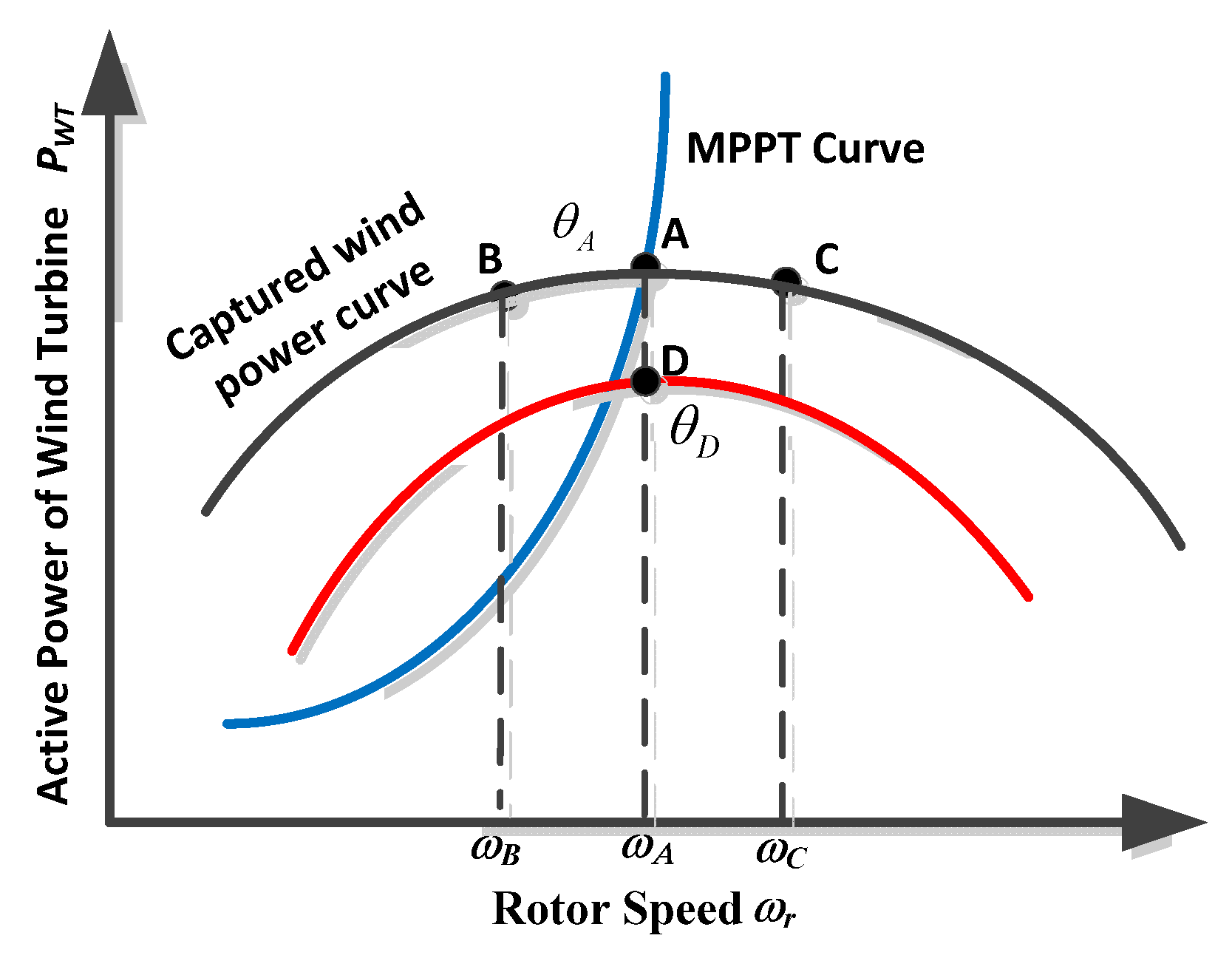
20] which is activated when detecting the change of the system frequency derivation and deloading control [
21,
22] by defined frequency power curve by shifting the WT operation status from MPPT. The main advantage of the derivation control is that it can emulate the inertia response of traditional SG very well, but it will easily lead to the grid instability with the noise in the grid frequency measurement. In [
17], the droop control is regarded as an effective inertia response scheme of WT for supporting system frequency.
