Re-Creating Waves in Large Currents for Tidal Energy Applications



Abstract
1. Introduction
- If linear wave-current theory combined with reflection analysis can be used to predict wave-induced water particle velocities (and hence, reduce uncertainty in estimating full-scale wave-induced turbine loads) for waves in fast large currents typical of tidal energy sites
- Experimental results of the decay of wave-induced particle velocities with depth and comparison to the adapted linear wave theory
- Effect of current on the wave fields produced for tank testing
- Issues with re-creating combined wave-current conditions in test tanks
2. Theory and Methodology
2.1. Wave-Current Theory
2.1.1. Wave Modification by Current
2.1.2. Wave-Induced Particle Velocities
2.2. Incorporating Wave Reflection
2.2.1. Isolating Incident and Reflected Waves
2.2.2. Incorporating Reflected Waves into Wave-Induced Particle Velocities
3. Experimental Setup and Conditions’ Definition
3.1. The FloWave Ocean Energy Research Facility
3.2. Experimental Design
3.2.1. Instrument Configuration
3.2.2. Test Plan
4. Results and Discussion
4.1. Corrected Irregular Sea States
4.2. Effect of Current on Waves
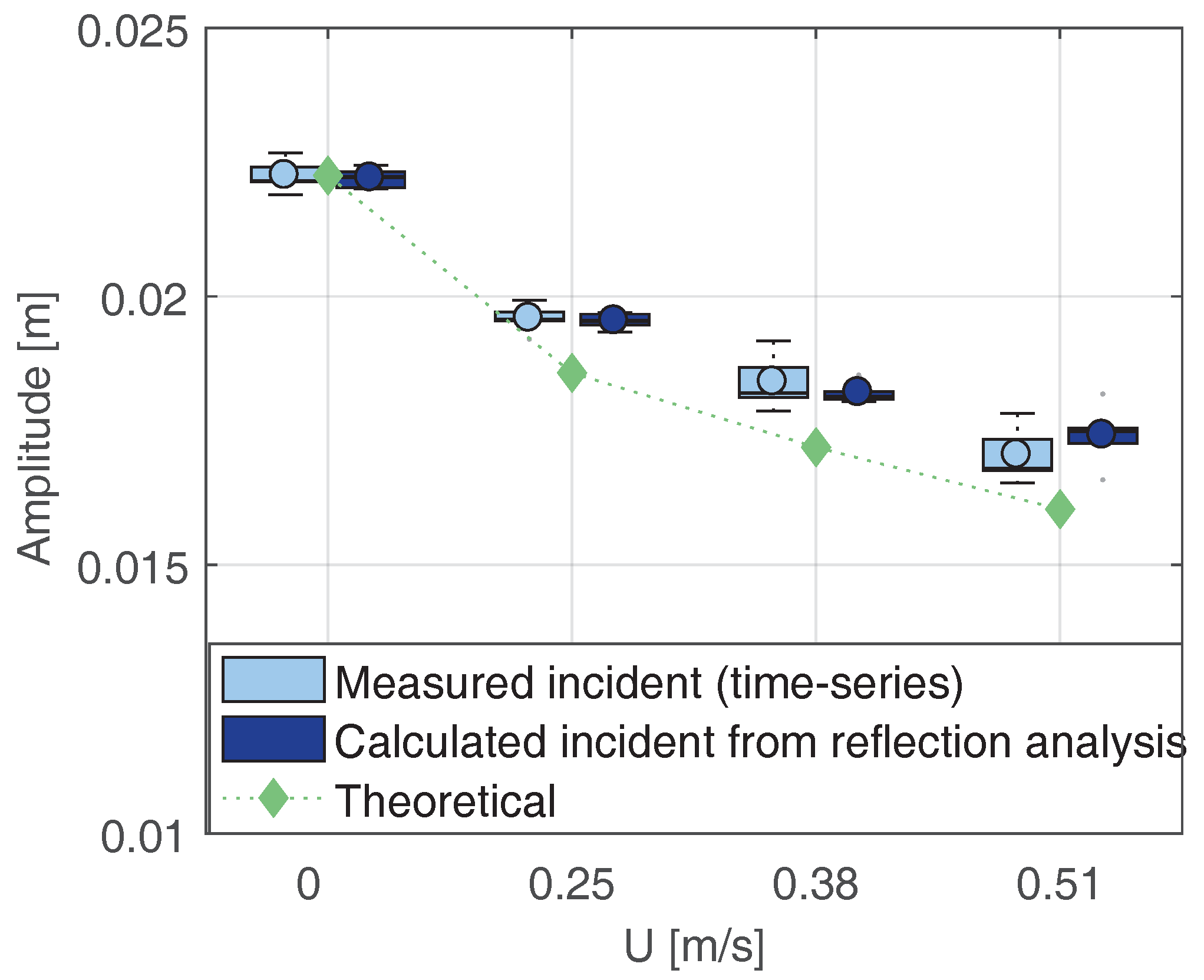
4.2.1. Wave Height Modification by Current
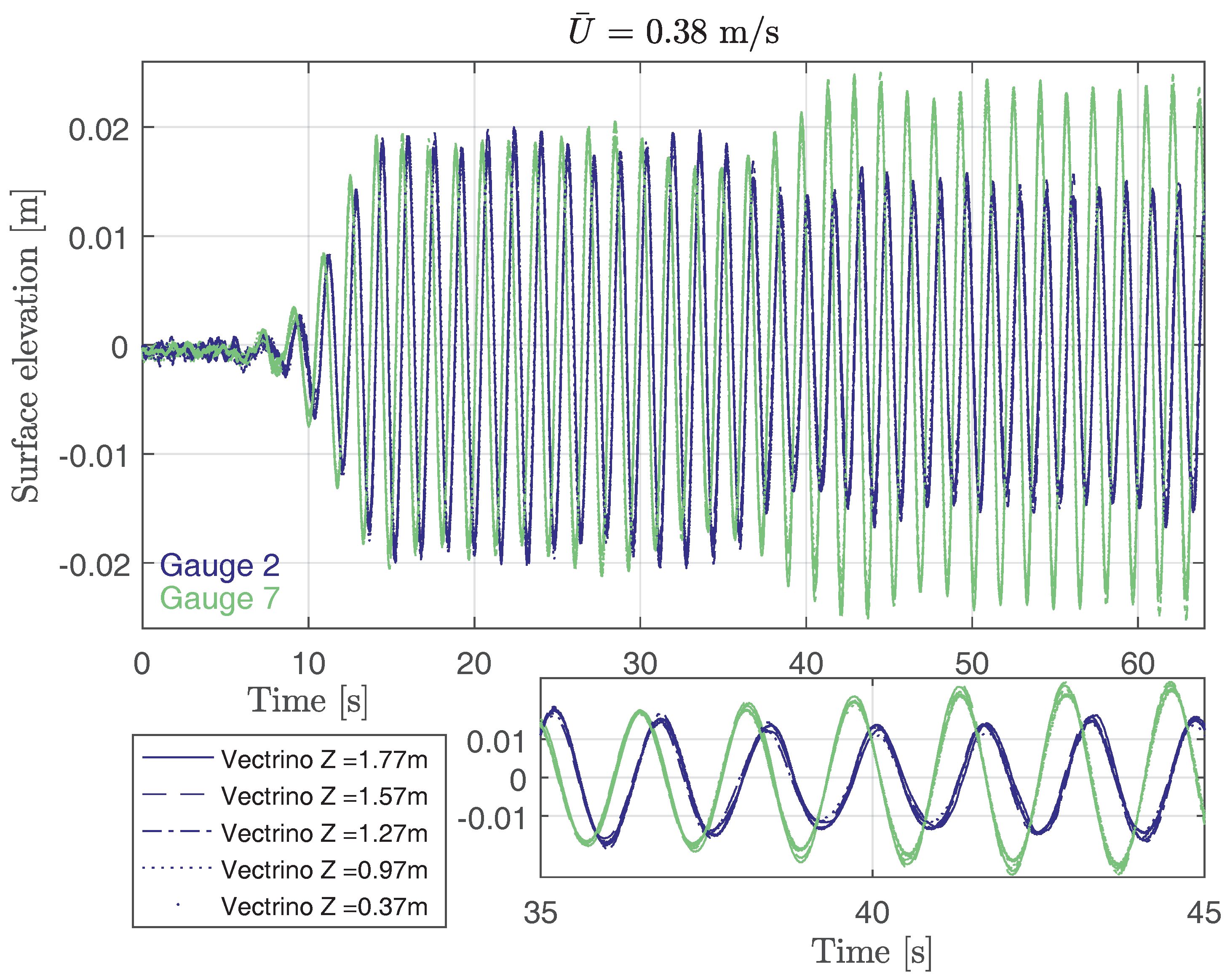
4.2.2. Repeatability and Stationarity
4.3. Separating Incident and Reflected Waves
