
Precision Regulation and Forecasting of Greenhouse Tomato Growth Conditions Using an Improved GA-BP Model


 ,
,
Abstract
1. Introduction
2. Materials and Methods
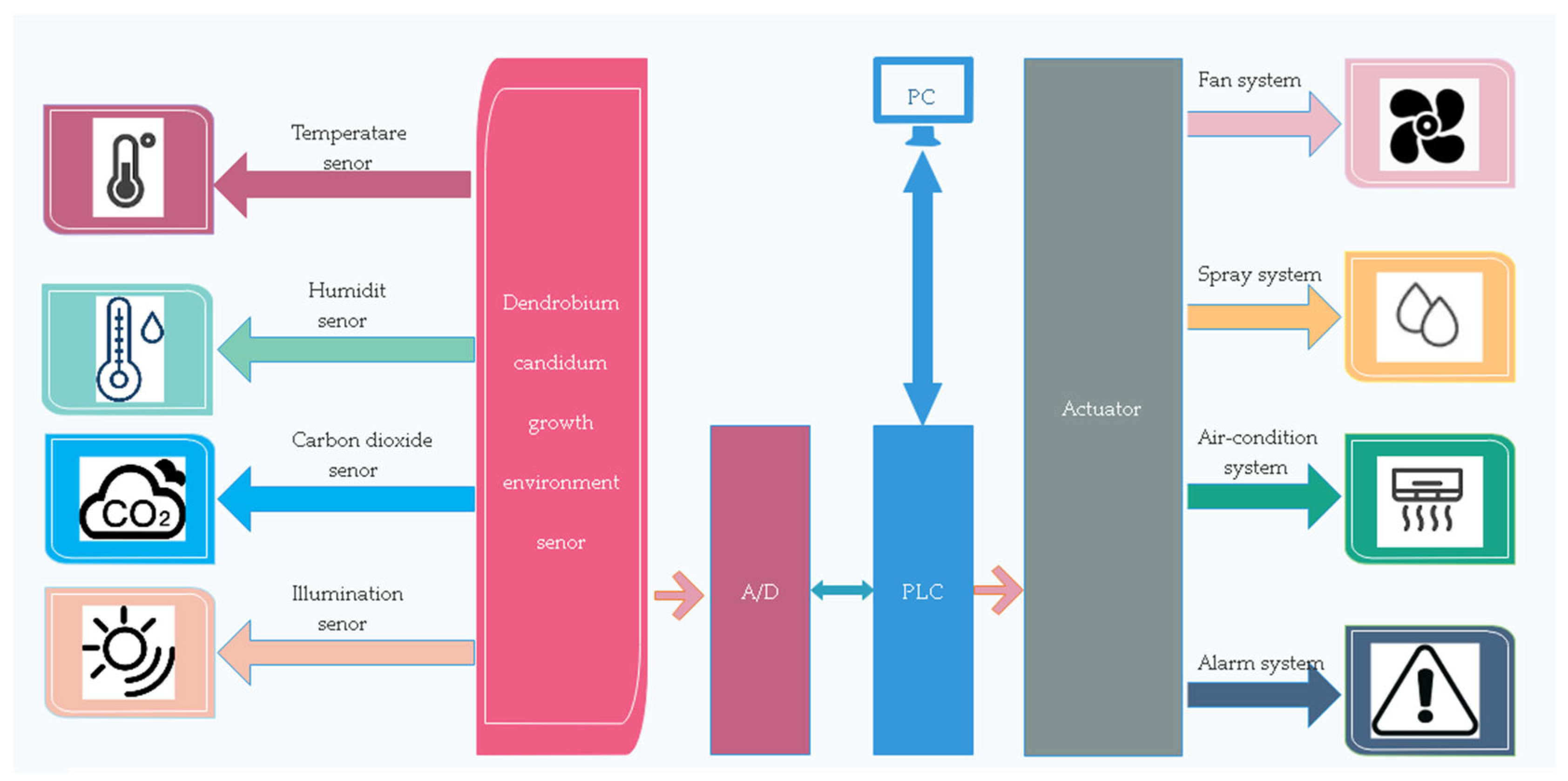
2.1. System Design
2.2. Parameter Control Strategy
2.3. Determination of the Best Parameters
2.4. Establish a BP Neural Network Prediction Model
3. Results
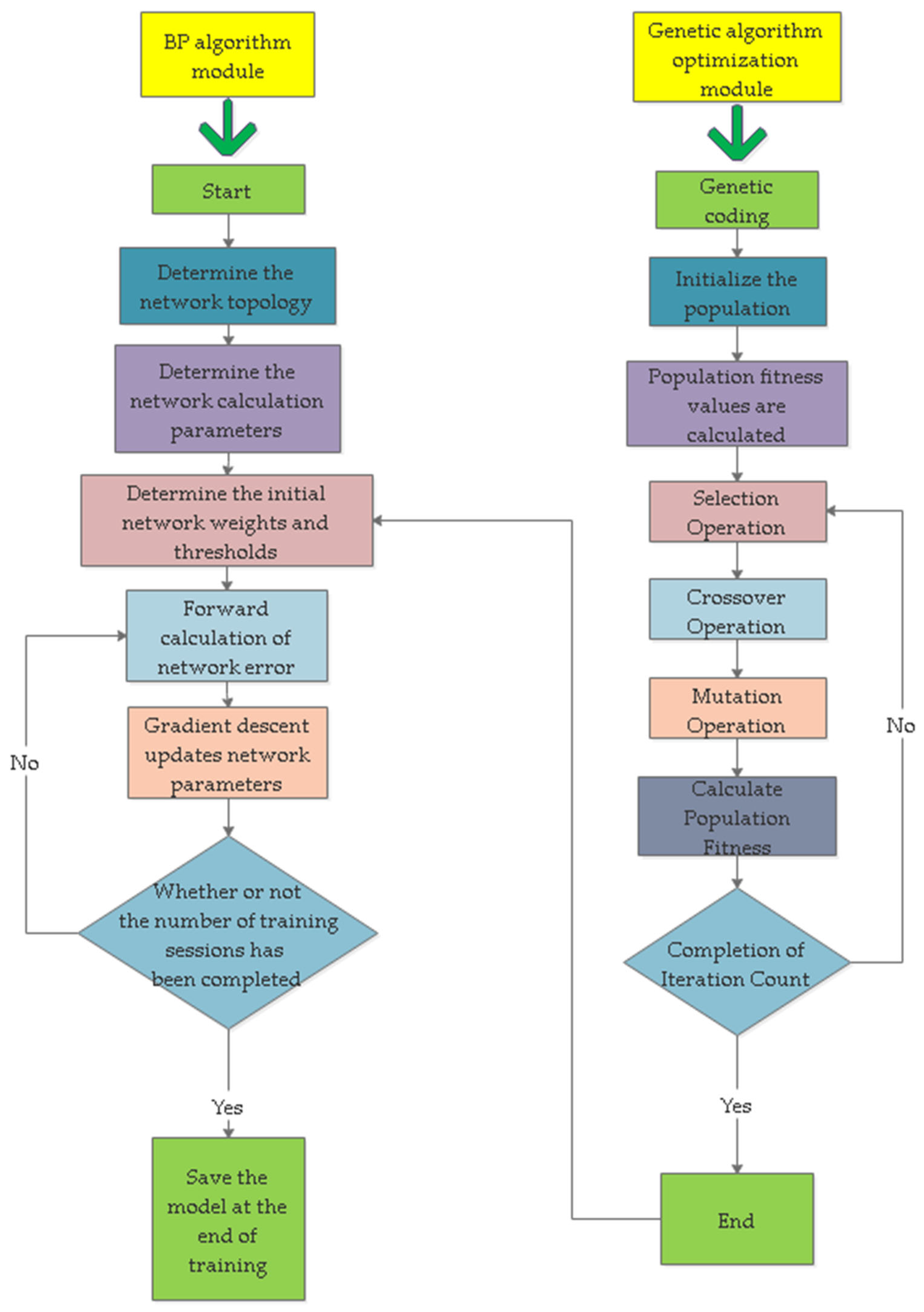
3.1. Improve the Neural Network with Genetic Algorithm
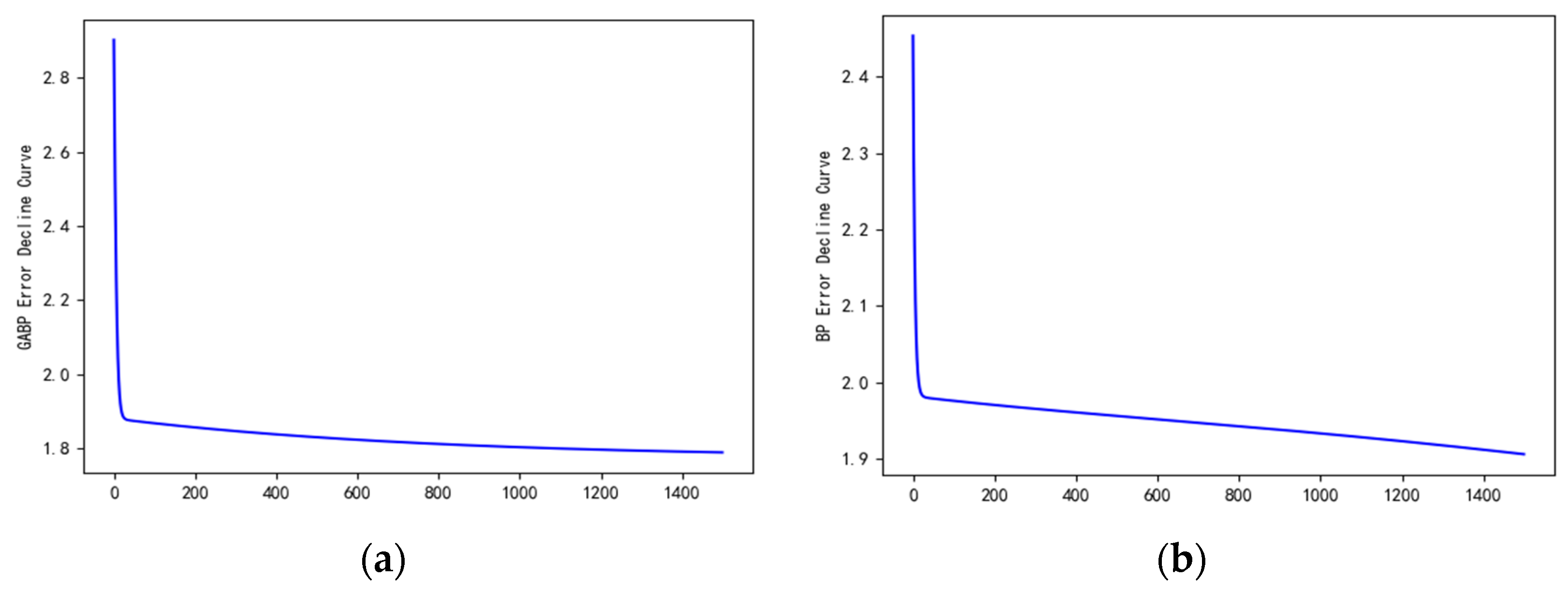
3.2. Comparison of Improved Algorithm and Traditional Algorithm
3.3. Analysis
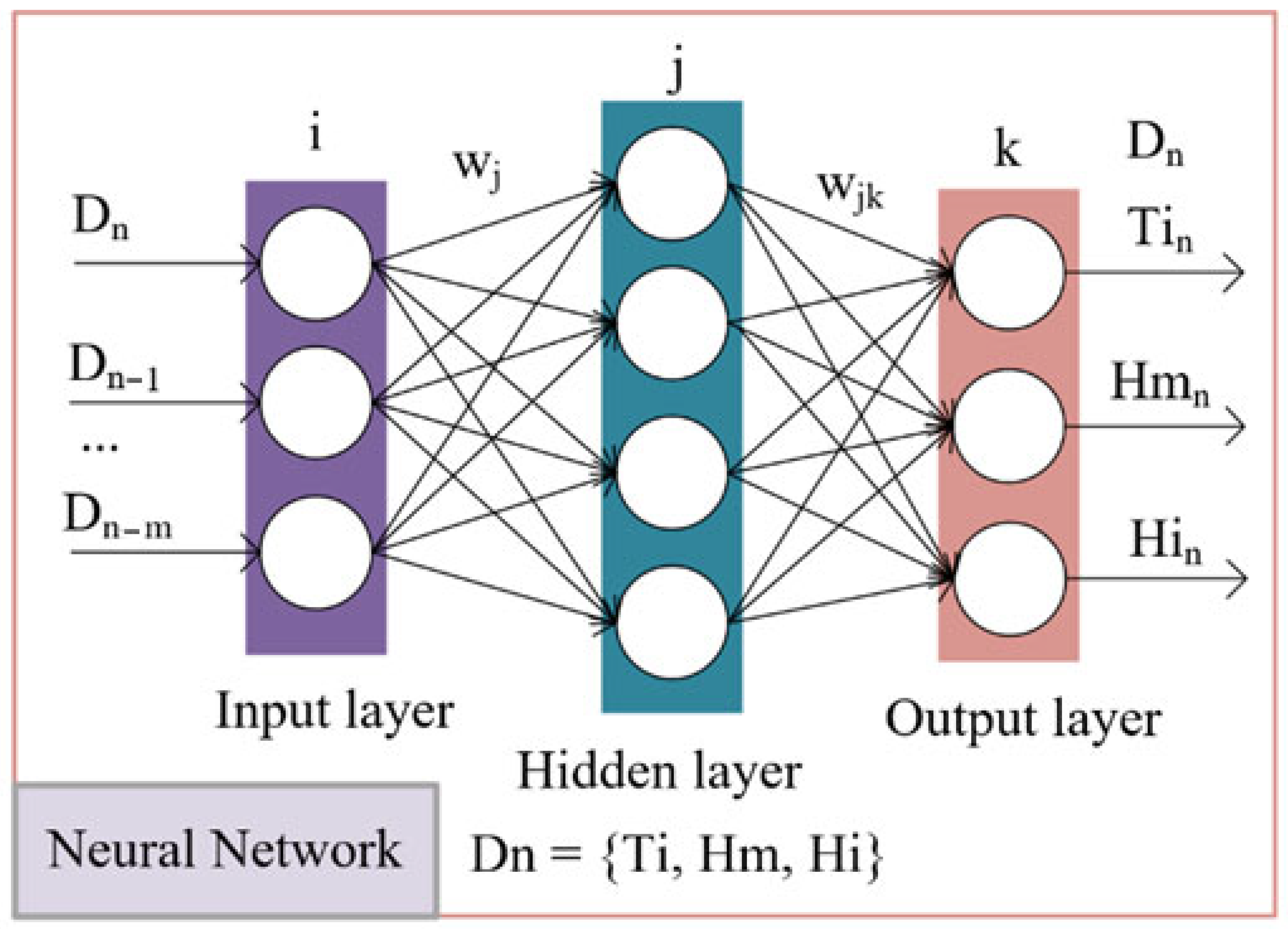
- Input Layer: There should be as many neurons as there are features relevant to predicting tomato growth. For instance, if soil temperature, humidity, light intensity, and CO2 concentration are used as features, the input layer should have four neurons;
- Hidden Layer: A crucial part of the BP network, the number of neurons (hidden neurons) in this layer should be determined based on the complexity of the problem, size, and dimensions of the training data. The number of neurons in the hidden layer is not fixed and should be optimized through experimentation to find the best network performance;
- Output Layer: The number of neurons in the output layer should correspond to the number of prediction targets. In the case of tomato growth prediction, if the goal is to predict a single growth indicator like size or weight, then the output layer may only need one neuron.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Henke, M.; Li, Y.; Sun, Z.; Li, W.; Liu, X.; Li, T. Estimating the Light Interception and Photosynthesis of Greenhouse-Cultivated Tomato Crops under Different Canopy Configurations. Agronomy 2024, 14, 249. [Google Scholar] [CrossRef]
- Fidan, H.; Ulusoy, D.; Albezirgan, H.N. Exploring Effective Strategies for ToBRFV Management in Tomato Production: Insights into Seed Transmission Dynamics and Innovative Control Approaches. Agriculture 2024, 14, 108. [Google Scholar] [CrossRef]
