A Comparative Study of Three Improved Algorithms Based on Particle Filter Algorithms in SOC Estimation of Lithium Ion Batteries

 ,
,
Abstract
:1. Introduction
2. Battery Modeling and Parameters Identification
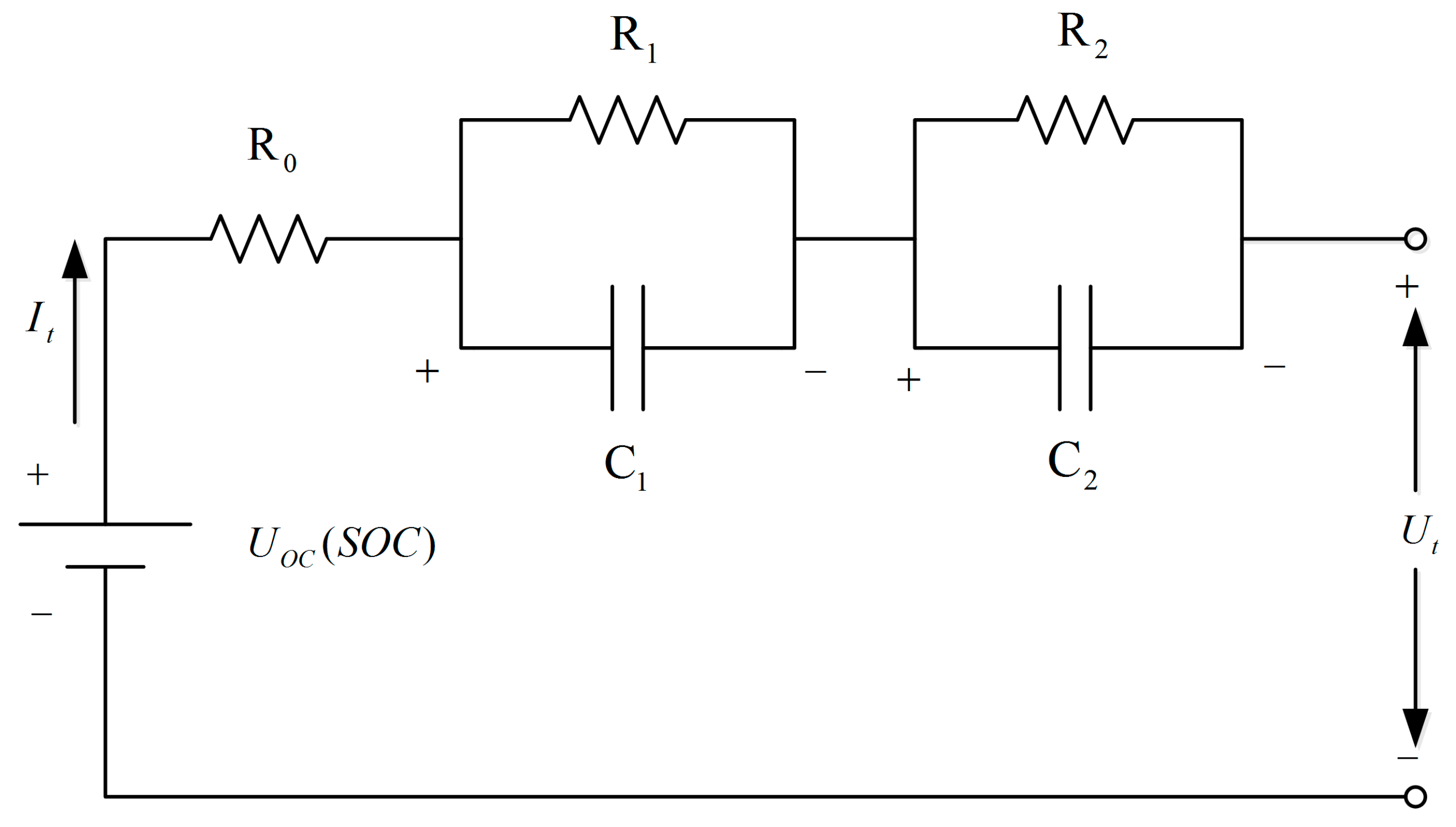
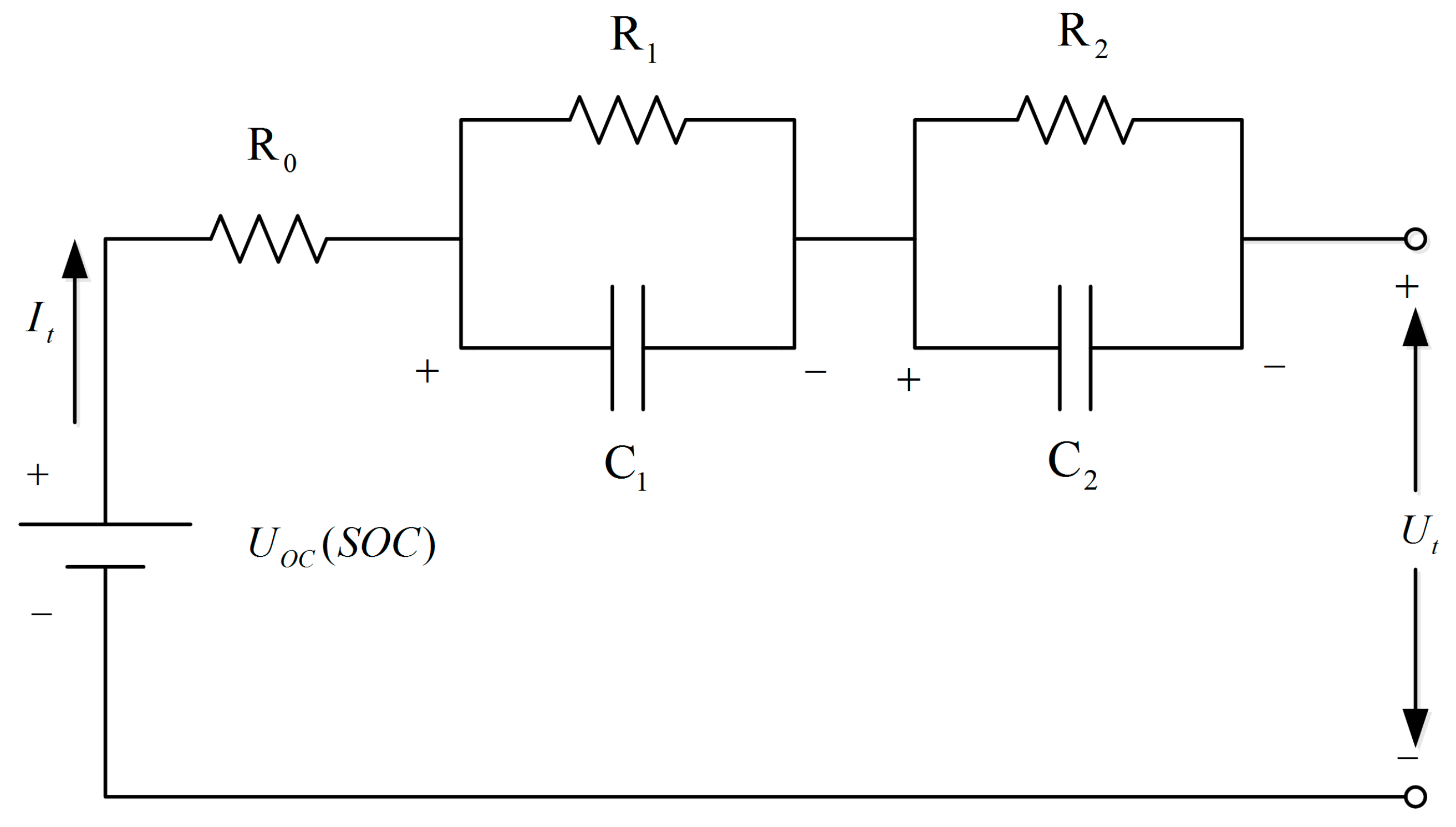
2.1. The SOC Definition and the Battery Model
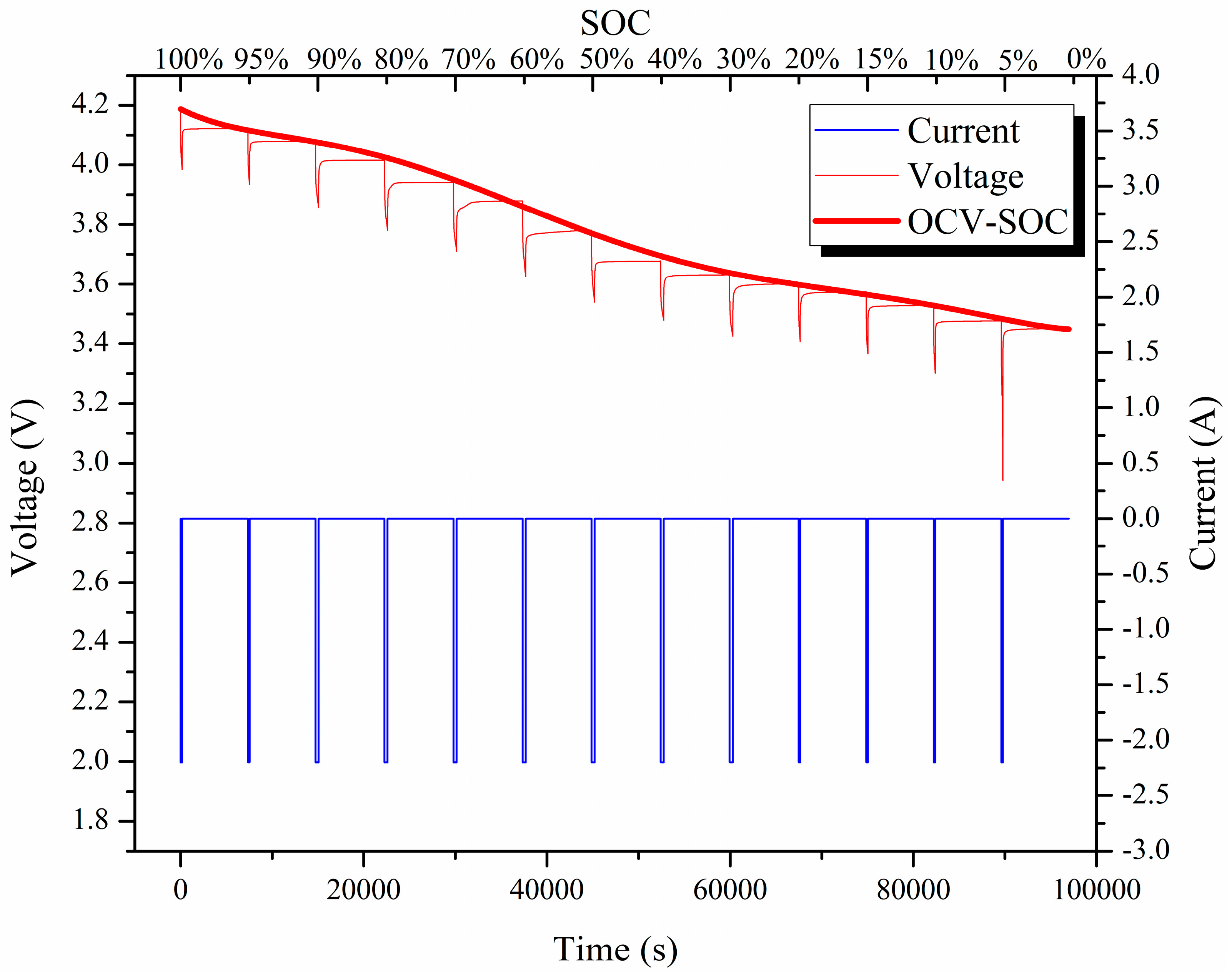
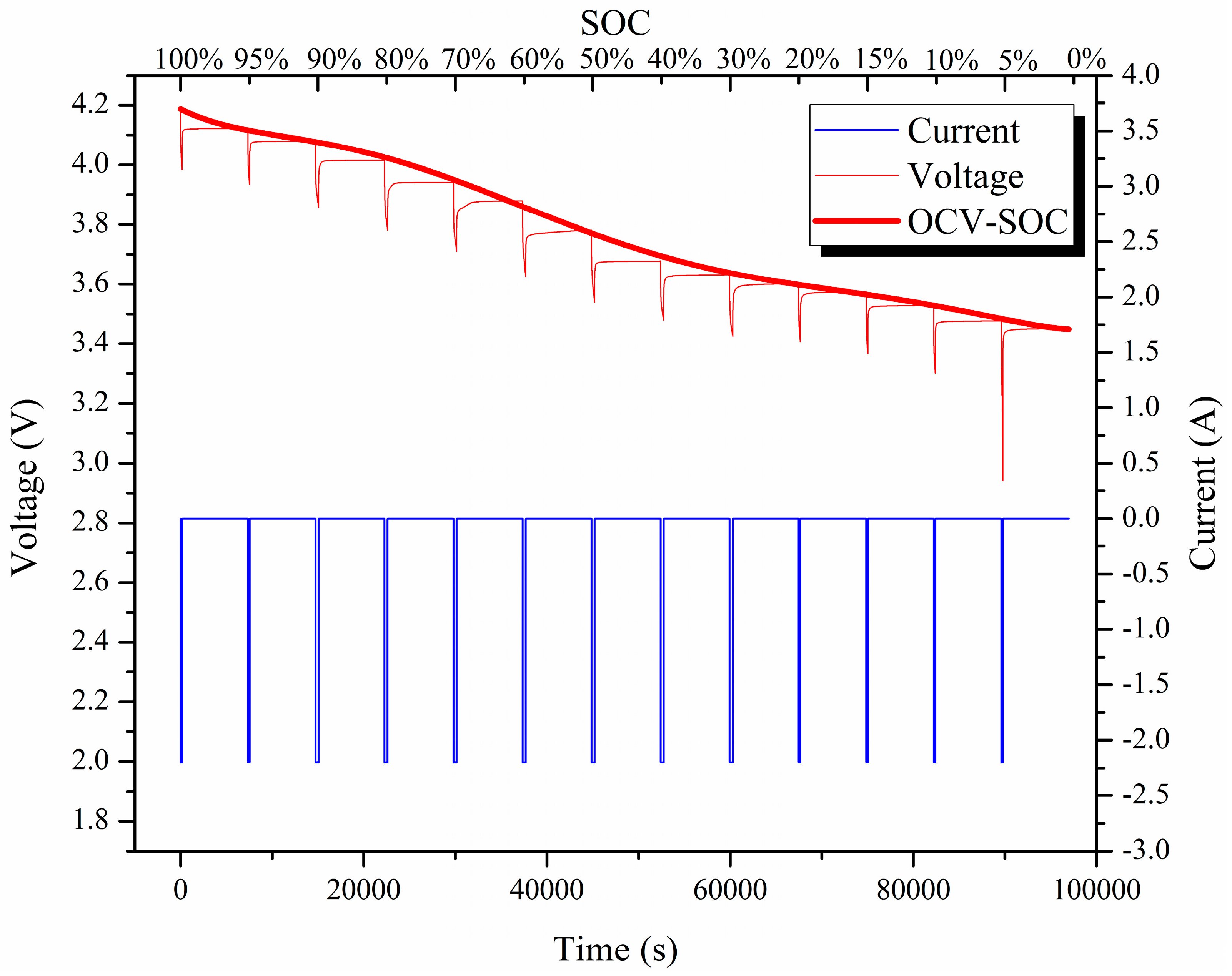
2.2. Parameter Identification
3. Algorithm Flow
3.1. Extended Particle Filter (EPF)
- Initialize particles:where represents the initial state of the i-th particle and represents the initial error covariance of the i-th particle. is the initial weight of the i-th particle and indicates the total number of particles. Additionally, the article selects N = 50 as an example.
- Predict the state and the error covariance:where is the process noise covariance at time k. is the process matrix.
- Calculate the Kalman gain:where denotes the measurement noise covariance at time k. is the measure matrix.
- Update the predicted state and the error covariance:
- Update particles:
- Calculate the weights of the particles:
- Normalize weights:
- Resampling:
3.2. Cubature Particle Filter (CPF)
- Initialize particles:
