
A Comparison of Alternative Distributed Dynamic Cluster Formation Techniques for Industrial Wireless Sensor Networks

Abstract
:1. Introduction
2. Related Work
2.1. Wireless Sensor Network Localization
2.2. Wireless Sensor Node Clustering Strategies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Network Type | Localization | Clustering Technique | Notes |
|---|---|---|---|---|
| Horling et al. [10] | heterogeneous | range-free | pre-defined (static) | Use of software agents for clustering |
| Bandyopadhyay and Coyle [11] | homogeneous | range-based | pre-defined (static) | Energy efficiency |
| Yu et al. [12] | homogeneous | range-based | pre-defined (dynamic) | Energy efficiency |
| Sun et al. [13] | homogeneous | range-based | pre-defined (static) | Security |
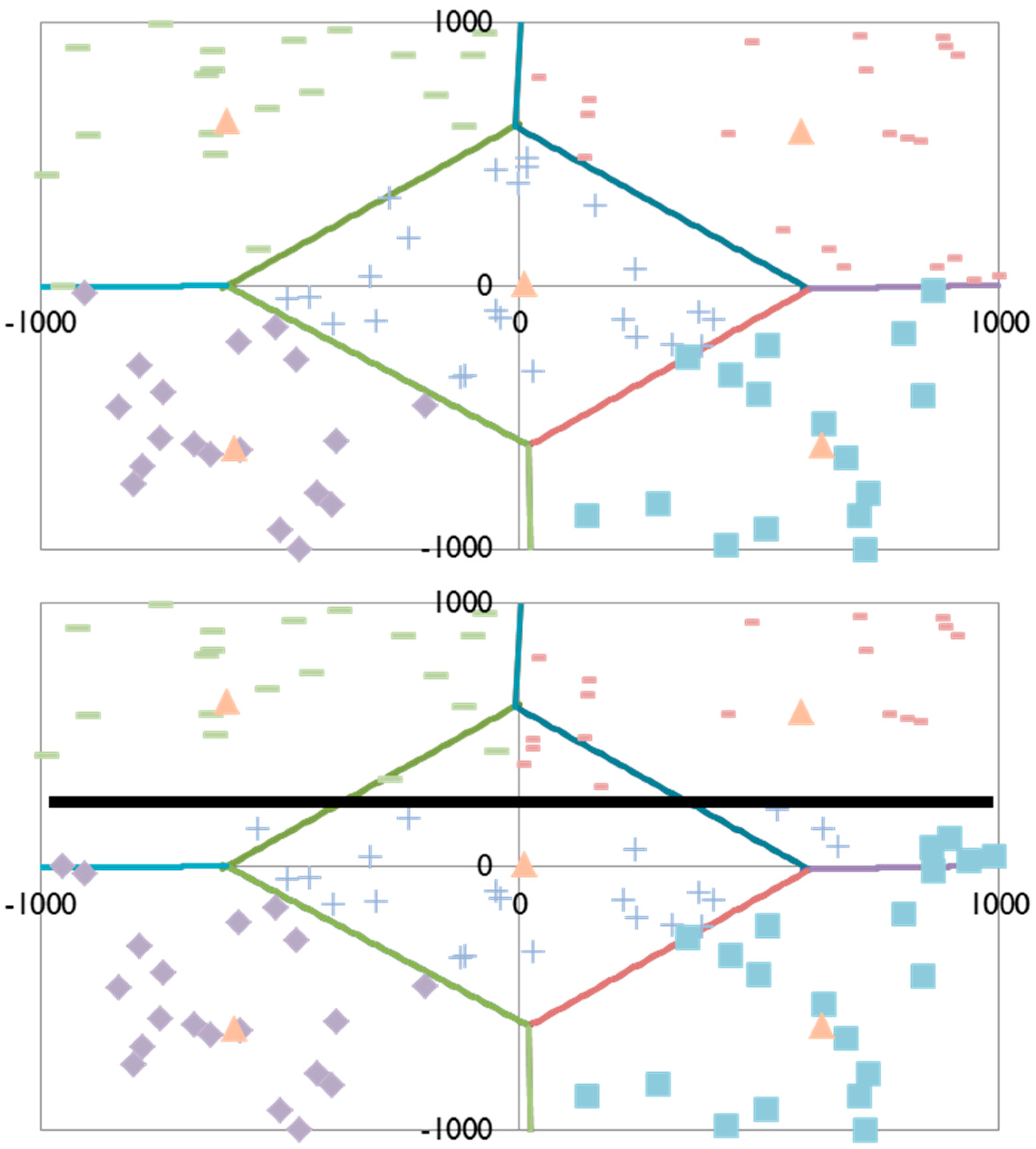
| Chen et al. [15] | heterogeneous | range-free | pre-defined (dynamic) | Voronoi cells |
| Boukerche et al. [16] | heterogeneous | range-based | pre-defined (static) | Voronoi cells |
| Gholami and Brennan [17] | heterogeneous | range-free | pre-defined (dynamic) | Voronoi cells |
| Savarese et al. [18] | heterogeneous | range-based | ad hoc | map-based |
