

Drone Safety and Security Surveillance System (D4S)


Abstract
1. Introduction
1.1. Unmanned Aerial Vehicles (UAVs)
1.2. Drone Applications in Civilian Safety and Security Operations
2. Materials and Methods
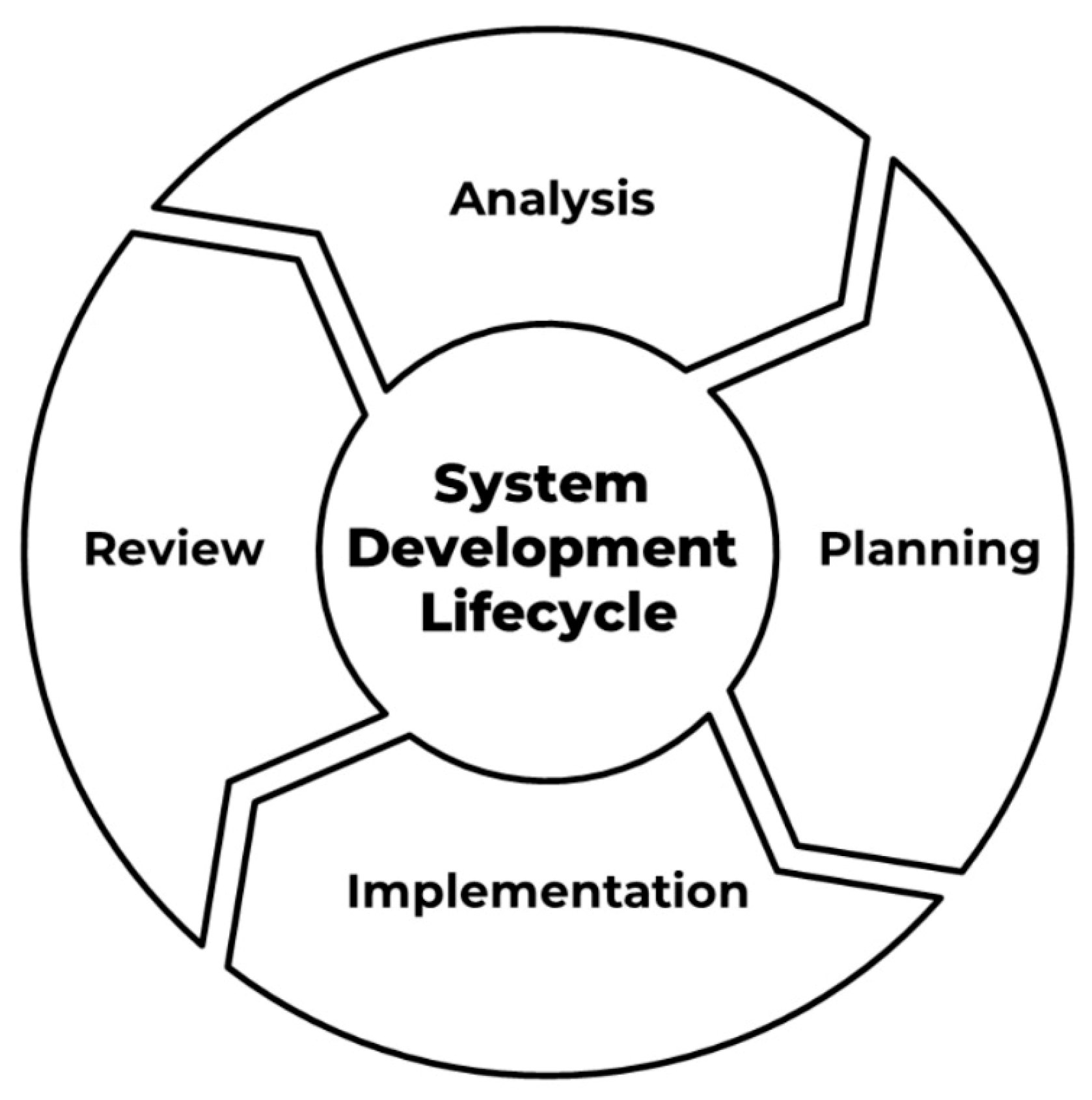
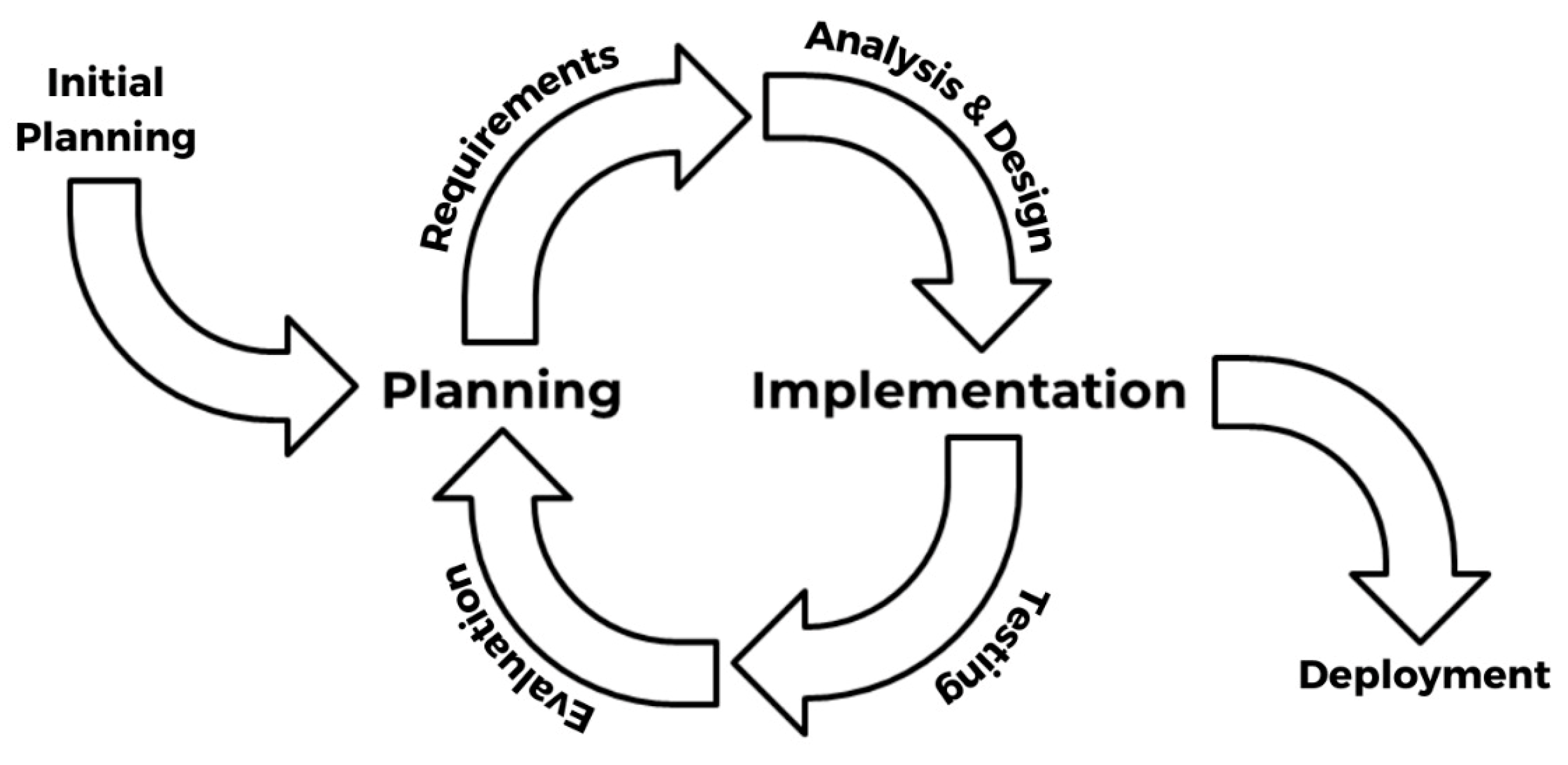
2.1. System Development Life Cycle (SDLC)
2.2. System Prototype
2.2.1. Design Method
2.2.2. Evaluation Method
