
On the Choice of Access Point Selection Criterion and Other Position Estimation Characteristics for WLAN-Based Indoor Positioning



Abstract
:
1. Introduction
2. Related Work
3. Positioning Principles
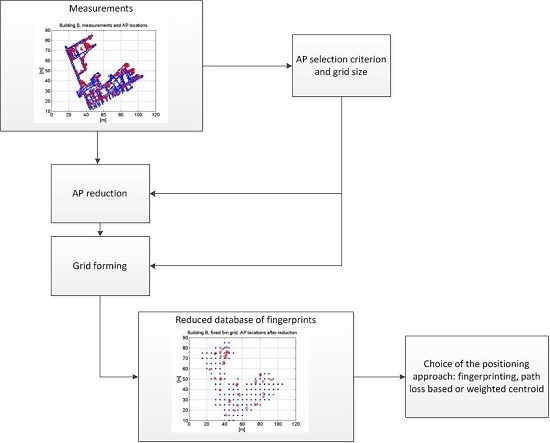
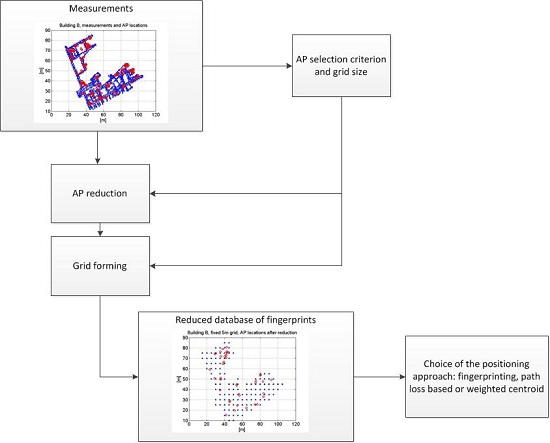
3.1. Offline Training Phase
3.2. Online Estimation Phase
3.2.1. Fingerprinting
3.2.2. Path Loss-Based Positioning
3.2.3. Weighted Centroid-Based Positioning
4. AP Selection Criteria
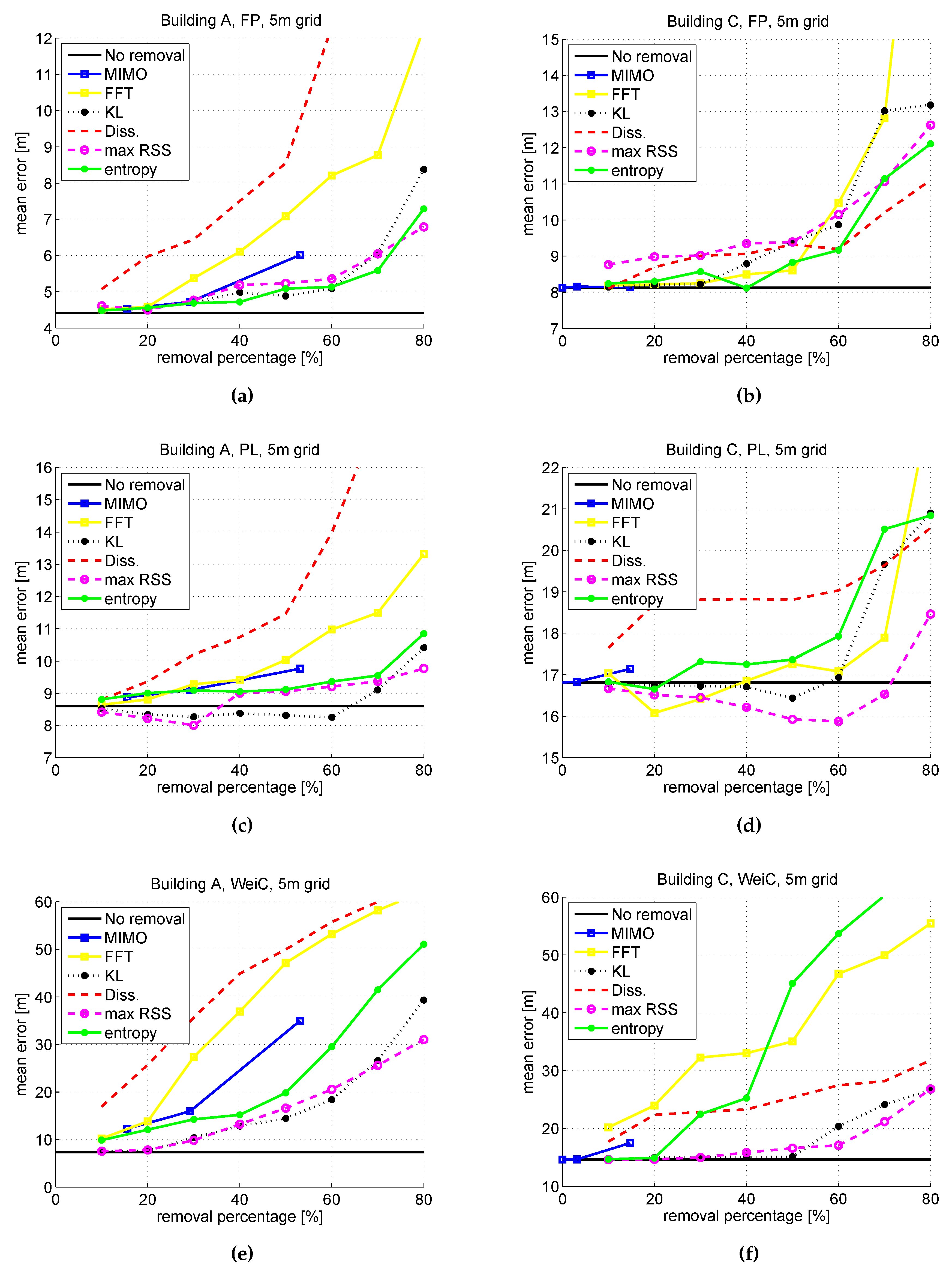
- No Selection. In this criterion, no selection is performed, but all APs are kept in the position calculation. The criterion offers the benchmark results to understand better the effect of AP selection.
- Maximum RSS (maxRSS). In this criterion, APs with maximum RSS value are selected to the AP subset. This method is basically the same as max-mean of Youssef et al. in [4], but the difference is that we consider only the maximum RSS instead of the average RSS when sorting the APs. The reason for this is that it has been noticed that maxRSS has similar or slightly better performance than the max-mean algorithm [21].
- Entropy/InfoGain. In this criterion, the so-called entropy of RSS is calculated for each AP, and the APs with maximum entropy are chosen for the AP subset. This criterion is based on InfoGain in [30], with only slight modifications. The entropy used in this paper is defined in the following manner, by using an analogy with the definition of the classical entropy [43]:where includes the RSSs of th AP in vector form (i.e., ) and × represents the point multiplication.
