
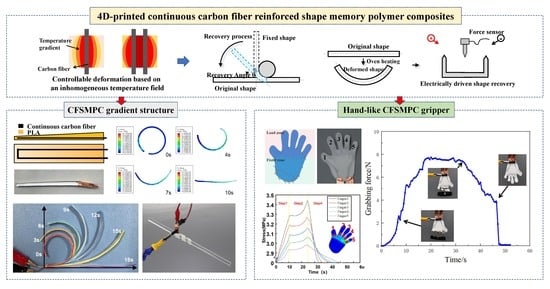
Four-Dimensionally Printed Continuous Carbon Fiber-Reinforced Shape Memory Polymer Composites with Diverse Deformation Based on an Inhomogeneous Temperature Field





Abstract
:
1. Introduction
2. Materials and Methods
2.1. Materials
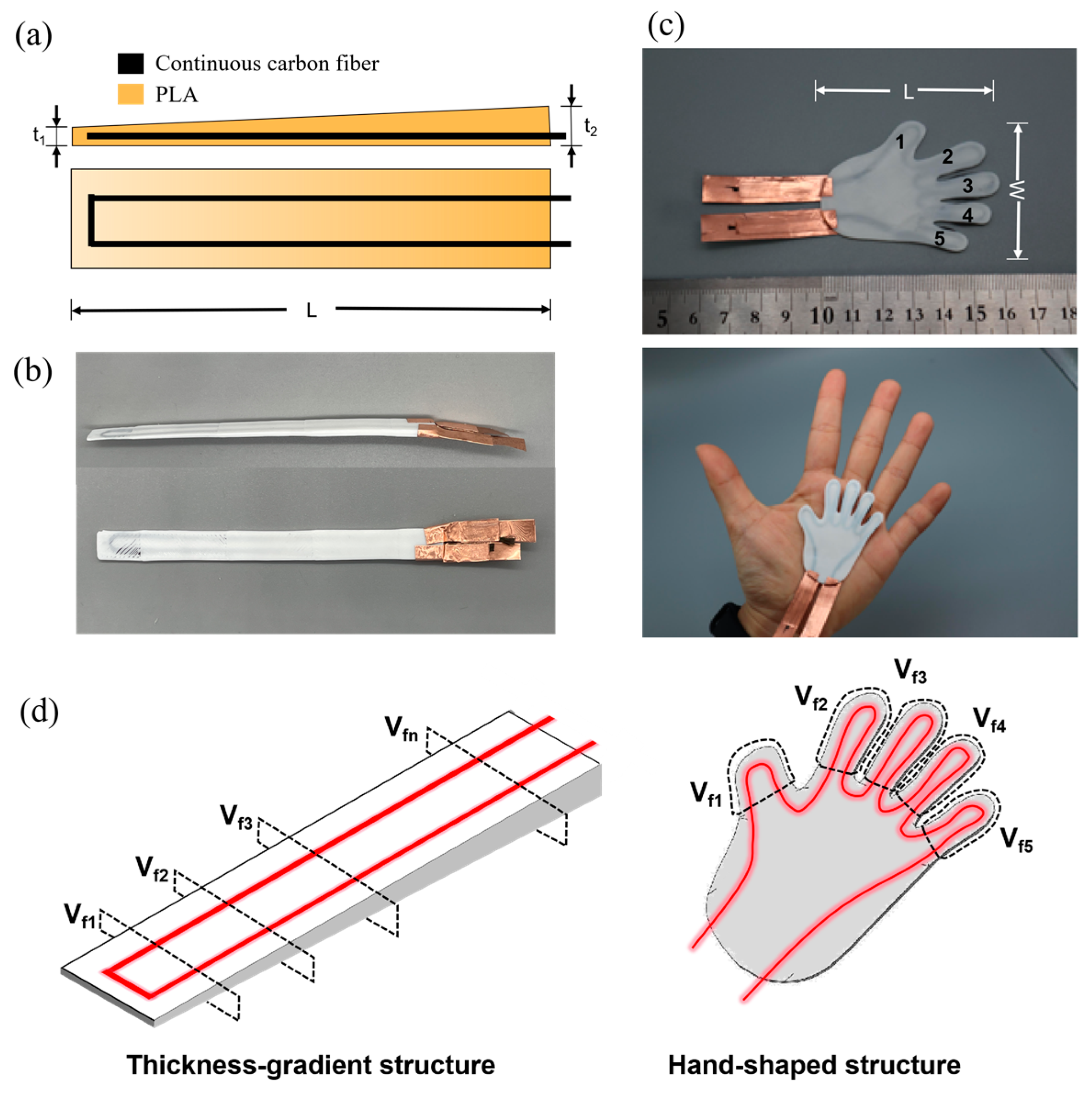
2.2. Design and Preparation of CFSMPC Structures
2.3. Electrically Driven Shape Memory Test
2.3.1. Test Methods
2.3.2. Electrically Driven Shape Memory Test of the Thickness Gradient Structure
2.3.3. Electrically Driven Shape Memory Test of the Hand-like Structure
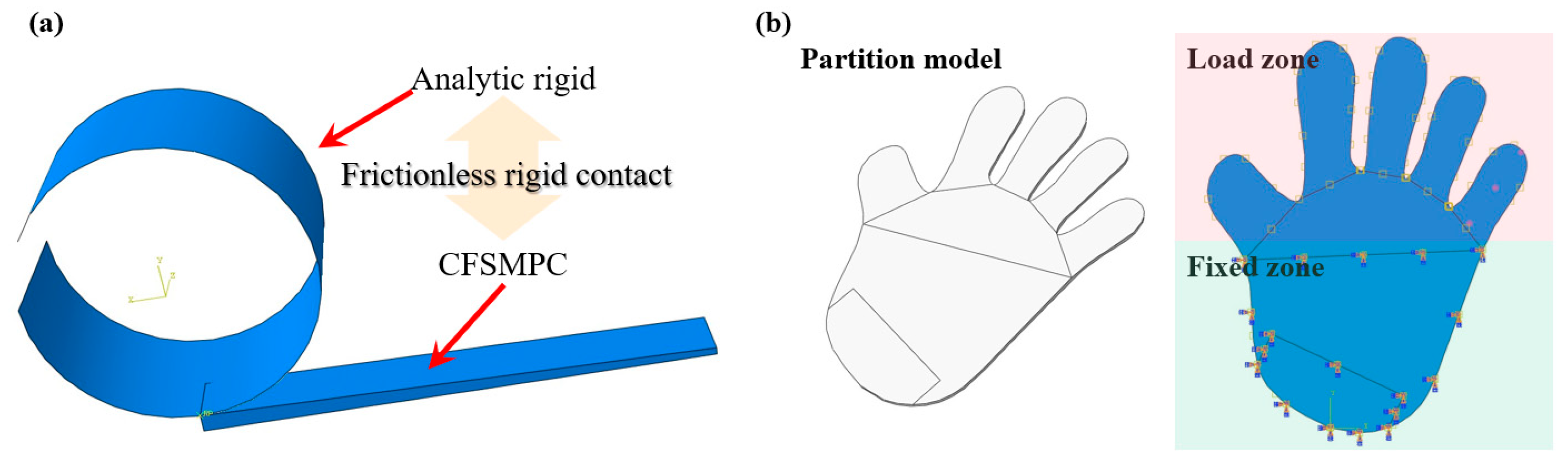
2.4. Finite Element Modeling
3. Results and Discussion
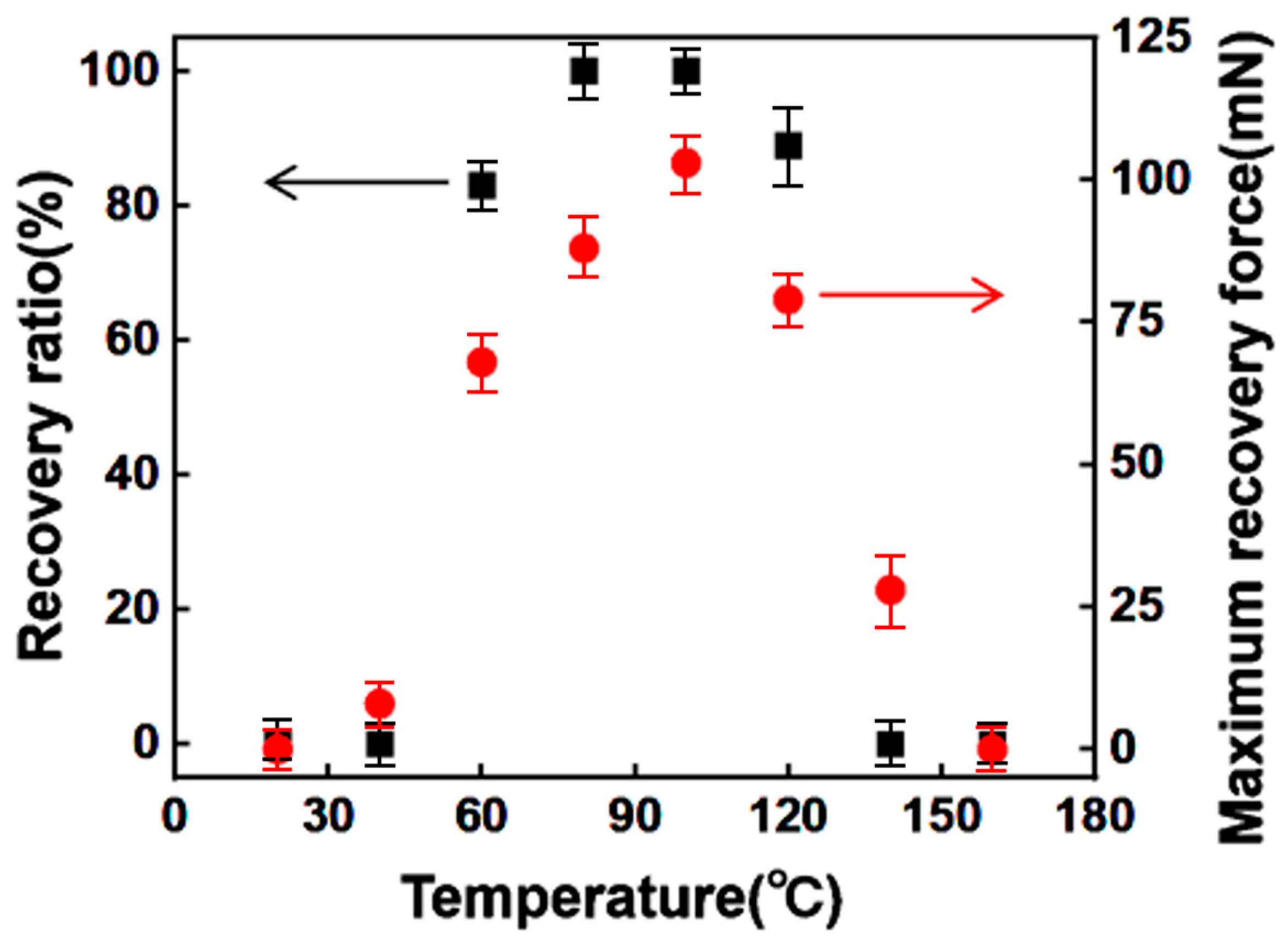
3.1. Effect of Temperature on the Shape Memory Performance of the PLA
3.2. Shape Memory Performance Electrically Driven by the Thickness Gradient Structure
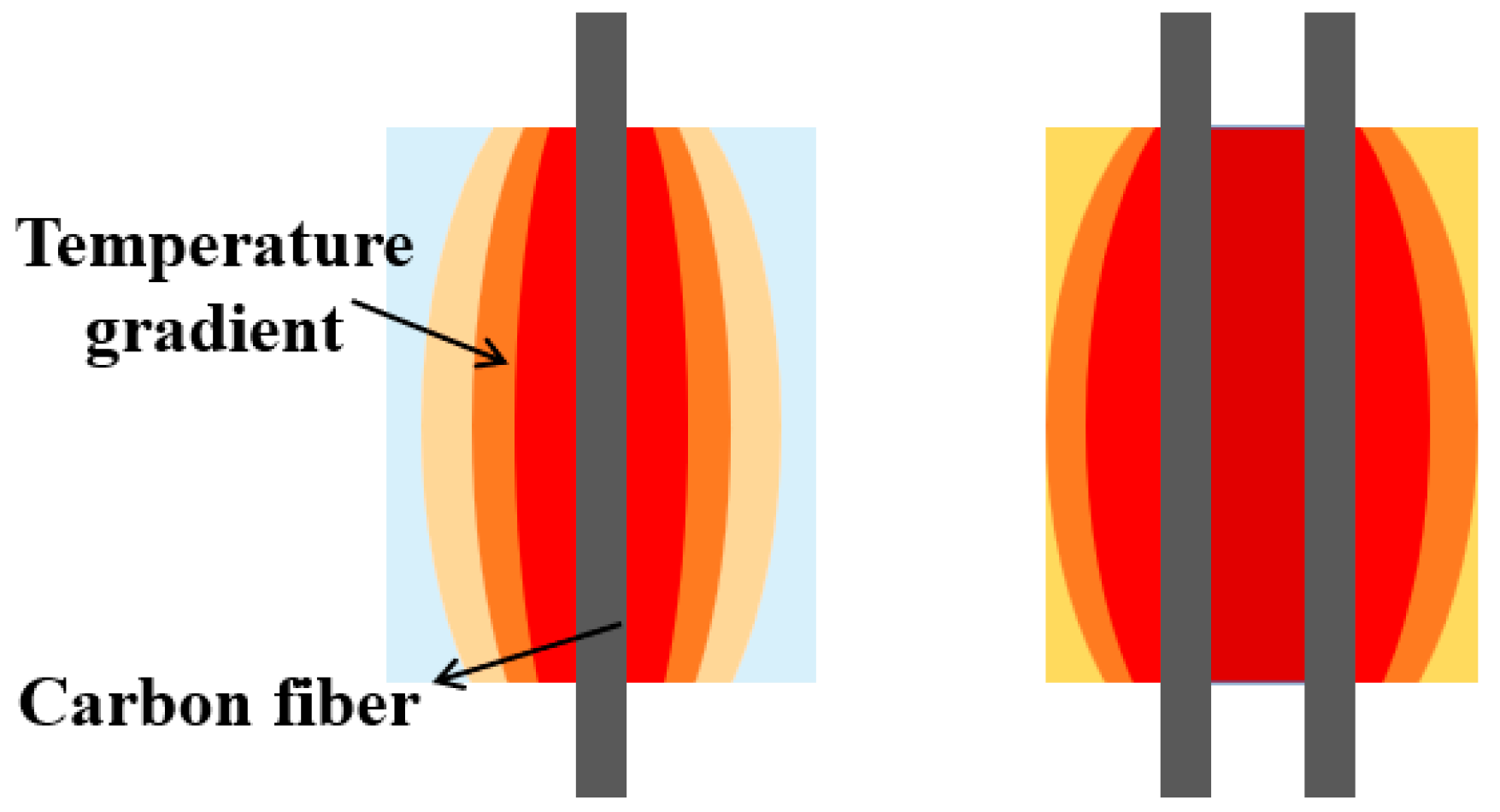
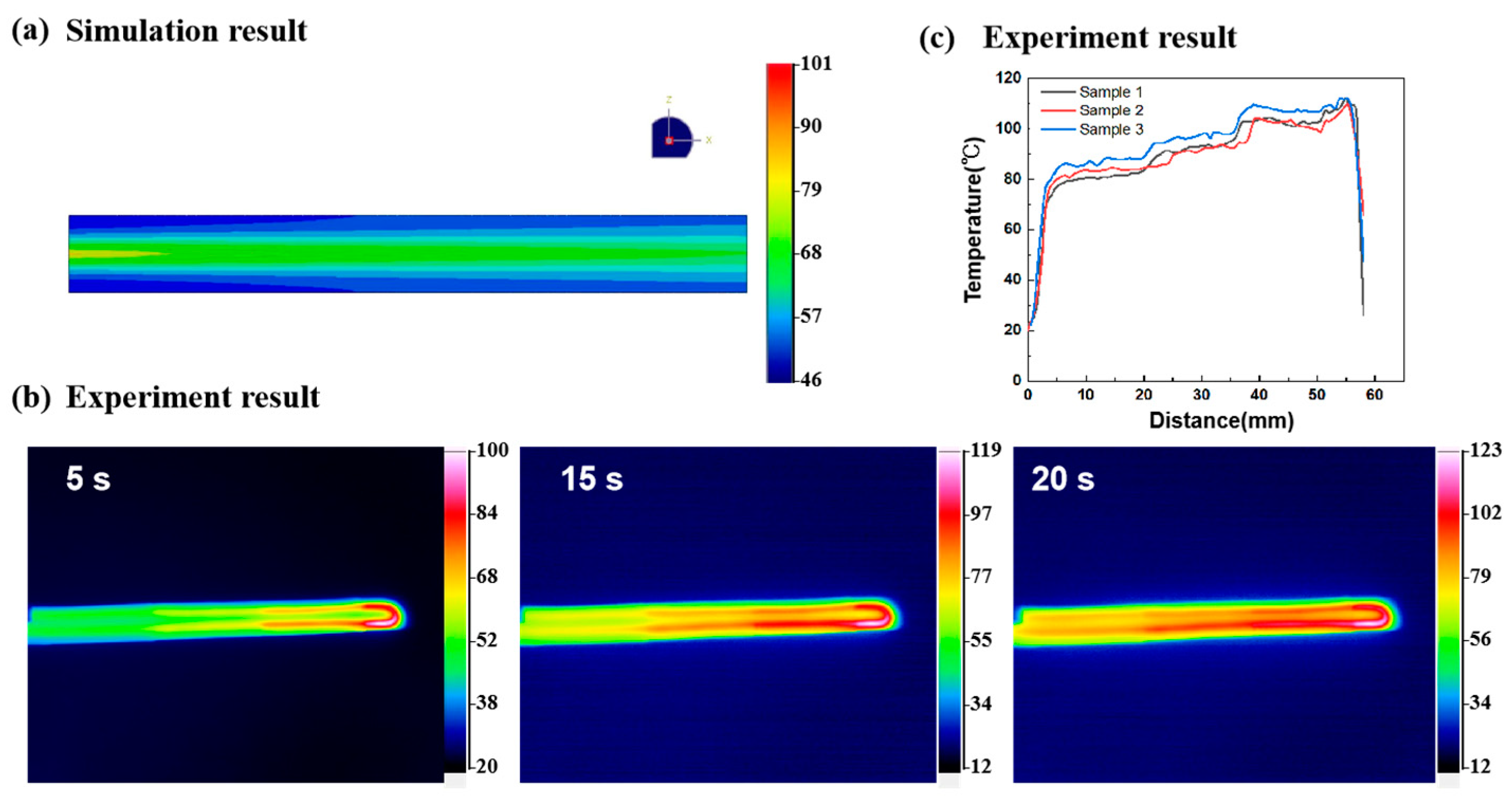
3.2.1. The Thermal Temperature Field of the CFSMPC Thickness Gradient Structure
3.2.2. The Shape Recovery Process of the CFSMPC Thickness Gradient Structure
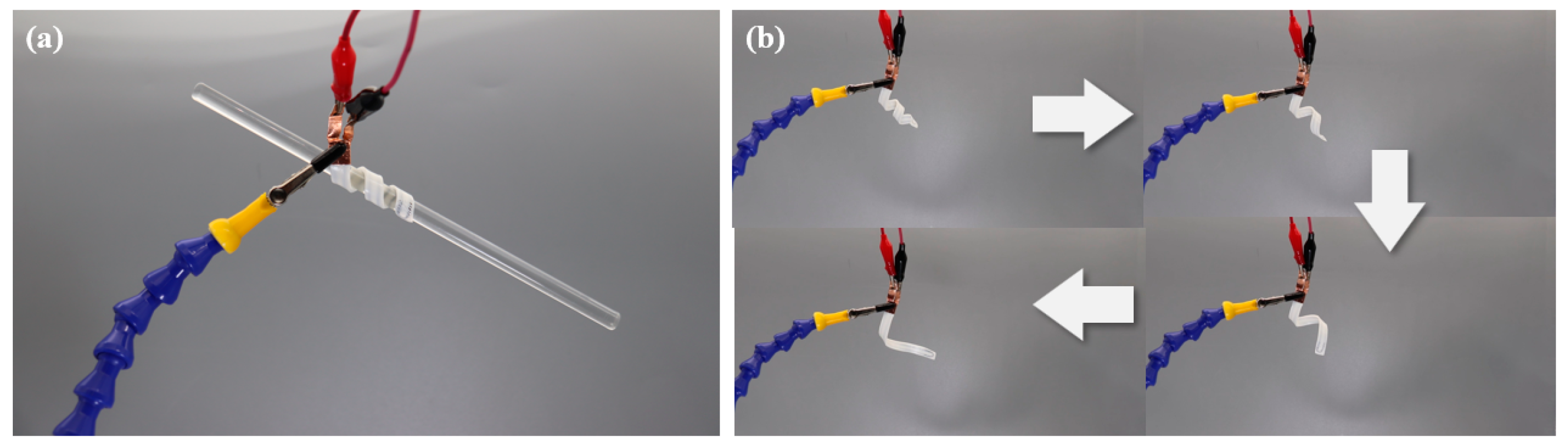
3.2.3. Grasp Demonstration of the CFSMPC Thickness Gradient Structure
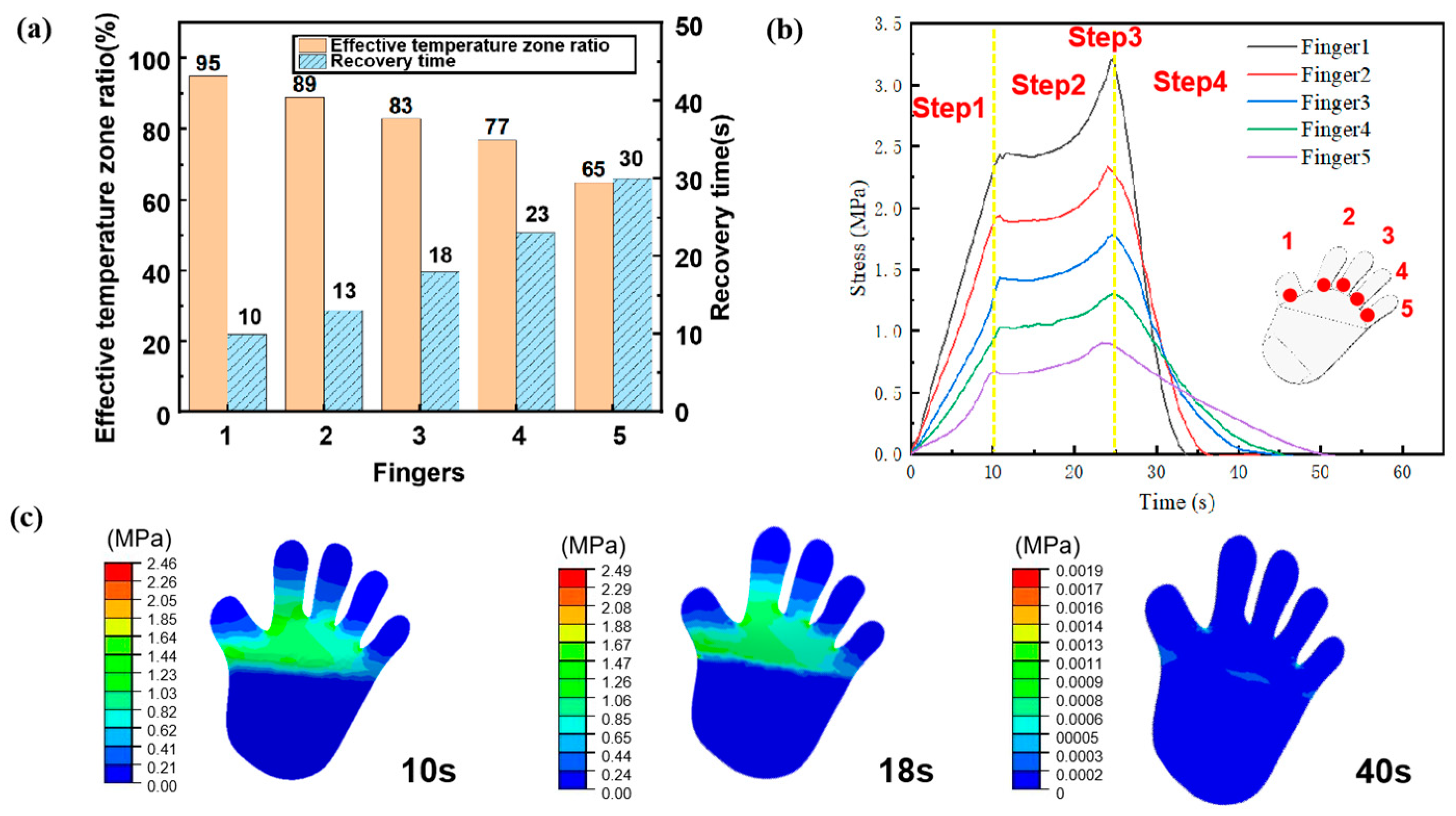
3.3. Shape Memory Performance of the Electrically Driven CFSMPC Hand-Shaped Structure
