
Integrated Traction Control Strategy for Distributed Drive Electric Vehicles with Improvement of Economy and Longitudinal Driving Stability

Abstract
:1. Introduction
- (1)
- Propose an economy-based traction allocation method;
- (2)
- Apply Bayes’ theorem to determine the optimal slip ratio under a specific road surface;
- (3)
- Design a sliding mode controller to track the desired optimal slip ratio;
- (4)
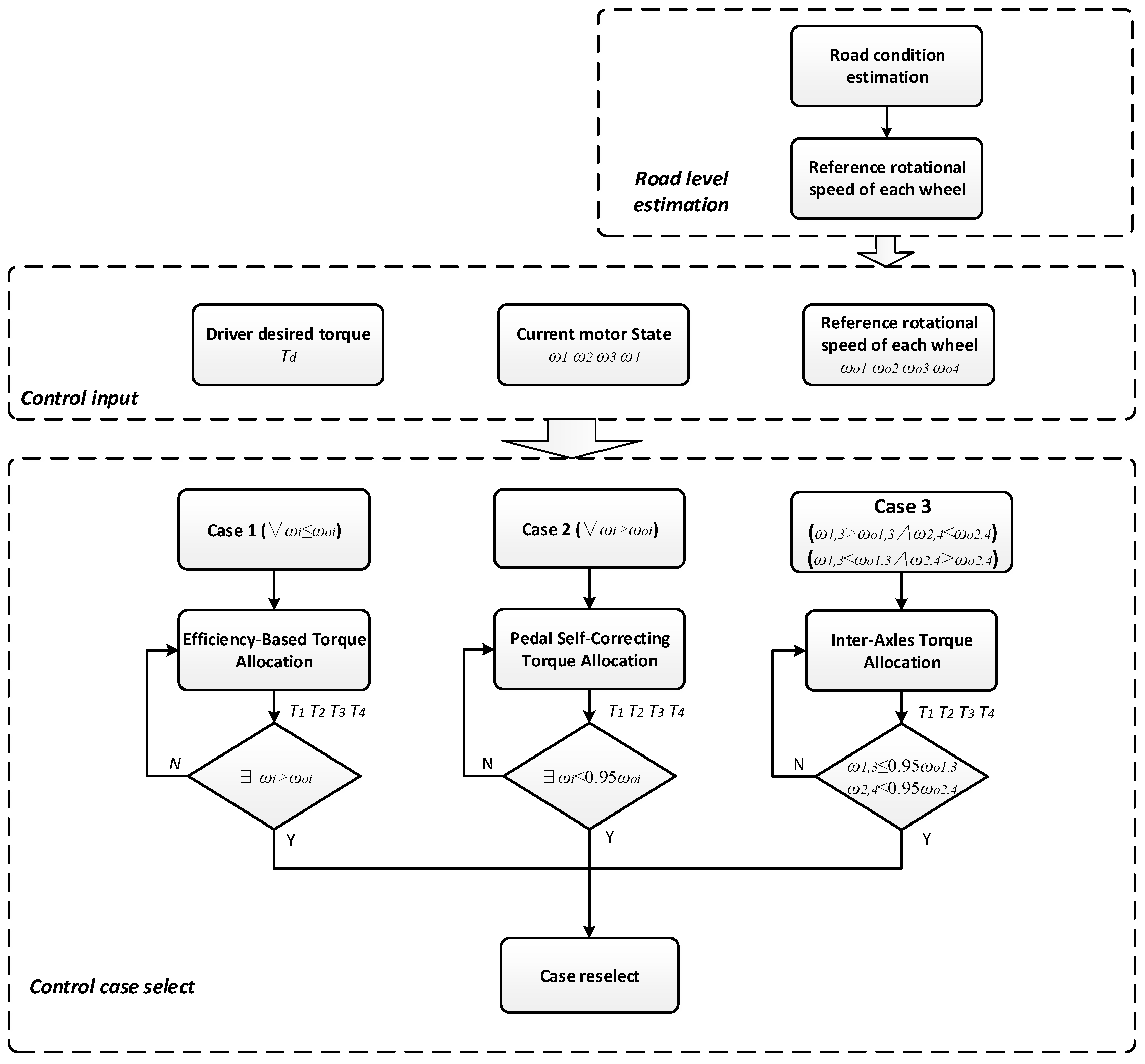
- Build a framework integrating vehicle economy and longitudinal stability control with three traction