
Enhancement of Power System Stability Using a Novel Power System Stabilizer with Large Critical Gain


State Key Laboratory of Advanced Electromagnetic Engineering and Technology, School of Electrical and Electronic Engineering, Huazhong University of Science and Technology, Wuhan 430074, China
*
Author to whom correspondence should be addressed.
Energies 2017, 10(4), 449; https://doi.org/10.3390/en10040449
Submission received: 2 February 2017
/
Revised: 15 March 2017
/
Accepted: 23 March 2017
/
Published: 1 April 2017
(This article belongs to the Section F: Electrical Engineering)
Abstract
:Power system stabilizers (PSSs) are widely used for suppressing low frequency oscillations in practical power systems. However, according to the requirement of the “guide for setting test of power system stabilizer” of China, PSS gain is limited to no more than 1/3 of its critical gain. As a result, PSSs may not provide enough damping to the inter-area mode oscillations. Through analyzing the Heffron-Phillips (H-P) model of the generator with PSS, it is found that exciter mode will become unstable when PSS exceeds its critical gain. This exciter mode is formed by the natural characteristic of the exciter-PSS loop. To address this problem, a novel PSS with a parallel component added to the conventional PSS is proposed to improve its critical gain. Therefore, large gain can be chosen for the proposed PSS to meet the critical gain requirements of the guide and provide enough damping to the inter-area modes simultaneously. Simulation results on the Ximeng coal power station of China verify the effectiveness of the proposed PSS.
1. Introduction
The interconnection of regional power systems makes the stability of a large-scale power system increasingly important and challenging [1]. Since the power generation sources are usually far away from the load centers in China, huge power need to be delivered from the north or southwest to east China through long transmission lines [2,3,4]. This situation may increase the risk of low frequency oscillations (LFOs) occurring [5]. Thus, damping of inter-area low-frequency oscillations is one of the main concerns in the operation of such power system [6,7].
PSS is a cost-effective way to suppress LFO [8,9]. To improve the performance and adaptability of PSS, lots of intelligent optimization algorithms, such as genetic algorithm [10], grey wolf optimization [11], adaptive particle swarm optimization [12], culture particle swarm optimization co-evolutionary algorithm [13], have been applied for tuning the parameters of PSSs. However, these methods are based on an accurate model of the power system, which is hard to obtain for a practical power system. Moreover, numerous advanced control techniques, such as robust control [14], linear matrix inequality approach [15,16], synergetic control approach [17,18], are proposed to design PSSs, but the structure and parameter tuning of these controllers are far more complicated than those of the conventional PSS (CPSS) and hence not preferred by the engineers and transmission system operators. Consequently, the CPSSs are widely used in the practical power system and still tuned individually by phase compensate method in China [5,19].
However, PSS may have limitations in suppressing LFO under certain circumstances [20,21]. Especially in a bulk power transmission system, PSSs may not provide enough damping to inter-area modes even if they are properly tuned according to the “Guide for setting test of power system stabilizer” standard of China [19]. To let PSSs provide sufficient damping to the concerned oscillations, larger gain is required for the PSSs.
Unfortunately, further increase of the PSS gain may decrease the damping of other modes and results in divergent oscillations [22]. Thus, PSS gain has certain limitations in suppressing LFO. The setting gain of PSS is recommended to be chosen about 1/3 of its critical gain [23,24,25]. Therefore, PSS gain is required to be no more than 1/3 of its critical gain in the “Guide for setting test of power system stabilizer” [19]. That is to say, in a bulk power transmission system, the chosen gain of PSS may not be large enough to provide sufficient damping to the inter-area modes owing to the upper limitation of the critical gain.
To address this problem, mechanism analysis is needed to find out the crucial factors of PSS critical gain. A new PSS with larger critical gain is also required to provide sufficient damping to the inter-area modes in such systems. This paper analyzes the above problem and solutions are also provided to enhance the performance of PSS in suppressing inter-area oscillations. The main contributions of this paper are as follows:
- Mechanism analysis of the phenomenon that PSS may not provide enough damping to inter-area modes due to the limitation of its critical gain is carried out. The analysis results reveal that the damping of exciter mode oscillation limits the critical gain of PSS. The increase of PSS gain may cause unstable exciter mode oscillations because of the natural frequency characteristics of PSS and excitation system.
- A novel PSS (NPSS) is proposed by adding a parallel component on CPSS. It has better phase characteristics in the frequency range of exciter modes so that damping of exciter modes is enhanced. As a result, the critical gain of the NPSS is significantly improved so that NPSS can provide sufficient damping to inter-area modes by increasing its gain.
- Validations of the analysis and control are undertaken by small signal analysis and time domain simulations in the Ximeng bulk power transmission system. Results verify the correctness of the analysis and the effectiveness of the NPSS control. Thus, the problem is solved satisfactorily.
The rest of the paper is organized as follows. The critical gain problem of PSS is described and analyzed in Section 2. Section 3 introduces the structure and parameter setting of the proposed PSS. Case studies are undertaken based on the Ximeng coal power station of China in Section 4. Conclusions are drawn in Section 5.
2. Analysis of the Power System Stabilizer Critical Gain Problem
2.1. Problem Phenomenon
The phenomenon of PSS critical gain problem is described in detail in this subsection. Critical gain is the largest gain of a controller that can maintain a system stable. PSS exceeding its critical gain will cause unstable oscillations. In order to ensure enough stability margin for the PSS control, its gain is restricted to under a certain proportion of its critical gain. According to the “Guide for setting test of power system stabilizer”, the regulation about putting a PSS into operation is that the PSS gain should be no more than 1/3 of its critical gain.
However, the PSS whose gain is determined according to this regulation may not always provide enough damping to inter-area modes. For example, in the Ximeng coal power station of China, if one of the two 1000 kV AC transmission lines from Ximeng to Beijing is tripped because of a three phase short circuit fault, there will occur an inter-area oscillation in the system. Although all the generators are equipped with properly tuned PSSs, power plants in Ximeng will still oscillate against North China Power Grid with a small damping ratio.
In that case, the larger gain is required for all these PSSs to provide sufficient damping to this inter-area oscillation. But if the PSS gain is increased to provide more damping, it will certainly exceed 1/3 of its critical gain. This situation violates the regulations in the guide and the PSS cannot be put into operation. Moreover, turbine governor system may also bring negative damping torque to decrease the damping of the LFO [26], and make this contradiction more serious.
2.2. Problem Mechanism
In order to solve this problem, PSS is required to have higher critical gain to maintain flexibility and adaptability in suppressing LFO. Thus, it is important to investigate the mechanism of destabilizing effect to the system caused by the increase of PSS gain.
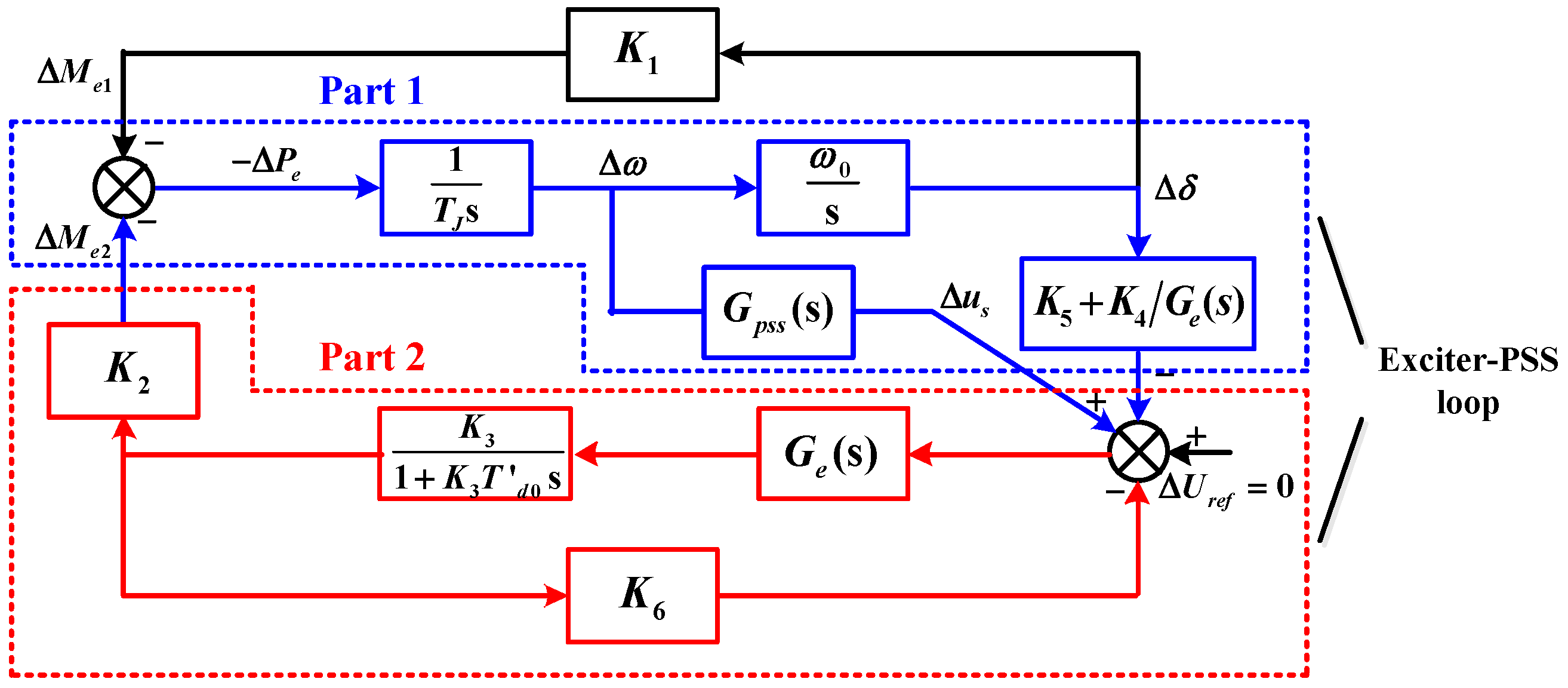
In the following analysis, a self-shunt excitation system with CPSS is used because it is commonly used for a large capacity generator unit. Under such condition, when PSS gain exceeds its critical gain, it will cause an unstable oscillation in the frequency range of 3–8 Hz. By using eigenvalue analysis, this oscillation mode is related to the state variables of PSS and exciter. Thus, it is called exciter mode. That is to say, the increase of PSS gain will cause unstable exciter mode oscillation. Characteristics of the exciter mode can be analyzed by using the Heffron-Phillips (H-P) model of the third-order generator including PSS shown in Figure 1 [8]. The definition of the parameters can be found in [8]. Ge(s) is the transfer function of the exciter and Gpss(s) is the transfer function of PSS. It can be seen that exciter is in the loop of ΔMe2, thus it is reasonable to study the characteristics of exciter mode on this loop. It is called exciter-PSS loop in the later text. This loop is divided into two parts, part 1 is the transfer function from −ΔPe to Δus, and part 2 is the transfer function from ΔUref to ΔMe2.
In part 1, transfer function Gp(s) is paralleled with transfer function Gpss(s), where Gp is represented as:
Since the magnitude of Gp(s) is far less than that of Gpss(s) in the frequency range of 3–8 Hz, the influence of Gp(s) can be neglected. Note that the negative sign of −ΔPe is moved to Δus in Figure 1 in the later analysis, thus the sign of Δus is regarded as negative later.
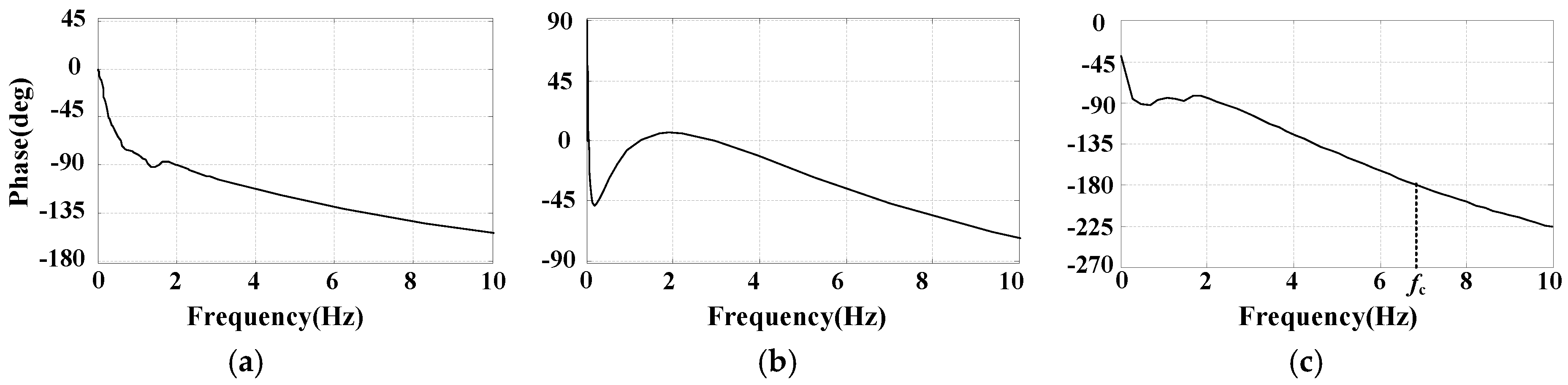
The phase-frequency characteristic of part 2 is shown in Figure 2a. The PSS mainly compensate the phase lag of excitation system in the frequency range of 0.2–2.5 Hz. The phase-frequency characteristic of part 1 is shown in Figure 2b. It can be seen that the phase of part 1 and part 2 decrease monotonically and the sum of their phase lag will cross −180° in the frequency range of 3–8 Hz, as is shown in Figure 2c. The frequency that the phase lag crosses −180° is fc. Taking into account the negative sign of −ΔPe, an oscillation with the frequency of fc injecting from the position of Uref will have the same phase when feeds back to signal us after passing part 2 and part 1. If the magnitude response of the loop reaches 0 dB at fc, it indicates that the feedback signal oscillates the same as the input signal. It means an oscillation with the frequency of fc will not decay in the closed loop system. In other words, an unstable exciter mode oscillation with the frequency of fc will occur in the system. Thus, the loop will reach its critical gain.
