
ECHO: Energy-Efficient Computation Harnessing Online Arithmetic—An MSDF-Based Accelerator for DNN Inference



Abstract
1. Introduction
2. Related Works
3. Materials and Methods
3.1. Online Arithmetic
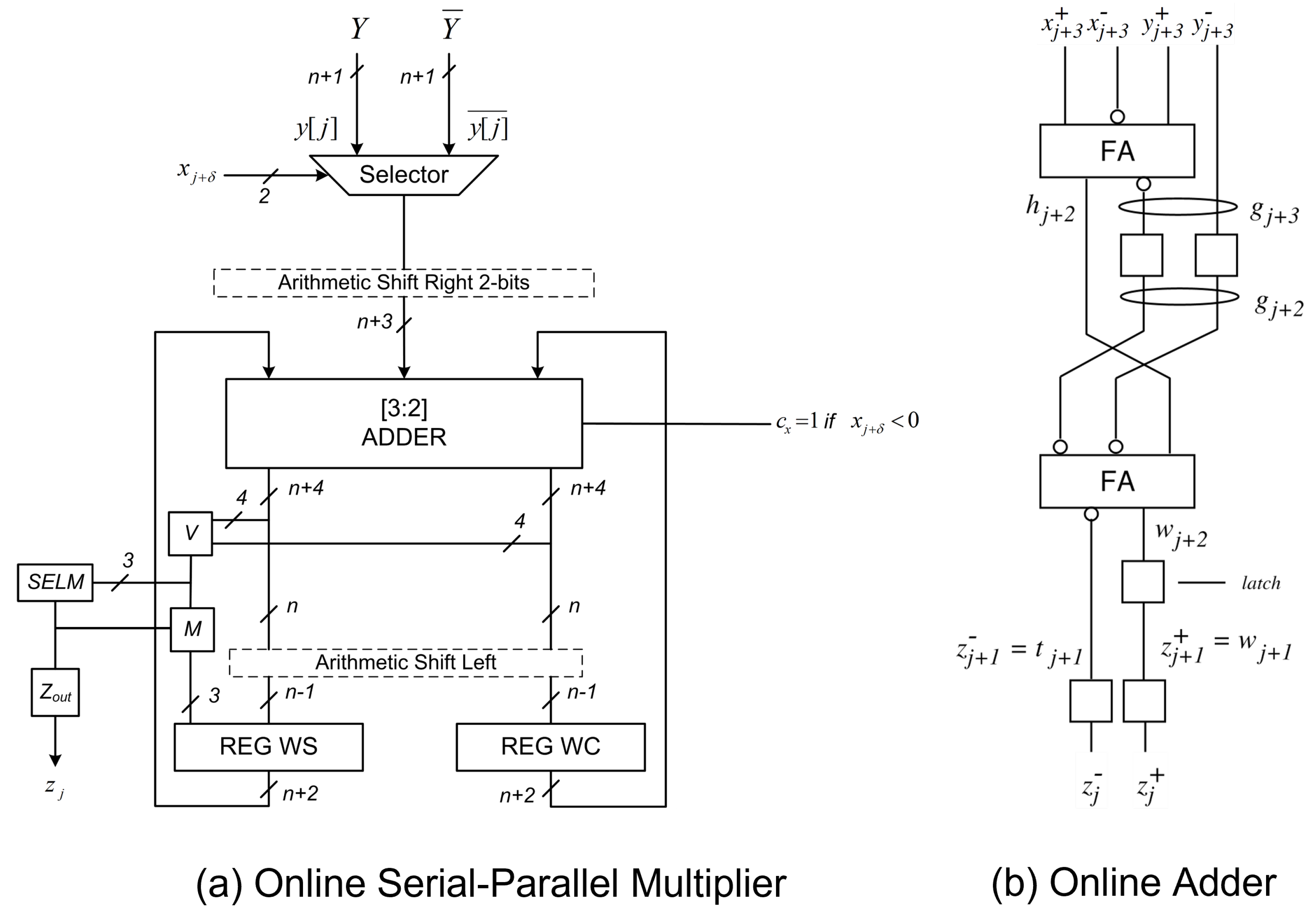
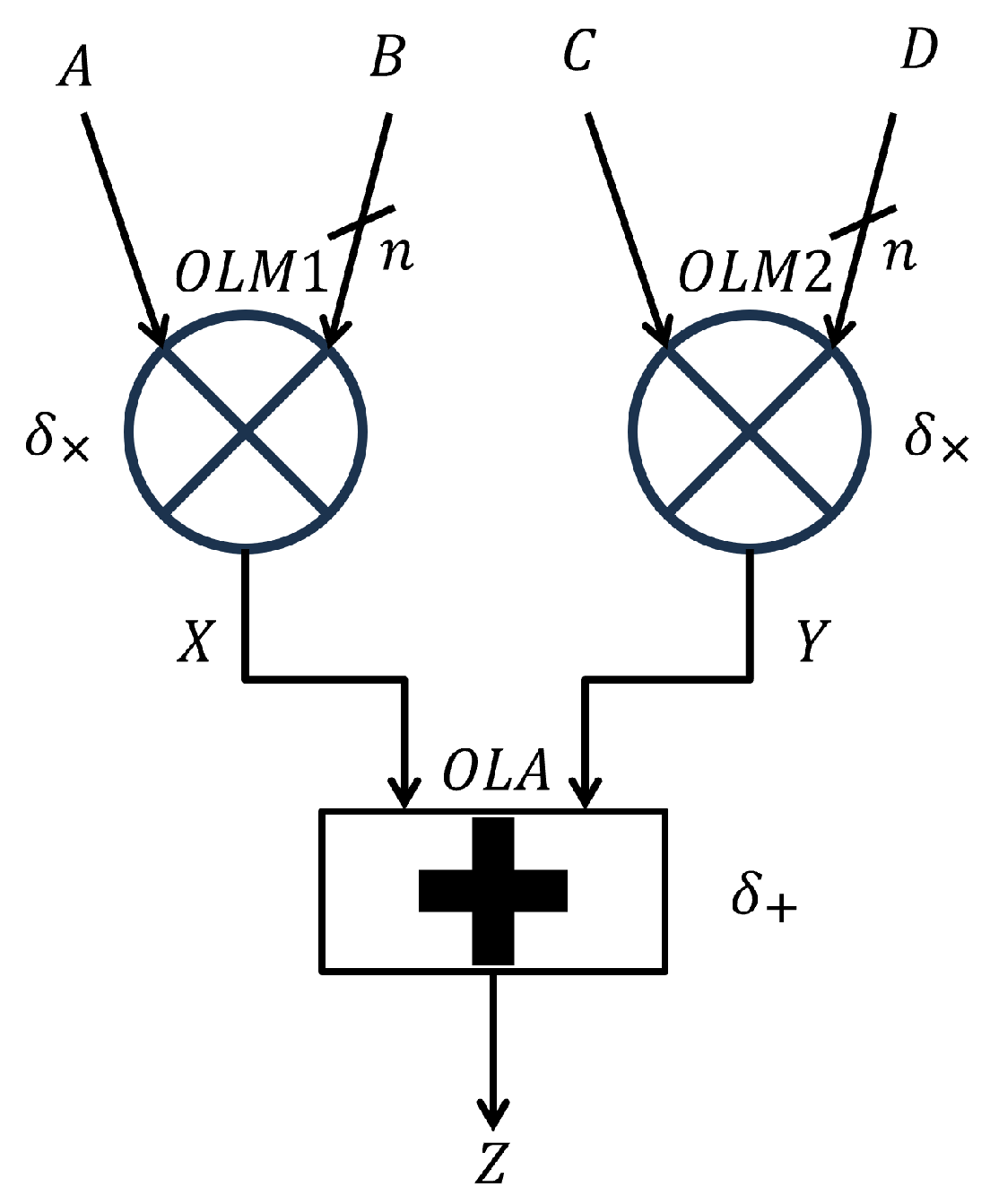
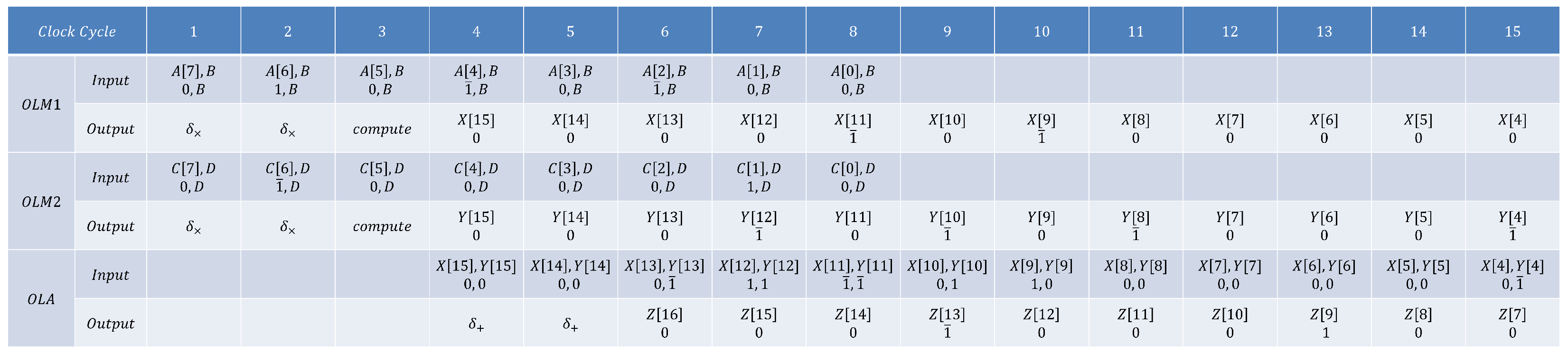
3.1.1. Online Multiplier (OLM)
| Algorithm 1 Serial–parallel online multiplication |
|
3.1.2. Online Adder (OLA)
3.2. Proposed Design
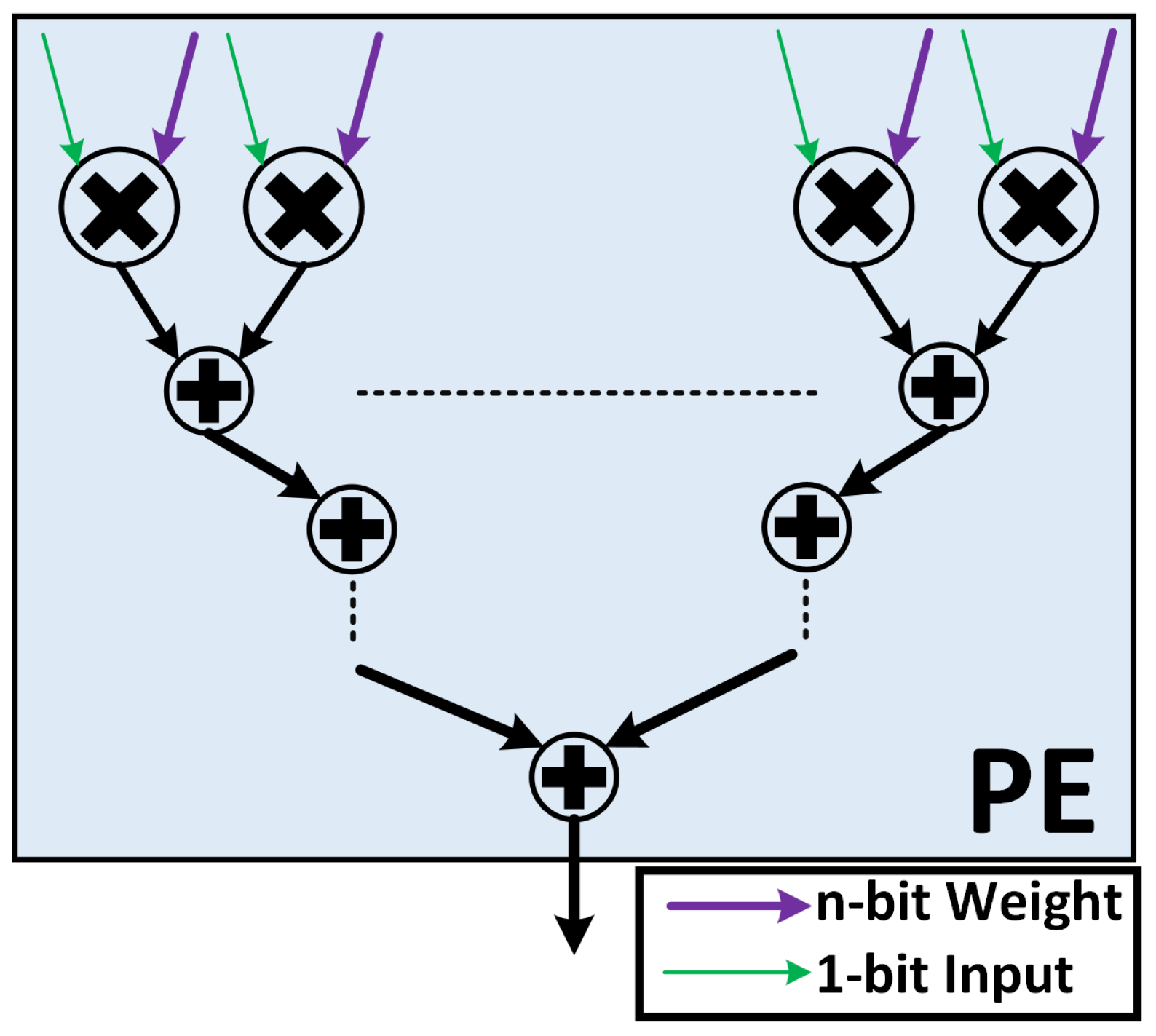
3.2.1. Processing Engine Architecture
3.2.2. Early Detection and Termination of Negative Computations
| Algorithm 2 Early detection and termination of negative activations in ECHO |
|
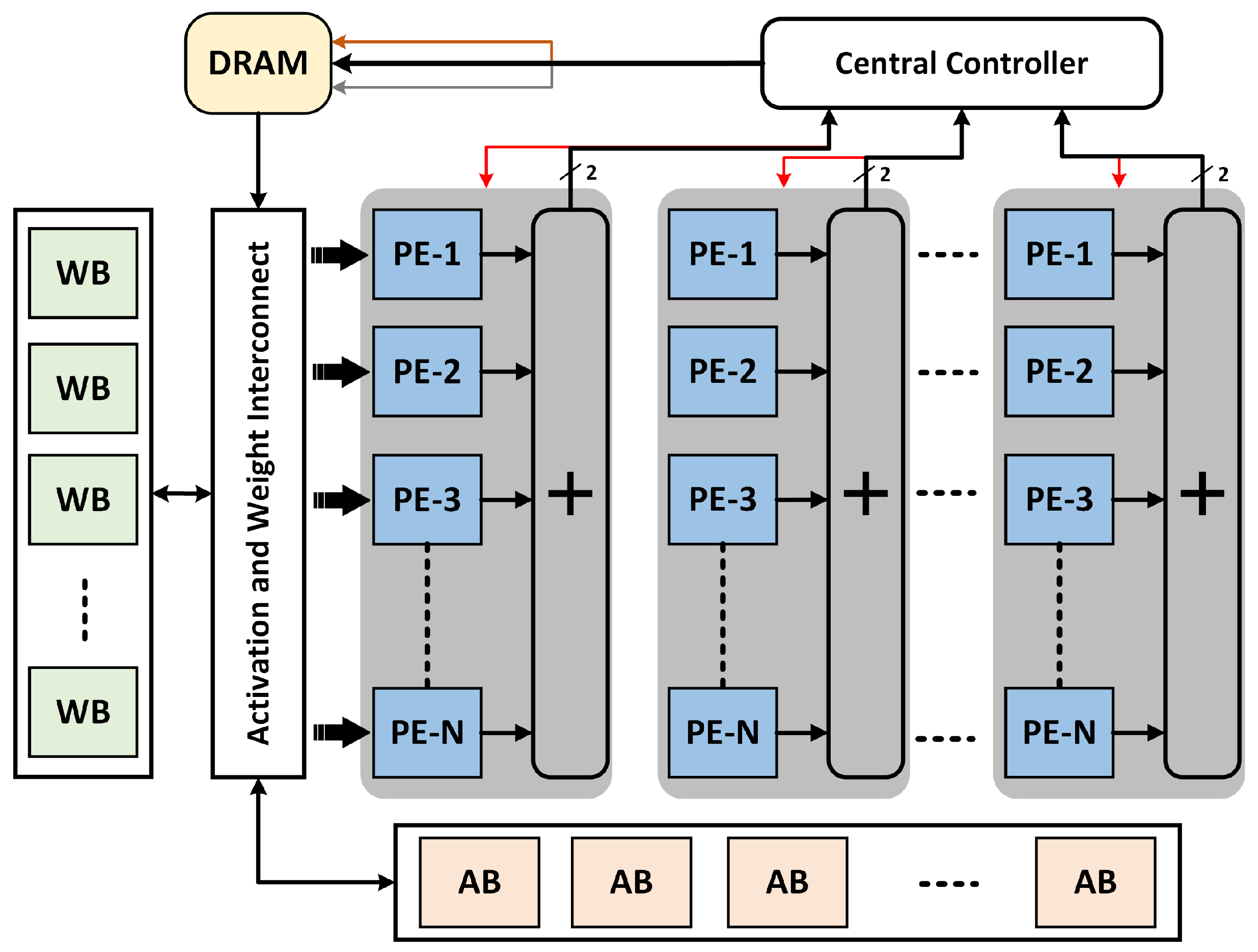
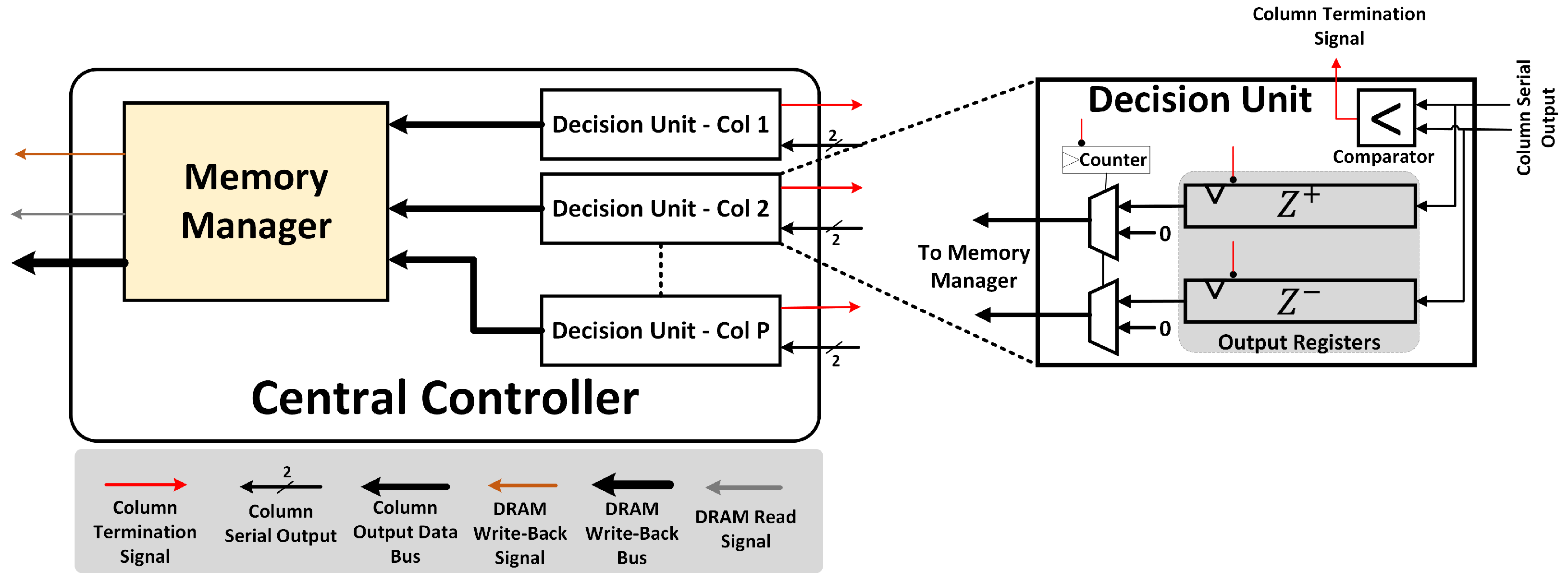
3.2.3. Accelerator Design
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, G.; Xu, Z.; Li, J.; Yang, J.; Zeng, T.; Qi, G.J. CTCNet: A CNN-transformer cooperation network for face image super-resolution. IEEE Trans. Image Process. 2023, 32, 1978–1991. [Google Scholar] [CrossRef] [PubMed]
- Usman, M.; Khan, S.; Park, S.; Lee, J.A. AoP-LSE: Antioxidant Proteins Classification Using Deep Latent Space Encoding of Sequence Features. Curr. Issues Mol. Biol. 2021, 43, 1489–1501. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Wang, Z.; Liu, X.; Zeng, N.; Liu, Y.; Alsaadi, F.E. A survey of deep neural network architectures and their applications. Neurocomputing 2017, 234, 11–26. [Google Scholar] [CrossRef]
- Kwon, H.; Chatarasi, P.; Pellauer, M.; Parashar, A.; Sarkar, V.; Krishna, T. Understanding reuse, performance, and hardware cost of dnn dataflow: A data-centric approach. In Proceedings of the 52nd Annual IEEE/ACM International Symposium on Microarchitecture, Columbus, OH, USA, 12–16 October 2019; pp. 754–768. [Google Scholar]
- Gupta, U.; Jiang, D.; Balandat, M.; Wu, C.J. Towards green, accurate, and efficient ai models through multi-objective optimization. In Workshop Paper at Tackling Climate Change with Machine Learning; ICLR: Vienna, Austria, 2023. [Google Scholar]
- Narayanan, D.; Harlap, A.; Phanishayee, A.; Seshadri, V.; Devanur, N.R.; Ganger, G.R.; Gibbons, P.B.; Zaharia, M. PipeDream: Generalized pipeline parallelism for DNN training. In Proceedings of the 27th ACM Symposium on Operating Systems Principles, Huntsville, ON, Canada, 27–30 October 2019; pp. 1–15. [Google Scholar]
