- Article

P3CL: Pseudo-Label Confidence-Calibrated Curriculum Learning for Weakly Supervised Urban Airborne Laser Scanning Point Cloud Classification
- Ziwei Luo,
- Tao Zeng and
- Yongyang Xu
- + 4 authors
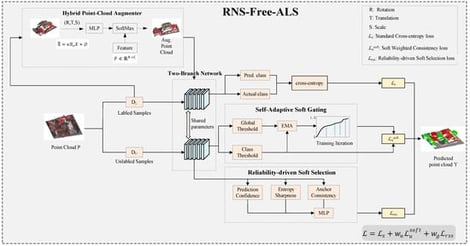
Urban airborne laser scanning (ALS) point clouds cover extensive geographical areas, rendering dense point-level annotation economically prohibitive and limiting the feasibility of fully supervised learning. In weakly supervised settings for urban ALS data, the natural long-tailed class distribution—where ground and building points dominate and smaller objects are rare—combined with the use of fixed pseudo-label thresholds under sparse annotations exacerbates confirmation bias and increases prediction uncertainty. This ultimately restricts the effective utilization of unlabeled data during training. To overcome these challenges, we propose a pseudo-label confidence-calibrated curriculum learning framework designed for weakly supervised ALS point cloud classification. The framework introduces a confidence-aware self-adaptive soft gating (CSS) mechanism that dynamically adjusts category-specific thresholds online using exponential moving average statistics and scene-aware normalization, eliminating the need for manual scheduling while improving pseudo-label quality. In addition, a reliability-driven soft selection (RSS) constraint is incorporated, in which each point is assigned a comprehensive reliability score that integrates prediction confidence, entropy clarity, and cross-augmentation consistency, enabling adaptive soft weighting to replace hard pseudo-label selection and achieve more balanced sample utilization. These components are further integrated into a unified pseudo-label confidence-calibrated curriculum learning framework (P3CL) that progressively shifts the model’s focus from high-certainty samples to more ambiguous ones, effectively mitigating confirmation bias. Extensive experiments on three public ALS benchmarks demonstrate that the proposed method consistently outperforms existing weakly supervised approaches and achieves competitive performance compared with several fully supervised models.
9 February 2026