- Calculate the cubature points for each particle:denotes that the point is centered at the j-th point of , and the symbol is a complete set of all symmetric points, denoting the set of points generated by the full permutation of the elements of the n-dimensional unit vector and the change of the element symbol.
- Propagate the cubature points and calculate the predicted state:
- Calculate the cubature points for each particle:
- Propagate the cubature points and calculate the predicted measurement:
- Calculate the innovation covariance and the cross-covariance:
- Calculate the Kalman gain:
- Update the state and the error covariance:
- The latter part of the CPF method is the same as that of the EPF method from Equation (14) to the end of the method.
3.3. Unscented Particle Filter (UPF)
- Initialize particles:
- Generate sigma points for each particle:
- Propagate the sigma points and estimate the predicted state and the error covariance:
- Calculate the predicted measurement:
- Calculate the innovation covariance and the cross covariance matrices:
- Calculate the Kalman gain:
- Update the state and the error covariance:
- The latter part of the UPF method is the same as that of the EPF method from Equation (14) to the end of the method.
4. Test Bench and Discussion
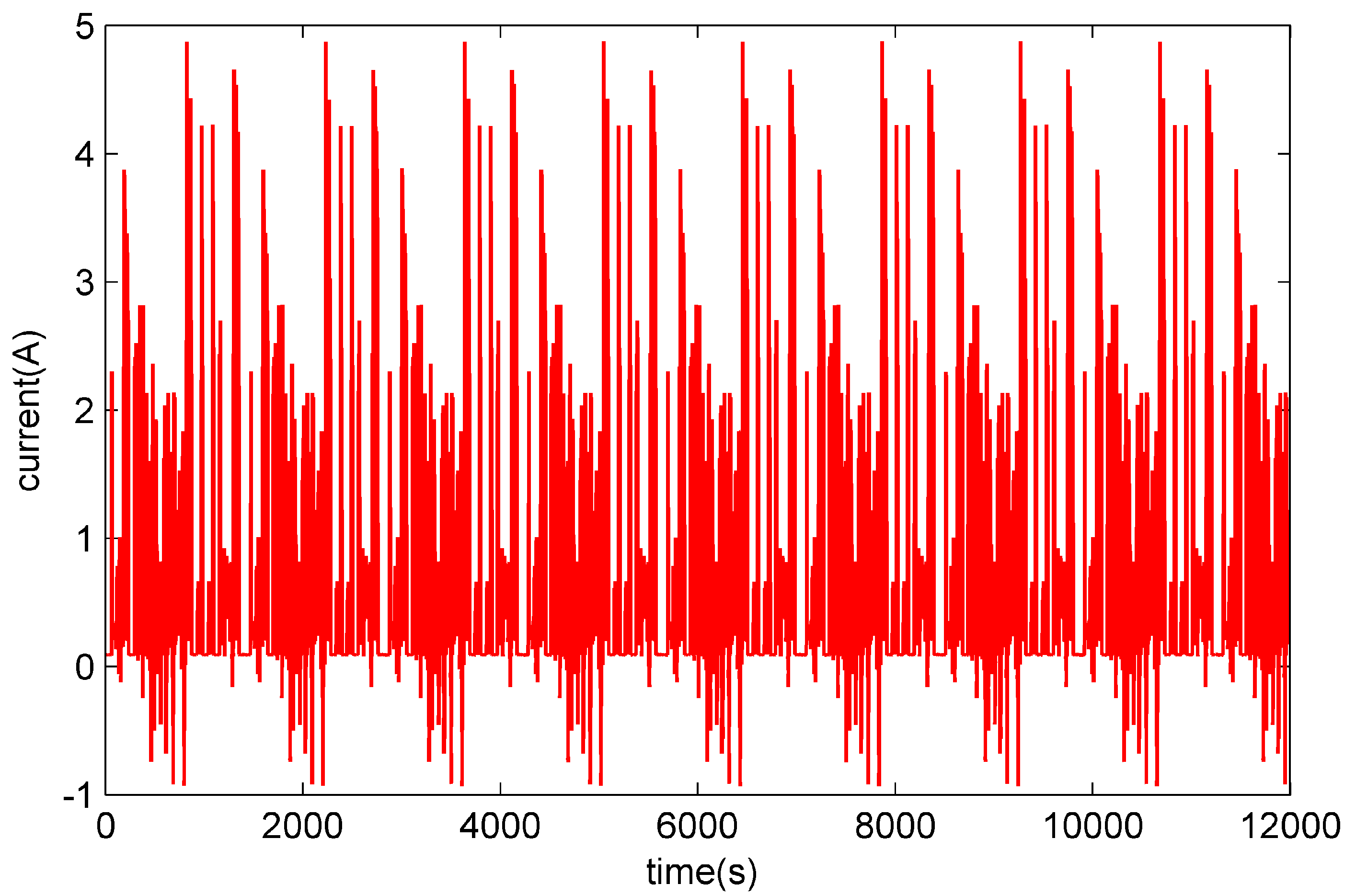
