
An Adaptive Moving Target Imaging Method for Bistatic Forward-Looking SAR Using Keystone Transform and Optimization NLCS


Abstract
:1. Introduction
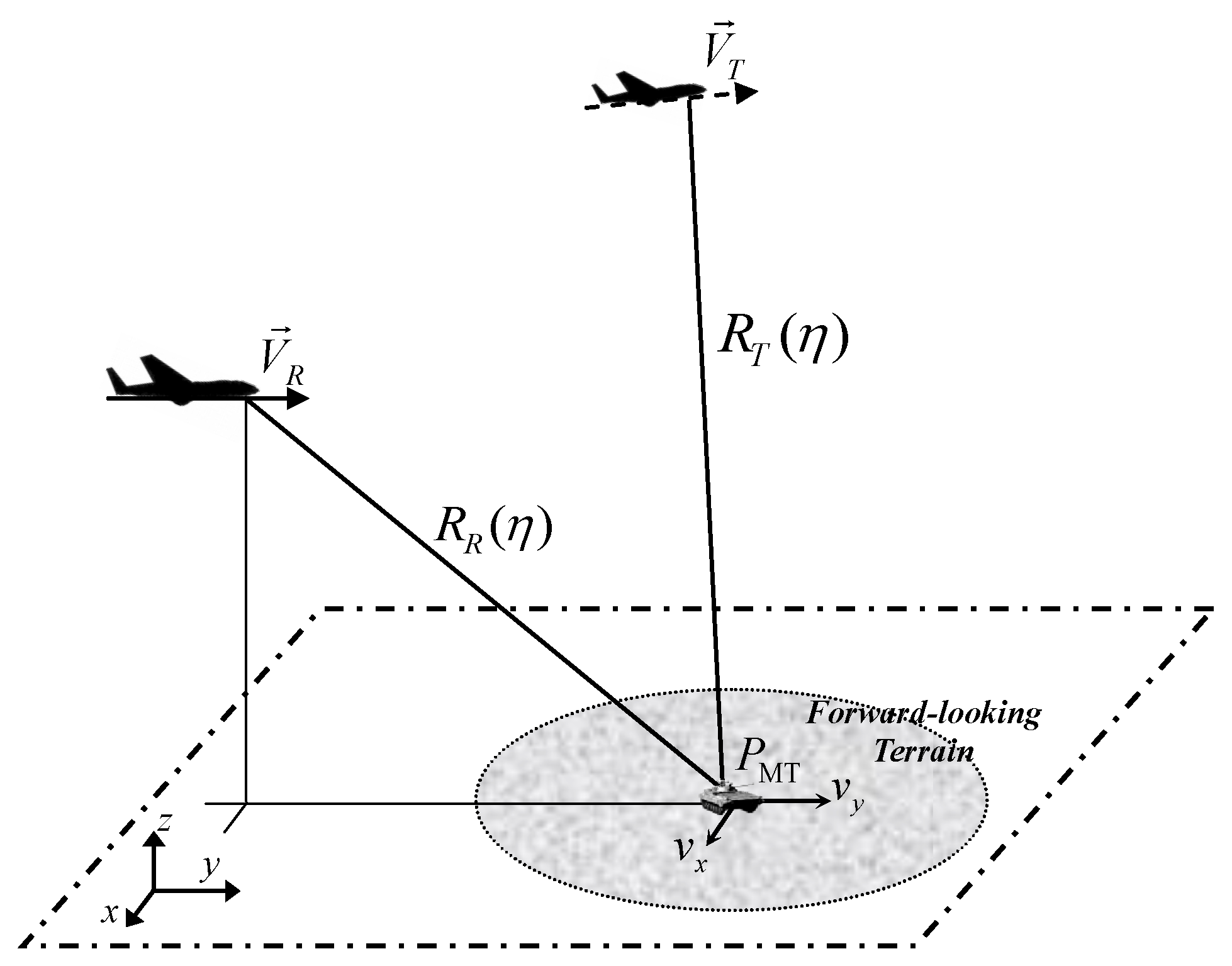
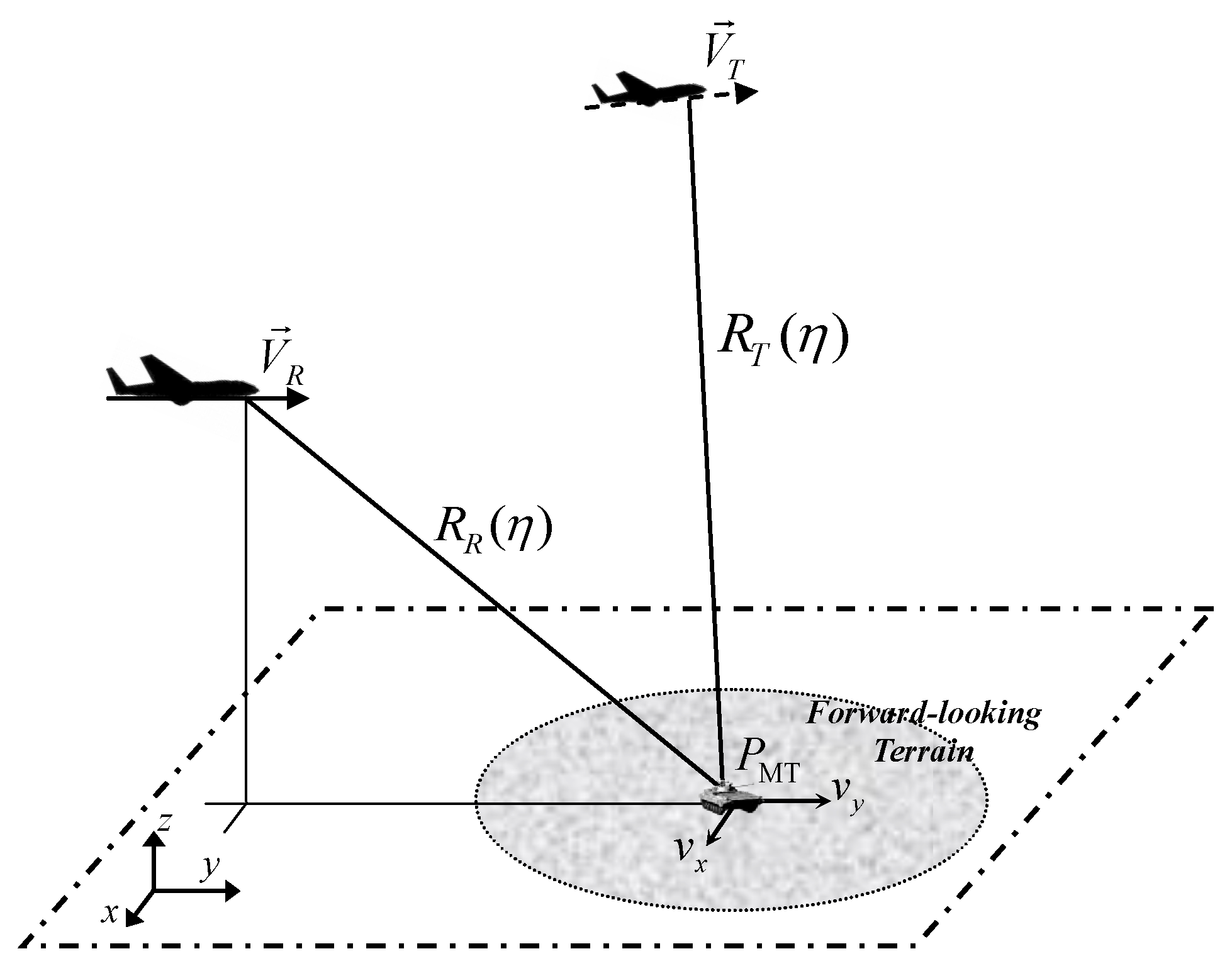
2. Signal Model
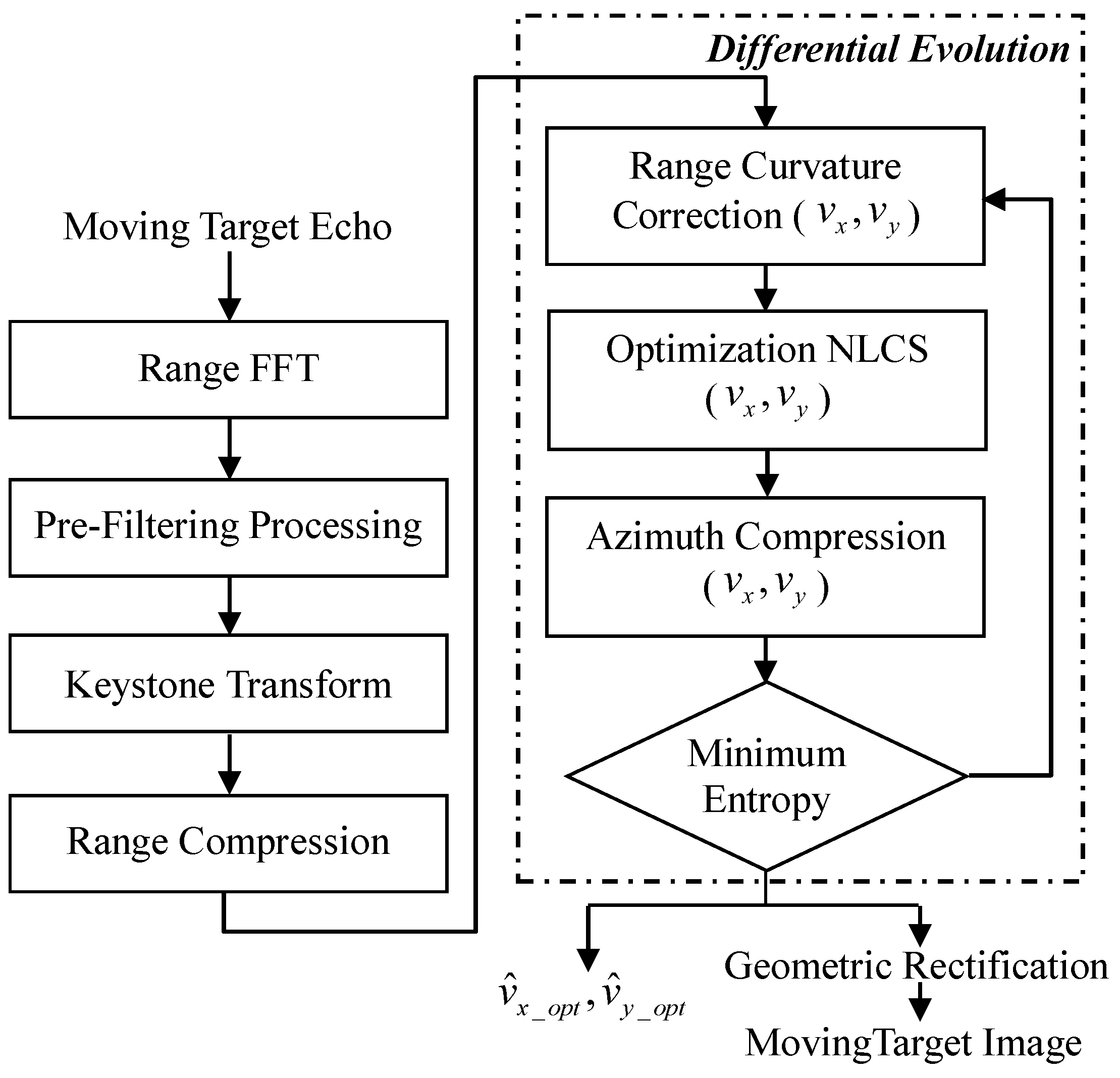
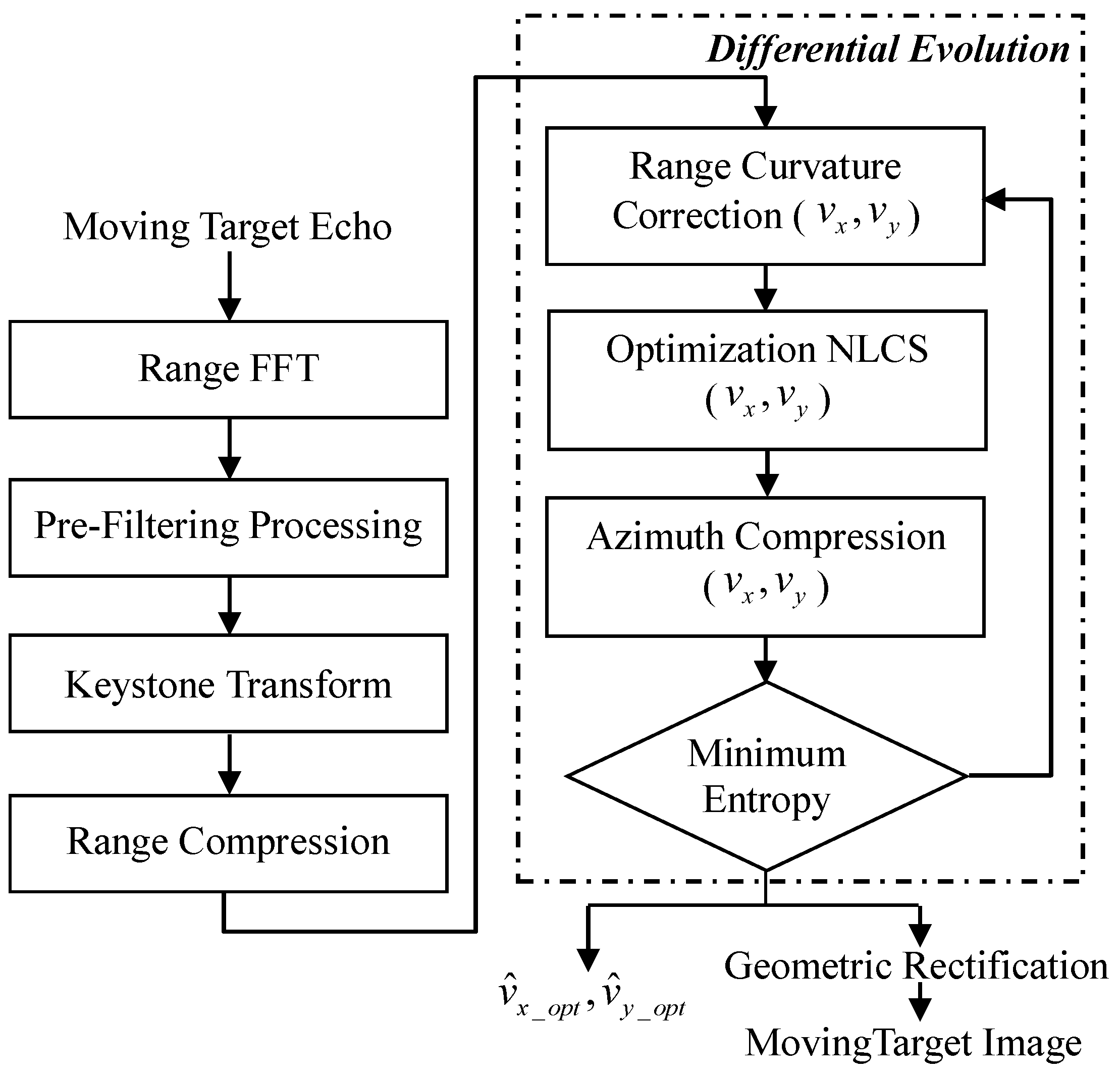
3. Moving Target Imaging Method
3.1. Range Walk Correction
3.2. Range Curvature Correction