The last solution that can be used for system frequency support is the DC-link self-capacitor energy of DFIG based WT. It is feasible for DFIG to temporarily increase or decrease DC-link voltage that partial DC capacitor energy can be utilized for system support. In [
23], a combined control by together utilization of the DC capacitor energy and reserved energy by blade pitching of the permanent magnetic SG for WT generation smoothing was proposed. Arani et al. [
24] pointed out the WT rotational mass and small capacitor of DFIG can be regarded as two important virtual inertia for DFIG based WT. Since the electrical energy stored in the DC-link capacitor is comparably small, a more economical solution is to install a super-capacitor to the back-to-back converter of DFIG to obtain large WT virtual inertia constant in this paper.
In the existing literatures, the main focuses have been drawn on the use of two afore-mentioned resources, namely, rotational rotor mass of DFIG and DC-link self-capacitor (super-capacitor based) separately for fast system support. However, how to jointly coordinate them to stabilize the grid frequency is not well investigated in the previous literatures.
Two controls on rapidly providing inertia support to fully use WT’s self-potential to provide the system support are proposed in this paper. The first scheme seeks to together use the energy from the installed super-capacitor and the WT rotational KE for system support. However, it needs WT to deviate from MPPT status constantly once the frequency disturbance happens, which is not a cost-effective scheme for wind farms. Accordingly, the second control implements a cascaded control structure to exert the energy from the installed super-capacitor firstly and then the KE from WT rotational mass to stabilize the system frequency, and it has an outstanding merit with minimizing the impaired impacts on energy production.
4. Cascading Control of Super Capacitor and WT Rotor
In the first strategy, the installed super-capacitor and rotor KE in the DFIG can provide the inertia support for the power grid. However, it may require WT to constantly deviate from its maximal power tracking point once there is system frequency deviation. Correspondingly, partial wind energy will be compromised while providing auxiliary frequency support.
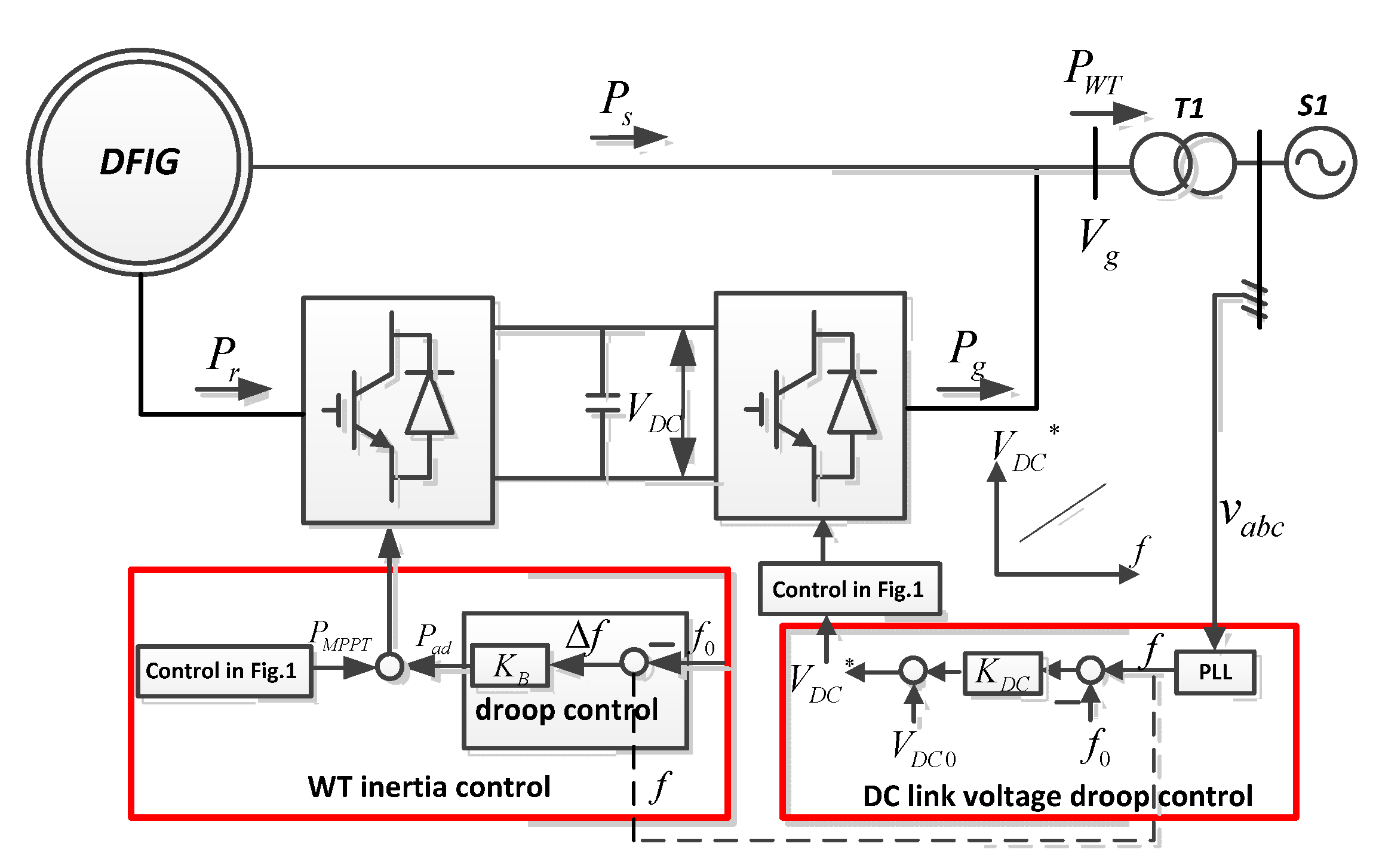
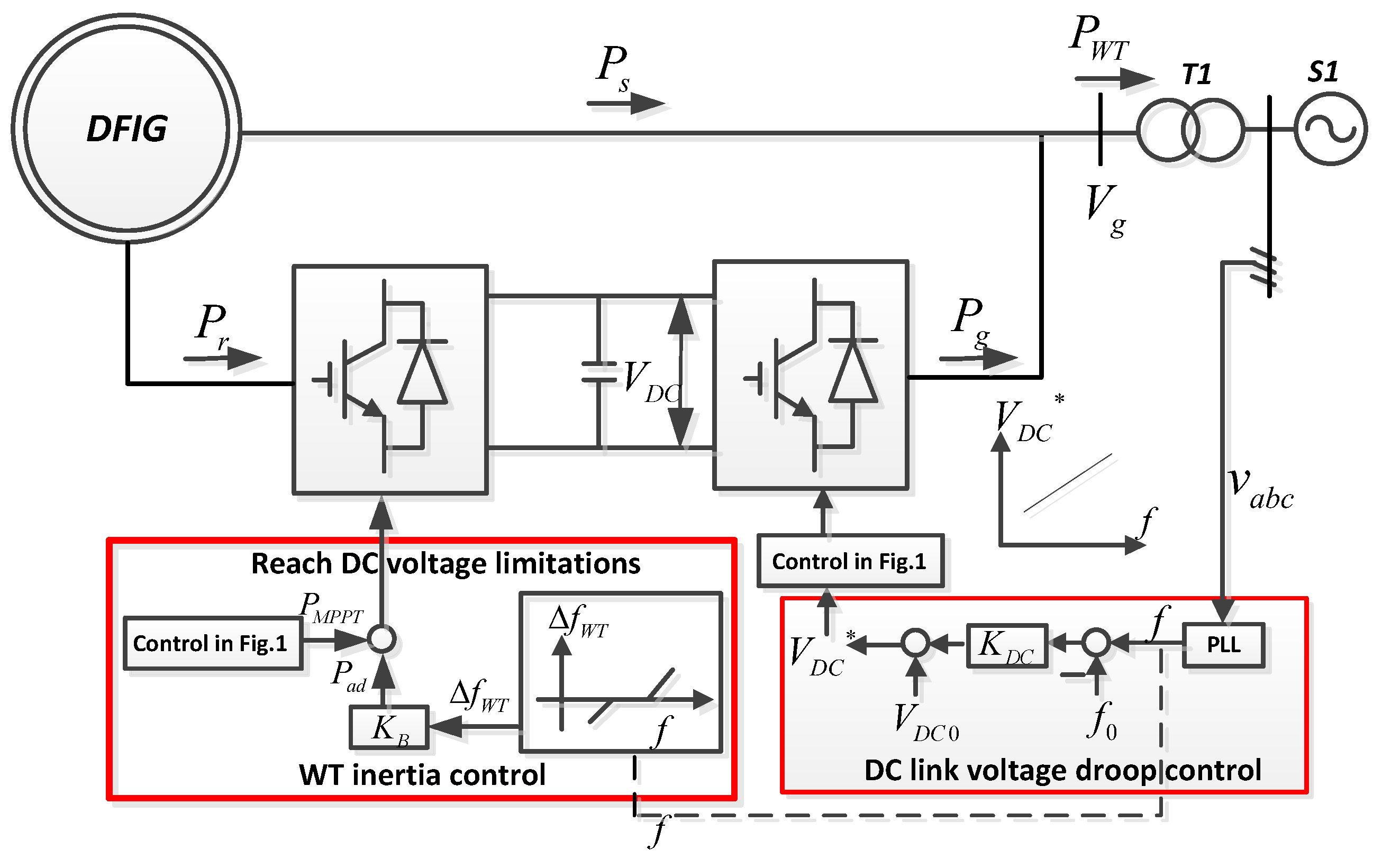
In order better to resolve the contradictory between providing the system frequency support and the maximal wind energy harvesting, a cascading control scheme that sequentially activates the inertia responses from the installed super-capacitor energy and then WT rotational KE automatically is proposed. The core of the scheme is that the energy stored in the super-capacitor is always firstly used, and WT rotational energy is exerted for system support only if there is still frequency deviation. In the proposed control, the stored energy in the super-capacitor is maximally utilized so that less wind energy can be curtailed due to the deviations from the MPPT caused by emulated inertia control. In the following sections, the concrete control design of GSC and RSC of DFIG based WT is illustrated.
4.1. Super-Capacitor Activated Only
In the cascading control, GSC still adopts DC-link voltage droop control. When the system frequency excursion is within a small range, the installed super-capacitor will contribute only to system support, and WT emulated inertia control is not activated, since it has impaired impacts to the MPPT operation of WT once there is activation of WT inertia control. This cascading design logic can better harvest the wind energy compared to the first simultaneous control. It may be economical in the daily operation of the system operator where small system frequency excursion prevails.
4.2. Both Super-Capacitor and WT Rotor KE Activated
The stored electrical energy will use up once the DC-link voltage reaches its limitation when system encounters large frequency deviations. Consequently, the rotational KE is activated to provide system support. To realize the frequency support scheme in
Section 3.2, a proper designed control scheme (AC system frequency dead band) is necessary to sequentially utilize the stored electrical energy in the stalled super-capacitor and the rotational KE in the rotor mass of DFIG-based WT. As a result, the frequent utilization of rotational KE of DFIG-based WT is effectively avoided via the above design philosophy:
where
fWT in (27) is the designed AC frequency deviation, which is an input signal of the emulated inertia control of WT.
f′ is the defined cut-off frequency.