- Deng, C.; Liao, S.; Xie, Y.; Parhi, K.K.; Qian, X.; Yuan, B. PermDNN: Efficient compressed DNN architecture with permuted diagonal matrices. In Proceedings of the 2018 51st Annual IEEE/ACM international symposium on microarchitecture (MICRO), Fukuoka, Japan, 20–24 October 2018; pp. 189–202. [Google Scholar]
- Jain, S.; Venkataramani, S.; Srinivasan, V.; Choi, J.; Chuang, P.; Chang, L. Compensated-DNN: Energy efficient low-precision deep neural networks by compensating quantization errors. In Proceedings of the 55th Annual Design Automation Conference, San Francisco, CA, USA, 24–29 June 2018; pp. 1–6. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, US, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Hanif, M.A.; Javed, M.U.; Hafiz, R.; Rehman, S.; Shafique, M. Hardware–Software Approximations for Deep Neural Networks. Approx. Circuits Methodol. CAD 2019, 269–288. [Google Scholar]
- Zhang, S.; Mao, W.; Wang, Z. An efficient accelerator based on lightweight deformable 3D-CNN for video super-resolution. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 70, 2384–2397. [Google Scholar] [CrossRef]
- Lo, C.Y.; Sham, C.W. Energy efficient fixed-point inference system of convolutional neural network. In Proceedings of the 2020 IEEE 63rd International Midwest Symposium on Circuits and Systems (MWSCAS), Springfield, MA, USA, 9–12 August 2020; pp. 403–406. [Google Scholar]
- Rastegari, M.; Ordonez, V.; Redmon, J.; Farhadi, A. Xnor-net: Imagenet classification using binary convolutional neural networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 525–542. [Google Scholar]
- Agrawal, A.; Choi, J.; Gopalakrishnan, K.; Gupta, S.; Nair, R.; Oh, J.; Prener, D.A.; Shukla, S.; Srinivasan, V.; Sura, Z. Approximate computing: Challenges and opportunities. In Proceedings of the 2016 IEEE International Conference on Rebooting Computing (ICRC), San Diego, CA, USA, 17–19 October 2016; pp. 1–8. [Google Scholar]
- Liu, B.; Wang, Z.; Guo, S.; Yu, H.; Gong, Y.; Yang, J.; Shi, L. An energy-efficient voice activity detector using deep neural networks and approximate computing. Microelectron. J. 2019, 87, 12–21. [Google Scholar] [CrossRef]
- Szandała, T. Review and comparison of commonly used activation functions for deep neural networks. Bio-Inspired Neurocomput. 2021, 203–224. [Google Scholar]
- Dubey, S.R.; Singh, S.K.; Chaudhuri, B.B. Activation functions in deep learning: A comprehensive survey and benchmark. Neurocomputing 2022, 503, 92–108. [Google Scholar] [CrossRef]
- Cao, J.; Pang, Y.; Li, X.; Liang, J. Randomly translational activation inspired by the input distributions of ReLU. Neurocomputing 2018, 275, 859–868. [Google Scholar] [CrossRef]