3.3. Nonlinear Spatial-Variance Compensation
3.4. Azimuth Compression
3.5. Motion Parameter Estimation
3.5.1. Transforming the Imaging Problem to Be a New Optimization Problem
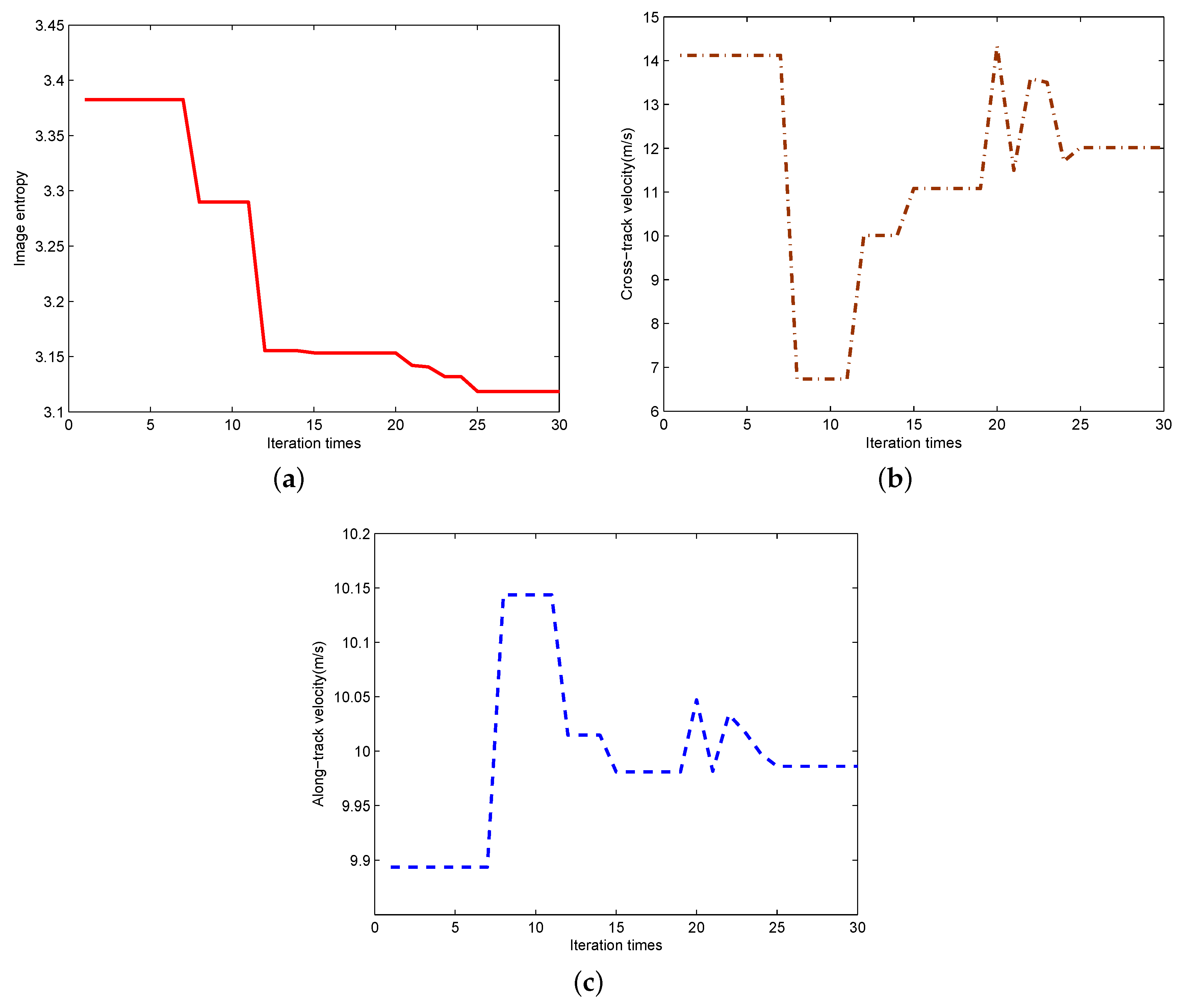
3.5.2. Solving the New Optimization Problem Based on Differential Evolution
- Step 1:
- Initialize the population based on the minimum and maximum bounds,vx,i,0 = vx,min + randij [0, 1] × (vx,max − vx,min)vy,i,0 = vy,min + randij [0, 1] × (vy,max − vy,min)