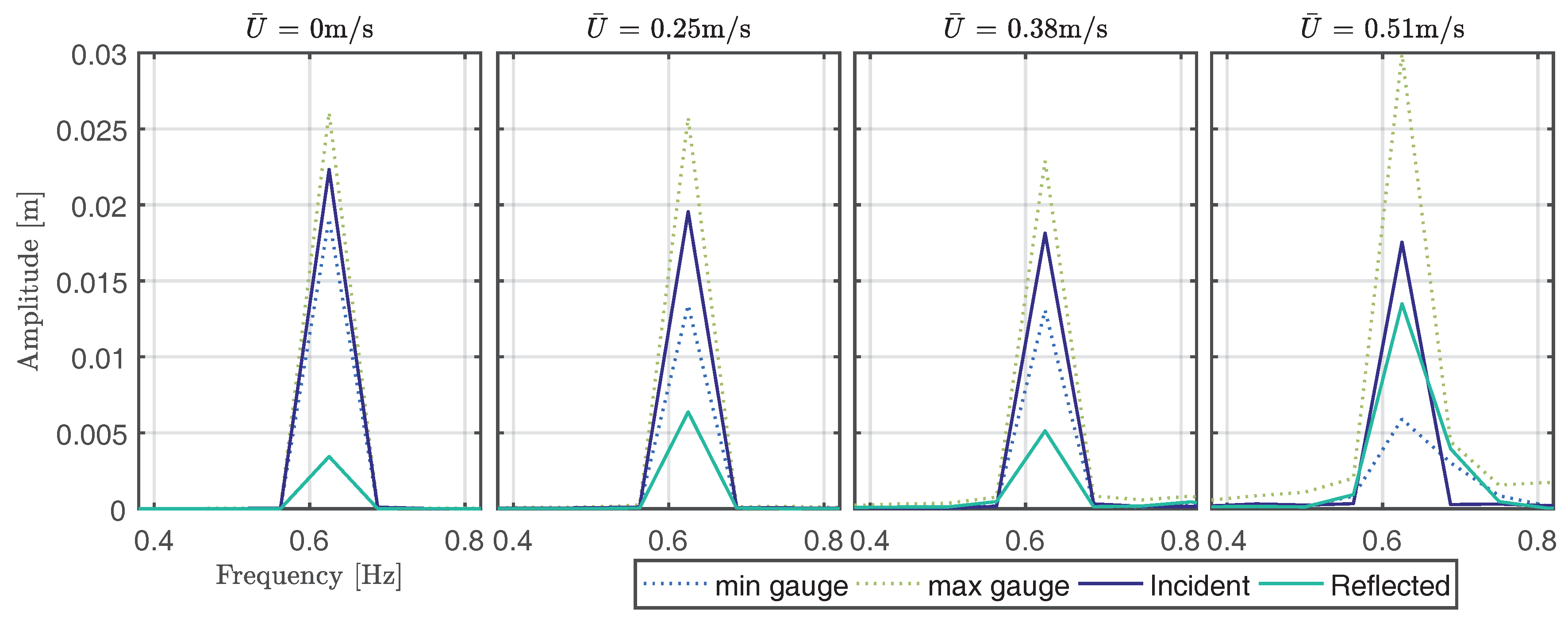
4.3.1. Isolation of Incident and Reflected Spectra
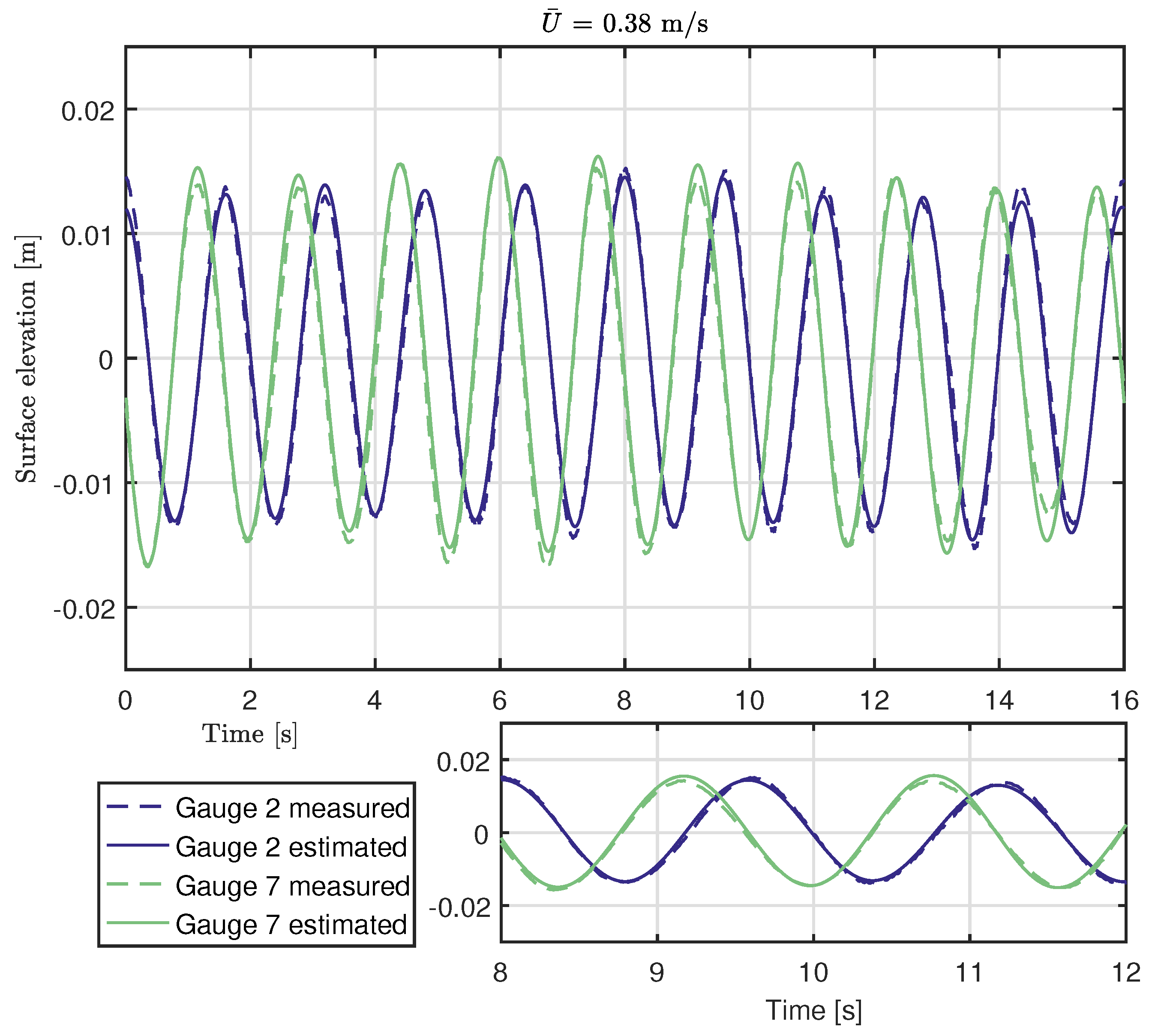
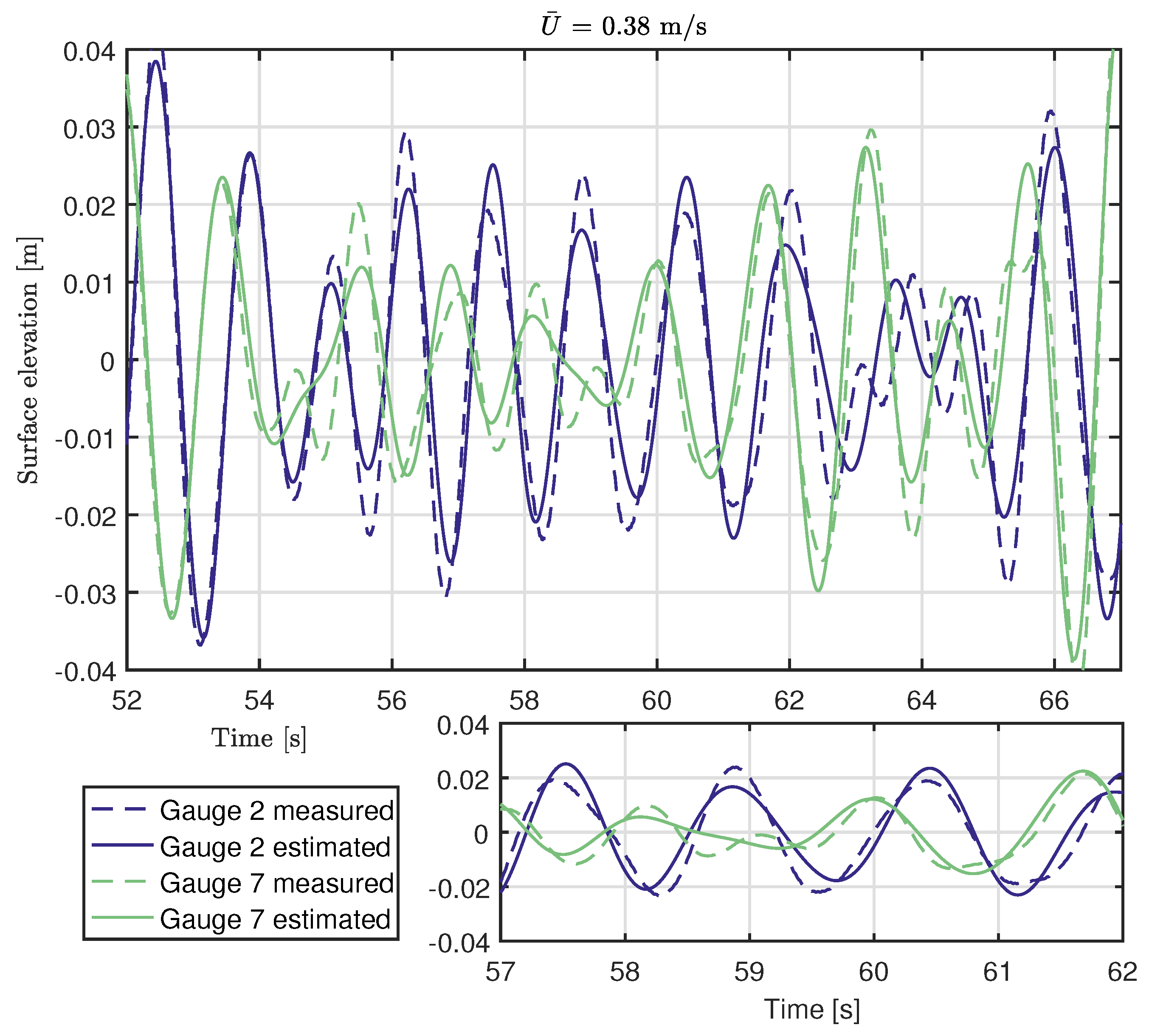
4.3.2. Prediction of Time Series
4.4. Wave-Induced Particle Velocities in Combined Wave-Current Fields
4.4.1. Regular
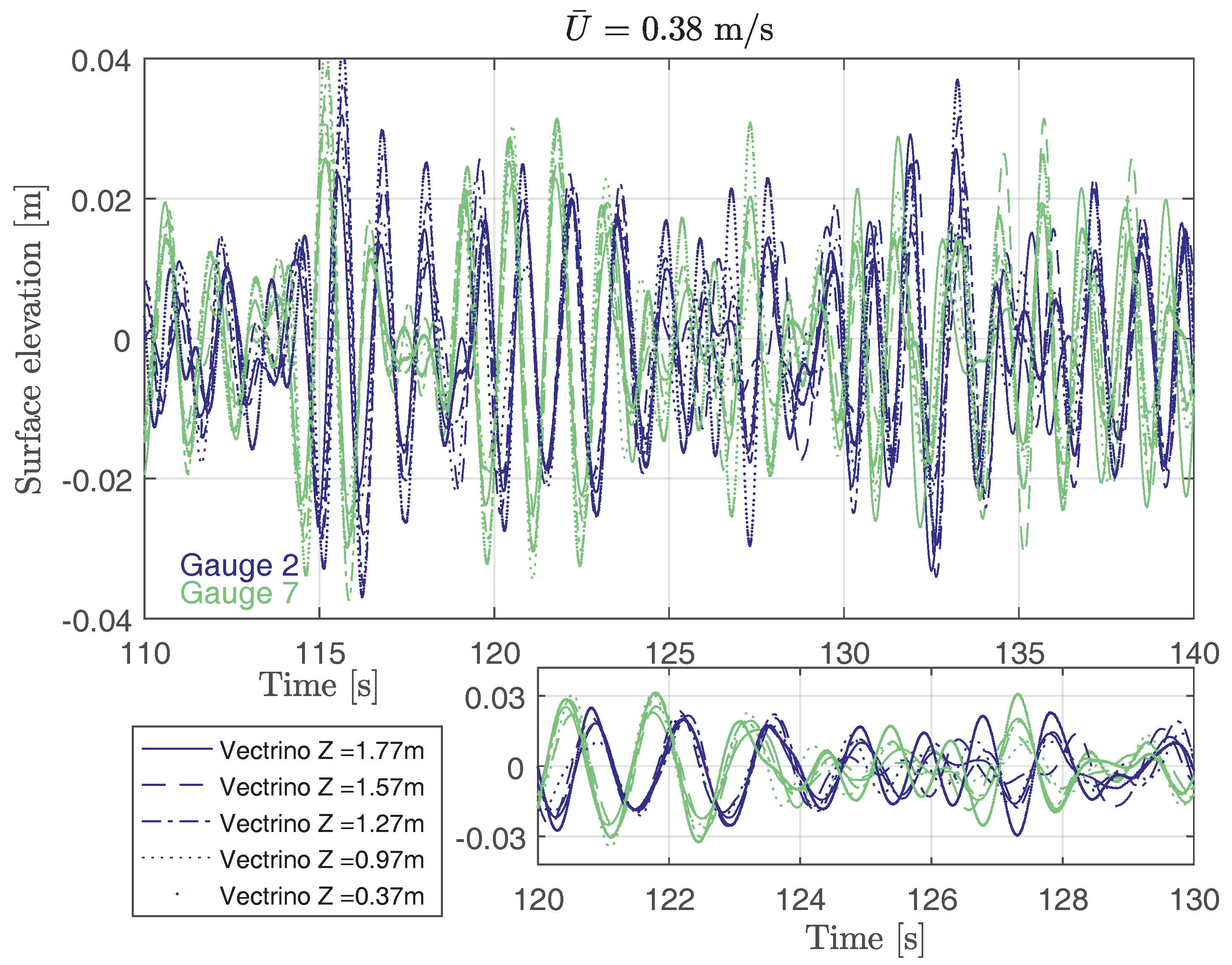
4.4.2. Irregular
5. Implications of Findings
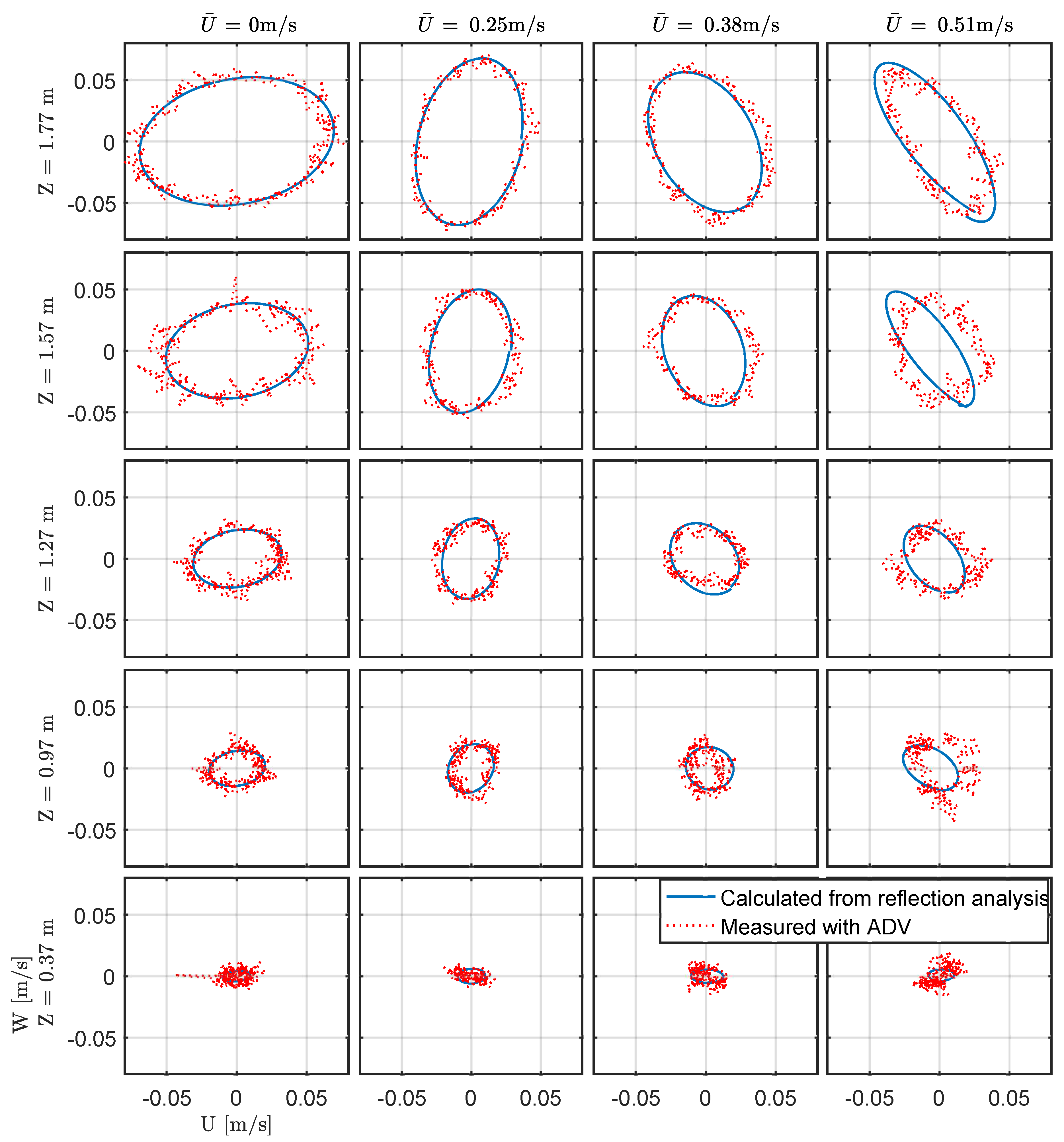
- Ability of linear wave theory, with reflection analysis, to predict wave-induced particle velocities:It is clear that the theory presented in Section 2 is able to predict the wave-induced velocities for low to medium-high current velocities, including the accurate prediction of wave orbital motions. This is applied to the 0.25-m/s and 0.38-m/s cases corresponding to 1.2 m/s and 1.8 m/s full scale. For waves in very large currents, 0.51 m/s tank scale (2.4 m/s full scale), the theory still provides useful estimates, but is notably less accurate. This is likely due to calculations being carried out in the frequency-domain and the inherent assumption of stationarity no longer being a good approximation.This ability to predict the wave-induced velocities for the more complex situation of having significant wave reflection present gives confidence that it can be applied when there is no reflection, e.g., in numerical models or when analysing