An Adaptive Model Predictive Load Frequency Control Method for Multi-Area Interconnected Power Systems with Photovoltaic Generations

Abstract
:1. Introduction
- (1)
- To the best of the authors’ knowledge, an extended MPC method with an extended state vector is proposed firstly for the optimal LFC issue of a multi-area interconnected power system with PV generation.
- (2)
- Compared with two state-of-the-art control methods reported in [32], this proposed MPC method considers some nonlinear features such as DB and GRC in a thermal system.
- (3)
2. System Model
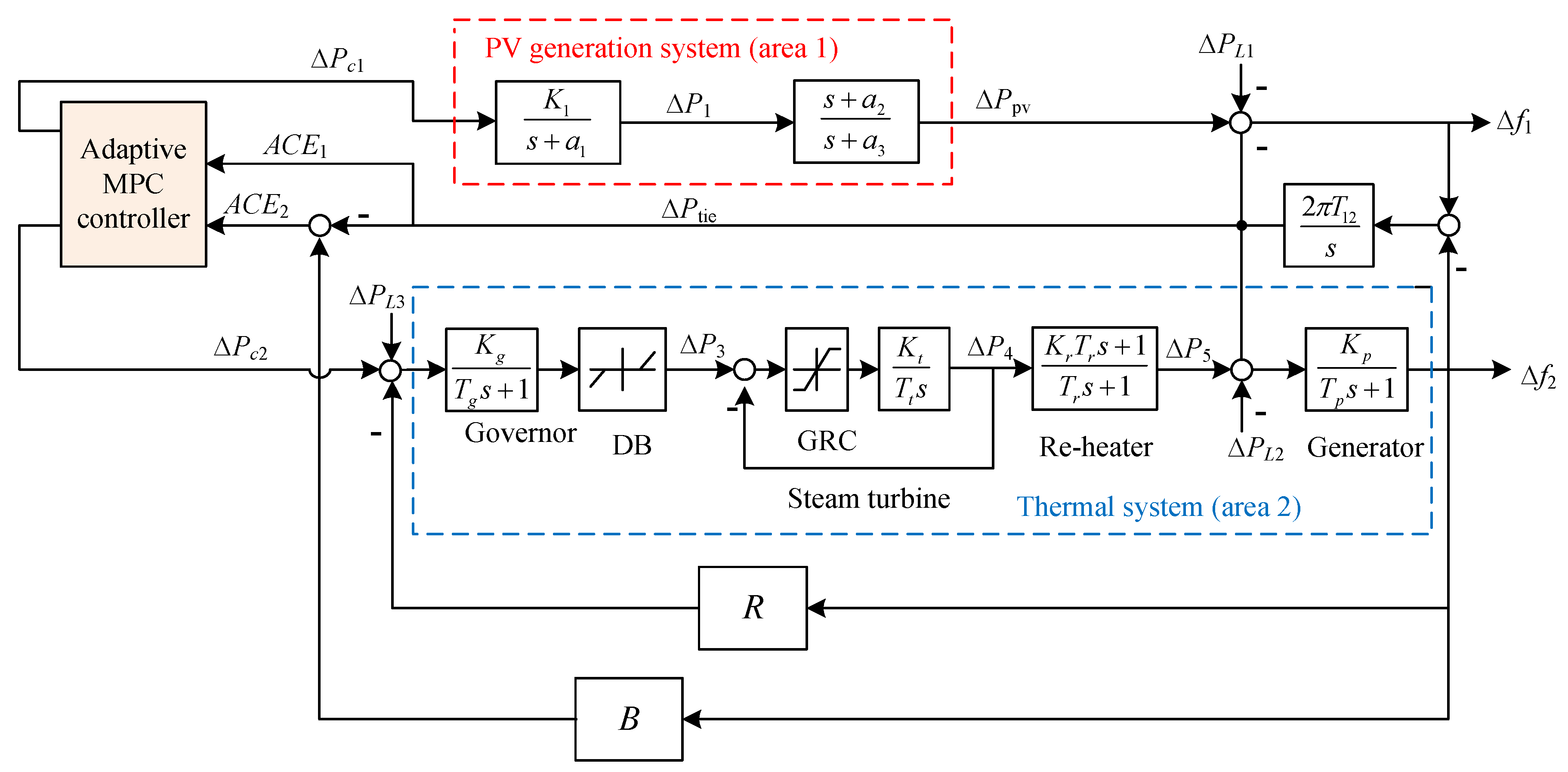
2.1. Small-Signal Model
2.2. State-Space Model
3. The Proposed Method
- Step 1:
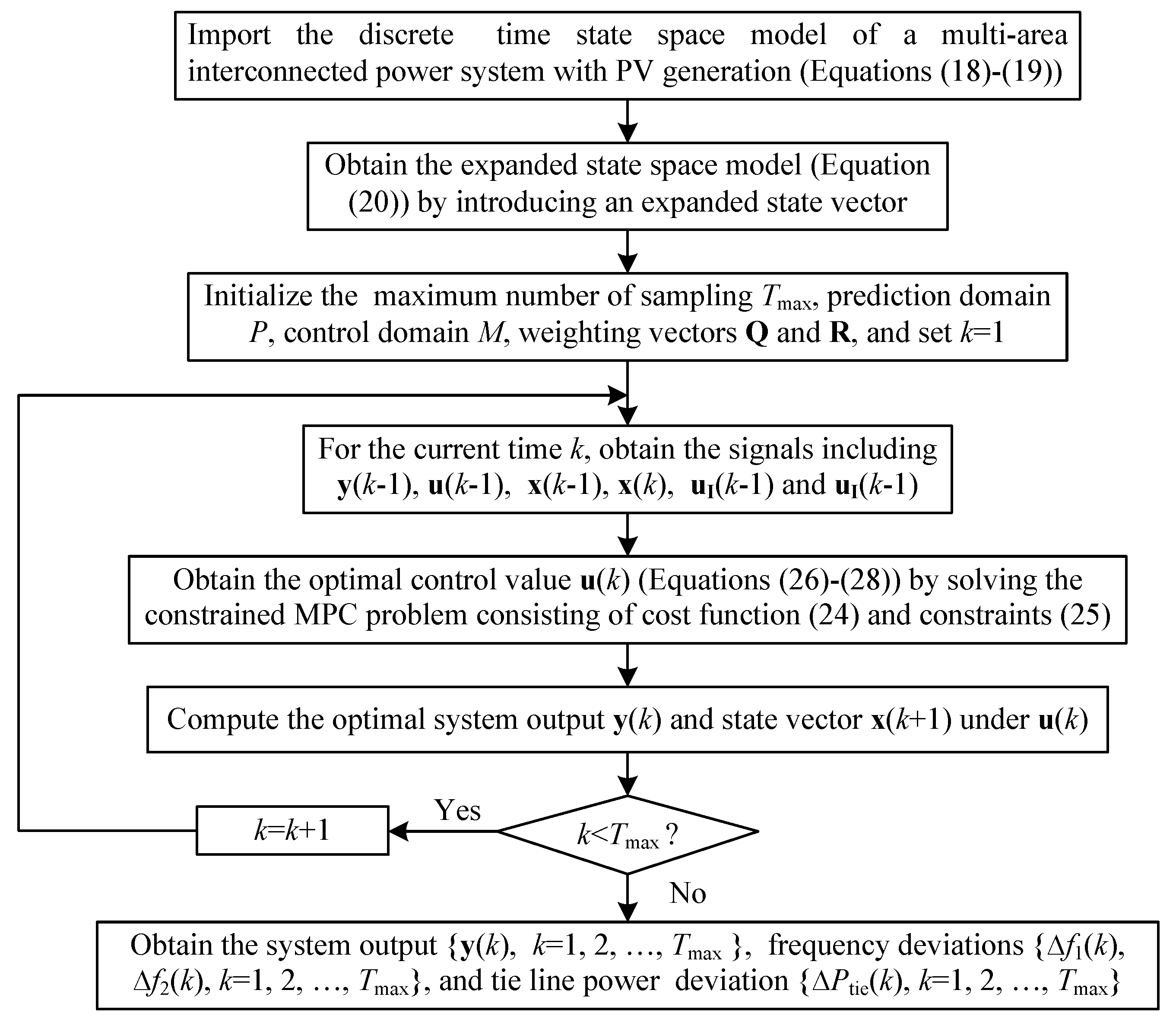
- Import the discrete time state space model of a multi-area interconnected power system with PV generation described as Equations (18) and (19).
- Step 2:
- Obtain the expanded state space model described as Equation (20) by introducing an expanded state vector.
- Step 3:
- Initialize the parameters of predictive control model including maximum number of sampling Tmax, prediction domain P, control domain M, weighting vectors Q and R, and set k=1;
- Step 4:
- For the current time k, obtain the past values of the output vector y(k − 1) = [ACE1(k − 1), ACE2(k − 1)]T, control vector u(k − 1) = [ΔPc1(k − 1), ΔPc2(k − 1)]T, state vector x(k − 1) = [ΔP1(k − 1), ΔPpv(k − 1), ΔPtie(k − 1), Δf2(k − 1), ΔP3(k − 1), ΔP4(k − 1), ΔP5(k − 1)]T, and disturbance vector uI(k − 1) = [ΔPL1(k − 1), ΔPL2(k − 1), ΔPL3(k − 1)]T.