allocation cases (economy-based traction allocation, pedal self-correcting traction allocation and inter-axles traction allocation).
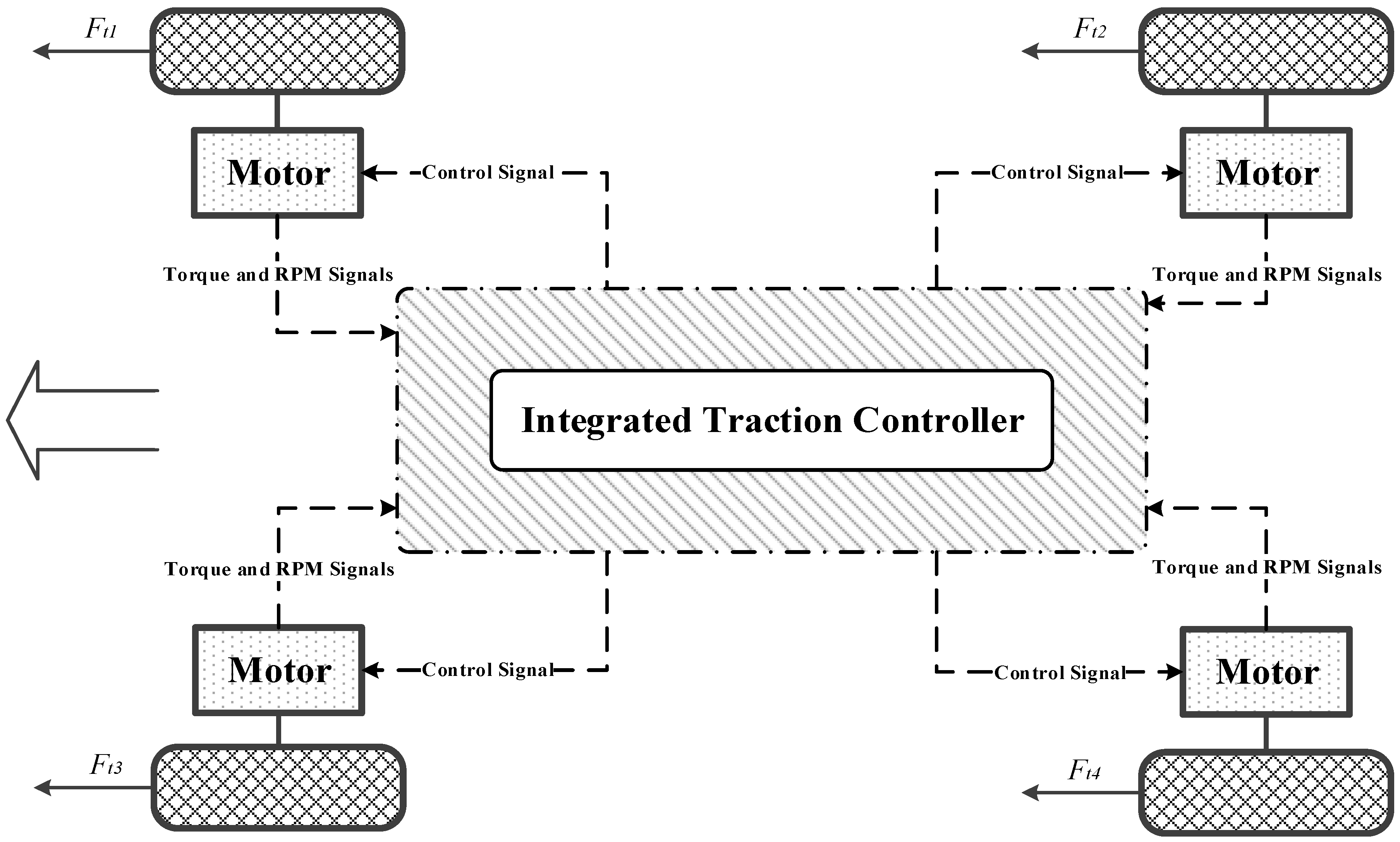
2. System Modeling
2.1. Vehicle Dynamics Model
2.2. Motor Model
3. Integrated Control Strategy Design
3.1. Economy Control
3.1.1. Objective Functions Establishment
- (1)
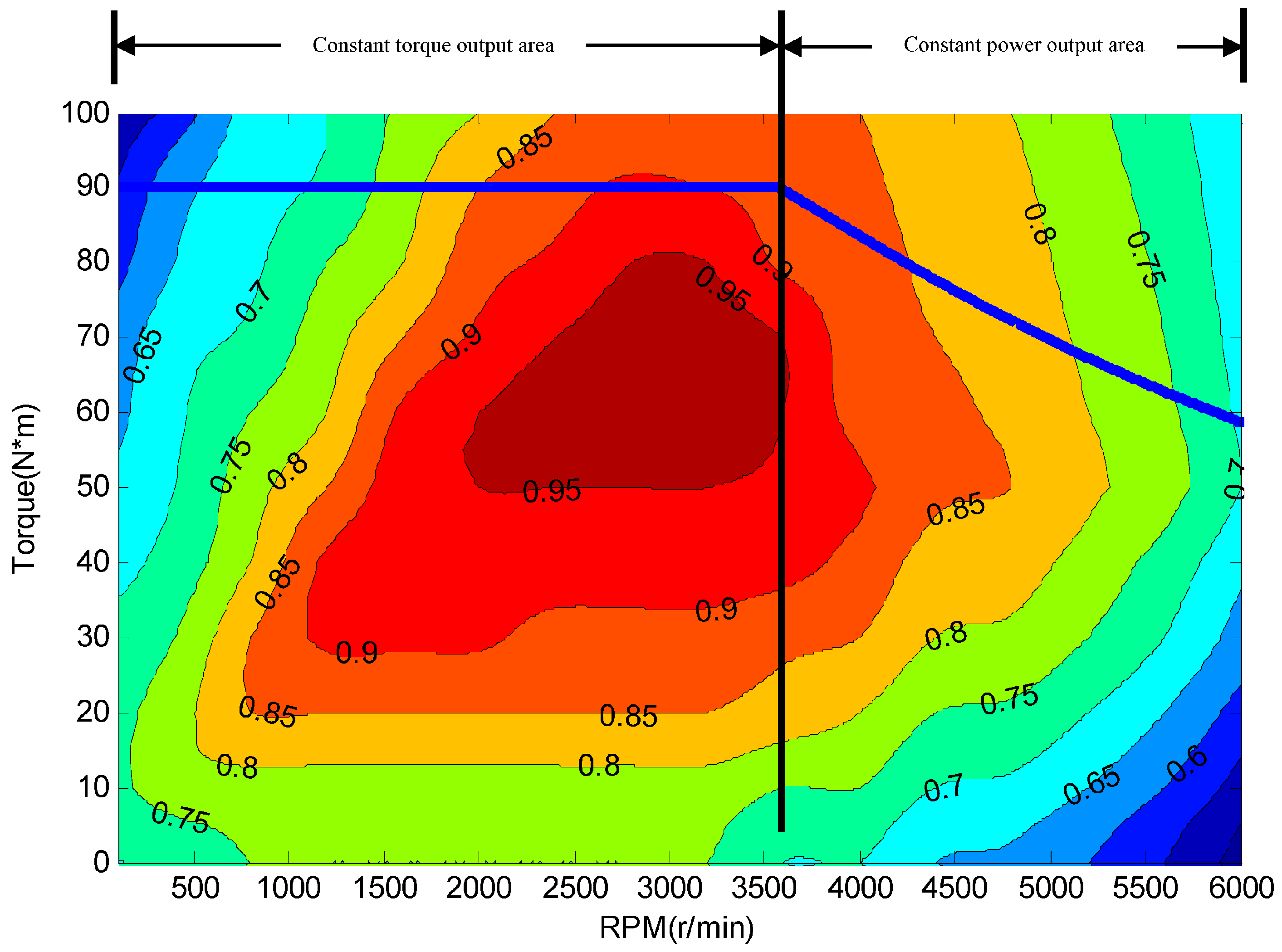
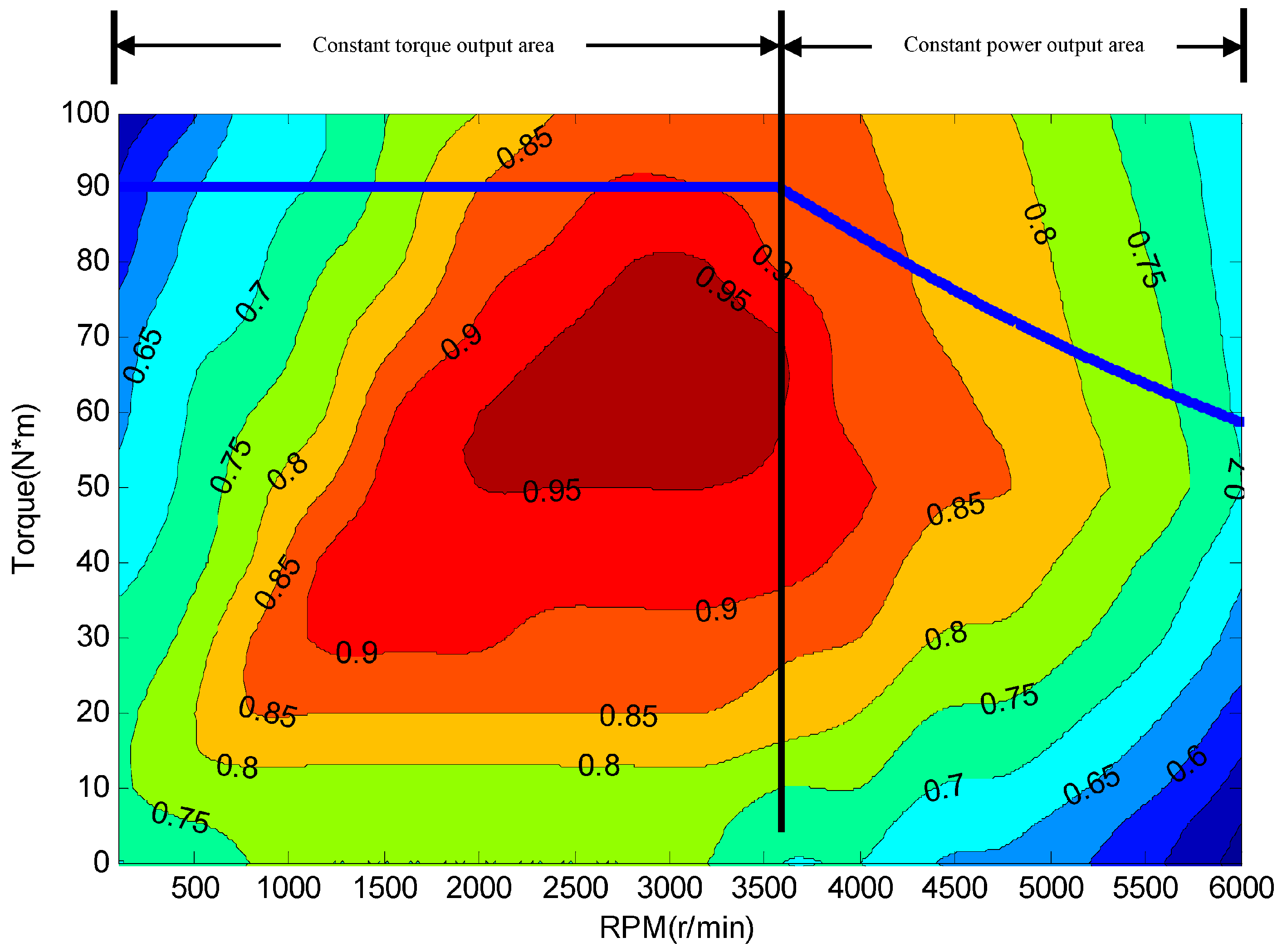
- When a vehicle is running at high speed and the driving torque is distributed equally to the four wheels in the most common