site data. It also enables the attribution of velocities induced by wave reflection and gives the ability to compensate or remove these components from key test outcomes that are dependent on velocity, e.g., turbine power fluctuations or blade bending moments.
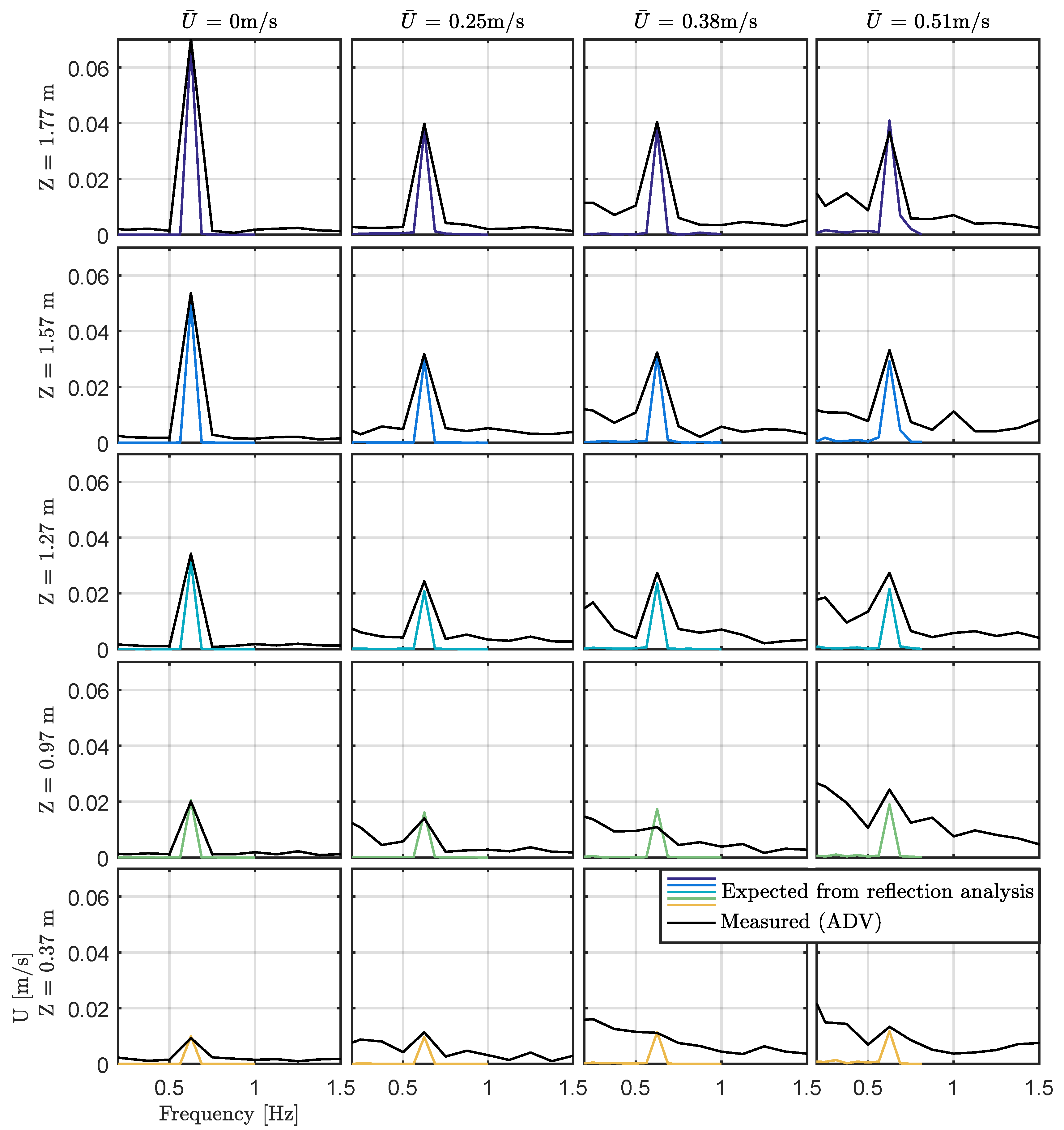
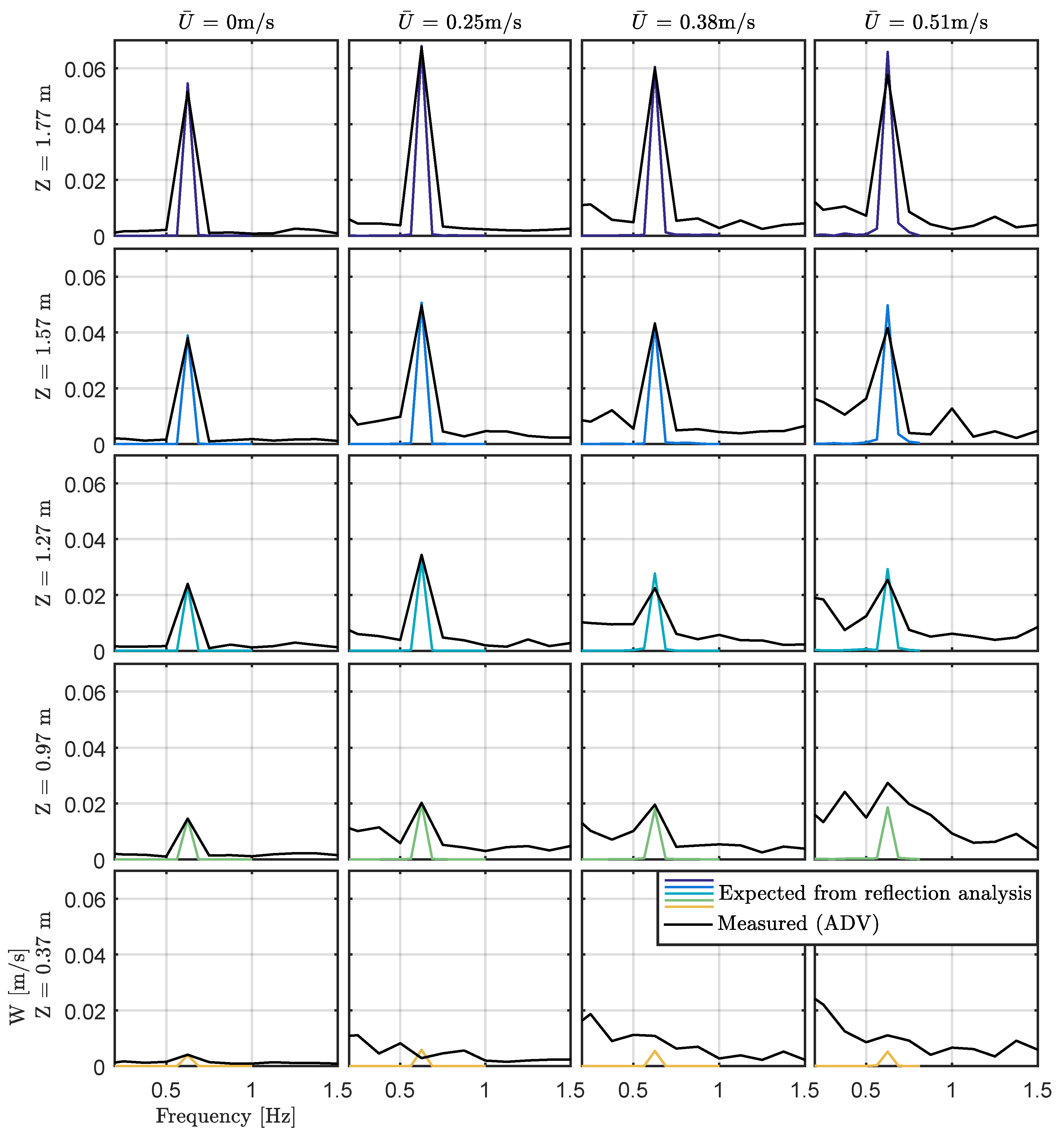
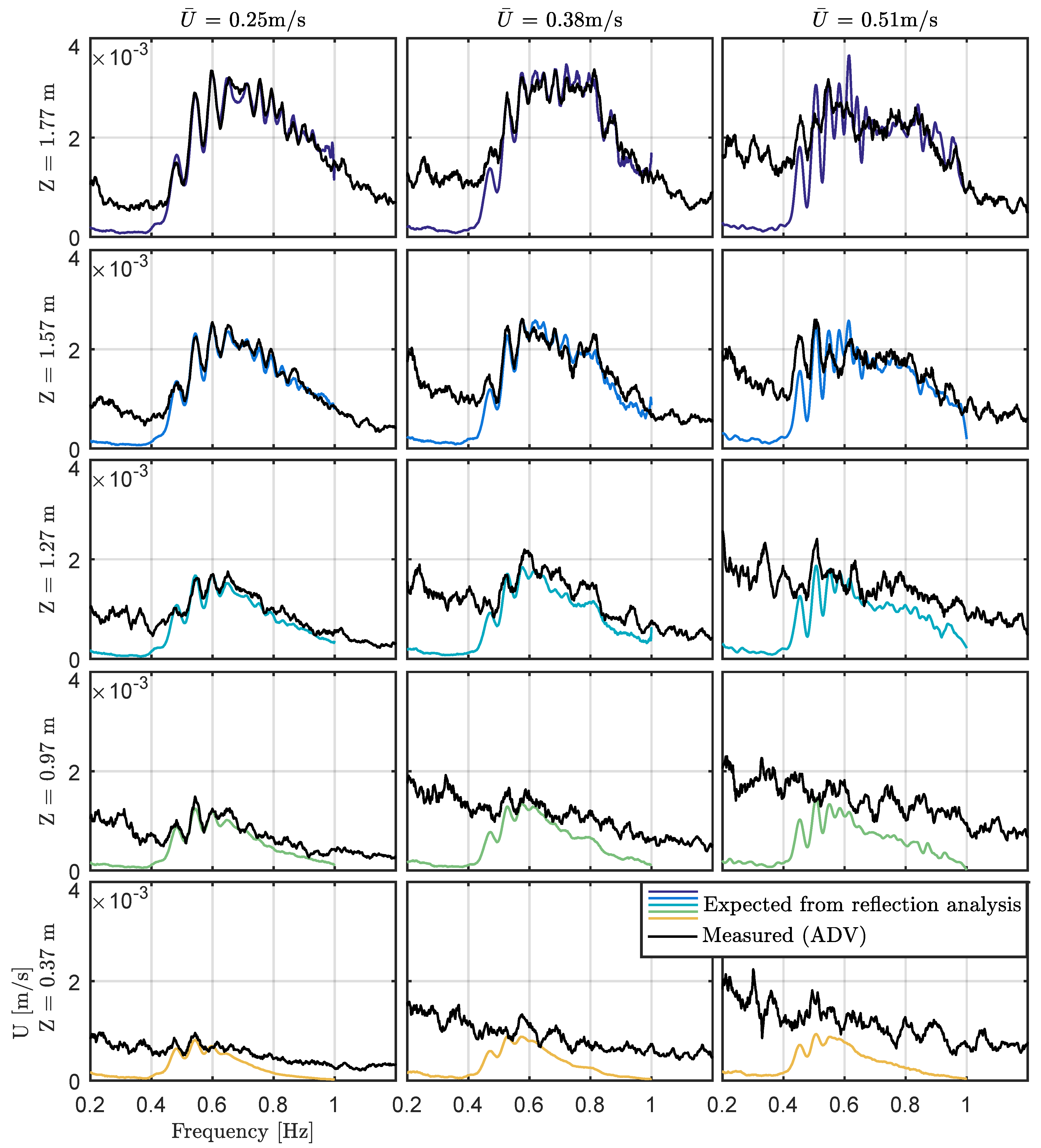
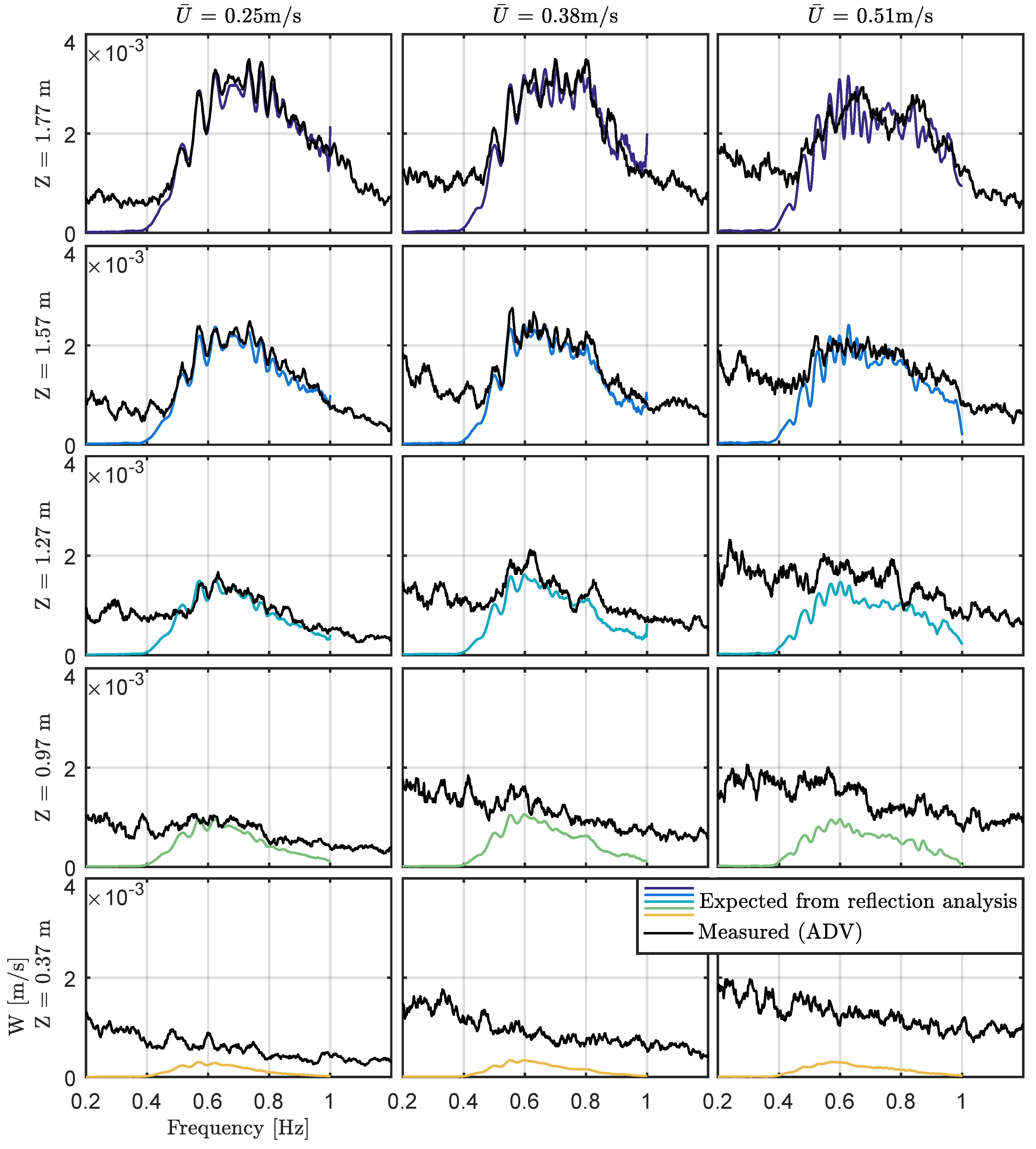
- Experimental results of wave-induced particle velocities with depth:The results of velocity spectra with depth reveal two essential points. First is that linear wave-current theory can be used to predict the decay of waves with depth fairly accurately, particularly for lower flow conditions. Second is that for low to medium-high current velocities, the wave effects completely dominate the velocity fluctuations in the upper region of the water column. Expected wave-induced velocities alone can be used to predict the energy content, and it appears that underlying turbulence at these frequencies becomes insignificant. There is a limitation to this, which is evident in the data: for waves that are higher frequency, lower amplitude and measured lower in the water column, this statement will be less appropriate. In addition, turbulence will dominate at the bottom boundary due to the significance of turbulence-generating mechanisms relative to the influence of highly attenuated waves.