| Basagni [19] | homogeneous | range-based | ad hoc | Weight-based criterion to determine CH |
3. Distributed Clustering Techniques
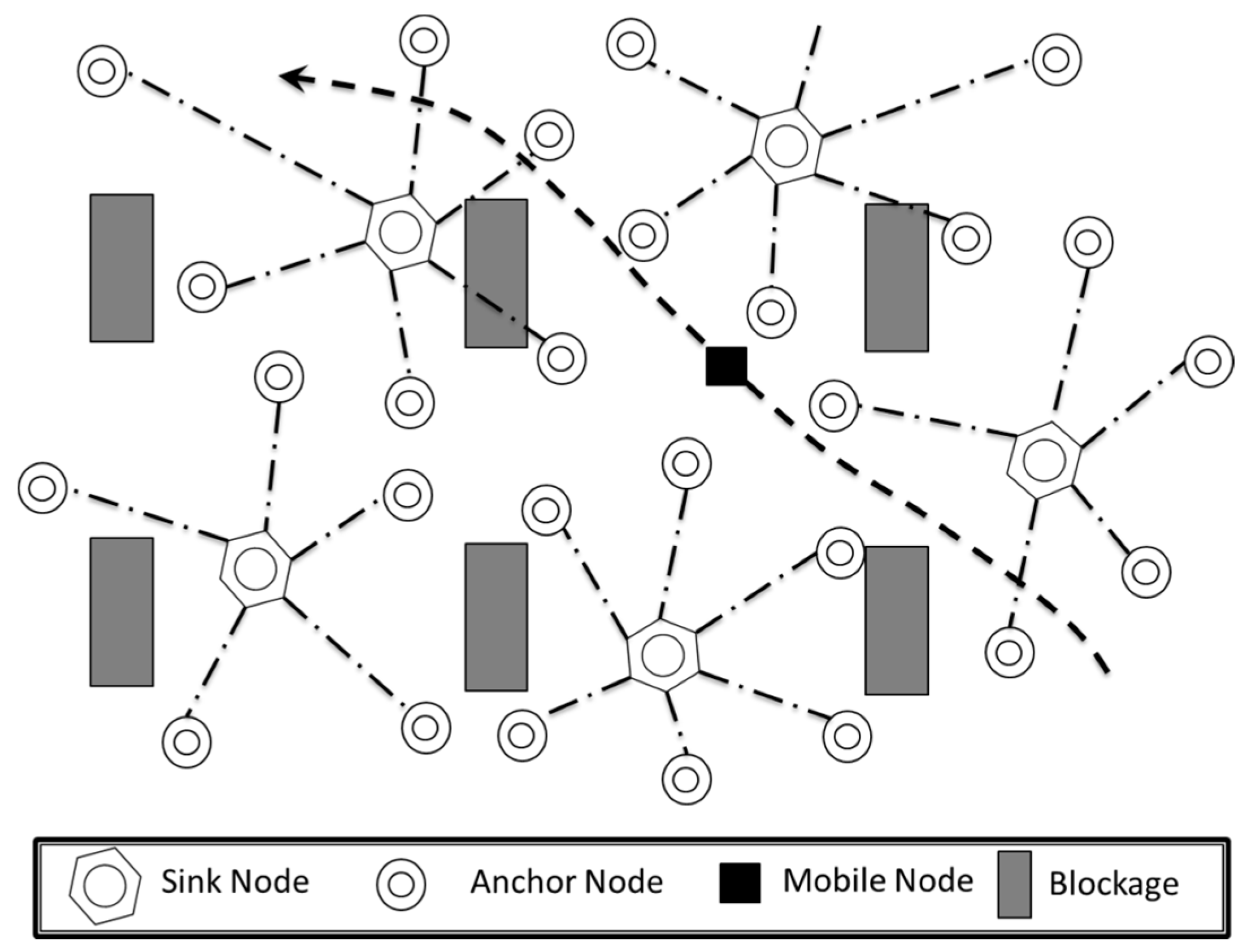
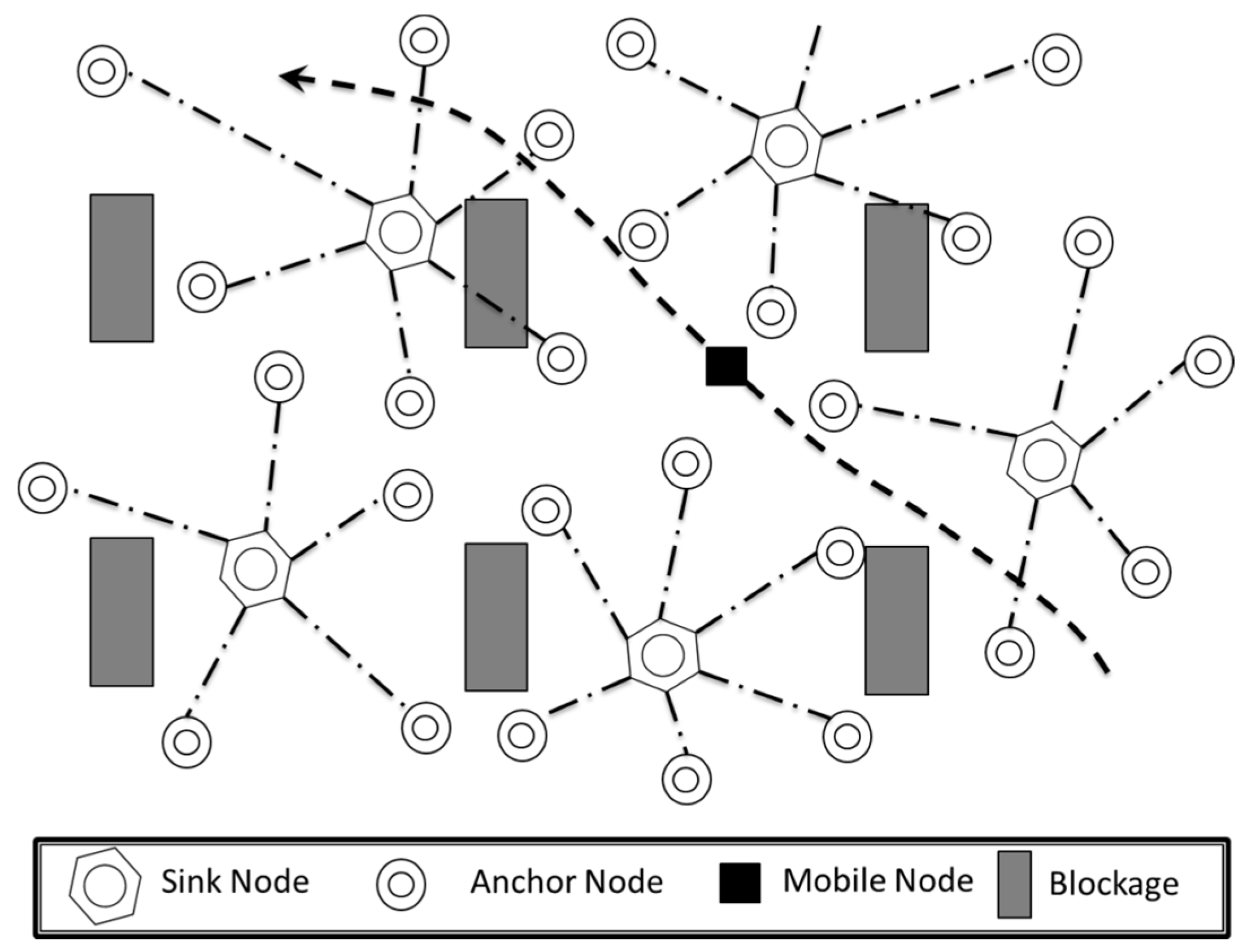
3.1. The Wireless Sensor Network Architecture
3.2. Cluster Formation Techniques
| Cluster Formation Technique | Protocol | Cluster Head | Notes |
|---|---|---|---|
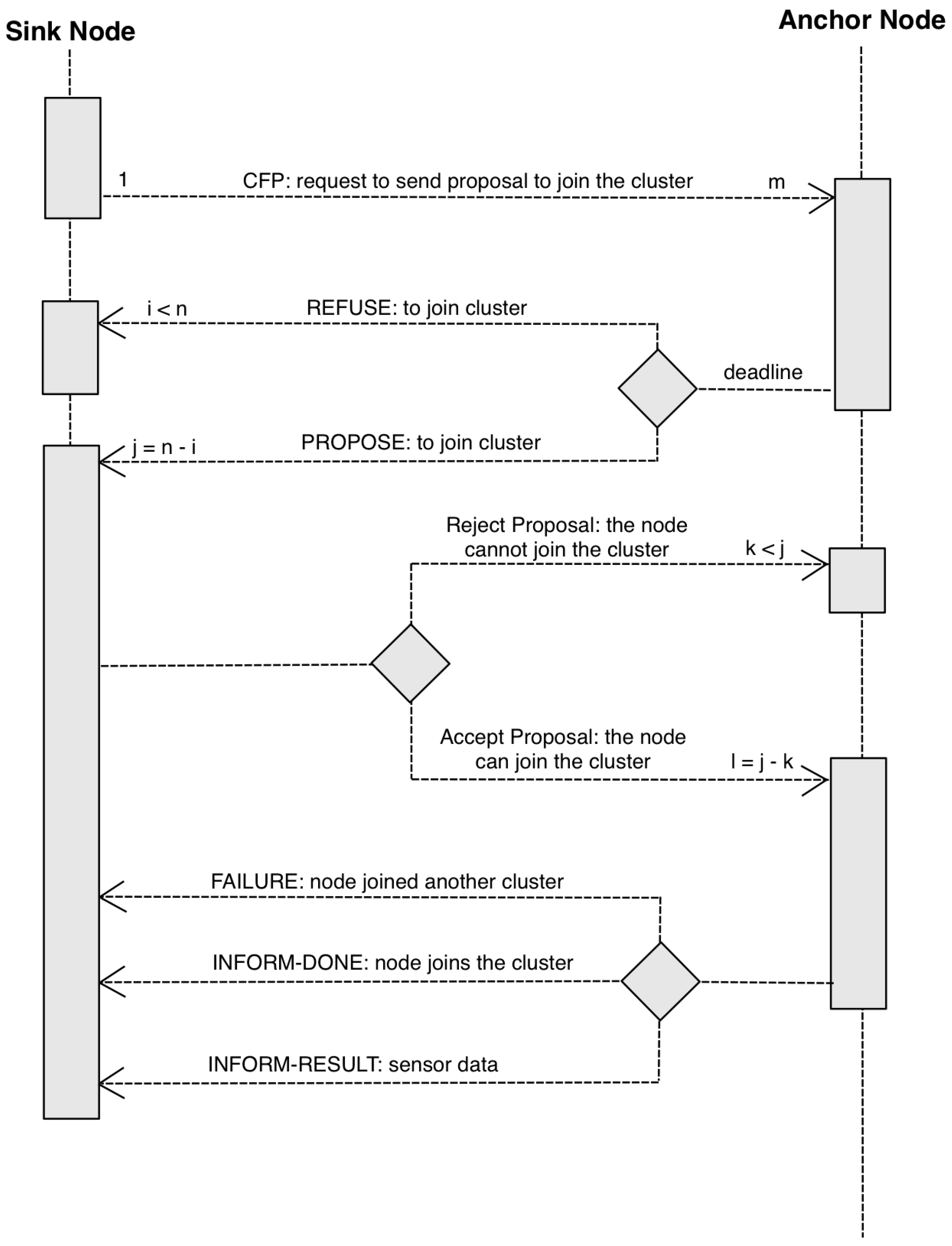
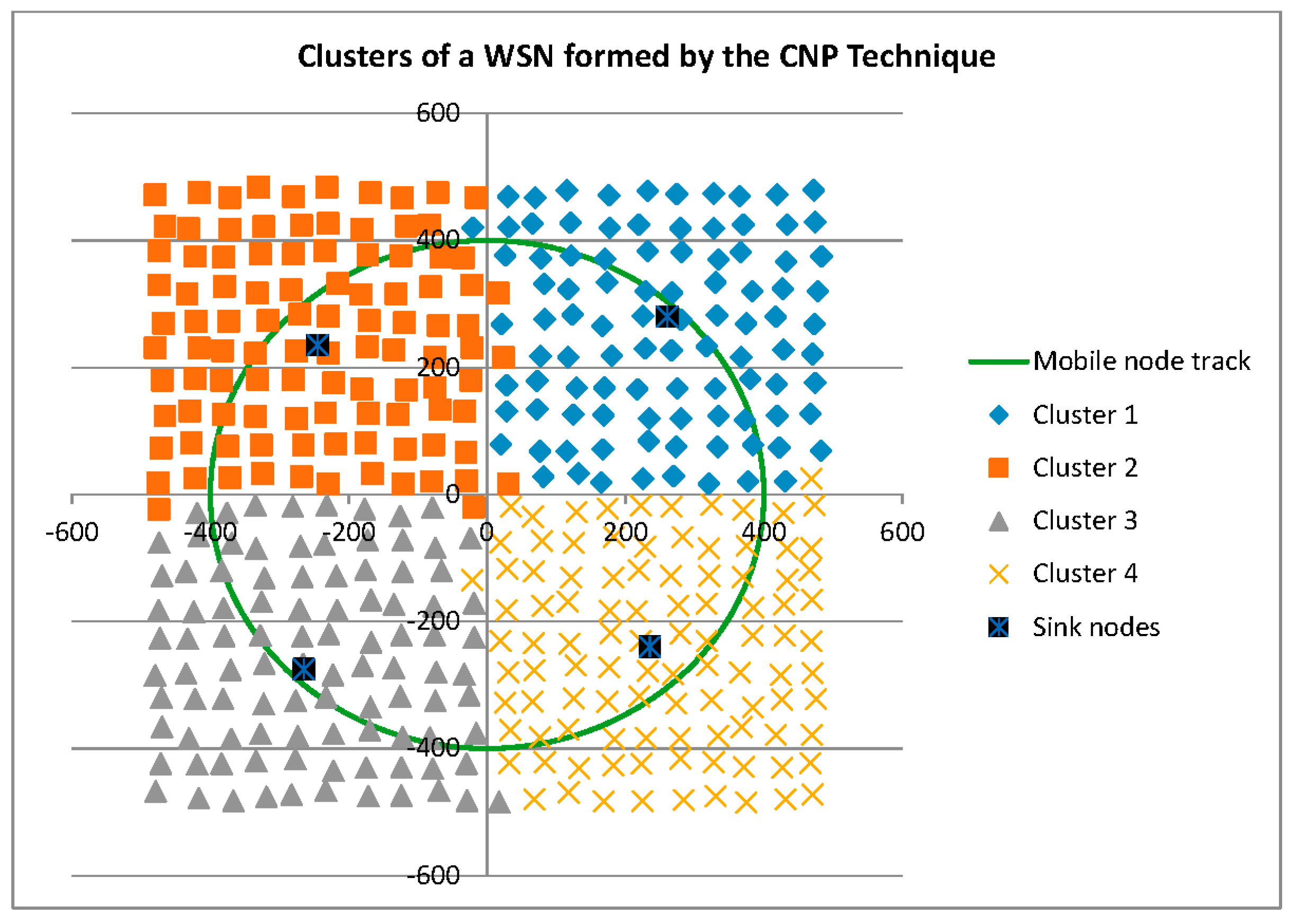
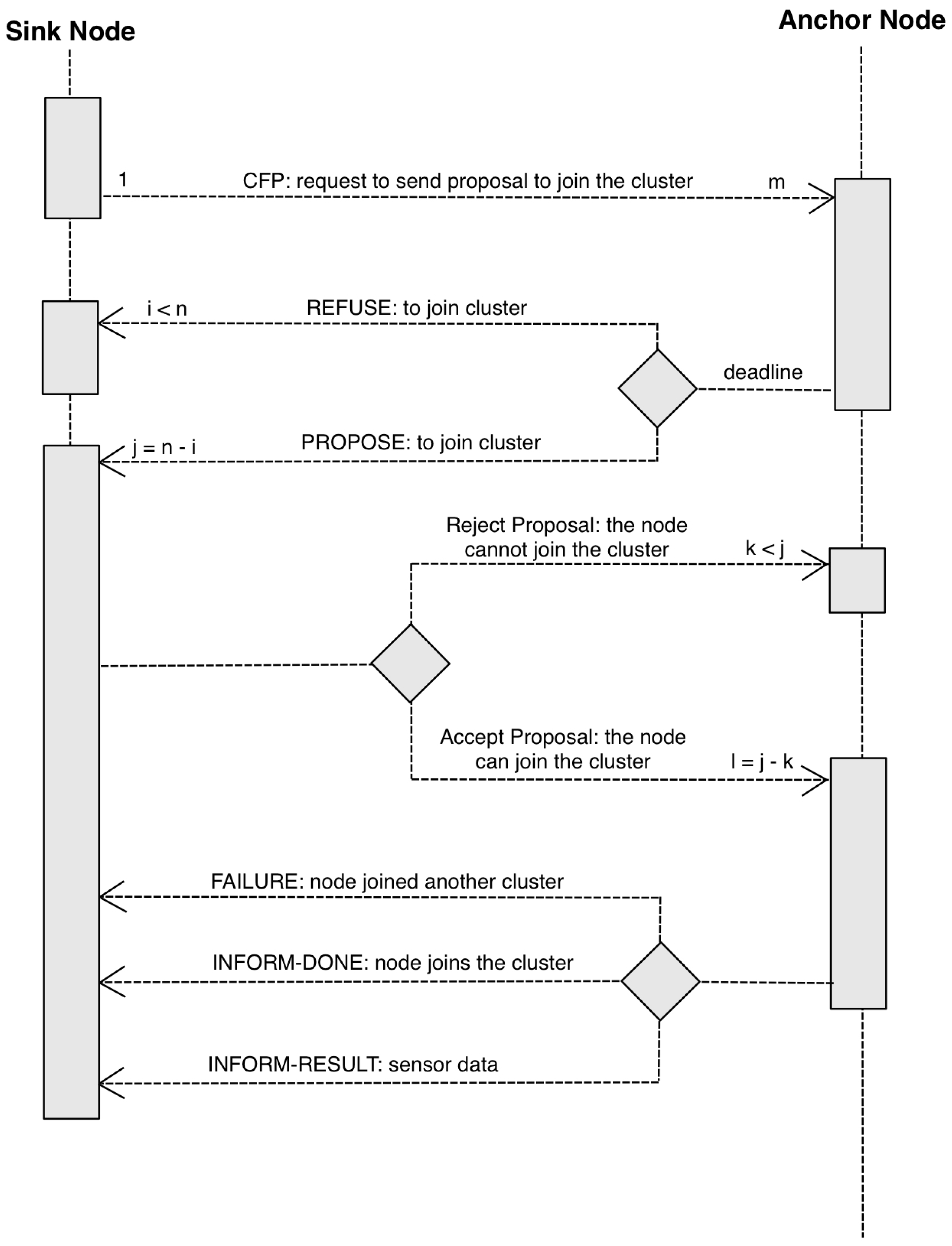
| Static | Contract Net Protocol (CNP) | Sink Node | Bidding initiate by Sink Node Agent |
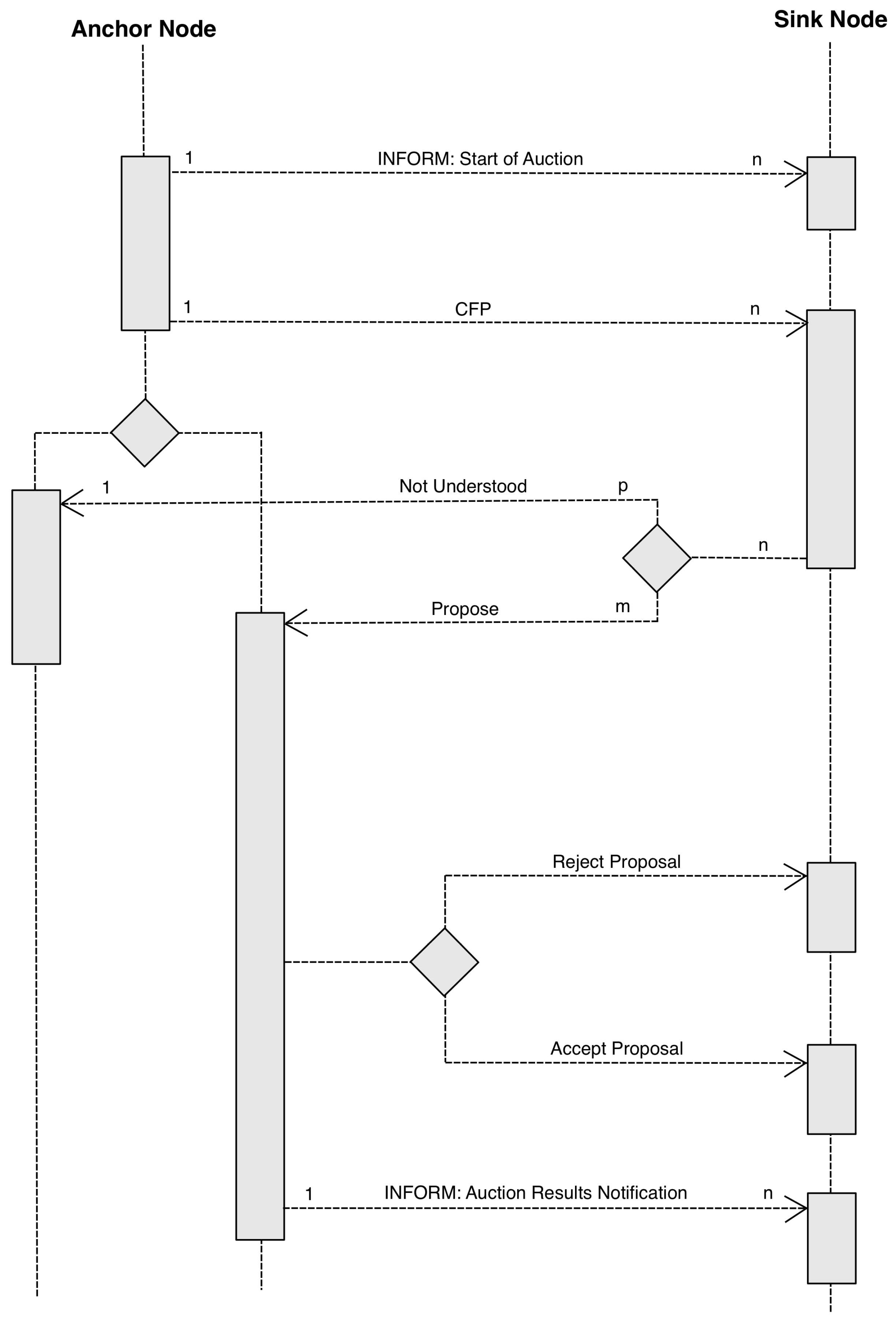
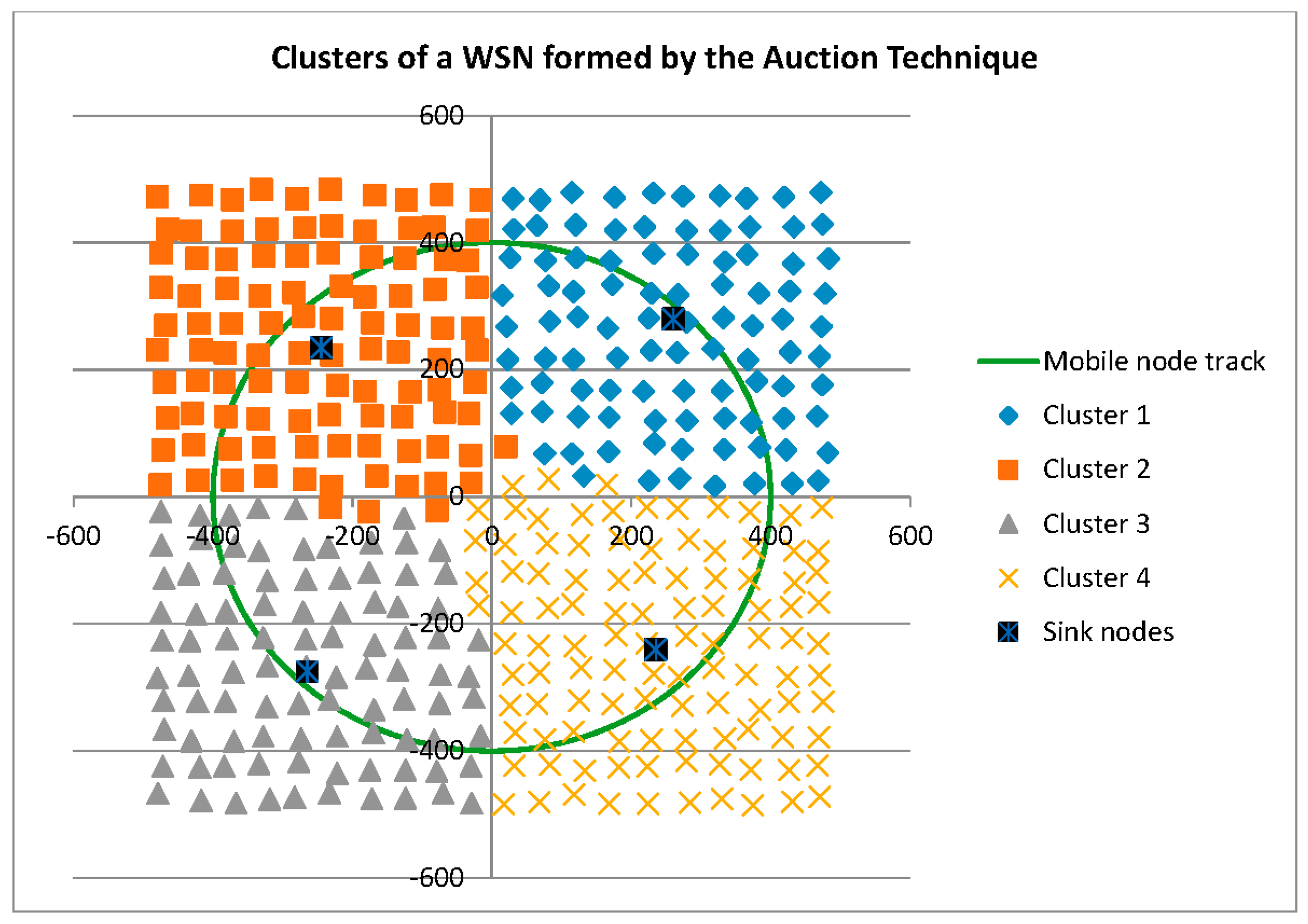
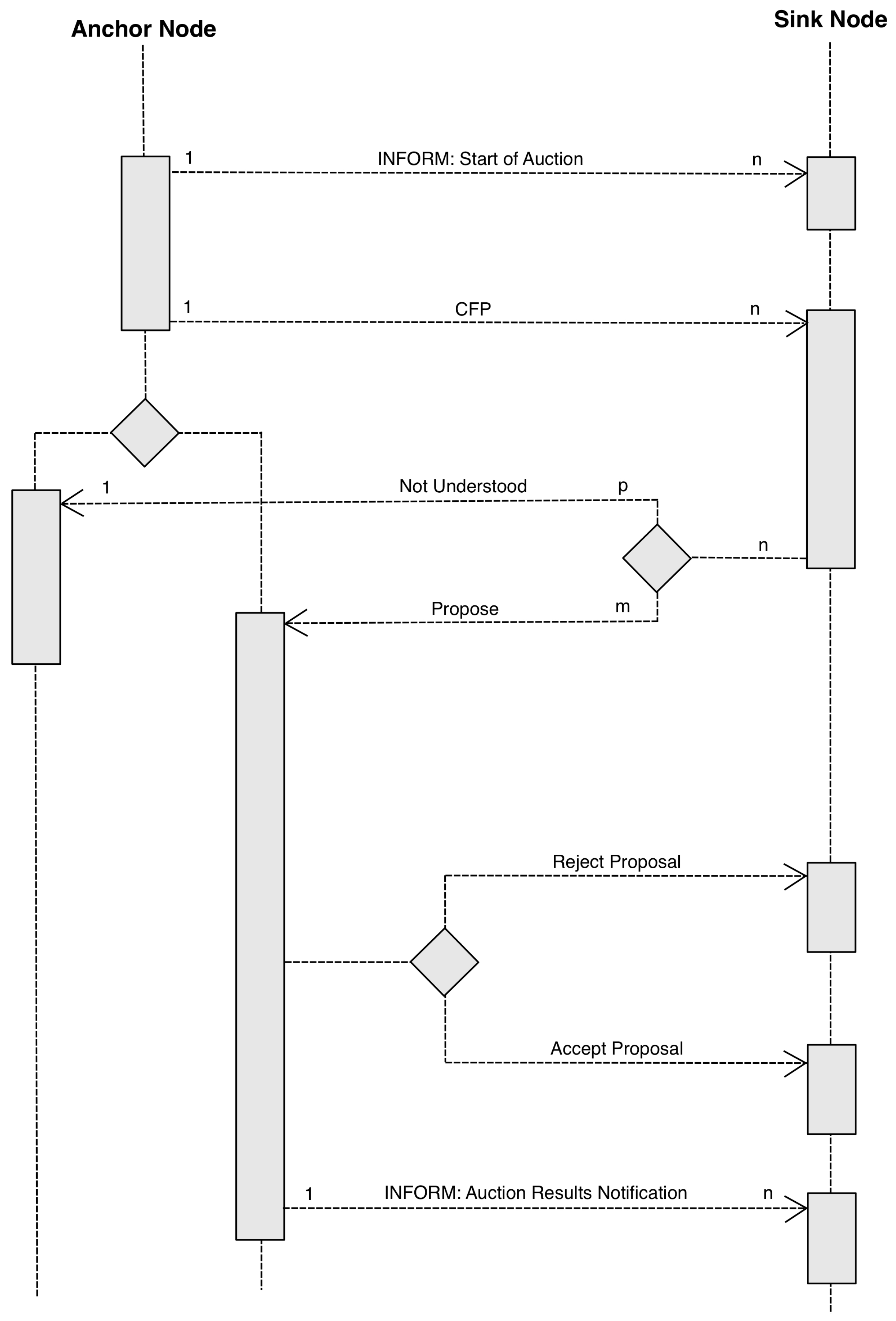
| Dynamic | Vickrey Auction | Sink Node | Bidding initiated by Anchor Node Agent |
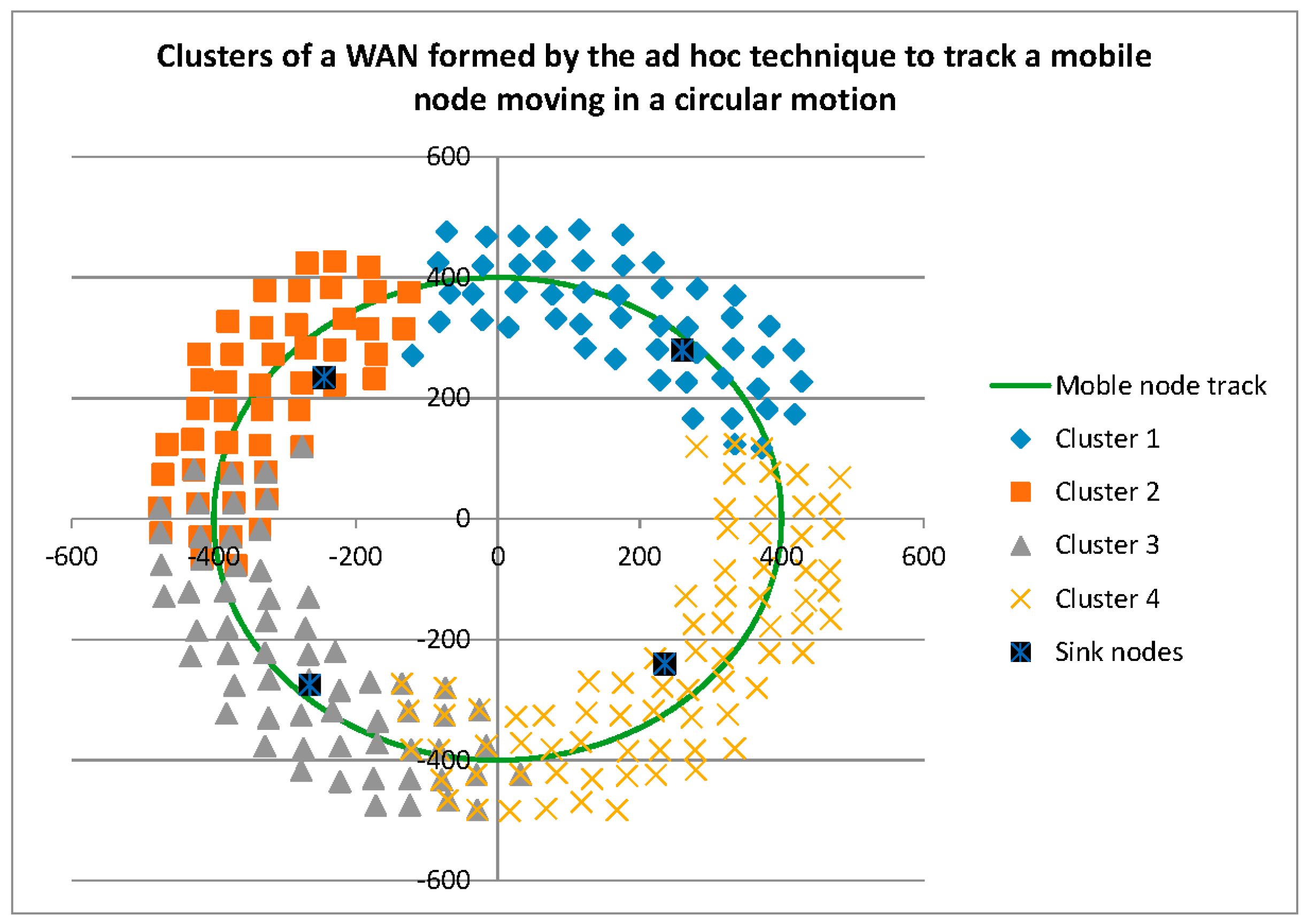
| Ad Hoc | Vickrey Auction | Sink Node | Bidding initiate by Sink Node Agent |
4. Experimental Section
4.1. Metrics
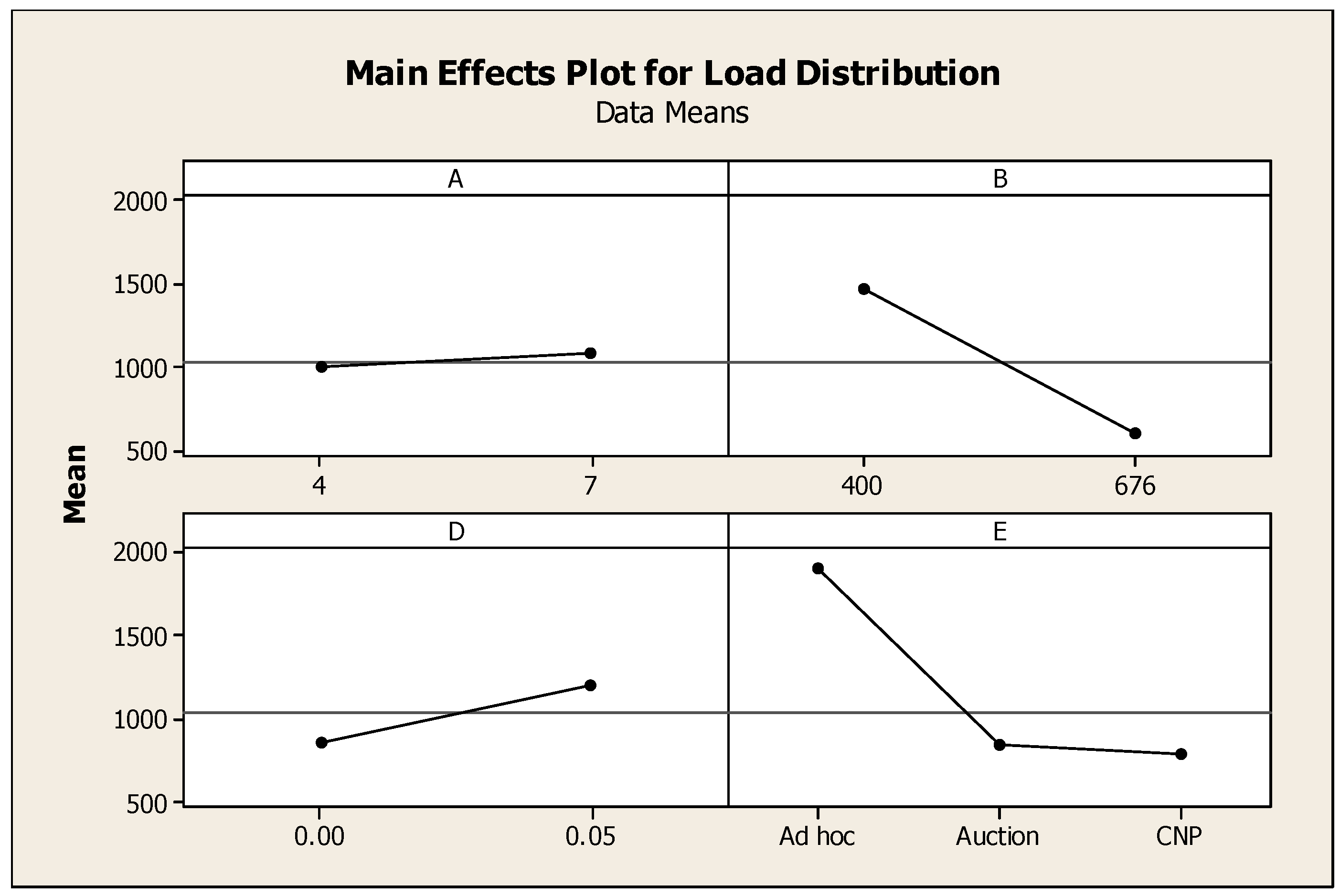
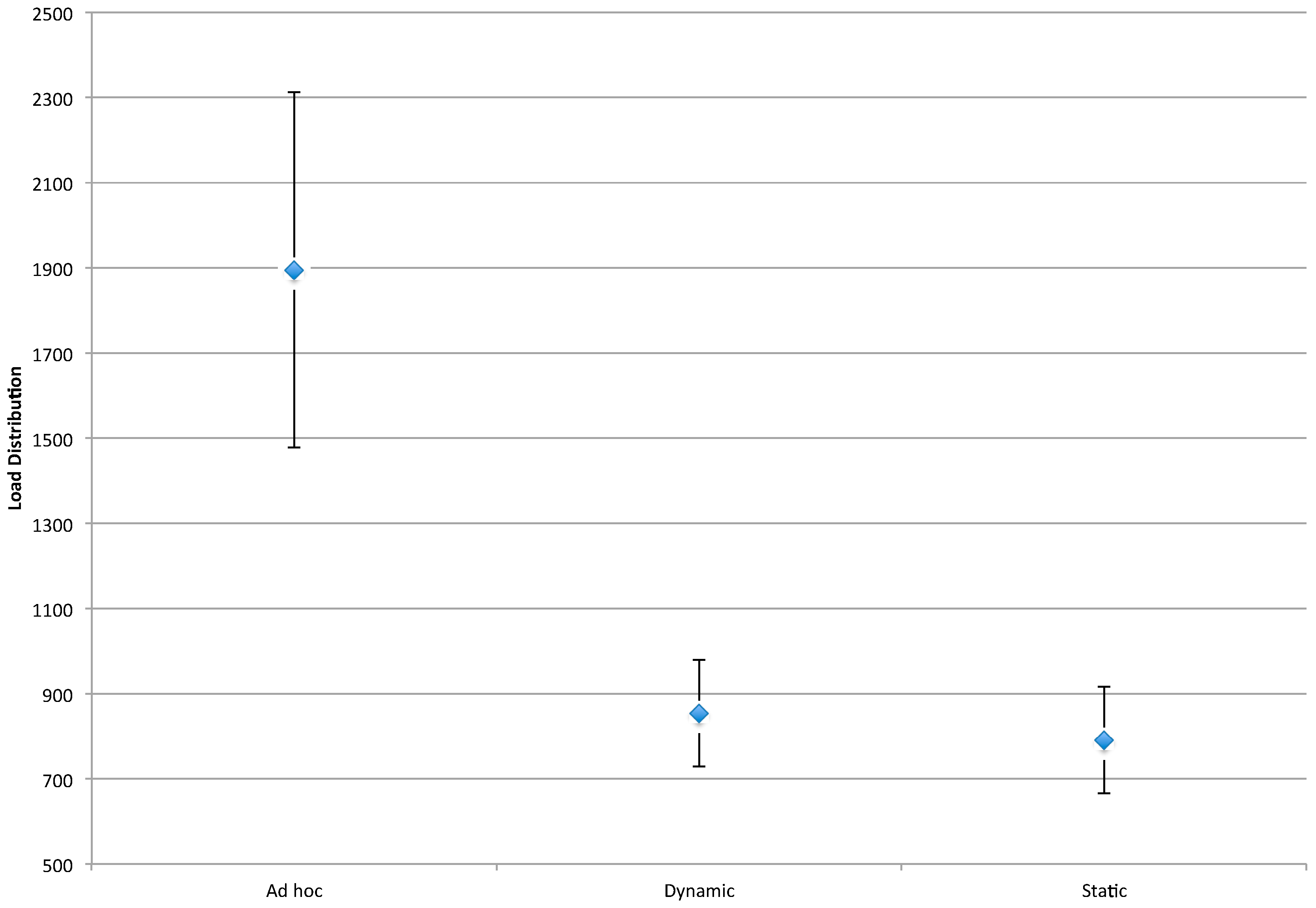
4.1.1. Load Distribution
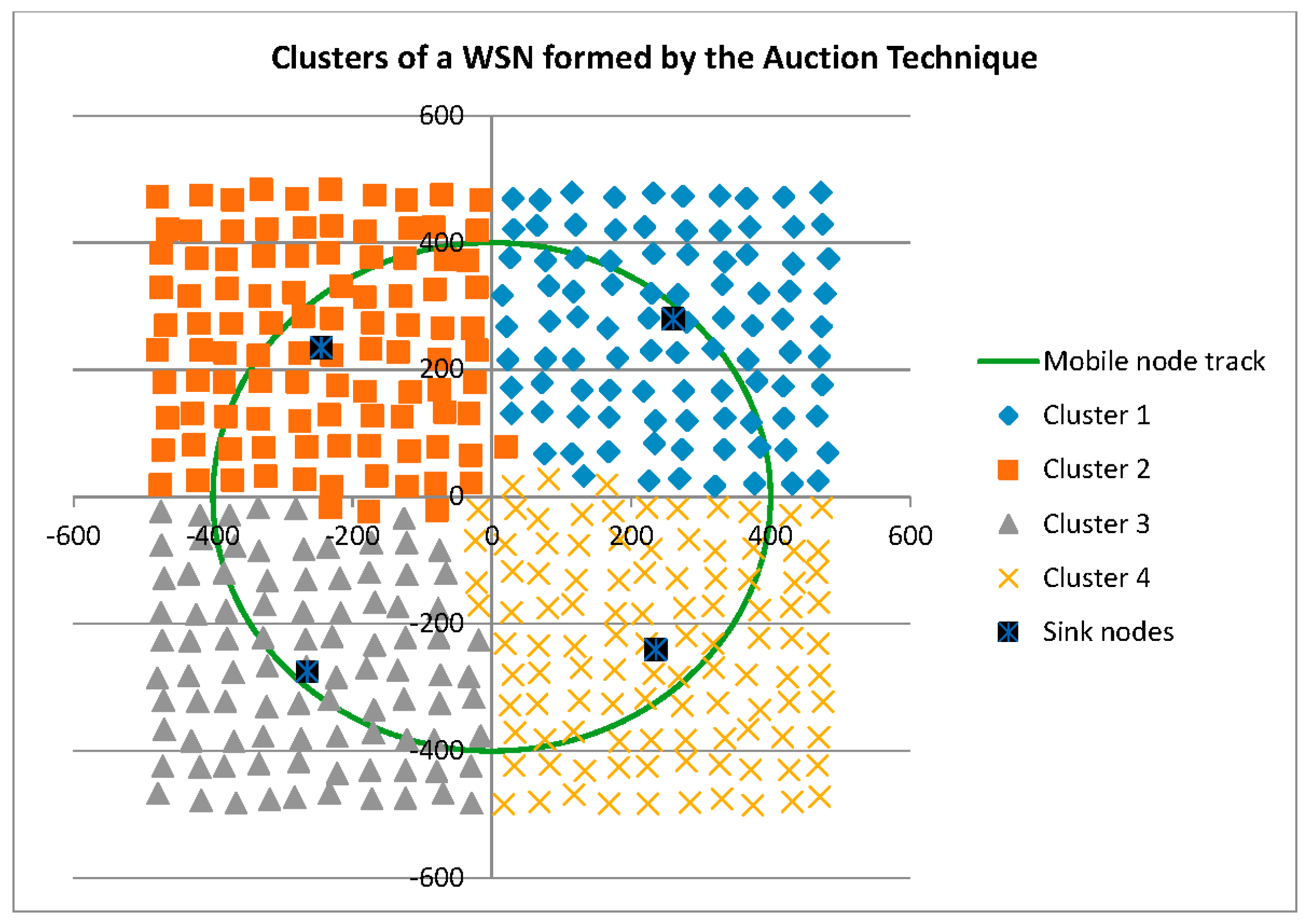
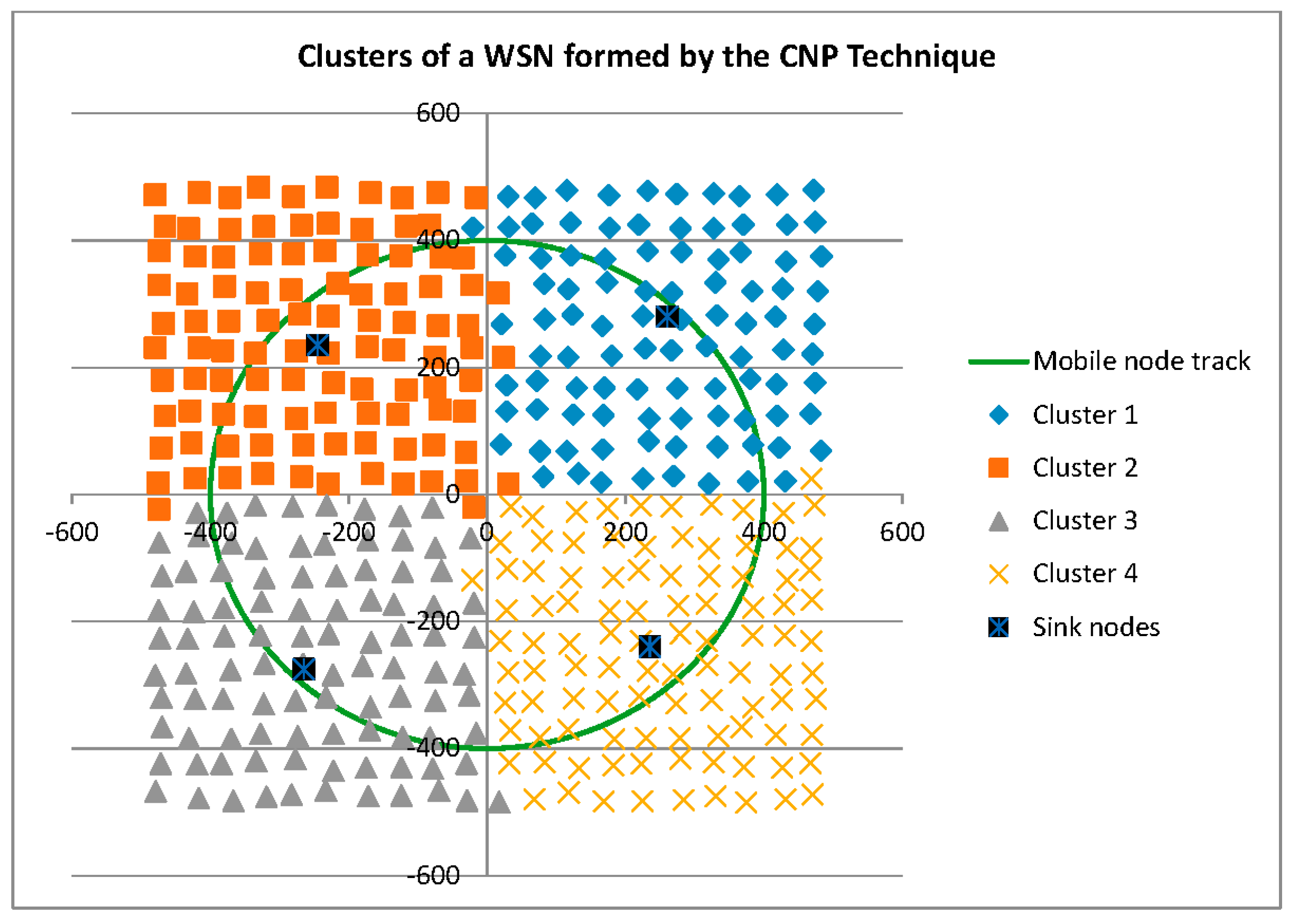
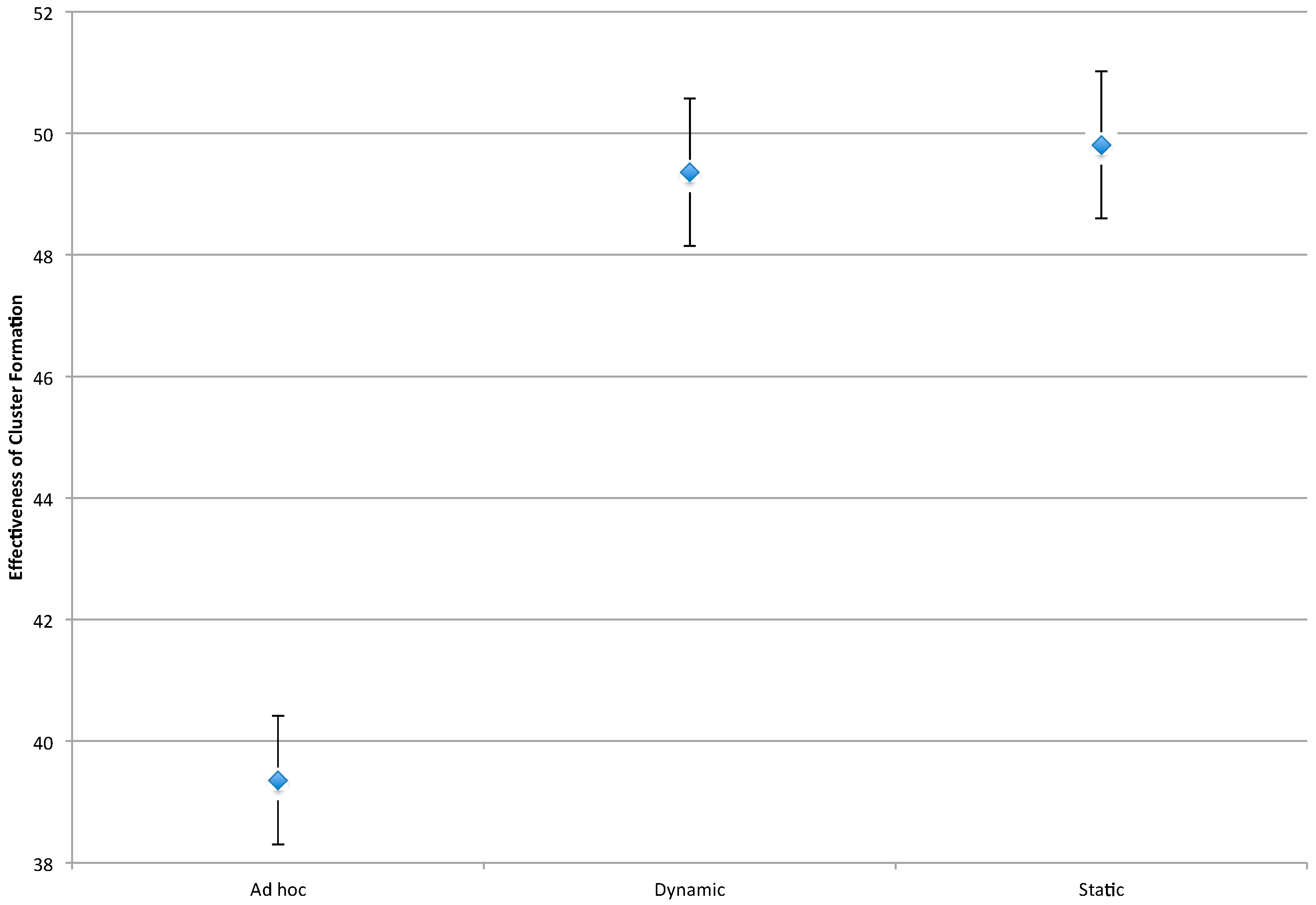