- Step 2:
- Randomly select three mutually distinct vectors from the population ;
- Step 3:
- Create the donor vector for the ith individual,
- Step 4:
- Generate the trail vector through the following crossover operator,
- Step 5:
- Correct the residual range curvature and compensate the spatial-variant Doppler parameters of the moving target through Equations (26), (30) and (31) using and , separately;
- Step 6:
- Azimuth compression through Equation (37) using and , separately;
- Step 7:
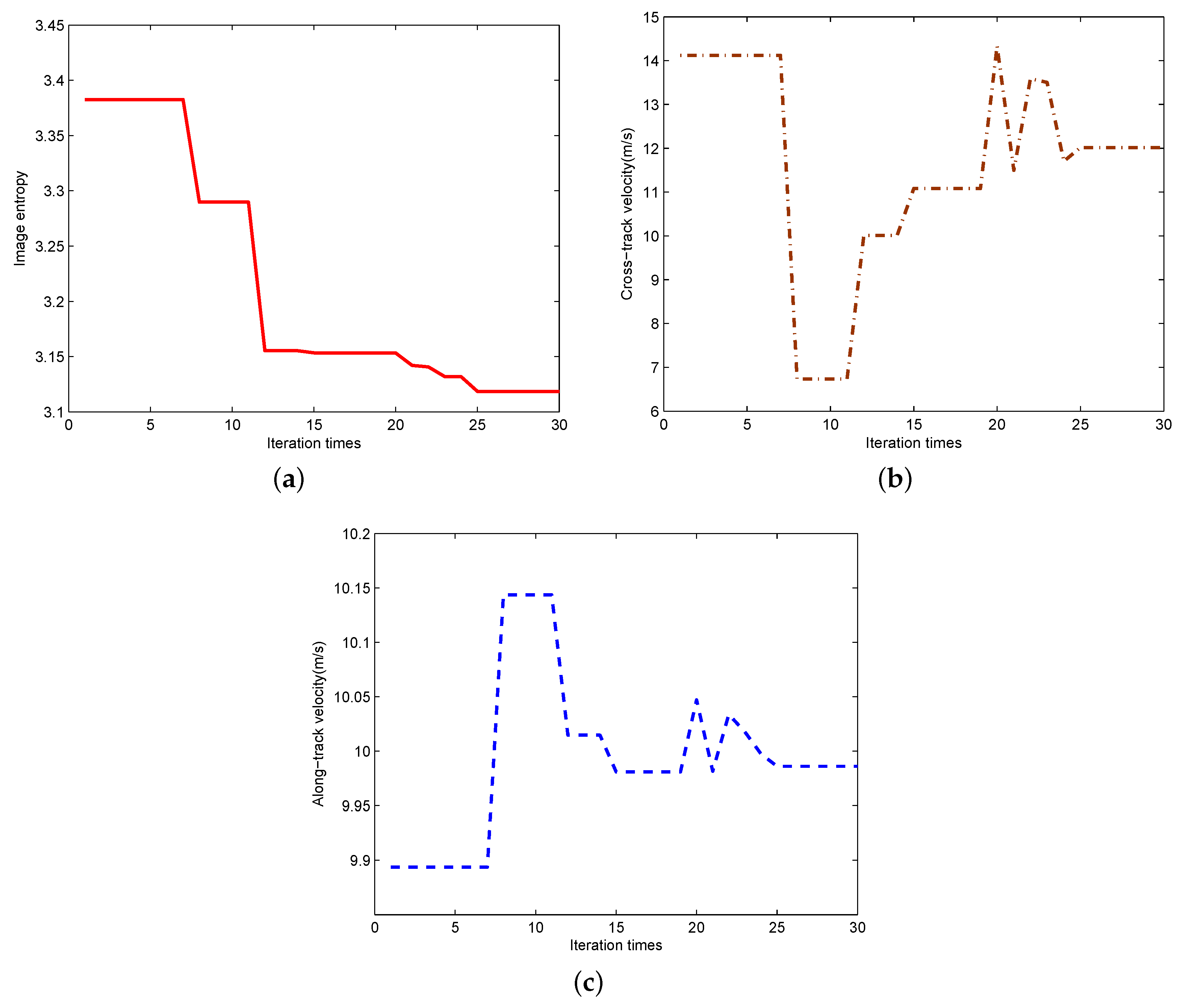
- Compute the local image entropies around the moving target of the two images and ,
- Step 8:
- Produce this generation through the following selector,
- Step 9:
- Continue the above Steps until the local minimum entropy is obtained,where e represents a very small error, such as 10−2.