- Effect of current on the wave field:The current is found to affect the wave field in a number of ways. Current alters the form of the waves, including wave height and wavenumbers, but also alters a number of other aspects of wave statistics. Turbulent fluctuations cause a significant decrease in stationarity, as the changes in velocity alter the amplitudes and phases of measured wave components. For tank tests, this decreases repeatability, which is worsened in larger currents and when there is significant high frequency wave content. At FloWave, the presence of current also increases wave reflection, which is time-varying and further reduces the assumptions of stationarity. This aspect, however, can be overcome by choosing a time-section when reflections are both present and stable.
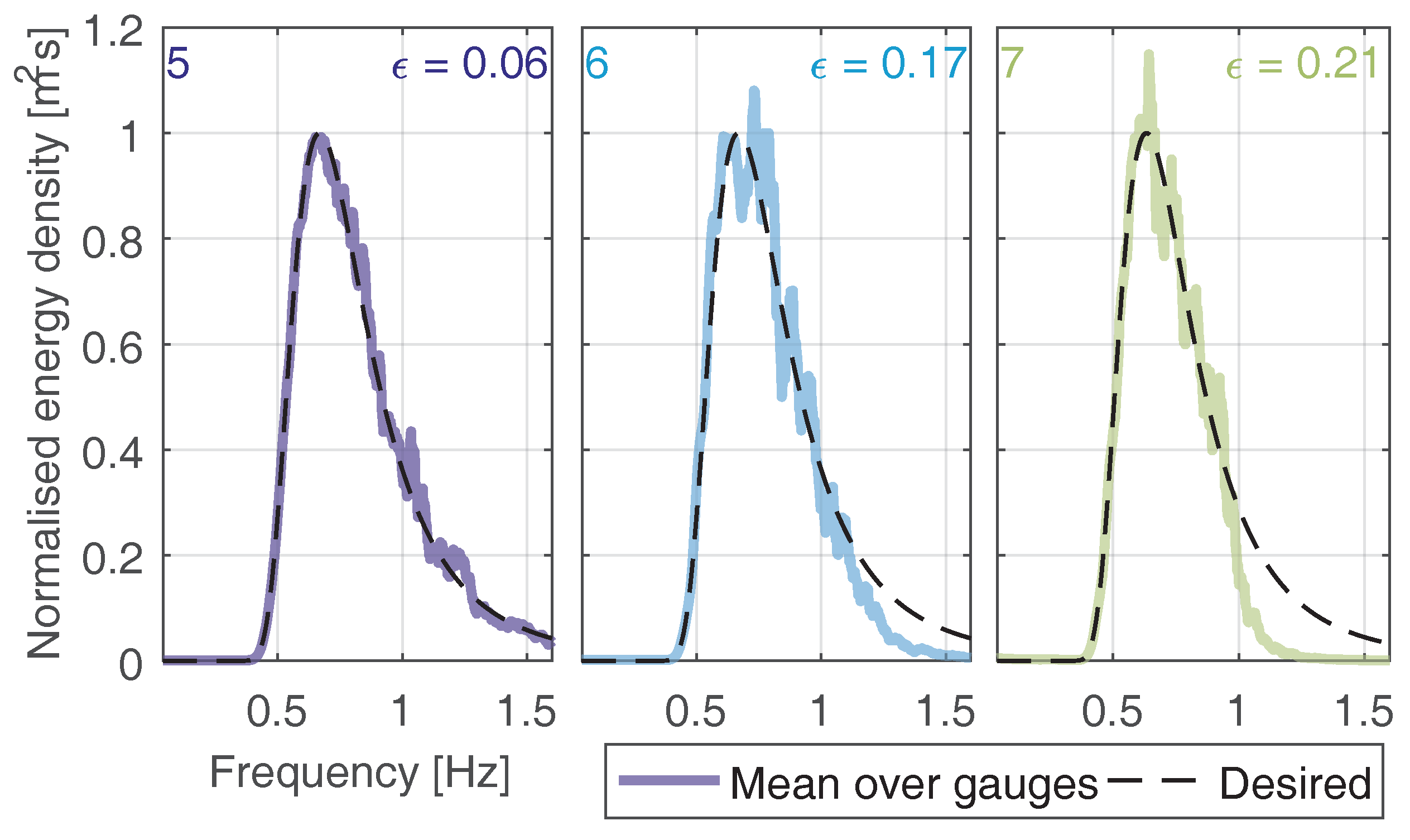
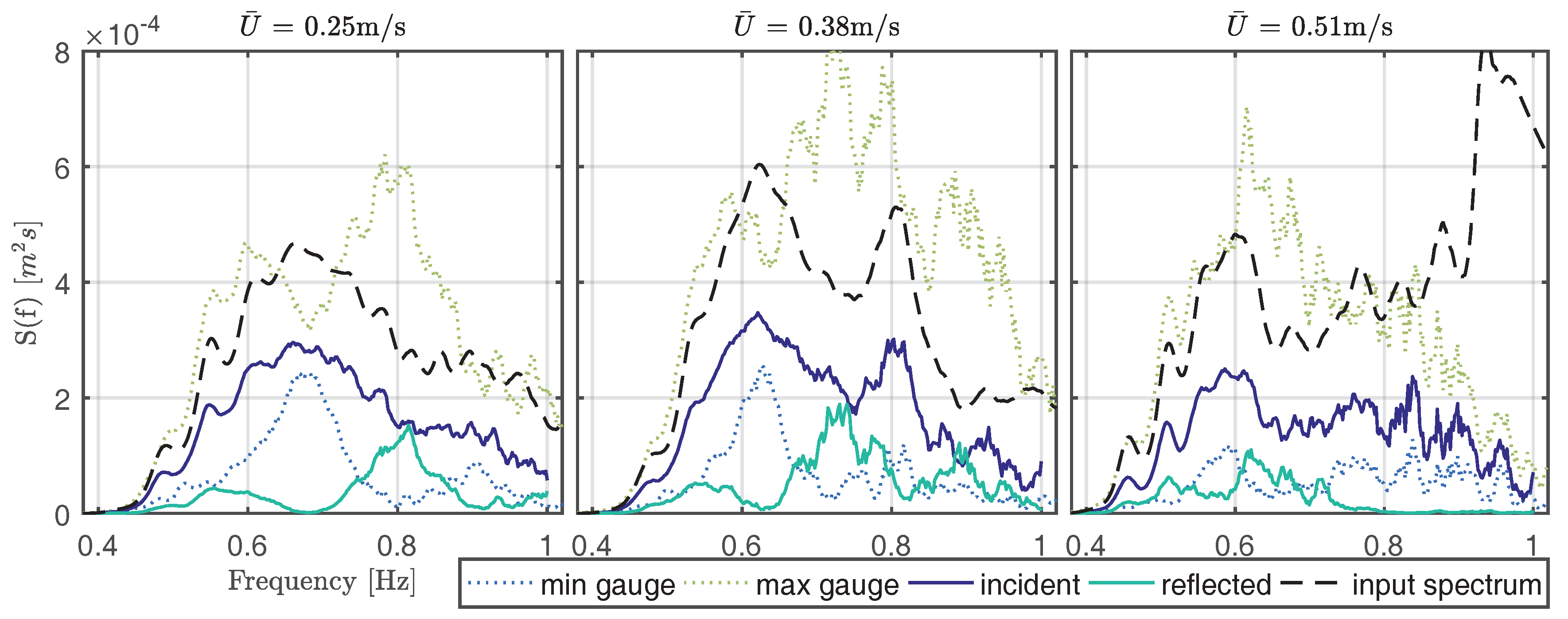
- Issues with re-creating combined wave-current conditions in test tanks:In addition to the issues of stationarity and repeatability summarised in point 3 (above), there are other issues with re-creating site wave-current conditions in test tanks. One such issue is dealing with the presence of reflections, discussed in detail in this paper. Reflections cause mean spectra over an array of gauges to differ significantly from the incident spectra. Mean spectra