way, according to Figure 2, for one single motor it must be poorly efficient because of its low torque output. Oppositely, if we use front-wheel-drive (FWD) or rear-wheel-drive (RWD) instead of four-wheel-drive (4WD), then the motor torque output will increase about twice the original. That means the motor works more efficiently.
- (2)
- When a vehicle starts accelerating with high torque, the driving torque is only distributed to the front or rear wheels, which is also a very low efficiency allocation way. According to Figure 2, in this case, 4WD is an obviously better pattern.
- (1)
- The slip ratio and rotational speed difference of each wheel is quite small.
- (2)
- The torque output is identical if the motors are on the same axle.
3.1.2. Solutions to Objective Functions
- (1)
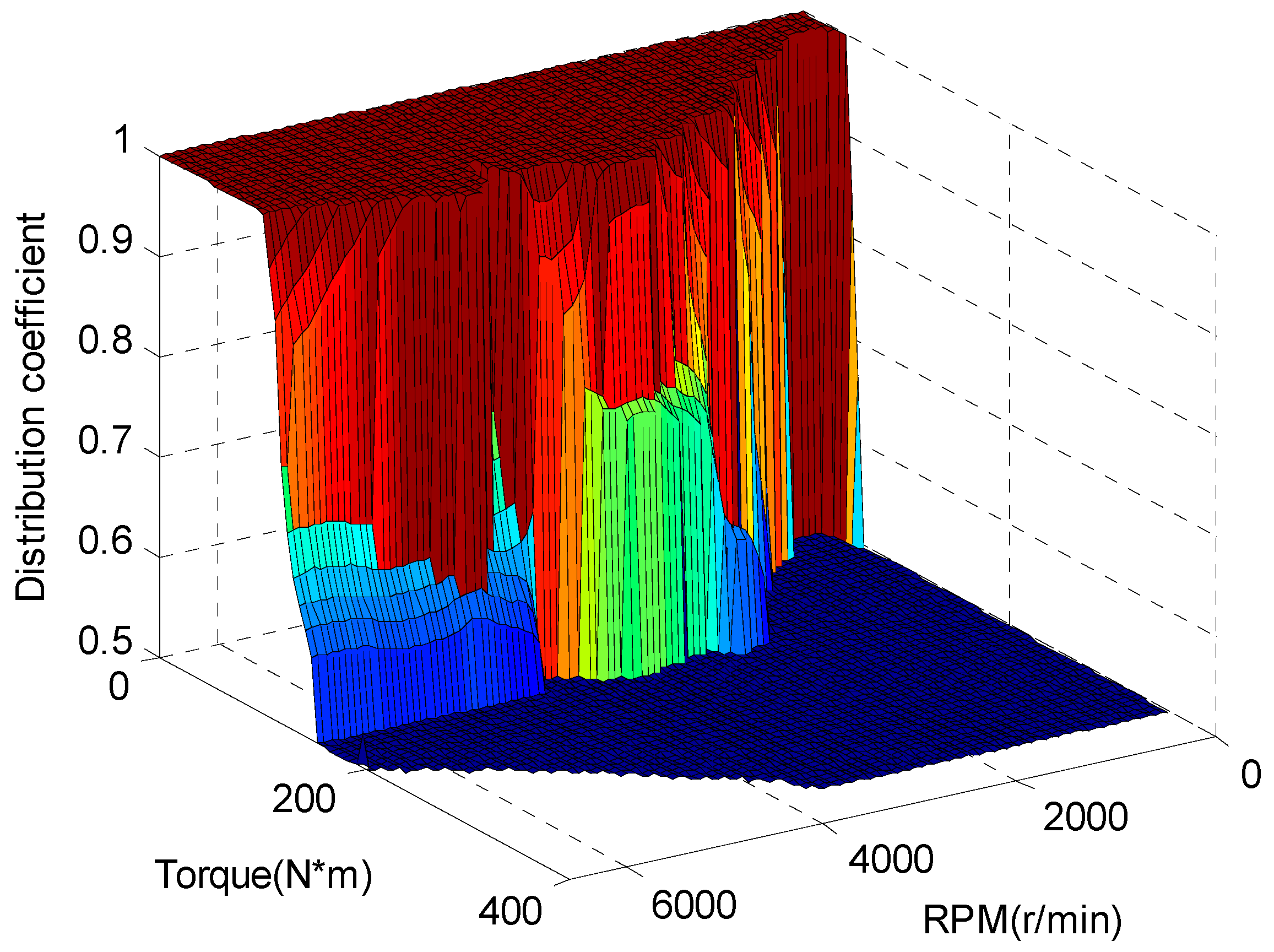
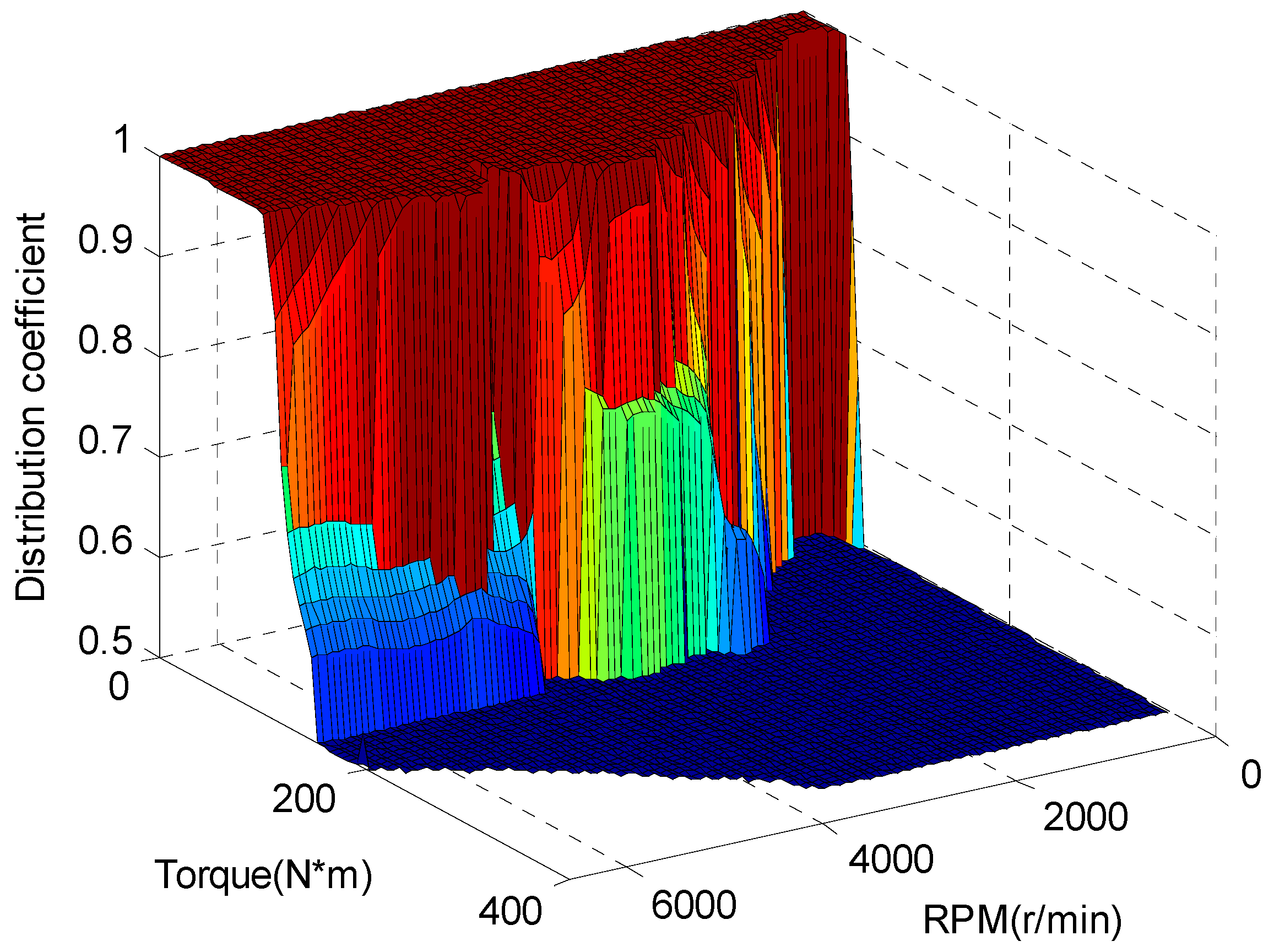
- On different working conditions, in order to achieve the high efficiency performance, different distribution coefficients are demanded;
- (2)
- In the low torque region, all the distribution coefficients equal 1, which shows that the FWD is applied as a better pattern when the torque demand is relatively small;