- Liu, H.; Shao, M.; Yang, L. Photosynthesis Characteristics of Tomato Plants and Its’ Responses to Microclimate in New Solar Greenhouse in North China. Horticulturae 2023, 9, 197. [Google Scholar] [CrossRef]
- Fu, H.; Guo, M.; Shan, X.; Zhang, X.; Sun, Z.; Liu, Y.; Li, T. 13 Cycles of Consecutive Tomato Monoculture Cropping Alter Soil Chemical Properties and Soil Fungal Community in Solar Greenhouse. Horticulturae 2023, 9, 505. [Google Scholar] [CrossRef]
- Peng, X.; Yu, X.; Luo, Y.; Chang, Y.; Lu, C.; Chen, X. Prediction Model of Greenhouse Tomato Yield Using Data Based on Different Soil Fertility Conditions. Agronomy 2023, 13, 1892. [Google Scholar] [CrossRef]
- Ge, J.; Yu, Z.; Gong, X.; Ping, Y.; Luo, J.; Li, Y. Evaluation of Irrigation Modes for Greenhouse Drip Irrigation Tomatoes Based on AquaCrop and DSSAT Models. Plants 2023, 12, 3863. [Google Scholar] [CrossRef] [PubMed]
- Appolloni, E.; Paucek, I.; Pennisi, G.; Manfrini, L.; Gabarrell, X.; Gianquinto, G.; Orsini, F. Winter Greenhouse Tomato Cultivation: Matching Leaf Pruning and Supplementary Lighting for Improved Yield and Precocity. Agronomy 2023, 13, 671. [Google Scholar] [CrossRef]
- Fan, Z.; Li, Y.; Jiang, L.; Wang, L.; Li, T.; Liu, X. Analysis of the Effect of Exhaust Configuration and Shape Parameters of Ventilation Windows on Microclimate in Round Arch Solar Greenhouse. Sustainability 2023, 15, 6432. [Google Scholar] [CrossRef]
- Han, X.; Sun, Y.; Chen, J.; Wang, Z.; Qi, H.; Liu, Y.; Liu, Y. Effects of CO2 Enrichment on Carbon Assimilation, Yield and Quality of Oriental Melon Cultivated in a Solar Greenhouse. Horticulturae 2023, 9, 561. [Google Scholar] [CrossRef]
- Ge, J.; Liu, H.; Gong, X.; Yu, Z.; Li, L.; Li, Y. Root Distribution of Tomato Cultivated in Greenhouse under Different Ventilation and Water Conditions. Plants 2023, 12, 1625. [Google Scholar] [CrossRef] [PubMed]
- Tawfik, M.A.; Oweda, K.M.; Abd El-Wahab, M.K.; Abd Allah, W.E. A New Mode of a Natural Convection Solar Greenhouse Dryer for Domestic Usage: Performance Assessment for Grape Drying. Agriculture 2023, 13, 1046. [Google Scholar] [CrossRef]