To sum up, the increase of the PSS gains will increase the damping ratio of LFOs while at the same time it will decrease the damping ratio of exciter mode. This phenomenon is caused by the phase-frequency characteristics of the exciter-PSS loop in the frequency range of 3–8 Hz. When PSS reaches its critical gain, it will form a positive feedback on the exciter-PSS loop. Therefore, an unstable exciter mode oscillation will occur in the system. In other words, damping of exciter mode oscillation restricts the critical gain of PSS, which further limits the gain of PSS. Consequently, the damping provided by PSS to inter-area modes will be insufficient. Therefore, the PSS should have a higher critical gain to ensure that the PSS can provide enough damping to the inter-area modes.
3. Design of the Novel Power System Stabilizer with High Critical Gain
3.1. Structure of the Novel Power System Stabilizer
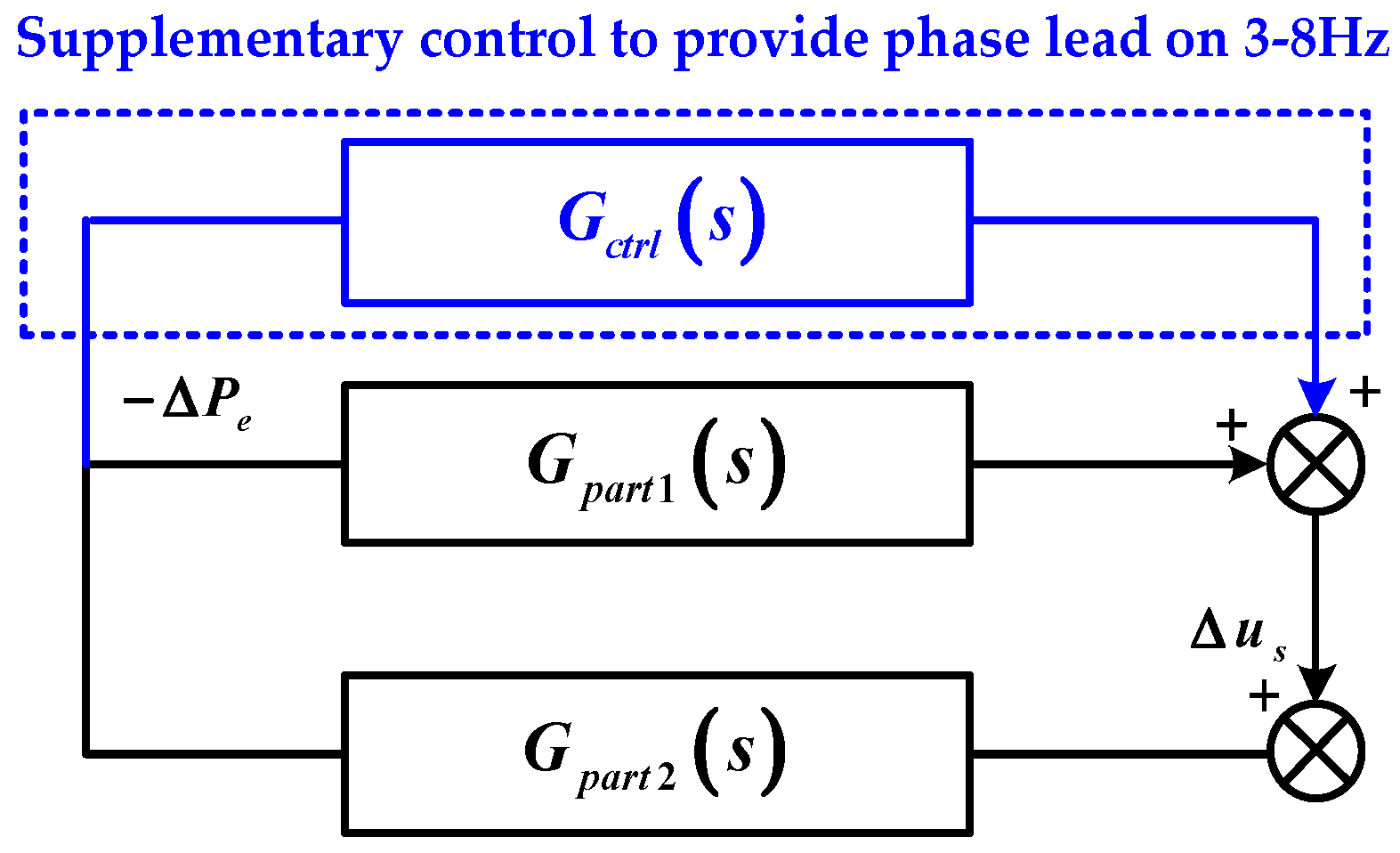
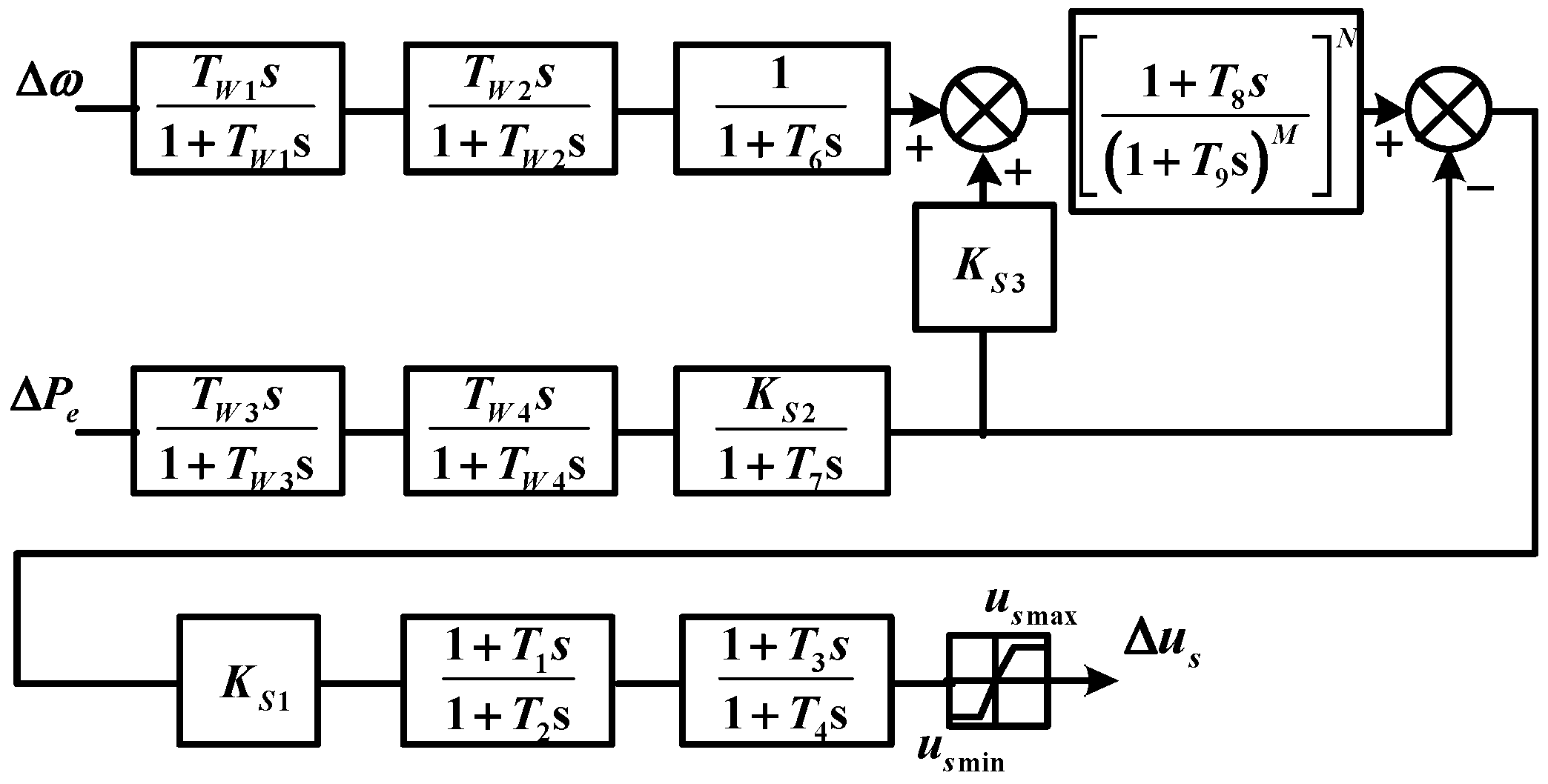
According to the theoretical analysis in Section 2, it is known that characteristic of exciter mode is determined by the frequency characteristics of exciter-PSS loop. This loop is formed by part 1 and part 2 in Figure 1. To improve the damping of exciter mode oscillation, the phase-frequency characteristics of the exciter-PSS loop on high frequencies should be improved. Considering output of part 2 is generator active power, it is hard to put a supplementary control parallel with part 2. But output of part 1 is that of PSS, it directly goes into excitation system. Thus, it is convenient to add a supplementary control on part 1. The diagram of the proposed control is shown in Figure 3.
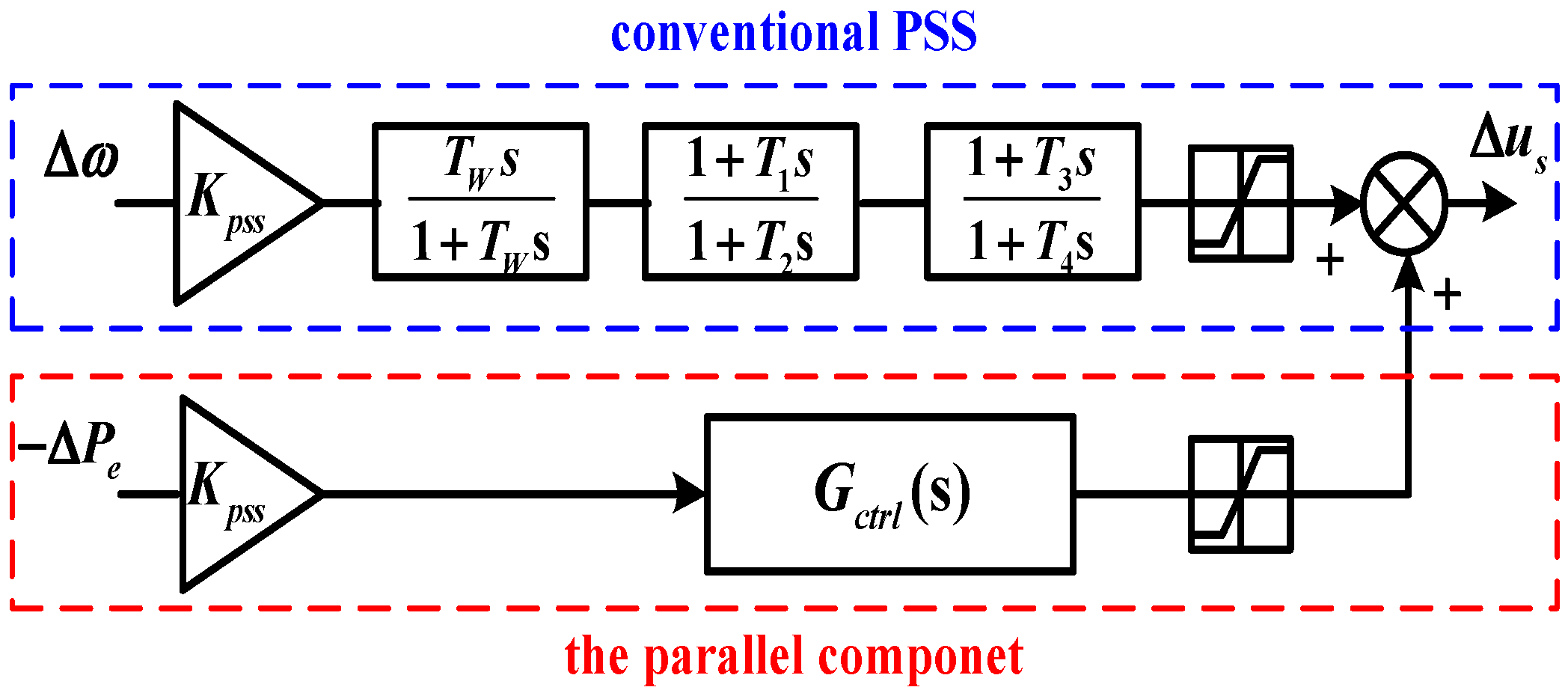
The input of the supplementary control is −ΔPe and its output is Δus. After neglecting , part 1 becomes , so it is reasonable to add this supplementary control on the PSS. Therefore, an NPSS by adding a parallel component on the conventional PSS is proposed. The model of the NPSS is designed as Figure 4 shows.
This parallel component should improve phase lead of PSS in the frequency range of 3–8 Hz but have little influence on the LFOs. In that case, it is reasonable that this component can be designed as a high pass filter as shown in Equation (2):
where Kc is the filter gain and Tc is the time constant.
The output of the NPSS is:
It consists of two parts, the former one is , the latter one is . The former one is the same as the conventional PSS. The latter one is the supplementary control provided by the parallel component. When the frequency of oscillation is low, s is small so that magnitude of the latter one is small that it has little influence on us. It indicates that the former one dominates the NPSS characteristics in the frequency range of LFOs. When s gets into the frequency range of exciter modes, the magnitude of the latter one increases significantly so that it can provide phase lead on part 1. In that case the phase characteristics of part 1 are improved so that the damping of exciter mode is enhanced.
3.2. Parameter Determination of the Proposed Novel Power System Stabilizer
The parallel component added to the PSS has brought two new parameters to be set, they are Tc and Kc. These two parameters can be tuned through Bode analysis. Considering that the component should have enough effect over 3 Hz and little effect under 2.5 Hz simultaneously, Tc should be as small as possible. It can be set to 0.01 s by taking practical limit into account.