- MIMO/Multiple BSSID Selection. As already discussed, several BSSIDs per one WLAN AP (i.e., transmissions with multiple MACs coming from the same physical location), are possible today. The purpose of this selection criterion is to avoid to use correlated data that the similar or closely located APs may offer. These kind of MIMO APs (or any other APs containing several MACs) are in our research identified only based on their estimated position: if more than one AP seem to be located within maximum one meter range, only one among them is chosen. The unknown AP locations are estimated as in Equation (4). Since AP infrastructure is optimized primarily for communication purposes, it is possible that two or more independent APs are really located close to each other. However, since the range-based position estimation is the only possibility in our research to define the APs that are located to each other, these kind of situations are not considered. Three different selection options are studied here: only one (with the maximum average RSS), two or three APs among the closely located ones will be kept, removal percentage being naturally the highest in the first case, where only one AP is selected. We remark that the total number of APs located at the same place (i.e., MIMO APs) depends on the AP infrastructure of the building.
- FFT. In an FFT-based criterion, we first sort the APs in a descending order, based on the spectral information computed in the FFT domain. The FFT is calculated over a matrix that contains the RSS information of each AP in every fingerprint (i.e., size of the matrix is ). If an AP is heard in a fingerprint i, the RSS input is . is a threshold chosen according to an assumption that the lowest expected RSS is dB, and thus, . If an AP is not heard in the particular fingerprint, the RSS input is set to 0. After the FFT is performed over the information matrix, the APs are sorted decreasingly, based on the maximum value in the FFT-matrix.