- Step 5:
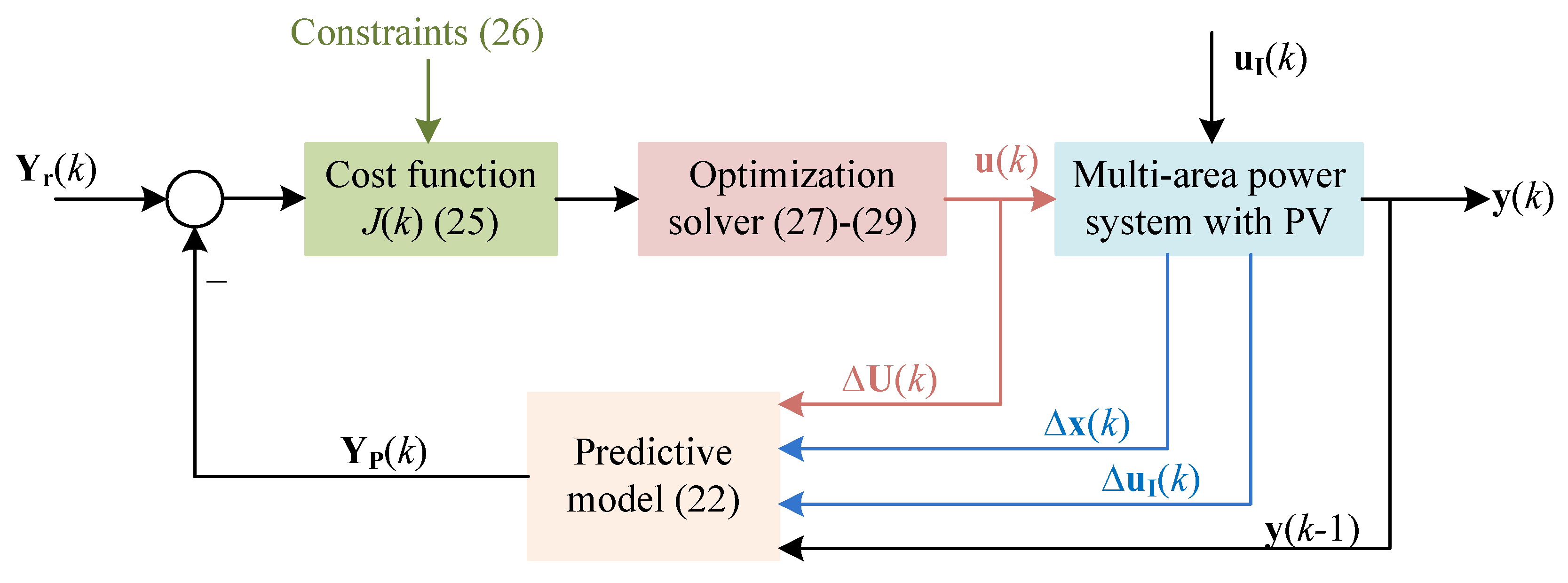
- Obtain the predictive vector YP(k) by Equation (22) and the rolling optimization model consisting of cost function (25) and constraints (26).
- Step 6:
- Obtain the optimal control vector u(k) according to Equations (27)–(29) by gradient descent method.
- Step 7:
- Compute the optimal system output y(k) and state vector x(k) under u(k).
- Step 8:
- Set k = k + 1, and return step 4 until k = Tmax.
- Step 9:
- Obtain the system output {y(k), k=1, 2, …, Tmax}, frequency deviation {Δf1(k), Δf2(k), k=1, 2, …, Tmax}, and tie line power{ΔPtie(k), k=1, 2, …, Tmax} of a multi-area interconnected power system with PV generation.
4. Simulation Results
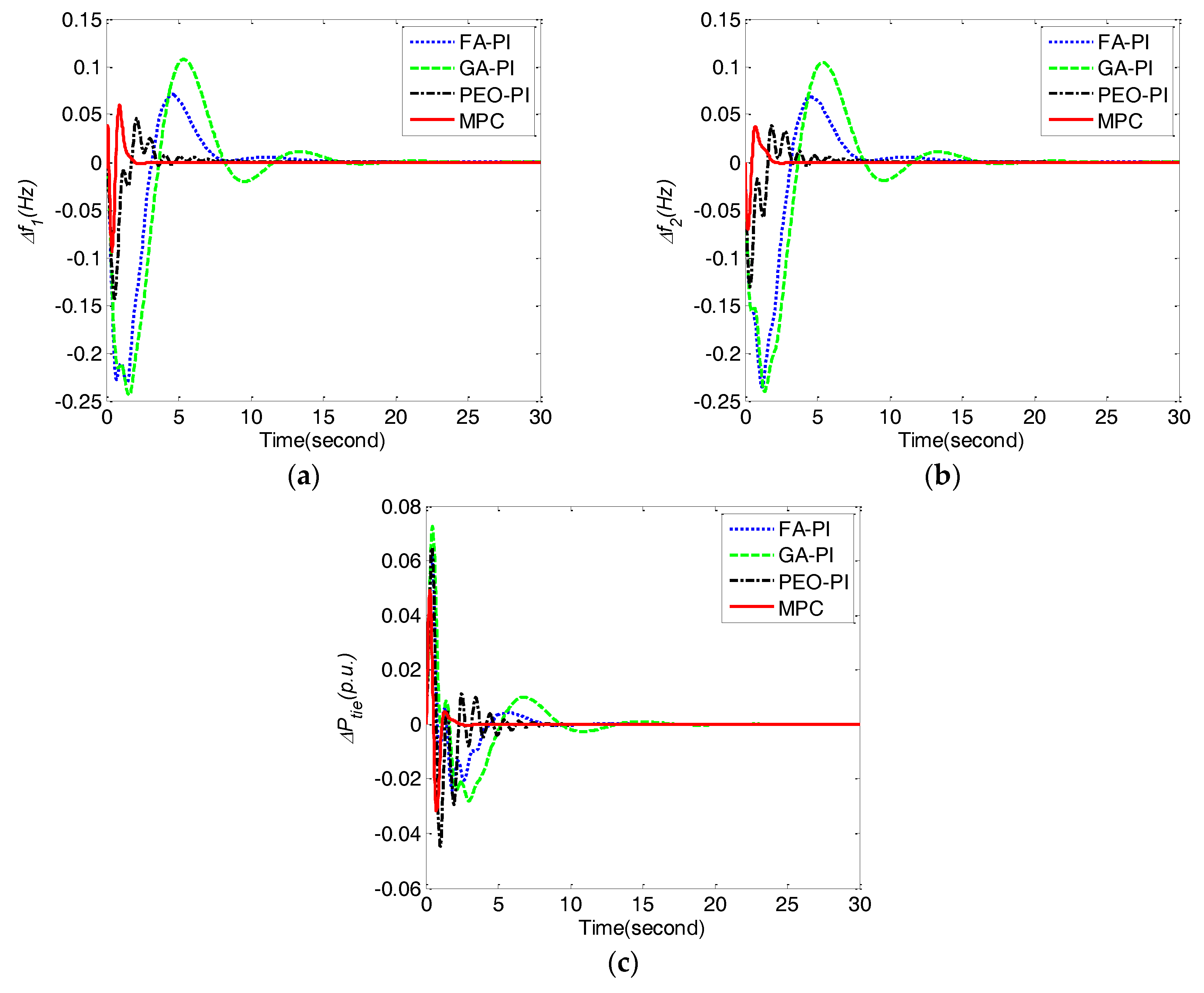
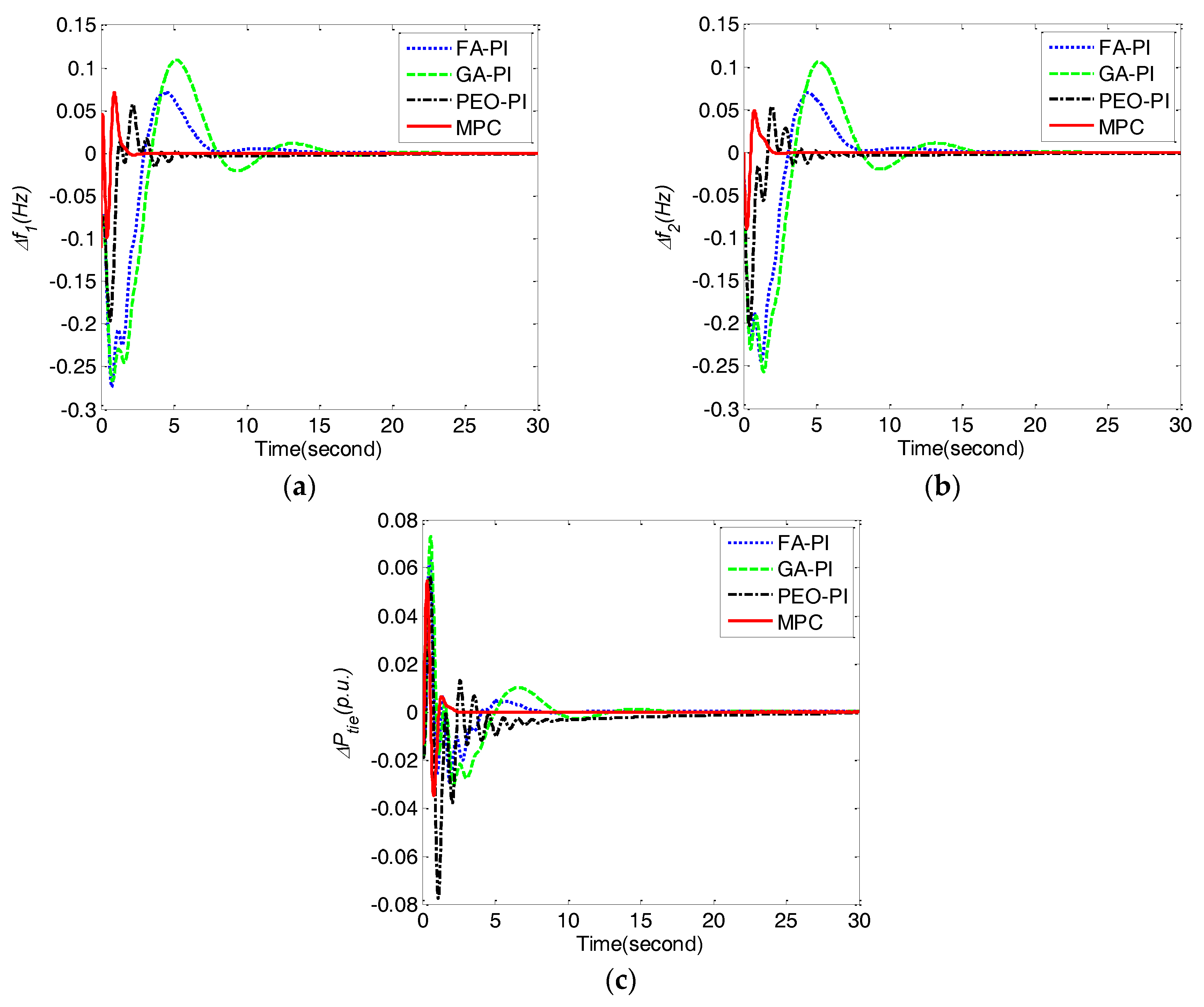
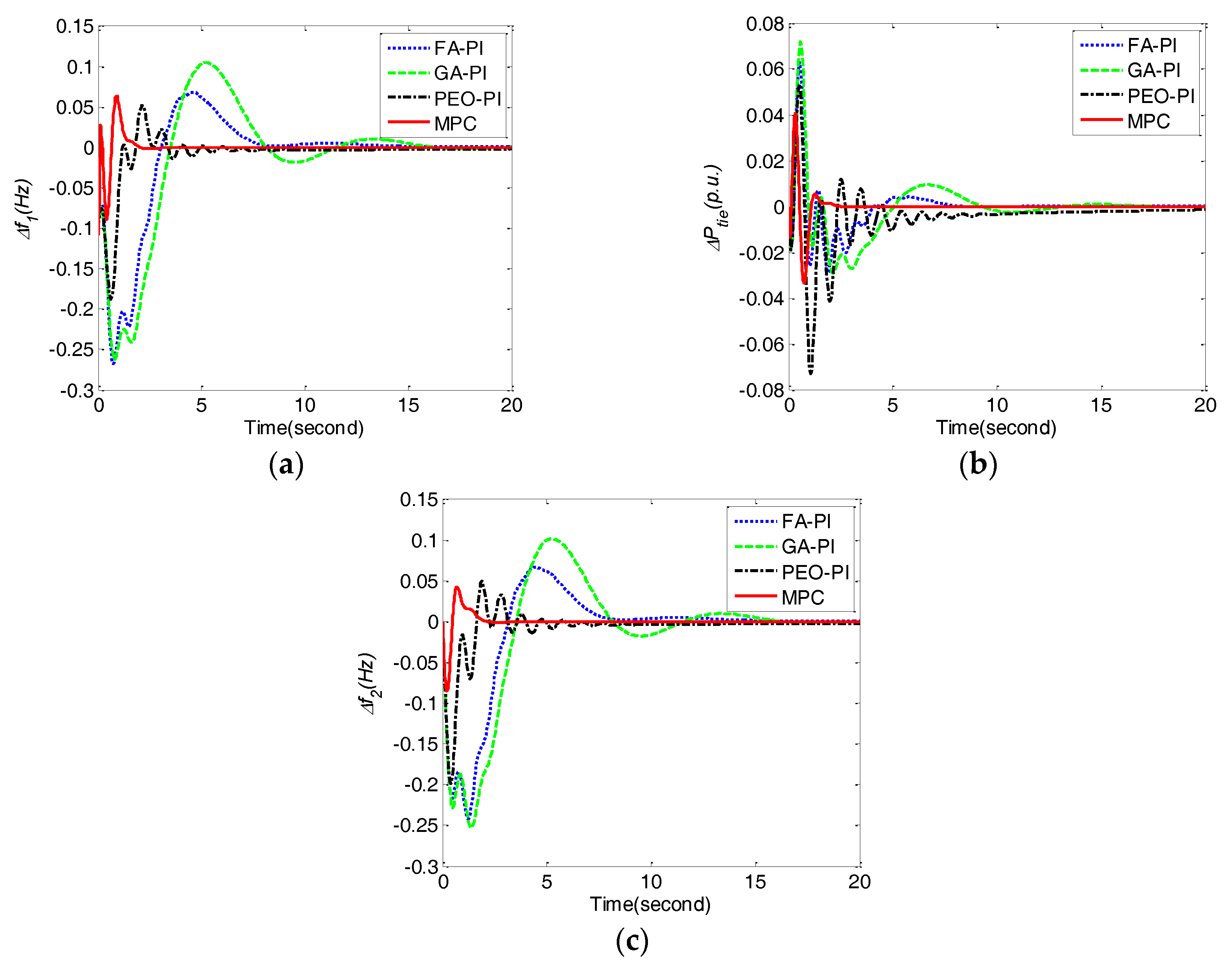
4.1. Case 1: Step Increase in Demand of Thermal System
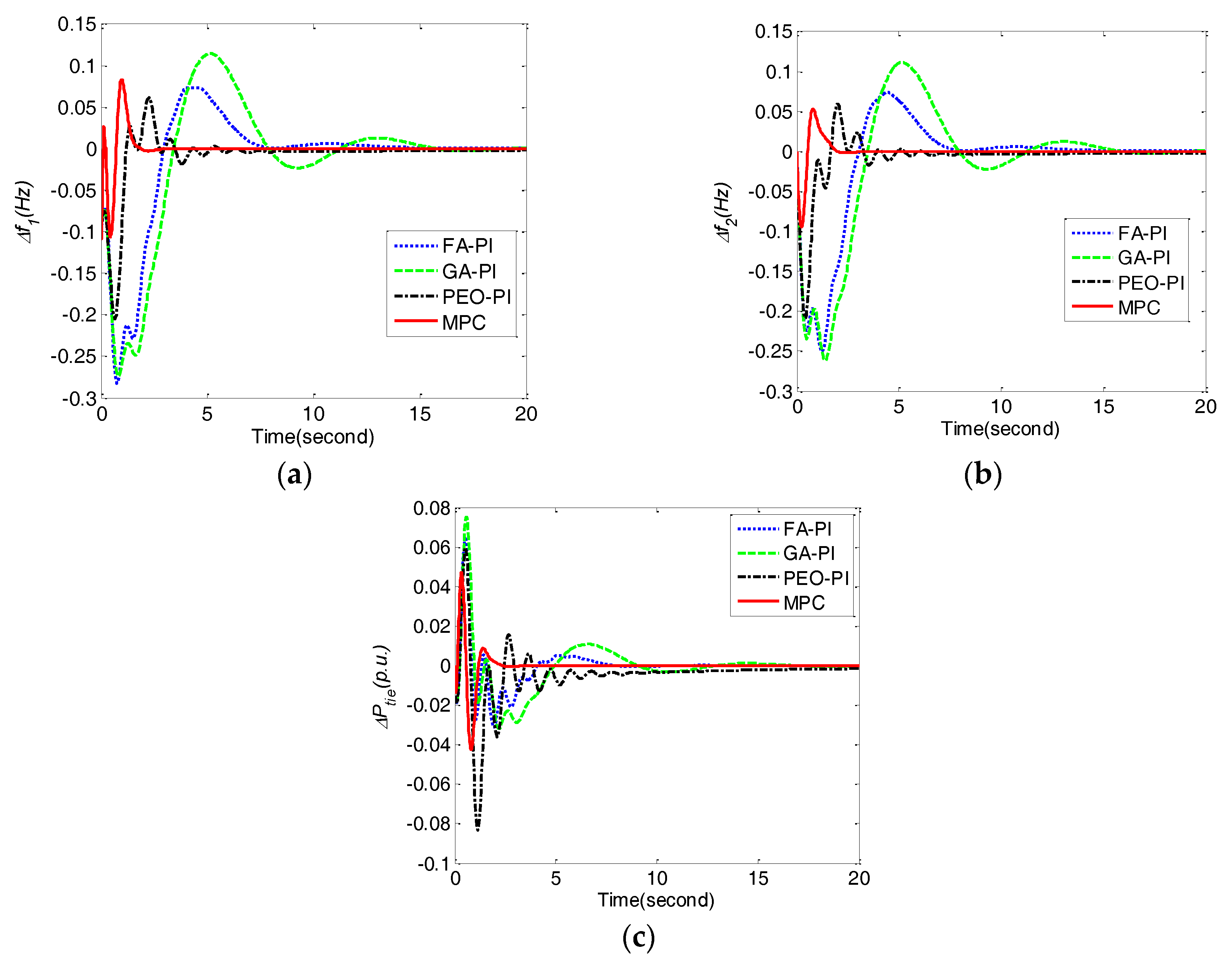
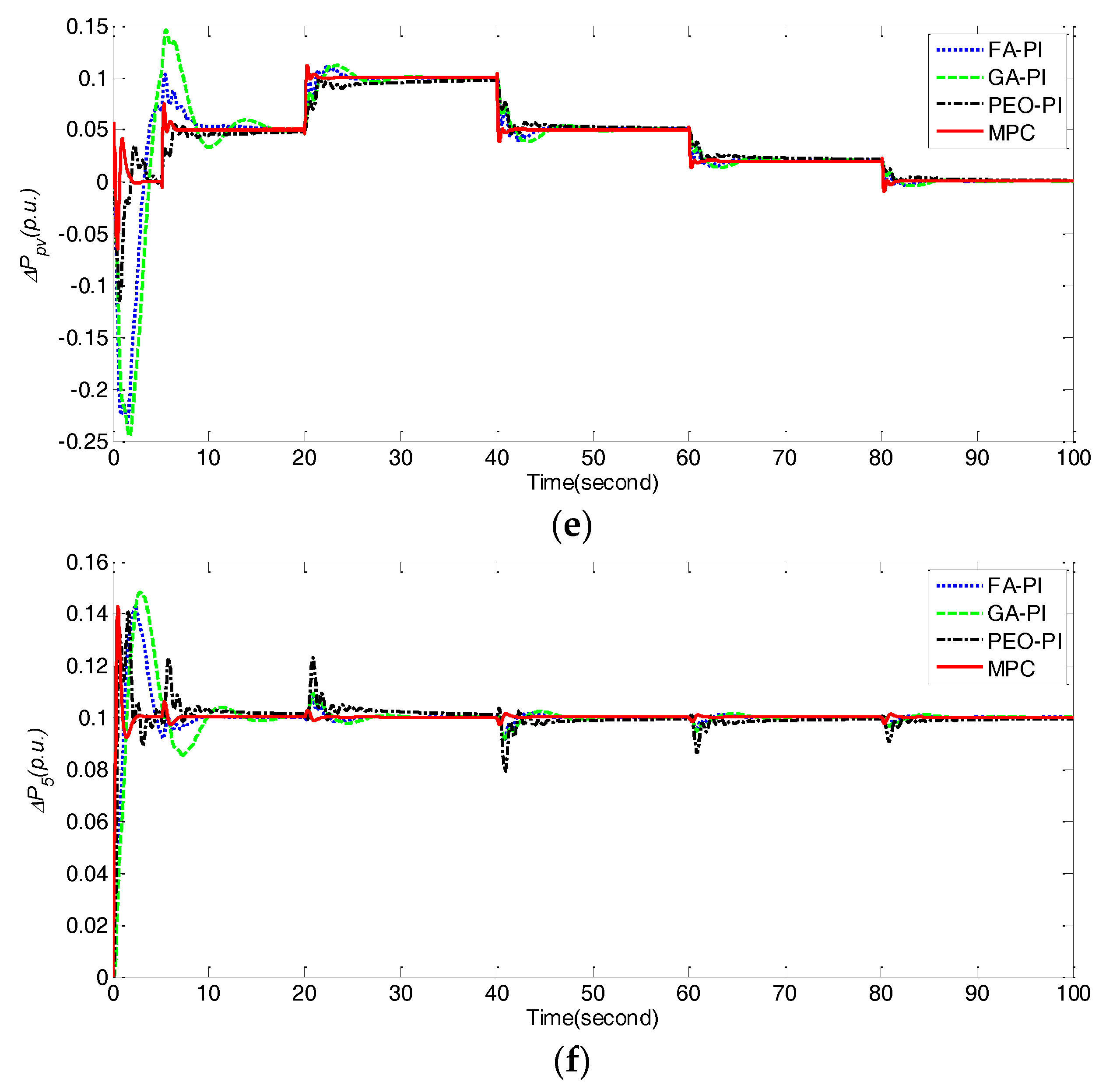
4.2. Case 2: Step Increase in Demand of Thermal System and PVGeneration
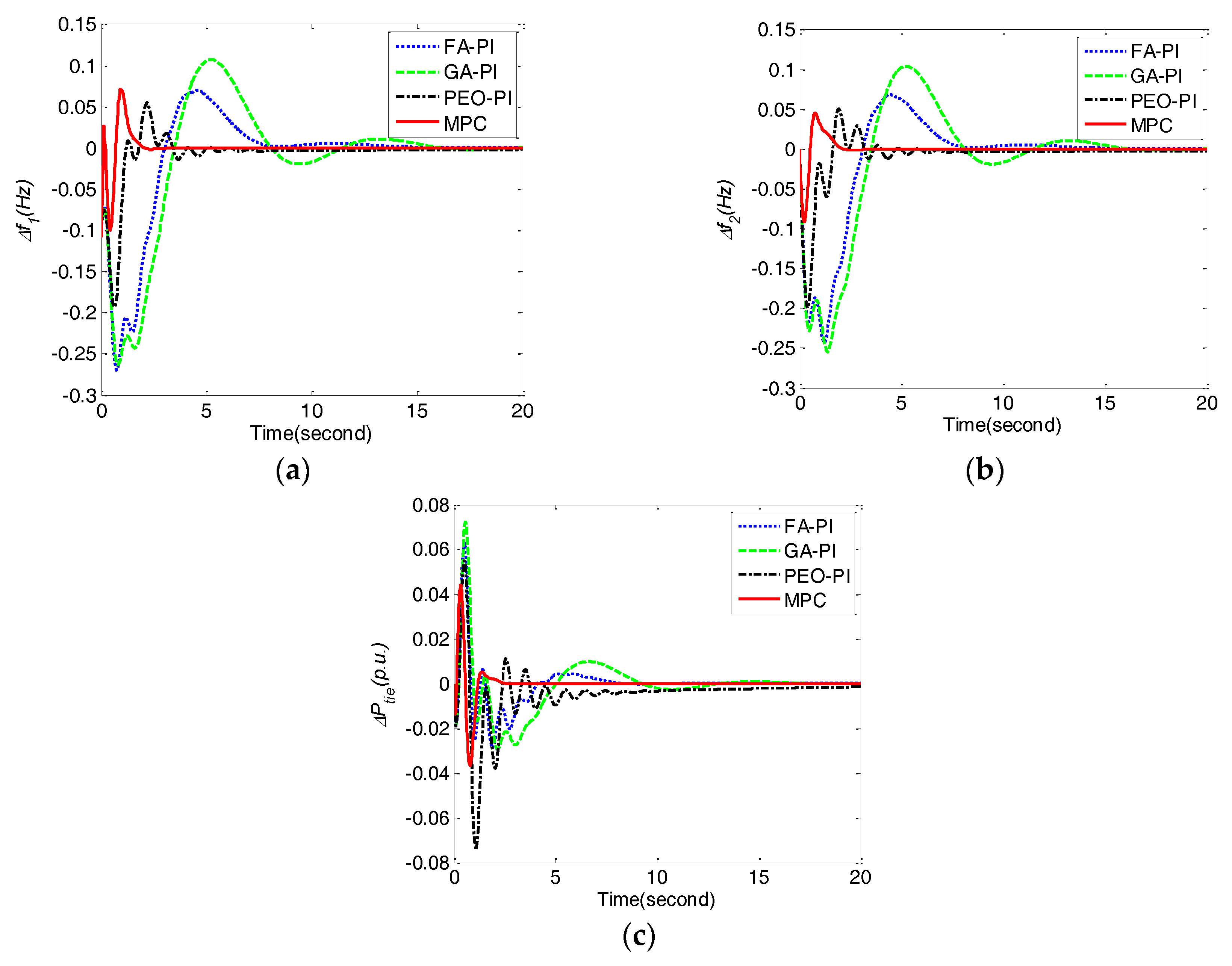
4.3. Case 3: Robustness Test for Perturbed Parameter Tg
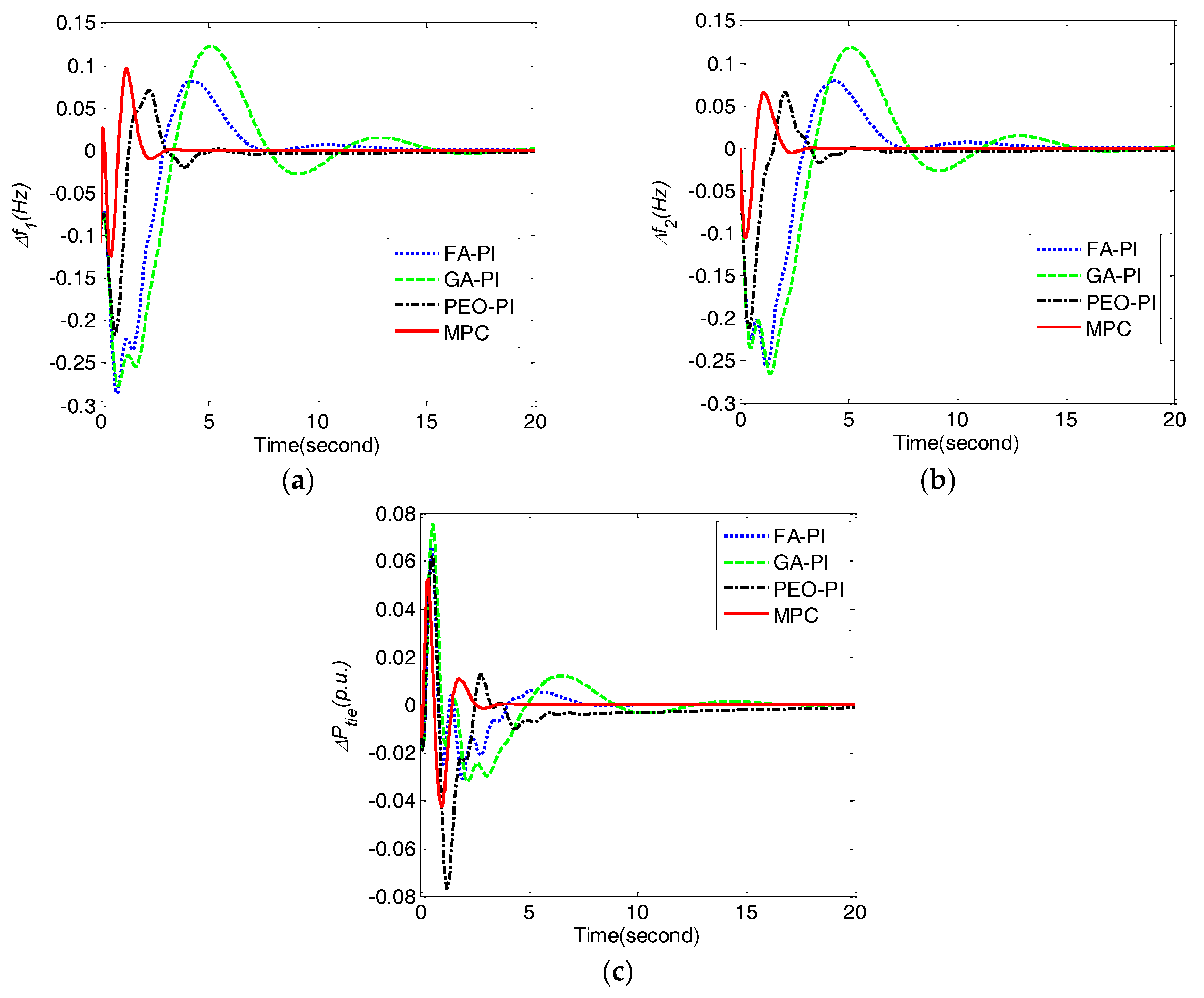
4.4. Case 4: Robustness Test for Perturbed Parameter Tt
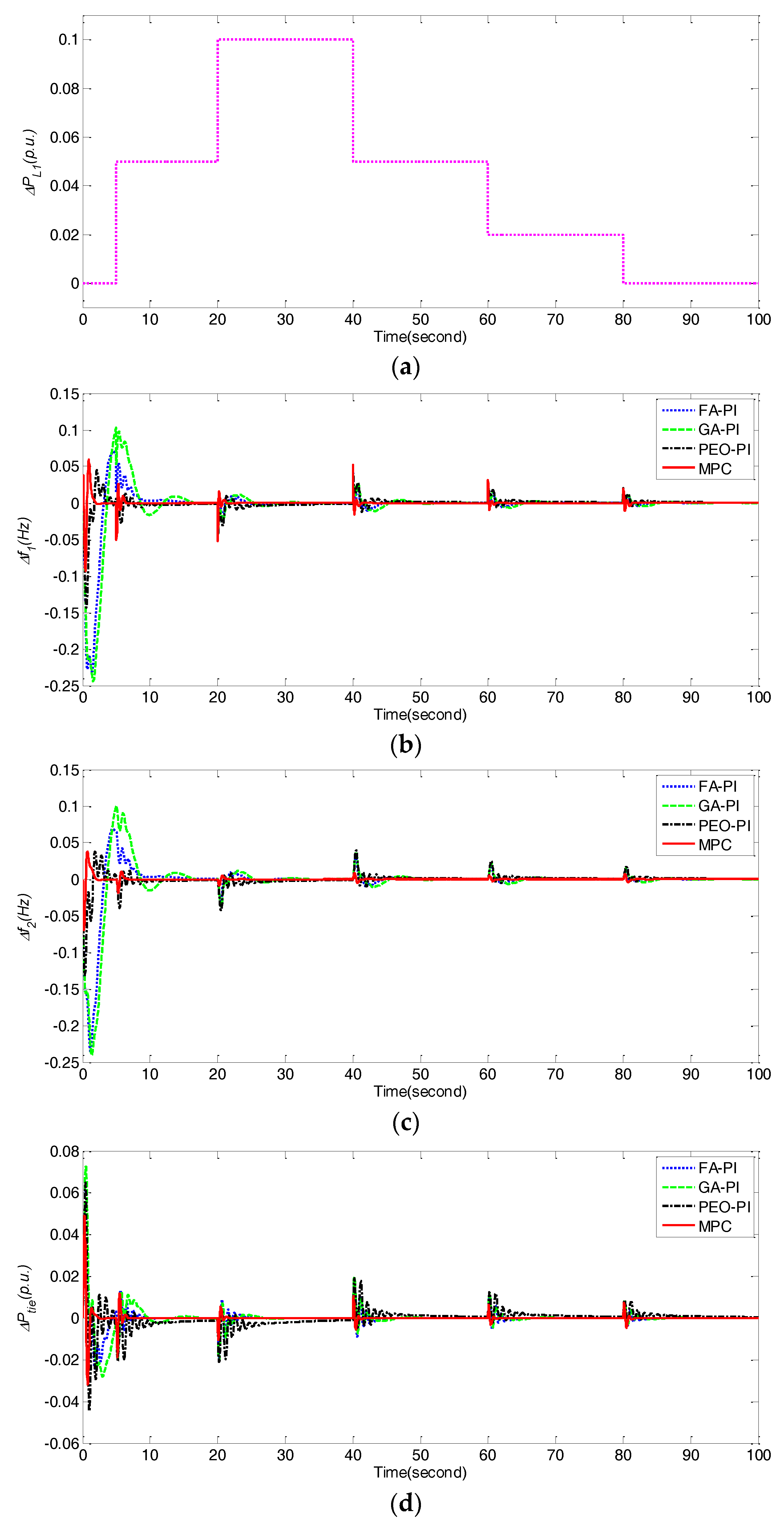
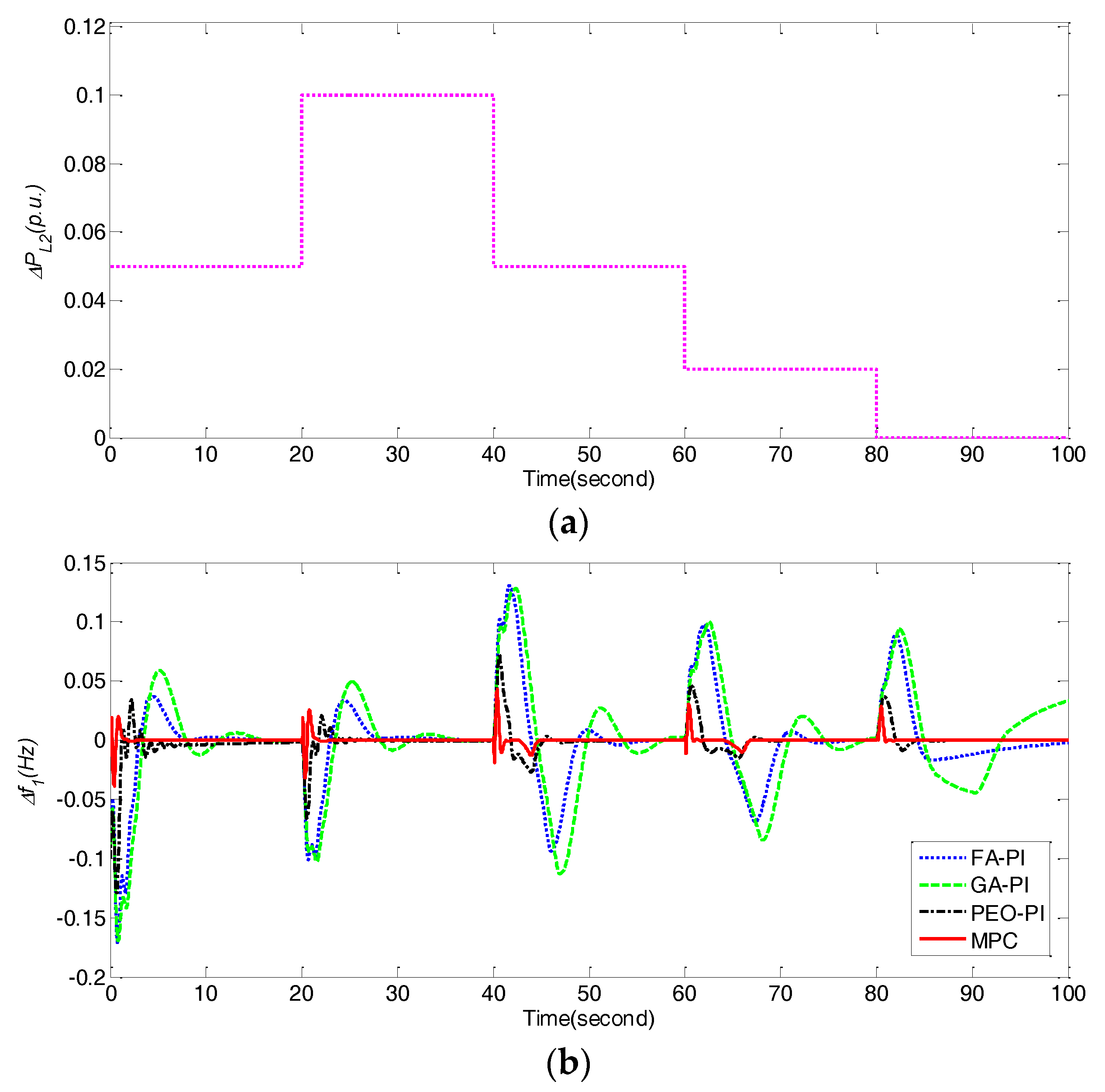
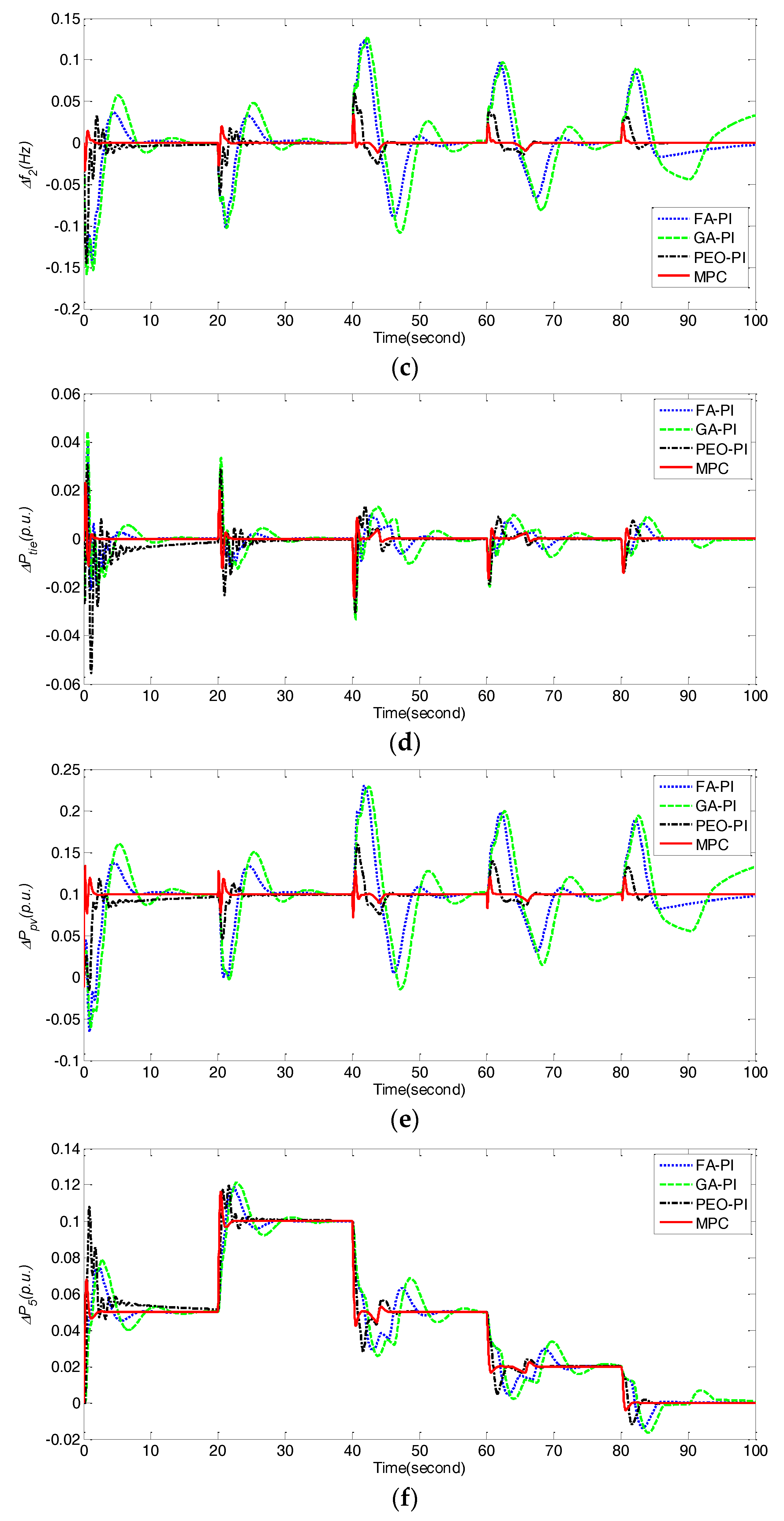
4.5. Robustness Test for Dynamical Load Fluctuations
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Δfi | Frequency deviation of area i |
| ΔP1 | The intermediate power deviation of PV |
| ΔP3 | Power deviation of governor |
| ΔP4 | Power deviation of steam turbine |
| ΔP5 | Power deviation of and re-heater |
| ΔPci | Control signal of area i |
| ΔPLi | Load changes |
| ΔPpv | Power deviation of PV |
| ΔPtie | Power deviation of tie-lines |
| a1(a3) | Negative values of poles |
| a2 | Negative value of zeros |
| tr1 (tr2) | Rising time of Δf1 (Δf2) |
| tr3 | Rising time of ΔPtie |
| ts1 (ts2) | Settling time of Δf1 (Δf2) |
| ts3 | Settling time of ΔPtie |
| ACEi | Area control error of area i |
| B | Frequency bias factor |
| Ess1 (Ess2) | Steady-state error of Δf1 (Δf2) |
| Ess3 | Steady-state error of ΔPtie |
| Gge(s) (Ggo(s)) | Transfer function of generator (governor) |
| Gpv(s) | Transfer function of PV generation |
| Gr(s) | Transfer function of re-heater |
| Gt(s) | Transfer function of steam turbine |
| IAE | Integral of absolute error |
| ISE | Integral of square error |
| ITAE | Integral of time multiplied absolute error |
| ITSE | Integral of time multiplied square error |
| J(k) | Cost function of predictive model |
| K1 | Gain of PV generation system |
| Kg | Gain of governor |
| Kp | Gain of generator |
| Kr | The p.u. megawatt rating of high pressure stage |