4.1. Battery Test Bench
4.2. Performance Comparison
4.2.1. Comparison of the Complexity of Methods
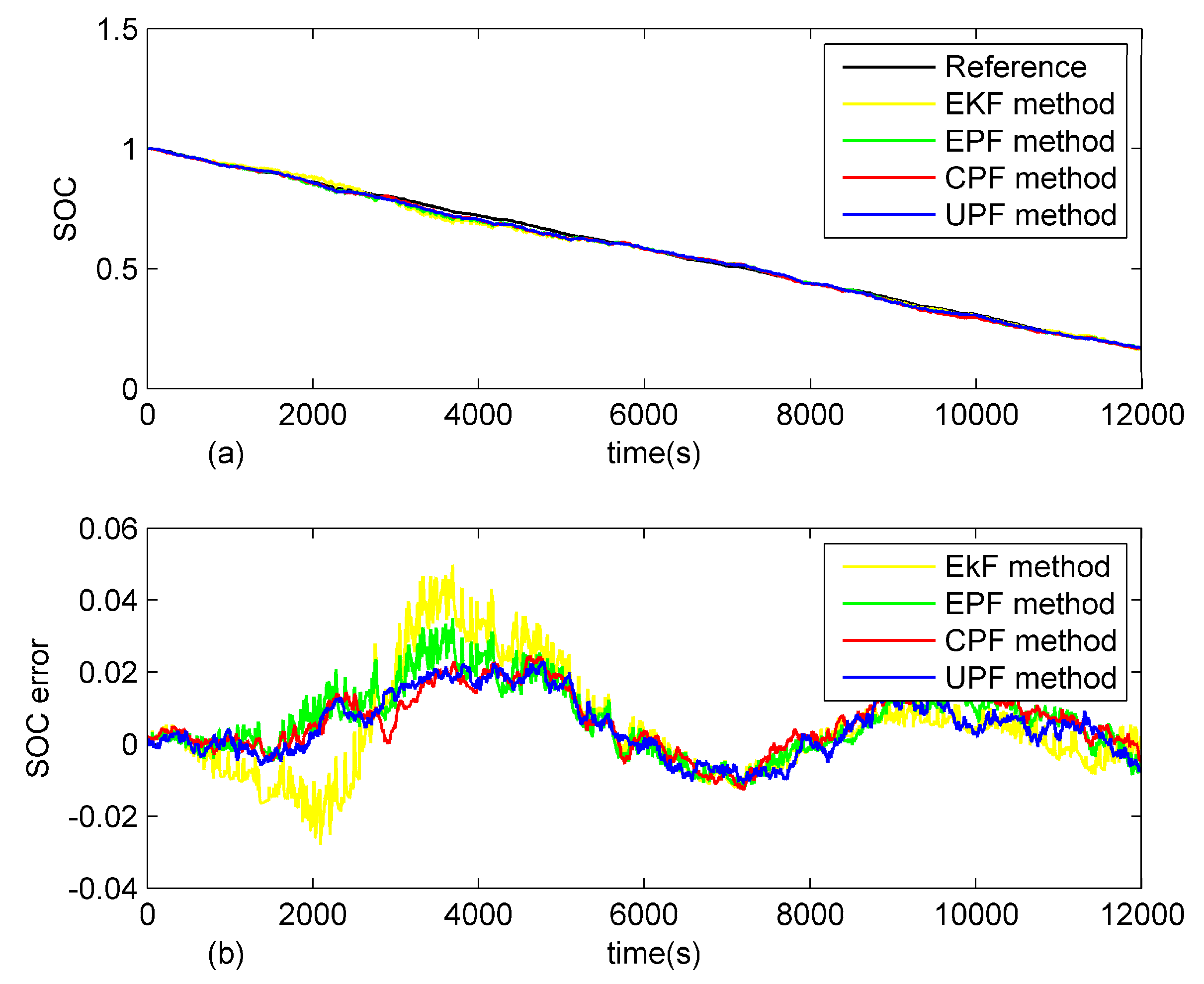
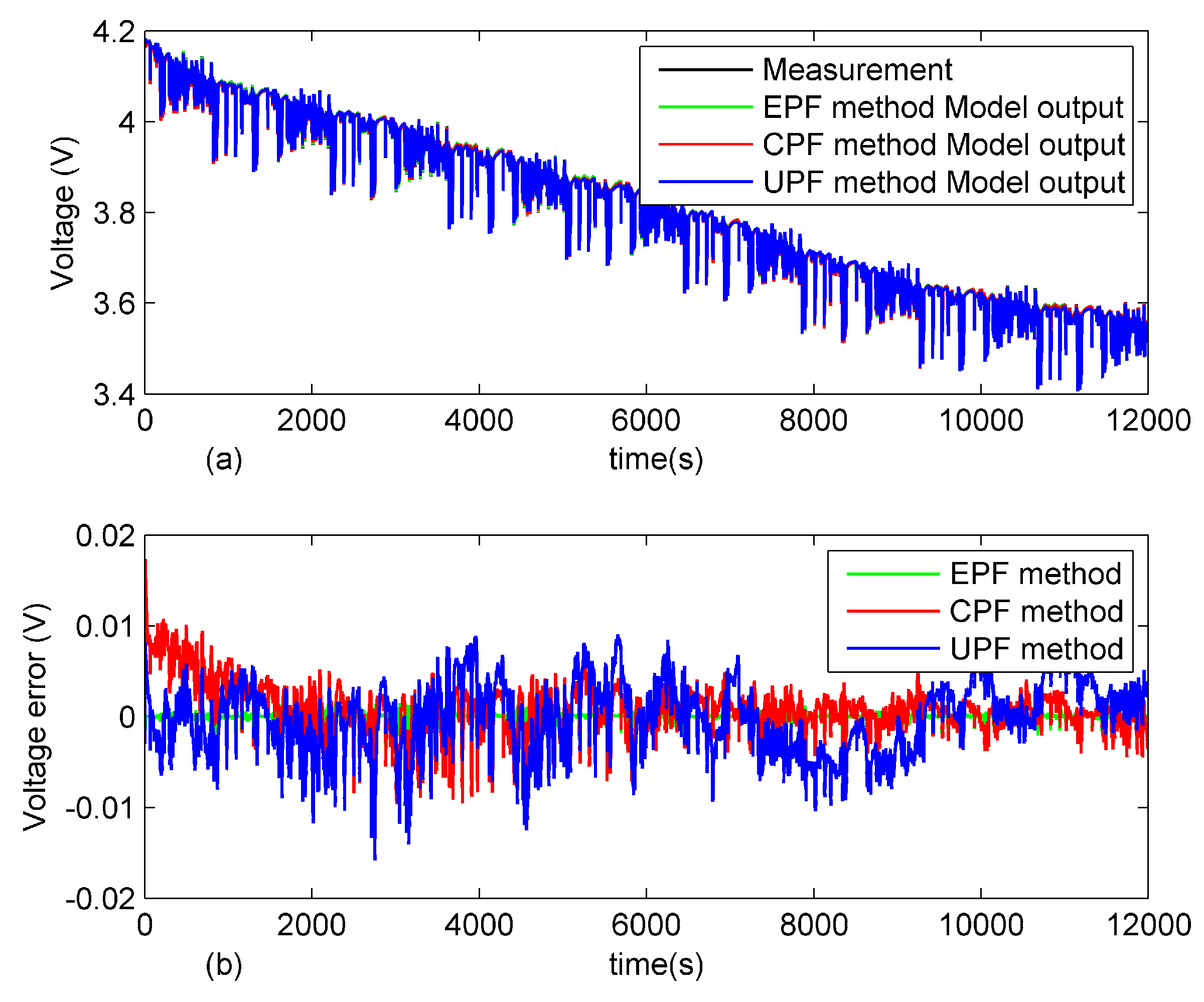
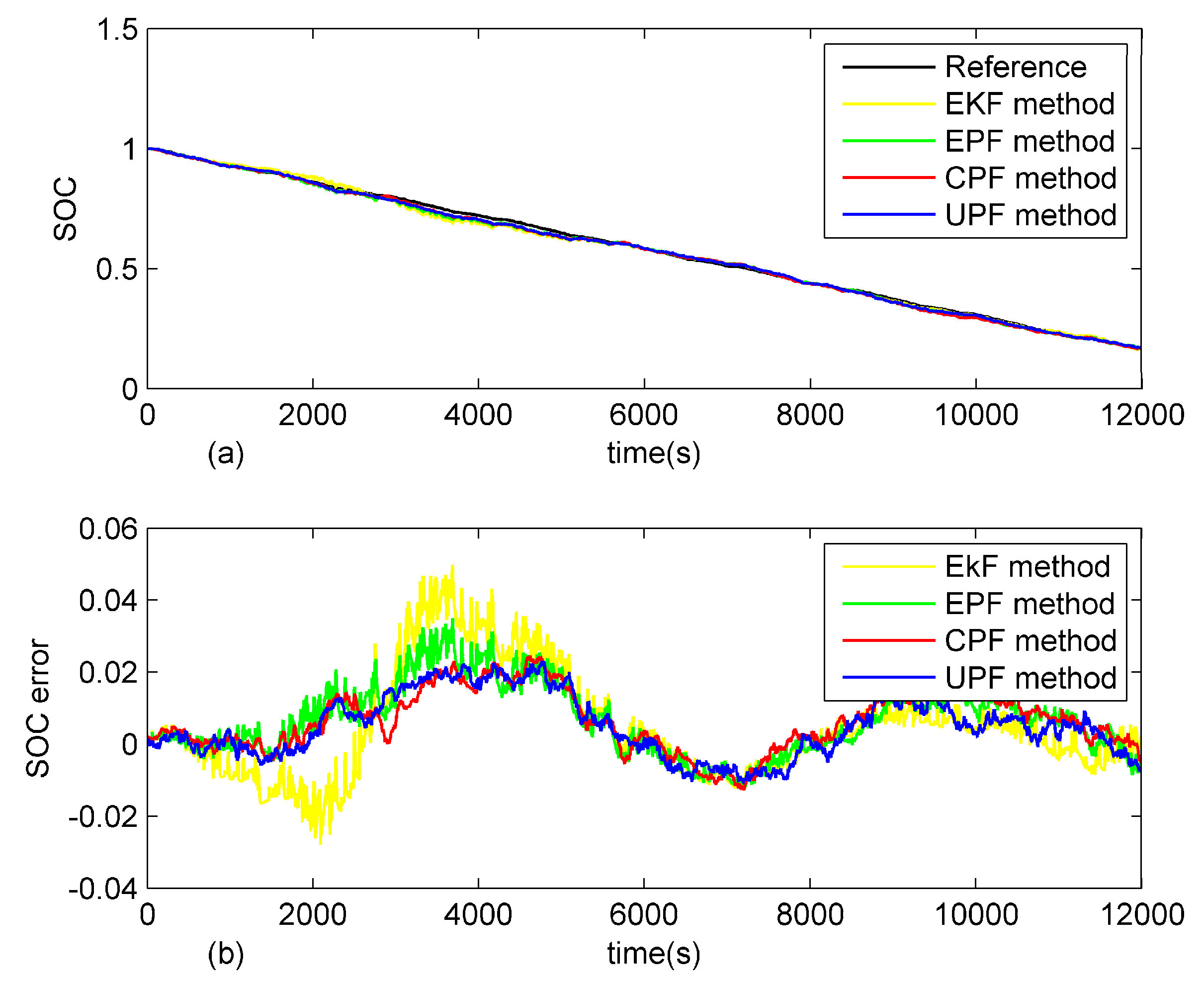
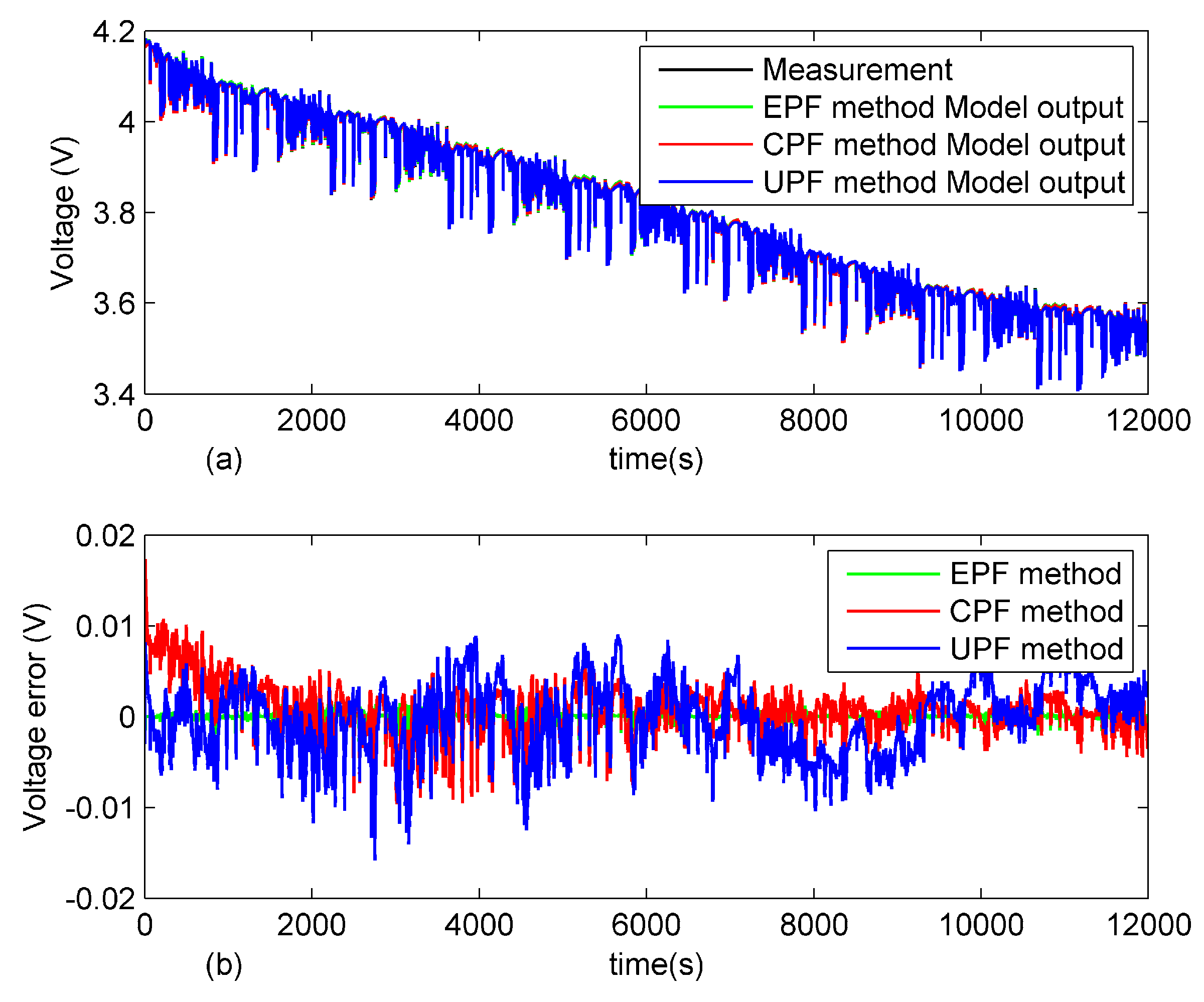
4.2.2. Comparison of the Accuracy and the Model Error of the Methods
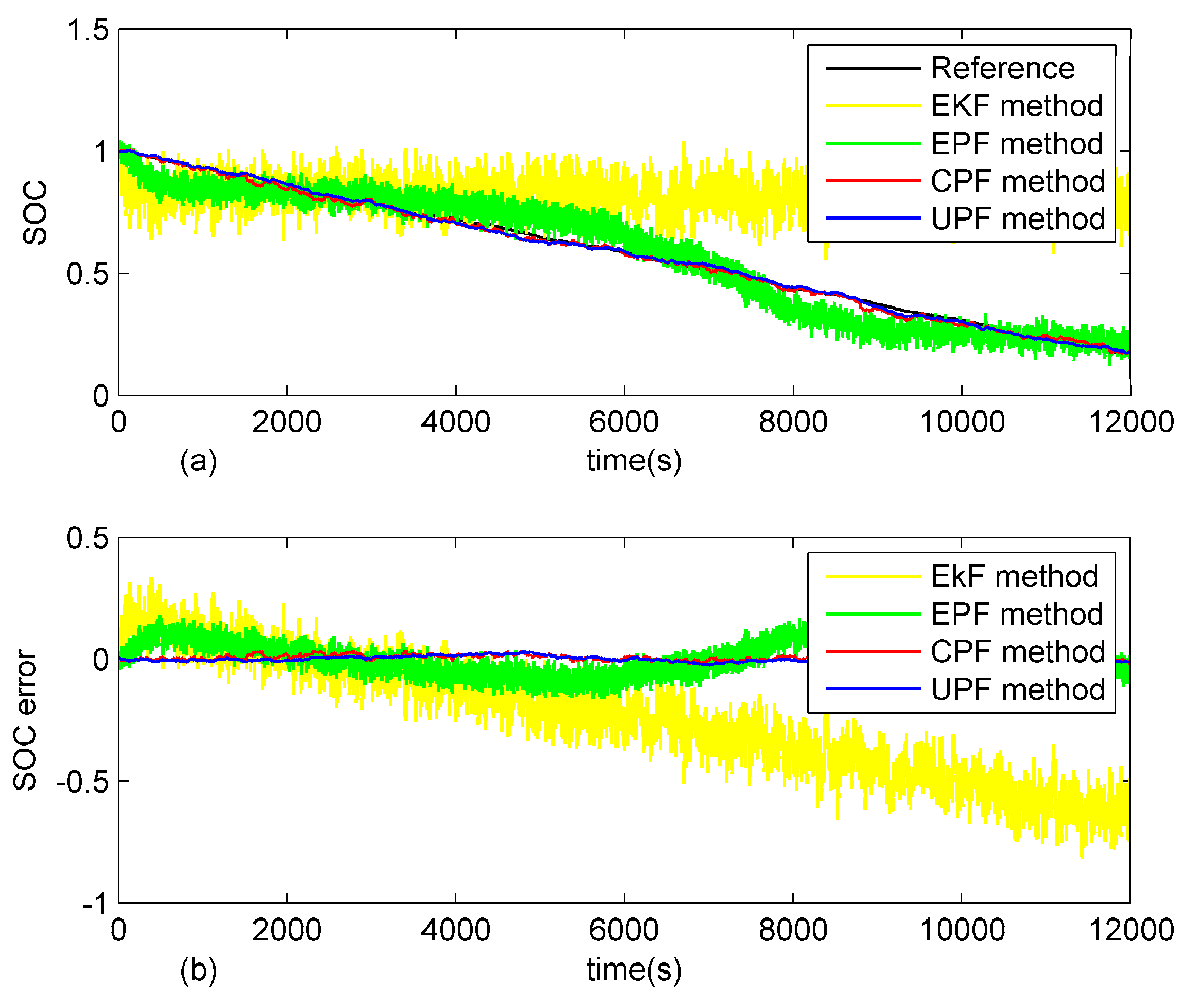
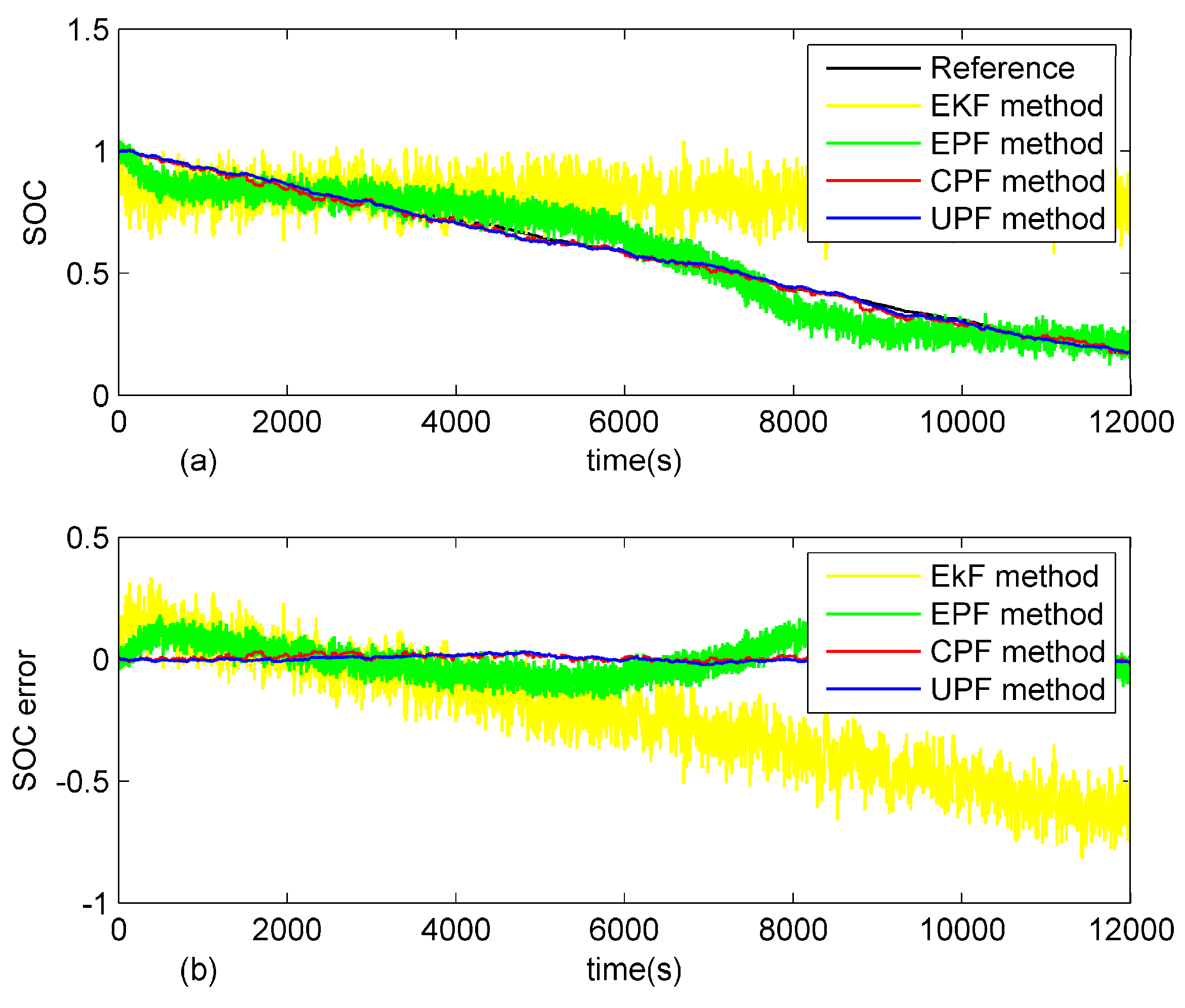
4.2.3. Comparison of Robustness
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yang, N.; Zhang, X.; Li, G. State of charge estimation for pulse discharge of a LiFePO4 battery by a revised Ah counting. Electrochim. Acta 2015, 151, 63–71. [Google Scholar] [CrossRef]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar] [CrossRef]
- Aylor, J.H.; Thieme, A.; Johnson, B.W. A battery state-of-charge indicator for electric wheelchairs. IEEE Trans. Ind. Electron. 1992, 39, 398–409. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Barbarisi, O.; Vasca, F.; Glielmo, L. State of charge Kalman filter estimator for automotive batteries. Control Eng. Pract. 2006, 14, 267–275. [Google Scholar] [CrossRef]
- Kim, J.; Cho, B.H. Screening process-based modeling of the multi-cell battery string in series and parallel connections for high accuracy state-of-charge estimation. Energy 2013, 57, 581–599. [Google Scholar] [CrossRef]