The cut-off frequency
f′ represents the deviation of the AC system frequency deviation once super-capacitor uses up its energy (DC-link voltage reaches its limitation), yielding as:
Apparently, only the installed super-capacitor will be activated for the system support when the AC system frequency deviation is within the defined cut-off system frequency, as in Equation (28). When the system frequency deviation goes larger and exceeds the defined cut-off frequency, the rotational KE of WT will be released out for system support. The cascading control design has two distinguished merits compared to the first simultaneous control scheme: (1). Less wind energy production will be curtailed due to the less frequent activation of the rotor KE for the system support. and (2). The cascading design can optimally utilize the WT’s self-potentials and it is very suitable for the daily system operation when small system disturbances prevail. The defined virtual inertia constant
HR provided by the WT rotational KE can be expressed as follows:
The control scheme of the proposed cascading control is shown in
Figure 4. The total defined virtual inertia constant
HWT by the DFIG-based WT is shown as below:
5. Simulation Studies
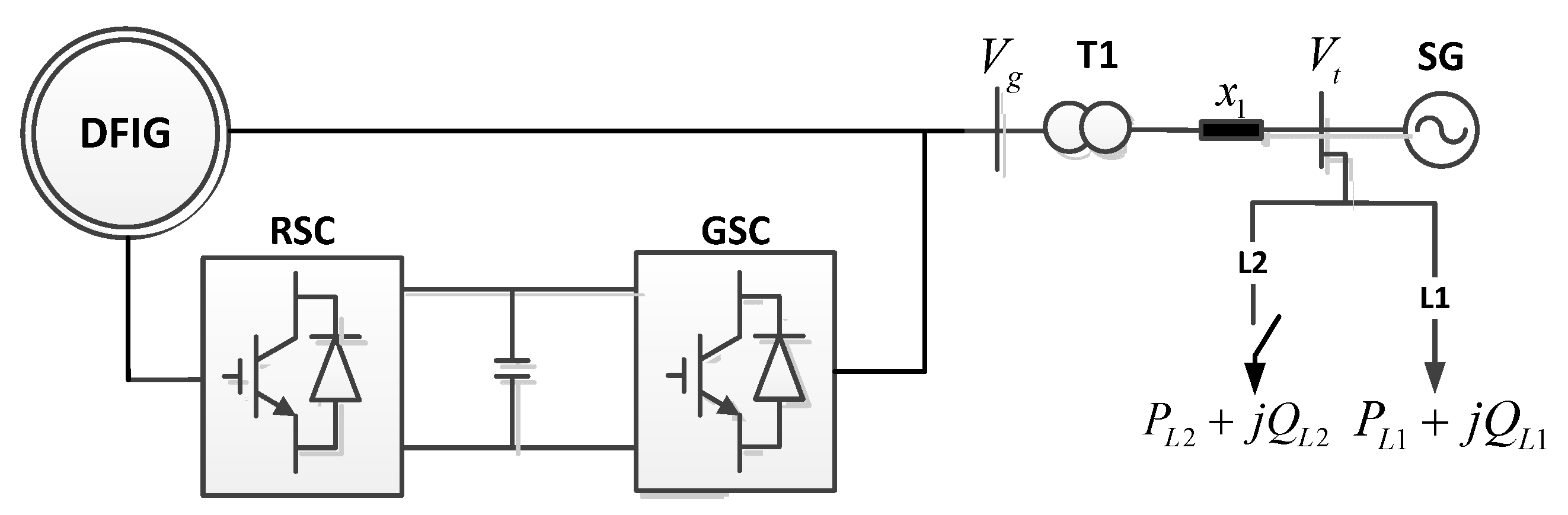
The
Figure 5 depicts a test model system that contains one SG, two local loads (L
1 and L
2), and a DFIG-based WT. The power grid is simply represented by the built seventh-order SG model [
29] and its detailed parameters are listed in
Table 1. The rating of the built SG and the DFIG-based WT is 3 MVA and 2 MVA, respectively. The wind power capacity penetration is around 40% in the designed system. L
1 is a fixed load
PL1 +
QL1 as 3 MW + 0.3 Mvar, and the capacity of the other dump load L
2 PL2 +
QL2 is set as 0.25 MW + 0.025 Mvar. In the test system, the droop control gain of the primary frequency control of the SG is set to 4%. The rated DC-link voltage of DFIG is set as 1.2 kV. The PWM frequency of the back-to-back converters is 10 kHz. More parameters of the modal system can be referred to the
Appendix. The reactance and resistance of the line
x1 is 0.025 Ω and 0.001 Ω. The transformer ratio is 0.69 kV/6.6 kV. The equivalent reactance of transformer in primary side is 0.05 p.u. and 0.004 p.u., respectively. The simulation software is DIgSILENT/Powerfactory, and the electro-mechanical simulation method is utilized and the time step is 75 μs.