| Kt | Gain of governor |
| KI1 (KI2) | Integral parameter of PI controller in area 1 (area 2) |
| KP1 (KP2) | Proportional parameter of PI controller in area 1 (area 2) |
| M | Control horizon |
| Mp1 (Mp2) | Overshoot of Δf1 (Δf2) |
| Mp3 | Overshoot of ΔPtie |
| Nu | Number of variables in control vector |
| NuI | Number of variables in disturbance vector |
| Nx | Number of variables in state vector |
| Ny | Number of variables in system output vector |
| P | Prediction horizon |
| R | Regulation constant |
| Tg | Inertial time constant of governor |
| Tmax | Maximum number of sampling times |
| Tp | Inertial time constant of generator |
| Tr | Time constant of re-heater |
| Ts | Sampling time |
| Tt | Inertial time constant of steam turbine |
| T12 | Synchronizing coefficient of tie-line |
| c(k) | The set-point vector of system output |
| u | Control vector |
| umin(umax) | Lower (upper) limits of control vector |
| uI | Disturbance vector |
| x | State vector |
| y | System output vector |
| ymin(ymax) | Lower (upper) limits of y |
| y(k+p|k) | The (k+p)-th predictive output at k-th time |
| yr(k+p|k) | The (k+p)-th predictive reference |
| Δu | Incremental form of control vector |
| ΔuI | Incremental form of disturbance vector |
| Δumin(Δumax) | Lower (upper) limits of Δu |
| Δx | Incremental state vector |
| Δy | Incremental form of system output vector |
| ΔU | Predictive control vector |
| ΔUI | Predictive disturbance vector |
| A | Continuous-time system matrix |
| Ad | Discrete-time system matrix |
| B | Continuous-time control matrix |
| Bd | Continuous-time control matrix |
| BI | Continuous-time disturbance matrix |
| BId | Discrete-time disturbance matrix |
| C | System output matrix |
| Cz | Extended system output matrix |
| E | Identity matrix |
| G | Extended discrete-time system matrix |
| H | Extended discrete-time control matrix |
| HI | Extended discrete-time disturbance matrix |
| Q | Weighting vector of square predicted errors |
| R | Weighting vector of square future control |
| YP(k) | Predictive output vector |
| Yr(k) | Reference predictive vector |
| Z(k) | Extend state vector |
| λ | Soften factor |
| Predictive system matrix | |
| Predictive control matrix | |
| Predictive disturbance matrix |
References
- Pandey, S.K.; Mohanty, S.R.; Kishor, N. A literature survey on load-frequency control for conventional and distribution generation power systems. Renew. Sustain. Energy Rev. 2013, 25, 318–334. [Google Scholar] [CrossRef]
- Wu, Y.; Wei, Z.; Weng, J.; Li, X.; Deng, R.H. Resonance attacks on load frequency control of smart grids. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Tan, W. Unified tuning of PID load frequency controller for power systems via IMC. IEEE Trans. Power Syst. 2010, 25, 341–350. [Google Scholar] [CrossRef]