4. Computational Complexity
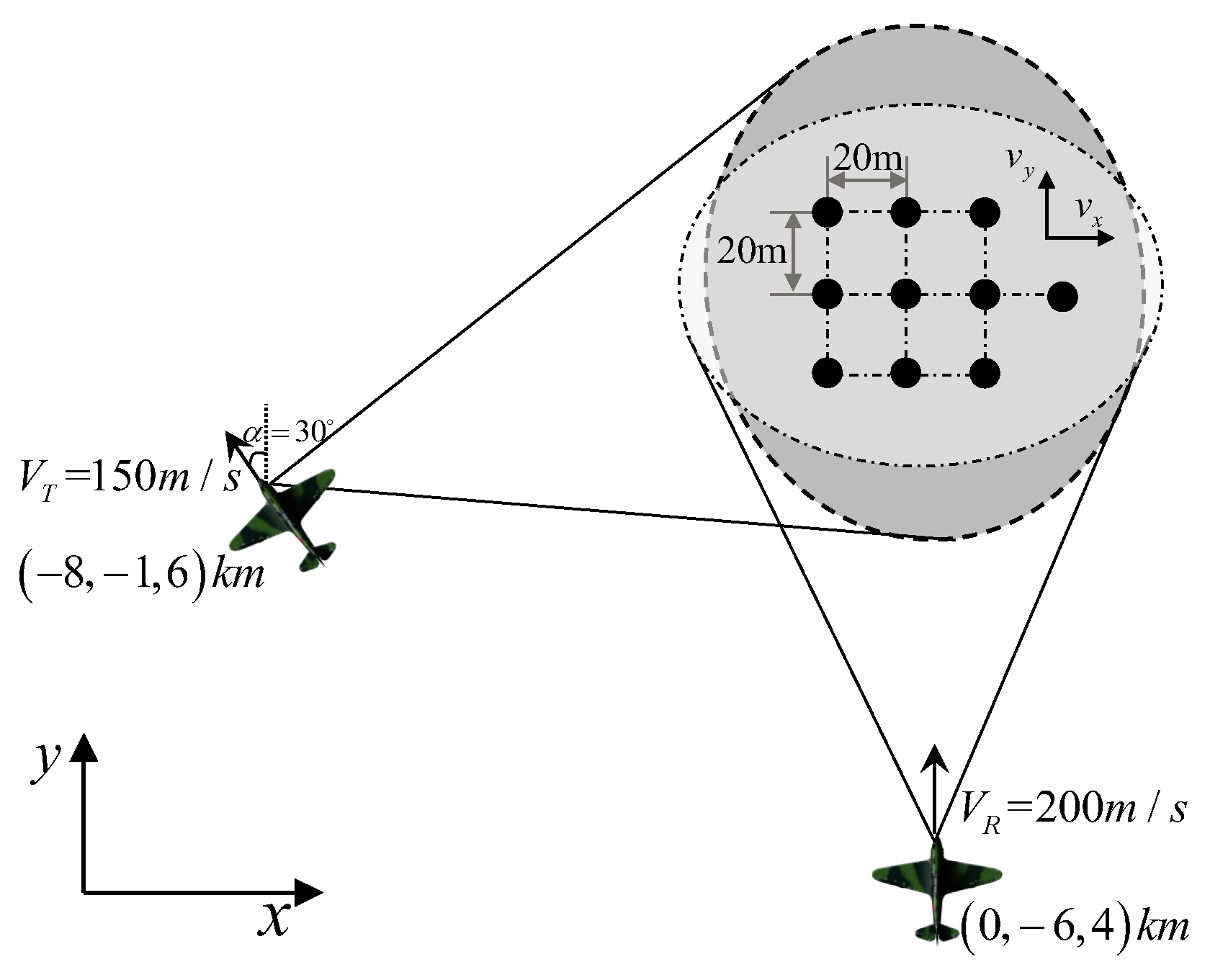
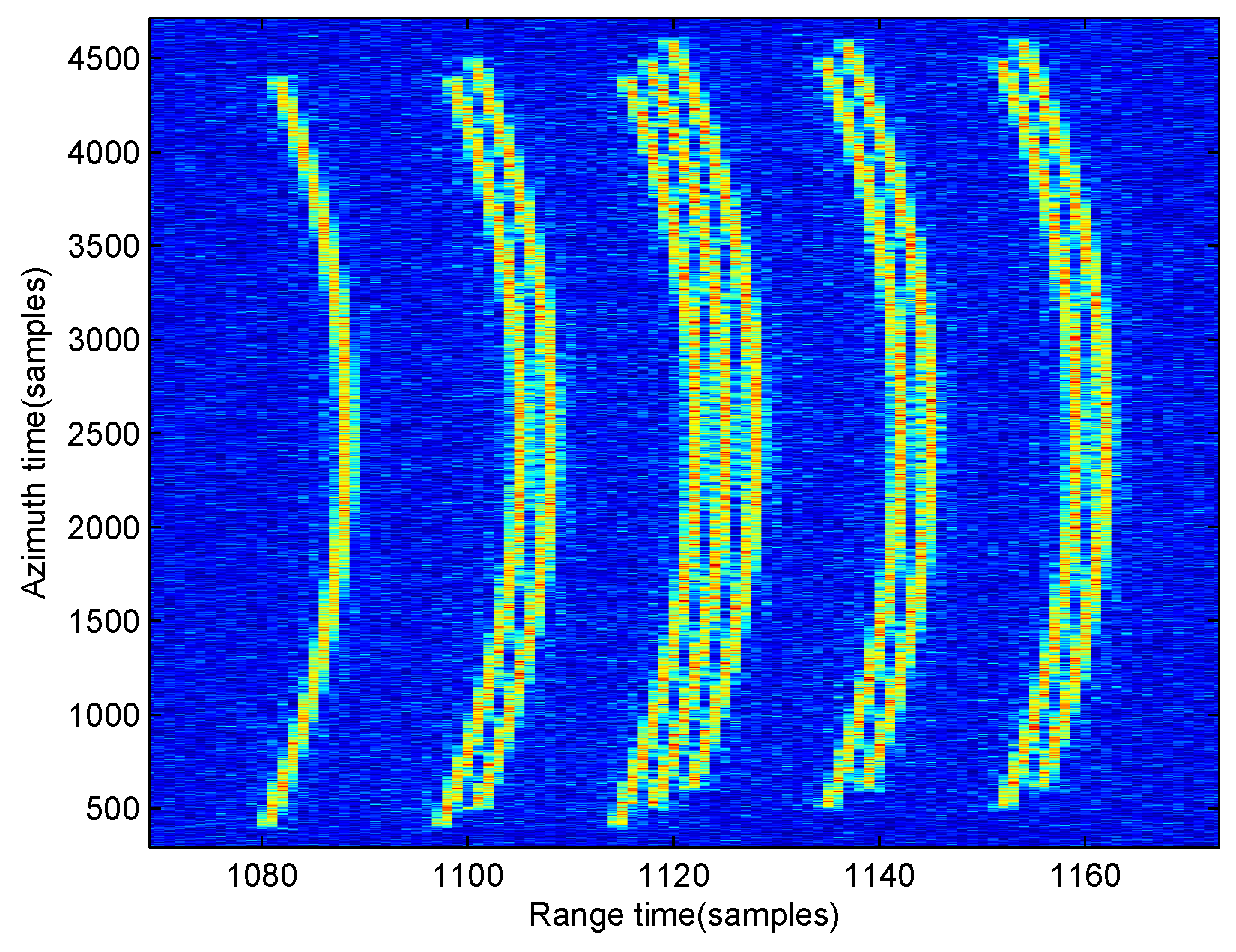
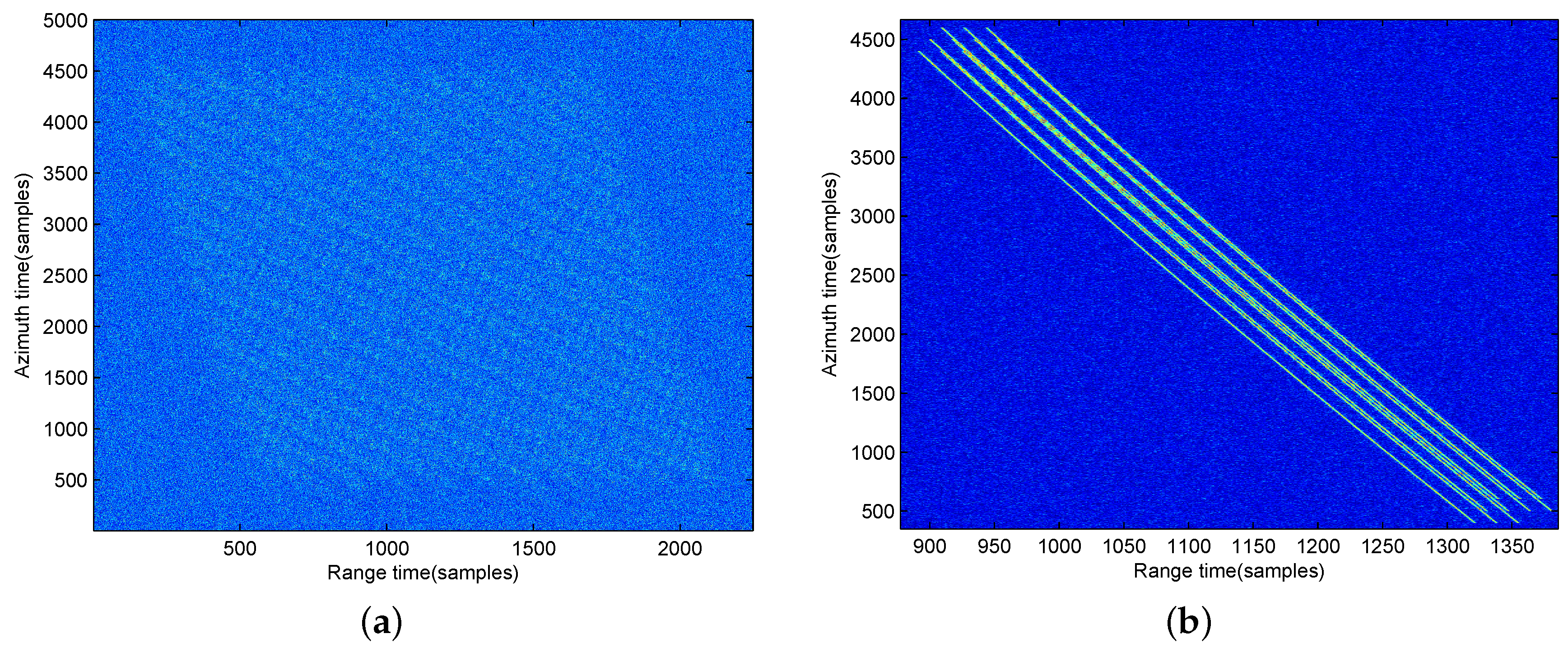
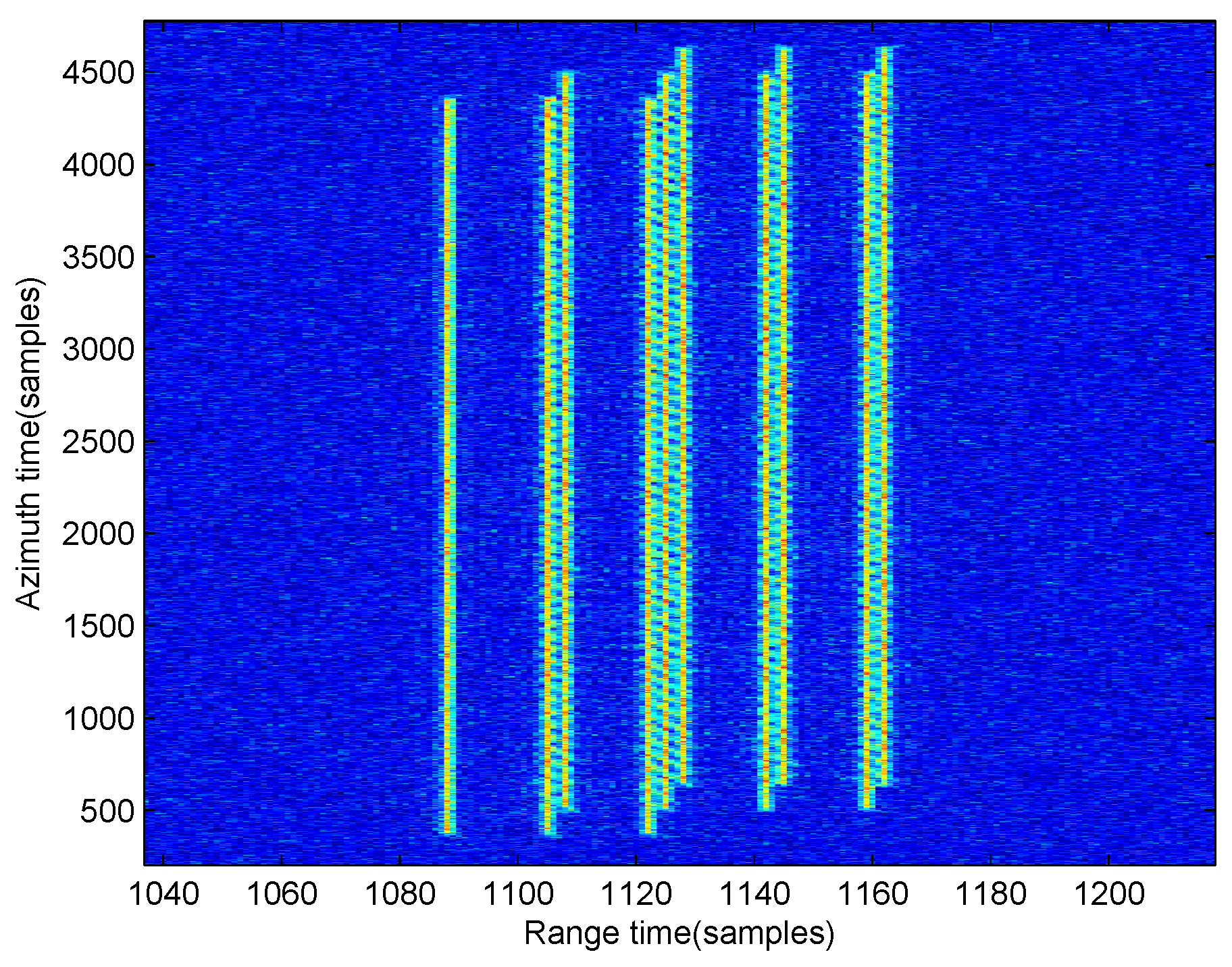
5. Numerical Simulations
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, J.; Yang, J.; Huang, Y.; Yang, H.; Wang, H. Bistatic forward-looking SAR: Theory and challenges. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–4.
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar: System and Signal Processing; John Wiley and Sons: New York, NY, USA, 1991. [Google Scholar]
- Krieger, G.; Fiedler, H.; Moreira, A. Bistatic and multistatic SAR: Potentials and challenges. In Proceedings of the European Conference on Synthetic Aperture Radar, EUSAR04, Friedrichshafen, Germany, 24–27 May 2004; pp. 365–370.
- Zeng, T.; Cherniakov, M.; Long, T. Generalized Approach to Resolution Analysis in BSAR. IEEE Trans. Aerosp. Electr. Syst. 2005, 41, 461–474. [Google Scholar] [CrossRef]
- Nico, G.; Tesauro, M. On the Existence of Coverage and Integration Time Regimes in Bistatic SAR Configurations. IEEE Geosci. Remote Sens. Lett. 2007, 4, 426–430. [Google Scholar] [CrossRef]
- Cherniakov, M. Bistatic Radar: Emerging Technology; John Wiley and Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Qiu, X.; Hu, D.; Ding, C. Some Reflections on Bistatic SAR of Forward-Looking Configuration. IEEE Geosci. Remote Sens. Lett. 2008, 5, 735–739. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Nies, H.; Peters, V. IMage formation algorithm for bistatic forward-looking SAR. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 4091–4094.