- KL. In this criterion, a divergence value is calculated for every AP. This is done using the Kullback–Leibler (KL) criterion for divergence. By KL analogy, we define , whereThe APs with highest KL divergence value are selected to the AP subset.
- Dissimilarities. Another possible criterion is based on dissimilarities between APs. First, a dissimilarity matrix is built based on the RSS differences between any pair of APs, as below:where is the mean RSS heard from -th AP. Further on, an independent dissimilarity value is calculated for every AP as a sum over the dissimilarities between the AP and other APs. AP subset is then chosen according to their maximum dissimilarity value.
5. Measurement Analysis
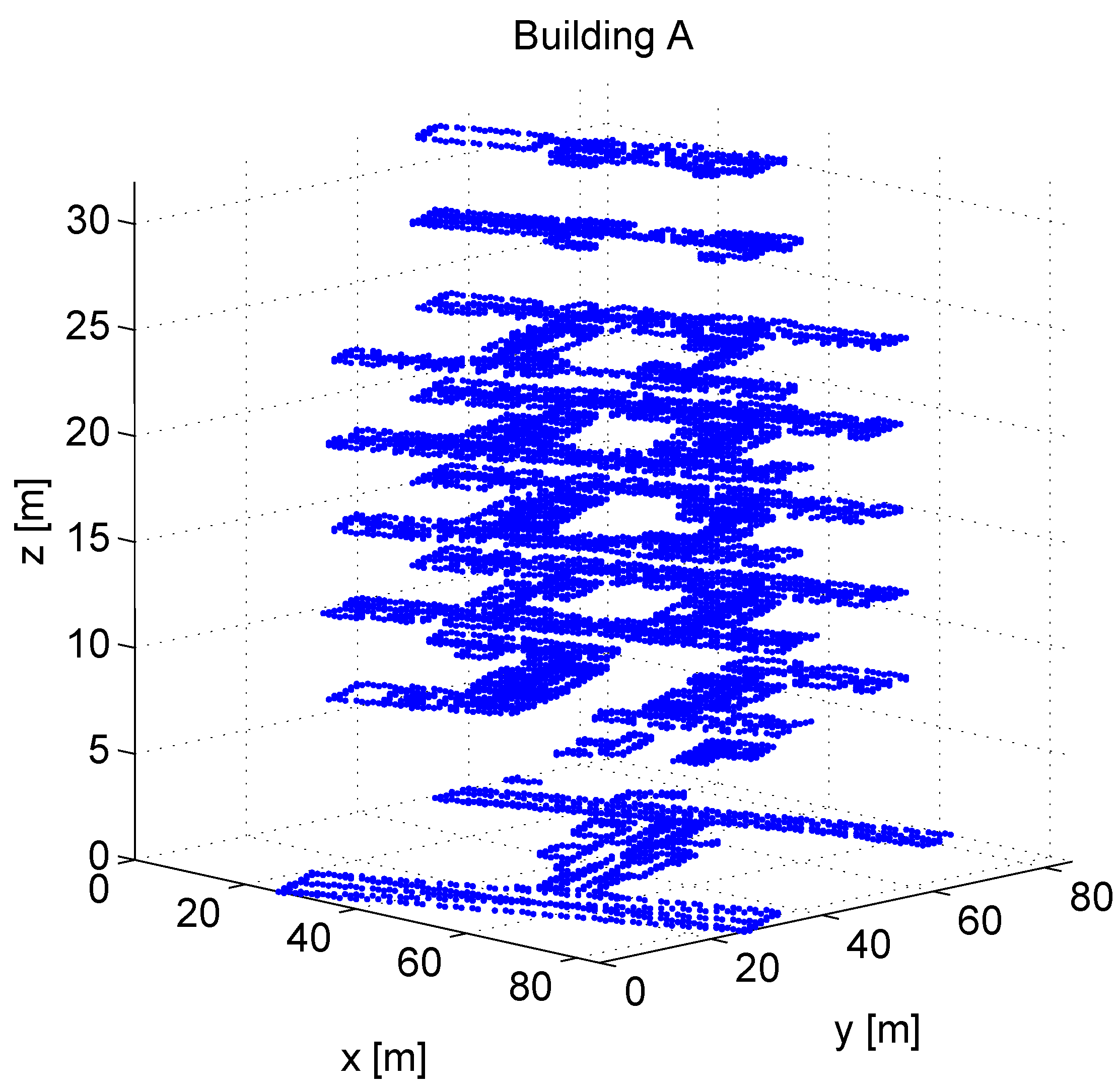
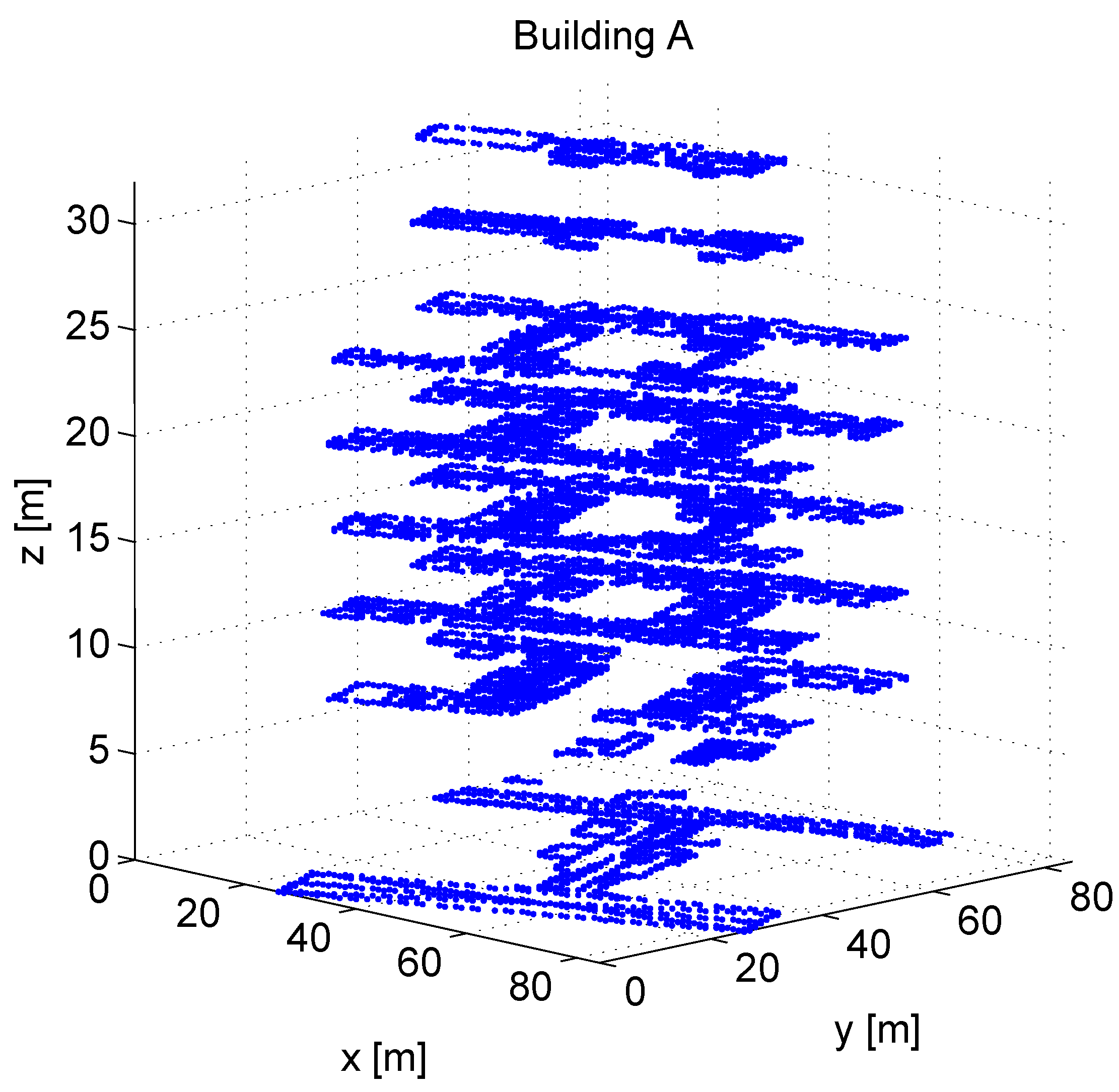
5.1. Measurement Scenarios