- Saxena, S.; Hote, Y.V. Decentralized PID load frequency control for perturbed multi-area power systems. Int. J. Electr. Power Energy Syst. 2016, 81, 405–415. [Google Scholar] [CrossRef]
- Golpira, H.; Bevrani, H. Application of GA optimization for automatic generation control design in an interconnected power system. Energy Convers. Manag. 2011, 52, 2247–2255. [Google Scholar] [CrossRef]
- Daneshfar, F.; Bevrani, H. Multiobjective design of load frequency control using genetic algorithms. Int. J. Electr. Power Energy Syst. 2012, 42, 257–263. [Google Scholar] [CrossRef]
- Naidu, K.; Mokhlis, H.; Bakar, A.H.A. Multiobjective optimization using weighted sum artificial bee colony algorithm for load frequency control. Int. J. Electr. Power Energy Syst. 2014, 55, 657–667. [Google Scholar] [CrossRef]
- Panda, S.; Yegireddy, N.K. Automatic generation control of multi-area power system using multi-objective non-dominated sorting genetic algorithm-II. Int. J. Electr. Power Energy Syst. 2013, 53, 54–63. [Google Scholar] [CrossRef]
- Chuang, N. Robust H∞ load-frequency control in interconnected power systems. IET Control Theory Appl. 2016, 10, 67–75. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Lars, I.; Kjetil, U. Model predictive load-frequency control. IEEE Trans. Power Syst. 2016, 31, 777–785. [Google Scholar] [CrossRef]
- Ojaghi, P.; Rahmani, M. LMI-based robust predictive load frequency control for power systems with communication delays. IEEE Trans. Power Syst. 2017, 32, 4091–4100. [Google Scholar] [CrossRef]
- Liu, X.; Kong, X.; Lee, K.Y. Distributed model predictive control for load frequency control with dynamic fuzzy valve position modeling for hydro–thermal power system. IET Control Theory Appl. 2016, 10, 1653–1664. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Imsland, L.; Uhlen, K.; Fabozzi, D.; Thornhill, N.F. Model predictive load-frequency control taking into account imbalance uncertainty. Control Eng. Pract. 2016, 53, 139–150. [Google Scholar] [CrossRef]
- Ma, M.; Zhang, C.; Liu, X.; Chen, H. Distributed model predictive load frequency control of multi-area power system after deregulation. IEEE Trans. Ind. Electron. 2017, 64, 5129–5139. [Google Scholar] [CrossRef]
- Mi, Y.; Fu, Y.; Wang, C.; Wang, P. Decentralized sliding mode load frequency control for multi-area power systems. IEEE Trans. Power Syst. 2013, 28, 4301–4309. [Google Scholar] [CrossRef]
- Prasad, S.; Purwar, S.; Kishor, N. Non-linear sliding mode load frequency control in multi-area power system. Control Eng. Pract. 2017, 61, 81–92. [Google Scholar] [CrossRef]
- Sabahiand, K.; Teshnehlab, M. Recurrent fuzzy neural network by using feedback error learning approaches for LFC in interconnected power system. Energy Convers. Manag. 2009, 50, 938–946. [Google Scholar]