- Shi, S.; Chu, X. Speeding up convolutional neural networks by exploiting the sparsity of rectifier units. arXiv 2017, arXiv:1704.07724. [Google Scholar]
- Akhlaghi, V.; Yazdanbakhsh, A.; Samadi, K.; Gupta, R.K.; Esmaeilzadeh, H. Snapea: Predictive early activation for reducing computation in deep convolutional neural networks. In Proceedings of the 2018 ACM/IEEE 45th Annual International Symposium on Computer Architecture (ISCA), Los Angeles, CA, USA, 1–6 June 2018; pp. 662–673. [Google Scholar]
- Lee, D.; Kang, S.; Choi, K. ComPEND: Computation Pruning through Early Negative Detection for ReLU in a deep neural network accelerator. In Proceedings of the 2018 International Conference on Supercomputing, Beijing, China, 12–15 June 2018; pp. 139–148. [Google Scholar]
- Kim, N.; Park, H.; Lee, D.; Kang, S.; Lee, J.; Choi, K. ComPreEND: Computation Pruning through Predictive Early Negative Detection for ReLU in a Deep Neural Network Accelerator. IEEE Trans. Comput. 2021, 71, 1537–1550. [Google Scholar] [CrossRef]
- Luo, T.; Liu, S.; Li, L.; Wang, Y.; Zhang, S.; Chen, T.; Xu, Z.; Temam, O.; Chen, Y. DaDianNao: A neural network supercomputer. IEEE Trans. Comput. 2016, 66, 73–88. [Google Scholar] [CrossRef]
- Judd, P.; Albericio, J.; Hetherington, T.; Aamodt, T.M.; Moshovos, A. Stripes: Bit-serial deep neural network computing. In Proceedings of the 2016 49th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Taipei, Taiwan, 15–19 October 2016; pp. 1–12. [Google Scholar]
- Albericio, J.; Delmás, A.; Judd, P.; Sharify, S.; O’Leary, G.; Genov, R.; Moshovos, A. Bit-Pragmatic Deep Neural Network Computing. In Proceedings of the 2017 50th Annual IEEE/ACM International Symposium on Microarchitecture (MICRO), Boston, MA, USA, 14–17 October 2017; pp. 382–394. [Google Scholar]
- Albericio, J.; Judd, P.; Hetherington, T.; Aamodt, T.; Jerger, N.E.; Moshovos, A. Cnvlutin: Ineffectual-neuron-free deep neural network computing. ACM SIGARCH Comput. Archit. News 2016, 44, 1–13. [Google Scholar] [CrossRef]
- Gao, M.; Pu, J.; Yang, X.; Horowitz, M.; Kozyrakis, C. Tetris: Scalable and efficient neural network acceleration with 3d memory. In Proceedings of the Twenty-Second International Conference on Architectural Support for Programming Languages and Operating Systems, Xi’an, China, 8–12 April 2017; pp. 751–764. [Google Scholar]
- Judd, P.; Albericio, J.; Hetherington, T.; Aamodt, T.; Jerger, N.E.; Urtasun, R.; Moshovos, A. Proteus: Exploiting precision variability in deep neural networks. Parallel Comput. 2018, 73, 40–51. [Google Scholar] [CrossRef]