- (3)
- In medium and high torque region, the distribution coefficients are 0.5 or slightly greater than 0.5, which shows that 4WD can achieve higher efficiency;
- (4)
- In the low speed region, there is almost no transitional area between the regions of distribution coefficient of 0.5 and 1. That is because the isoefficiency curves are very dense in this area, which will lead to the sudden change in distribution coefficient map.
3.2. Stability Control
3.2.1. Optimal Slip Ratio
3.2.2. Road Friction Coefficient Estimation
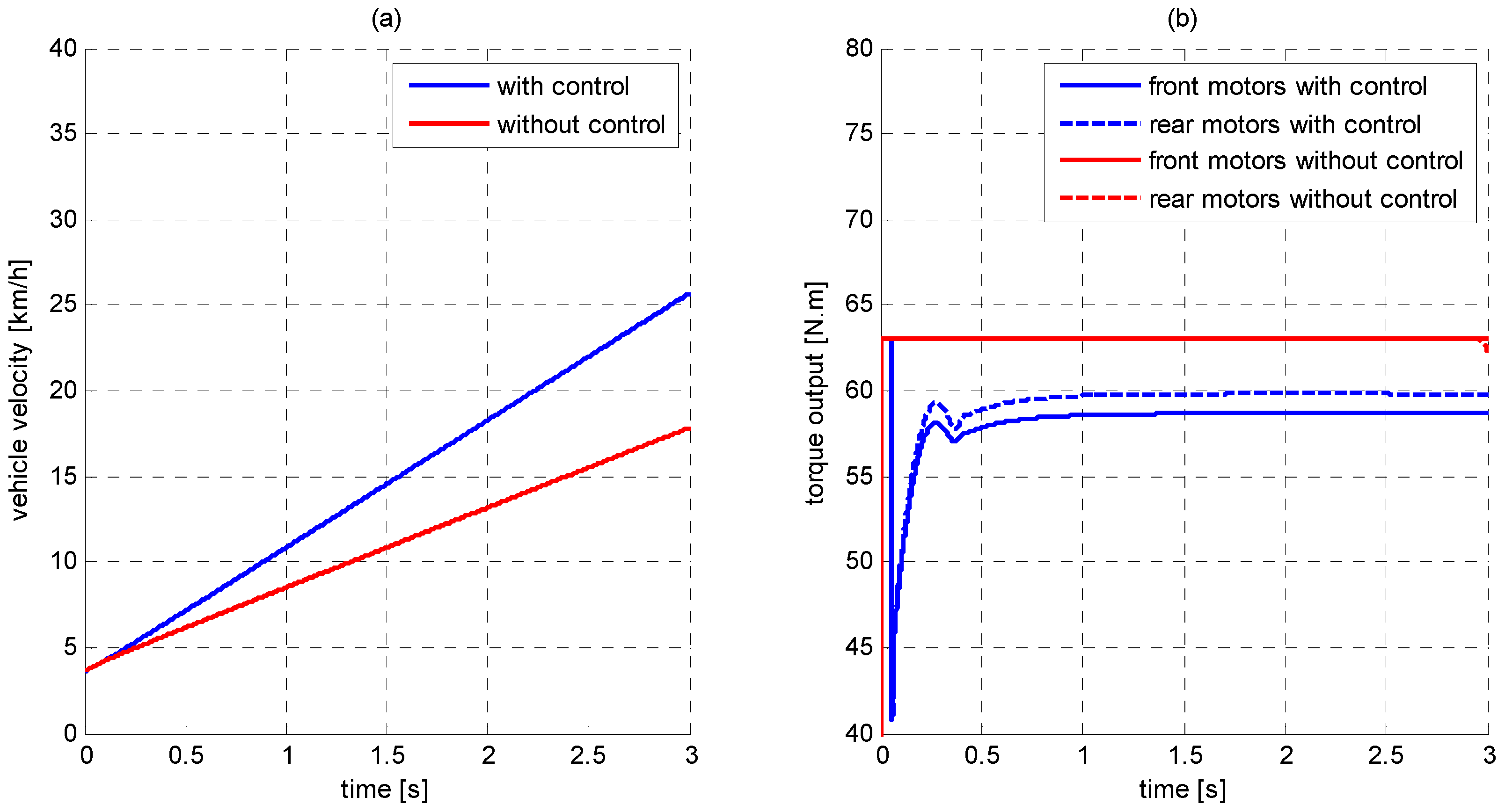
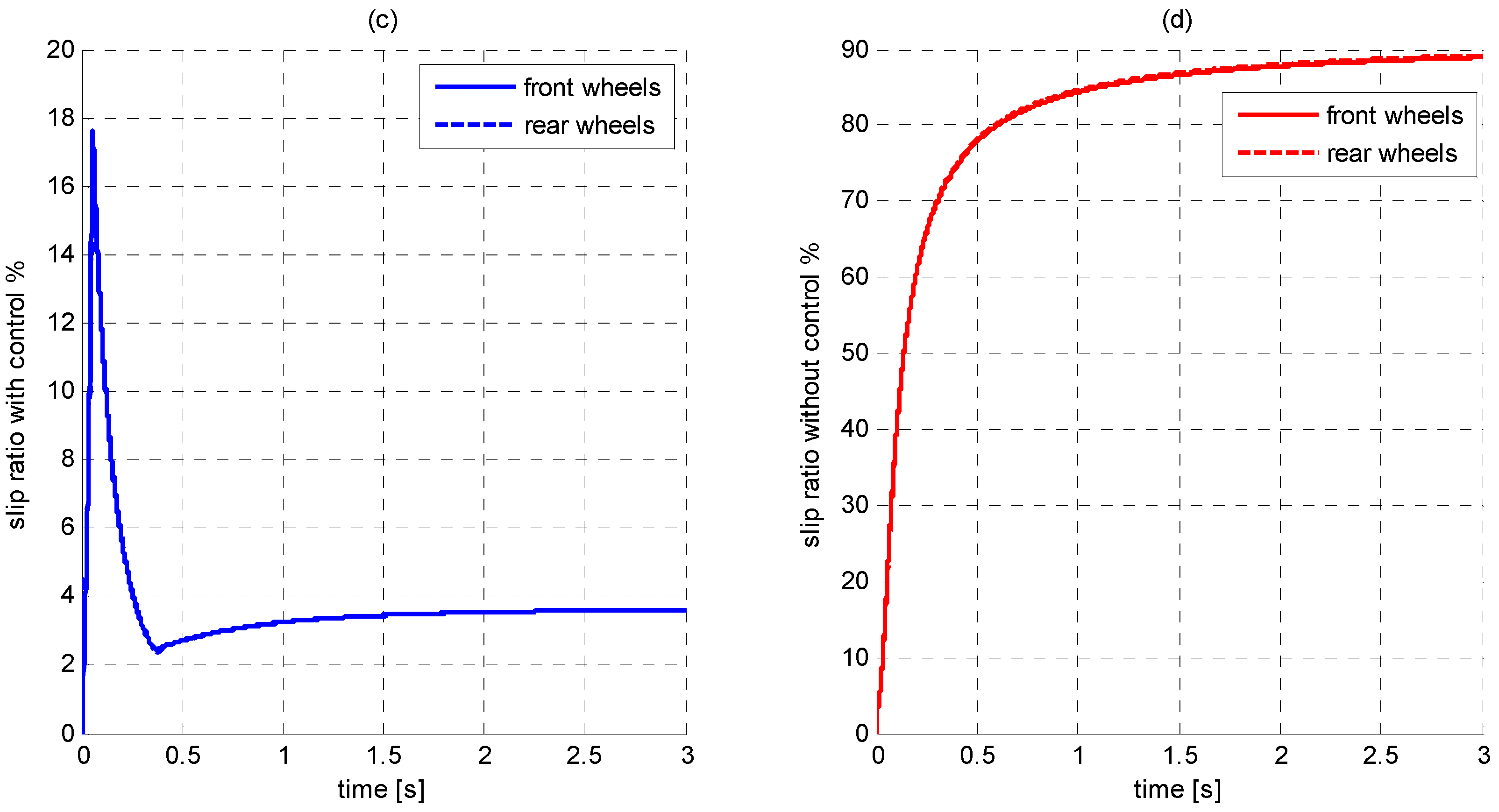
3.2.3. Optimal Slip Ratio Control
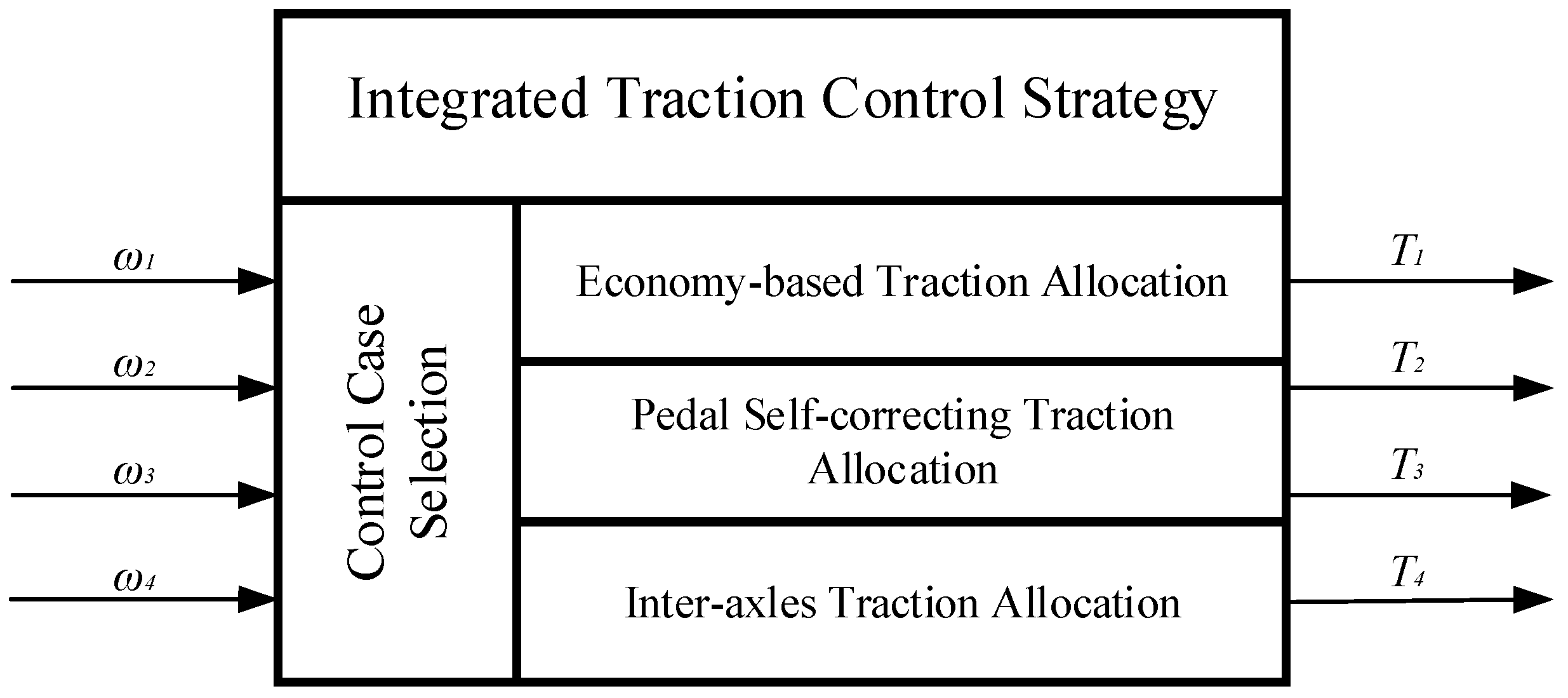
3.3. Integrated Control Strategy
4. Simulation Results and Analysis
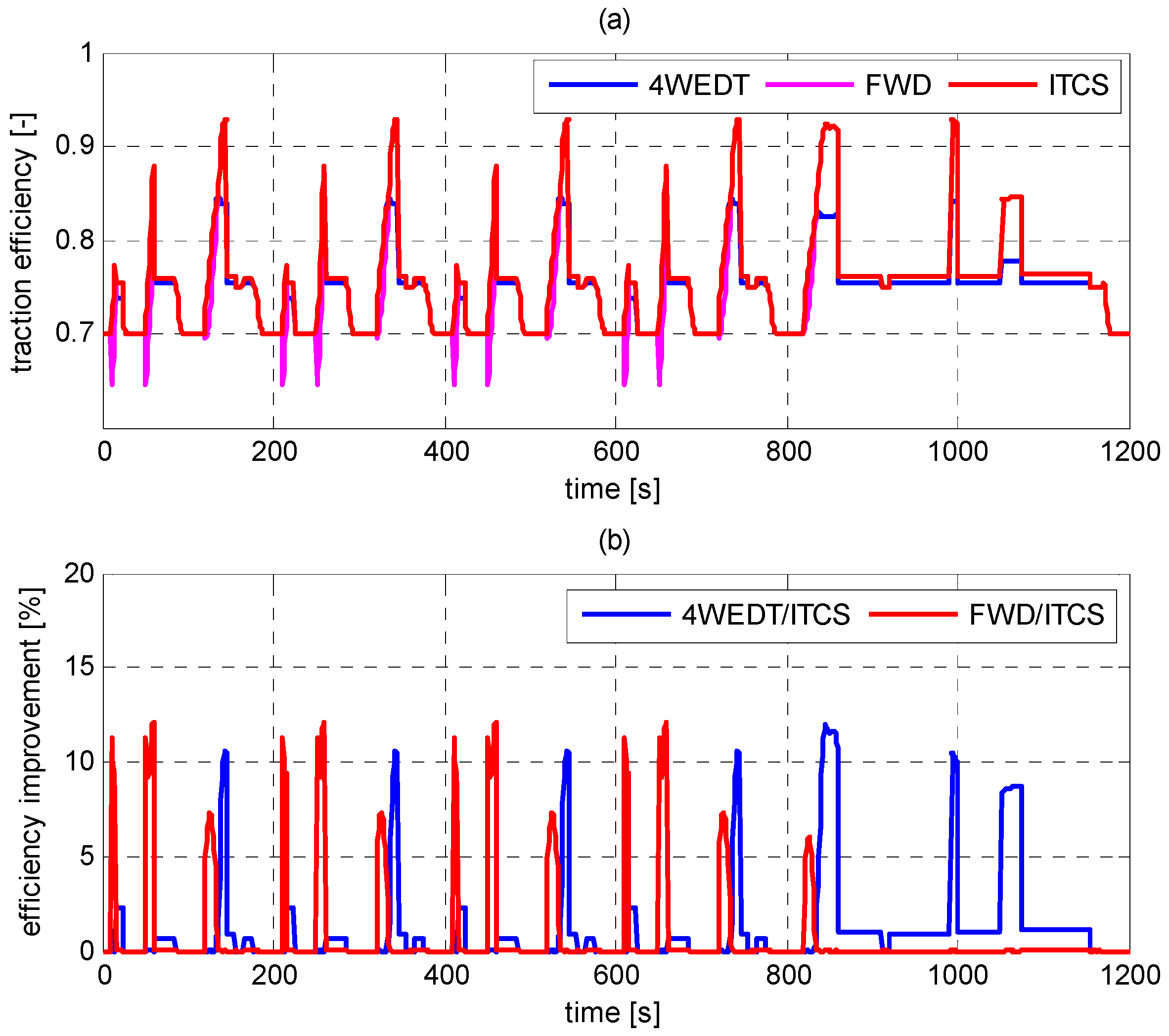
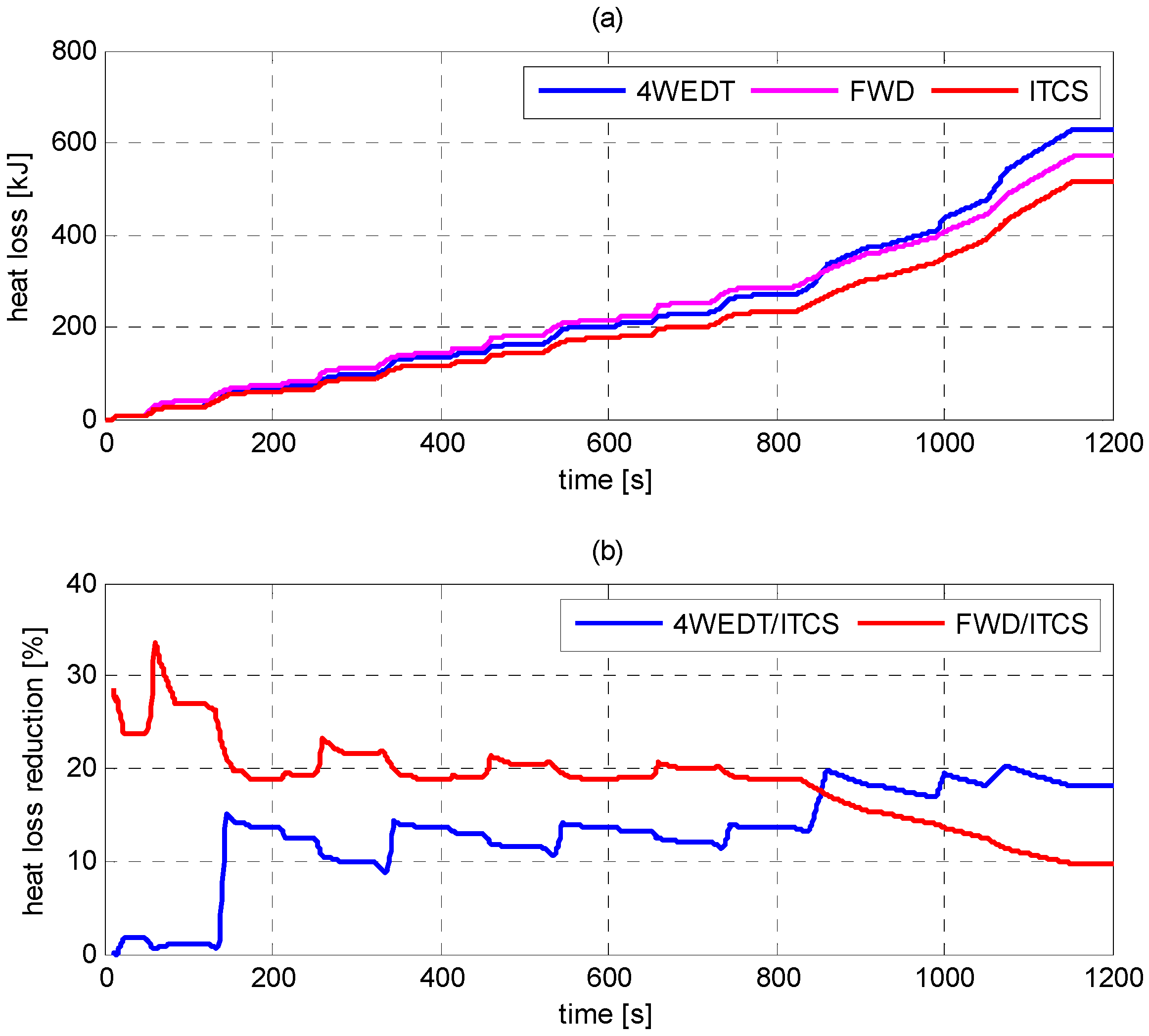
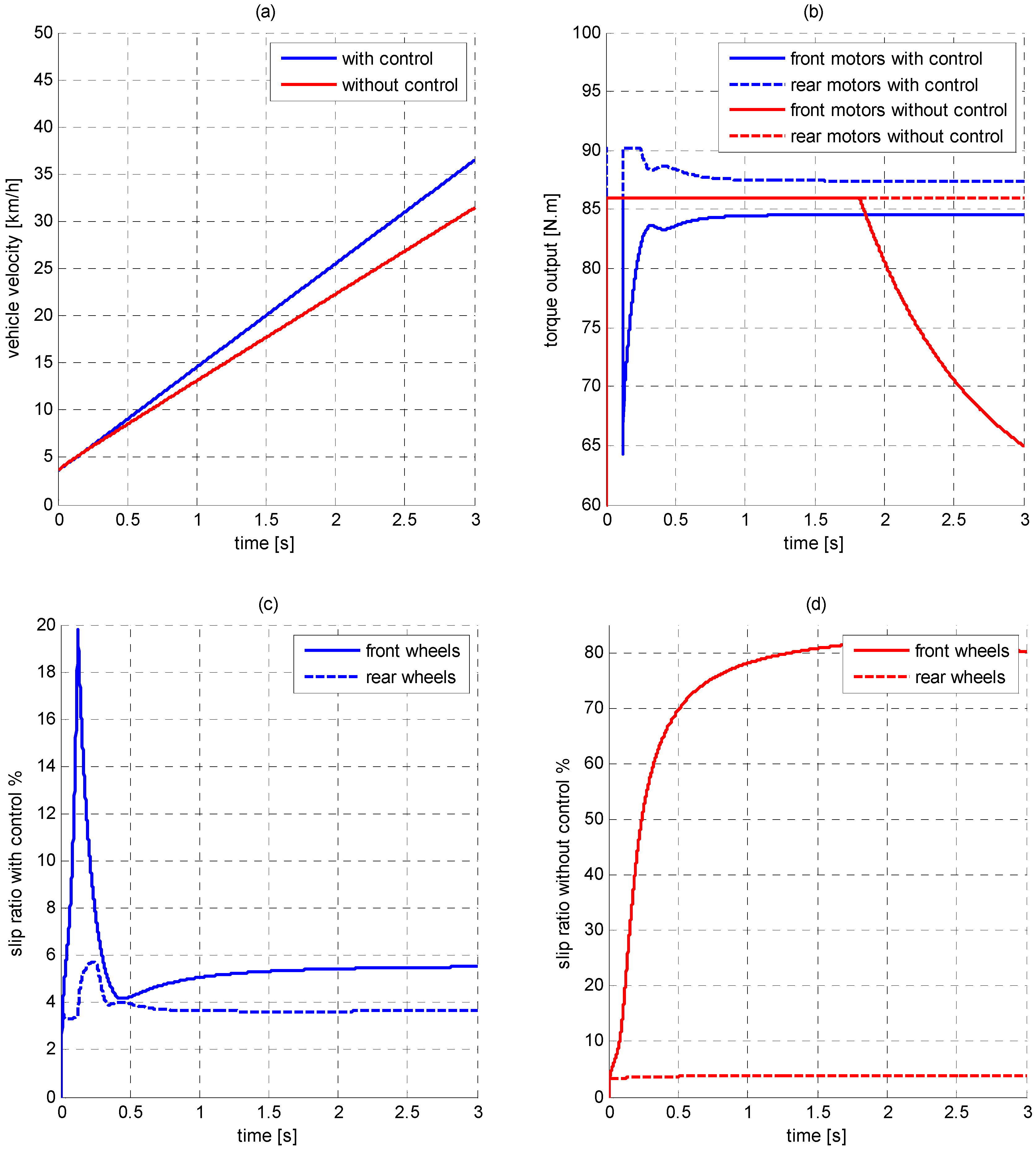
4.1. Simulation on Case 1: Economy-Based Traction Allocation
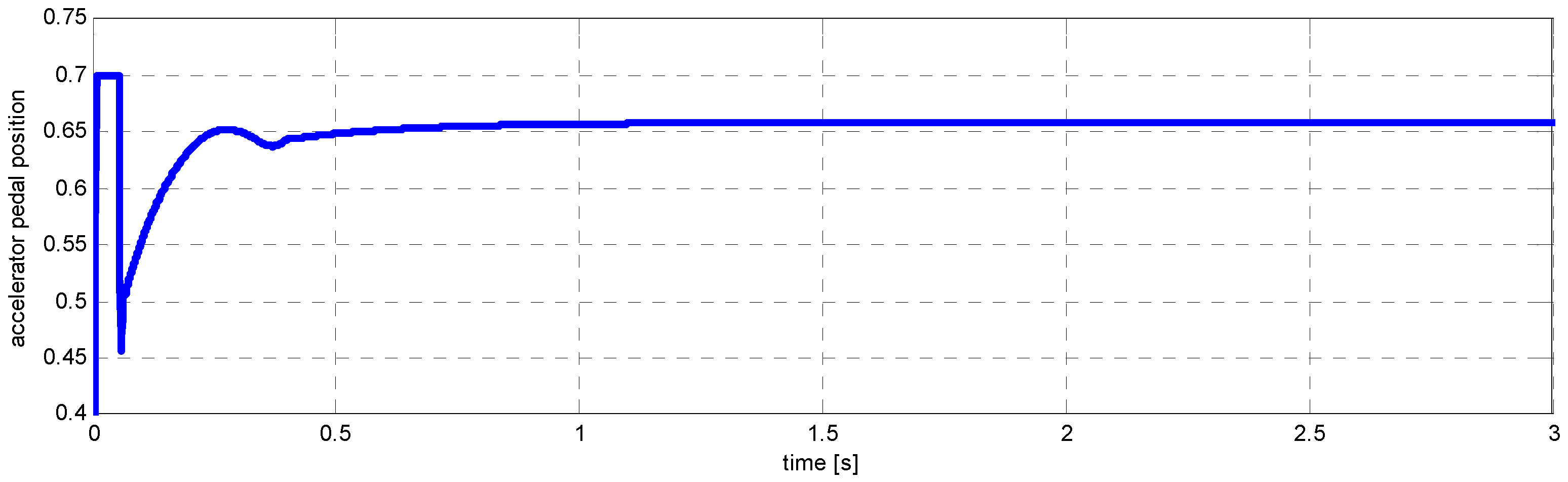
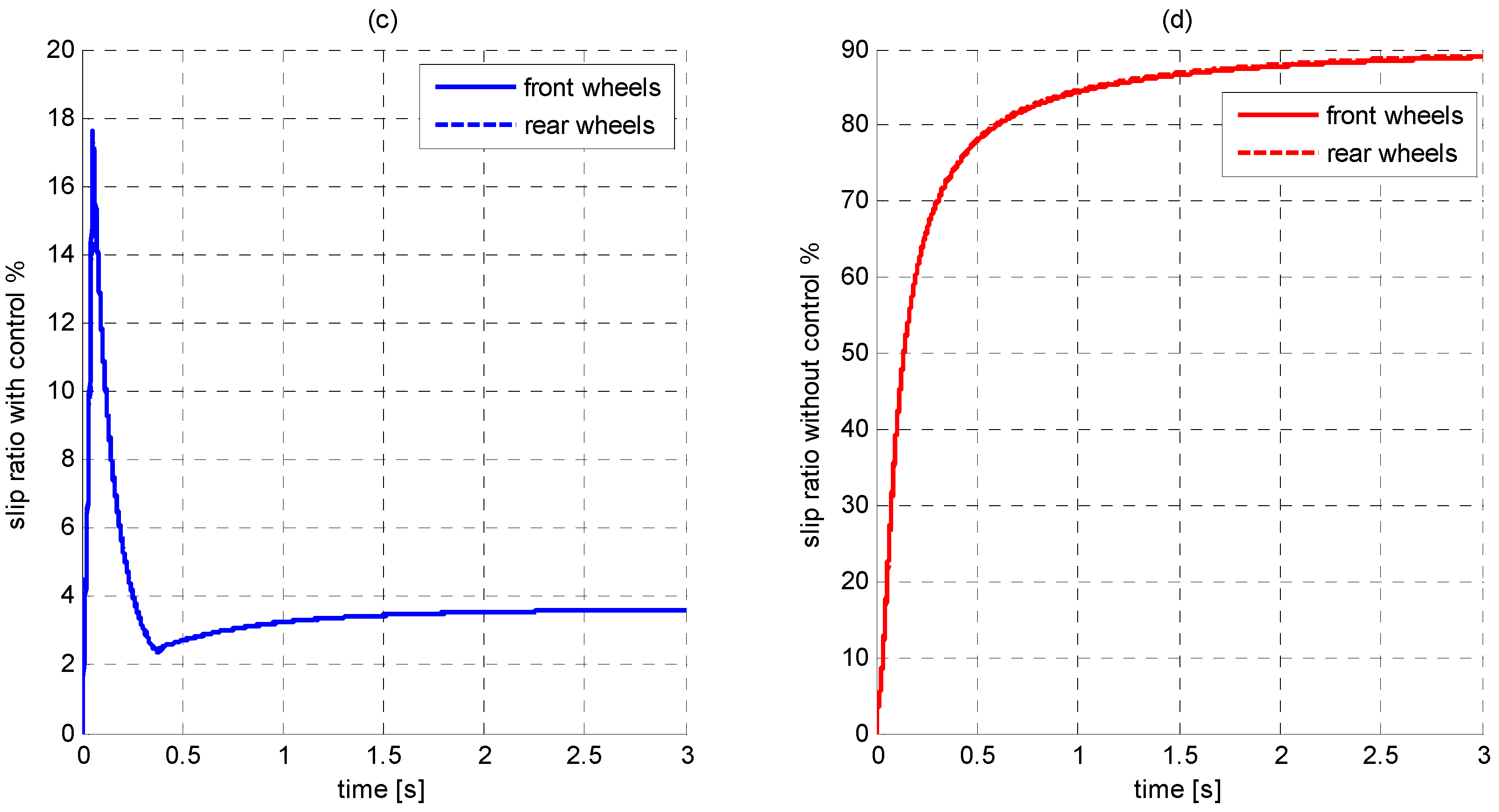
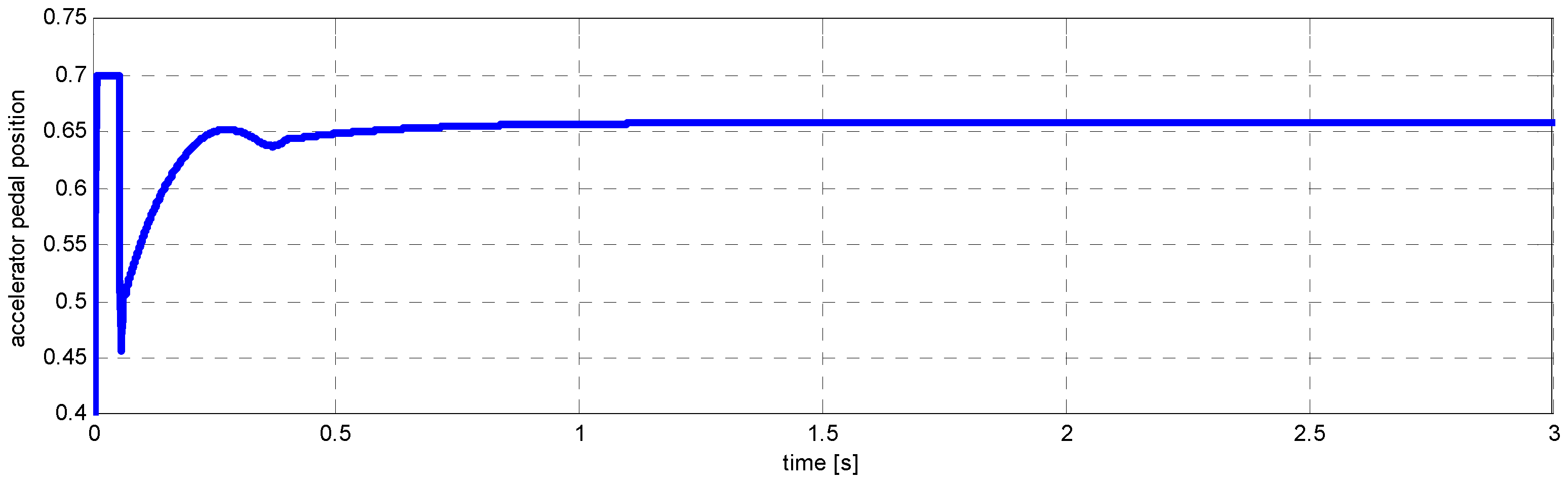