3.3.1. Simulation Results
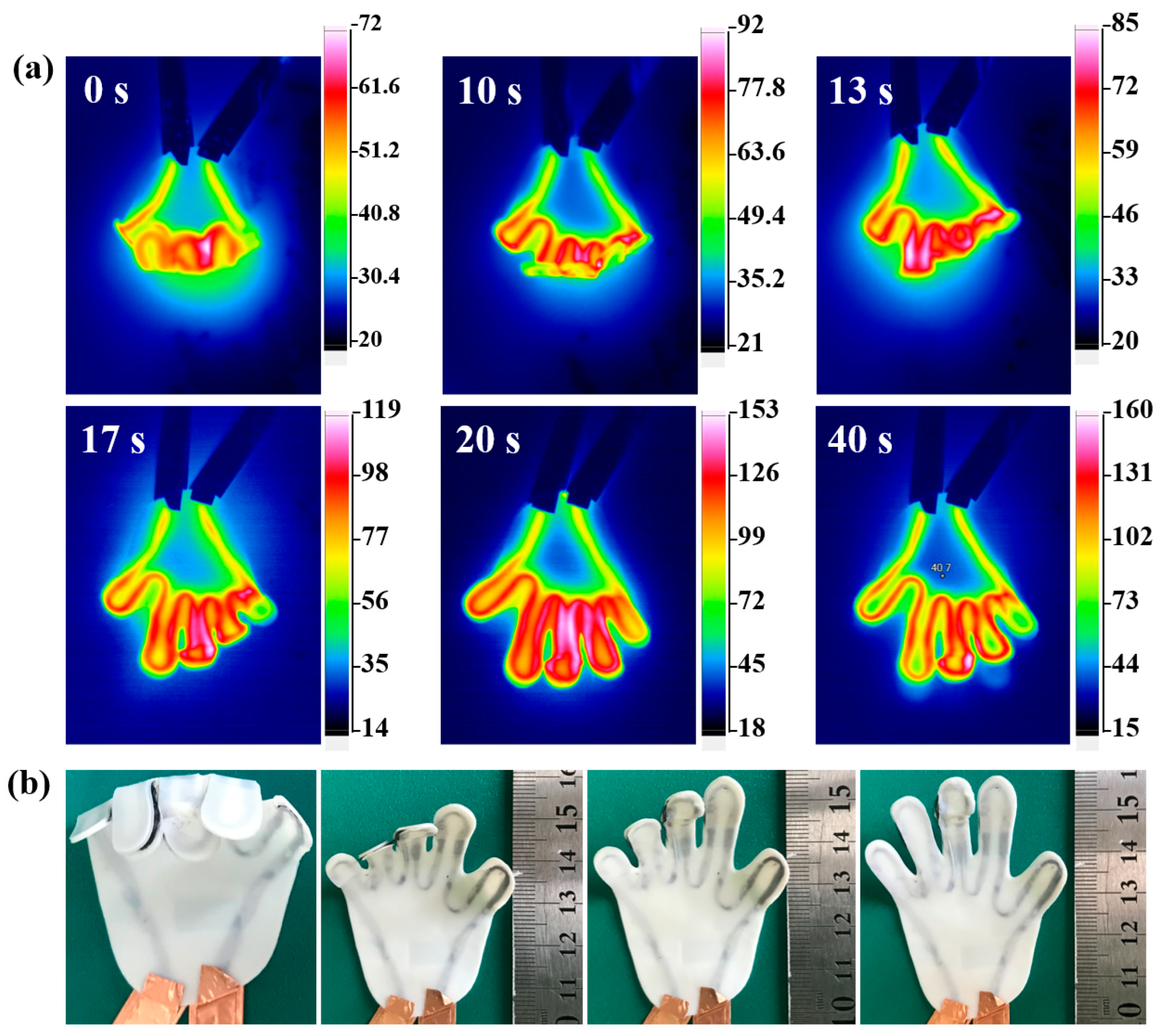
3.3.2. Experimental Results
3.3.3. Grip Demonstration of the Hand-like CFSMPC Hand-Shaped Structure
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Ge, Q.; Qi, H.J.; Dunn, M.L. Active materials by four-dimension printing. Appl. Phys. Lett. 2013, 103, 131901. [Google Scholar] [CrossRef]
- Smela, E. Conjugated polymer actuators for biomedical applications. Adv. Mater. 2003, 15, 481–494. [Google Scholar] [CrossRef]
- Wang, M.F.; Maleki, T.; Ziaie, B. Enhanced 3-D folding of silicon microstructures via thermal shrinkage of a composite organic/inorganic bilayer. J. Microelectromechanical Syst. 2008, 17, 882–889. [Google Scholar] [CrossRef]
- Yasu, K.; Inami, M. Popapy: Instant paper craft made up in a microwave oven. In Proceedings of the 9th International Conference, ACE 2012, Kathmandu, Nepal, 3–5 November 2012. [Google Scholar]
- Rousseau, I.A. Challenges of shape memory polymers: A review of the progress toward overcoming SMP’s limitations. Polym. Eng. Sci. 2010, 48, 2075–2089. [Google Scholar] [CrossRef]
- Herath, H.M.C.M.; Epaarachchi, J.A.; Islam, M.M.; Al-Azzawi, W.; Leng, J.; Zhang, F. Structural performance and photothermal recovery of carbon fibre reinforced shape memory polymer. Compos. Sci. Technol. 2018, 167, 206–214. [Google Scholar] [CrossRef]