- Shin, S.; Boo, Y.; Sung, W. Fixed-point optimization of deep neural networks with adaptive step size retraining. In Proceedings of the 2017 IEEE International conference on acoustics, speech and signal processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 1203–1207. [Google Scholar]
- Jouppi, N.P.; Young, C.; Patil, N.; Patterson, D. A domain-specific architecture for deep neural networks. Commun. ACM 2018, 61, 50–59. [Google Scholar] [CrossRef]
- Juracy, L.R.; Garibotti, R.; Moraes, F.G. From CNN to DNN Hardware Accelerators: A Survey on Design, Exploration, Simulation, and Frameworks. Found. Trends® Electron. Des. Autom. 2023, 13, 270–344. [Google Scholar] [CrossRef]
- Shomron, G.; Weiser, U. Spatial correlation and value prediction in convolutional neural networks. IEEE Comput. Archit. Lett. 2018, 18, 10–13. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, T.; Tian, Y.; Yuan, F.; Xu, Q. ApproxANN: An approximate computing framework for artificial neural network. In Proceedings of the 2015 Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 9–13 March 2015; pp. 701–706. [Google Scholar]
- Lee, J.; Kim, C.; Kang, S.; Shin, D.; Kim, S.; Yoo, H.J. UNPU: An energy-efficient deep neural network accelerator with fully variable weight bit precision. IEEE J. Solid-State Circuits 2018, 54, 173–185. [Google Scholar] [CrossRef]
- Hsu, L.C.; Chiu, C.T.; Lin, K.T.; Chou, H.H.; Pu, Y.Y. ESSA: An energy-Aware bit-Serial streaming deep convolutional neural network accelerator. J. Syst. Archit. 2020, 111, 101831. [Google Scholar] [CrossRef]
- Isobe, S.; Tomioka, Y. Low-bit Quantized CNN Acceleration based on Bit-serial Dot Product Unit with Zero-bit Skip. In Proceedings of the 2020 Eighth International Symposium on Computing and Networking (CANDAR), Naha, Japan, 24–27 November 2020; pp. 141–145. [Google Scholar]
- Li, A.; Mo, H.; Zhu, W.; Li, Q.; Yin, S.; Wei, S.; Liu, L. BitCluster: Fine-Grained Weight Quantization for Load-Balanced Bit-Serial Neural Network Accelerators. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2022, 41, 4747–4757. [Google Scholar] [CrossRef]
- Shuvo, M.K.; Thompson, D.E.; Wang, H. MSB-First Distributed Arithmetic Circuit for Convolution Neural Network Computation. In Proceedings of the 2020 IEEE 63rd International Midwest Symposium on Circuits and Systems (MWSCAS), Springfield, MA, USA, 9–12 August 2020; pp. 399–402. [Google Scholar]