- Lei, H.; Lian, Y.; Du, J.; Pan, H.; Li, X.; Li, D.; Jin, C.; Xiao, Z.; Hou, Y. Dynamic Optimization of Greenhouse Tomato Irrigation Schedule Based on Water, Fertilizer and Air Coupled Production Function. Agronomy 2023, 13, 776. [Google Scholar] [CrossRef]
- Liu, H.; Lu, L.; Sun, D.; Liu, P.; Li, Y.; Li, T.; Liu, X. A Two-Factor Thermal Screen Control Strategy for Chinese Solar Greenhouses in High-Latitude Areas. Agronomy 2023, 13, 821. [Google Scholar] [CrossRef]
- An, S.; Yang, F.; Yang, Y.; Huang, Y.; Zhangzhong, L.; Wei, X.; Yu, J. Water Demand Pattern and Irrigation Decision-Making Support Model for Drip-Irrigated Tomato Crop in a Solar Greenhouse. Agronomy 2022, 12, 1668. [Google Scholar] [CrossRef]
- Yang, L.; Liu, H.; Tang, X.; Li, L. Tomato Evapotranspiration, Crop Coefficient and Irrigation Water Use Efficiency in the Winter Period in a Sunken Chinese Solar Greenhouse. Water 2022, 14, 2410. [Google Scholar] [CrossRef]
- Yang, L.; Liu, H.; Cohen, S.; Gao, Z. Microclimate and Plant Transpiration of Tomato (Solanum lycopersicum L.) in a Sunken Solar Greenhouse in North China. Agriculture 2022, 12, 260. [Google Scholar] [CrossRef]
- Shao, M.; Liu, H.; Yang, L. Estimating Tomato Transpiration Cultivated in a Sunken Solar Greenhouse with the Penman-Monteith, Shuttleworth-Wallace and Priestley-Taylor Models in the North China Plain. Agronomy 2022, 12, 2382. [Google Scholar] [CrossRef]
- Flores-Velázquez, J.; Rojano, F.; Aguilar-Rodríguez, C.E.; Villagran, E.; Villarreal-Guerrero, F. Greenhouse Thermal Effectiveness to Produce Tomatoes Assessed by a Temperature-Based Index. Agronomy 2022, 12, 1158. [Google Scholar] [CrossRef]
- Yeo, U.-H.; Lee, S.-Y.; Park, S.-J.; Kim, J.-G.; Choi, Y.-B.; Kim, R.-W.; Shin, J.H.; Lee, I.-B. Rooftop Greenhouse: (1) Design and Validation of a BES Model for a Plastic-Covered Greenhouse Considering the Tomato Crop Model and Natural Ventilation Characteristics. Agriculture 2022, 12, 903. [Google Scholar] [CrossRef]