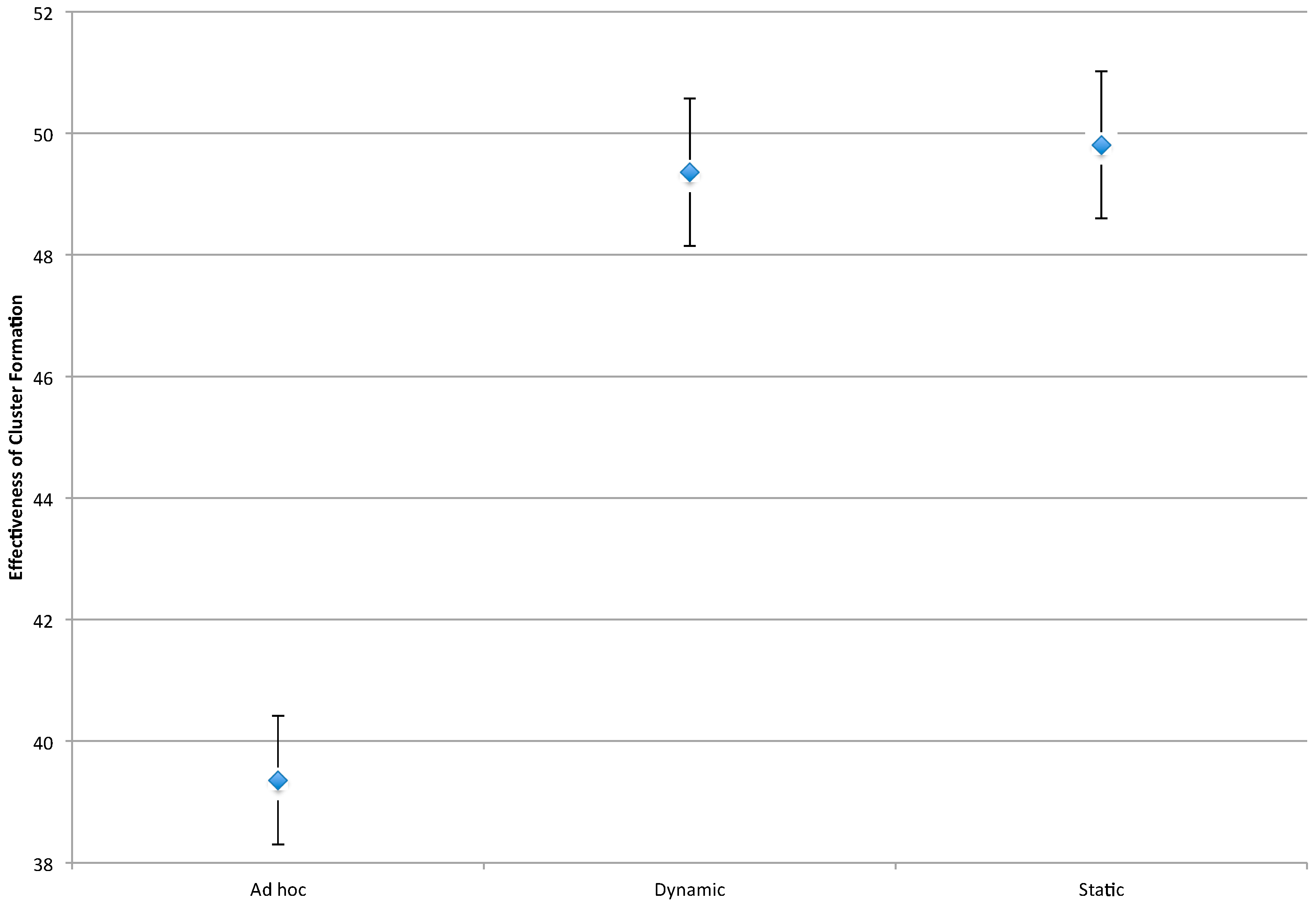
4.1.2. Effectiveness of the Cluster Formation Technique
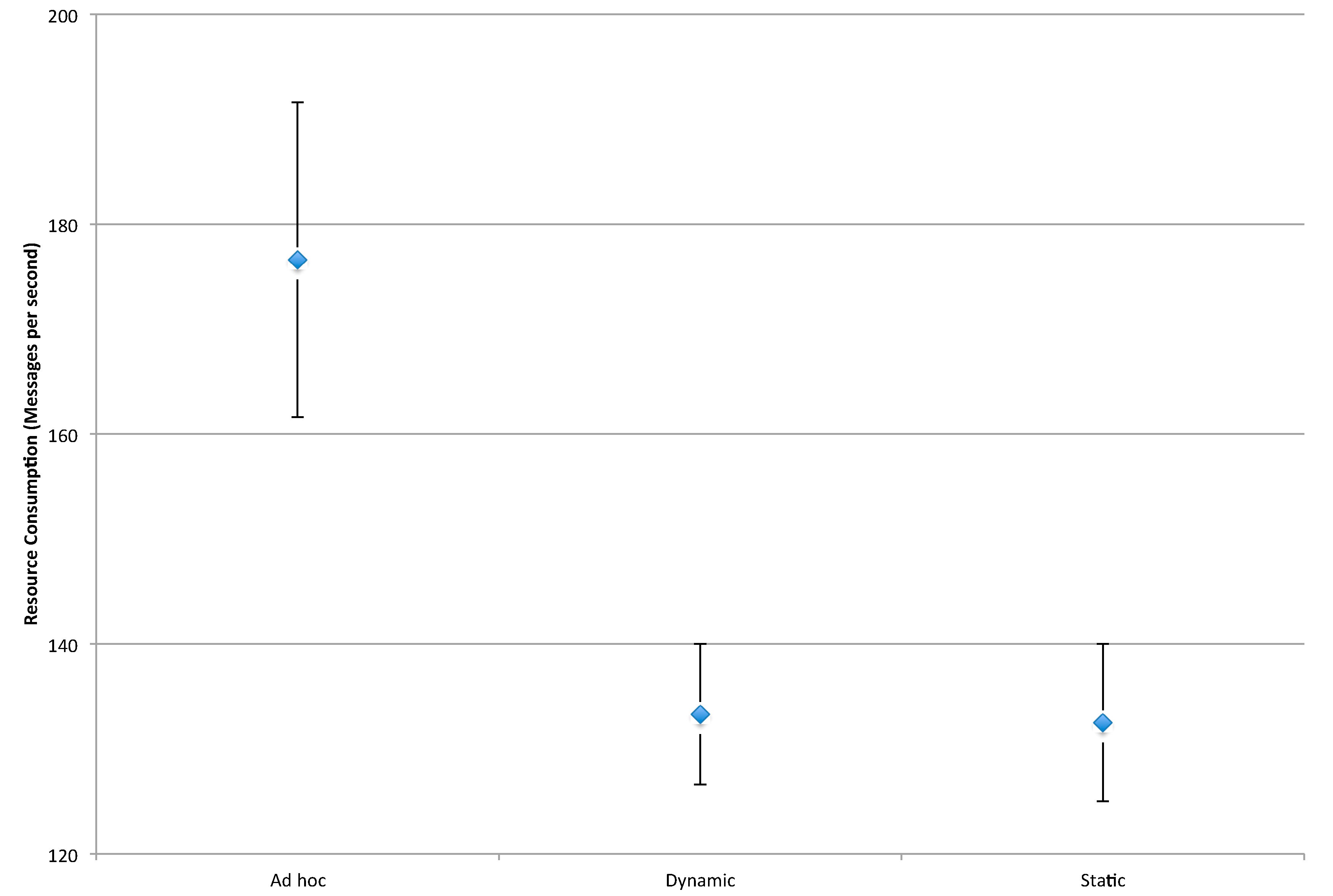
4.1.3. Resource Consumption
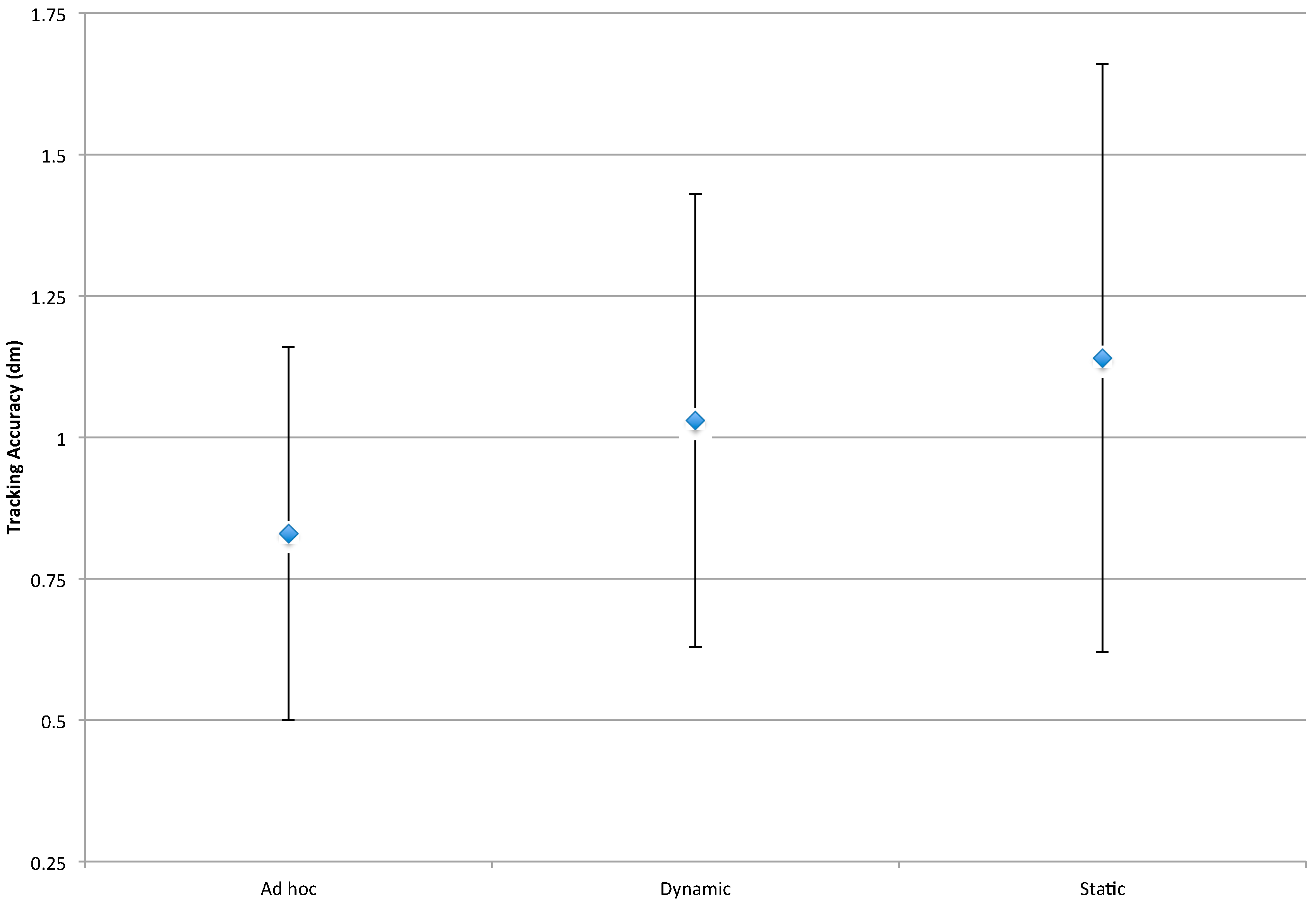
4.1.4. Tracking Accuracy
4.2. Experimental Design
| Factor | Levels | Description |
|---|---|---|
| No. Sink Nodes (A) | A1 | 4 |
| A2 | 7 | |
| No. Anchor Nodes (B) | B1 | 400 |
| B2 | 676 | |
| Signal blockage % (D) | D1 | 0% |
| D2 | 5% | |
| Cluster formation technique (E) | E1 | Ad hoc |
| E2 | Dynamic | |
| E3 | Static |
4.3. Experimental Results
| Metric | Significant at p < 0.05 | |||
|---|---|---|---|---|
| Number of Sink Nodes | Number of Anchor Nodes | Blockage | Cluster Formation Technique | |
| Load Distribution | No | Yes | Yes | Yes |
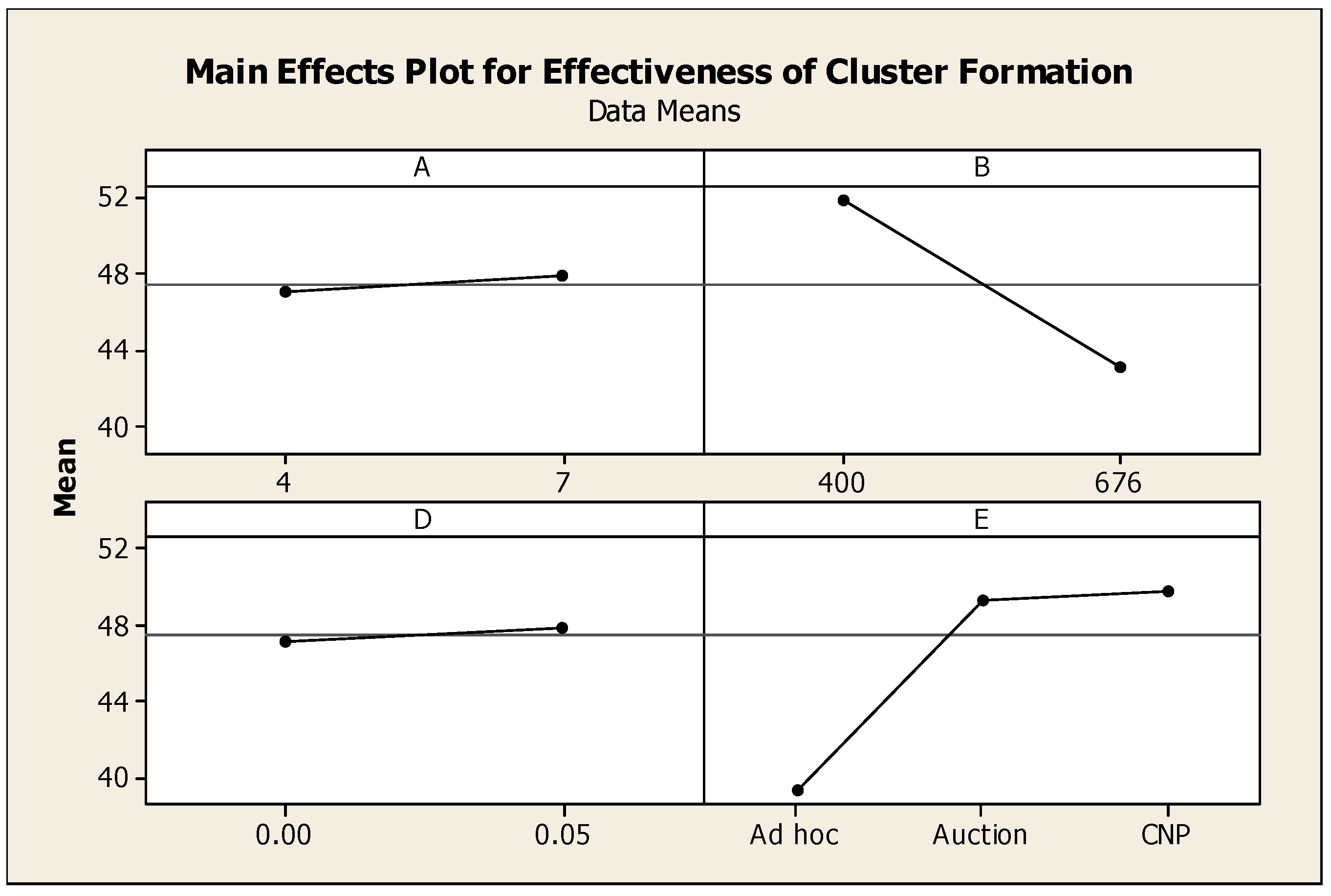
| Effectiveness | Yes | Yes | Yes | Yes |
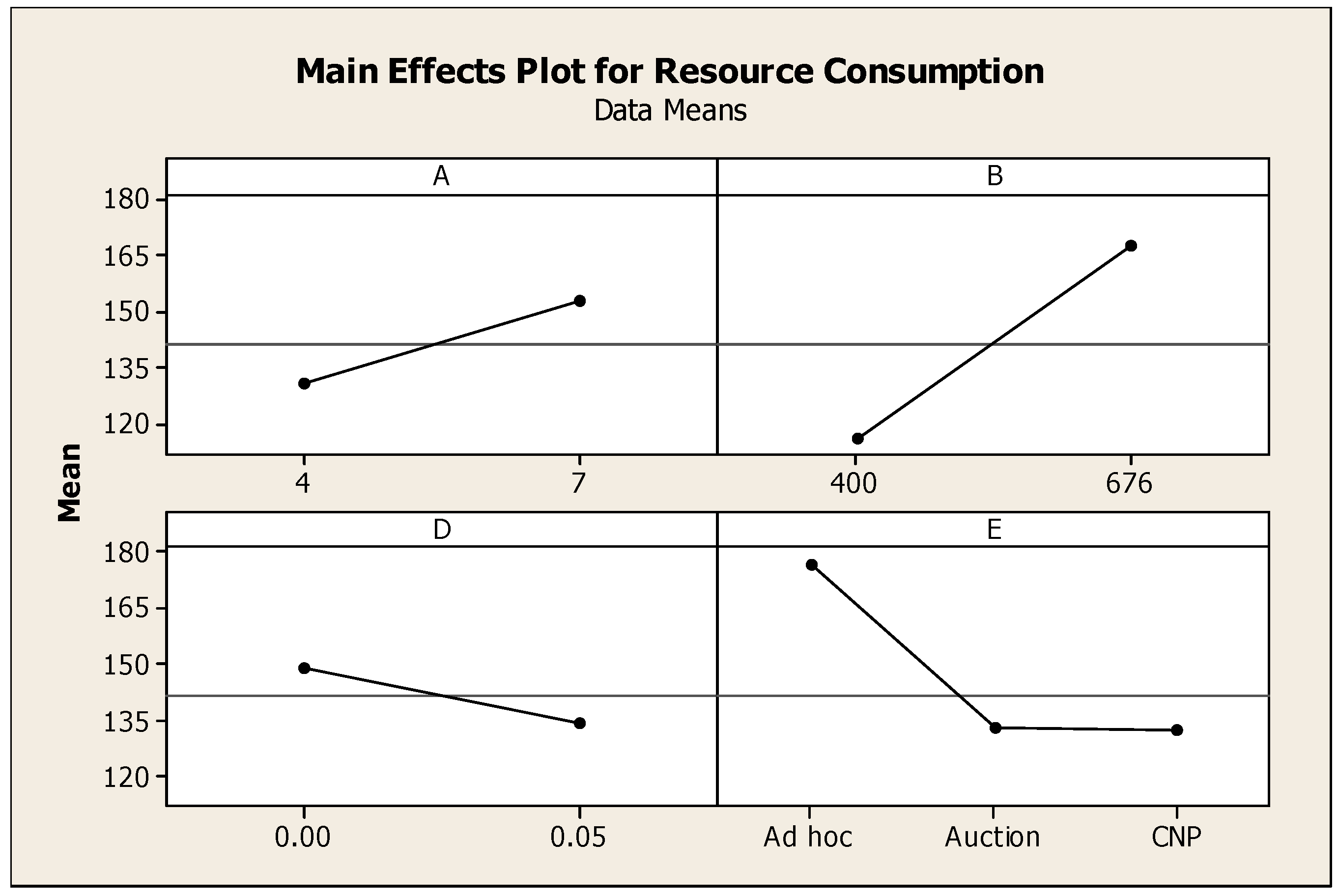
| Resource Consumption | Yes | Yes | Yes | Yes |
| Tracking Accuracy | Yes | No | No | Yes |
4.3.1. Load Distribution


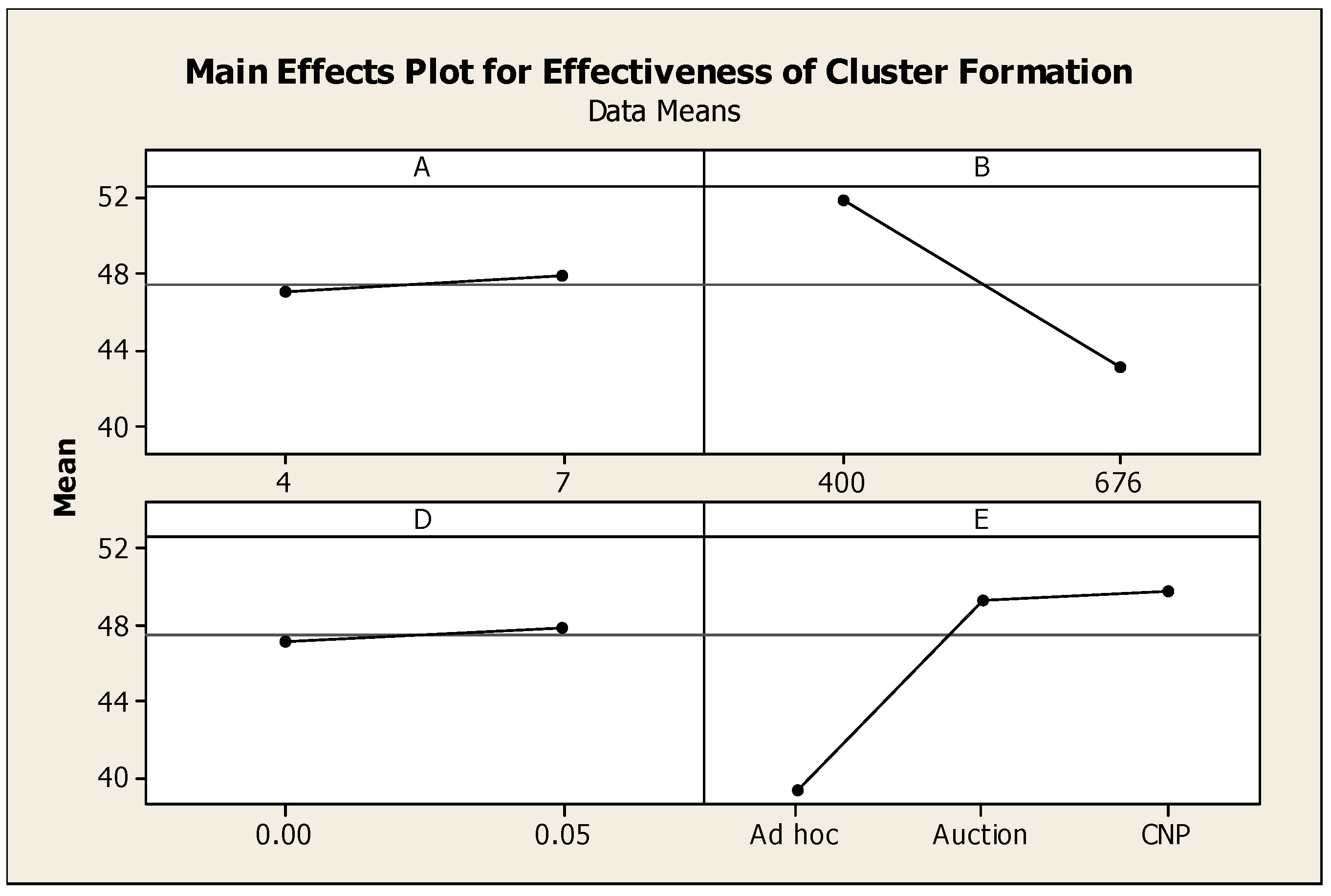
4.3.2. Effectiveness of the Cluster Formation Techniques
4.3.3. Resource Consumption


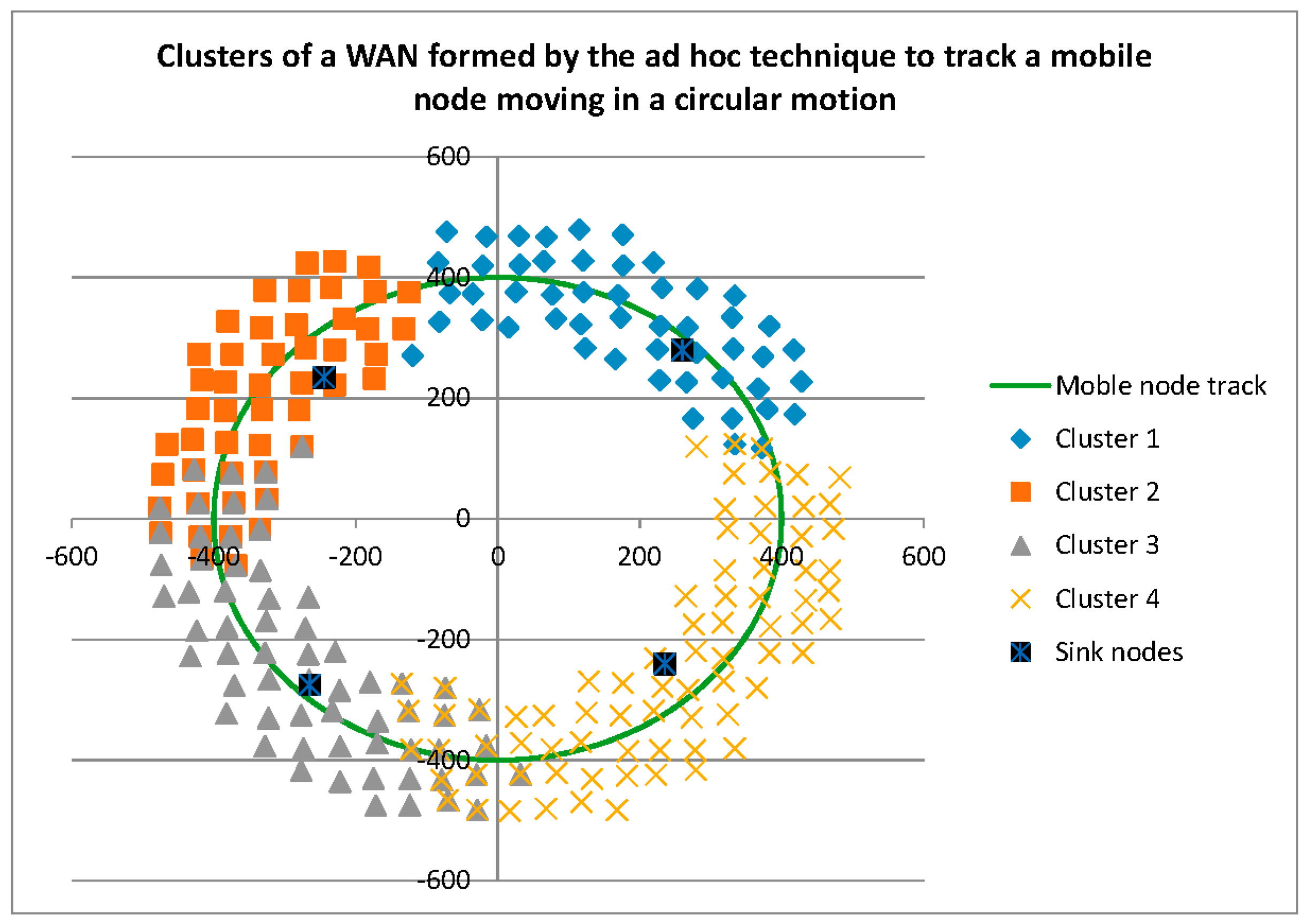
4.3.4. Tracking Accuracy