- Karadeniz, M.B.; Altun, M. TALIPOT: Energy-Efficient DNN Booster Employing Hybrid Bit Parallel-Serial Processing in MSB-First Fashion. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2021, 41, 2714–2727. [Google Scholar] [CrossRef]
- Song, M.; Zhao, J.; Hu, Y.; Zhang, J.; Li, T. Prediction based execution on deep neural networks. In Proceedings of the 2018 ACM/IEEE 45th Annual International Symposium on Computer Architecture (ISCA), Los Angeles, CA, USA, 1–6 June 2018; pp. 752–763. [Google Scholar]
- Lin, Y.; Sakr, C.; Kim, Y.; Shanbhag, N. PredictiveNet: An energy-efficient convolutional neural network via zero prediction. In Proceedings of the 2017 IEEE international symposium on circuits and systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 1–4. [Google Scholar]
- Asadikouhanjani, M.; Ko, S.B. A novel architecture for early detection of negative output features in deep neural network accelerators. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3332–3336. [Google Scholar] [CrossRef]
- Suresh, B.; Pillai, K.; Kalsi, G.S.; Abuhatzera, A.; Subramoney, S. Early Prediction of DNN Activation Using Hierarchical Computations. Mathematics 2021, 9, 3130. [Google Scholar] [CrossRef]
- Pan, Y.; Yu, J.; Lukefahr, A.; Das, R.; Mahlke, S. BitSET: Bit-Serial Early Termination for Computation Reduction in Convolutional Neural Networks. ACM Trans. Embed. Comput. Syst. 2023, 22, 1–24. [Google Scholar] [CrossRef]
- Ercegovac, M.D. On-Line Arithmetic: An Overview. In Proceedings of the Real-Time Signal Processing VII; Bromley, K., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1984; Volume 0495, pp. 86–93. [Google Scholar]
- Usman, M.; Lee, J.A.; Ercegovac, M.D. Multiplier with reduced activities and minimized interconnect for inner product arrays. In Proceedings of the 2021 55th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 31 October–3 November 2021; pp. 1–5. [Google Scholar]
- Ibrahim, M.S.; Usman, M.; Nisar, M.Z.; Lee, J.A. DSLOT-NN: Digit-Serial Left-to-Right Neural Network Accelerator. In Proceedings of the 2023 26th Euromicro Conference on Digital System Design (DSD), Durres, Albania, 6–8 September 2023; pp. 686–692. [Google Scholar]
- Usman, M.; D. Ercegovac, M.; Lee, J.A. Low-Latency Online Multiplier with Reduced Activities and Minimized Interconnect for Inner Product Arrays. J. Signal Process. Syst. 2023, 95, 777–796. [Google Scholar] [CrossRef]
- Ercegovac, M.D.; Lang, T. Digital Arithmetic; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Xie, X.; Lin, J.; Wang, Z.; Wei, J. An efficient and flexible accelerator design for sparse convolutional neural networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2936–2949. [Google Scholar] [CrossRef]