were used for corrections in this case; yet, even if incident spectra were corrected, the vertical and horizontal velocities will differ notably from site data due to the presence of reflections. This is evident from Figure 16 and Figure 17 where essentially this ‘spiky’ variation in the spectra is unavoidable.Another issue, touched upon in Section 3.2.2 and Section 4.1, is that there is not much control over the nature of the current other than its principal direction and speed. Matching turbulence statistics or depth profiles to site equivalents was not possible at FloWave and is typically not achievable in any of the larger test facilities. The nature of the turbulence will have significant implications of TST loads and performance [28] and as such remains a major challenge if true similitude to site wave-current conditions is to be attained. It is, in certain facilities, possible to deploy turbulence-modifying grids as detailed and discussed in [29,30,31], and this approach has been used to vary turbulence in test conditions for TSTs [28,32]. This, however, is typically much easier to achieve in small tanks and flumes. For larger facilities, the potential size of grids poses a practical challenge, along with the effect of flow diversion if only locally deployed. For FloWave, a large basin of circular geometry, a system has yet to be developed.The results presented in this paper are all for uni-directional waves in collinear following currents. In the real world, however, wave conditions may be significantly directionally spread and may propagate at various angles to the current field. This directionality has the potential to significantly alter the loading on a device and as such is an important aspect to consider. At present, however, in order to accurately reproduce and characterise these more complicated directional wave-current conditions, additional measurement and analysis techniques are required. It is necessary to resolve incident and reflected component wave angles in addition to amplitudes, which is thought possible through the extension of the least-squares approach presented. At present, however, this remains an element for further work.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Carbon Trust. UK Tidal Current Resource and Economics Study. 2011. Available online: https://www.carbontrust.com/media/77264/ctc799_uk_tidal_current_resource_and_economics.pdf (accessed on 27 September 2017).
- Black&Veach. Technical Report: Phase II. UK Tidal Stream Energy Resource Assessment. Available online: https://www.carbontrust.com/media/174041/phaseiitidalstreamresourcereport2005.pdf (accessed on 27 September 2017).
- Atlantis. MeyGen | Tidal Projects | Atlantis Resources. Available online: https://www.atlantisresourcesltd.com/projects/meygen/ (accessed on 1 August 2017).