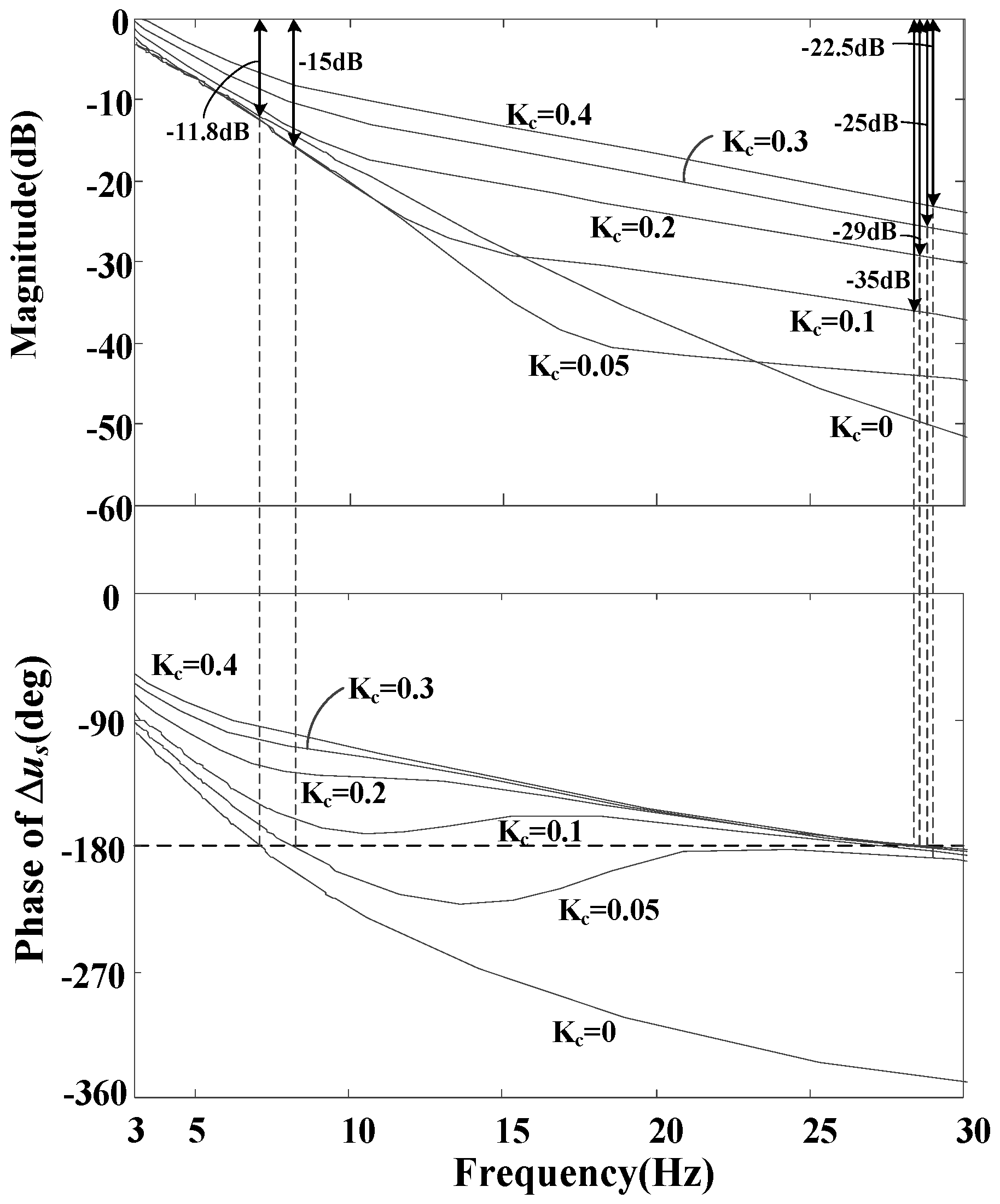
To tune Kc, its influence on the exciter-PSS loop should be investigated first in a single-machine infinite-bus system. The sixth-order generator model and its typical parameters are used to calculate the phase-frequency characteristics of the exciter-PSS loop. The parameters of the generator are shown in Table A1 in the appendix. The proposed PSS is used and the gain Kpss of the NPSS is set to be 10. The open-loop Bode diagram of the exciter-PSS loop in 3–30 Hz frequency range versus the variations of Kc is shown in Figure 5. The improvements of the phase characteristics can be seen with the increasing of Kc. According to the analysis in Section 2, the magnitude of the loop at the frequency where the phase of Δus crosses −180° indicates the critical gain of the system. For example, when Kc = 0.05, the loop magnitude of the frequency where phase of Δus crosses −180° is −15 dB, means the critical gain Kmax is 56. That is 5.6 times of the current gain.
When Kc increases to 0.1, the frequency that phase-frequency characteristic passes through −180° suddenly changes from 8 Hz to 27 Hz. At the same time, the loop magnitude changes from −15 dB to −35 dB. It means that the critical gain of this loop changes from 5.6 times to 56 times of the current gain. That is to say, with the increase of Kc, the frequency that loop phase characteristic crosses −180° gets higher. The magnitude of the loop at such high frequencies is small. Thus, the critical gain of the proposed PSS is significantly improved.
From the above analysis, phase characteristics of the exciter-PSS loop ϕ are determined by Kc. Kc has a minimum value Kcmin that can change the frequency of exciter mode from 8 Hz to 27 Hz. This Kcmin satisfies the condition that ∂2/∂ω2 > 0, ∂ϕ/∂ω = 0 have one solution ω0, and ϕ(ω0)= −180° in the frequency range of 3–30 Hz. Therefore, Kcmin can be acquired by solving the former equations.
From Figure 5, it also can be seen that with the increasing of Kc, the phase lead provided to the system tends to be saturated while the magnitude response of the loop continues to increase. It indicates that the parallel component will bring unbeneficial effect to the system when the value of Kc gets too large. Moreover, the value of Kc should be as small as possible to prevent this component from influencing the phase characteristics in the frequency range of 0.2–2.5 Hz. Besides, Kc should be larger than Kcmin to some extent to ensure its effectiveness. Taking all above into consideration, Kc should be chosen as 1.1–1.2Kcmin.
In the above example, it can be calculated that ϕ will be −180° at ω0 = 69.7 rad/s when Kcmin = 0.091. Then Kc can be chosen as Kc = 1.1 Kcmin = 0.1. In that case, the exciter mode is changed from the frequency range of 3–8 Hz to the frequency range that over 25 Hz. Its critical gain is improved from 5.6 times to 56 times of the current gain. That is to say, critical gain of the NPSS is significantly improved. It makes the chosen gain of NPSS flexible enough to provide sufficient damping and do not exceed 1/3 of its critical gain simultaneously.
4. Case Studies
4.1. Description of the Study System
To validate the effectiveness of the proposed PSS, the Ximeng coal power station of China shown in Figure 6 is built in Matlab/Simulink environment. This test system is a practical system planned to be built in North China, and some of the thermal power plants are already under construction. This system includes four power plants named Duolun, Shengli, Chagan, Keshi, respectively. Duolun and Chagan power plants have three 600 MW generator sets. Shengli and Keshi power plant have two 1000 MW generator sets. Duolun power plant uses two 500 kV transmission lines to deliver power to Ximeng substation, and others use one 1000 kV transmission line to deliver power to Ximemg station each. Those powers are collected in Ximeng station and delivered through two 1000 kV transmission lines to Beijing station. Then the power goes to two equivalent systems through Beijing station. The generation capacity of equivalent system 1 and equivalent system 2 are 173 GW and 174 GW, respectively. The base power of the system is 100 MW.
In this study, generators in Duolun, Shengli, Chagan, Keshi are generating the active power of 5 p.u., 10 p.u., 6 p.u., 10 p.u. The total generation of power is 73 p.u. and about 68 p.u. active power is delivered through the 1000 kV transmission lines between Ximeng and Beijing.
4.2. Stability Characteristics of the System Using Conventional Power System Stabilizers
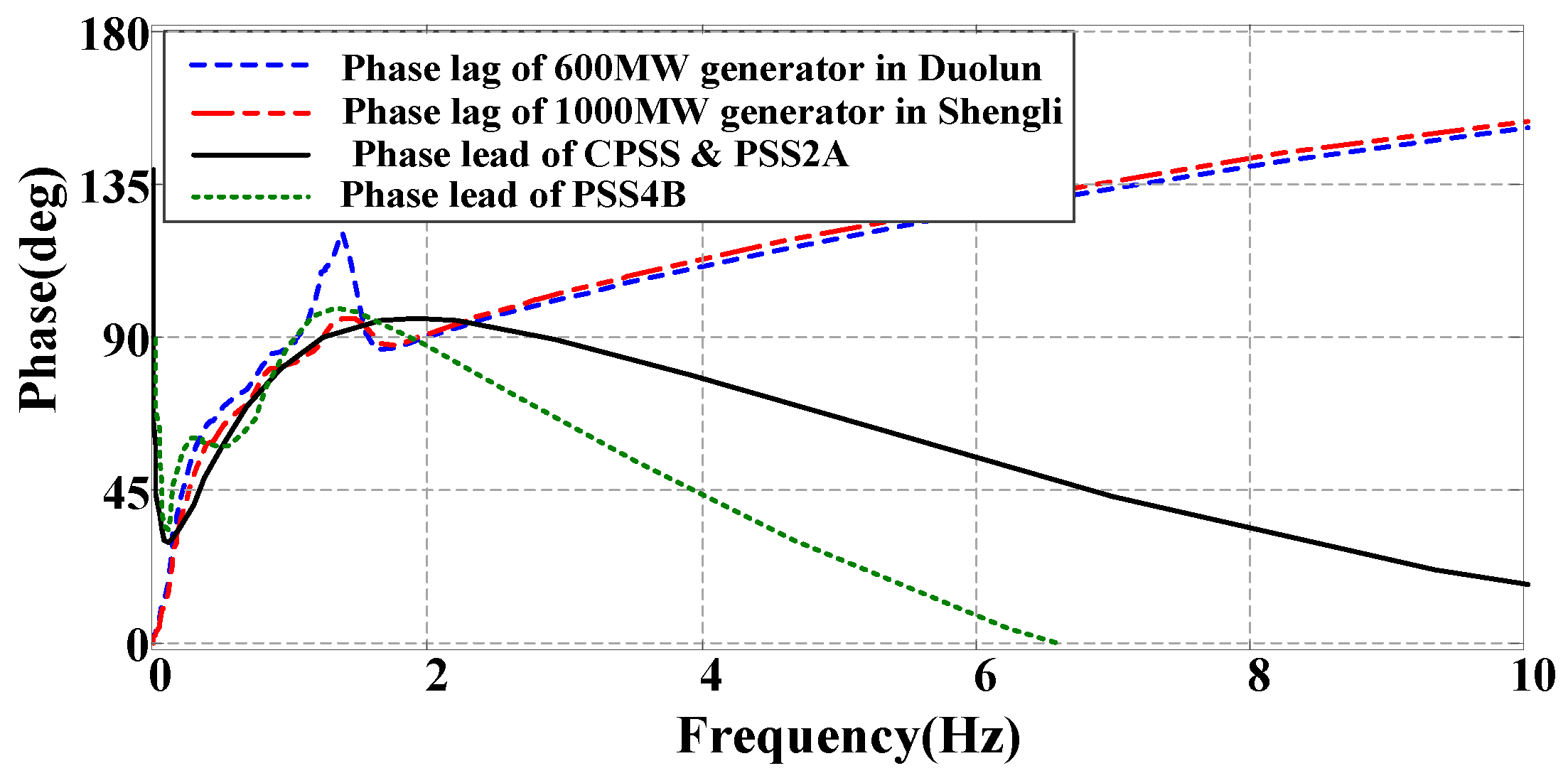
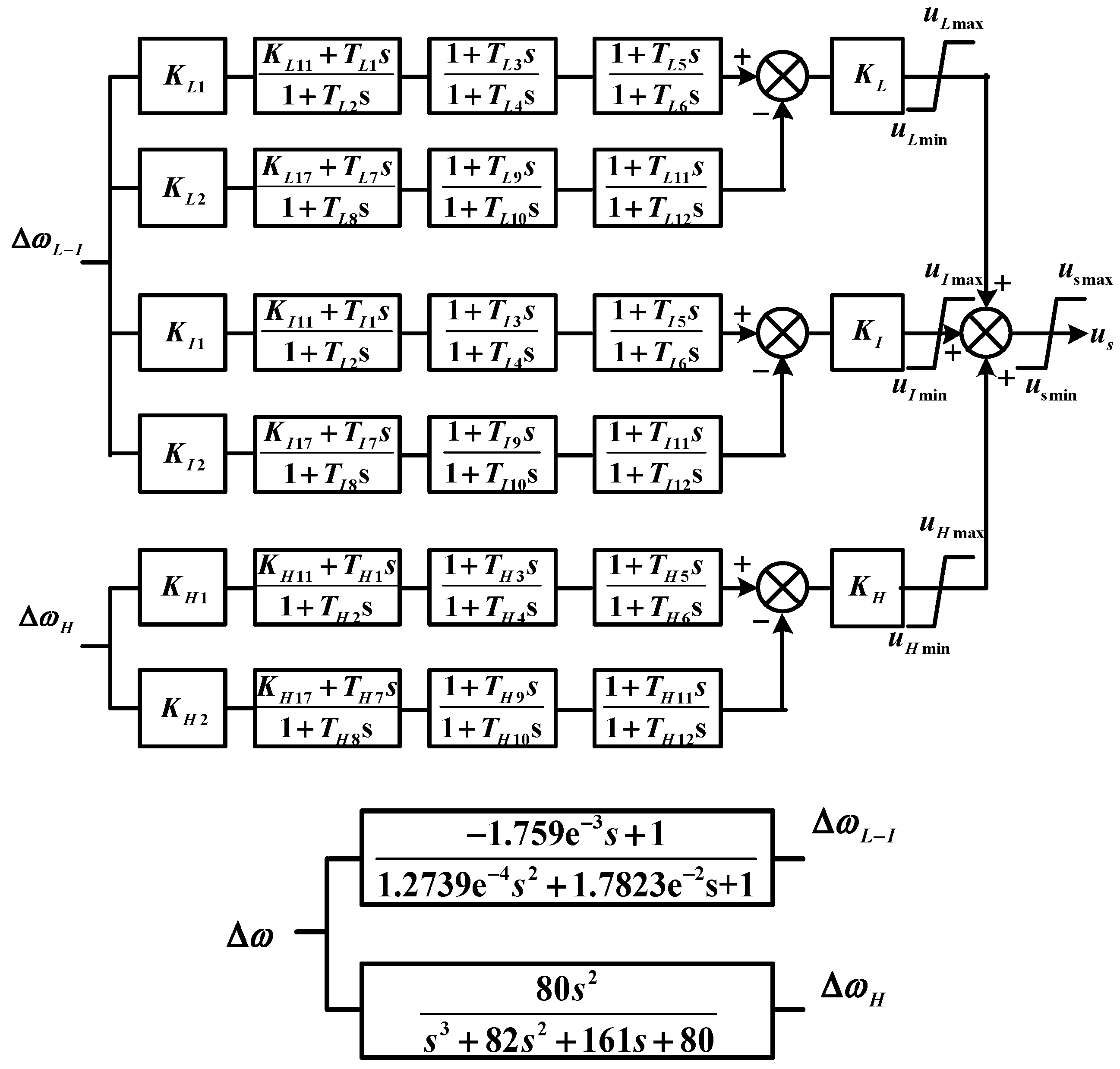
As planned, self-shunt excitation system with CPSS will be installed in all these generators. Through the guide, the phase lead of PSS can be calculated, where T1 = T3 = 0.2 s, T2 = T4 = 0.02 s, TW = 10 s. Considering that PSS2A and PSS4B have also been used in practical power system and are known to have certain advantages towards CPSS [27,28], it is reasonable to firstly compare their performance with CPSS in this system and study whether they will meet this problem. Thus they are also tuned for this system. For PSS2A and PSS4B, their structures are shown in Figure A1 and Figure A2 in the appendix [29]. Their parameters are also displayed in Table A2 and Table A3 in the appendix. For PSS4B, its typical parameters do not provide enough phase lead in high frequency range of LFOs [30]. Thus, the lead-lag parameters of PSS4B are retuned.