- Wei, X.; Liang, Y.; Li, X.; Yu, C.H.; Zhang, P.; Cong, J. TGPA: Tile-grained pipeline architecture for low latency CNN inference. In Proceedings of the 2018 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Diego, CA, USA, 5–8 November 2018; pp. 1–8. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Marcel, S.; Rodriguez, Y. Torchvision the machine-vision package of torch. In Proceedings of the 18th ACM International Conference on Multimedia, Firenze, Italy, 29 October 2010; pp. 1485–1488. [Google Scholar]
- Zhang, C.; Li, P.; Sun, G.; Guan, Y.; Xiao, B.; Cong, J. Optimizing FPGA-based accelerator design for deep convolutional neural networks. In Proceedings of the 2015 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays, Monterey, CA, USA, 22–24 February 2015; pp. 161–170. [Google Scholar]
- Meloni, P.; Capotondi, A.; Deriu, G.; Brian, M.; Conti, F.; Rossi, D.; Raffo, L.; Benini, L. NEURAghe: Exploiting CPU-FPGA synergies for efficient and flexible CNN inference acceleration on Zynq SoCs. ACM Trans. Reconfigurable Technol. Syst. (TRETS) 2018, 11, 1–24. [Google Scholar] [CrossRef]
- Li, G.; Liu, Z.; Li, F.; Cheng, J. Block convolution: Toward memory-efficient inference of large-scale CNNs on FPGA. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2021, 41, 1436–1447. [Google Scholar] [CrossRef]
- Yu, Y.; Wu, C.; Zhao, T.; Wang, K.; He, L. OPU: An FPGA-based overlay processor for convolutional neural networks. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2019, 28, 35–47. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, G.; Fang, Z.; Zhou, P.; Pan, P.; Cong, J. Caffeine: Toward Uniformed Representation and Acceleration for Deep Convolutional Neural Networks. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2019, 38, 2072–2085. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | Layer | Kernel Size | M | |
|---|---|---|---|---|
| VGG-16 | C1–C2 | 64 | ||
| C3–C4 | 128 | |||
| C5–C7 | 256 | |||
| C8–C10 | 512 | |||
| C11–C13 | 512 | |||
| ResNet-18 | C1 | 64 | ||
| C2–C5 | 64 | |||
| C6–C9 | 128 | |||
| C10–C13 | 256 | |||
| C14–C17 | 512 | |||
| ResNet-50 | C1 | 64 | ||
| C2-x | 64,256 | |||
| C3-x | 128,512 | |||
| C4-x | 2,561,024 | |||
| C5-x | 5,122,048 |
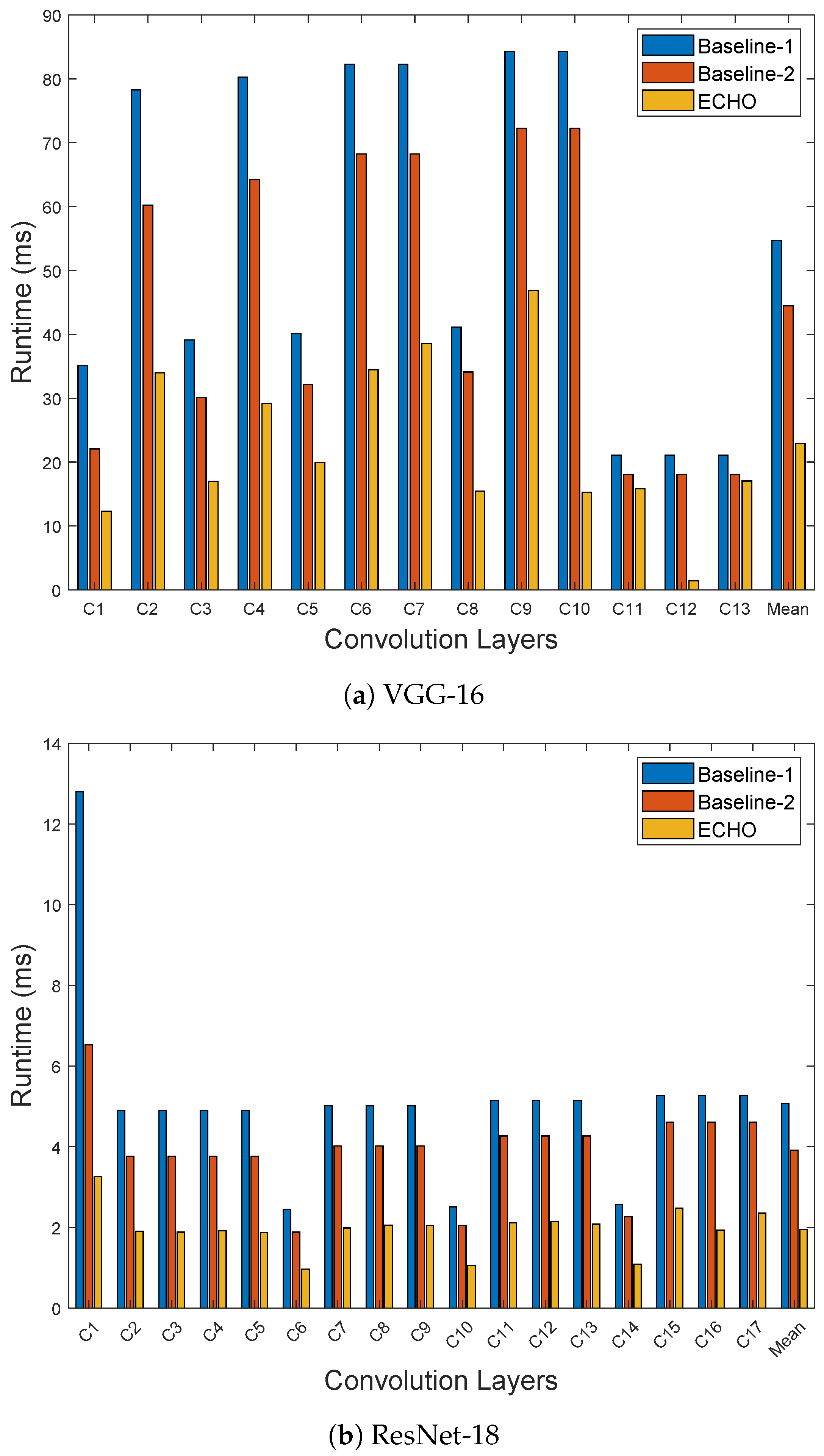
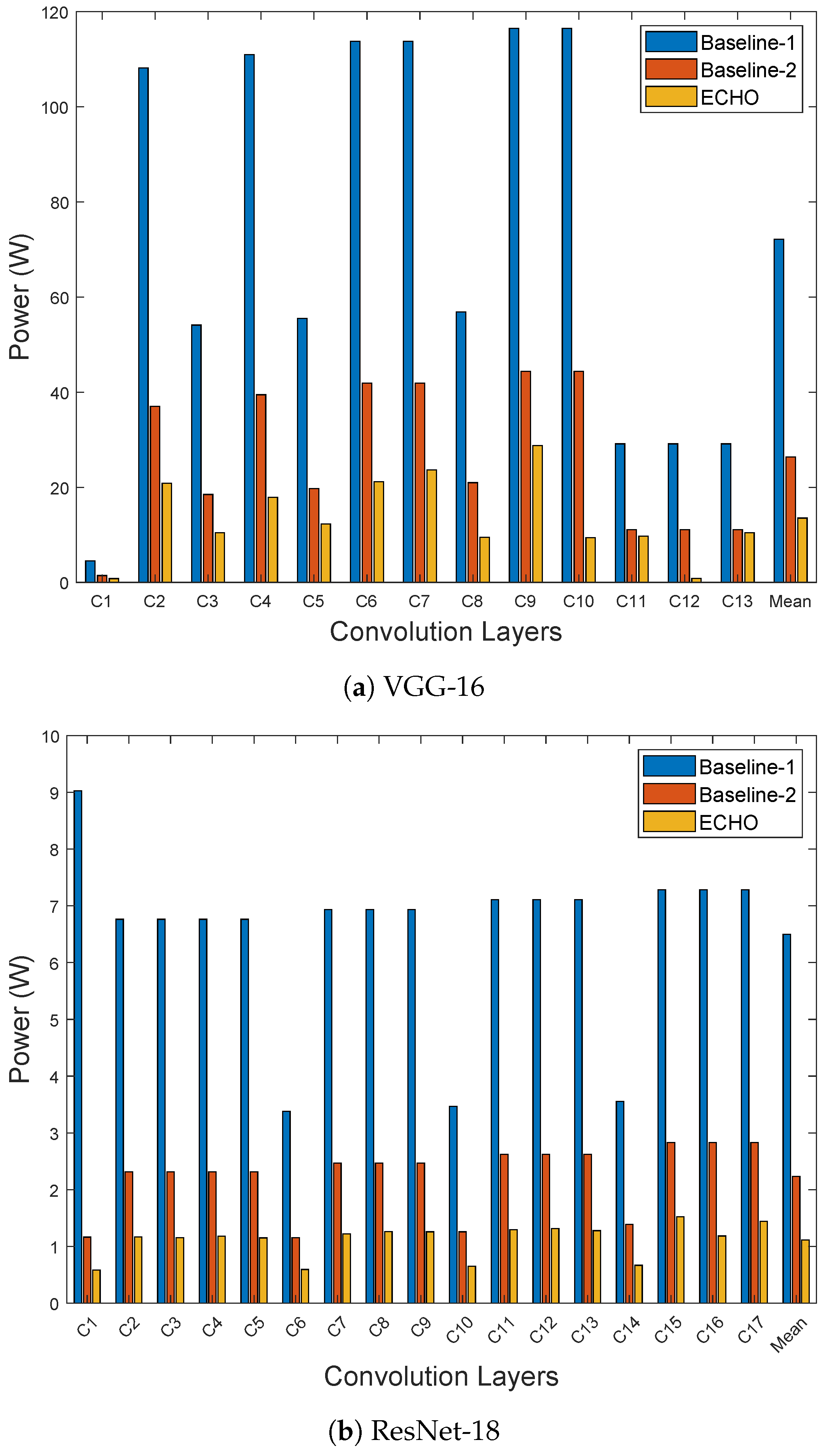
| Layer | Inference Time (ms) | Power (W) | Speedup | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Baseline-1 | Baseline-2 | ECHO | Baseline-1 | Baseline-2 | ECHO | Baseline-1 | Baseline-2 | ECHO | |