- Vasebi, A.; Bathaee, S.M.T.; Partovibakhsh, M. Predicting state of charge of lead-acid batteries for hybrid electric vehicles by extended Kalman filter. Energy Convers. Manag. 2008, 49, 75–82. [Google Scholar] [CrossRef]
- Xia, B.Z.; Wang, H.Q.; Tian, Y.; Wang, M.W.; Sun, W.; Xu, Z.H. State of Charge Estimation of Lithium-Ion Batteries Using an Adaptive Cubature Kalman Filter. Energies 2015, 8, 5916–5936. [Google Scholar] [CrossRef]
- Xia, B.Z.; Wang, H.Q.; Wang, M.W.; Sun, W.; Xu, Z.H.; Lai, Y.Z. A New Method for State of Charge Estimation of Lithium-Ion Battery Based on Strong Tracking Cubature Kalman Filter. Energies 2015, 8, 13458–13472. [Google Scholar] [CrossRef]
- Sun, T.; Xin, M. Hypersonic entry vehicle state estimation using nonlinearity-based adaptive cubature Kalman filters. Acta Astronaut. 2017, 134, 221–230. [Google Scholar] [CrossRef]
- Zhigang, H.; Dong, C.; Chaofeng, P.; Long, C.; Shaohua, W. State of charge estimation of power Li-ion batteries using a hybrid estimation algorithm based on UKF. Electrochim. Acta 2016, 211, 101–109. [Google Scholar] [CrossRef]