2.2.3. Identifying Requirements and Functional Architecture
2.3. Basic-D4S
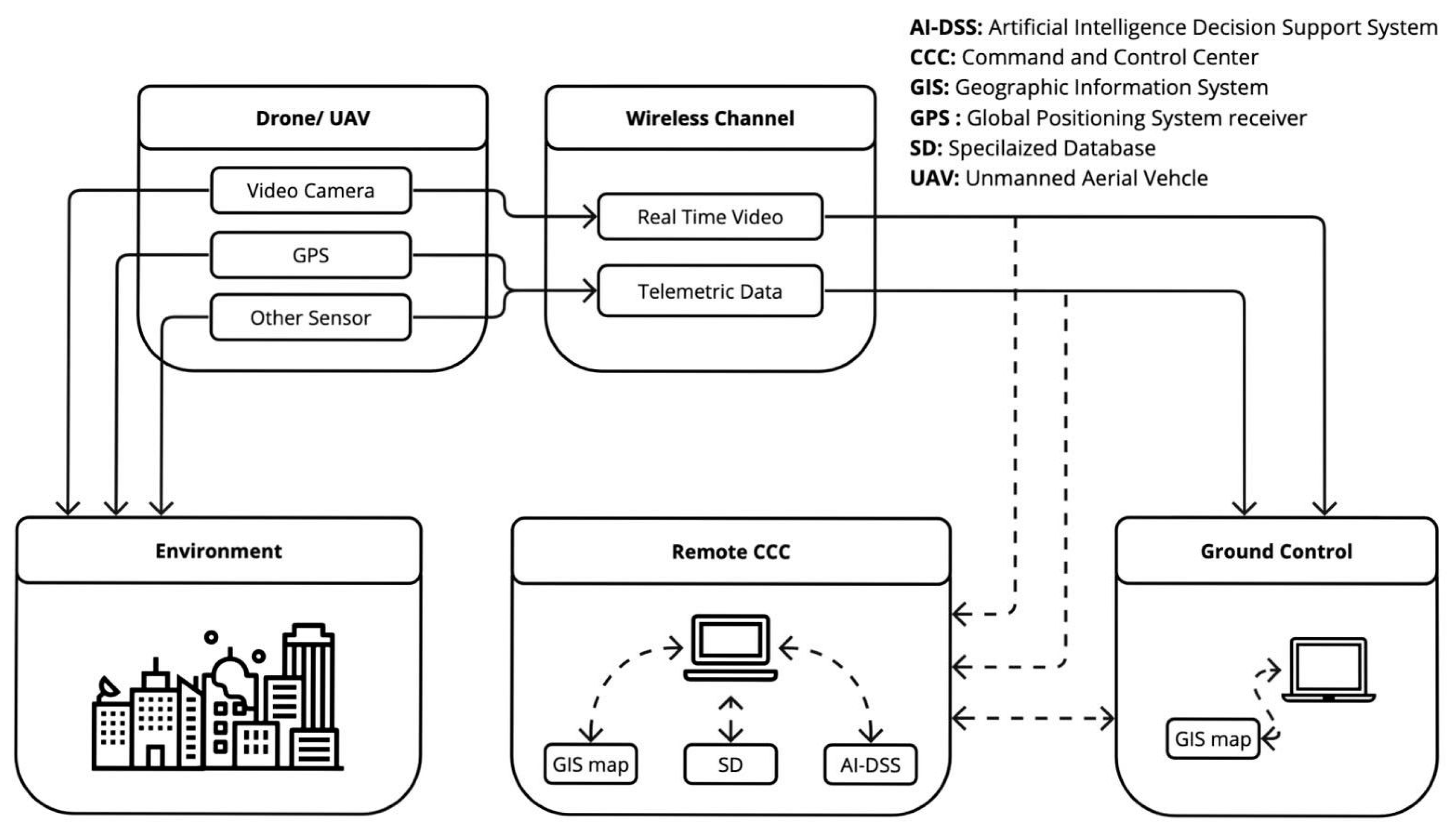
2.3.1. B-D4S Architecture
2.3.2. B-D4S Operation Concept
2.4. A-D4S
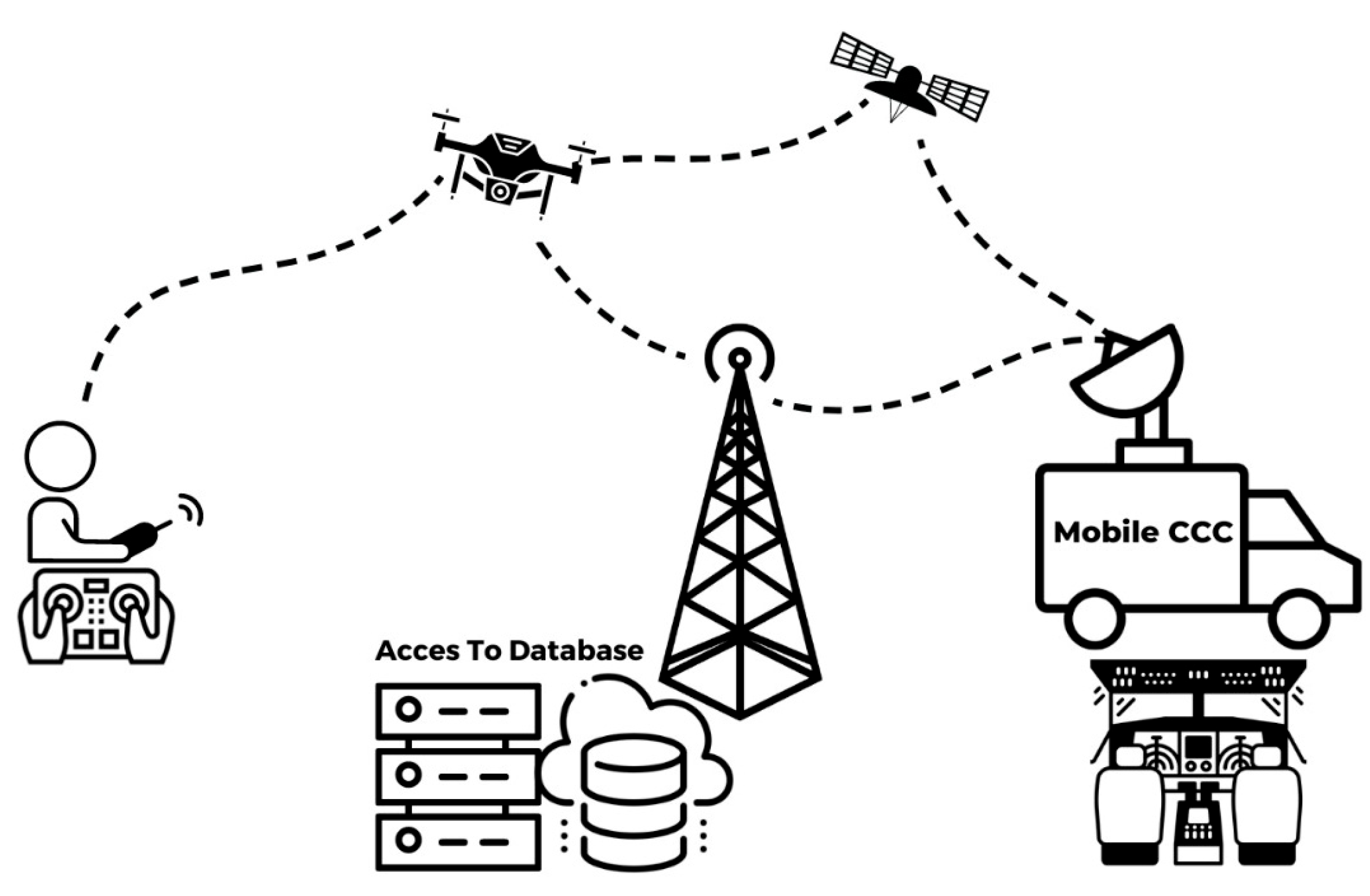
2.4.1. A-D4S Architecture
2.4.2. A-D4S Operation Concept
3. Results
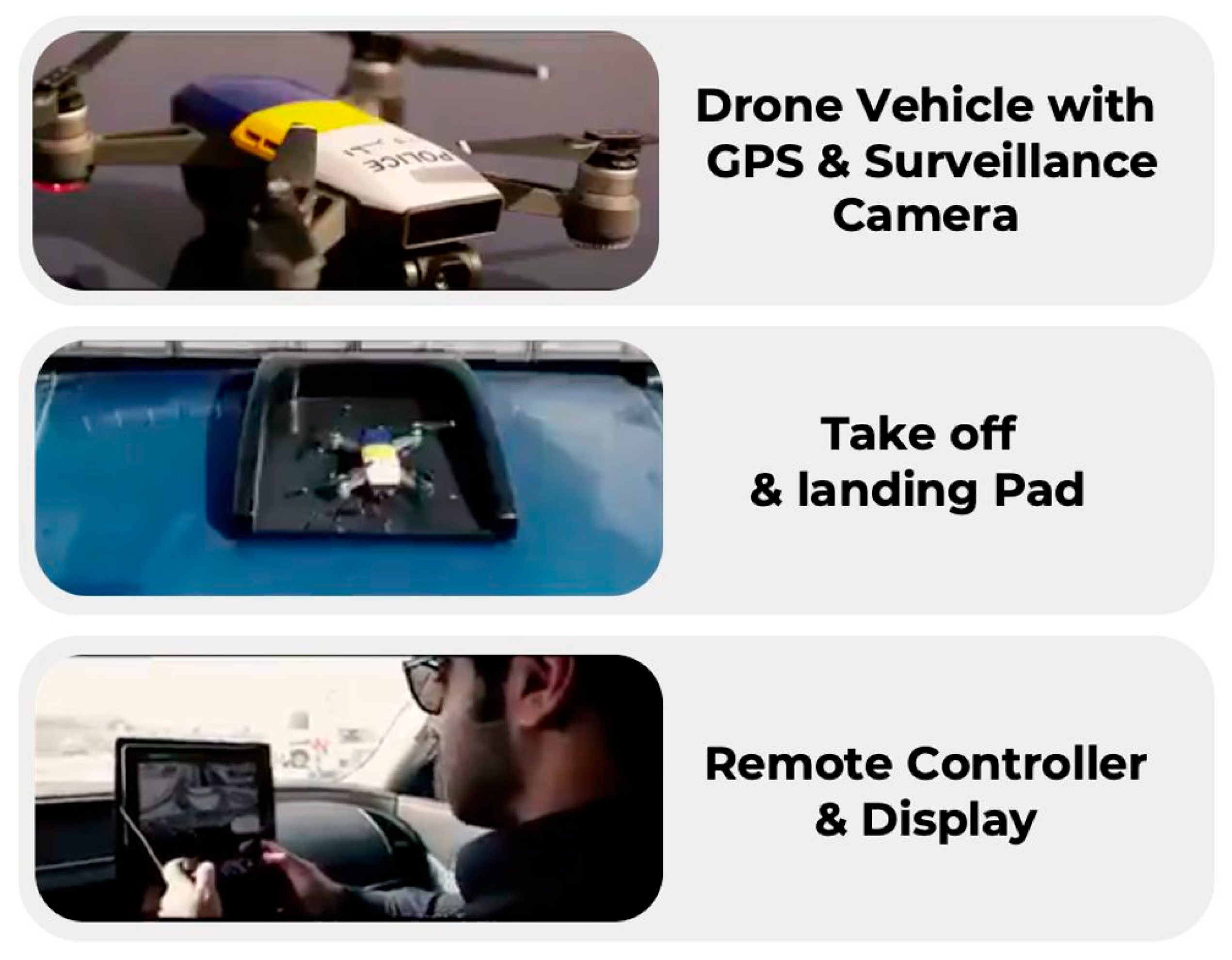
3.1. Prototype
3.2. Test Mission
3.3. Protype Evaluation Analysis
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Manrique, D.A.; Müller, C.T.; Mellado-Bataller, I. Drones for Search and Rescue Missions: A Survey. J. Intell. Rob. Syst. 2017, 88, 183–202. [Google Scholar]
- Nandi, A.; Zhang, T.; Larcher, A. A Review on Agricultural Drones and Their Applications. Comput. Electron. Agric. 2020, 174, 105507. [Google Scholar] [CrossRef]
- Soh, Y.M.; Ngo, T.T.; Yang, W. A Survey on Drone Delivery Systems. Electronics 2020, 9, 470. [Google Scholar] [CrossRef]
- Tran, K.N.; Shen, X. A Survey on Drone Applications: Security and Privacy Issues and Challenges. IEEE Commun. Surv. Tutorials 2019, 21, 2333–2360. [Google Scholar]
- Unmanned Aircraft Systems (UAS). Available online: https://www.faa.gov/uas/ (accessed on 30 August 2023).