| C1 | 35.12 | 22.8 | 12.29 | 4.55 | 1.44 | 0.81 | 1 | 1.54 | 2.86 |
| C2 | 78.27 | 60.21 | 33.95 | 108.2 | 36.99 | 20.86 | 1 | 1.3 | 2.31 |
| C3 | 39.13 | 30.10 | 16.99 | 54.10 | 18.5 | 10.44 | 1 | 1.3 | 2.3 |
| C4 | 80.28 | 64.22 | 29.14 | 110.98 | 39.46 | 17.90 | 1 | 1.25 | 2.75 |
| C5 | 40.14 | 32.11 | 19.98 | 55.49 | 19.73 | 12.27 | 1 | 1.25 | 2.01 |
| C6 | 82.28 | 68.24 | 34.42 | 113.75 | 41.92 | 21.14 | 1 | 1.21 | 2.39 |
| C7 | 82.28 | 68.24 | 38.51 | 113.75 | 41.92 | 23.66 | 1 | 1.21 | 2.14 |
| C8 | 41.14 | 34.12 | 15.49 | 56.87 | 20.96 | 9.51 | 1 | 1.21 | 2.67 |
| C9 | 84.29 | 72.25 | 46.86 | 116.53 | 44.39 | 28.79 | 1 | 1.16 | 1.79 |
| C10 | 84.29 | 72.25 | 15.30 | 116.53 | 44.39 | 9.40 | 1 | 1.16 | 5.51 |
| C11 | 21.07 | 18.06 | 15.86 | 29.13 | 11.09 | 9.74 | 1 | 1.16 | 1.33 |
| C12 | 21.07 | 18.06 | 1.41 | 29.13 | 11.09 | 0.86 | 1 | 1.16 | 14.92 |
| C13 | 21.07 | 18.06 | 17.04 | 29.13 | 11.09 | 10.47 | 1 | 1.16 | 1.24 |
| Mean | 54.65 | 44.46 | 22.87 | 72.16 | 26.38 | 13.53 | 1 | 1.23 | 2.39 |
| Layer | Inference Time (ms) | Power (W) | Speedup (×) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Baseline-1 | Baseline-2 | ECHO | Baseline-1 | Baseline-2 | ECHO | Baseline-1 | Baseline-2 | ECHO | |
| C1 | 12.79 | 6.52 | 3.25 | 9.02 | 1.16 | 0.58 | 1 | 1.96 | 3.93 |
| C2 | 4.89 | 3.76 | 1.9 | 6.76 | 2.31 | 1.16 | 1 | 1.3 | 2.57 |
| C3 | 4.89 | 3.76 | 1.88 | 6.76 | 2.31 | 1.15 | 1 | 1.3 | 2.6 |
| C4 | 4.89 | 3.76 | 1.91 | 6.76 | 2.31 | 1.17 | 1 | 1.3 | 2.56 |
| C5 | 4.89 | 3.76 | 1.87 | 6.76 | 2.31 | 1.15 | 1 | 1.3 | 2.61 |
| C6 | 2.44 | 1.88 | 0.96 | 3.38 | 1.15 | 0.59 | 1 | 1.29 | 2.54 |
| C7 | 5.01 | 4.01 | 1.98 | 6.93 | 2.46 | 1.21 | 1 | 1.24 | 2.53 |
| C8 | 5.01 | 4.01 | 2.05 | 6.93 | 2.46 | 1.26 | 1 | 1.24 | 2.44 |
| C9 | 5.01 | 4.01 | 2.04 | 6.93 | 2.46 | 1.25 | 1 | 1.24 | 2.45 |
| C10 | 2.5 | 2.04 | 1.06 | 3.46 | 1.25 | 0.65 | 1 | 1.22 | 2.35 |
| C11 | 5.14 | 4.26 | 2.1 | 7.1 | 2.62 | 1.29 | 1 | 1.2 | 2.44 |
| C12 | 5.14 | 4.26 | 2.14 | 7.1 | 2.62 | 1.31 | 1 | 1.2 | 2.4 |
| C13 | 5.14 | 4.26 | 2.07 | 7.1 | 2.62 | 1.27 | 1 | 1.2 | 2.48 |
| C14 | 2.57 | 2.26 | 1.08 | 3.55 | 1.39 | 0.66 | 1 | 1.13 | 2.37 |
| C15 | 5.26 | 4.6 | 2.47 | 7.28 | 2.83 | 1.52 | 1 | 1.14 | 2.12 |
| C16 | 5.26 | 4.6 | 1.92 | 7.28 | 2.83 | 1.18 | 1 | 1.14 | 2.73 |
| C17 | 5.26 | 4.6 | 2.35 | 7.28 | 2.83 | 1.44 | 1 | 1.14 | 2.23 |
| Mean | 5.06 | 3.9 | 1.94 | 6.49 | 2.23 | 1.11 | 1 | 1.29 | 2.6 |