- Ivens, J.; Urbanus, M.; De Smmet, C. Shape recovery in a thermoset shape memory polymer and its fabric-reinforced composites. Express Polym. Lett. 2011, 5, 3. [Google Scholar] [CrossRef]
- Liu, X.; Li, H.; Zeng, Q.; Zhang, Y.; Kang, H.; Duan, H.; Guo, Y.; Liu, H. Electro-active shape memory composites enhanced by flexible carbon nanotube/graphene aerogels. J. Mater. Chem. A 2015, 3, 11641–11649. [Google Scholar] [CrossRef]
- Korotkov, R.; Vedernikov, A.; Gusev, S.; Alajarmeh, O.; Akhatov, I.; Safonov, A. Shape memory behavior of unidirectional pultruded laminate. Compos. Part A Appl. Sci. Manuf. 2021, 150, 106609. [Google Scholar] [CrossRef]
- Zeng, C.; Liu, L.; Bian, W.; Liu, Y.; Leng, J. 4D printed electro-induced continuous carbon fiber reinforced shape memory polymer composites with excellent bending resistance. Compos. Part B Eng. 2020, 194, 108034. [Google Scholar] [CrossRef]
- Pei, E. 4D printing: Dawn of an emerging technology cycle. Assem. Autom. 2014, 34, 310–314. [Google Scholar] [CrossRef]
- Gladman, A.S.; Matsumoto, E.A.; Nuzzo, R.G.; Mahadevan, L.; Lewis, J.A. Biomimetic 4D printing. Nat. Mater. 2016, 15, 413. [Google Scholar] [CrossRef]