5.2. Positioning Algorithm Comparison
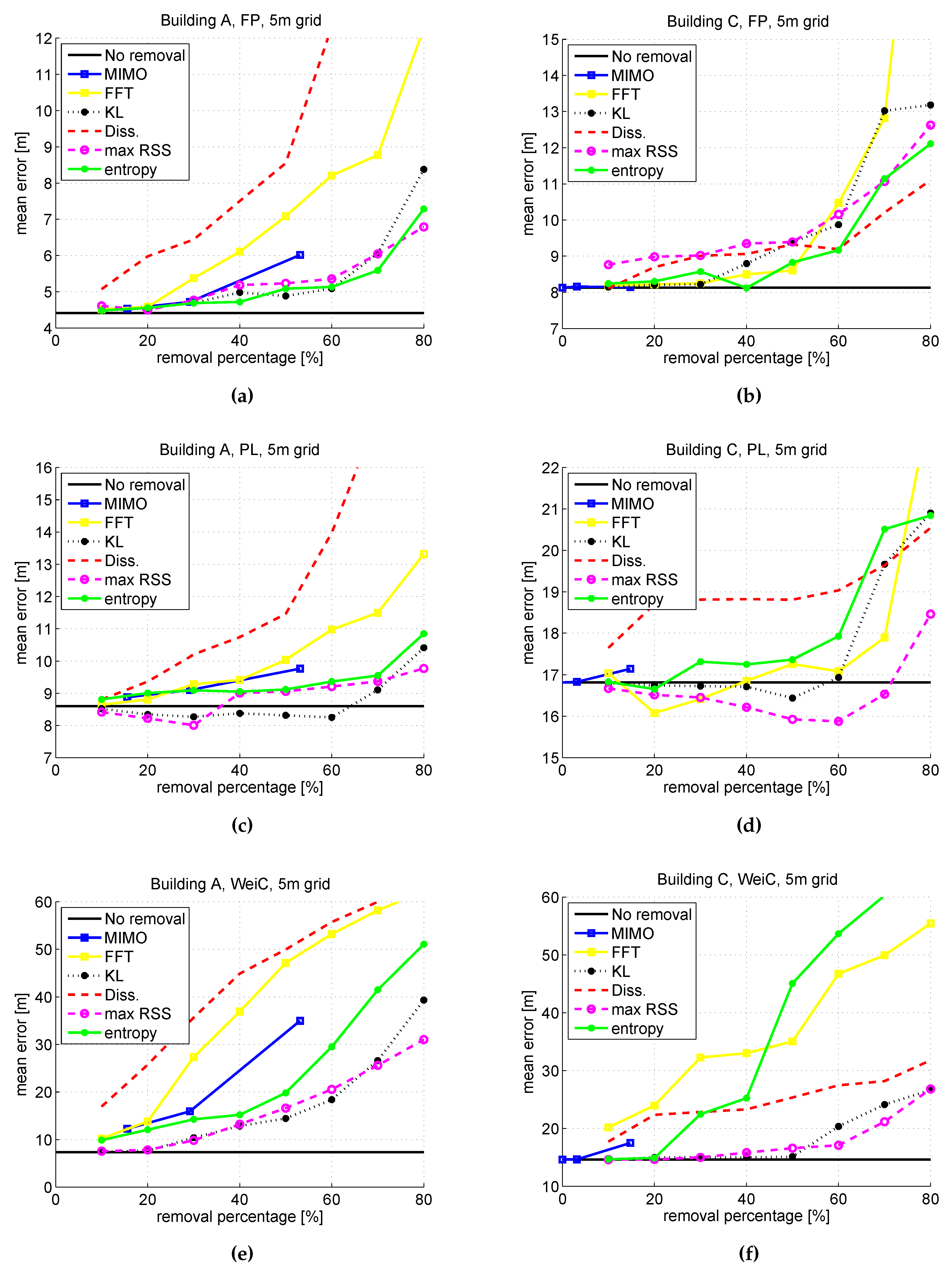
5.3. AP Selection
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fang, S.H.; Lin, T.N. Accurate Indoor Location Estimation by Incorporating the Importance of Access Points in Wireless Local Area Networks. In Proceedings of the Global Telecommunications Conference (GLOBECOM 2010), Miami, FL, USA, 6–10 December 2010; pp. 1–5.