The phase characteristics of the PSSs and the phase lag of excitation system are shown in Figure 7. It can be seen that the PSSs well compensate the phase lag of the excitation system.
PSS gain is tuned at the 1/3 of its critical gain, that is Kpss = 10 for CPSS, KS1 = 14 for PSS2A, and KL = 4.28 KI = 17.1 KH = 68.4 for PSS4B. Then small signal stability analysis of the systems is performed and the results of the inter-area modes are shown in Table 1.
It can be seen that the damping is strong when the system operates with two 1000 kV lines. However, the damping ratio of inter-area mode will decrease to 0.023 with the outage of one transmission line, lower than 0.05 required by the guide. Therefore, the PSS gain needs to be set larger to provide enough damping to the system. However, such PSS gain will of course exceed 1/3 of its critical gain and violate the regulations of the guide.
It can also be concluded that PSS2A and PSS4B cannot meet the damping requirement of the system either. This is because that their gain is also limited by the damping of exciter mode oscillation. PSS2A and PSS4B are not designed to enhance the damping of exciter mode oscillations. In the frequency range of 3–8 Hz, frequency characteristics of PSS2A and PSS4B is similar to CPSS so that they will also meet this problem.
If the gain of PSS is retuned to ensure that the damping ratio of the inter-area mode is over 0.05, it has to be set at Kpss = 12. Small signal stability of the system is analyzed and results are shown in Table 2. Results of the small signal stability analysis at three times this gain are shown in Table 3. Note that there are several unstable exciter modes in the system. That is to say, the CPSSs cannot satisfy the damping ratio and critical gain requirement in the guide simultaneously.
4.3. Stability Characteristics of the System Using NPSS
All the CPSSs are replaced by the NPSSs. Tc is set to be 0.01 s, and Kcmin is calculated to be 0.11. Thus Kc = 1.1 Kcmin = 0.12. Comparisons results of the system small signal stability by using CPSSs and NPSSs respectively are shown in Table 4.
For the CPSS, it reaches its critical gain at Kpss = 30. An unstable exciter mode oscillation of 6.93 Hz will occur in the system if Kpss gets over 30. For the NPSS, the critical gain is rather high, and the system will remain stable until Kpss reaches 350. The frequency of the exciter mode changes from 6.93 Hz to 27.3 Hz.
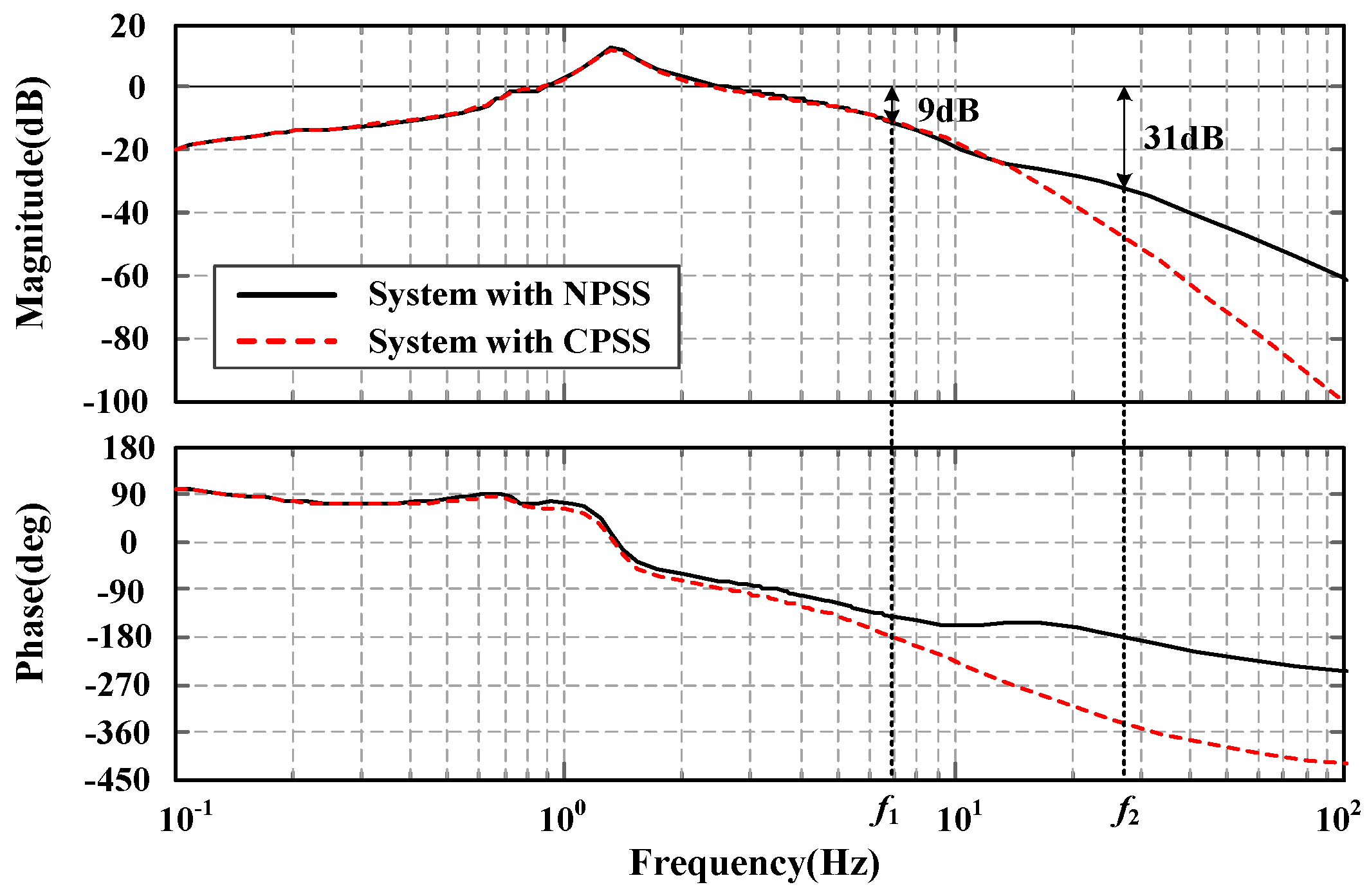
Figure 8 shows the comparison of bode diagram between the system using CPSSs and NPSSs at Kpss = 10. Two PSSs have little difference from 0.1 Hz to 2 Hz, it indicates that their performances in the frequency range of LFO are nearly the same. However, when frequency gets over 4 Hz, phase characteristics of the NPSS get higher than the CPSS. The frequency that system phases cross −180° is changed from f1 to f2. At the frequency of f2, the magnitude of the loop is −31 dB. It indicates that the critical gain is 35 times of Kpss = 10.
Small signal analysis indicates that the gain of NPSS can be set larger to provide more damping to the system. To make the damping ratio of the inter-area mode over 0.15 under single line condition, the gain of NPSS Kpss is set to be 20. Small signal stability of the system is shown in Table 5, where Kmax is the critical gain.
The damping ratio of the inter-area mode is 0.223 under two transmission lines and 0.151 under single transmission line. The critical gain is 17.5 times higher than 20. That is to say, the NPSS can satisfy the damping ratio and critical gain requirement in the guide simultaneously.
4.4. Nonlinear Simulation Validation
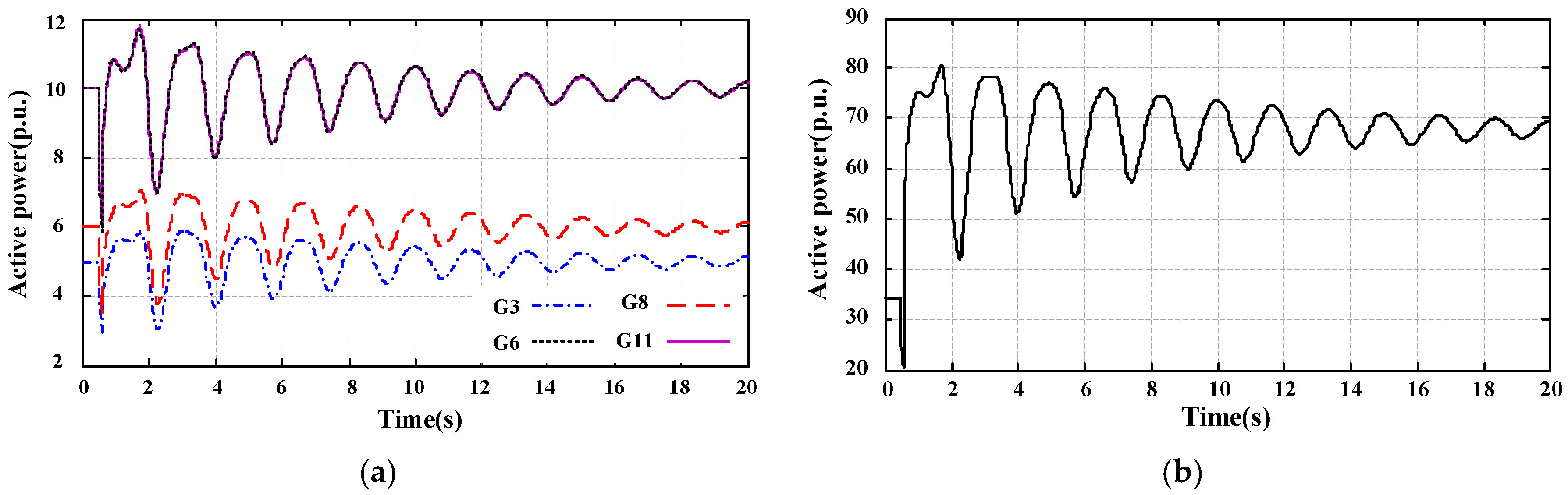
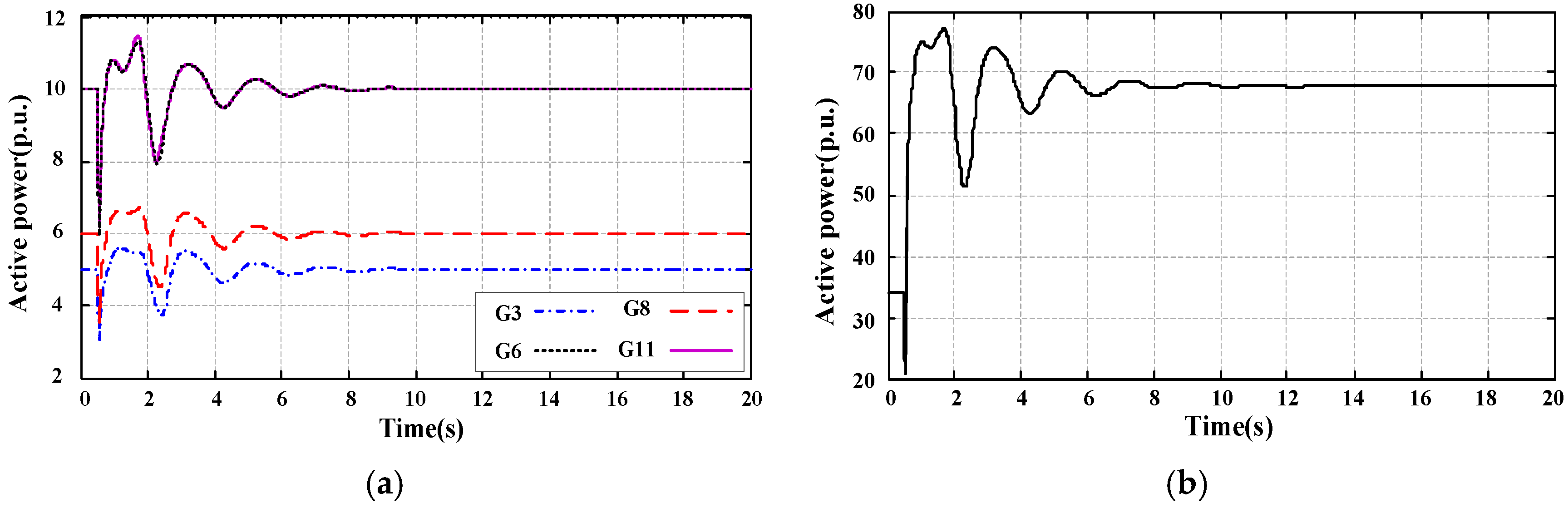
Time domain simulations are undertaken to validate the former small signal analysis. A three phase short circuit fault occurs on one of the two 1000 kV transmission lines from Ximeng to Beijing at t = 0.5s, after 0.1 s the faulty line is tripped from the system. Active power of G3 using CPSS, PSS2A and PSS4B are shown in Figure 9. An inter-area oscillation with weak damping occurs after the fault with PSSs operating in the system. Neither of CPSS, PSS2A or PSS4B can mitigate the inter-area mode effectively under 1/3 of their critical gain. Dynamic response of each power plant and the rest 1000 kV transmission line between Ximeng and Beijing is shown in Figure 10. It can be seen that active power of G3, G6, G8 and G11 is coherent in the system dynamic response. It is because the N-1 fault on the transmission line excites the inter-area oscillation between Ximeng power plant and the equivalent system 2. The power of the rest line from Ximeng to Beijing increases from 34 p.u. to 68 p.u. This makes the load on the rest 1000 kV line extremely heavy so that the damping of the inter-area oscillation becomes very poor.