| Model | VGG-16 | ResNet-18 | ResNet-50 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Design | Baseline-1 | Baseline-2 | ECHO | Baseline-1 | Baseline-2 | ECHO | Baseline-1 | Baseline-2 | ECHO |
| Frequency (MHz) | 100 | 100 | 100 | ||||||
| Logic Utilization | 238 K (27.6%) | 315 K (36.54%) | 238 K (27.6%) | 315 K (36.54%) | 238 K (27.6%) | 315 K (36.54%) | |||
| BRAM Utilization | 83 (11.4%) | 84 (11.54%) | 83 (11.4%) | 84 (11.54%) | 83 (11.4%) | 84 (11.54%) | |||
| Mean Power (W) | 72.16 | 26.38 | 13.53 | 6.49 | 2.23 | 1.11 | 9.63 | 11.5 | 5.72 |
| Performance (GOPS) | 47.3 | 61.4 | 655 | 47.3 | 61.4 | 123 | 39.01 | 61.4 | 128.7 |
| Latency per Image (ms) | 710.5 | 578.03 | 297.3 | 86.2 | 66.4 | 33.1 | 366.7 | 464.01 | 231.03 |
| Average Speedup (×) | 1 | 1.23 | 2.39 | 1 | 1.29 | 2.6 | 1 | 1.21 | 2.42 |
| Models | VGG-16 | ResNet-18 | ResNet-50 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Designs | NEURAghe [56] | [57] | OPU [58] | Caffeine [59] | ECHO | NEURAghe [56] | [51] | ECHO | [51] | ECHO |
| Device | Zynq Z7045 | Zynq ZC706 | Zynq XC7Z100 | VX690t | VU3P | Zynq Z7045 | Arria10 SX660 | VU3P | Arria10 SX660 | VU3P |
| Frequency (MHz) | 140 | 150 | 200 | 150 | 100 | 140 | 170 | 100 | 170 | 100 |
| Logic Utilization | 100 K | - | - | - | 315 K | 100 K | 102.6 K | 315 K | 102.6 K | 315 K |
| BRAM Utilization | 320 | 1090 | 1510 | 2940 | 84 | 320 | 465 | 84 | 465 | 84 |
| Performance (GOPS) | 169 | 374.98 | 397 | 636 | 655 | 58 | 89.29 | 123 | 90.19 | 128.7 |
| Energy Efficiency (GOPS/W) | 16.9 | - | 24.06 | - | 48.41 | 5.8 | 19.41 | 21.58 | 19.61 | 22.51 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ibrahim, M.S.; Usman, M.; Lee, J.-A. ECHO: Energy-Efficient Computation Harnessing Online Arithmetic—An MSDF-Based Accelerator for DNN Inference. Electronics 2024, 13, 1893. https://doi.org/10.3390/electronics13101893
Ibrahim MS, Usman M, Lee J-A. ECHO: Energy-Efficient Computation Harnessing Online Arithmetic—An MSDF-Based Accelerator for DNN Inference. Electronics. 2024; 13(10):1893. https://doi.org/10.3390/electronics13101893
Chicago/Turabian StyleIbrahim, Muhammad Sohail, Muhammad Usman, and Jeong-A Lee. 2024. "ECHO: Energy-Efficient Computation Harnessing Online Arithmetic—An MSDF-Based Accelerator for DNN Inference" Electronics 13, no. 10: 1893. https://doi.org/10.3390/electronics13101893
APA StyleIbrahim, M. S., Usman, M., & Lee, J.-A. (2024). ECHO: Energy-Efficient Computation Harnessing Online Arithmetic—An MSDF-Based Accelerator for DNN Inference. Electronics, 13(10), 1893. https://doi.org/10.3390/electronics13101893