- Espeter, T.; Walterscheid, I.; Klare, J.; Brenner, A.R.; Ender, J.H.G. Bistatic Forward-Looking SAR: Results of a Spaceborne/Airborne Experiment. IEEE Geosci. Remote Sens. Lett. 2011, 8, 765–768. [Google Scholar] [CrossRef]
- Yang, J.; Huang, Y.; Yang, H.; Wu, J.; Li, W.; Li, Z.; Yang, X. A first experiment of airborne bistatic forward-looking SAR—Preliminary results. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 4202–4204.
- Klare, J.; Walterscheid, I.; Brenner, A.R.; Ender, J.H.G. Evaluation and Optimisation of Configurations of a Hybrid Bistatic SAR Experiment Between TerraSAR-X and PAMIR. In Proceedings of the 2006 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Denver, CO, USA, 31 July–4 August 2006; pp. 1208–1211.
- Walterscheid, I.; Espeter, T.; Klare, J.; Brenner, A.R.; Ender, J.H.G. Potential and limitations of forward-looking bistatic SAR. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 216–219.
- Yi, Y.; Zhang, L.; Li, Y.; Liu, N.; Liu, X. Range Doppler algorithm for bistatic missile-borne forward-looking SAR. In Proceedings of the 2nd Asian-Pacific Conference on Synthetic Aperture Radar (APSAR 2009), Xi’an, China, 26–30 October 2009; pp. 960–963.
- Wu, J.; Li, Z.; Huang, Y.; Yang, J.; Yang, H.; Liu, Q. Focusing Bistatic Forward-Looking SAR With Stationary Transmitter Based on Keystone Transform and Nonlinear Chirp Scaling. IEEE Geosci. Remote Sens. Lett. 2014, 11, 148–152. [Google Scholar] [CrossRef]
- Wu, J.; Li, Z.; Yang, J.; Huang, Y.; Liu, Q. Focusing translational variant bistatic forward-looking SAR using extended nonlinear Chirp Scaling algorithm. In Proceedings of the 2013 IEEE Radar Conference (RADAR), Ottawa, ON, Canada, 9 April–3 May 2013; pp. 1–5.
- Wu, J.; Huang, Y.; Yang, J.; Gao, P.; Liu, Z.; Li, W.; Yang, H. An omega-K imaging algorithm for bistatic forward-looking SAR with stationary transmitter. In Proceedings of the 2011 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Korea, 26–30 September 2011; pp. 1–2.
- Shin, H.S.; Lim, J.T. Omega-k Algorithm for Airborne Forward-Looking Bistatic Spotlight SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2009, 6, 312–316. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Yi, Q.; Huang, Y.; Yang, J.; Bao, Y. Bistatic forward-looking SAR ground moving target detection and imaging. IEEE Trans. Aerosp. Electr. Syst. 2015, 51, 1000–1016. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Huang, Y.; Sun, Z.; Yang, J. A ground moving target detection and imaging method in Doppler-rate domain for Bistatic forward-looking SAR. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 2826–2829.
- Li, Z.; Wu, J.; Huang, Y.; Sun, Z.; Yang, J. Ground-Moving Target Imaging and Velocity Estimation Based on Mismatched Compression for Bistatic Forward-Looking SAR. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3277–3291. [Google Scholar] [CrossRef]
- Li, Z.; Wu, J.; Huang, Y.; Yang, H.; Yang, J. Nonsearching Doppler parameter and velocity estimation method for synthetic aperture radar ground moving-target imaging. J. Appl. Remote Sens. 2016, 10, 035006. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R. SAR imaging of moving targets. IEEE Trans. Aerosp. Electr. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Wong, F.H.; Yeo, T.S. New application of nonlinear chirp scaling in SAR data processing. IEEE Trans. Geosci. Remote Sens. 2001, 39, 946–953. [Google Scholar] [CrossRef]
- An, D.X.; Huang, X.T.; Jin, T.; Zhou, Z. Extended Nonlinear Chirp Scaling Algorithm for High-Resolution Highly Squint SAR Data Focusing. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3595–3609. [Google Scholar] [CrossRef]
- Gull, S.F.; Daniell, G.J. Image reconstruction from incomplete and noisy data. Nature 1978, 272, 686–690. [Google Scholar] [CrossRef]
- Wang, J.; Liu, X. SAR minimum-entropy autofocus using an adaptive-order polynomial model. IEEE Geosci. Remote Sens. Lett. 2016, 3, 512–516. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput. Syst. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Adaptive Scheme for Global Optimization Over Continuous Spaces; ICSI Berkeley: Berkeley, CA, USA, 1995; Volume 3. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Center frequency | GHz |
| Range bandwidth | 200 MHz |
| PRF | 1000 Hz |
| GMT center Location | m |
| Transmitter Location | km |
| Receiver Location | km |
| Receiver’s Velocity | 200 m/s |
| Transmitter’s Velocity | 150 m/s |
| Angle α |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wu, J.; Huang, Y.; Yang, H.; Yang, J. An Adaptive Moving Target Imaging Method for Bistatic Forward-Looking SAR Using Keystone Transform and Optimization NLCS. Sensors 2017, 17, 216. https://doi.org/10.3390/s17010216
Li Z, Wu J, Huang Y, Yang H, Yang J. An Adaptive Moving Target Imaging Method for Bistatic Forward-Looking SAR Using Keystone Transform and Optimization NLCS. Sensors. 2017; 17(1):216. https://doi.org/10.3390/s17010216
Chicago/Turabian StyleLi, Zhongyu, Junjie Wu, Yulin Huang, Haiguang Yang, and Jianyu Yang. 2017. "An Adaptive Moving Target Imaging Method for Bistatic Forward-Looking SAR Using Keystone Transform and Optimization NLCS" Sensors 17, no. 1: 216. https://doi.org/10.3390/s17010216