
Time-domain Statistics of the Electromagnetic Bias in GNSS-Reflectometry


Abstract
:
1. Introduction
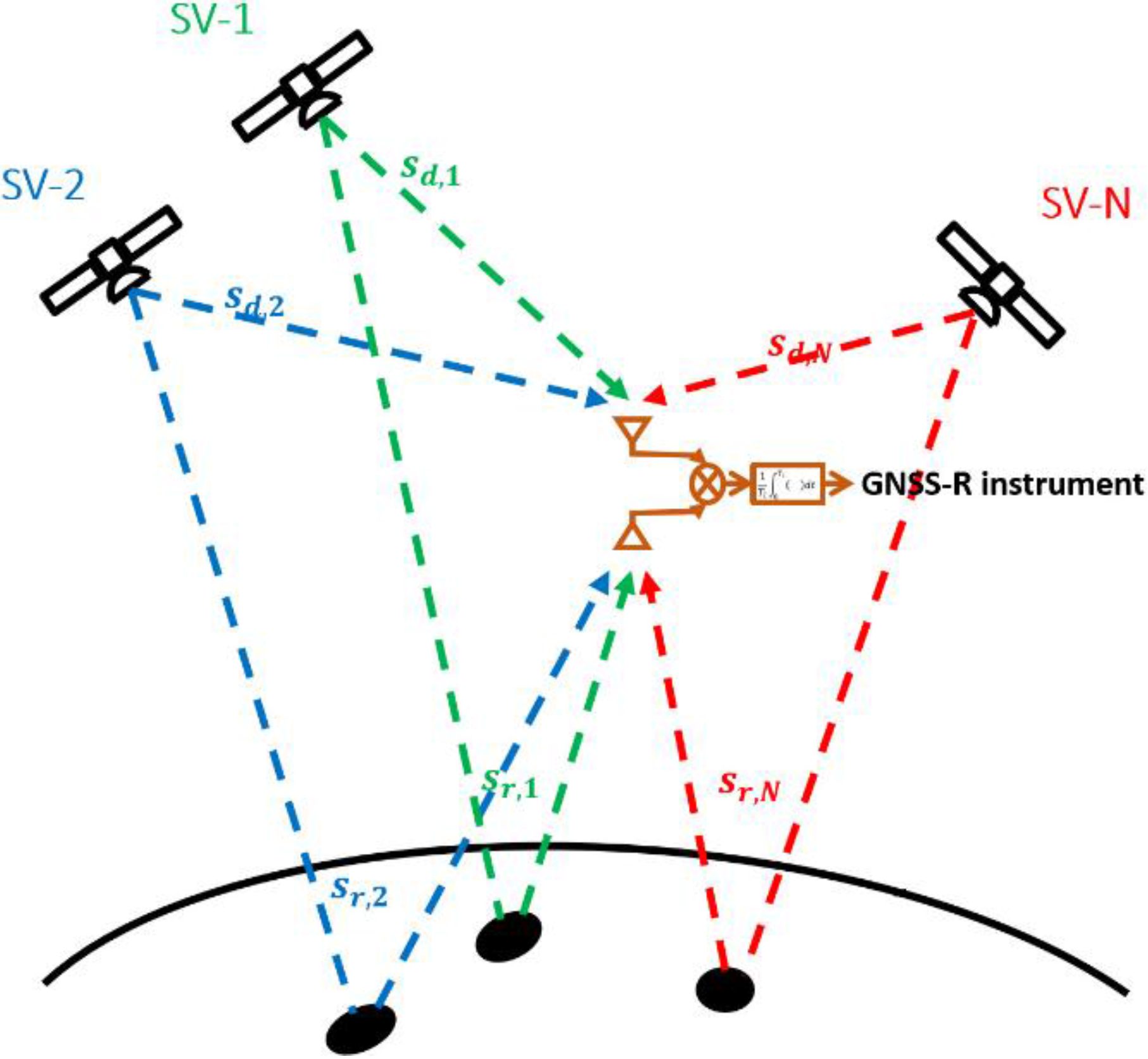
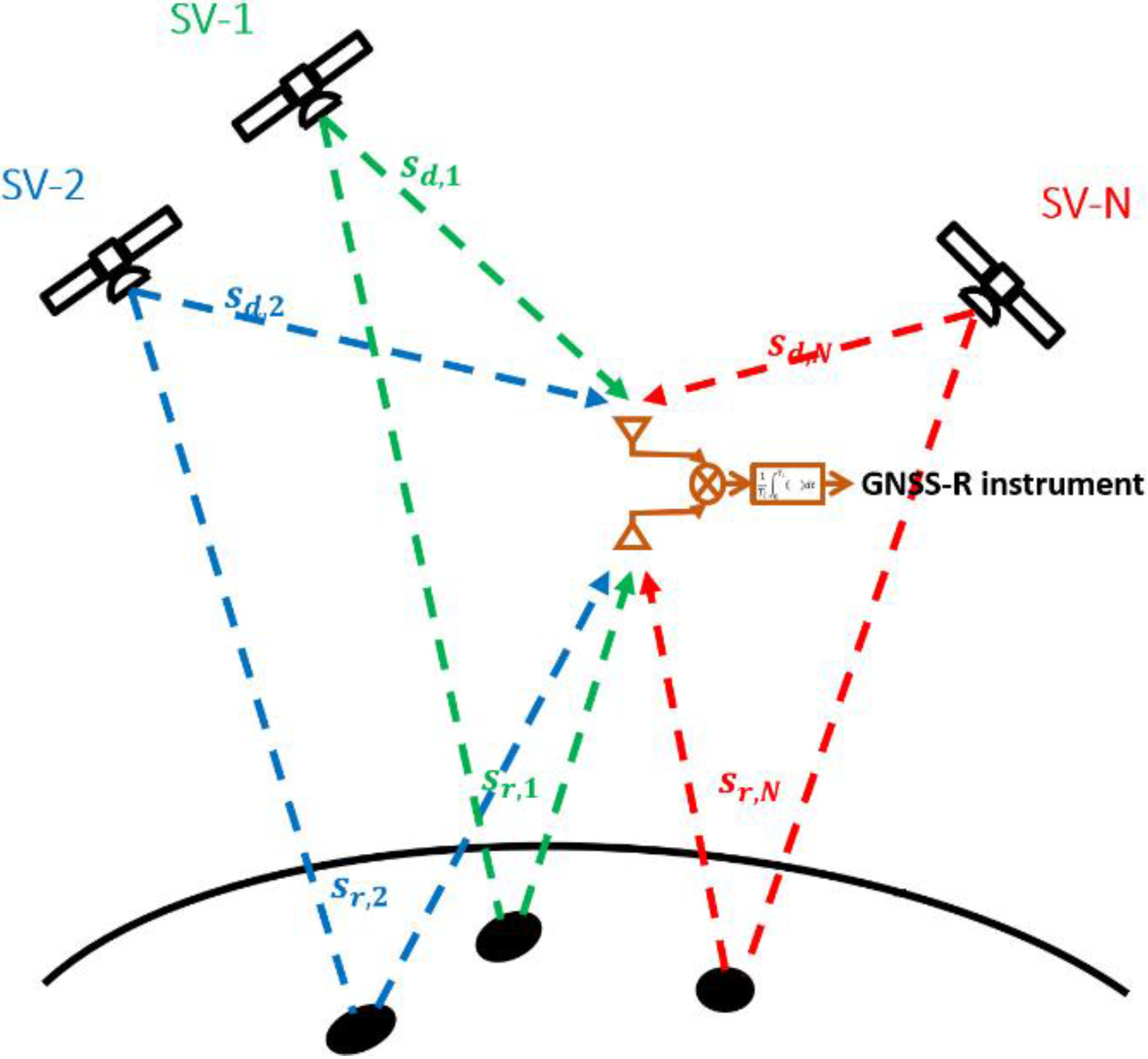
2. Methodology: EM Bias Estimation in Off-Nadir Configuration
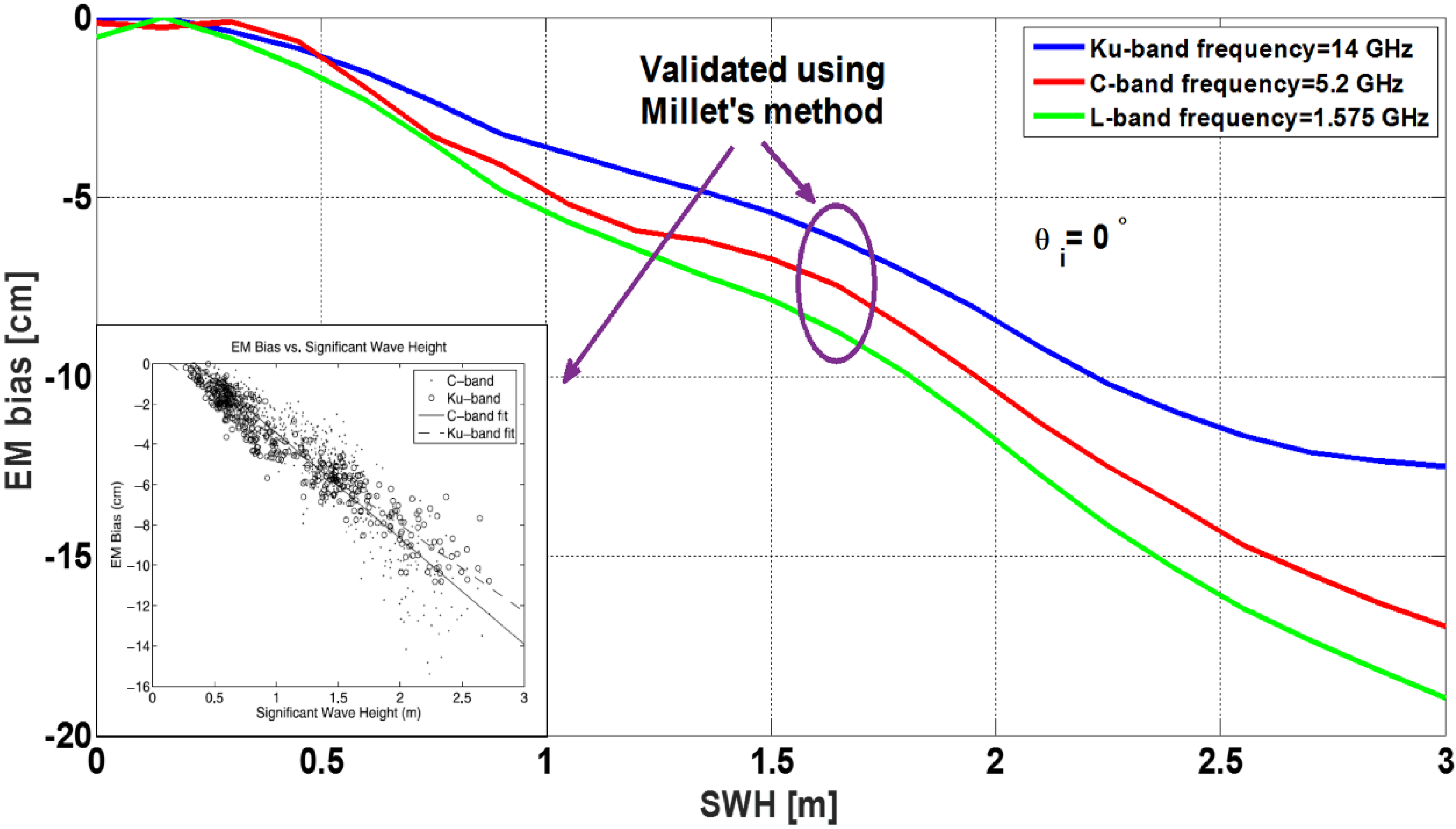