- Tao, R.; Xi, L.; Wu, W.; Li, Y.; Liao, B.; Liu, L.; Leng, J.; Fang, D. 4D printed multi-stable metamaterials with mechanically tunable performance. Compos. Struct. 2020, 252, 112663. [Google Scholar] [CrossRef]
- Nojoomi, A.; Arslan, H.; Lee, K.; Yum, K. Bioinspired 3D structures with programmable morphologies and motions. Nat. Commun. 2018, 9, 3705. [Google Scholar] [CrossRef] [PubMed]
- Yan, Q.; Mao, L.; Feng, B.; Zhang, L.; Wu, Y.; Huang, W. Reversible Patterning Cross-Linked, Humidity-Responsive Polymer Films with Programmatically and Accurately Controlled Deformation. Acs Appl. Mater. Inter. 2021, 13, 7608–7616. [Google Scholar] [CrossRef]
- Jones, T.J.; Jambon-Puillet, E.; Marthelot, J.; Brun, P.T. Bubble casting soft robotics. Nature 2021, 599, 229–233. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Yu, C.Y.; Serrano, P.A.A.; Ahn, S.-H. Soft grasping mechanisms composed of shape memory polymer based self-bending units. Compos. Part B Eng. 2019, 164, 198–204. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, T.; Wang, G.; Liu, J.; Zhao, L.; Zhang, R.; Yu, Y. Intelligent Response Bilayer Hydrogel with Controllable Deformation-Recovery and Shape Memory. Eur. Polym. J. 2021, 150, 110399. [Google Scholar] [CrossRef]