- Al-Dosari, K.; Hunaiti, Z.; Balachandran, W. A Review of Civilian Drones’ Systems, Applications, Benefits, Safety, and Security Challenges. In The Effect of Information Technology on Business and Marketing Intelligence Systems; Alshurideh, M., Al Kurdi, B., Masa’deh, R., Salloum, S.A., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 793–812. [Google Scholar] [CrossRef]
- AL-Dosari, K.; Hunaiti, Z.; Balachandran, W. Civilian UAV Deployment Framework in Qatar. Drones 2023, 7, 46. [Google Scholar] [CrossRef]
- AL-Dosari, K.; Hunaiti, Z.; Balachandran, W. Systematic Review on Civilian Drones in Safety and Security Applications. Drones 2023, 7, 210. [Google Scholar] [CrossRef]
- Citroni, R.; Di Paolo, F.; Livreri, P. A Novel Energy Harvester for Powering Small UAVs: Performance Analysis, Model Validation and Flight Results. Sensors 2019, 19, 1771. [Google Scholar] [CrossRef]
- Abro, G.E.M.; Zulkifli, S.A.B.M.; Masood, R.J.; Asirvadam, V.S.; Laouti, A. Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones 2022, 6, 284. [Google Scholar] [CrossRef]
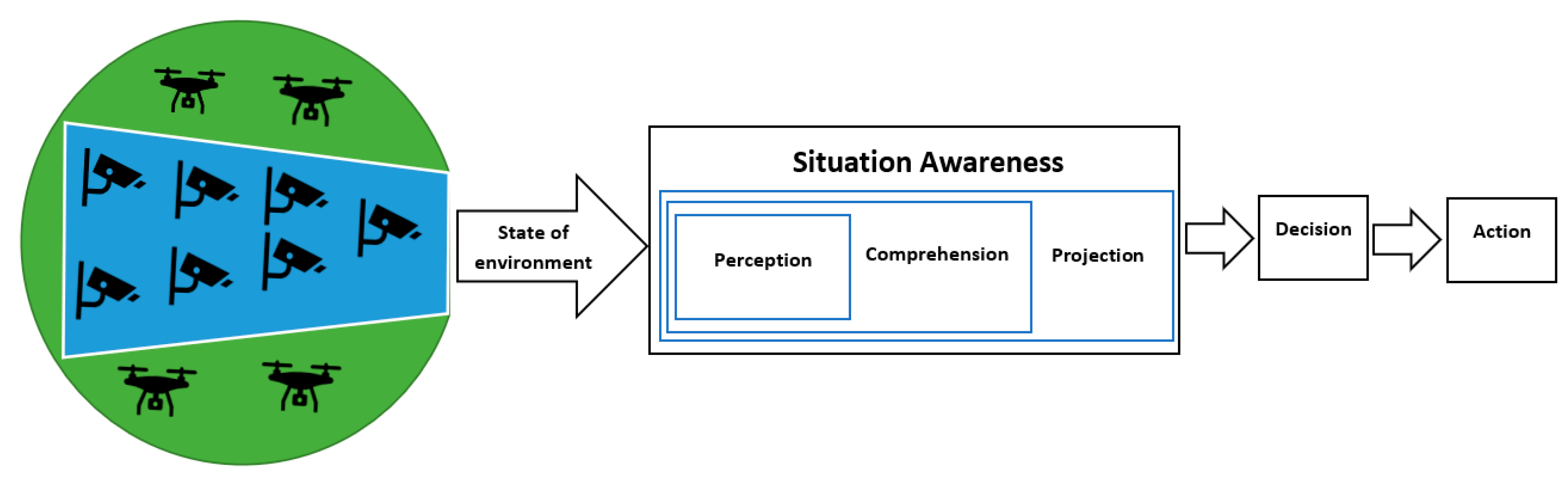
- Al-Dosari, K.; Hunaiti, Z.; Balachandran, W. Mega Sporting Event Scenario Analysis and Drone Camera Surveillance Impacts on Command-and-Control Centre Situational Awareness for Dynamic Decision-Making. Safety 2023, 9, 54. [Google Scholar] [CrossRef]
- Kramer, M. Best Practices in Systems Development Lifecycle: An Analyses Based on the Waterfall Model. Rev. Bus. Financ. Stud. 2018, 9, 77–84. [Google Scholar]
- Alshamrani, A.; Bahattab, A. A Comparison Between Three SDLC Models: Waterfall Model, Spiral Model, and Incremental/Iterative Model. Int. J. Comput. Sci. Issues 2015, 12, 106–111. [Google Scholar]
- Marangunić, N.; Granić, A. Technology Acceptance Model: A Literature Review from 1986 to 2013. Univers. Access Inf. Soc. 2015, 14, 81–95. [Google Scholar] [CrossRef]
- Davis, F.D. User Acceptance of Information Technology: System Characteristics, User Perceptions and Behavioral Impacts. Int. J. Man Mach. Stud. 1993, 38, 475–487. [Google Scholar] [CrossRef]
- Rigopoulos, G.; Psarras, J.; Askounis, D. A TAM Model to Evaluate User’s Attitude Towards Adoption of Decision Support Systems. J. Appl. Sci. 2008, 8, 899–902. [Google Scholar] [CrossRef]
- Money, W.; Turner, A. Application of the Technology Acceptance Model to a Knowledge Management System. In Proceedings of the 37th Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 5–8 January 2004; IEEE: New York, NY, USA, 2004; Volume 9. [Google Scholar] [CrossRef]
- Pressman, R.S. Software Engineering: A Practitioner’s Approach; McGraw-Hill Education: New York, NY, USA, 2014; ISBN 978-0078022128. [Google Scholar]
- Bello, A.B.; Navarro, F.; Raposo, J.; Miranda, M.; Zazo, A.; Álvarez, M. Fixed-wing UAV Flight Operation Under Harsh Weather Conditions: A Case Study in Livingston Island Glaciers, Antarctica. Drones 2022, 6, 384. [Google Scholar] [CrossRef]