- Saxena, S.; Hote, Y.V. Stabilization of perturbed system via IMC: An application to load frequency control. Control Eng. Pract. 2017, 64, 61–73. [Google Scholar] [CrossRef]
- Chen, H.Y.; Ye, R.; Wang, X.D.; Lu, R.G. Cooperative control of power system load and frequency by using differential games. IEEE Trans. Control Syst. Technol. 2015, 23, 882–897. [Google Scholar] [CrossRef]
- Panda, S.; Mohanty, B.; Hota, P.K. Hybrid BFOA-PSO algorithm for automatic generation control of linear and nonlinear interconnected power systems. Appl.Soft Comput. 2013, 13, 4718–4730. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Rout, U.K. DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity. Int. J. Electr. Power Energy Syst. 2013, 49, 19–33. [Google Scholar] [CrossRef]
- Mohanty, B.; Panda, S.; Hota, P.K. Controller parameters tuning of differential evolution algorithm and its application to load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2014, 54, 77–85. [Google Scholar] [CrossRef]
- Rakhshani, E.; Luna, A.; Rouzbehi, K.; Rodriguez, P. Application of imperialist competitive algorithm to design an optimal controller for LFC problem. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 1223–1227. [Google Scholar]
- Padhan, S.; Sahu, R.K.; Panda, S. Application of firefly algorithm for load frequency control of multi-area interconnected power system. Electr. Power Compon. Syst. 2014, 42, 1419–1430. [Google Scholar] [CrossRef]
- Fini, M.H.; Yousefi, G.R.; Alhelou, H.H. Comparative study on the performance of many-objective and single-objective optimization algorithms in tuning load frequency controllers of multi-area power systems. IET Gener. Transm. Distrib. 2016, 10, 2915–2923. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Morel, J.; Bevrani, H.; Hiyama, T. Model predictive based load frequency control design concerning wind turbines. Int. J. Electr. Power Energy Syst. 2012, 43, 859–867. [Google Scholar] [CrossRef]
- Bevrani, H.; Daneshmand, P.R. Fuzzy logic-based load-frequency control concerning high penetration of wind turbines. IEEE Syst. J. 2012, 6, 173–180. [Google Scholar] [CrossRef]
- Qian, D.; Tong, S.; Liu, H.; Liu, X. Load frequency control by neural-network-based integral sliding mode for nonlinear power systems with wind turbines. Neurocomputing 2016, 173, 875–885. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Lee, K.Y. Coordinated distributed MPC for load frequency control of power system with wind farms. IEEE Trans. Ind. Electron. 2017, 64, 5140–5150. [Google Scholar] [CrossRef]
- Ma, M.; Liu, X.; Zhang, C. LFC for multi-area interconnected power system concerning wind turbines based on DMPC. IET Gener. Transm. Distrib. 2017, 11, 2689–2696. [Google Scholar] [CrossRef]