- Stoychev, G.; Zakharchenko, S.; Turcaud, S.; Dunlop, J.W.; Ionov, L. Shape-Programmed Folding of Stimuli-Responsive Polymer Bilayers. ACS Nano 2012, 6, 3925–3934. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Li, C.; Cho, M.; Ahn, S.H. Soft Tendril-Inspired Grippers: Shape Morphing of Programmable Polymer-Paper Bilayer Composites. ACS Appl. Mater. Inter. 2018, 10, 10419–10427. [Google Scholar] [CrossRef]
- Wu, J.; Yuan, C.; Ding, Z.; Isakov, M.; Mao, Y.; Wang, T.; Dunn, M.L.; Qi, H.J. Multi-shape active composites by 3D printing of digital shape memory polymers. Sci. Rep. 2016, 6, 24224. [Google Scholar] [CrossRef] [PubMed]
- Yuan, C.; Wang, T.; Dunn, M.L. 3D printed active origami with complicated folding patterns. Int. J. Precis. Eng. Manuf.-Green Technol. 2017, 4, 281–289. [Google Scholar] [CrossRef]
- Madden, J.D. Mobile robots: Motor challenges and materials solutions. Science 2007, 318, 1094. [Google Scholar] [CrossRef] [PubMed]
- Baughman, R.H. Materials science. Playing nature’s game with artificial muscles. Science 2005, 308, 63–65. [Google Scholar] [CrossRef] [PubMed]
- Kong, L.; Chen, W. Carbon Nanotube/Graphene based Bio-inspired Electrochemical Actuator. In Proceedings of the 2nd International Congress on Advanced Materials, Zhenjiang, China, 16–19 May 2013. [Google Scholar]
- Lu, H.; Lei, M.; Zhao, C.; Xu, B.; Leng, J.; Fu, Y.Q. Structural design of flexible Au electrode to enable shape memory polymer for electrical actuation. Smart Mater. Struct. 2015, 24, 045015. [Google Scholar] [CrossRef]