- Javaid, A.Y.; Sun, W.; Devabhaktuni, V.K.; Alam, M. Cyber Security Threat Analysis and Modeling of an Unmanned Aerial Vehicle System. In Proceedings of the 2012 IEEE Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 13–15 November 2012; IEEE: New York, NY, USA, 2012; pp. 585–590. [Google Scholar] [CrossRef]
- Haque, S.R.; Kormokar, R.; Zaman, A.U. Drone Ground Control Station with Enhanced Safety Features. In Proceedings of the 2017 2nd International Conference for Convergence in Technology (I2CT), Mumbai, India, 7–9 April 2017; IEEE: New York, NY, USA, 2017; pp. 1207–1210. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Ali, H.; Hang, L.Y.; Suan, T.Y.; Polaiah, V.R.; Aluwi, M.I.F.; Zabidi, A.M.; Elshaikh, M. Development of Surveillance Drone Based Internet of Things (IoT) for Industrial Security Applications. J. Phys. Conf. Ser. 2021, 2107, 012018. [Google Scholar] [CrossRef]
- Dilshad, N.; Hwang, J.; Song, J.; Sung, N. Applications and Challenges in Video Surveillance Via Drone: A Brief Survey. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 21–23 October 2020; IEEE: New York, NY, USA, 2020; pp. 728–732. [Google Scholar] [CrossRef]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Charging Techniques for UAV-assisted Data Collection: Is Laser Power Beaming the Answer? IEEE Commun. Mag. 2022, 60, 50–56. [Google Scholar] [CrossRef]
- Fahlstrom, P.G.; Gleason, T.J.; Sadraey, M.H. Introduction to UAV Systems, 5th ed.; John Wiley & Sons: London, UK, 2022; ISBN 978-1119802617. [Google Scholar]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; IEEE: New York, NY, USA, 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Cezar, P.O.P.A.; Mitulețu, I. State-of-the-art Technologies to be Used in Command and Control Systems. Bull. Carol I Natl. Def. Univ. 2021, 10, 54–63. [Google Scholar] [CrossRef]
- Burke, C.; McWhirter, P.R.; Veitch-Michaelis, J.; McAree, O.; Pointon, H.A.; Wich, S.; Longmore, S. Requirements and Limitations of Thermal Drones for Effective Search and Rescue in Marine and Coastal Areas. Drones 2019, 3, 78. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, F.; Zhang, B.; Ma, R.; Hao, Q. Development of UAV-based Target Tracking and Recognition Systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3409–3422. [Google Scholar] [CrossRef]
- Eckstrom, D.R. Facial Recognition Software for Patrol. White Paper, Arlington Police Department. 2020. Available online: https://shsu-ir.tdl.org/server/api/core/bitstreams/0dd66bae-5f31-44f6-af51-ea19737d2641/content (accessed on 20 August 2023).
- Rigano, C. Using Artificial Intelligence to Address Criminal Justice Needs. Nat. Inst. Justice J. 2019, 280, 17. [Google Scholar]
- Pranav, D.S.; Dubey, T.; Singh, J. A Literature Review: Artificial Intelligence in Public Security and Safety. EasyChair 2020; Preprint no. 4578. Available online: https://easychair.org/publications/preprint/KHQL (accessed on 30 August 2023).
- Hopper, D. DJI Air 2S. Aust. Photogr. 2021, 62–64. Available online: https://www.dji.com/uk/air-2s (accessed on 20 August 2023).
- Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors 2021, 21, 2057. [Google Scholar] [CrossRef] [PubMed]
- McNeish, D.M. Thanks Coefficient Alpha, We’ll Take It from Here. Psychol. Methods 2017, 23, 412–433. [Google Scholar] [CrossRef] [PubMed]
- Atmanspacher, H.; Martin, M. Correlations and How to Interpret Them. Information 2019, 10, 272. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Construct Items | |
|---|---|
| Perceived Usefulness (PU) | 1. With the new D4S, decisions are easier. 2. With the new D4S, decisions are more accurate. 3. With the new D4S, decisions are faster. |
| Perceived Ease of Use (PEoU) | 1. The new D4S is easy to use. 2. The new D4S and methodology are easy to understand. |
| Behavioral Intention to Use (BI2U) | 1. I think that using the new D4S is a good idea. 2. I think that using the new D4S is beneficial. 3. I have a positive prescription about using the new D4S. |
| Usage | 1. I intend to use the new D4S. 2. I intend to use the D4S instead of the traditional procedure. |
| No. | Hypothesis |
|---|---|
| H1 | PU positively affects BI2U. |
| H2 | PEoU has a strong indirect positive relationship with BI2U. |
| H3 | PEoU has a less strong direct positive relationship with BI2U. |
| H4 | BI2U has a strong positive impact on system usage. |
| H5 | PU and PEoU have a strong positive impact on BI2U. |
| Item | Recommendation | Justification |
|---|---|---|
| Drone vehicle | Portable | To support line-of-sight (LOS) civilian security and safety applications within normal patrolling missions [20] |
| Easy to operate and deploy | ||
| Can handle mild weather conditions | ||
| Good life cycle and easy to maintain | ||
| Communication link | Short range, secure, and reliable | For safe and effective operations [21] |
| Ground control unit | Portable | Easy to carry, operate, and navigate based on received video images [22] |
| With HD Display | ||
| GPS | Accuracy for urban and open space navigation | For navigation and location tagging [23] |
| Surveillance camera | HD with night vision | For better awareness and investigation outcomes, navigation, and night operation [24] |
| Video recording facility | Based on the nature and duration of operations it is used for | For later retrieval, for decumulations, data collection, investigation, training, etc. [25] |
| High battery life | Long enough to complete the whole mission | To avoid operation interruption and risk of losing the drone vehicle [23] |
| Onboard charging facility | Wired/wireless charging or other technology | To sustain longer missions [26] |
| Light | LED | Navigation, searching, investigation, etc. |
| Item | Recommendation | Justification |
|---|---|---|
| Drone vehicle | Different take-off options Can sustain harsh weather conditions | To support advanced LOS or non-LOS safety and security applications while sharing the national airspace [20] |
| Payload option | Depends on operation | To support shipments (e.g., first aid and food packages) [27] |
| Communication link | Very secure, medium range, and reliable (with backup channel) | For safe and effective remote and beyond-LOS operations [21] |
| Ground control unit | Stationary or portable | To be operated with an on-field pilot [22] |
| With HD display | ||
| Command-and-control center unit | Mobile and stationary | To support advanced remote, LOS, or beyond-LOS safety and security applications while sharing national airspace [28,29] |
| Supports multi-vehicle monitoring | ||
| GIS mapping database | ||
| Can process voice, video, and data | ||
| Access to specialized database | ||
| Facilitates AI ingratiation | ||
| Multi-displays | ||
| GPS | High accuracy for urban operations (based on application needed) | For navigation and location data [23] |