5.1. Sudden Load Increase with Same Control Parameters
To simulate the sudden load increase disturbance of the system, the dump load
PL2 +
QL2 is suddenly switched on at
t = 10 s. In this case study, the control parameters for the droop control of the GSC (utilizing the energy stored in the super-capacitor) and the droop control for the RSC (utilizing the WT rotational KE) are set as
KDC = 2 and
KB = −4 in the simultaneous control and the proposed cascading control scheme.
Figure 6 shows the simulation results for this case. It is apparently seen that the system frequency deviation with both control scheme is effectively mitigated compared to the no additional frequency support control involved as shown in
Figure 6a. In addition, the system frequency nadir by the first control scheme (simultaneous control) is higher than the second control scheme (cascading control). This can be explained that the system support by the cascading control is only from the installed super-capacitor when the DC link-voltage is within its limitation, however, the system support can be obtained from both super-capacitor and the WT rotational KE. Accordingly, this well explains that the absolute rate of change of the frequency (ROCOF) value by the first control is apparently lower than that with the second proposed control, as shown in
Figure 6b. From
Figure 6c, it is shown that the mechanical power from SG is increased fastest with no additional control involved. However, it increases much more softly with the simultaneous control than that with cascading control, since more system support can be provided via first control. In this case study, DC-link voltage of both control schemes, as shown in
Figure 6d, is within its limitations, since a relatively small
KDC is selected. Accordingly, the second control does not activate WT rotational KE, as shown in
Figure 6f,h.
Figure 6f shows that the stator active power suddenly increases when detecting the system disturbance by first control. Correspondingly, the rotor speed of DFIG begins to decrease to release the partially KE to support the system frequency. Partially wind production will be curtailed since the rotor speed of DFIG deviates from its optimal speed. It can be roughly calculated as 0.0969 (shadow area marked in S), and indicates the curtailment the wind energy production during dynamics.
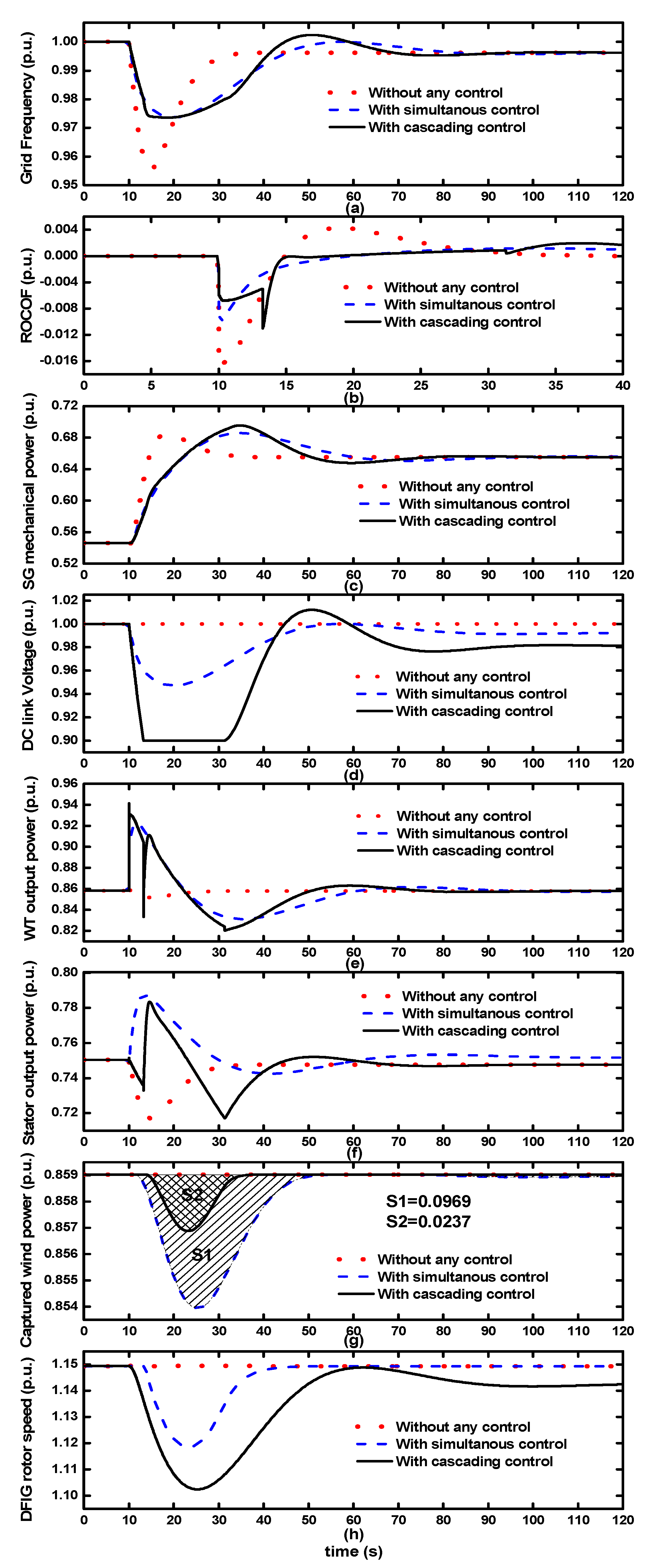
5.2. Sudden Load Increase with Different Control Parameters
Same sudden load increase event as the first case study is implemented, and
Figure 7 shows the simulation results. In this case, different control paraments are adopted to better compare two proposed schemes with a relatively fair evaluation index. The droop gain of the DC-link voltage control (utilizing the energy in super-capacitor)
KDC is set as 2 and 5 for the both schemes, respectively. The selection criterion of