4.2. Simulation on Case 2: Pedal Self-Correcting Traction Allocation
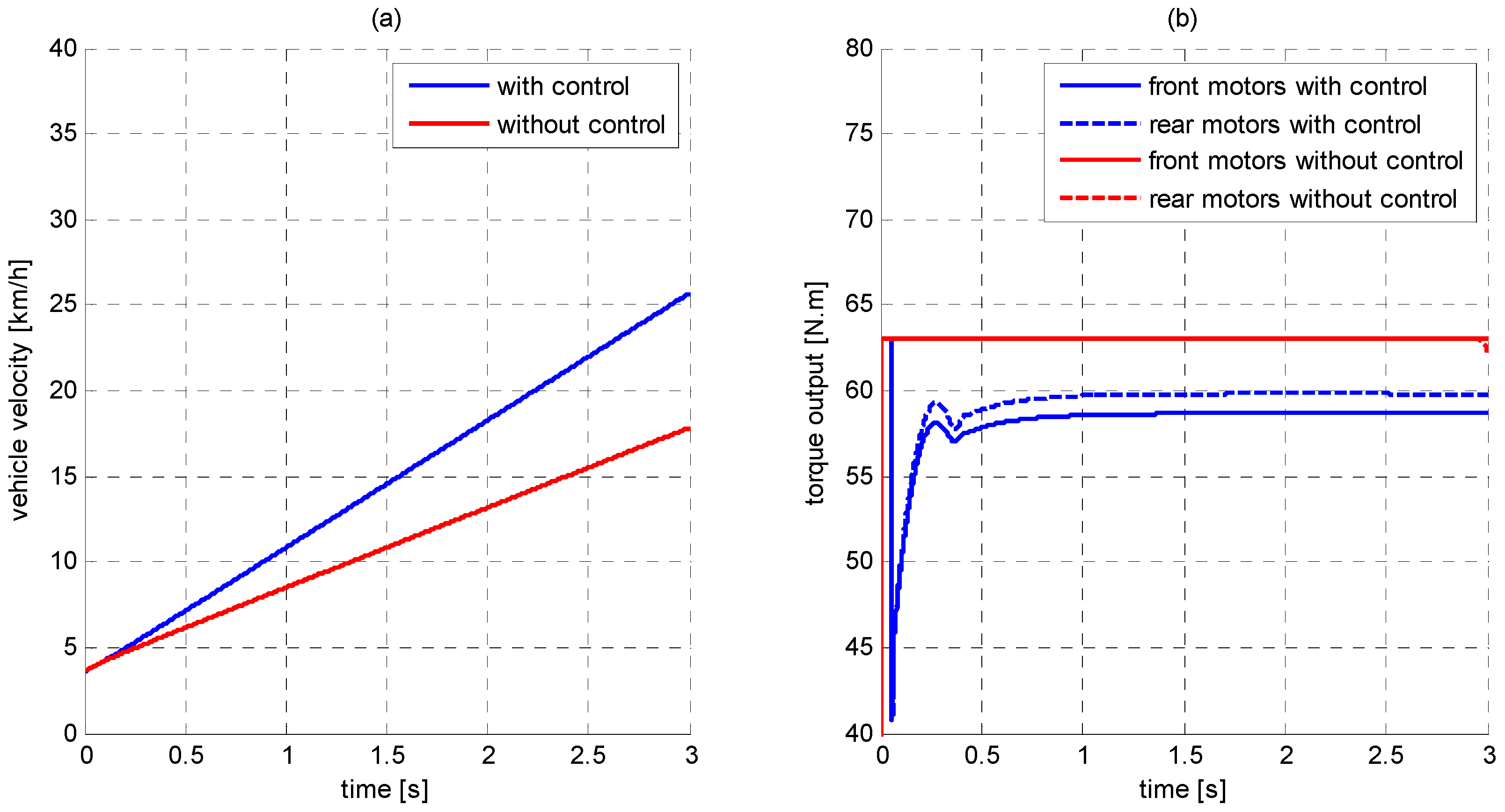
4.3. Simulation on Case 3: Inter-Axles Traction Allocation
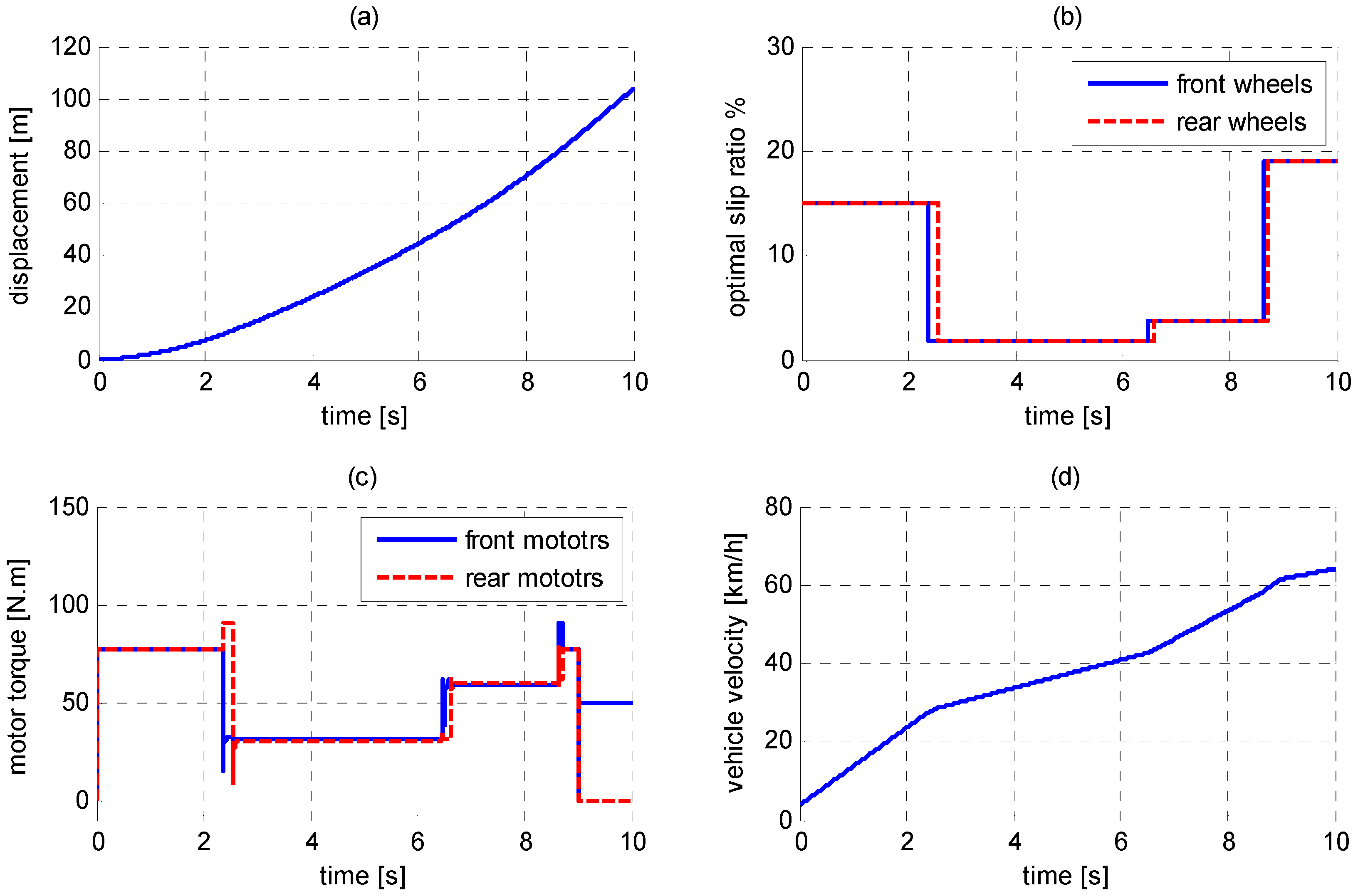
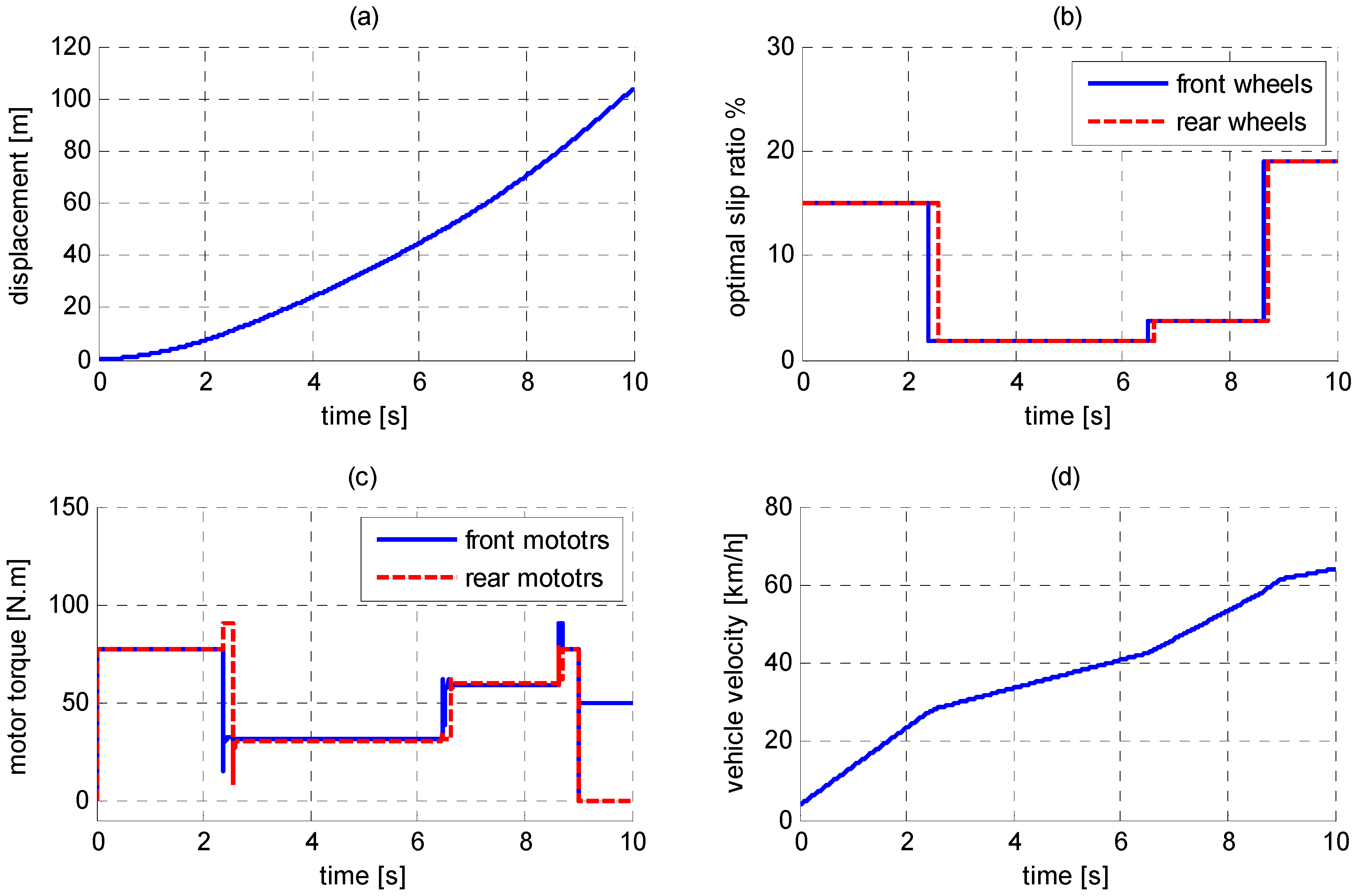
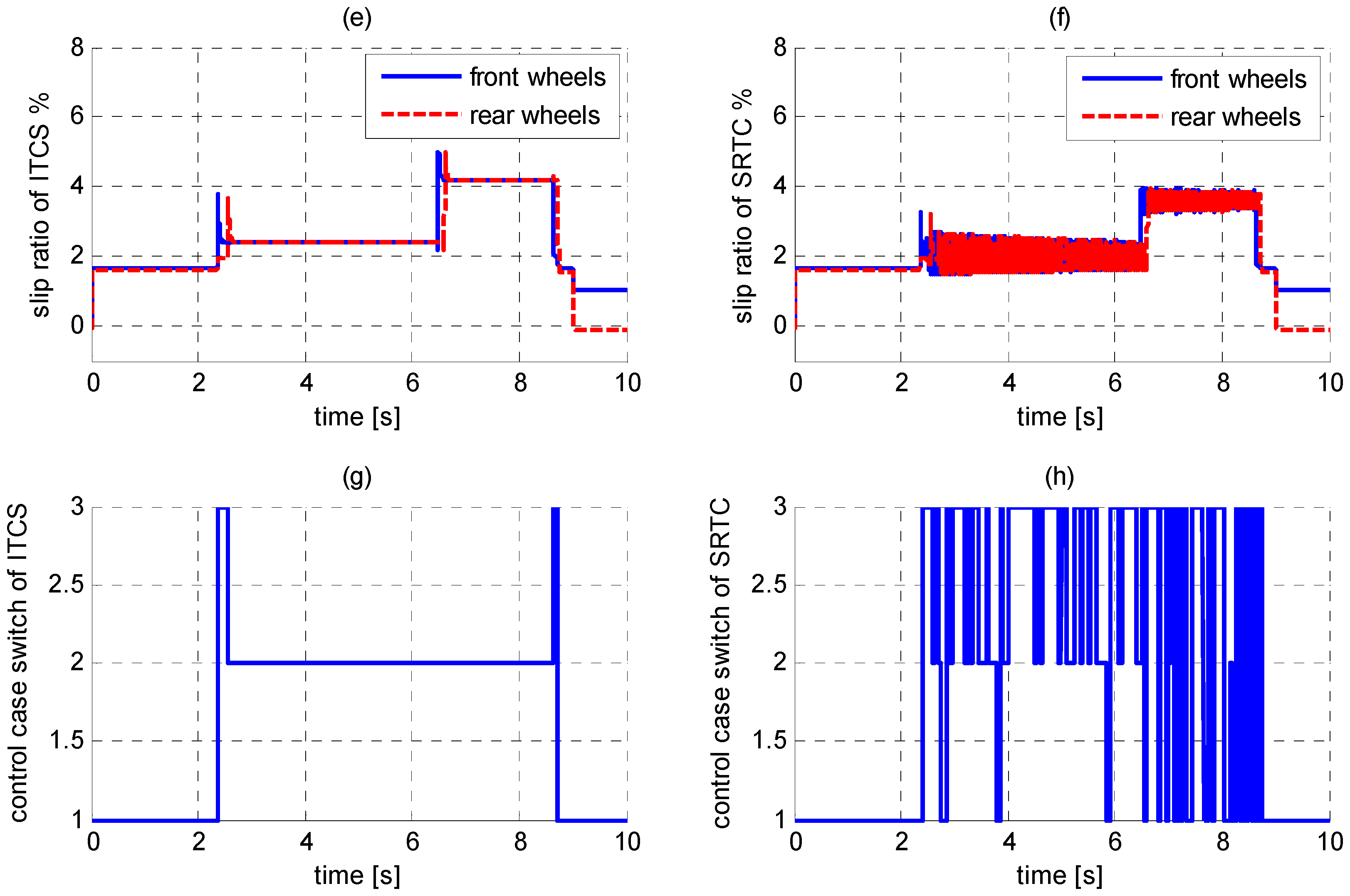
4.4. Simulation and Analysis on Variable Conditions
5. Conclusions
- (1)
- When vehicle lateral motion is taken into account, the ITCS needs a good combination of the other stability control systems, such as electronic stability control (ESC).