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Pathuri Bhuvana, V.; Unterrieder, C.; Huemer, M. Battery Internal State Estimation: A Comparative Study of Non-Linear State Estimation Algorithms. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–6. [Google Scholar]
- Ye, M.; Guo, H.; Cao, B. A model-based adaptive state of charge estimator for a lithium-ion battery using an improved adaptive particle filter. Appl. Energy 2017, 190, 740–748. [Google Scholar] [CrossRef]
- Li, J.; Barillas, J.K.; Guenther, C.; Danzer, M.A. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles. J. Power Sources 2013, 230, 244–250. [Google Scholar] [CrossRef]
- Aslan, S. Comparison of the hemodynamic filtering methods and particle filter with extended Kalman filter approximated proposal function as an efficient hemodynamic state estimation method. Biomed. Signal Process. Control 2016, 25, 99–107. [Google Scholar] [CrossRef]
- Yang, Z.; Gui, J.; Shag, S.; Zhao, X.; Zheng, C. EKPF-Based Dynamic State Estimation of Electromechanical Transient Process. Electr. Power 2015, 48, 94–98. [Google Scholar]
- Sheng-Yun, H.; Hsien-Sen, H.; Tsai-Sheng, K. Extended Kalman Particle Filter Angle Tracking (EKPF-AT) Algorithm for Tracking Multiple Targets. In Proceedings of the 2010 International Conference on System Science and Engineering, Taipei, Taiwan, 1–3 July 2010; pp. 216–220. [Google Scholar]