- Si, C.; Qi, F.; Ding, X.; He, F.; Gao, Z.; Feng, Q.; Zheng, L. CFD Analysis of Solar Greenhouse Thermal and Humidity Environment Considering Soil–Crop–Back Wall Interactions. Energies 2023, 16, 2305. [Google Scholar] [CrossRef]
- Sharaf-Eldin, M.A.; Yaseen, Z.M.; Elmetwalli, A.H.; Elsayed, S.; Scholz, M.; Al-Khafaji, Z.; Omar, G.F. Modifying Walk-In Tunnels through Solar Energy, Fogging, and Evaporative Cooling to Mitigate Heat Stress on Tomato. Horticulturae 2023, 9, 77. [Google Scholar] [CrossRef]
- Ohashi, Y.; Murai, M.; Ishigami, Y.; Goto, E. Light-Intercepting Characteristics and Growth of Tomatoes Cultivated in a Greenhouse Using a Movable Bench System. Horticulturae 2022, 8, 60. [Google Scholar] [CrossRef]
- Moreno-Teruel, M.Á.; Molina-Aiz, F.D.; López-Martínez, A.; Marín-Membrive, P.; Peña-Fernández, A.; Valera-Martínez, D.L. The Influence of Different Cooling Systems on the Microclimate, Photosynthetic Activity and Yield of a Tomato Crops (Lycopersicum esculentum Mill.) in Mediterranean Greenhouses. Agronomy 2022, 12, 524. [Google Scholar] [CrossRef]
- Sun, L.; Li, B.; Yao, M.; Mao, L.; Zhao, M.; Niu, H.; Xu, Z.; Wang, T.; Wang, J. Simulation of Soil Water Movement and Root Uptake under Mulched Drip Irrigation of Greenhouse Tomatoes. Water 2023, 15, 1282. [Google Scholar] [CrossRef]
- Liang, B.; Zhao, S.; Li, Y.; Wang, P.; Liu, Z.; Zhang, J.; Ding, T. Study on the Natural Ventilation Characteristics of a Solar Greenhouse in a High-Altitude Area. Agronomy 2022, 12, 2387. [Google Scholar] [CrossRef]
- Appolloni, E.; Paucek, I.; Pennisi, G.; Stringari, G.; Gabarrell Durany, X.; Orsini, F.; Gianquinto, G. Supplemental LED Lighting Improves Fruit Growth and Yield of Tomato Grown under the Sub-Optimal Lighting Condition of a Building Integrated Rooftop Greenhouse (i-RTG). Horticulturae 2022, 8, 771. [Google Scholar] [CrossRef]