- (2)
- Since the proposed method is only analyzed theoretically and validated via simulation, an actual bench or field test is needed in the future to verify the proposed control strategy.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hori, Y.; Toyoda, Y.; Tsuruoka, Y. Traction control of electric vehicle: Basic experimental results using the test EV “UOT Electric March”. IEEE Trans. Ind. Appl. 1998, 34, 1131–1138. [Google Scholar] [CrossRef]
- Esmailzadeh, E.; Vossoughi, G.R.; Goodarzi, A. Dynamic modelling and analysis of a four motorized wheels electric vehicle. Int. J. Veh. Syst. Dyn. 2001, 35, 163–194. [Google Scholar] [CrossRef]
- Fujii, K.; Fujimoto, H. Traction control based on slip ratio estimation without detecting vehicle speed for electric vehicle. In Proceedings of the Fourth Power Conversion Conference-Nagoya 2007, Nagoya, Japan, 2–5 April 2007; pp. 688–693.
- Hori, Y. Future vehicle driven by electricity and control-research on four-wheel-motored “UOT Electric March II”. IEEE Trans. Ind. Electron. 2004, 51, 954–962. [Google Scholar] [CrossRef]
- Khatun, P.; Bingham, C.M.; Mellor, P.H. Comparison of Control Methods for Electric Vehicle Antilock Braking/Traction Control Systems; SAE Technical Paper No. 2001-01-0596; SAE International: Warrendale, PA, USA, 2001. [Google Scholar]
- Ratiroch-Anant, P.; Hirata, H.; Anabuki, M.; Ouchi, S. Adaptive controller design for anti-slip system of EV. In Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 1–3 June 2006; pp. 1–6.
- Deur, J.; Pavković, D.; Burgio, G.; Hrovat, D. A model-based traction control strategy non-reliant on wheel slip information. Int. J. Veh. Syst. Dyn. 2011, 49, 1245–1265. [Google Scholar] [CrossRef]
- Bottiglione, F.; Sorniotti, A.; Shead, L. The effect of half-shaft torsion dynamics on the performance of a traction control system for electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1145–1159. [Google Scholar] [CrossRef] [Green Version]
- Leiber, H.; Czinczel, A. Four Years of Experience with 4-Wheel Antiskid Brake Systems (ABS); SAE Technical Paper No. 830481; SAE International: Warrendale, PA, USA, 1983. [Google Scholar]
- Zhao, Z. Research on Vehicle Dynamics, Its Nonlinear Control Strategies and Related Technologies. Ph.D. Thesis, Northwestern Polytechnical University, Xi’an, China, 2002. [Google Scholar]
- Khatun, P.; Bingham, C.M.; Schofield, N.; Mellor, P.H. Application of fuzzy control algorithms for electric vehicle antilock braking/traction control systems. IEEE Trans. Veh. Technol. 2003, 52, 1356–1364. [Google Scholar] [CrossRef] [Green Version]
- Yin, D.; Oh, S.; Hori, Y. A novel traction control for EV based on maximum transmissible torque estimation. IEEE Trans. Ind. Electron. 2009, 56, 2086–2094. [Google Scholar]
- Sakai, S.I.; Sado, H.; Hori, Y. Anti-skid control with motor in electric vehicle. In Proceedings of the 6th International Workshop on Advanced Motion Control, Nagoya, Japan, 30 March–1 April 2000; pp. 317–322.
- Amodeo, M.; Ferrara, A.; Terzaghi, R.; Vecchio, C. Wheel slip control via second-order sliding-mode generation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 122–131. [Google Scholar] [CrossRef]
- Cho, K.; Kim, J.; Choi, S. The integrated vehicle longitudinal control system for ABS and TCS. In Proceedings of the IEEE International Conference on Control Applications (CCA), Dubrovnik, Croatia, 3–5 October 2012.
- Tanelli, M.; Ferrara, A. Wheel slip control of road vehicles via switched second order sliding modes. Int. J. Veh. Des. 2013, 62, 231–253. [Google Scholar] [CrossRef]
- Drakunov, S.; Özgüner, U.; Dix, P.; Ashrafi, B. ABS control using optimum search via sliding modes. IEEE Trans. Control Syst. Technol. 1995, 3, 79–85. [Google Scholar] [CrossRef]
- Unsal, C.; Kachroo, P. Sliding mode measurement feedback control for antilock braking systems. IEEE Trans. Control Syst. Technol. 1999, 7, 271–281. [Google Scholar] [CrossRef]
- He, H.; Peng, J.; Xiong, R.; Fan, H. An acceleration slip regulation strategy for four-wheel drive electric vehicles based on sliding mode control. Energies 2014, 7, 3748–3763. [Google Scholar] [CrossRef]
- Nam, K.; Hori, Y.; Lee, C. Wheel Slip Control for Improving Traction-Ability and Energy Efficiency of a Personal Electric Vehicle. Energies 2015, 8, 6820–6840. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, J. Torque distribution strategy for a front-and rear-wheel-driven electric vehicle. IEEE Trans. Veh. Technol. 2012, 61, 3365–3374. [Google Scholar] [CrossRef]
- Mokhiamar, O.; Abe, M. Active wheel steering and yaw moment control combination to maximize stability as well as vehicle responsiveness during quick lane change for active vehicle handling safety. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 115–124. [Google Scholar] [CrossRef]
- Mokhiamar, O.; Abe, M. How the four wheels should share forces in an optimum cooperative chassis control. Control Eng. Pract. 2006, 14, 295–304. [Google Scholar] [CrossRef]
- He, P.; Hori, Y. Improvement of EV maneuverability and safety by disturbance observer based dynamic force distribution. In Proceedings of the EVS22 International Electric Vehicle Symposium and Exhibition, Yokohama, Japan, 23–28 October 2006.
- Nishihara, O.; Kumamoto, H. Minimax optimizations of tire workload exploiting complementarities between independent steering and traction/braking force distributions. In Proceedings of the AVEC ’06, International Symposium on Advanced Vehicle Control, Taipei, Taiwan, 20–24 August 2006; pp. 713–718.
- Yamakawa, J.; Watanabe, K. A method of optimal wheel torque determination for independent wheel drive vehicles. J. Terramechanics 2006, 43, 269–285. [Google Scholar] [CrossRef]
- Zareian, A.; Azadi, S.; Kazemi, R. Estimation of road friction coefficient using extended Kalman filter, recursive least square, and neural network. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2016, 230, 52–68. [Google Scholar] [CrossRef]
- Guan, H.; Wang, B.; Lu, P.; Xu, L. Identification of maximum road friction coefficient and optimal slip ratio based on road type recognition. Chin. J. Mech. Eng. 2014, 27, 1018–1026. [Google Scholar] [CrossRef]
- Zimmermann, M. Loss Calculation of an Electric Drive Train Using a Standard Driving Cycle. Master’s Thesis, Technical University of Berlin, Berlin, Germany, 2013. [Google Scholar]
- Zhang, X.; Göhlich, D.; Wu, X.L. Optimal torque distribution strategy for a four motorized wheels electric vehicle. In Proceedings of the EVS28 International Electric Vehicle Symposium and Exhibition, Goyang, Korea, 3–6 May 2015.
- Ray, L.R. Real time determination of road coefficient of friction for IVHS and advanced vehicle control. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 2133–2137.
- Wenzel, T.A.; Burnham, K.J.; Blundell, M.V.; Williams, R.A. Dual extended Kalman filter for vehicle state and parameter estimation. Int. J. Veh. Syst. Dyn. 2006, 44, 153–171. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Level | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Friction coefficient | 1 | 0.9 | 0.8 | 0.7 | 0.6 | 0.5 | 0.4 | 0.3 | 0.2 | 0.1 |
| Optimal slip ratio % | 19 | 17 | 15 | 13.2 | 11.3 | 9.4 | 7.6 | 5.6 | 3.7 | 1.9 |
| Parameters | Values | Unit |
|---|---|---|
| Vehicle mass | 1280 | kg |
| Vehicle inertia about Z axis | 2460 | kg·m2 |
| Distance of center of gravity (c.g.) from front axle | 1.2 | m |
| Distance of c.g. from rear axle | 1.3 | m |
| Frontal projected area | 2.1 | m2 |
| Wheels track | 1.5 | m |
| air resistance coefficient | 0.32 | - |
| Reducer ratio | 3.5 | - |
| Reducer efficiency | 0.9 | - |
| Tire radius | 0.3 | m |
| Height of the sprung mass c.g. | 0.5 | m |
| Wheel rotational inertia | 2.2 | kg·m2 |
| Cycle Stage | Energy Consumption (kJ) | Energy Saving | Equivalent Weight Reduction (kg) | ||
|---|---|---|---|---|---|
| Traditional Allocation | ITCS | ||||
| Low Speed | 4WETD | 1406.36 | 1373.35 | 2.347% | 30.91 kg |
| FWD | 1431.29 | 4.048% | 53.04 kg | ||
| High Speed | 4WETD | 1658.66 | 1581.82 | 4.632% | 60.69 kg |
| FWD | 1583.95 | 0.134% | 3.8 kg | ||
| Whole Cycle | 4WETD | 3065.02 | 2995.17 | 3.584% | 47.02 kg |
| FWD | 3015.24 | 1.992% | 26.11 kg | ||
| Distance | Unit | Tire/Road Friction Coefficient |
|---|---|---|
| 0–10 | m | 0.8 |
| 10–50 | m | 0.1 |
| 50–80 | m | 0.2 |
| 80–end | m | 0.9 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Göhlich, D. Integrated Traction Control Strategy for Distributed Drive Electric Vehicles with Improvement of Economy and Longitudinal Driving Stability. Energies 2017, 10, 126. https://doi.org/10.3390/en10010126
Zhang X, Göhlich D. Integrated Traction Control Strategy for Distributed Drive Electric Vehicles with Improvement of Economy and Longitudinal Driving Stability. Energies. 2017; 10(1):126. https://doi.org/10.3390/en10010126
Chicago/Turabian StyleZhang, Xudong, and Dietmar Göhlich. 2017. "Integrated Traction Control Strategy for Distributed Drive Electric Vehicles with Improvement of Economy and Longitudinal Driving Stability" Energies 10, no. 1: 126. https://doi.org/10.3390/en10010126