- Rappaport, T.S.; Reed, J.H.; Woerner, D. Position location using wireless communications on highways of the future. IEEE Commun. Mag. 1996, 34, 33–41. [Google Scholar] [CrossRef]
- Seco-Granados, G.; López-Salcedo, J.; Jiménez-Baños, D.; López-Risueño, G. Challenges in indoor GNSS: Unveiling its core features in signal processing. IEEE Signal Process. Mag. 2012, 29, 108–131. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A.; Shankar, A.U. WLAN Location Determination via Clustering and Probability Distributions. In Proceedings of the Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003; pp. 143–150.
- Mazuelas, S.; Bahillo, A.; Lorenzo, R.M.; Fernandez, P. Robust indoor positioning provided by real-time RSSI values in unmodified WLAN networks. IEEE J. Sel. Top. Signal Process. 2009, 3, 821–831. [Google Scholar] [CrossRef]
- Liu, X.-D.; He, W.; Tian, Z.-S. The Improvement of RSS-based Location Fingerprint Technology for Cellular Networks. In Proceedings of the Computer Science & Service System (CSSS), Nanjing, China, 11–13 August 2012; pp. 1267–1270.
- Koweerawong, C.; Wipusitwarakun, K.; Kaemarungsi, K. Indoor Localization Improvement via Adaptive RSS Fingerprinting Database. In Proceedings of the Information Networking, Bangkok, Thailand, 28–30 January 2013; pp. 412–416.
- Vo, Q.D.; De, P. A Survey of Fingerprint-Based Outdoor Localization. IEEE Commun. Surv. Tutor. 2015, 18, 491–506. [Google Scholar] [CrossRef]
- Nurminen, H.; Talvitie, J.; Ali-Löytty, S.; Müller, P. Statistical Path Loss Parameter Estimation and Positioning Using RSS Measurements in Indoor Wireless Networks. In Proceedings of the Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–9.
- Shrestha, S.; Talvitie, J.; Lohan, E.S. Deconvolution-Based Indoor Localization with WLAN Signals and Unknown Access Point Locations. In Proceedings of the Localization and GNSS (ICL-GNSS), Turin, Italy, 25–27 June 2013; pp. 1–6.
- Liu, Y.; Yi, X.; He, Y. A novel centroid localization for wireless sensor networks. Int. J. Distrib. Sens. Netw. 2012, 2012. [Google Scholar] [CrossRef]
- Dong, Q.; Xu, X. A novel weighted centroid localization algorithm based on RSSI for an outdoor environment. J. Commun. 2014, 9, 279–285. [Google Scholar] [CrossRef]
- Blumenthal, J.; Grossmann, R.; Golatowski, F.; Timmermann, D. Weighted Centroid Localization in Zigbee-based Sensor Networks. In Proceedings of the International Symposium on Intelligent Signal Processing (WISP), Alcala de Henares, Spain, 3–5 October 2007; pp. 1–6.
- Razavi, A.; Valkama, M.; Lohan, E.S. K-Means Fingerprint Clustering for Low-Complexity Floor Estimation in Indoor Mobile Localization. In Proceedings of the Globecom Workshop on Localization and Tracking: Indoors, Outdoors and Emerging Networks, San Diego, CA, USA, 6–10 December 2015; pp. 1–7.
- Huang, Z.; Xia, J.; Yu, H.; Guan, Y.; Chen, J. Clustering Combined Indoor Localization Algorithms for Crowdsourcing Devices: Mining RSSI Relative Relationship. In Proceedings of the Wireless Communications and Signal Processing (WCSP), Hefei, China, 23–25 October 2014; pp. 1–6.
- Kuo, S.P.; Wu, B.J.; Peng, W.C.; Tseng, Y.C. Cluster Enhanced Techniques for Pattern-Matching Localization Systems. In Proceedings of the Mobile Adhoc and Sensor Systems (MASS), Pisa, Italy, 8–11 October 2007; pp. 1–9.