- Xia, B.; Sun, Z.; Zhang, R.; Lao, Z. A Cubature Particle Filter Algorithm to Estimate the State of the Charge of Lithium-Ion Batteries Based on a Second-Order Equivalent Circuit Model. Energies 2017, 10, 457. [Google Scholar] [CrossRef]
- Guo, R.; Gan, Q.; Zhang, J.; Guo, K.; Dong, J. Huber cubature particle filter and online state estimation. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2017, 231, 158–167. [Google Scholar] [CrossRef]
- Shen, Y.Q. Hybrid unscented particle filter based state-of-charge determination for lead-acid batteries. Energy 2014, 74, 795–803. [Google Scholar] [CrossRef]
- He, Y.; Liu, X.; Zhang, C.; Chen, Z. A new model for State-of-Charge (SOC) estimation for high-power Li-ion batteries. Appl. Energy 2013, 101, 808–814. [Google Scholar] [CrossRef]
- Li, Z.; Huang, J.; Liaw, B.Y.; Zhang, J. On state-of-charge determination for lithium-ion batteries. J. Power Sources 2017, 348, 281–301. [Google Scholar] [CrossRef]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Inline state of health estimation of lithium-ion batteries using state of charge calculation. J. Power Sources 2015, 299, 246–254. [Google Scholar] [CrossRef]