- Milne, I.A.; Sharma, R.N.; Flay, R.G.J.; Bickerton, S. The Role of Waves on Tidal Turbine Unsteady Blade Loading. In Proceedings of the 3rd International Conference on Ocean Energy, Bilbao, Spain, 6–8 October 2010; pp. 1–6. [Google Scholar]
- Faudot, C.; Dahlhaug, O.G. Prediction of wave loads on tidal turbine blades. Energy Procedia 2012, 20, 116–133. [Google Scholar] [CrossRef]
- Luznik, L.; Flack, K.A.; Lust, E.E.; Taylor, K. The effect of surface waves on the performance characteristics of a model tidal turbine. Renew. Energy 2013, 58, 108–114. [Google Scholar] [CrossRef]
- Fulton, J.; Luznik, L.; Flack, K.; Lust, E. Effects of waves on BEM theory in a marine tidal turbine environment. In Proceedings of the OCEANS’15 MTS/IEEE, Washington, DC, USA, 19–22 October 2015. [Google Scholar]
- Tatum, S.C.; Frost, C.H.; Allmark, M.; O’Doherty, D.M.; Mason-Jones, A.; Prickett, P.W.; Grosvenor, R.I.; Byrne, C.B.; O’Doherty, T. Wave-current interaction effects on tidal stream turbine performance and loading characteristics. Int. J. Mar. Energy 2016, 14, 161–179. [Google Scholar] [CrossRef]
- EPSRC. FloWTurb: Response of Tidal Energy Converters to Combined Tidal Flow, Waves, and Turbulence. Available online: http://gow.epsrc.ac.uk/NGBOViewGrant.aspx?GrantRef=EP/N021487/1 (accessed on 15 August 2017).