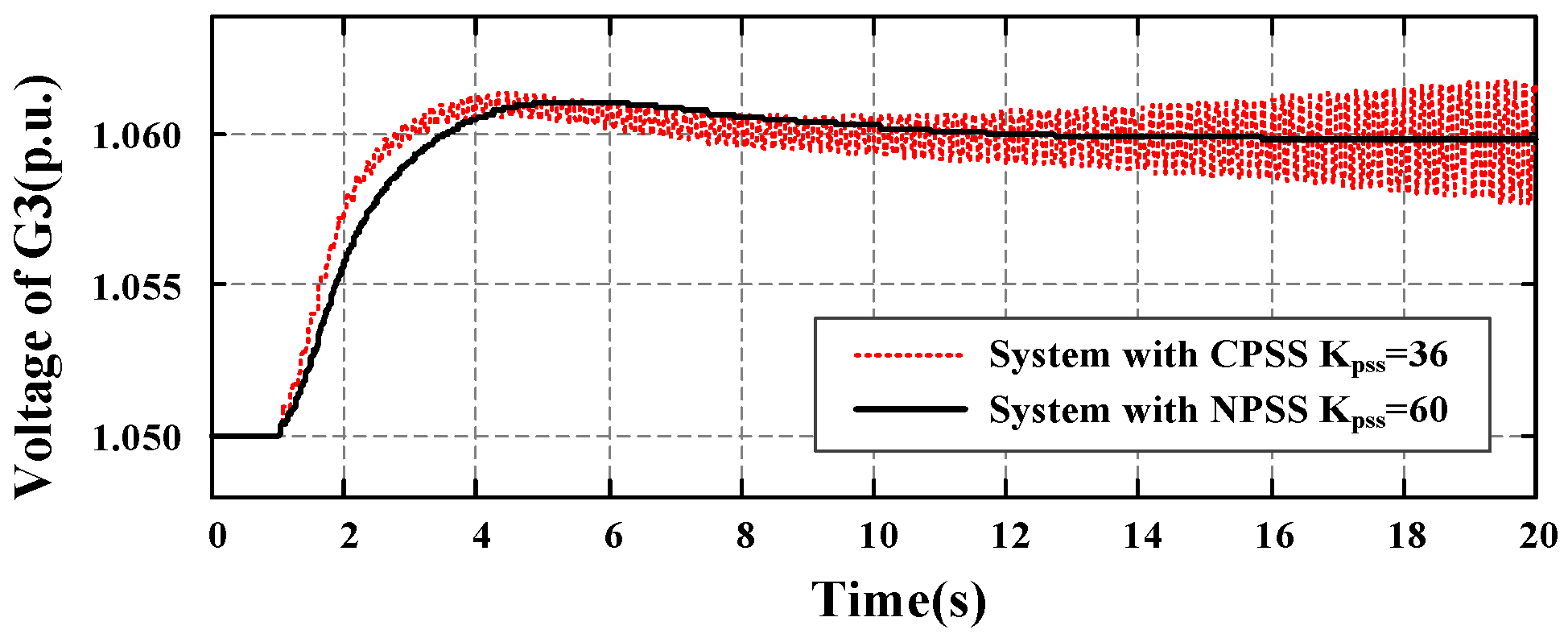
This oscillation lasts more than 20 s. If the PSS gain is increased to Kpss = 12 to provide more damping to the inter-area mode, the exciter mode will get unstable at 3 times of the current gain (Kpss = 36), as shown in Figure 11.
While using the NPSS, the PSS gain Kpss is set to be 20, and system response after the N-1 fault is shown in Figure 12. The inter-area mode attenuates fast and disappears in 10 s. Moreover, the system is stable at 3 times of the current gain (Kpss = 60), as shown in Figure 11.
In conclusion, the NPSS moves the frequency of exciter mode from 3–8 Hz to over 20 Hz while having the same performance with CPSS under the frequency range of LFOs. Taking the advantage of low magnitude characteristic of the system on high frequency, the NPSS improves the critical gain significantly. Thus, the NPSS can simply and effectively satisfy both the damping ratio and critical gain requirement of the guide.
5. Conclusions
This paper investigates a problem that PSSs may not provide enough damping to inter-area modes due to the limitation of its gain in a bulk power transmission system. In such system, PSS gain is restricted to a certain level and thus limits the damping it can provide to the inter-area modes. It is because the increase of PSS gain will make destabilizing effect on the exciter mode oscillation. Critical gain of PSS is thus limited by the damping of exciter mode oscillation. Bode analysis through H-P model reveals that the natural phase characteristics of PSS and excitation system will form a positive feedback in the frequency range of 3–8 Hz. This characteristic is responsible for the destabilizing effect PSS bring to the exciter mode oscillation.
To solve this problem, a novel PSS is proposed in this paper. Through introducing a parallel high pass component on a CPSS, the NPSS raises the phase characteristic of exciter-PSS loop in the frequency range of 3 to 8 Hz and the frequency of exciter mode is changed to over 20 Hz. The magnitude response of the system is quite low at that frequency. Therefore, the critical gain of PSS is improved significantly.
Simulation results in the Ximeng power system verify the correctness of the analysis and the effectiveness of the NPSS. Compared to the CPSS whose critical gain is only three times of Kpss = 10, the critical gain of the NPSS is 35 times of Kpss = 10. The critical gain is significantly improved by using the NPSS. Thus, it is more flexible to choose the PSS gain to provide enough damping to the system. When Kpss = 20 is chosen for the NPSS, the damping ratio of inter-area mode can still be 0.15 after one of the 1000 kV transmission lines from Ximeng to Beijing trips owing to an three phase short circuit fault. The critical gain of NPSS is 17.5 times of Kpss = 20. Thus, the NPSS can satisfy the critical gain requirement of the guide. In conclusion, the NPSS can provide enough damping and satisfy the critical gain requirement in the guide simultaneously.
Acknowledgments
This work was supported by National Natural Science Foundation of China (51577075).
Author Contributions
Ziquan Liu built the dynamic model of the system and performed the analysis and simulations. This work was carried out under the advisement of and with regular feedback from Wei Yao and Jinyu Wen. All authors carried out data analysis, discussed the results and contributed to writing the paper.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
In addition to the instructions of the simulation studies, parameters of a typical generator, PSS2A and PSS4B are given in the following tables. Models of PSS2A and PSS4B are shown in Figure A1 and Figure A2.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Parameters of a typical generator.
| Xd | Xq | X’d | X’q | X”d | X”q |
|---|---|---|---|---|---|
| 1.9341 | 1.9341 | 0.26 | 0.42 | 0.21 | 0.1985 |
| T’d0 | T’q0 | T”d0 | T”q0 | TJ | - |
| 9.7 s | 1 s | 0.07 s | 0.13 s | 8 s | - |
Table A2.
Parameters of the PSS2A.
| TW1 | 10 s | T8 | 0.6 s | KS2 | 1 |
| TW2 | 10 s | T9 | 0.12 s | KS3 | 1 |
| TW3 | 10 s | T1 | 0.2 s | usmax | 0.1 |
| TW4 | 10 s | T2 | 0.02 s | usmin | −0.1 |
| T6 | 0 s | T3 | 0.2 s | M | 5 |
| T7 | 8 s | T4 | 0.02 s | N | 1 |
Table A3.
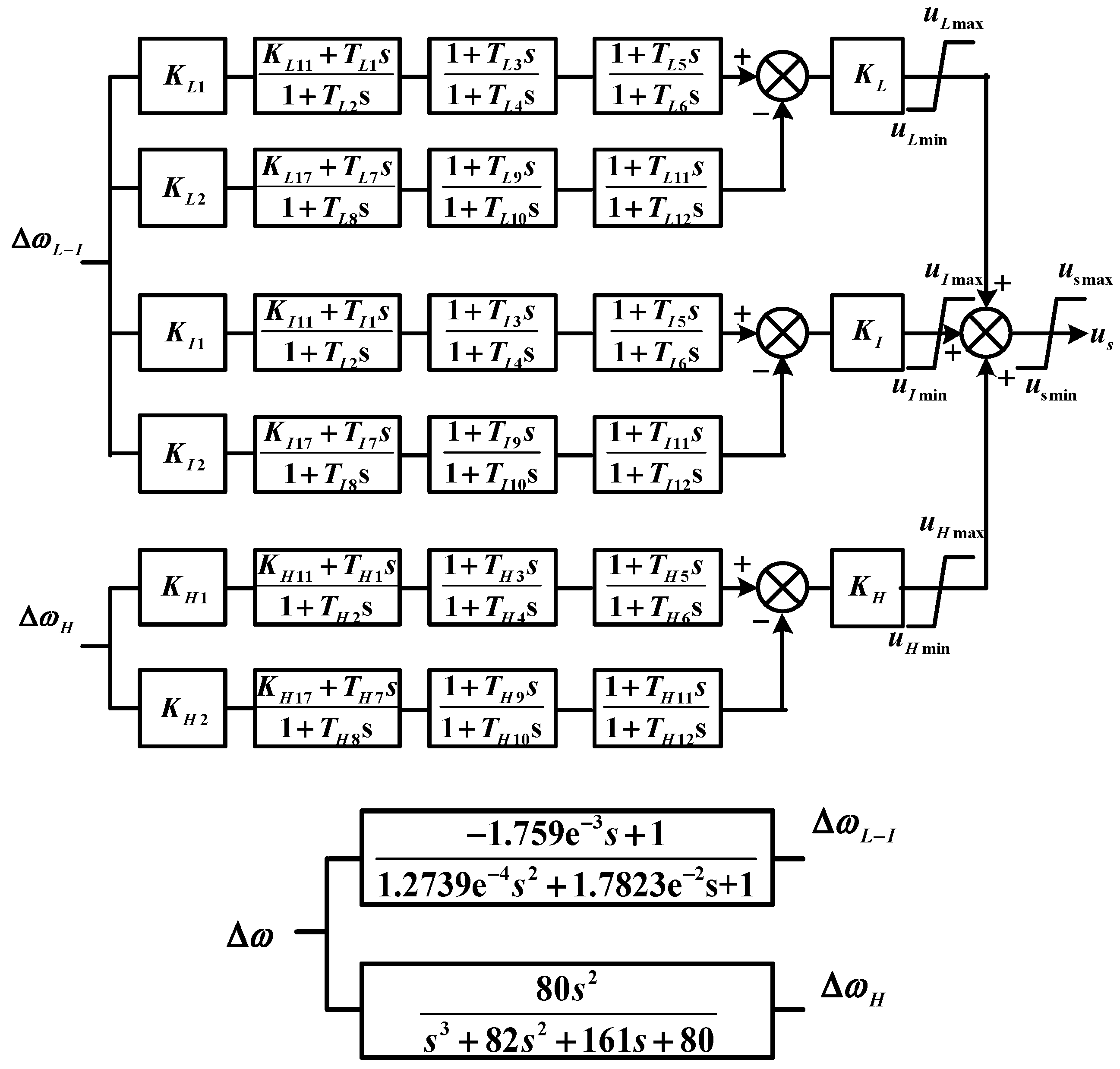
Parameters of the PSS4B.
| KL1 KL2 | 66 | TI1 | 0.173 s | TH3 TH9 | 0.38 s |
| KI1 KI2 | 66 | TI2 | 0.2075 s | TH4 TH10 | 0.21 s |
| KH1 KH2 | 66 | TI7 | 0.2075 s | TH5 TH11 | 0.15 s |
| KL11 KL17 | 1s | TI8 | 0.2491 s | TH6 TH12 | 0.07 s |
| KI11 KI17 | 1s | TH1 | 0.01513 s | uLmax uLmin | ±0.075 |
| KH11 KH17 | 1s | TH2 | 0.01815 s | uImax uImin | ±0.15 |
| TL1 | 1.73 s | TH7 | 0.01815 s | uHmax uHmin | ±0.15 |
| TL2 | 2.075 s | TH8 | 0.02179 s | usmax usmin | ±0.15 |
| TL7 | 2.075 s | TL3 TL9 | 0.25 s | - | - |
| TL8 | 2.491 s | TL4 TL10 | 0.2 s | - | - |
Figure A1.
Structure of PSS2A.