- Andre, D.; Meiler, M.; Steiner, K.; Walz, H.; Soczka-Guth, T.; Sauer, D.U. Characterization of high-power lithium-ion batteries by electrochemical impedance spectroscopy. II: Modelling. J. Power Sources 2011, 196, 5349–5356. [Google Scholar] [CrossRef]
- Zou, C.; Manzie, C.; Nešić, D.; Kallapur, A.G. Multi-time-scale observer design for state-of-charge and state-of-health of a lithium-ion battery. J. Power Sources 2016, 335, 121–130. [Google Scholar] [CrossRef]
- Xiong, B.; Zhao, J.; Wei, Z.; Skyllas-Kazacos, M. Extended Kalman filter method for state of charge estimation of vanadium redox flow battery using thermal-dependent electrical model. J. Power Sources 2014, 262, 50–61. [Google Scholar] [CrossRef]
- Tian, Y.; Li, D.; Tian, J.D.; Xia, B.Z. A Comparative Study of State-of-Charge Estimation Algorithms for Lithium-ion Batteries in Wireless Charging Electric Vehicles. In Proceedings of the 2016 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Knoxville, TN, USA, 4–6 October 2016; pp. 186–190. [Google Scholar]
- Doucet, A.; Godsill, S.; Andrieu, C. On sequential Monte Carlo sampling methods for Bayesian filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | EPF | CPF | UPF |
|---|---|---|---|
| First test | 76.655 | 142.451 | 161.919 |
| Second test | 75.494 | 139.794 | 154.117 |
| Third test | 67.888 | 129.757 | 142.855 |