5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix. Pre-Defined Clustering Protocols
References
- Chong, C.-Y.; Kumar, S.P. Sensor networks: Evolution, opportunities, and challenges. Proc. IEEE 2003, 91, 1247–1256. [Google Scholar] [CrossRef]
- De Pellegrini, F.; Miorandi, D.; Vitturi, S.; Zanella, A. On the use of wireless networks at low level of factory automation systems. IEEE Trans. Ind. Inform. 2006, 2, 129–143. [Google Scholar] [CrossRef]
- Setchi, R.M.; Lagos, N. Reconfigurability and reconfigurable manufacturing systems—State-of-the-art review. In Proceedings of the 2nd International Conference on Industrial Informatics, Berlin, Germany, 26 June 2004.
- Zhang, Y.; Yang, L.T.; Chen, J. RFID and Sensor Networks—Architectures, Protocols, Security, and Integrations; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T.F. Range-free localization and its impact on large scale sensor networks. ACM Trans. Embed. Comput. Syst. 2005, 4, 877–906. [Google Scholar] [CrossRef]
- Xiao, Q. Range-Free and Range-Based Localization of Wireless Sensor Networks. Ph.D. Thesis, Department of Computing, Hong Kong Polytechnic University, Hong Kong, China, 2011. [Google Scholar]