- Lu, H.; Lei, M.; Zhao, C.; Yao, Y.; Gou, J.; Hui, D.; Fu, Y.Q. Controlling Au electrode patterns for simultaneously monitoring electrical actuation and shape recovery in shape memory polymer. Compos. Part B Eng. 2015, 80, 37–42. [Google Scholar] [CrossRef]
- Garces, I.T.; Ayranci, C. Active control of 4D prints: Towards 4D printed reliable actuators and sensors. Sens. Actuat. A Phys. 2020, 301, 111717. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X. 4D printing reversible actuator with strain self-sensing function via structural design. Compos. Part B Eng. 2021, 211, 108644–108655. [Google Scholar] [CrossRef]
- Gall, K.; Mikulas, M.; Munshi, N.A.; Beavers, F.; Tupper, M. Carbon Fiber Reinforced Shape Memory Polymer Composites. J. Intell. Mater. Syst. Struct. 2000, 11, 877–886. [Google Scholar] [CrossRef]
- Shi, G.H.; Yang, Q.S.; Zhang, Q. Investigation of buckling behavior of carbon nanotube/shape memory polymer composite shell. In Proceedings of the Third International Conference on Smart Materials and Nanotechnology in Engineering, Shenzhen, China, 5–8 December 2011. [Google Scholar]
- Baghani, M.; Naghdabadi, R.; Arghavani, J.; Sohrabpour, S. A thermodynamically consistent 3D constitutive model for shape memory polymers. Int. J. Plast. 2012, 35, 13–30. [Google Scholar] [CrossRef]