2.1. Implementation of Conventional Altimetry EM Bias Estimation Model at L-Band for GNSS-R
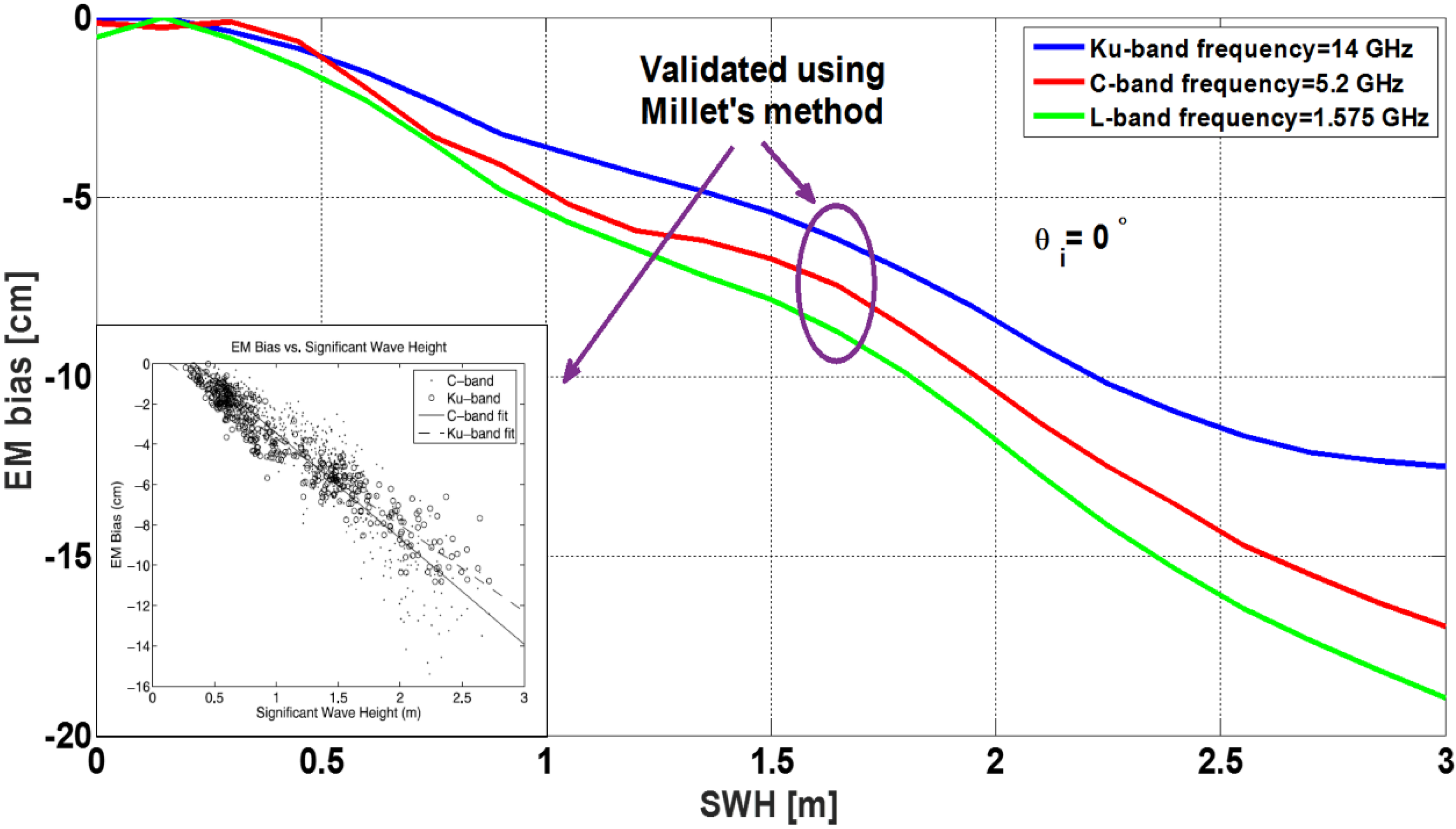
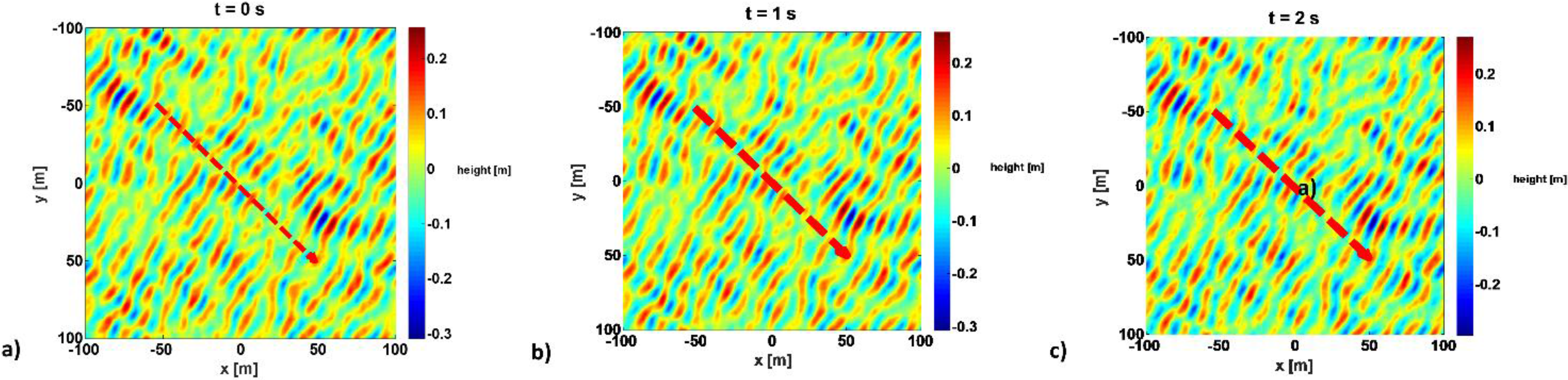
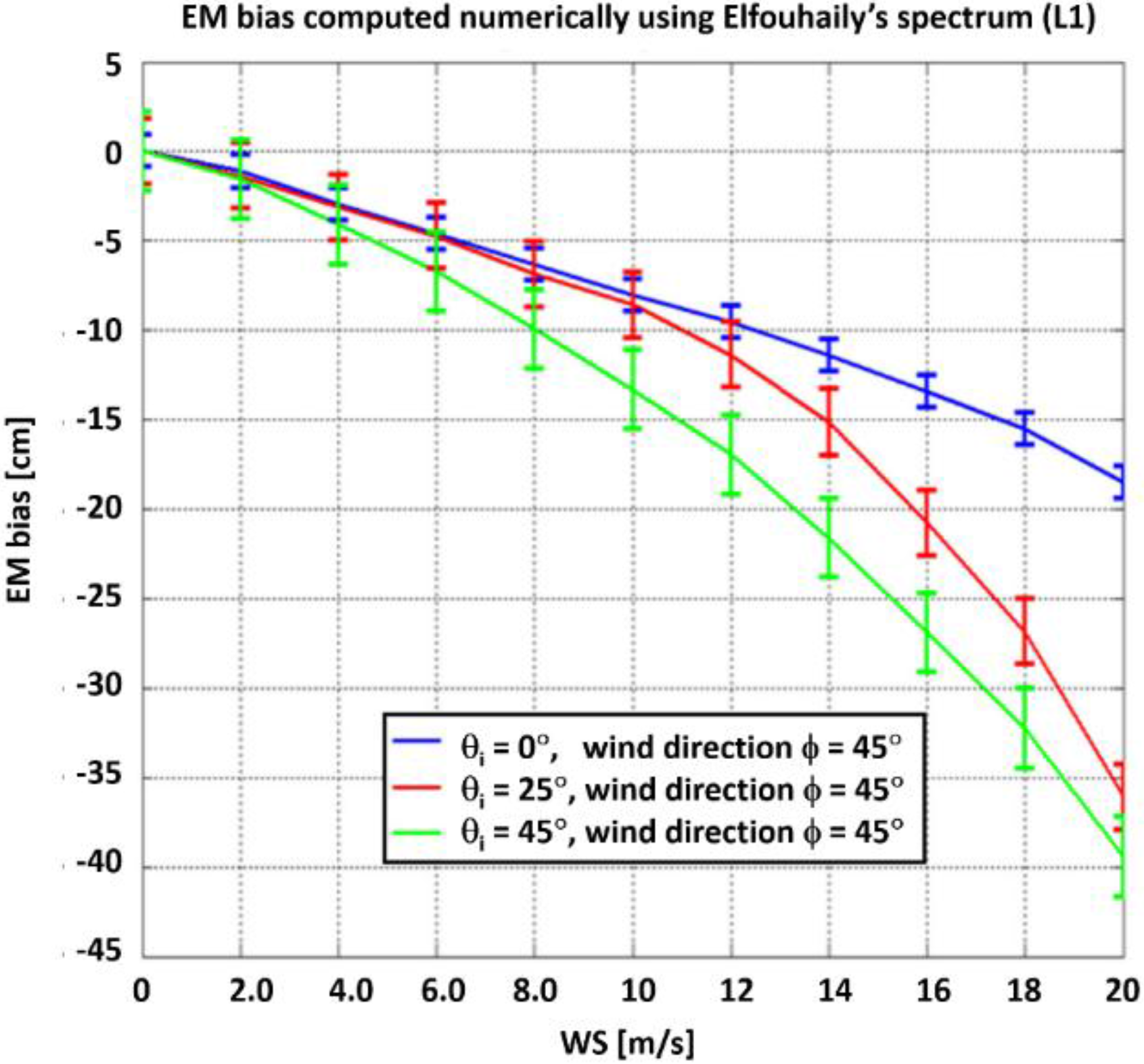
2.2. Numerical Computation of the EM Bias

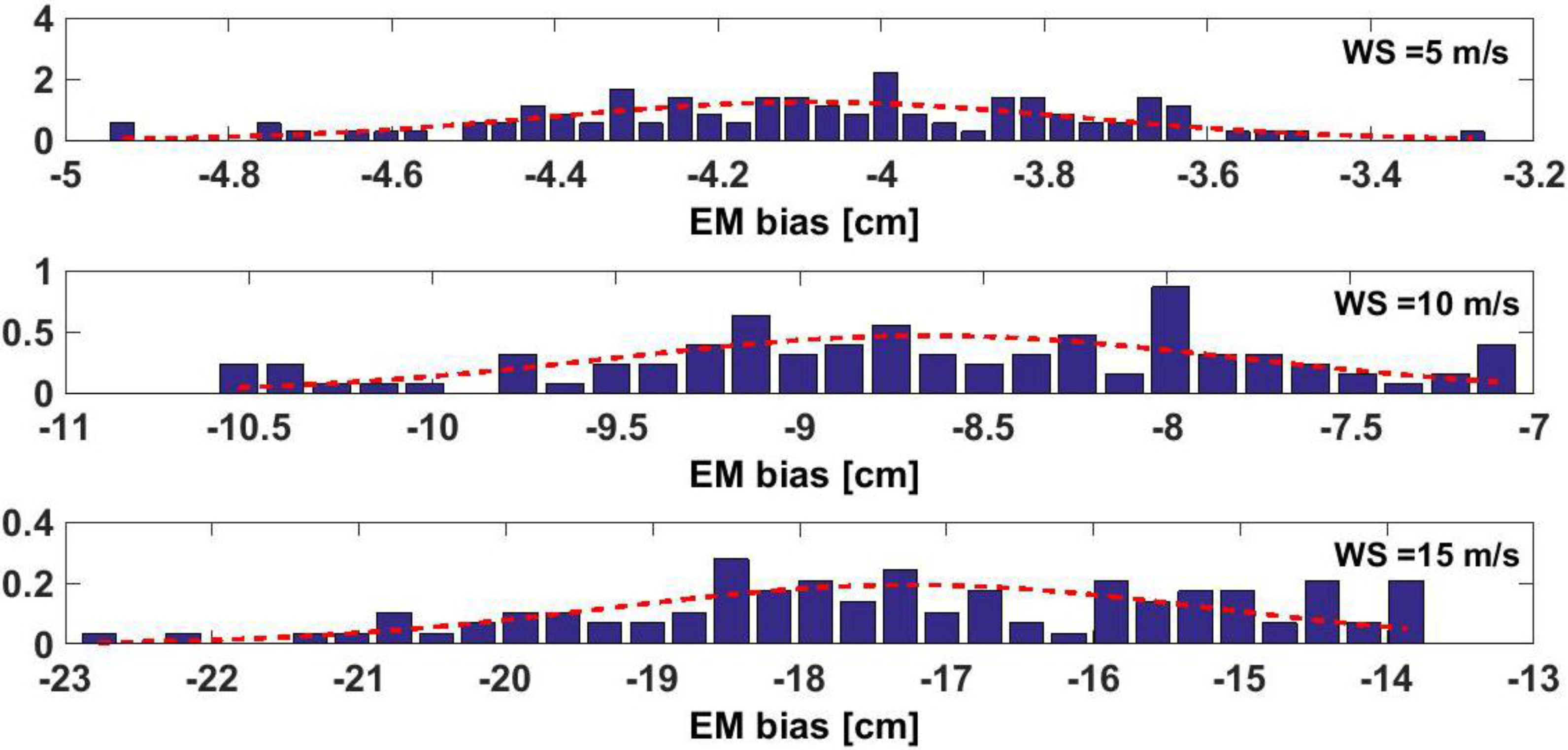