- Kumar, L.S.; Kumar, G.N.; Madichetty, S. Pattern search algorithm based automatic online parameter estimation for AGC with effects of wind power. Int. J. Electr. Power Energy Syst. 2017, 84, 135–142. [Google Scholar] [CrossRef]
- Abd-Elazim, S.M.; Ali, E.S. Load frequency controller design of a two-area system composing of PV grid and thermal generator via firefly algorithm. Neural Comput. Appl. 2016. [Google Scholar] [CrossRef]
- Camacho, E.F.; Alba, C.B. Model Predictive Control; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Kouro, S.; Cortés, P.; Vargas, R.; Ammann, U.; Rodríguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2009, 56, 1826–1838. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inf. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Geyer, T.; Quevedo, D.E. Performance of multistep finite control set model predictive control for power electronics. IEEE Trans. Power Electron. 2015, 30, 1633–1644. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Yoo, H.J.; Kim, H.M. Analyzing the impacts of system parameters on MPC-based frequency control for a stand-alone microgrid. Energies 2017, 10, 417. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.; Mitani, Y.; Hongesombut, K.; Kufeoglu, S. Virtual inertia control-based model predictive control for microgrid frequency stabilization considering high renewable energy integration. Sustainability 2017, 9, 773. [Google Scholar] [CrossRef]
- Lu, Y.Z.; Chen, Y.W.; Chen, M.R.; Chen, P.; Zeng, G.Q. Extremal Optimization: Fundamentals, Algorithms, and Applications; CRC Press & Chemical Industry Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Zeng, G.Q.; Chen, J.; Chen, M.R.; Dai, Y.X.; Li, L.M.; Lu, K.D.; Zheng, C.W. Design of multivariable PID controllers using real-coded population-based extremal optimization. Neurocomputing 2015, 151, 1343–1353. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Bevrani, H.; Hassan, A.A.; Hiyama, T. Decentralized model predictive based load frequency control in an interconnected power system. Energy Convers. Manag. 2011, 52, 1208–1214. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: New York, NY, USA, 2014. [Google Scholar]
- Zeng, G.Q.; Chen, J.; Dai, Y.X.; Li, L.M.; Zheng, C.W.; Chen, M.R. Design of fractional order PID controller for automatic regulator voltage system based on multi-objective extremal optimization. Neurocomputing 2015, 160, 173–184. [Google Scholar] [CrossRef]
- Zeng, G.Q.; Chen, J.; Li, L.M.; Chen, M.R.; Wu, L.; Dai, Y.X.; Zheng, C.W. An improved multi-objective population-based extremal optimization algorithm with polynomial mutation. Inf. Sci. 2016, 330, 49–73. [Google Scholar] [CrossRef]