| Surveillance camera | HD | For better awareness and investigation outcomes, navigation, and night operation [24] |
| Night vision | ||
| Multi-angles | ||
| Video recording facility | HD and high capacity | For later retrieval, decumulations, investigation, training, etc. [25] |
| High battery life | Hours | To sustain longer missions [23] |
| Onboard charging facility | Wired and/or other options | To sustain long operations and avoid losing the drone vehicle [26] |
| Light | LED | Navigation, searching, investigation, etc. [30] |
| GIS mapping dataset | Regional or national level | Navigation, tracking, investigation, and tagging [31] |
| Access to specialized database (e.g., offenders database) | Based on customizable operational needs | To support better decision making [32] |
| AI prediction algorithms (e.g., crowd detection, abnormal behavior, facial recognition) | Suitable for operation within crowded and urban environments | To support better decision making [33,34] |
| Sensor array (e.g., fire, nose, and thermal detectors and anti-collision sensors) | Based on application requirements | Environmental sensing, risk assessment data gathering, and safe operations [30] |
| Item | Requirement | Data Sheet Justification | Matching |
|---|---|---|---|
| Drone vehicle | Portable | 595 g | ✔ |
| Easy to operate and deploy | Yes | ✔ | |
| Can handle mild weather conditions | Stabilization; 3-axis (tilt, roll, pan) | ✔ | |
| Good life cycle and easy to maintain | ✔ | ||
| Communication link | Short range, secure, and reliable | O3 2.4 GHz/5.8 GHz Auto-Switching (compatible with OcuSync 2.0) 4-antenna 2T4R | ✔ |
| Ground control unit | Portable | 5472 × 3078 @ 24/25/30 fps | ✔ |
| With HD display | |||
| GPS | Accuracy for urban- and open-space navigation | GPS + GLONASS + GALILEO | ✔ |
| Surveillance camera | HD with night vision | 5.4 K | ✔ |
| Video recording facility | Based on the nature and duration of operational use | Supports a microSD card with a capacity of up to 256 G | ✔ |
| High battery life | The longer the better | Approx. 4 h | ✔ |
| Onboard charging facility | Wired/wireless charging or other technology | NO | ✘ |
| Light | LED | Single LED | ✔ |
| Construct | Cronbach’s Alpha |
|---|---|
| PU | 0.93 |
| PEoU | 0.88 |
| BI2U | 0.98 |
| Usage | 0.91 |
| Construct | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
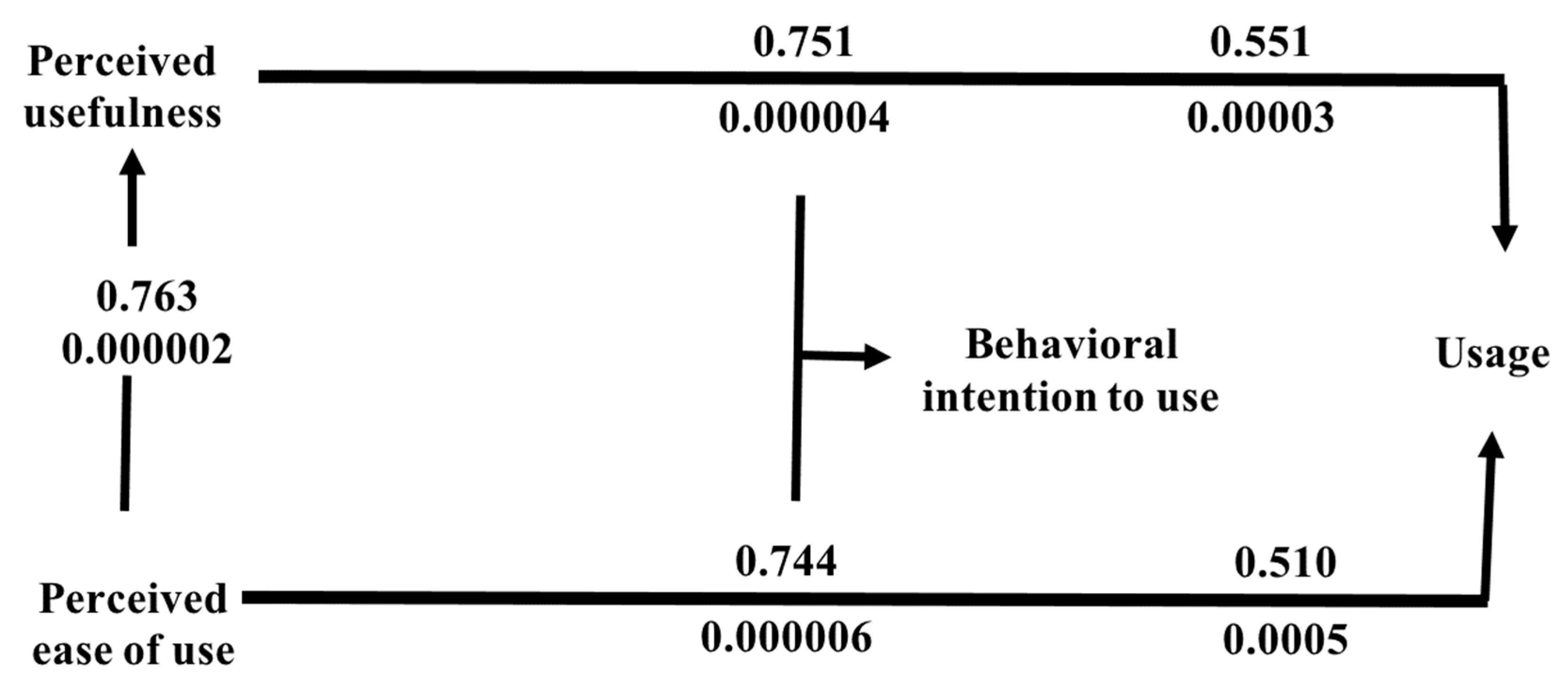
| PU | 1 | 0.763 ** | 0.751 ** | 0.551 ** |
| PEoU | 0.763 ** | 1 | 0.744** | 0.510 ** |
| BI2U | 0.751 ** | 0.744 ** | 1 | 0.345 ** |
| Usage | 0.551 ** | 0.510 ** | 0.345 ** | 1 |
| No. | Hypothesis | Support |
|---|---|---|
| H1 | PU positively affects BI2U. | Yes |
| H2 | PEoU has a strong indirect positive relationship with BI2U. | Yes |
| H3 | PEoU will have a less strong direct positive relationship with BI2U. | Yes |
| H4 | BI2U has a strong positive impact on system usage. | Yes |
| H5 | PU and PEoU have a strong positive impact on BI2U. | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
AL-Dosari, K.; Hunaiti, Z.; Balachandran, W. Drone Safety and Security Surveillance System (D4S). Appl. Sci. 2024, 14, 4193. https://doi.org/10.3390/app14104193
AL-Dosari K, Hunaiti Z, Balachandran W. Drone Safety and Security Surveillance System (D4S). Applied Sciences. 2024; 14(10):4193. https://doi.org/10.3390/app14104193
Chicago/Turabian StyleAL-Dosari, Khalifa, Ziad Hunaiti, and Wamadeva Balachandran. 2024. "Drone Safety and Security Surveillance System (D4S)" Applied Sciences 14, no. 10: 4193. https://doi.org/10.3390/app14104193
APA StyleAL-Dosari, K., Hunaiti, Z., & Balachandran, W. (2024). Drone Safety and Security Surveillance System (D4S). Applied Sciences, 14(10), 4193. https://doi.org/10.3390/app14104193