3. Results: Statistical Study of the Time-domain EM Bias
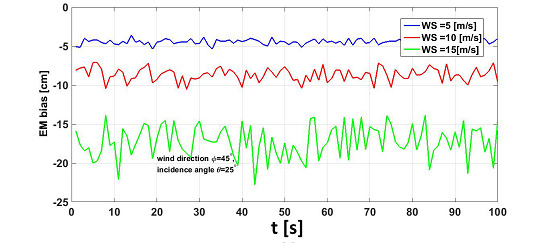
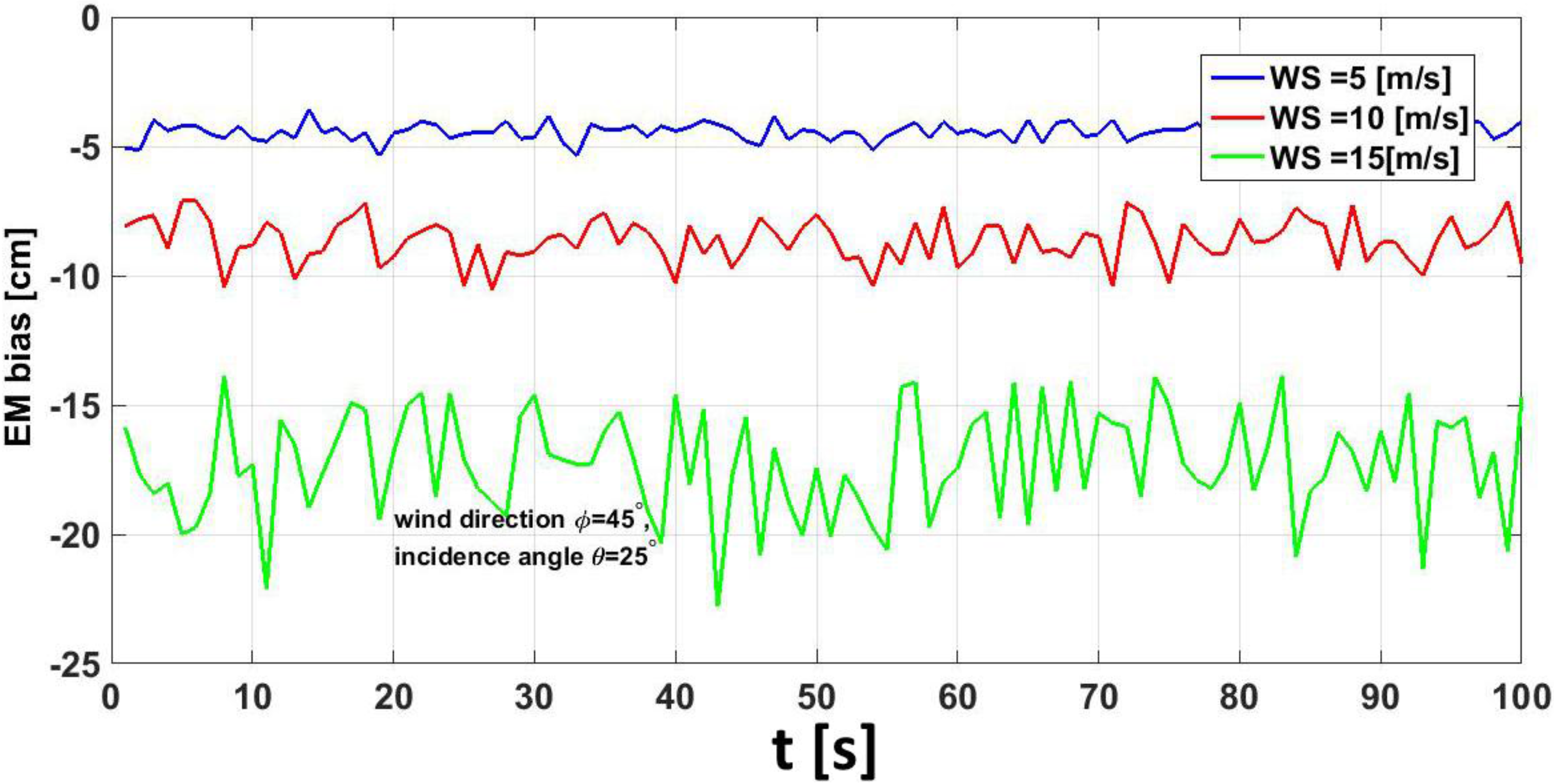
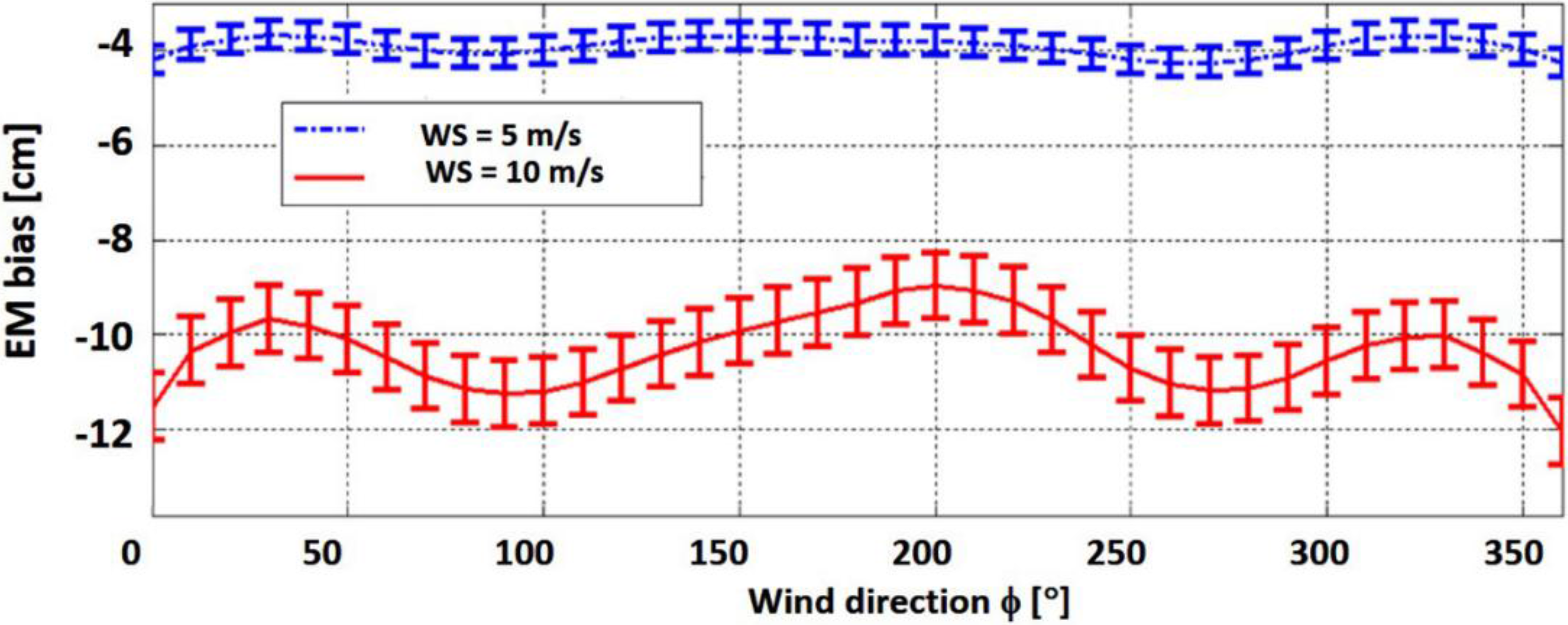
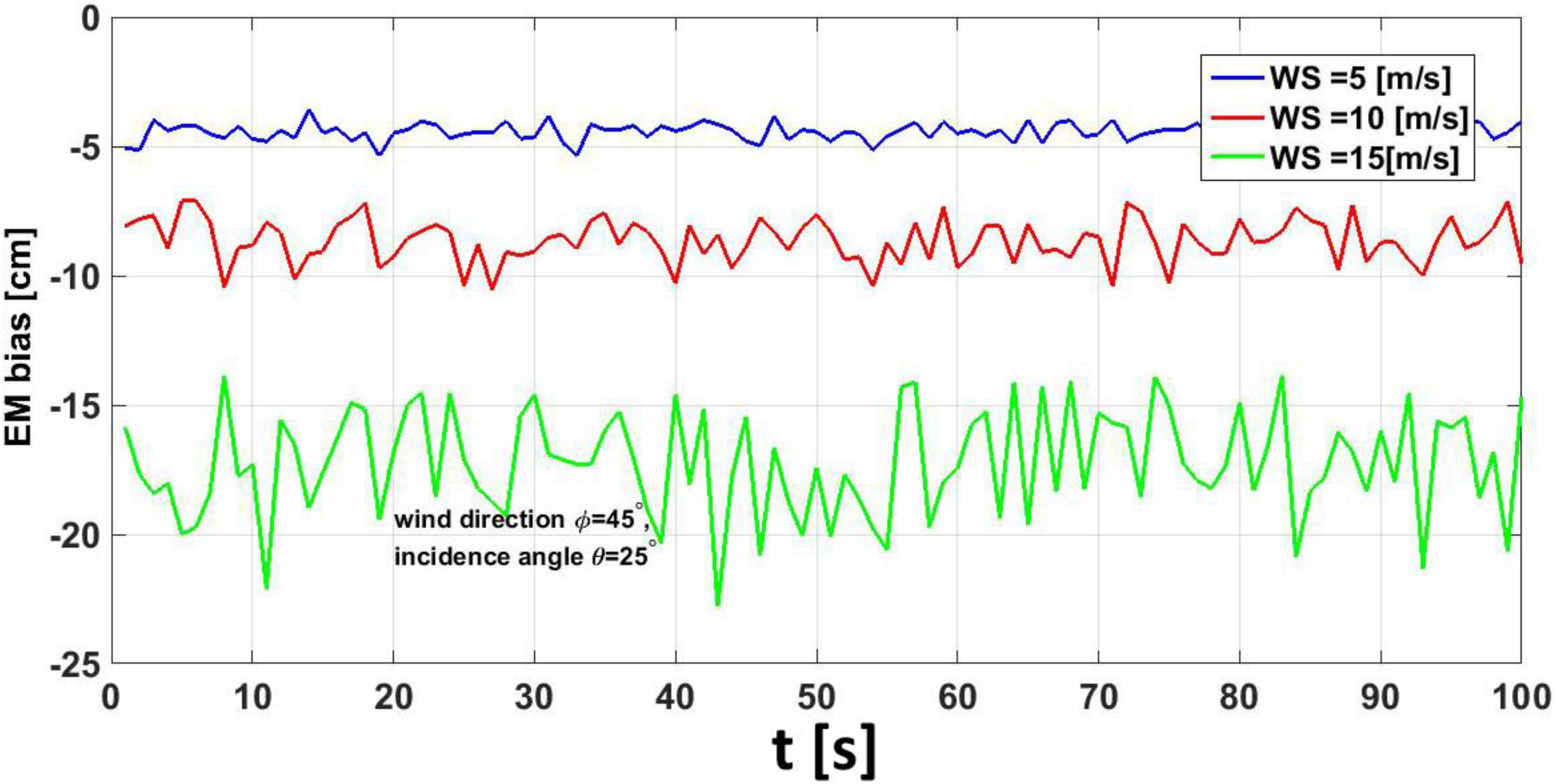
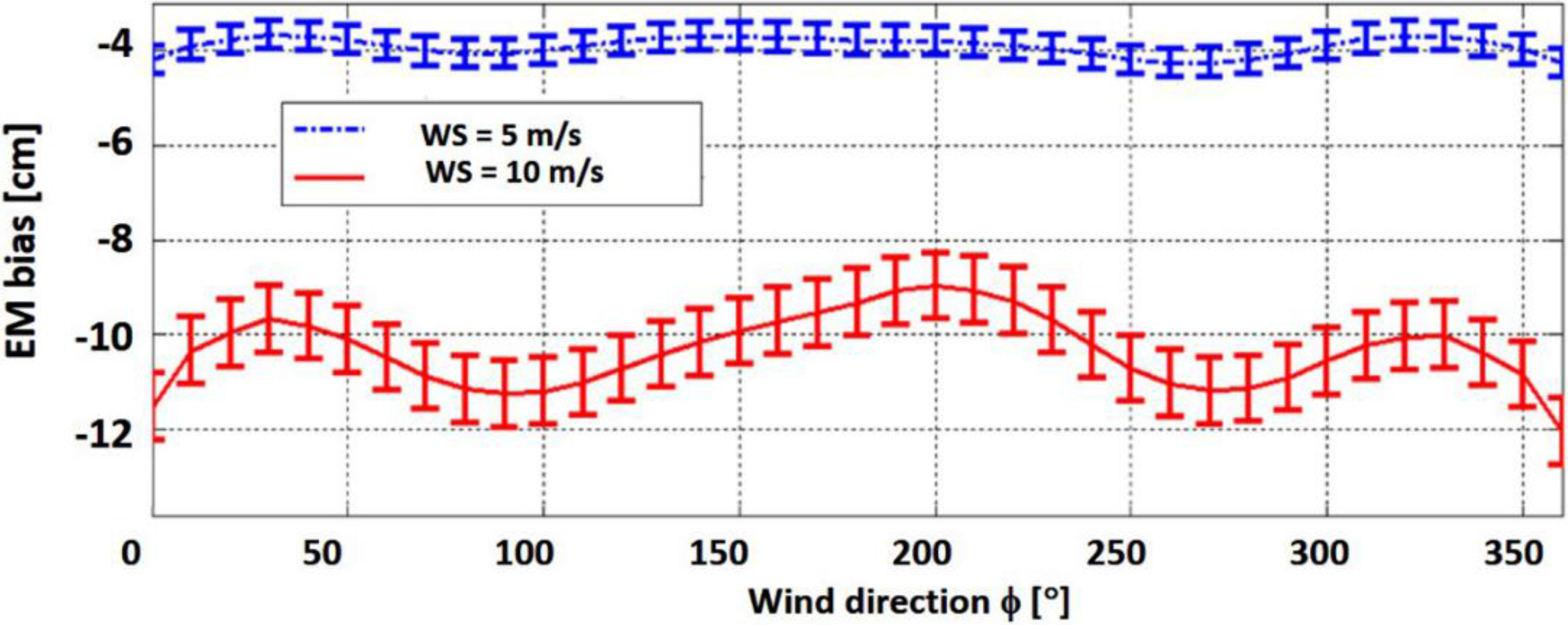