- Nishikawa, M.; Wakatsuki, K.; Yoshimura, A.; Takeda, N. Effect of fiber arrangement on and shape recovery in thermally activated shape memory polymer-based composites. Compos. Part A Appl. Sci. Manuf. 2012, 43, 165–173. [Google Scholar] [CrossRef]
- Bergman, D.; Yang, B. A finite element model of shape memory polymer composite beams for space applications. Int. J. Numer. Meth. Eng. 2015, 103, 671–702. [Google Scholar] [CrossRef]
- Zhang, Z.; Long, Y.; Yang, Z.; Fu, K.; Li, Y. An investigation into printing pressure of 3D printed continuous carbon fiber reinforced composites. Compos. Part A Appl. Sci. Manuf. 2022, 162, 107162. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Finger No. | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Finger area (mm2) | 420 | 390 | 370 | 320 | 280 |
| Carbon fiber bundle length (mm) | 39.9 | 31.2 | 27.75 | 20.8 | 16.8 |
| Regional fiber volume content (%) | 0.95 | 0.8 | 0.75 | 0.65 | 0.6 |
| Print Parameters | Materials | |
|---|---|---|
| PLA | CCF/PLA | |
| Line width (mm) | 0.4 | as required |
| Nozzle diameter (mm) | 0.4 | 0.8 |
| Layer thickness (mm) | 0.2 | 0.2 |
| Print temperature (°C) | 220 | 220 |
| Print speed (mm/s) | 40 | 5 |
| Parameters | Materials | |
|---|---|---|
| CF | PLA | |
| Density (g/cm3) | 1.76 | 1.24 |