- Fang, S.-L.; Kuo, Y.-H.; Kang, L.; Chen, C.-C.; Hsieh, C.-Y.; Yao, M.-H.; Kuo, B.-J. Using Sigmoid Growth Models to Simulate Greenhouse Tomato Growth and Development. Horticulturae 2022, 8, 1021. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Y.; Liu, J.; Wang, J.; Zhang, Z.; Xiao, N. Changes of Soil Water and Heat Transport and Yield of Tomato (Solanum lycopersicum) in Greenhouses with Micro-Sprinkler Irrigation under Plastic Film. Agronomy 2022, 12, 664. [Google Scholar] [CrossRef]
- Jemai, N.; Soussi, M.; Chaibi, M.T. Opportunities for Implementing Closed Greenhouse Systems in Arid Climate Conditions. Horticulturae 2022, 8, 1102. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, H.; Wang, C.; Zong, Z.; Wang, H.; Zhao, X.; Wang, S.; Li, Y. Testing and Analysis on the Spatial and Temporal Distribution of Light Intensity and CO2 Concentration in Solar Greenhouse. Sustainability 2023, 15, 7001. [Google Scholar] [CrossRef]
- Liu, A.; Xu, D.; Henke, M.; Zhang, Y.; Li, Y.; Liu, X.; Li, T. Determination of the Optimal Orientation of Chinese Solar Greenhouses Using 3D Light Environment Simulations. Remote Sens. 2022, 14, 912. [Google Scholar] [CrossRef]
- Grimberg, R.; Teitel, M.; Ozer, S.; Levi, A.; Levy, A. Estimation of Greenhouse Tomato Foliage Temperature Using DNN and ML Models. Agriculture 2022, 12, 1034. [Google Scholar] [CrossRef]
- Su, F.; Zhao, Y.; Wang, G.; Liu, P.; Yan, Y.; Zu, L. Tomato Maturity Classification Based on SE-YOLOv3-MobileNetV1 Network under Nature Greenhouse Environment. Agronomy 2022, 12, 1638. [Google Scholar] [CrossRef]
- Li, H.; Li, A.; Hou, Y.; Zhang, C.; Guo, J.; Li, J.; Ma, Y.; Wang, T.; Yin, Y. Analysis of Heat and Humidity in Single-Slope Greenhouses with Natural Ventilation. Buildings 2023, 13, 606. [Google Scholar] [CrossRef]
- Hong, M.; Zhang, Z.; Fu, Q.; Liu, Y. Water Requirement of Solar Greenhouse Tomatoes with Drip Irrigation under Mulch in the Southwest of the Taklimakan Desert. Water 2022, 14, 3050. [Google Scholar] [CrossRef]
- Qi, M.; Gao, H.; Wang, T.; Du, B.; Li, H.; Zhong, W.; Tang, Y. Method for Segmentation of Bean Crop and Weeds Based on Improved UperNet. IEEE Access 2023, 14, 912. [Google Scholar] [CrossRef]