- FloWTurb. FloWTurb Research Group Home page | FloWTurb Research Group. Available online: http://www.flowturb.eng.ed.ac.uk/ (accessed on 1 August 2017).
- Ingram, D.; Wallace, R.; Robinson, A.; Bryden, I. The design and commissioning of the first, circular, combined current and wave test basin. In Proceedings of the Oceans 2014, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]
- Holmes, B. Tank Testing of Wave Energy Conversion Systems. Available online: http://www.emec.org.uk/tank-testing-of-wave-energy-conversion-systems/ (accessed on 27 September 2017).
- Sutherland, D.R.J.; Noble, D.R.; Steynor, J.; Davey, T.A.D.; Bruce, T. Characterisation of Current and Turbulence in the FloWave Ocean Energy Research Facility. Ocean Eng. 2017, 139, 103–115. [Google Scholar] [CrossRef]
- Jonsson, I.G. Wave-current Interactions. In The Sea, Ocean Engineering Science; LeMehaute, B., Hanes, D.M., Eds.; Wiley-Interscience Publications: New York, NY, USA, 1990; Volume 9, pp. 65–120. [Google Scholar]
- Smith, J.M. One-Dimensional Wave-Current Interaction. Available online: http://www.dtic.mil/dtic/tr/fulltext/u2/a588666.pdf (accessed on 27 September 2017).
- Baddour, R.E.; Song, S. On the interaction between waves and currents. Ocean Eng. 1990, 17, 1–21. [Google Scholar] [CrossRef]
- Draycott, S.; Steynor, J.; Davey, T.; Ingram, D.M. Isolating Incident and Reflected Wave Spectra in the Presence of Current. Coast. Eng. J. 2017, submitted. [Google Scholar]
- Zelt, J.A.; Skjelbreia, J. Estimating Incident and Reflected Wave Fields Using an Arbitrary Number of Wave Gauges. Coast. Eng. Proc. 1992, 1, 777–789. [Google Scholar]
- Robinson, A.; Ingram, D.; Bryden, I.; Bruce, T. The generation of 3D flows in a combined current and wave tank. Ocean Eng. 2015, 93, 1–10. [Google Scholar] [CrossRef]
- Noble, D.R.; Davey, T.; Smith, H.C.M.; Kaklis, P.; Robinson, A.; Bruce, T. Characterisation of spatial variation in currents generated in the FloWave Ocean Energy Research Facility. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015; pp. 1–8. [Google Scholar]
- Draycott, S.; Davey, T.; Ingram, D.M.; Day, A.; Johanning, L. The SPAIR method: Isolating incident and reflected directional wave spectra in multidirectional wave basins. Coast. Eng. 2016, 114, 265–283. [Google Scholar] [CrossRef]
- Sellar, B.; Harding, S.; Richmond, M. High-resolution velocimetry in energetic tidal currents using a convergent-beam acoustic Doppler profiler. Meas. Sci. Technol. 2015, 26. [Google Scholar] [CrossRef]
- Sellar, B. Metocean Data Set from the ReDAPT Tidal Project: Part 2 of 7, 2011–2014; Technical report; University of Edinburgh: Edinburgh, Scotland, 2016. [Google Scholar]
- Sellar, B. Metocean Data Set from the ReDAPT Tidal Project: Part 1 of 7, 2011–2014 [dataset]; Technical Report; University of Edinburgh: Edinburgh, UK, 2016. [Google Scholar]
- Sutherland, D.R.J.; Sellar, B.G.; Bryden, I. The use of Doppler Sensor Arrays to Characterise Turbulence at Tidal Energy Sites. In Proceedings of the 4th International Conference on Ocean Energy, Dublin, Ireland, 17–19 October 2012. [Google Scholar]
- Pierson, W.J.J.; Moskowitz, L. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP). Ergnzungsheft zur Deutschen Hydrographischen Zeitschrift Reihe 1973, A(8), 95. [Google Scholar]
- Blackmore, T.; Myers, L.E.; Bahaj, A.S. Effects of turbulence on tidal turbines: Implications to performance, blade loads, and condition monitoring. Int. J. Mar. Energy 2016, 14, 1–26. [Google Scholar] [CrossRef]
- Blackmore, T.; Batten, W.M.J.; Muller, G.U.; Bahaj, A.S. Influence of turbulence on the drag of solid discs and turbine simulators in a water current. Exp. Fluids 2014, 55, 1637. [Google Scholar] [CrossRef]
- Fransson, T.K.; M, J.H. Grid-generated turbulence revisited. Fluid Dyn. Res. 2009, 41, 21403. [Google Scholar]
- Hearst, R.J. Fractal, Classical, and Active Grid Turbulence: From Production to Decay. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2015. [Google Scholar]
- Myers, L.E.; Shah, K.; Galloway, P.W. Design, commissioning and performance of a device to vary the turbulence in a recirculating flume. In Proceedings of the 10th European Wave and Tidal Energy Conference, Aalborg, Denmark, 2–5 September 2013. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gauge Number | x Position (m) |
|---|---|
| 1 | 2.016 |
| 2 | 1.854 |
| 3 | 1.583 |
| 4 | 1.258 |
| 5 | 1.150 |
| 6 | 0.879 |
| 7 | 0.338 |
| Position | z Position from Tank Floor (m) |
|---|---|
| 1 | 1.77 |
| 2 | 1.57 |
| 3 | 1.27 |
| 4 | 0.97 |
| 5 | 0.37 |
| Sea State | Type | (m/s) | (m) (Reg.) or (m) (Irreg.) | T (s) (Reg.) or (s) (Irreg.) | Repeat Time, (s) | Run Time, (s) |
|---|---|---|---|---|---|---|
| 1 | Regular | 0 | 0.049 | 1.6 | 8 | 64 |
| 2 | Regular | 0.25 | 0.049 | 1.6 | 8 | 64 |
| 3 | Regular | 0.38 | 0.049 | 1.6 | 8 | 64 |
| 4 | Regular | 0.51 | 0.049 | 1.6 | 8 | 64 |
| 5 | Irregular | 0.25 | 0.046 | 1.50 | 512 | 545 |
| 6 | Irregular | 0.38 | 0.049 | 1.50 | 512 | 545 |
| 7 | Irregular | 0.51 | 0.043 | 1.58 | 512 | 545 |
| Sea State | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 0.994 | 0.993 | 0.988 | 0.931 | 0.691 | 0.592 | 0.522 |
| Sea State | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| 0.994 | 0.996 | 0.984 | 0.914 | 0.781 | 0.816 | 0.884 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Draycott, S.; Sutherland, D.; Steynor, J.; Sellar, B.; Venugopal, V. Re-Creating Waves in Large Currents for Tidal Energy Applications. Energies 2017, 10, 1838. https://doi.org/10.3390/en10111838
Draycott S, Sutherland D, Steynor J, Sellar B, Venugopal V. Re-Creating Waves in Large Currents for Tidal Energy Applications. Energies. 2017; 10(11):1838. https://doi.org/10.3390/en10111838
Chicago/Turabian StyleDraycott, Samuel, Duncan Sutherland, Jeffrey Steynor, Brian Sellar, and Vengatesan Venugopal. 2017. "Re-Creating Waves in Large Currents for Tidal Energy Applications" Energies 10, no. 11: 1838. https://doi.org/10.3390/en10111838
APA StyleDraycott, S., Sutherland, D., Steynor, J., Sellar, B., & Venugopal, V. (2017). Re-Creating Waves in Large Currents for Tidal Energy Applications. Energies, 10(11), 1838. https://doi.org/10.3390/en10111838