| Methods | EKF | EPF | CPF | UPF |
|---|---|---|---|---|
| Mean absolute error | 0.011 | 0.010 | 0.009 | 0.008 |
| Maximum error | 0.051 | 0.034 | 0.028 | 0.026 |
| Methods | EKF | EPF | CPF | UPF |
|---|---|---|---|---|
| Mean absolute error | 0.279 | 0.060 | 0.011 | 0.009 |
| Maximum error | 0.813 | 0.199 | 0.041 | 0.029 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, B.; Sun, Z.; Zhang, R.; Cui, D.; Lao, Z.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. A Comparative Study of Three Improved Algorithms Based on Particle Filter Algorithms in SOC Estimation of Lithium Ion Batteries. Energies 2017, 10, 1149. https://doi.org/10.3390/en10081149
Xia B, Sun Z, Zhang R, Cui D, Lao Z, Wang W, Sun W, Lai Y, Wang M. A Comparative Study of Three Improved Algorithms Based on Particle Filter Algorithms in SOC Estimation of Lithium Ion Batteries. Energies. 2017; 10(8):1149. https://doi.org/10.3390/en10081149
Chicago/Turabian StyleXia, Bizhong, Zhen Sun, Ruifeng Zhang, Deyu Cui, Zizhou Lao, Wei Wang, Wei Sun, Yongzhi Lai, and Mingwang Wang. 2017. "A Comparative Study of Three Improved Algorithms Based on Particle Filter Algorithms in SOC Estimation of Lithium Ion Batteries" Energies 10, no. 8: 1149. https://doi.org/10.3390/en10081149