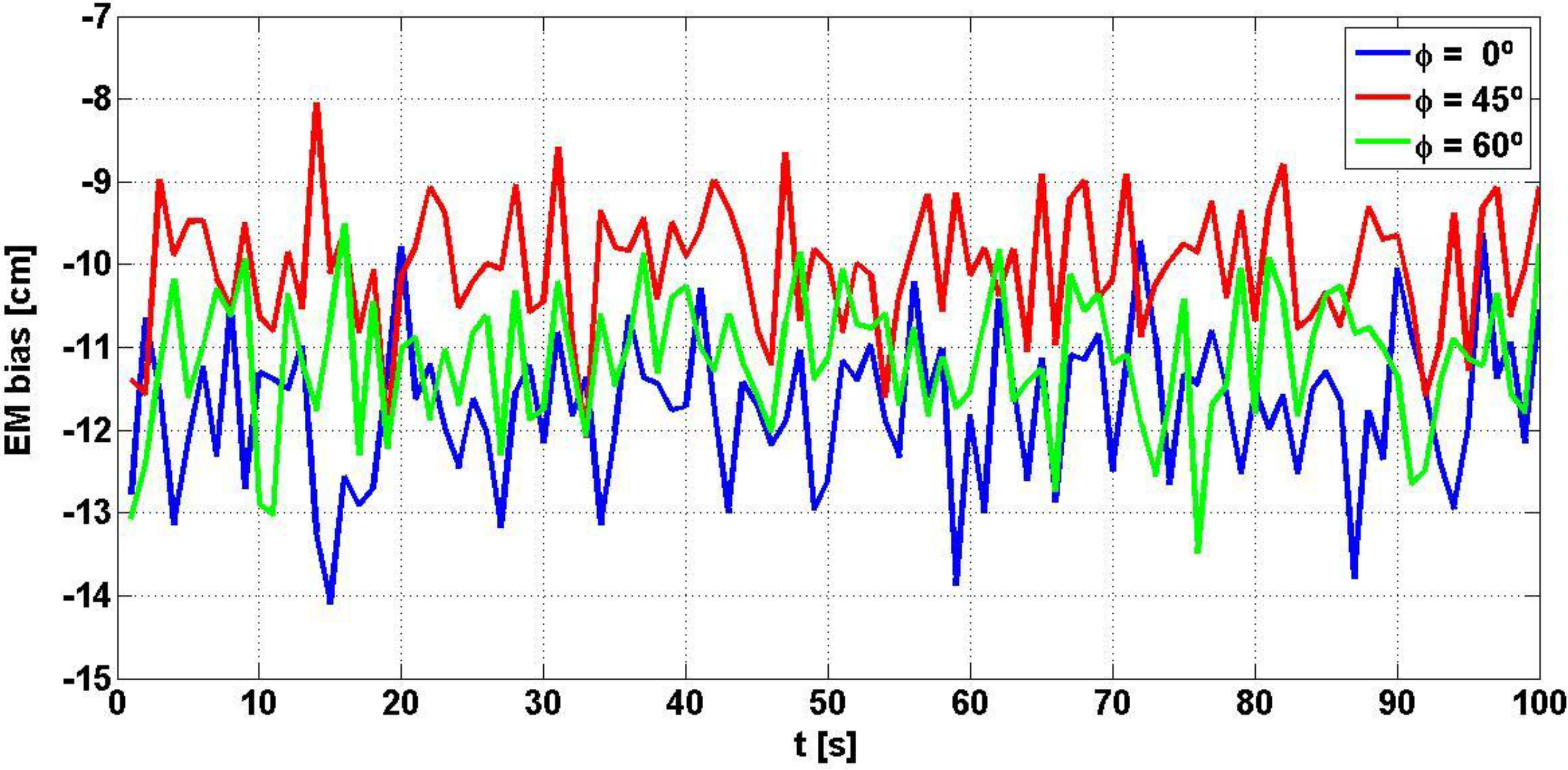
3.1. Computing Time-Domain EM Bias under Specific Incidence and Azimuth Angles


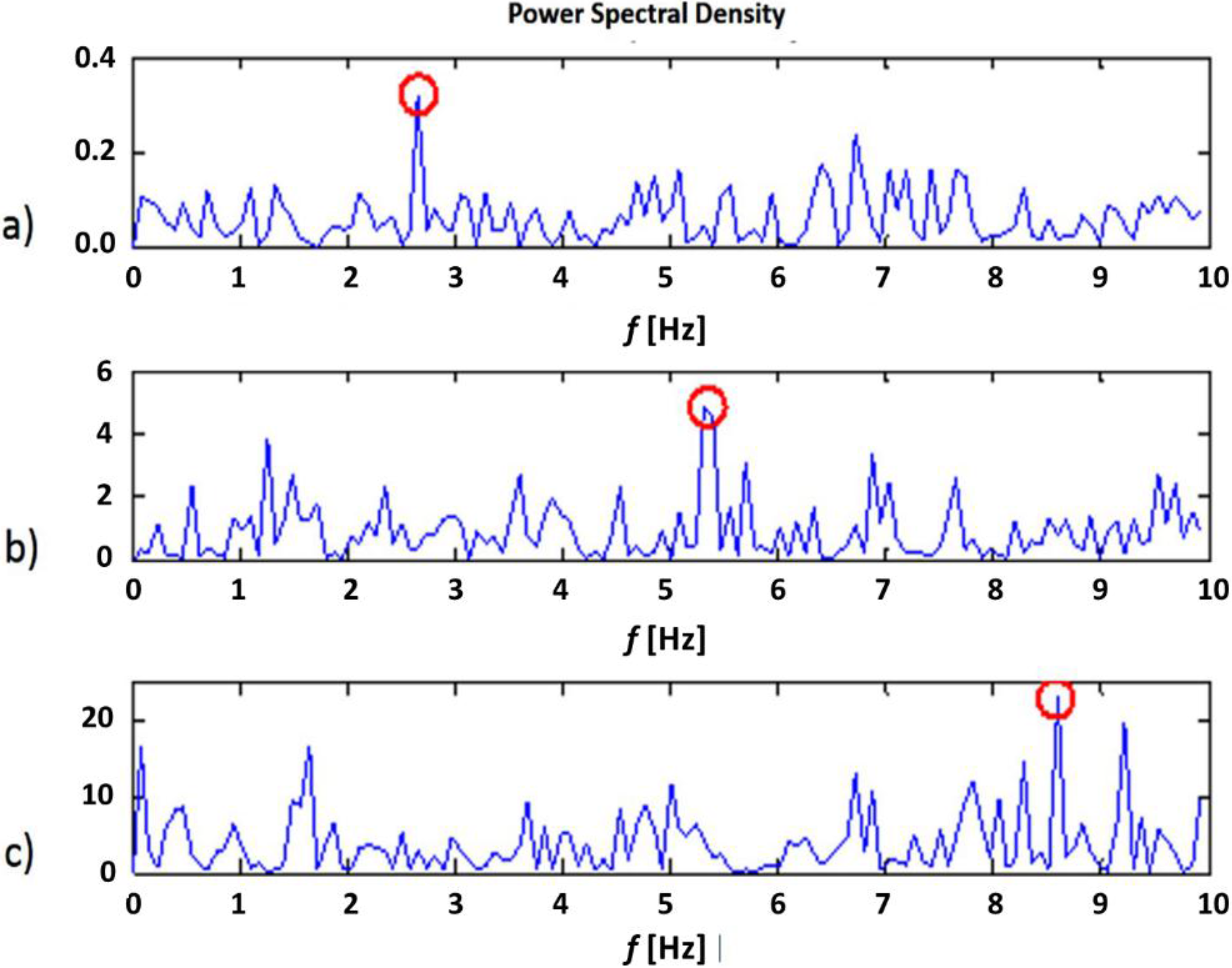
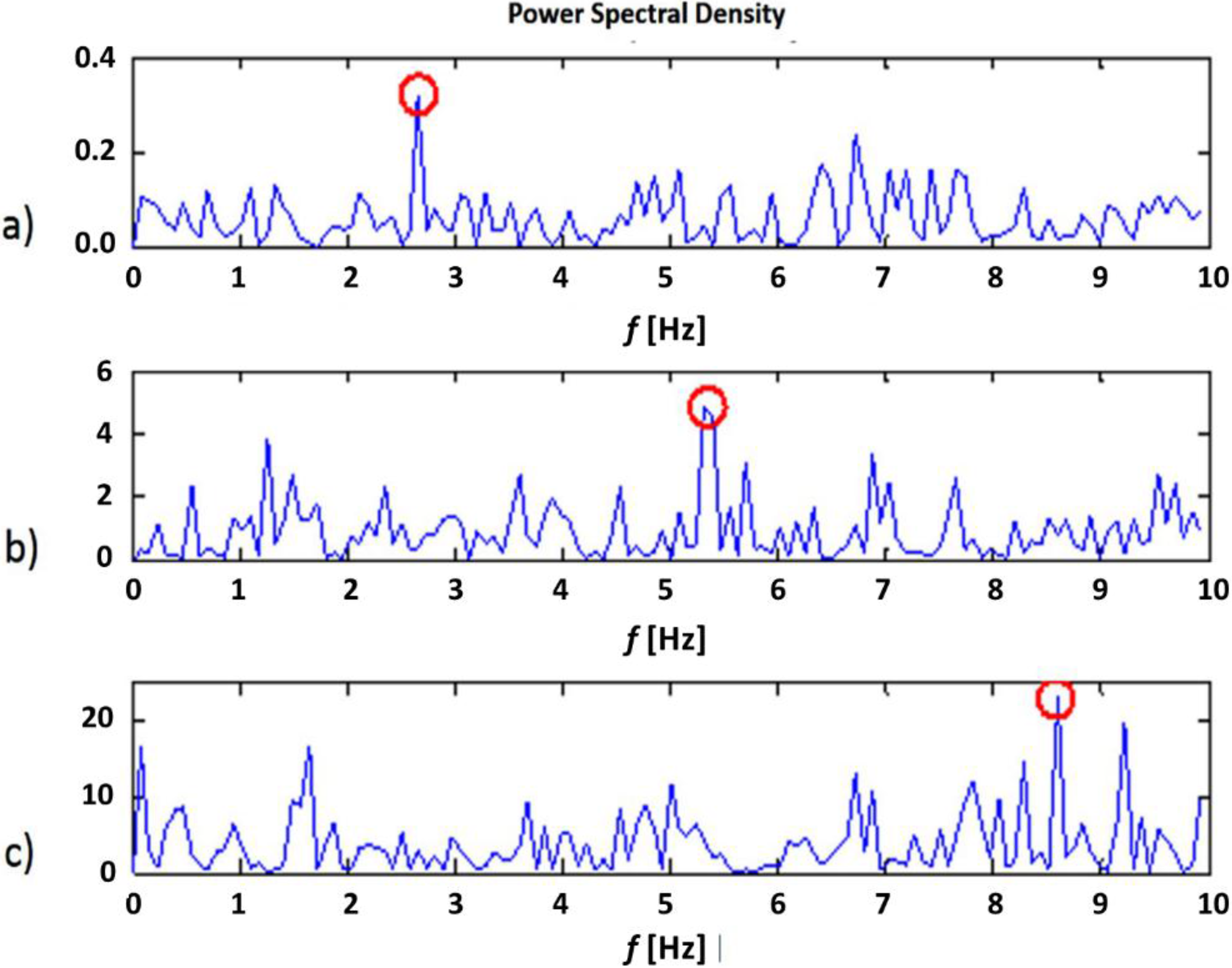
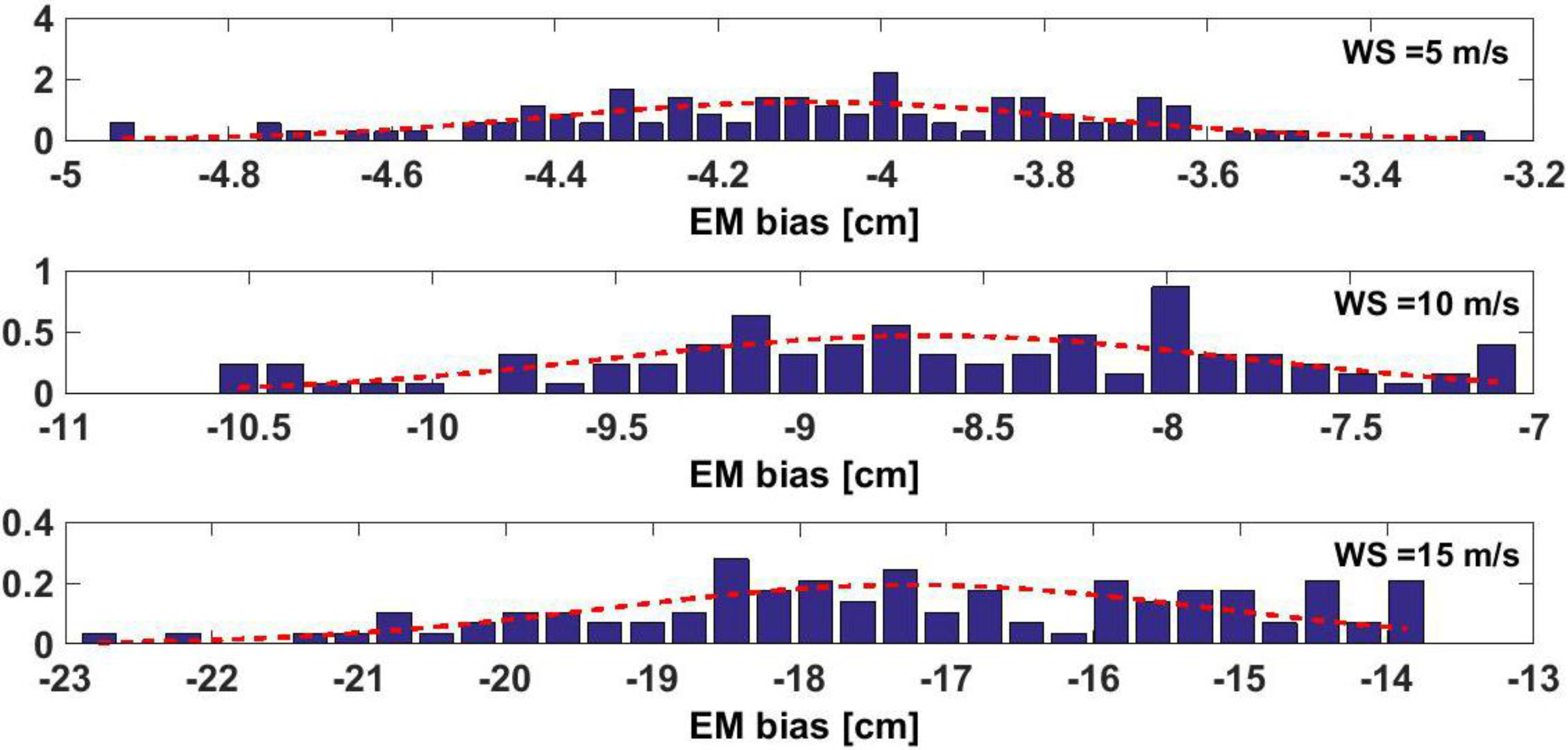
3.2. Non-Linearity Behavior of the Time-Domain EM Bias