- Wang, J.; Shi, P.; Jiang, P.; Hu, J.; Qu, S.; Chen, X.; Chen, Y.; Dai, Y.; Xiao, Z. Application of BP Neural Network Algorithm in Traditional Hydrological Model for Flood Forecasting. Water 2017, 9, 48. [Google Scholar] [CrossRef]
- Kumar, M.G.V.; N, V.; Čepová, L.; Raja, M.A.M.; Balaram, A.; Elangovan, M. Evaluation of the Quality of Practical Teaching of Agricultural Higher Vocational Courses Based on BP Neural Network. Appl. Sci. 2023, 13, 1180. [Google Scholar] [CrossRef]
- Yu, F.; Zhao, Y.; Lin, Z.; Miao, Y.; Zhao, F.; Xie, Y. Prediction of Mechanical Properties and Optimization of Friction Stir Welded 2195 Aluminum Alloy Based on BP Neural Network. Metals 2023, 13, 267. [Google Scholar] [CrossRef]
- Du, Z.; Yao, H.; Fu, Y.; Cao, Z.; Liang, H.; Ren, J. Network Situation Assessment Method Based on Improved BP Neural Network. Electronics 2023, 12, 483. [Google Scholar] [CrossRef]
- Yan, J.; Xu, Z.; Yu, Y.; Xu, H.; Gao, K. Application of a Hybrid Optimized BP Network Model to Estimate Water Quality Parameters of Beihai Lake in Beijing. Appl. Sci. 2019, 9, 1863. [Google Scholar] [CrossRef]
- Lai, X.; Tu, Y.; Yan, B.; Wu, L.; Liu, X. A Method for Predicting Ground Pressure in Meihuajing Coal Mine Based on Improved BP Neural Network by Immune Algorithm-Particle Swarm Optimization. Processes 2024, 12, 147. [Google Scholar] [CrossRef]
- Musiałek, F.; Szabra, D.; Wojtas, J. Time-Efficient SNR Optimization of WMS-Based Gas Sensor Using a Genetic Algorithm. Sensors 2024, 24, 1842. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
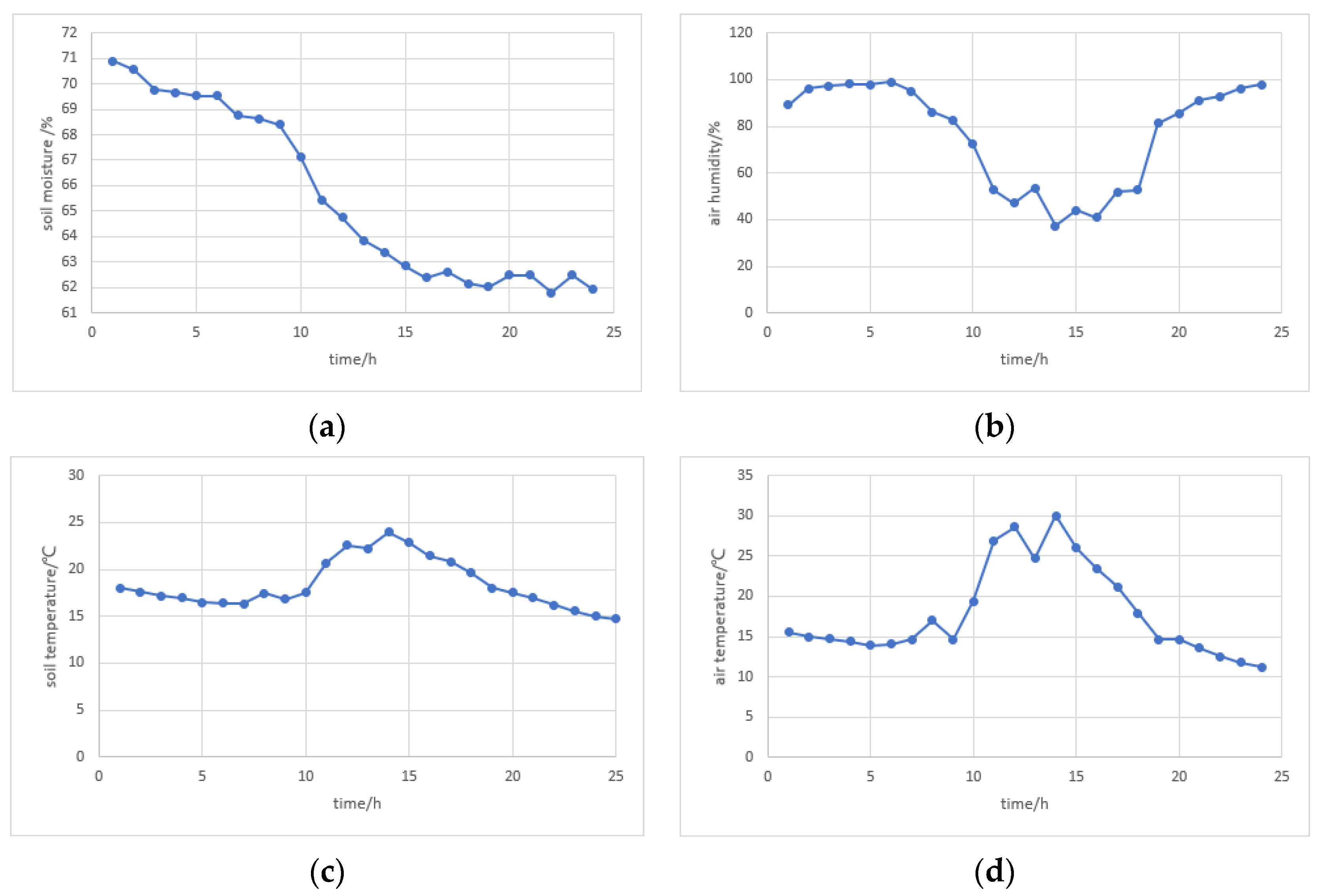
| Time | Soil Moisture (%) | Air Humidity (%) | Soil Temperature (°C) | Air Temperature (°C) |
|---|---|---|---|---|
| 2:00 | 71 | 89 | 18 | 12.7 |
| 4:00 | 70. 6 | 96 | 16.9 | 11.2 |
| 6:00 | 69.5 | 95.1 | 16.4 | 12.4 |
| 8:00 | 68.6 | 86.1 | 17.4 | 17.2 |
| 10:00 | 67.1 | 72.2 | 17.5 | 25.3 |
| 12:00 | 65.4 | 47.2 | 22.5 | 26.5 |
| 14:00 | 63.4 | 37.4 | 23.9 | 35.4 |
| 16:00 | 62.3 | 40.8 | 21.4 | 26.6 |
| 18:00 | 62.1 | 52.8 | 19.6 | 13 |
| 20:00 | 62.5 | 85.5 | 17.5 | 11.5 |