- Patwari, N.; Ash, J.; Kyperountas, S.; Hero, A., III; Moses, R.; Correal, N. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Proc. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Gholami, M.; Brennan, R.W. Localization of industrial wireless sensor networks: An artificial neural network approach. In Proceedings of the 5th International Conference on Industrial Applications of Holonic and Multiagent Systems, Toulouse, France, 29–31 August 2011.
- Priyantha, N.B. The Cricket Indoor Localization System. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. [Google Scholar]
- Horling, B.; Mailler, R.; Lesser, V. A case study of organizational effects in a distributed sensor network. In Proceedings of the IEEE/WIC/ACM International Conference on Intelligent Agent Technology, Beijing, China, 20–24 September 2004.
- Bandyopadhyay, S.; Coyle, E.J. An energy efficient hierarchical clustering algorithm for wireless sensor networks. In Proceedings of the Joint Conference of the IEEE Computer and Communications Societies, Lafayette, IN, USA, 30 March–3 April 2003.
- Yu, M.; Leung, K.K.; Malvankar, A. A dynamic clustering and energy efficient routing technique for sensor networks. IEEE Trans. Wirel. Commun. 2007, 6, 3069–3079. [Google Scholar] [CrossRef]
- Sun, K.; Peng, P.; Ning, P. Secure Distributed Cluster Formation in Wireless Sensor Networks. In Proceedings of the Computer Security Applications Conference, ACSAC ’06, Miami Beach, FL, USA, 4–7 December 2006; pp. 131–140.
- Okabe, A.; Boots, B.; Sugihara, K.; Chiu, S.N. Spatial Tessellations—Concepts and Applications of Voronoi Diagrams, 2nd ed.; John Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Chen, W.P.; Hou, J.C.; Sha, L. Dynamic Clustering for Acoustic Target Tracking in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2004, 3, 258–271. [Google Scholar] [CrossRef]
- Boukerche, A.; Oliveira, H.A.B.F.; Nakamura, E.F.; Loureiro, A.A.F. A Voronoi approach for scalable and robust DV-Hop localization system for sensor networks. In Proceedings of the 16th International Conference on Computer Communications and Networks, Honolulu, HI, USA, 13–16 August 2007.
- Gholami, M.; Brennan, R.W. Dynamic Cluster Formation and Management in a Factory Wireless Sensor Network. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Manchester, UK, 13–16 October 2013; pp. 776–781.