Descriptors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| U\10\ (m/s) | (cm) | (cm) | (Unitless) | (Unitless) |
|---|---|---|---|---|
| 5 | −3.89 | 0.281 | −0.451 | 5.31 |
| 10 | −8.37 | 0.921 | −0.490 | 5.01 |
| 15 | −13.35 | 1.61 | −0.598 | 4.35 |
| U\10\ (m/s) | (cm) | (cm) | (Unitless) | (Unitless) |
|---|---|---|---|---|
| 5 | −3.72 | 0.292 | −0.475 | 5.44 |
| 10 | −9.73 | 0.959 | −0.493 | 5.03 |
| 15 | −17.2 | 2.06 | −0.592 | 4.84 |
| U\10\ (m/s) | (cm) | (cm) | (Unitless) | (Unitless) |
|---|---|---|---|---|
| 5 | −4.96 | 0.176 | −1.041 | 6.95 |
| 10 | −13.8 | 0.691 | −1.351 | 4.59 |
| 15 | −24.1 | 1.28 | −1.516 | 4.42 |
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hall, C.D.; Cordey, R.A. Multistatic scatterometry. In Proceedings of the 1988 IEEE International Geoscience Remote Sensing Symposium, Seattle, WA, USA, 6–10 July 1998; pp. 561–562.