| 22:00 | 61.8 | 92.8 | 16.2 | 11.3 |
| 24:00 | 62.1 | 97.7 | 14.9 | 10.9 |
| Convergence Mode | Target Error | Convergence Step Size | Convergence Time | Result |
|---|---|---|---|---|
| Traditional BP Neural Network Learning Algorithm | 0.04% | 0.6 | 4.5 h | Larger step size, slower convergence speed |
| Traditional Genetic Algorithm | 0.04% | 0.4 | Infinite | |
| Improved GA-Based BP Neural Network Learning Algorithm | 0.04% | 0.2 | 3.4 h | Can converge rapidly |
| Developmental Stage | Fruit Horizontal Diameter (mm) | Longitudinal Diameter of Fruit (mm) | Fruit Fresh Weight (g) | Dry Weight (g) | Moisture Content (g) |
|---|---|---|---|---|---|
| 15DAA | 18.61 | 24.33 | 4.93 | 0.74 | 4.19 |
| 15DAA | 22.25 | 23.89 | 6.43 | 0.93 | 5.50 |
| 15DAA | 22.09 | 32.5 | 9.98 | 1.39 | 8.59 |
| 15DAA | 23.31 | 38.16 | 9.47 | 1.00 | 8.47 |
| 15DAA | 20.22 | 28.44 | 6.65 | 0.92 | 5.73 |
| 15DAA | 22.56 | 36.81 | 10.33 | 1.41 | 8.92 |
| 15DAA | 18.12 | 23.65 | 4.16 | 0.30 | 3.86 |
| 15DAA | 19.06 | 27.75 | 5.13 | 0.51 | 4.62 |
| 15DAA | 21.03 | 24.98 | 5.17 | 0.54 | 4.63 |
| 15DAA | 16.23 | 23.51 | 2.99 | 0.30 | 2.69 |
| 15DAA | 25.59 | 32.05 | 11.00 | 1.13 | 9.87 |
| 35DAA | 43.62 | 60.43 | 49.74 | 4.02 | 45.72 |
| 35DAA | 31.57 | 43.59 | 22.31 | 2.32 | 19.99 |
| 35DAA | 48.73 | 55.52 | 65.82 | 5.57 | 60.25 |
| 35DAA | 29.00 | 29.49 | 17.59 | 1.53 | 16.06 |
| 35DAA | 43.92 | 61.64 | 61.63 | 4.44 | 57.19 |
| 35DAA | 38.60 | 51.85 | 38.33 | 3.57 | 34.76 |
| 35DAA | 33.99 | 56.78 | 38.92 | 4.08 | 34.84 |
| 35DAA | 40.45 | 65.35 | 56.68 | 5.20 | 51.48 |
| 35DAA | 42.09 | 57.41 | 42.21 | 3.18 | 39.03 |
| 35DAA | 29.54 | 52.81 | 26.83 | 2.53 | 24.30 |
| 35DAA | 39.17 | 61.73 | 42.20 | 3.58 | 38.62 |
| 35DAA | 41.31 | 61.22 | 47.39 | 4.40 | 42.99 |
| 35DAA | 33.00 | 57.33 | 34.50 | 3.31 | 31.19 |
| 35DAA | 30.92 | 52.53 | 26.51 | 2.45 | 24.06 |
| 35DAA | 41.82 | 60.73 | 55.85 | 4.07 | 51.78 |
| 35DAA | 34.35 | 57.12 | 34.13 | 2.98 | 31.15 |
| 35DAA | 36.90 | 58.07 | 40.45 | 2.69 | 37.76 |