- Wang, H.; Zeng, G.Q.; Dai, Y.X.; Bi, D.Q.; Sun, J.L.; Xie, X. Q. Design of fractional order frequency PID controller for an islanded microgrid: A multi-objective extremal optimization method. Energies 2017, 10, 1502. [Google Scholar] [CrossRef]
- Quan, D.M.; Ogliari, E.; Grimaccia, F.; Leva, S.; Mussetta, M. Hybrid model for hourly forecast of photovoltaic and wind power. In Proceedings of the IEEE International Conference on Fuzzy Systems, Hyderabad, India, 7–10 July 2013; pp. 1–6. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameters Setting |
|---|---|
| FA-PI [32] | Number of fireflies = 50, maximum number of generations = 100, the contrast of the attractiveness =1.0, the attractiveness = 0.1 at r = 0, randomization = 0.1. |
| GA-PI [32] | Population size = 50, maximum number of generations = 100, the crossover probability pc = 0.75, the mutation probability pm = 0.1. |
| PEO-PI [43] | Population size = 30,maximum number of generations = 100, shape parameter of MNUM mutation b = 2. |
| MPC | Prediction horizon P = 15, control horizon M = 10, weight vectors Q = EP×P, R = 0.01EM×M. |
| Experiment | Condition |
|---|---|
| Case 1 | Step increase in demand of thermal system, i.e., ΔPL1 = 0.1 |
| Case 2 | Step increase in demand of thermal system and PV generation, i.e., ΔPL1 = 0.1 and ΔPL2 = 0.1 |
| Case 3 | Parameter Tg increases and decreases 40% under ΔPL1 = 0.1 and ΔPL2 = 0.1 |
| Case 4 | Parameter Tt increases and decreases 40% under ΔPL1 = 0.1 and ΔPL2 = 0.1 |
| Case 5 | Dynamical fluctuations of ΔPL1 |
| Case 6 | Dynamical fluctuations of ΔPL2 |
| Algorithm | KP1 | KI1 | KP2 | KI2 |
|---|---|---|---|---|
| FA−PI [32] | −0.8811 | −0.5765 | −0.7626 | −0.8307 |
| GA−PI [32] | −0.5663 | −0.4024 | −0.5127 | −0.7256 |
| PEO−PI [43] | −0.8749 | −0.1373 | −1.999 | −1.9487 |
| Algorithm | IAE | ITAE | ISE | ITSE | Mp1 | tu1 | ts1 | Ess1 | Mp2 | tu2 | ts2 | Ess2 | Mp3 | tu3 | ts3 | Ess3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FA-PI | 41.38 | 117.76 | 5.29 | 8.83 | 0.07 | 3.12 | 11.75 | 1.89 × 10−5 | 0.07 | 3.15 | 11.71 | 2.22 × 10−5 | 0.06 | 3.85 | 3.85 | 5.68 × 10−7 |
| GA-PI | 59.32 | 227.11 | 7.60 | 18.03 | 0.11 | 3.61 | 15.11 | 1.30 × 10−4 | 0.10 | 3.63 | 15.11 | 1.02 × 10−4 | 0.07 | 4.83 | 8.28 | 5.87 × 10−6 |
| PEO-PI | 11.07 | 19.80 | 0.63 | 0.49 | 0.05 | 1.73 | 5.22 | 1.34 × 10−5 | 0.04 | 1.57 | 5.92 | 1.18 × 10−5 | 0.06 | 1.34 | 3.67 | 1.09 × 10−5 |
| MPC | 8.83 | 6.07 | 0.39 | 0.20 | 0.06 | 0.67 | 1.68 | 3.05 × 10−6 | 0.04 | 0.47 | 1.73 | 1.13 × 10−7 | 0.05 | 1.08 | 1.32 | 4.63 × 10−8 |
| Algorithm | IAE | ITAE | ISE | ITSE | Mp1 | tu1 | ts1 | Ess1 | Mp2 | tu2 | ts2 | Ess2 | Mp3 | tu3 | ts3 | Ess3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FA-PI | 42.99 | 114.54 | 5.77 | 8.69 | 0.07 | 2.94 | 11.67 | 1.98 × 10−5 | 0.07 | 3.07 | 11.64 | 2.17 × 10−5 | 0.06 | 3.84 | 3.84 | 5.08 × 10−7 |