- Martin-Neira, M.A. Passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Radar Altimetry Tutorial. Available online: http://www.altimetry.info/ (accessed on 10 August 2015).
- Ghavidel, A.; Schiavulli, D.; Camps, A. Numerical computation of the electromagnetic bias in GNSS-R altimetry. IEEE T Geosci Remote Sens. 2015. [Google Scholar] [CrossRef]
- Yaplee, B.S.; Shapiro, A.; Hammond, D.L.; Au, B.D.; Uliana, E.A. Nanosecond radar observations of the ocean surface from a stable platform. IEEE T. Geosci. Electron. 1971, 9, 170–174. [Google Scholar] [CrossRef]
- Jackson, F.C. The reflection of impulses from a nonlinear random sea. J. Geophys. Res. Ocean. 1979, 84, 4939–4943. [Google Scholar] [CrossRef]
- Srokosz, M.A. On the joint distribution of surface elevation and slopes for a nonlinear random sea, with an application to radar altimetry. J. Geophys. Res. Ocean. 1986, 91, 995–1006. [Google Scholar] [CrossRef]
- Glazman, R.E.; Fabrikant, A.; Srokosz, M.A. Numerical analysis of the sea state bias for satellite altimetry. J. Geophys. Res. Ocean. 1996, 101, 3789–3799. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Thompson, D.; Vandemark, D.; Chapron, B. Weakly nonlinear theory and sea state bias estimations. J. Geophys. Res. Ocean. 1999, 104, 7641–7647. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Thompson, D.R.; Vandemark, D.; Chapron, B. Higher-order hydrodynamic modulation: theory and applications for ocean waves. Proc. R. Soc. Lond. A 2001, 457, 2585–2608. [Google Scholar] [CrossRef]
- Walsh, E.J.; Jackson, F.C.; Hines, D.E.; Piazza, C.; Hevizi, L.G.; Mclaughlin, D.J.; Mcintosh, R.E.; Swift, R.N.; Scott, J.F.; Yungel, J.K.; et al. Frequency dependence of electromagnetic bias in radar altimeter sea surface range measurements. J. Geophys. Res. Ocean. 1991, 96, 20571–20583. [Google Scholar] [CrossRef]
- Hevizi, L.G.; Walsh, E.J.; McIntosh, R.E.; Vandemark, D.; Hines, D.E.; Swift, R.N.; Scott, J.F. Electromagnetic bias in sea surface range measurements at frequencies of the TOPEX/POSEIDON satellite. IEEE T. Geosci. Remote Sens. 1993, 31, 376–388. [Google Scholar] [CrossRef]
- Millet, F.W.; Warnick, K.F.; Arnold, D.V. Electromagnetic bias at off-nadir incidence angles. J. Geophys. Res. Ocean. 2005, 110, 1–13. [Google Scholar] [CrossRef]
- Millet, F.W.; Warnick, K.F.; Nagel, J.R.; Arnold, D.V. Physical optics-based electromagnetic bias theory with surface height-slope cross-correlation and hydrodynamic modulation. IEEE T. Geosci. Remote Sens. 2006, 44, 1470–1483. [Google Scholar] [CrossRef]
- Ghavidel, A.; Schiavulli, D.; Camps, A. A numerical simulator to evaluate the electromagnetic bias in GNSS-R altimetry. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2014, Quebec, QC, Canada, 13–18 July 2014; pp. 4066–4069.
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. Ocean. 1997, 102, 15781–15796. [Google Scholar] [CrossRef]
- Tatarskii, V.I.; Tatarskii, V.V. Statistical non-Gaussian model of sea surface with anisotropic spectrum for wave scattering theory. Part II. Prog. Electromagn. Res. 1999, 22, 259–291. [Google Scholar] [CrossRef]
- Klein, L.A.; Swift, C.T. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Antennas Propag. 1977, 25, 104–111. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Thompson, D.R.; Chapron, B.; Vandemark, D. Improved electromagnetic bias theory. J. Geophys. Res. Ocean. 2000, 105, 1299–1310. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Gommenginger, C.; Bisceglie, M.D.; Galdi, C.; Srokosz, M.A. Simulation of L-band bistatic returns from the ocean surface: A facet approach with application to ocean GNSS reflectometry. IEEE T. Geosci. Remote Sens. 2012, 50, 960–971. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE T. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. From theory to applications. In Microwave Remote Sensing: Active and Passive; Artech House: Norwood, MA, USA, 1986; Volume 3, p. 1120. [Google Scholar]
- Brown, S. Measures of Shape: Skewness and Kurtosis. Available online: http://brownmath.com/stat/shape.htm (accessed on 3 July 2015).
- Valencia, E.; Camps, A.; Marchan-Hernandez, J.F.; Park, H.; Bosch-Lluis, X.; Rodriguez-Alvarez, N.; Ramos-Perez, I. Ocean surface’s scattering coefficient retrieval by Delay-Doppler Map inversion. IEEE Geosci. Remote Sens. Lett. 2011, 8, 750–754. [Google Scholar] [CrossRef]
- Di Martino, G.; Iodice, A.; Riccio, D.; Ruello, G. A physical approach for SAR speckle simulation: First results. Eur. J. Remote Sens. 2013, 46, 823–836. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Valencia i Domenech, E.; Pascual, D.; Martin, F.; Rius, A.; Ribo, S.; Benito, J.; Andres-Beivide, A.; Saameno, P.; et al. Optimization and performance analysis of interferometric GNSS-R altimeters: Application to the PARIS IoD mission. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2014, 7, 1436–1451. [Google Scholar] [CrossRef]
- Mapping Sea Surface from the Space Station. http://www.esa.int/Our_Activities/Observing_the_Earth/Mapping_sea_surface_from_the_Space_Station (accessed on 3 July 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghavidel, A.; Camps, A. Time-domain Statistics of the Electromagnetic Bias in GNSS-Reflectometry. Remote Sens. 2015, 7, 11151-11162. https://doi.org/10.3390/rs70911151
Ghavidel A, Camps A. Time-domain Statistics of the Electromagnetic Bias in GNSS-Reflectometry. Remote Sensing. 2015; 7(9):11151-11162. https://doi.org/10.3390/rs70911151
Chicago/Turabian StyleGhavidel, Ali, and Adriano Camps. 2015. "Time-domain Statistics of the Electromagnetic Bias in GNSS-Reflectometry" Remote Sensing 7, no. 9: 11151-11162. https://doi.org/10.3390/rs70911151