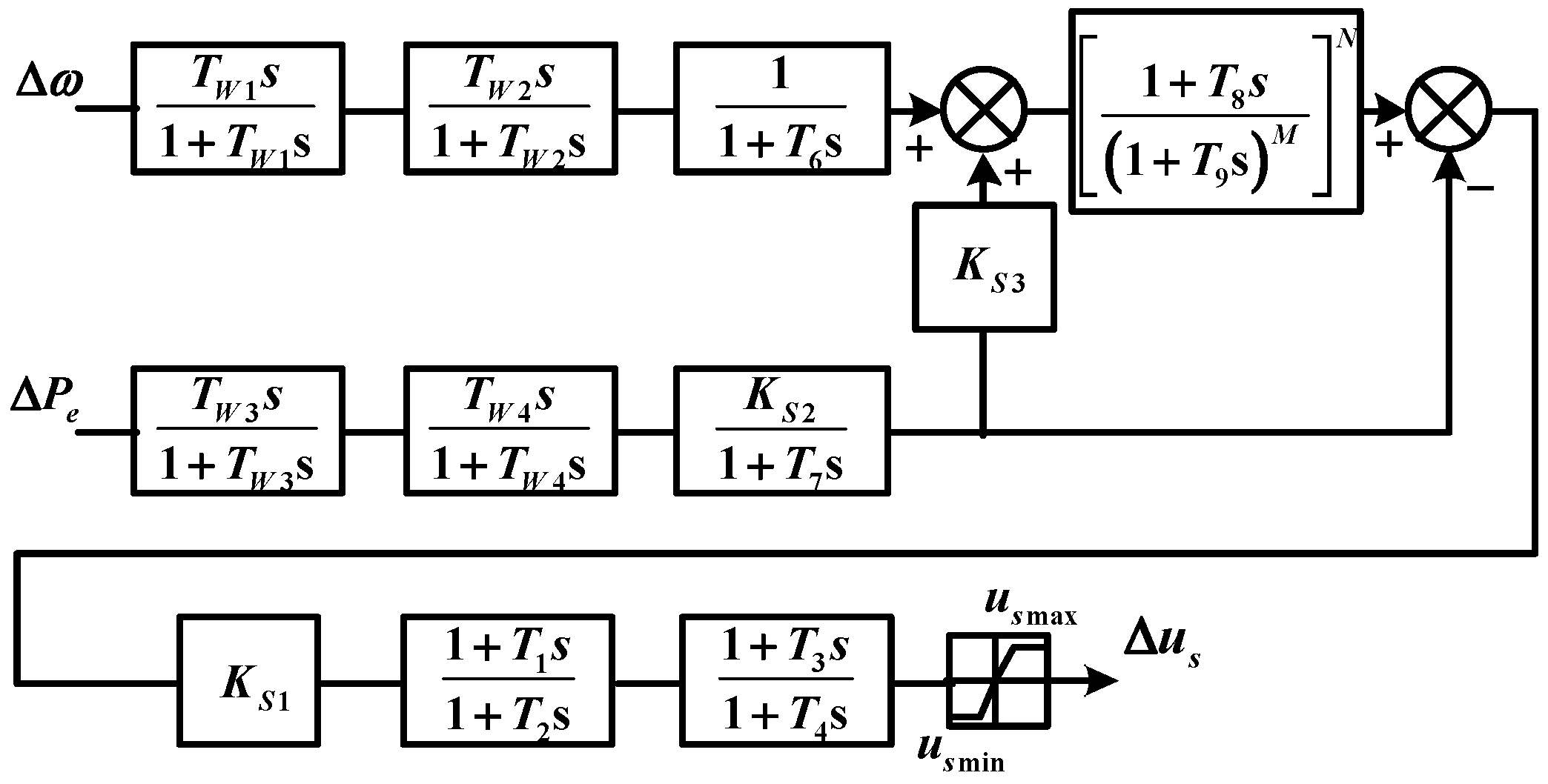
Figure A2.
Structure of PSS4B.
References
- Shi, X.; Wang, S.; Yao, W.; Waqar, A.; Zuo, W.; Tang, Y. Mechanism analysis and experimental validation of employing superconducting magnetic energy storage to enhance power system stability. Energies 2015, 8, 656–681. [Google Scholar] [CrossRef]
- Mao, X.; Zhang, Y.; Guan, L.; Wu, X. Coordinated control of inter-area oscillation in the China Southern power grid. IEEE Trans. Power Syst. 2006, 21, 845–852. [Google Scholar]
- Yu, W.; Xue, Y.; Luo, J.; Ni, M.; Tong, H.; Huang, T. An UHV grid security and stability defense system: Considering the risk of power system communication. IEEE Trans. Smart Grid. 2016, 7, 491–500. [Google Scholar] [CrossRef]
- Cai, G.; Yang, D.; Liu, C. Adaptive wide-area damping control scheme for smart grids with consideration of signal time delay. Energies 2013, 6, 4841–4858. [Google Scholar] [CrossRef]
- Liu, Q. Power System Stability and Excitation Control; China Electric Power Press: Beijing, China, 2007; pp. 136–144. [Google Scholar]
- Yao, W.; Jiang, L.; Wen, J.Y.; Wu, Q.H.; Cheng, S.J. Wide-area damping controller for power system inter-area oscillations: A networked predictive control approach. IEEE Trans. Control Syst. Technol. 2015, 23, 27–36. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.Y.; Wu, Q.H.; Cheng, S.J. Wide-area damping controller of FACTS devices for inter-area oscillations considering communication time delays. IEEE Trans. Power Syst. 2014, 29, 318–329. [Google Scholar] [CrossRef]
- Rogers, G. Power System Oscillations; Kluwer Academic Publishers: Boston, MA, USA, 2000; p. 171. [Google Scholar]
- He, P.; Wen, F.; Ledwich, G.; Xue, Y.; Wang, K. Effects of various power system stabilizers on improving power system dynamic performance. Int. J. Electr. Power Energy Syst. 2013, 46, 175–183. [Google Scholar] [CrossRef]
- Hassan, L.H.; Moghavvemi, M.; Almurib, H.A.F.; Muttaqi, K.M. Coordinated design of PSSs and UPFC-based stabilizer using genetic algorithm. IEEE Trans. Ind. Appl. 2014, 50, 2957–2966. [Google Scholar] [CrossRef]
- Shakarami, M.R.; Davoudkhani, I.F. Wide-area power system stabilizer design based on grey wolf optimization algorithm considering the time delay. Electr. Power Syst. Res. 2016, 133, 149–159. [Google Scholar] [CrossRef]
- Sunkara, S.K.; Narne, R.; Panda, P.C. Coordinated tuning of PSS with TCSC damping controller through advanced adaptive PSO for a multi-machine power system. In Proceedings of the 2013 International Conference on Energy Efficient Technologies for Sustainability (ICEETS), Nagercoil, India, 10–12 April 2013; pp. 1097–1102. [Google Scholar]
- Khodabakhshian, A.; Hemmati, R.; Moazzami, M. Multi-band power system stabilizer design by using CPCE algorithm for multi-machine power system. Electr. Power Syst. Res. 2013, 101, 36–48. [Google Scholar] [CrossRef]
- Soliman, H.M.; Yousef, H.A. Saturated robust power system stabilizers. Int. J. Electr. Power Energy Syst. 2015, 73, 608–614. [Google Scholar] [CrossRef]
- Soliman, M.; Elshafei, A.L.; Bendary, F.; Mansour, W. Robust decentralized PID-based power system stabilizer design using an ILMI approach. Electr. Power Syst. Res. 2010, 81, 1488–1497. [Google Scholar] [CrossRef]
- Tang, K.; Venayagamoorthy, G.K. An LMI-SSI model based PSS design approach for a multi-machine power system. In Proceedings of the Clemson University Power Systems Conference, Clemson, SC, USA, 10–13 March 2015; pp. 1–7. [Google Scholar]
- Zhao, P.; Yao, W.; Wang, S.R.; Wen, J.Y.; Cheng, S.J. Decentralized nonlinear synergetic power system stabilizers design for power system stability enhancement. Int. Trans. Electr. Energy Syst. 2014, 24, 1356–1368. [Google Scholar] [CrossRef]
- Bouchama, Z.; Harmas, M.N. Optimal robust adaptive fuzzy synergetic power system stabilizer design. Electr. Power Syst. Res. 2012, 83, 170–175. [Google Scholar] [CrossRef]
- Guide for Setting Test of Power System Stabilizer; Std DL/T 1231-2013; National Energy Administration of China: Beijing, China, 2013.
- Shahgholian, G.; Faiz, J. Coordinated control of power system stabilizer and FACTS devices for dynamic performance enhancement—State of art. In Proceedings of the 2016 2nd International Conference on Intelligent Energy and Power Systems (IEPS), Kyiv, Ukraine, 7–11 June 2016; pp. 1–6. [Google Scholar]
- Shayeghil, H.; Moradzadeh, M.; Ghasemi, A.; Vandevelde, L. Simultaneous optimal placement and parameter-tuning of SVC, TCSC and PSS using honey-bee mating optimization. In Proceedings of the 2013 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Hongkong, China, 8–11 December 2013; pp. 1–5. [Google Scholar]
- Mobarak, M.; Thorne, D.; Hill, E. Optimization of exciter and stabilizer parameters of a large thermal generating station. IEEE Trans. Power Appar. Syst. 1978, PAS-97, 1182–1193. [Google Scholar] [CrossRef]
- Larsen, E.V.; Swann, D.A. Applying power system stabilizers part II: Performance objectives and tuning concepts. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 3025–3033. [Google Scholar] [CrossRef]
- Murdoch, A.; Venkataraman, S.; Lawson, R.A.; Pearson, W.R. Integral of accelerating powertype PSS I: Theory, design, and tuning methodology. IEEE Trans. Energy Convers. 1999, 14, 1658–1663. [Google Scholar] [CrossRef]
- Chung, C.Y.; Tse, C.T.; Wang, K.W.; Niu, R. PSS design for multi-area system based on combined sensitivity concept. In Proceedings of the IEEE International Conference on Power System Technology, Perth, Australia, 4–7 December 2000; pp. 1197–1202. [Google Scholar]
- Gencoglu, C.; Tor, O.B.; Cebeci, E.; Yilmaz, O.; Guven, A.N. Assessment of the effect of hydroelectric power plants’ governor settings on low frequency inter area oscillations. In Proceedings of the IEEE International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010; pp. 1–8. [Google Scholar]
- Bollinger, K.E.; Gu, W.; Norum, E. Accelerating power versus electrical power as input signals to power system stabilizers. IEEE Trans. Energy Convers. 1991, 6, 610–626. [Google Scholar] [CrossRef]
- Kamwa, I.; Grondin, R.; Trudel, G. IEEE PSS2B versus PSS4B: The limits of performance of modern power system stabilizers. IEEE Trans. Power Syst. 2005, 20, 903–915. [Google Scholar] [CrossRef]
- IEEE Recommended Practice for Excitation System Models for Power System Stability Studies; IEEE Std 421.5-2016; IEEE Power and Energy Society: New York, NY, USA, 2016.
- Zhao, X.; Xie, H.; Lu, S.; Liu, G.; Wu, T.; Su, W.; Shi, Y.; Yang, B.; Li, W. Parameter setting and on-site test of power system stabilizer—PSS4B. Power Syst. Technol. 2016, 40, 508–513. [Google Scholar]
Figure 1.
The Heffron-Phillips (H-P) model of the third-order generator including power system stabilizer (PSS).
Figure 1.
The Heffron-Phillips (H-P) model of the third-order generator including power system stabilizer (PSS).
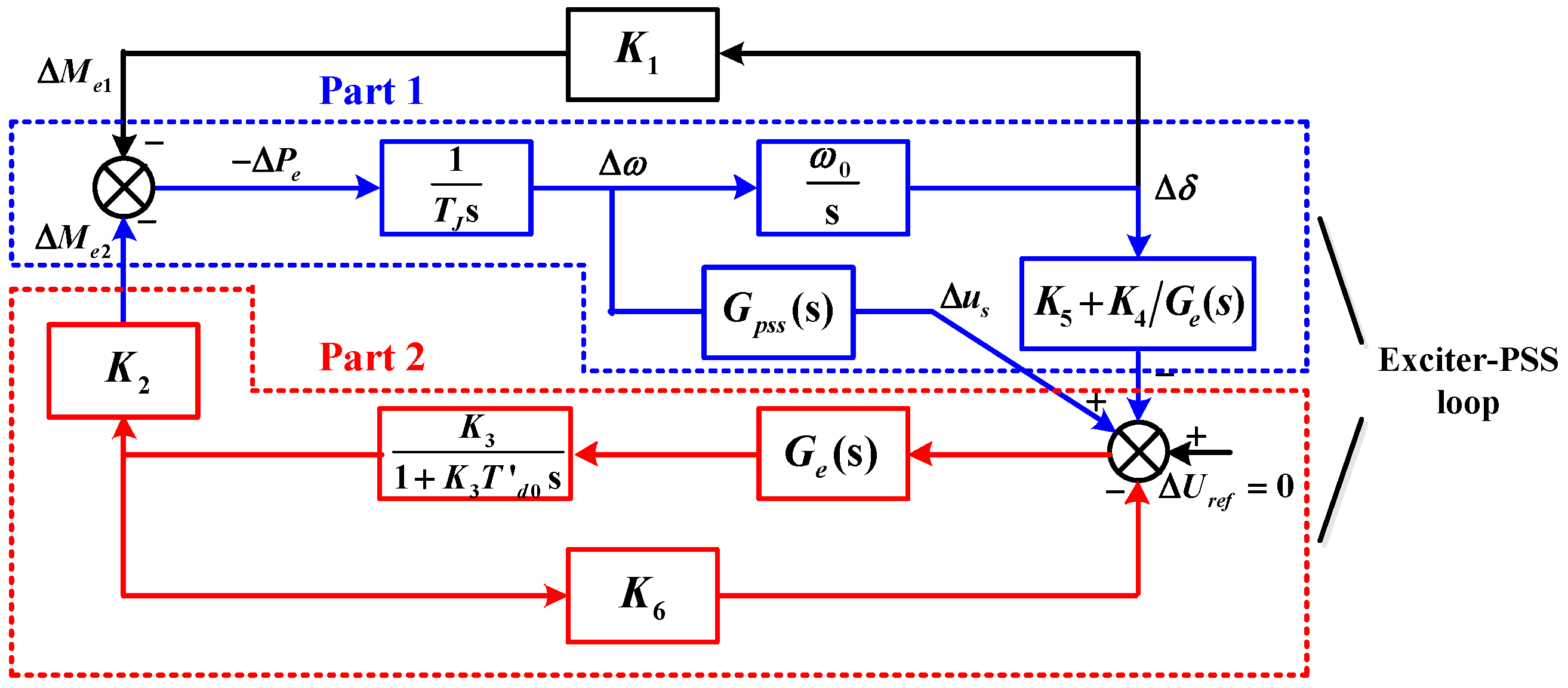
Figure 2.
Phase response of the exciter-PSS loop. (a) Phase characteristics from ΔUref to ΔMe2; (b) phase characteristics from –ΔPe to Δus; and (c) the sum of phase lag of part 1 and part 2.
Figure 2.
Phase response of the exciter-PSS loop. (a) Phase characteristics from ΔUref to ΔMe2; (b) phase characteristics from –ΔPe to Δus; and (c) the sum of phase lag of part 1 and part 2.