KDC in cascading control is based on the system frequency excursion. In this paper, it is assumed that when the frequency excursion is over ±0.02 p.u., WT rotor KE begin to release out for stabilizing the system frequency.
KB of the first scheme (
KBI = −4) is the same as the previous case. The
KB of second control is selected by achieving the nearly the same frequency nadir or summit as with the first control under the same system disturbances, and it can be proved that both controls can provide the similar frequency support ability for the system. Accordingly, the energy production that can be saved by two controls can be fairly compared while rendering similar supports via two schemes. Accordingly,
KB of the second scheme is selected as −10 (
KBII = −10). It is shown from
Figure 7a,b that the absolute ROCOF value with the simultaneous control in the beginning of the event is larger than that of the second control. This is reasonable since the second control implements a larger droop parameter; thus, it can provide more system support. As shown in
Figure 7d, because of the larger
KDC in second control, DC-link voltage reaches its limitations faster, and the installed super-capacitor cannot provide any system support and it well explains the profile of DFIG WT active power is unsmoothed in
Figure 7e. Sequentially, the rotational KE of DFIG can be released out by the cascading control. The active power from the stator increases during the disturbances due to the releasable partial KE stored in the rotational WT as shown in
Figure 7f. It should be clearly noted that in
Figure 7g less energy production will be induced by the second control compared to the first one. The wind energy production losses are 0.0969 per unit (marked as S1) and 0.0237 (marked as S2) with both controls, which effectively verifies the energy efficient merit of the second control.
5.3. Sudden Load Decrease with Different Control Parameters
The dump load is suddenly switched out at
t = 10 s to simulate the sudden load decrease event, as shown in
Figure 8. It is clearly shown that the frequency peaks with both proposed schemes during the system disturbance are significantly lower than that with no additional control involved. To better compare the control impact on the harvested energy by two controls, control parameters of the two schemes are the same as in the previous case. The second control has a quicker DC-link voltage rise in
Figure 8d, since the larger
KDC is adopted. Notably, the super-capacitor’s electrical energy has been used up once DC-link voltage reaches its limitation and it well explains the unsmoothed profile of active power generation of DFIG in the second control, as shown in
Figure 8e. It is apparently seen in
Figure 8g,h that the proposed scheme leads to a smaller deviation from the optimal rotor speed. Consequently, the captured wind energy by the second control (S2 = 0.0237) is less than that by the first control (S1 = 0.0855).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}