- Talvitie, J.; Renfors, M.; Lohan, E.S. Novel indoor positioning mechanism via spectral compression. IEEE Commun. Lett. 2015, 20, 352–355. [Google Scholar] [CrossRef]
- Kushki, A.; Plataniotis, K.; Venetsanopoulos, A. Sensor Selection for Mitigation of RSS-based Attacks in Wireless Local Area Network Positioning. In Proceedings of the Acoustics, Speech and Signal Processing (ICASSP), Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2065–2068.
- Fang, S.H.; Wang, C.H. A dynamic hybrid projection approach for improved Wi-Fi location fingerprinting. IEEE Trans. Veh. Technol. 2011, 60, 1037–1044. [Google Scholar] [CrossRef]
- Yin, J.; Yang, Q.; Ni, L. Learning adaptive temporal radio maps for signal-strength-based location estimation. IEEE Trans. Mob. Comput. 2008, 7, 869–883. [Google Scholar] [CrossRef]
- Laitinen, E.; Lohan, E.S.; Talvitie, J.; Shrestha, S. Access Point Significance Measures in WLAN-based Location. In Proceedings of the Positioning Navigation and Communication (WPNC), Dresden, Germany, 15–16 March 2012; pp. 24–29.
- Laitinen, E.; Lohan, E.S. Are All the Access Points Necessary in WLAN-based Indoor Positioning? In Proceedings of the Localization and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–6.
- Fang, S.H.; Lin, T. Principal component localization in indoor WLAN environments. IEEE Trans. Mob. Comput. 2012, 11, 100–110. [Google Scholar] [CrossRef]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received signal strength based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2011, 11, 1983–1993. [Google Scholar] [CrossRef]
- Zou, H.; Luo, Y.; Lu, X.; Jiang, H.; Xie, L. A Mutual Information Based Online Access Point Selection Strategy for WiFi Indoor Localization. In Proceedings of the Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 180–185.
- Zhou, Y.; Chen, X.; Zeng, S.; Liu, J.; Liang, D. AP selection algorithm in WLAN indoor localization. Inf. Technol. J. 2013, 12, 3773–3776. [Google Scholar] [CrossRef]
- Kushki, A.; Plataniotis, K.N.; Venetsanopoulos, A.N. Kernel-based positioning in wireless local area networks. IEEE Trans. Mob. Comput. 2007, 6, 689–705. [Google Scholar] [CrossRef]
- Miao, H.; Wang, Z.; Wang, J.; Zhang, L.; Liu, Z. A Novel Access Point Selection Strategy for Indoor Location with Wi-Fi. In Proceedings of the Control and Decision Conference (CCDC), Changsha, China, 31 May–2 June 2014; pp. 5260–5265.
- Liang, D.; Zhang, Z.; Peng, M. Access point reselection and adaptive cluster splitting-based indoor localization in wireless local area networks. IEEE Internet Things J. 2015, 2, 573–585. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, Q.; Yin, J.; Cha, X. Power-efficient access-point selection for indoor location estimation. IEEE Trans. Knowl. Data Eng. 2006, 18, 877–888. [Google Scholar] [CrossRef]
- Yuan, H.; Ni, Q.; Yao, W.; Song, Y. Design of A Novel Indoor Location Sensing Mechanism using IEEE 802.11e WLANs. In Proceedings of the Seventh Annual PostGraduate Symposium in Telecommunications and Network System (PGNet), Liverpool, UK, 26–27 June 2006.
- Yuan, H.; Ni, Q.; Yao, W.; Song, Y. Optimizing Distribution of Location Sensor in Location System. In Proceedings of the London Communications Symposium, London, UK, 14–15 September 2006.
- Alcantarilla, P.F.; Yebes, J.J.; Almazan, J.; Bergasa, L.M. On Combining Visual SLAM and Dense Scene Flow to Increase the Robustness of Localization and Mapping in Dynamic Environments. In Proceedings of the Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 1290–1297.
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Vuckovic, M.; Petrovic, I.; Vidovic, D.; Kostovic, Z.; Pletl, S.; Kukolj, D. Space Grid Resolution Impact on Accuracy of the Indoor Localization Fingerprinting. In Proceedings of the Telecommunications Forum (TELFOR), Belgrade, Serbia, 22–24 November 2011; pp. 321–324.