- Savarese, C.; Rabaey, J.M.; Beutel, J. Location in distributed ad-hoc wireless sensor networks. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Salt Lake City, UT, USA, 7–11 May 2004; pp. 2037–2040.
- Basagni, S. Distributed clustering for ad hoc networks. In Proceedings of the Fourth International Symposium on Parallel Architectures, Algorithms, and Networks, I-SPAN ’99, Perth/Fremantle, WA, Australia, 23–25 June 1999; pp. 310–315.
- Gholami, M.; Taboun, M.; Brennan, R.W. Comparing Alternative Cluster Management Approaches for Mobile Node Tracking in a Factory Wireless Sensor Network. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014.
- Smith, R.G. The Contract Net Protocol: High-Level Communication and Control in a Distributed Problem Solver. IEEE Trans. Comput. 1980, C-29, 1104–1113. [Google Scholar] [CrossRef]
- Vickrey, W. Counterspeculation, Auctions, and Competitive Sealed Tenders. J. Financ. 1961, 16, 8–37. [Google Scholar] [CrossRef]
- Aloise, D.; Deshpande, A.; Hansen, P.; Popat, P. NP-hardness of Euclidean sum-of-squares clustering. Mach. Learn. 2009, 75, 245–248. [Google Scholar] [CrossRef]