| Specific heat (J/(kg °C)) | 700 | 200 |
| Conductivity (W/(mm °C)) | 6000 | 250 |
| Joule heat fraction | 1 | - |
| Viscoelastic properties (WLF equation) | - | C1 = 15, C2 = 67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhang, Z.; Fu, K.; Li, Y. Four-Dimensionally Printed Continuous Carbon Fiber-Reinforced Shape Memory Polymer Composites with Diverse Deformation Based on an Inhomogeneous Temperature Field. Polymers 2023, 15, 3740. https://doi.org/10.3390/polym15183740
Wang H, Zhang Z, Fu K, Li Y. Four-Dimensionally Printed Continuous Carbon Fiber-Reinforced Shape Memory Polymer Composites with Diverse Deformation Based on an Inhomogeneous Temperature Field. Polymers. 2023; 15(18):3740. https://doi.org/10.3390/polym15183740
Chicago/Turabian StyleWang, Hongyan, Zhongsen Zhang, Kunkun Fu, and Yan Li. 2023. "Four-Dimensionally Printed Continuous Carbon Fiber-Reinforced Shape Memory Polymer Composites with Diverse Deformation Based on an Inhomogeneous Temperature Field" Polymers 15, no. 18: 3740. https://doi.org/10.3390/polym15183740
APA StyleWang, H., Zhang, Z., Fu, K., & Li, Y. (2023). Four-Dimensionally Printed Continuous Carbon Fiber-Reinforced Shape Memory Polymer Composites with Diverse Deformation Based on an Inhomogeneous Temperature Field. Polymers, 15(18), 3740. https://doi.org/10.3390/polym15183740