- Kim, Y.; Chon, Y.; Cha, H. Smartphone-based collaborative and autonomous radio fingerprinting. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2010, 42, 112–122. [Google Scholar] [CrossRef]
- Shu, Y.; Huang, Y.; Zhang, J.; Coué, P.; Cheng, P.; Chen, J.; Shin, K.G. Gradient-based fingerprinting for indoor localization and tracking. IEEE Trans. Ind. Electron. 2015, 63, 2424–2433. [Google Scholar] [CrossRef]
- Honkavirta, V.; Perälä, T.; Ali-Löytty, S.; Piché, R. A Comparative Survey of WLAN Location Fingerprinting Methods. In Proceedings of the Positioning, Navigation and Communication (WPNC), Hannover, Germany, 19 March 2009; pp. 243–251.
- Lohan, E.S.; Koski, K.; Talvitie, J.; Ukkonen, L. WLAN and RFID Propagation Channels for Hybrid Indoor Positioning. In Proceedings of the Localization and GNSS (ICL-GNSS), Helsinki, Finland, 24–26 June 2014; pp. 1–6.
- Lohan, E.S.; Talvitie, J.; Figueiredo e Silva, P.; Nurminen, H.; Ali-Löytty, S.; Piché, R. Received Signal Strength models for WLAN and BLE-based indoor positioning in multi-floor buildings. In Proceedings of the Localization and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–6.
- Evrendilek, C.; Akcan, H. On the Complexity of trilateration with noisy range measurements. IEEE Commun. Lett. 2011, 15, 1097–1099. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Y. Quality of trilateration: Confidence-based iterative localization. IEEE Trans. Parallel Distrib. Syst. 2010, 21, 631–640. [Google Scholar] [CrossRef]
- Yeung, R.W. A First Course in Information Theory; Kluwer Academic/Plenum Publishers: Dordrecht, The Netherlands, 2002. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Grid Resolution | |||||
|---|---|---|---|---|---|---|
| A | Berlin, Germany | 1 m | 250 | 727 | 9 | |
| 5 m | 1446 | |||||
| 10 m | 516 | |||||
| B | Tampere, Finland | 1 m | 8201 | 250 | 1213 | 4 |
| 5 m | 1082 | |||||
| 10 m | 398 | |||||
| C | Tampere, Finland | 1 m | 1988 | 250 | 162 | 3 |
| 5 m | 373 | |||||
| 10 m | 141 |
| FP | PL | WeiC | ||
|---|---|---|---|---|
| Building A | 1 m grid | 3635 ( of ) | 2181 ( of ) | |
| 5 m grid | 3635 ( of ) | 2181 ( of ) | ||
| 10 m grid | 3635 ( of ) | 2181 ( of ) | ||
| Building B | 1 m grid | 6065 ( of ) | 3639 ( of ) | |
| 5 m grid | 6065 ( of ) | 3639 ( of ) | ||
| 10 m grid | 6065 ( of ) | 3639 ( of ) | ||
| Building C | 1 m grid | 810 ( of ) | 486 ( of ) | |
| 5 m grid | 810 ( of ) | 486 ( of ) | ||
| 10 m grid | 810 ( of ) | 486 ( of ) |
| Building | Grid [m] | FP | PL | WeiC | |
|---|---|---|---|---|---|
| Building A | 1 | No removal | s | ||
| removal | |||||
| 5 | No removal | ||||
| removal | |||||
| Building B | 1 | No removal | s | ||
| removal | |||||
| 5 | No removal | ||||
| removal |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laitinen, E.; Lohan, E.S. On the Choice of Access Point Selection Criterion and Other Position Estimation Characteristics for WLAN-Based Indoor Positioning. Sensors 2016, 16, 737. https://doi.org/10.3390/s16050737
Laitinen E, Lohan ES. On the Choice of Access Point Selection Criterion and Other Position Estimation Characteristics for WLAN-Based Indoor Positioning. Sensors. 2016; 16(5):737. https://doi.org/10.3390/s16050737
Chicago/Turabian StyleLaitinen, Elina, and Elena Simona Lohan. 2016. "On the Choice of Access Point Selection Criterion and Other Position Estimation Characteristics for WLAN-Based Indoor Positioning" Sensors 16, no. 5: 737. https://doi.org/10.3390/s16050737