| GA-PI | 60.80 | 221.79 | 8.29 | 17.81 | 0.11 | 3.43 | 14.95 | 1.07 × 10−4 | 0.11 | 3.5 | 14.97 | 9.82 × 10−5 | 0.07 | 4.63 | 8.14 | 7.70 × 10−6 |
| PEO-PI | 21.27 | 86.77 | 1.66 | 1.21 | 0.06 | 1.17 | 4.91 | 7.84 × 10−4 | 0.05 | 1.66 | 5.55 | 7.89 × 10−4 | 0.06 | 1.53 | 7.19 | 6.29 × 10−4 |
| MPC | 11.25 | 7.01 | 0.63 | 0.27 | 0.07 | 0.23 | 1.75 | 5.11 × 10−6 | 0.05 | 0.49 | 1.78 | 1.13 × 10−7 | 0.05 | 1.10 | 1.48 | 4.63 × 10−8 |
| Algorithm | Condition | IAE | ITAE | ISE | ITSE |
|---|---|---|---|---|---|
| FA-PI [32] | Tg increases 40% | 43.36 | 113.56 | 6.01 | 9.04 |
| GA-PI [32] | 62.65 | 225.38 | 8.72 | 18.81 | |
| PEO-PI [43] | 19.93 | 62.22 | 1.66 | 1.24 | |
| MPC | 10.97 | 7.38 | 0.66 | 0.33 | |
| FA-PI [32] | Tg decreases 40% | 42.38 | 112.71 | 5.65 | 8.55 |
| GA-PI [32] | 60.54 | 213.73 | 8.22 | 17.48 | |
| PEO-PI [43] | 19.3 | 60.93 | 1.53 | 1.11 | |
| MPC | 10.21 | 6.60 | 0.58 | 10.26 |
| Algorithm | Condition | IAE | ITAE | ISE | ITSE |
|---|---|---|---|---|---|
| FA-PI [32] | Tt increases 40% | 44.68 | 115.67 | 6.35 | 9.69 |
| GA-PI [32] | 64.83 | 241.76 | 9.14 | 20.39 | |
| PEO-PI [43] | 22.71 | 66.65 | 1.98 | 1.64 | |
| MPC | 14.83 | 12.63 | 1.00 | 0.68 | |
| FA-PI [32] | Tt decreases 40% | 42.36 | 112.38 | 5.57 | 8.39 |
| GA-PI [32] | 59.21 | 209.39 | 8.00 | 17.02 | |
| PEO-PI [43] | 19.32 | 61.32 | 1.47 | 1.06 | |
| MPC | 9.04 | 5.25 | 0.48 | 0.18 |
| Algorithm | Condition | IAE | ITAE | ISE | ITSE |
|---|---|---|---|---|---|
| FA-PI [32] | Case 5:Dynamical fluctuationsof ΔPL1 | 50.18 | 502.38 | 5.35 | 12.58 |
| GA-PI [32] | 71.70 | 829.83 | 7.57 | 22.8 | |
| PEO-PI [43] | 32.60 | 908.93 | 0.85 | 7.12 | |
| MPC | 12.78 | 161.44 | 0.42 | 2.03 | |
| FA-PI [32] | Case 6: Dynamical fluctuationsof ΔPL2 | 133.27 | 6034.24 | 8.62 | 341.94 |
| GA-PI [32] | 196.33 | 9514.9 | 12.8 | 541.8 | |
| PEO-PI [43] | 39.06 | 1287.35 | 1.3 | 28.93 | |
| MPC | 14.02 | 468.56 | 0.32 | 6.92 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, G.-Q.; Xie, X.-Q.; Chen, M.-R. An Adaptive Model Predictive Load Frequency Control Method for Multi-Area Interconnected Power Systems with Photovoltaic Generations. Energies 2017, 10, 1840. https://doi.org/10.3390/en10111840
Zeng G-Q, Xie X-Q, Chen M-R. An Adaptive Model Predictive Load Frequency Control Method for Multi-Area Interconnected Power Systems with Photovoltaic Generations. Energies. 2017; 10(11):1840. https://doi.org/10.3390/en10111840
Chicago/Turabian StyleZeng, Guo-Qiang, Xiao-Qing Xie, and Min-Rong Chen. 2017. "An Adaptive Model Predictive Load Frequency Control Method for Multi-Area Interconnected Power Systems with Photovoltaic Generations" Energies 10, no. 11: 1840. https://doi.org/10.3390/en10111840