
Eco-Friendly Smart Car Parking Management System with Enhanced Sustainability
by
 , , , and
, , , and
Nazmus Sakib
1 ,
,
A. S. M. Bakibillah
2,*,
Susilawati Susilawati
3,
Md Abdus Samad Kamal
1,* and
Kou Yamada
1 1
Graduate School of Science and Technology, Gunma University, Kiryu 376-8515, Japan
2
Department of Systems and Control Engineering, Tokyo Institute of Technology, Tokyo 152-8552, Japan
3
School of Engineering, Monash University, Bandar Sunway, Subang Jaya 47500, Malaysia
*
Authors to whom correspondence should be addressed.
Sustainability 2024, 16(10), 4145; https://doi.org/10.3390/su16104145
Submission received: 6 April 2024
/
Revised: 8 May 2024
/
Accepted: 13 May 2024
/
Published: 15 May 2024
(This article belongs to the Special Issue New Trends and Technologies for Safe, Green, Low-Carbon and Sustainable Traffic Systems)
Abstract
:Efficient car parking management systems that minimize environmental impacts while maximizing user comfort are highly demanding for a future sustainable society. Using electric or gasoline vehicle-type information, emerging computation and communication technologies open the opportunity to provide practical solutions to achieve such goals. This paper proposes an eco-friendly smart parking management system that optimally allocates the incoming vehicles to reduce overall emissions in closed parking facilities while providing comfort incentives to the users of electric vehicles (EVs). Specifically, upon arrival of a car, the most suitable parking spot is determined by minimizing an adaptive objective function that indirectly reflects anticipatory operation for the overall performance maximization of the parking facility using electric or gasoline vehicle-type information. The adaptive objective function includes a trade-off factor that tunes driving and walking distances, relating emissions and comfort to treat incoming vehicles appropriately. The proposed system is simulated for managing a model car parking facility in a shopping complex in Japan, and the aspects related to fuel consumption, CO2 emissions, and user comfort are evaluated and benchmarked with other standard parking management systems. The proposed system reduces CO2 emissions and fuel consumption and improves parking efficiency compared to the current parking management systems, while also prioritizing user comfort.
1. Introduction
The emergence of smart cities is a current issue that makes use of cutting-edge technologies to improve the energy, transportation, health, and educational systems of society [1]. However, with the increase in urban traffic in recent decades, the management of transportation-related concerns, such as traffic congestion on road networks and parking spaces and environmental pollution, has become increasingly challenging for the development of smart cities [2,3]. Specifically, finding unoccupied parking spots is a common issue in most urban areas due to the large number of vehicles trying to reach persistently congested regions, which further increases traffic congestion, fuel costs, and greenhouse gas (GHG) emissions [4]. Additionally, finding a parking spot in an uncontrolled parking lot adds extra driving distance, walking distance, time waste, and user discomfort. Therefore, the parking management system is a continuing strategic issue to be worked on from a research standpoint, taking into account social and economic concerns to create a sustainable (or eco-friendly) society [5].
Intelligent Transportation Systems (ITS) could be a promising solution for enhancing the parking management system to resolve such parking issues [6]. In particular, intelligent parking systems, the development of inter-vehicle communication systems, and sensing technologies can collect real-time data from vehicles to determine the status of available parking lots [7]. Furthermore, by implementing an intelligent parking system, parking lot owners and users can experience a significant boost in parking efficiency and convenience, ultimately leading to a smoother and hassle-free parking experience. Currently, two types of parking systems are used in parking management: self-reservation [8,9,10] and allocation [11,12,13]. While both approaches aim to improve the overall management of parking spaces, the self-reservation system allows users to reserve a parking space in advance. On the other hand, the allocation system assigns parking spaces based on predefined criteria.
The work on self-reservation parking systems has become more complex due to the challenge of ensuring a real-time parking system. In the literature, several works focused on finding best-suited parking spaces by parking reservations with real-time data [14,15,16] and letting drivers choose to park themselves in the available parking spaces. However, a driver usually chooses the most convenient parking point without considering its utility or the needs of others from a global perspective. In [17], a parking management system based on the Internet of Things (IoT) is suggested to assist in identifying proper parking spaces through a mobile application. The system utilizes image processing techniques to detect vehicle registration plates and provides automatic gate control and other convenient facilities. In [18], a sensing platform with a mobile application was proposed to ensure a real-time interaction between drivers and the parking infrastructure to minimize drivers’ search time. Moreover, the first-come-first-reservation is one of the methods for the reservation-based parking lot, which is not legitimate for those users who need better or emergency service [19]. Furthermore, the self-reservation parking systems may increase GHG emissions due to extra driving and other circumstances.
On the other hand, some methods have been suggested for allocating the best parking spot by the parking authority for the approaching car [20,21,22]. Most existing works on parking allocation systems have not given enough consideration to the environmental impact and user comfort that could arise from the parking system. In [23], a cooperative approach is proposed for parking allocation where space or information sharing is a primary concern. Some works proposed dynamic allocation systems to reduce overall city congestion by the equal distribution of parking spaces [24,25]. Some other studies focused on the driver’s behavior and predicting previous parking records for parking allocation [26,27]. In [28], a parking allocation system was proposed that prioritized equitable allocation of parking spaces based on the overall number of people in each space to ensure smooth traffic flow. However, these parking systems primarily investigated where parking allocation has a better advantage for users based on their data. In summary, no state-of-the-art parking allocation systems in the literature addressed emission reduction while prioritizing user comfort by making optimal allocations based on real-time parking, car, and user states under the given parking capacity and demands.