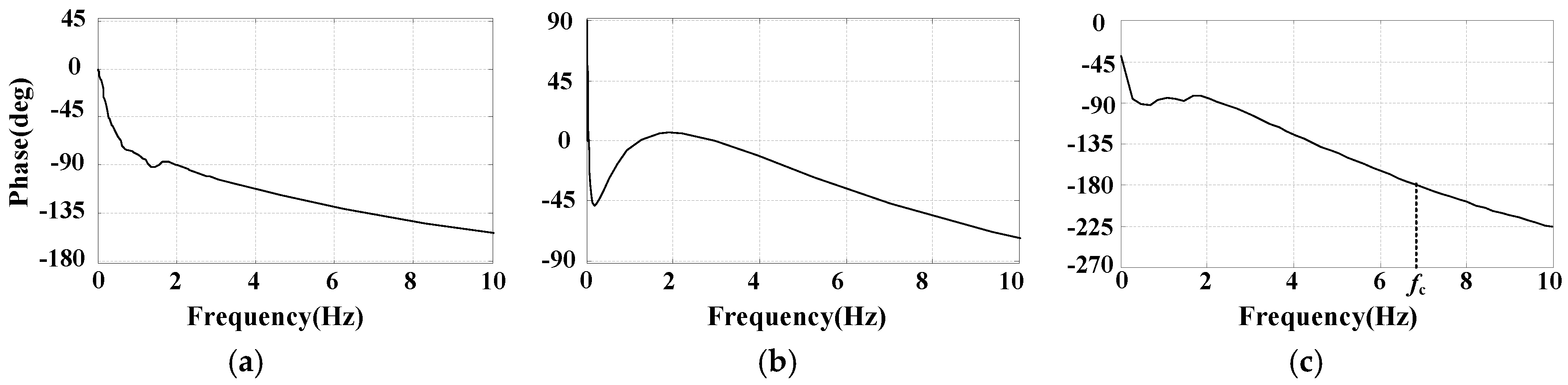
Figure 3.
Diagram of the supplementary control for enhancing damping of exciter mode.
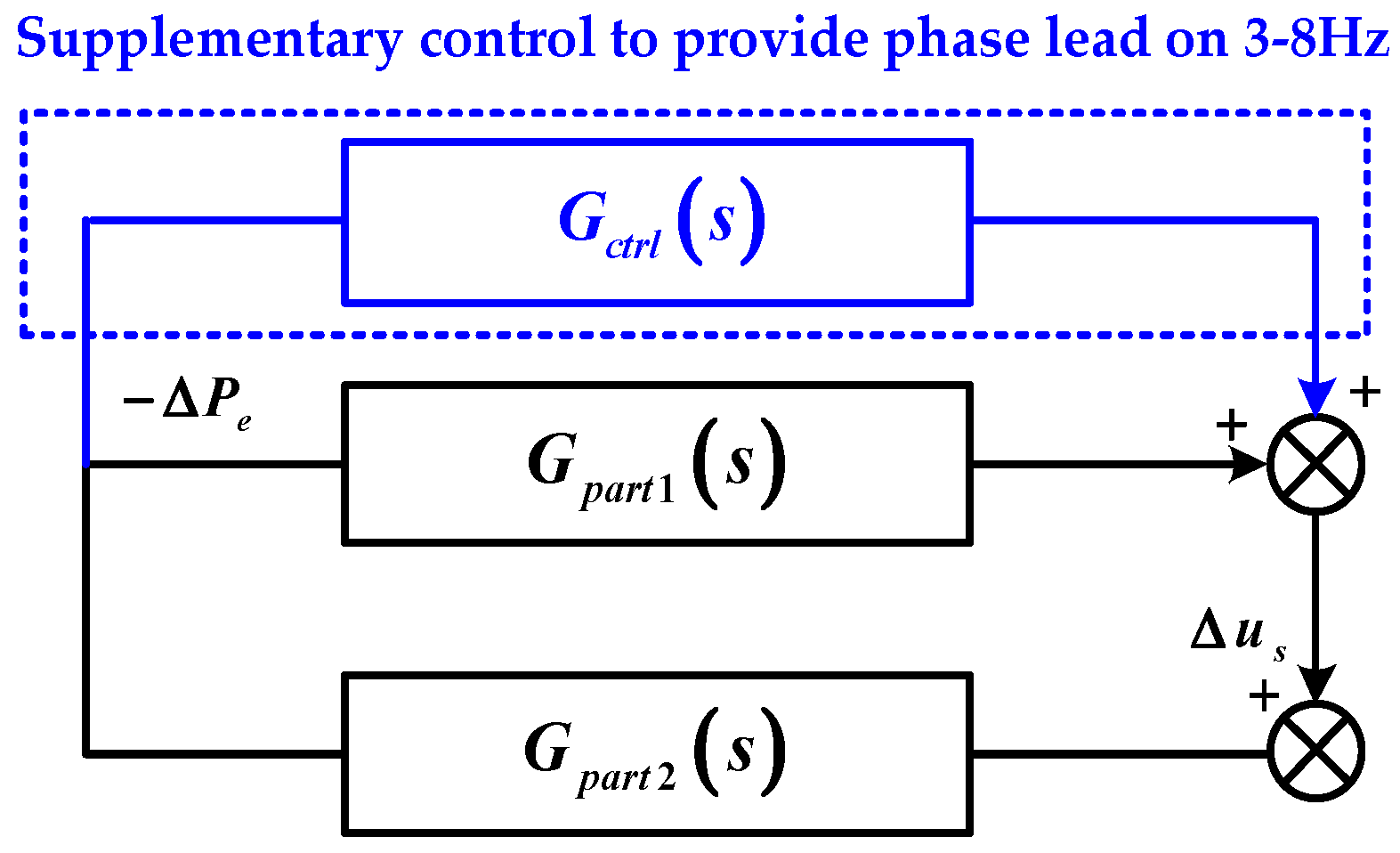
Figure 4.
Model of the novel power system stabilizer (NPSS).
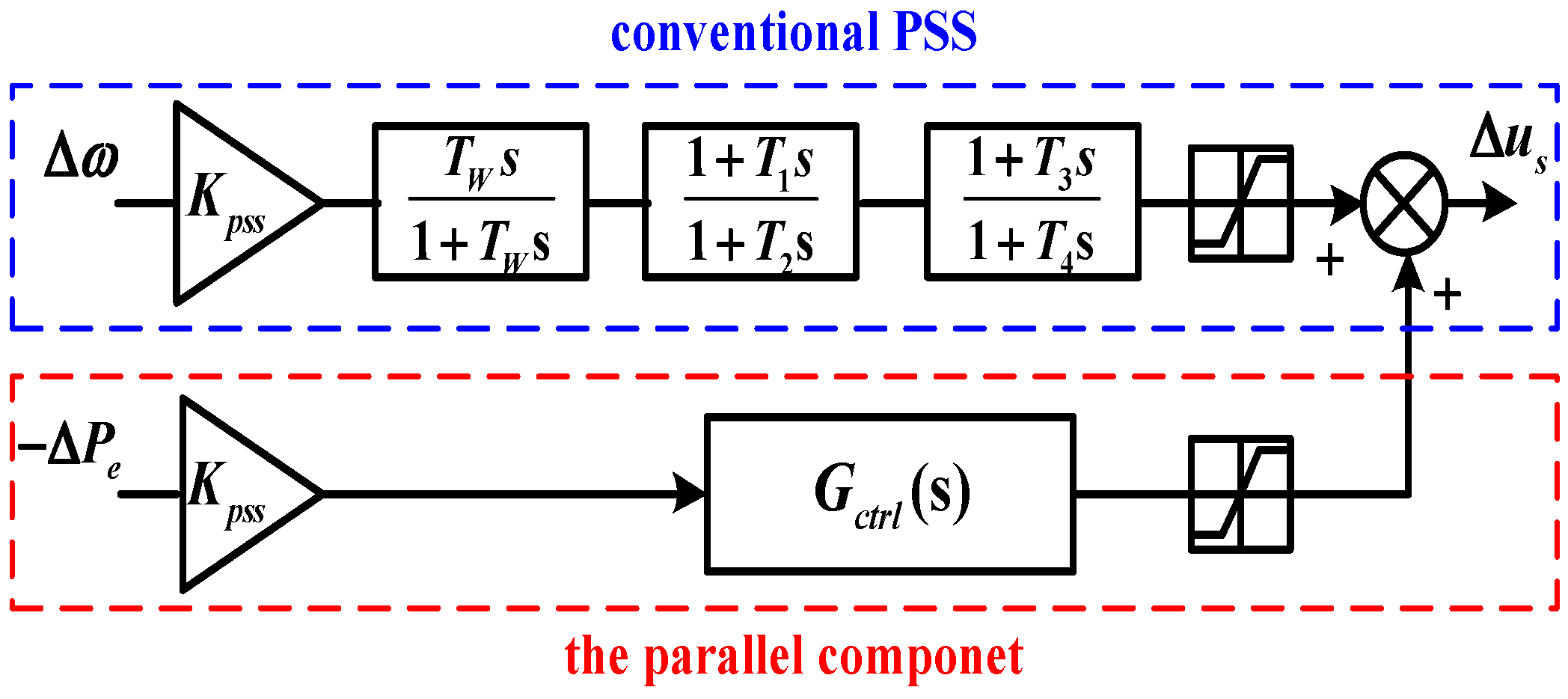
Figure 5.
Bode diagram of exciter-PSS loop under 3–30 Hz with different Kc.

Figure 6.
Diagram of the Ximeng coal power station of China.
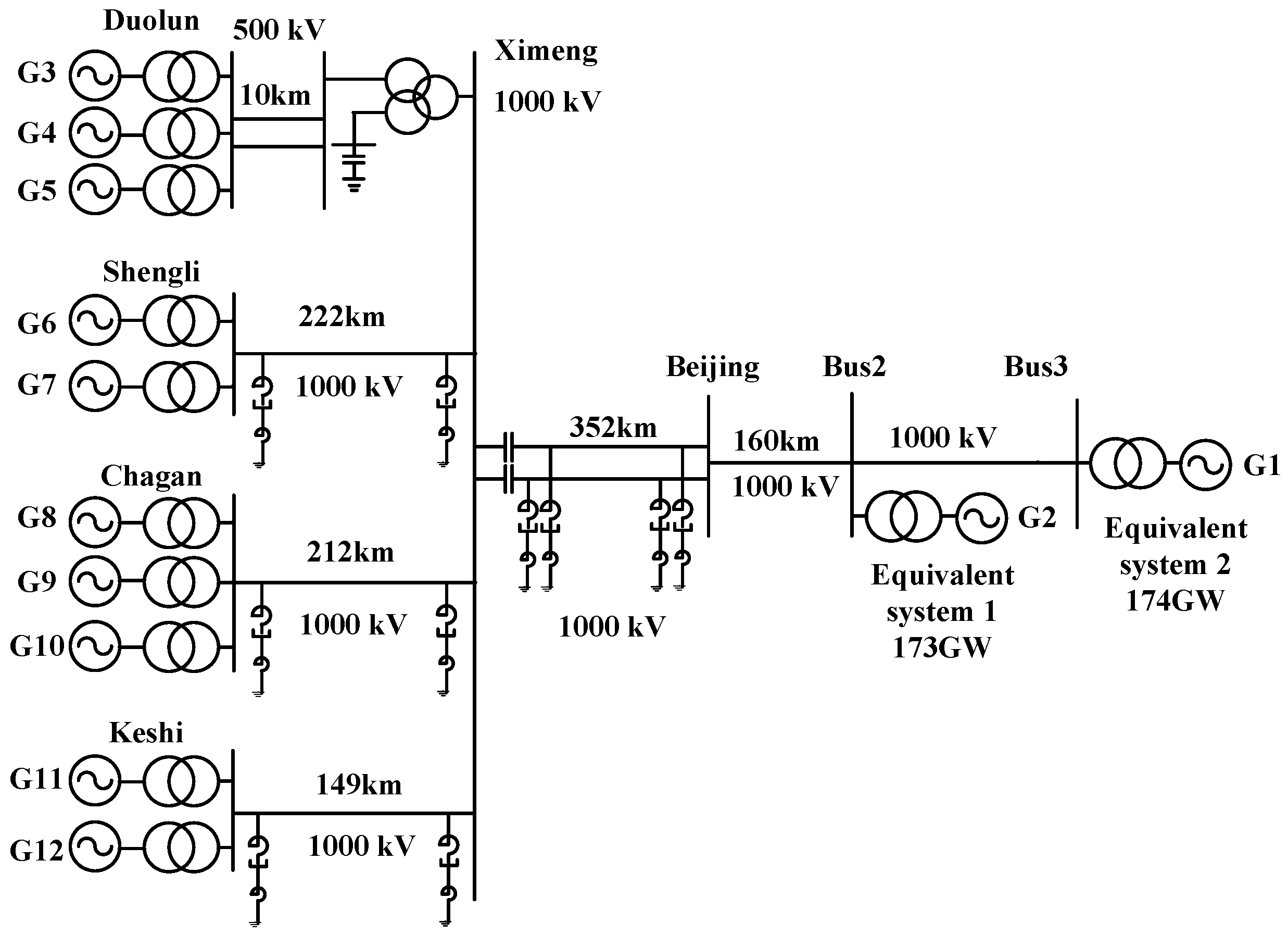
Figure 7.
Ideal compensation phases of generator and PSS with certain parameter.