- Xu, R.; Wunsch, D.C. Clustering; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Gholami, M.; Cai, N.; Brennan, R. Evaluating alternative approaches to mobile object localization in wireless sensor networks with passive architecture. Comput. Ind. 2012, 63, 941–947. [Google Scholar] [CrossRef]
- Montgomery, D.C. Design and Analysis of Experiments, 6th ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Bellifemine, F.; Caire, G.; Greenwood, D. Developing Multi-Agent Systems with JADE; John Wiley & Sons, Ltd.: Chichester, UK, 2007. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gholami, M.; Brennan, R.W. A Comparison of Alternative Distributed Dynamic Cluster Formation Techniques for Industrial Wireless Sensor Networks. Sensors 2016, 16, 65. https://doi.org/10.3390/s16010065
Gholami M, Brennan RW. A Comparison of Alternative Distributed Dynamic Cluster Formation Techniques for Industrial Wireless Sensor Networks. Sensors. 2016; 16(1):65. https://doi.org/10.3390/s16010065
Chicago/Turabian StyleGholami, Mohammad, and Robert W. Brennan. 2016. "A Comparison of Alternative Distributed Dynamic Cluster Formation Techniques for Industrial Wireless Sensor Networks" Sensors 16, no. 1: 65. https://doi.org/10.3390/s16010065