| 35DAA | 40.43 | 66.09 | 59.68 | 4.88 | 54.80 |
| 35DAA | 28.35 | 47.72 | 19.38 | 1.72 | 17.66 |
| 35DAA | 36.20 | 57.82 | 37.19 | 2.94 | 34.25 |
| 35DAA | 34.75 | 53.78 | 34.56 | 3.25 | 31.31 |
| 35DAA | 41.66 | 60.62 | 45.11 | 4.08 | 41.03 |
| 65DAA | 49.00 | 58.51 | 73.81 | 6.17 | 67.64 |
| 65DAA | 47.18 | 62.51 | 77.07 | 4.61 | 72.46 |
| 65DAA | 53.82 | 71.35 | 103.28 | 7.81 | 95.47 |
| 65DAA | 50.03 | 76.48 | 93.25 | 7.34 | 85.91 |
| 65DAA | 40.99 | 66.69 | 60.08 | 4.77 | 55.31 |
| 65DAA | 45.35 | 67.14 | 74.10 | 5.81 | 68.29 |
| 65DAA | 39.22 | 68.2 | 59.38 | 4.69 | 54.69 |
| 65DAA | 42.11 | 59.32 | 54.46 | 3.52 | 50.94 |
| 65DAA | 46.87 | 64.58 | 91.27 | 5.77 | 85.50 |
| 65DAA | 39.87 | 60.32 | 94.73 | 4.12 | 90.61 |
| 65DAA | 48.00 | 70.27 | 85.86 | 6.43 | 79.43 |
| 65DAA | 43.38 | 70.92 | 78.41 | 6.22 | 72.19 |
| 65DAA | 49.23 | 60.43 | 76.70 | 6.26 | 70.44 |
| 65DAA | 55.30 | 74.59 | 120.40 | 7.94 | 110.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Zhong, W.; Liu, Z.; Du, B.; Li, M.; Huang, M.; Yu, H.; Chen, B.; Tang, Y. Precision Regulation and Forecasting of Greenhouse Tomato Growth Conditions Using an Improved GA-BP Model. Sustainability 2024, 16, 4161. https://doi.org/10.3390/su16104161
Zhang W, Zhong W, Liu Z, Du B, Li M, Huang M, Yu H, Chen B, Tang Y. Precision Regulation and Forecasting of Greenhouse Tomato Growth Conditions Using an Improved GA-BP Model. Sustainability. 2024; 16(10):4161. https://doi.org/10.3390/su16104161
Chicago/Turabian StyleZhang, Wei, Wenyu Zhong, Zhidong Liu, Baoxia Du, Mingliang Li, Meng Huang, Helong Yu, Bowei Chen, and You Tang. 2024. "Precision Regulation and Forecasting of Greenhouse Tomato Growth Conditions Using an Improved GA-BP Model" Sustainability 16, no. 10: 4161. https://doi.org/10.3390/su16104161
APA StyleZhang, W., Zhong, W., Liu, Z., Du, B., Li, M., Huang, M., Yu, H., Chen, B., & Tang, Y. (2024). Precision Regulation and Forecasting of Greenhouse Tomato Growth Conditions Using an Improved GA-BP Model. Sustainability, 16(10), 4161. https://doi.org/10.3390/su16104161