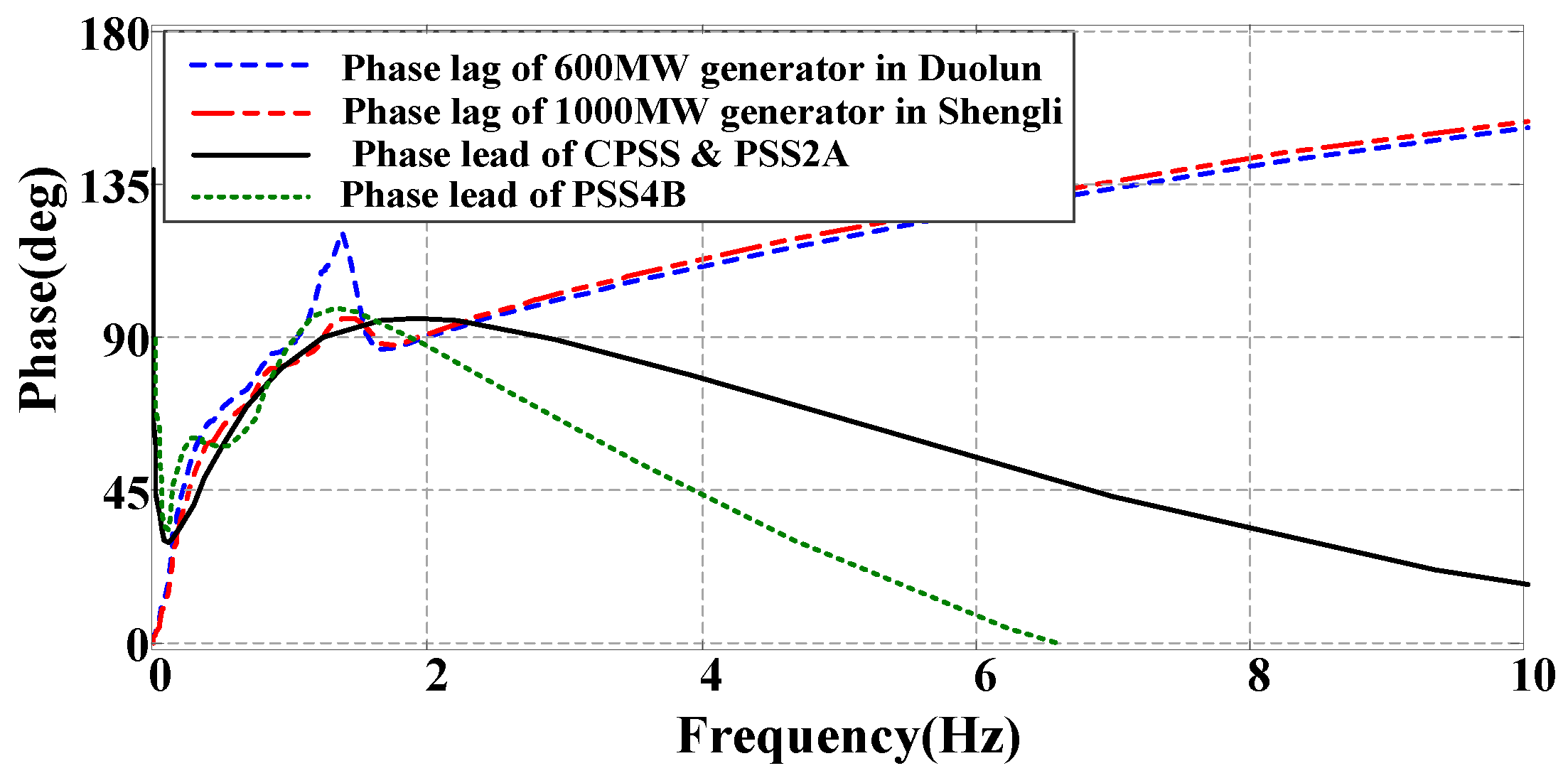
Figure 8.
Comparison of bode diagram between the system using CPSS and NPSS at Kpss = 10.
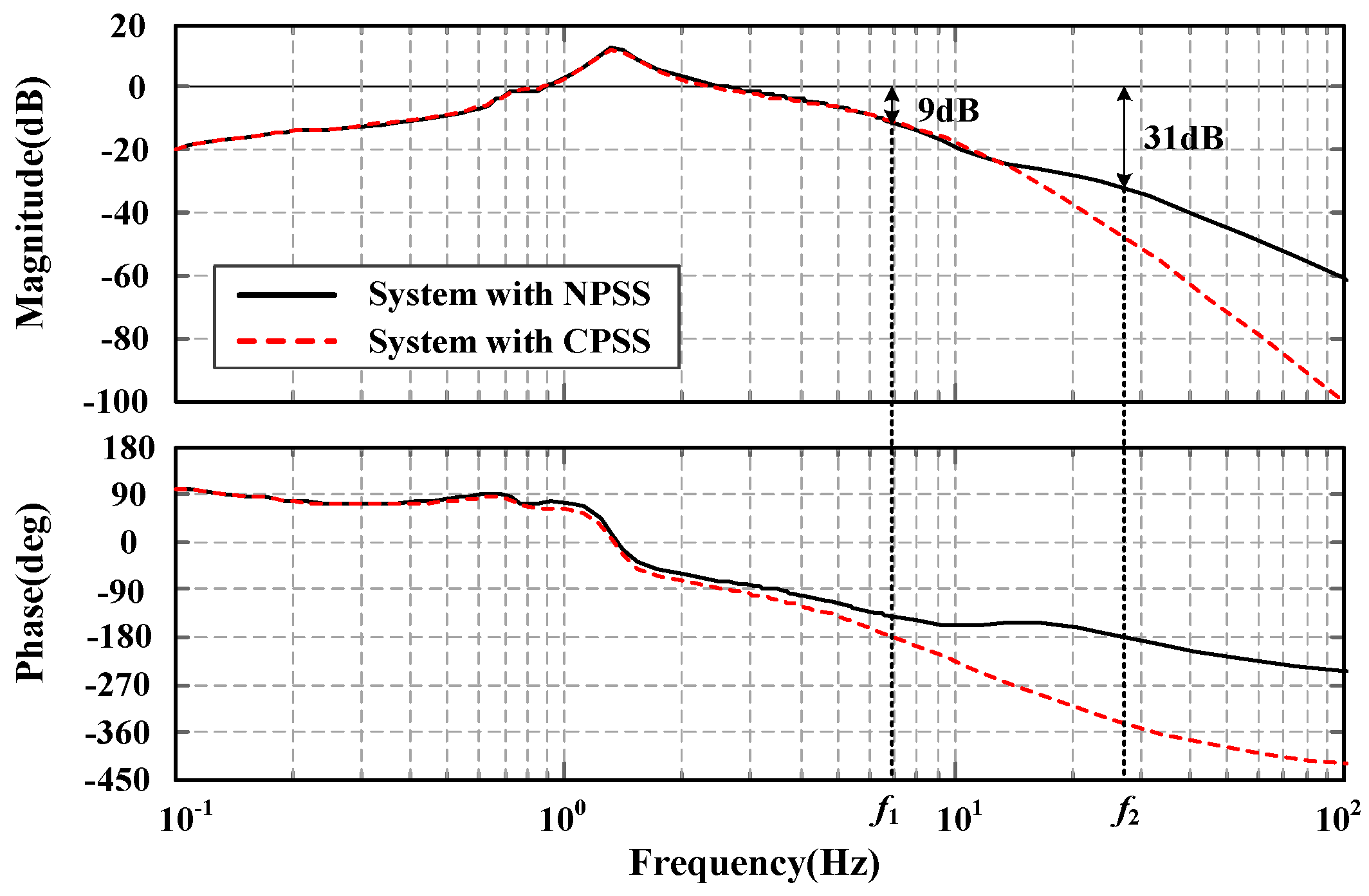
Figure 9.
Active power of G3 during an N-1 fault on one 1000 kV transmission line from Ximieng to Beijing using CPSS, PSS2A and PSS2B.
Figure 9.
Active power of G3 during an N-1 fault on one 1000 kV transmission line from Ximieng to Beijing using CPSS, PSS2A and PSS2B.

Figure 10.
System response during an N-1 fault on one 1000 kV transmission line from Ximieng to Beijing using CPSS. (a) Active power of generators in each power plant; and (b) active power of the rest 1000 kV transmission line between Ximeng and Beijing.
Figure 10.
System response during an N-1 fault on one 1000 kV transmission line from Ximieng to Beijing using CPSS. (a) Active power of generators in each power plant; and (b) active power of the rest 1000 kV transmission line between Ximeng and Beijing.

Figure 11.
System response to +0.01 p.u. voltage reference step on G3 (both CPSS and NPSS with 3 times of its setting gain).
Figure 11.
System response to +0.01 p.u. voltage reference step on G3 (both CPSS and NPSS with 3 times of its setting gain).
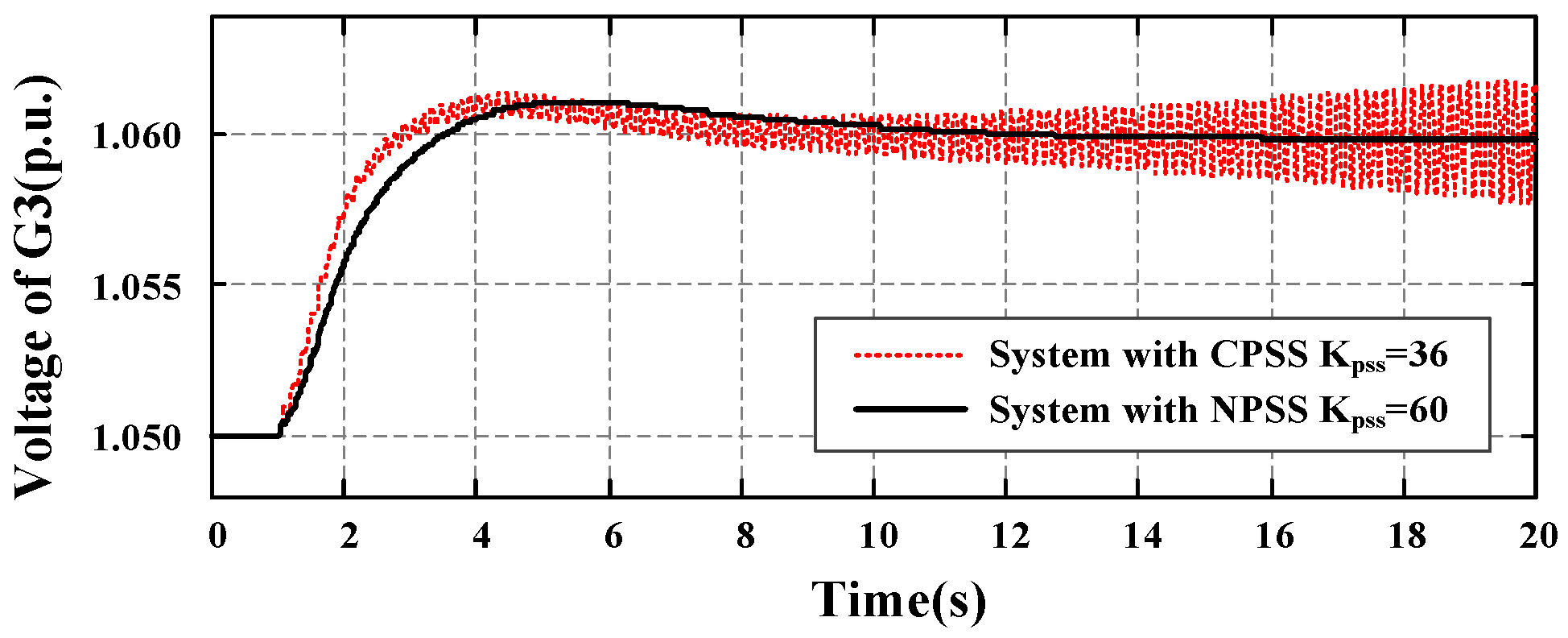
Figure 12.
System response during an N-1 fault on one 1000 kV transmission line from Ximieng to Beijing using NPSS. (a) Active power of generators in each power plant; and (b) active power of the rest 1000 kV transmission line between Ximeng and Beijing.
Figure 12.
System response during an N-1 fault on one 1000 kV transmission line from Ximieng to Beijing using NPSS. (a) Active power of generators in each power plant; and (b) active power of the rest 1000 kV transmission line between Ximeng and Beijing.

Table 1.
Inter-area oscillation mode of the system using CPSSs.
| PSS Type | Conditions | Frequency (Hz) | Damping Ratio |
|---|---|---|---|
| CPSS | Double lines | 0.726 | 0.121 |
| Single line | 0.584 | 0.023 | |
| PSS2A | Double lines | 0.642 | 0.122 |
| Single line | 0.539 | 0.032 | |
| PSS4B | Double lines | 0.763 | 0.097 |
| Single line | 0.596 | 0.041 |
Table 2.
Inter-area oscillation mode of the system using CPSS at Kpss = 12.
| Conditions | Frequency (Hz) | Damping Ratio |
|---|---|---|
| Double lines | 0.706 | 0.156 |
| Single line | 0.569 | 0.053 |
Table 3.
Unstable exciter modes of the system using CPSS at Kpss = 36.
| Corresponding State Variables | Frequency (Hz) | Damping Ratio |
|---|---|---|
| Exciter and PSS | 7.130 | −0.0179 |
| 7.090 | −0.0331 | |
| 7.025 | −0.0331 | |
| 7.130 | −0.0390 |
Table 4.
Comparison of dominate oscillation modes of the system using CPSS and NPSS.
| PSS Type | Kpss | Mode Type | Frequency (Hz) | Damping Ratio |
|---|---|---|---|---|
| CPSS | 10 | inter-area | 0.726 | 0.121 |
| exciter | 5.530 | 0.358 | ||
| 30 | inter-area | 0.545 | 0.405 | |
| exciter | 6.930 | −0.007 | ||
| NPSS | 10 | inter-area | 0.714 | 0.093 |
| exciter | 16.30 | 0.771 | ||
| 30 | inter-area | 0.553 | 0.344 | |
| exciter | 17.50 | 0.633 | ||
| 350 | exciter | 27.30 | −0.003 |
Table 5.
Small signal stability of the system using NPSS at Kpss = 20.
| Conditions | Frequency (Hz) | Damping Ratio | Kmax | Times to Exceed Kmax |
|---|---|---|---|---|
| Double lines | 0.627 | 0.223 | 350 | 17.5 |
| Single line | 0.518 | 0.151 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, Z.; Yao, W.; Wen, J. Enhancement of Power System Stability Using a Novel Power System Stabilizer with Large Critical Gain. Energies 2017, 10, 449. https://doi.org/10.3390/en10040449
AMA Style
Liu Z, Yao W, Wen J. Enhancement of Power System Stability Using a Novel Power System Stabilizer with Large Critical Gain. Energies. 2017; 10(4):449. https://doi.org/10.3390/en10040449
Chicago/Turabian StyleLiu, Ziquan, Wei Yao, and Jinyu Wen. 2017. "Enhancement of Power System Stability Using a Novel Power System Stabilizer with Large Critical Gain" Energies 10, no. 4: 449. https://doi.org/10.3390/en10040449
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.