For sustainable development in smart city transportation, it is essential to implement eco-friendly measures that reduce the adverse environmental effects of human activity [29]. With the increasing concern for the environment and the rising cost of gasoline, electric vehicles or EVs (including hybrid EVs, for simplicity) [30] have become an attractive option for vehicle users and are prevalent in many countries worldwide. The road transportation sector contributes to 16% of global emissions, highlighting the importance of transitioning to EVs to mitigate environmental emissions [31]. Due to the increasing popularity of EVs, it is possible to achieve net zero CO2 emissions in the transportation sector by 2050 [32]. Some metropolitan cities in various countries have enacted ordinances prohibiting diesel-powered commercial vehicles from operating on the streets unless they meet a specific limit on emissions of carcinogenic particles. However, from the road-traffic management viewpoint, such zero-emission vehicles are not receiving much attention despite their potential to improve overall environmental impacts [33]. Specifically, all types of EVs can maintain almost zero emissions in parking lot areas during low-speed driving. An optimal parking allocation system, properly allocating EVs and other vehicles in a parking lot, can reduce overall emissions and fuel expenses.
As a pioneering approach, this paper presents a novel allocation technique that optimizes total emissions in a parking lot while maintaining individual user comforts by incorporating vehicle emission classification and users’ information into an optimal allocation system. Such a novel vision of parking allocation is expected for the future technology-driven, innovative, and dynamic society. In a successive approach, upon receiving the request from each upcoming vehicle, an optimization problem is solved to allocate the appropriate parking point. Specifically, the electric or gasoline vehicle-type (henceforth regarded as emission-classified vehicle) information, i.e., whether it produces emissions in low-speed driving in the parking lot, and the priority and number of users are used to tune an adaptive objective function that indirectly reflects anticipatory operation for overall performance maximization of the parking facilities. Precisely, as the driving distance corresponds to the amount of CO2 emissions and walking distance is coupled to user comfort, their weightage is tuned in the objective function based on the emission-classified vehicle in such a way that in a whole day operation, the overall driving distance of all vehicles and walking distance of all passengers are minimized, despite their contradictory aspects. The proposed eco-friendly smart parking management system is simulated for managing a model car parking facility of a shopping complex in Japan, and various performance aspects, including the CO2 emission, fuel consumption, and factors related to user comfort, are compared to other parking allocation systems. The proposed system can be used for any closed parking lot of considerably large size (e.g., hundreds of cars), usually found in shopping complexes, hospitals, or public service buildings.
The paper is organized as follows: Section 2 describes problem formulation and the proposed eco-friendly optimal parking allocation system. Section 3 presents key simulation results and analysis. Section 4 gives the discussion, and finally, Section 5 concludes the paper with future research directions.
2. Parking Management System
2.1. Parking Allocation Problem
A car parking management system includes a decision system interaction mechanism with incoming vehicles and interfacing with a suitable sensor network for monitoring individual parking point occupancy and relevant information. A car is assumed to request a parking point, providing relevant information upon arrival, and the management system determines an available spot suitably based on the decision algorithm or objectives. We further assume that the driver follows the standard path within the parking facilities and smoothly places the car at the specified point, i.e., no vehicle places itself at a point different than the specified one. Precise sensing, communicating, and computing mechanisms are beyond the scope of this study, as the main focus is only to develop optimal parking allocation decision mechanisms compatible with any such infrastructure. This paper assumes that some parking spots near the walking entrance are reserved for wheelchair users (or users with special priority).
In this study, We formally represent a model of the parking allocation problem using mathematical notations and equations to formulate an optimal allocation system. We assume is the set of all parking points. For simplicity, we denote the set of all parking spots as , i.e., each spot has an identification number. The occupancy of any parking point is denoted by , where indicates it is unavailable or being used by a car and vice versa. For any parking point p, the minimum required driving distance from the entry to the exit is given by
where and are the respective distances to and from p. After parking the car at p, the user has to walk to the nearest entrance of the establishment by moving a distance . Therefore, the total walking distances for parking at p is given as
The cars arriving are denoted by their sequence number , with the arrival time of car n being . Each car communicates its relevant data to the parking management system and requests a parking point. The car information includes its model , its number of passengers , and their type . If any of the passengers in car n requires a wheelchair or priority parking point, then . Although there are significant variations in car models, we categorize them into three major groups and consider their types as EVs (electric vehicles), HEVs (hybrid electric vehicles), and GVs (gasoline vehicles) since they can be classified directly by their emissions in the parking facility. Upon the arrival of a car n at time t, the task of the parking allocation system is to select a suitable parking point subject to . Figure 1 demonstrates the operating process of the proposed eco-friendly optimal parking allocation system, where information from the vehicle is processed to determine the appropriate parking point for the vehicle through a tuned optimization process.
Typical Parking Allocation Schemes
First, we study some typical parking allocation schemes to illustrate better the underlying concepts and comparative notions of an eco-friendly optimal parking allocation system proposed in this paper. Usually, individuals desire to choose the parking point with the least walking distance (comfort maximization), whereas environmentalists expect to restrict the driving distance for lower emissions. Considering these contradictory aspects, we describe three possible baseline methods first.
- (i)
- The traditional greedy method involves allocating parking spots near the walking entrance of the establishment (building) to minimize the overall walking distance for users (i.e., maximize user comfort).
- (ii)
- The uncontrolled or random selection method involves allocating parking spots randomly when a user arrives and requests it. An uncontrolled or random allocation system may prevent users from conflicting with each other.
- (iii)
- The objective-balanced (simply balanced method) involves allocating parking spots considering both walking and driving costs in a balanced or equal way.
The above (i) traditional and (iii) balanced methods fall in the optimal parking selection systems category based on some objective functions. In a straightforward approach, we define a weighted composite cost incorporating the walking and driving distances required for using a parking point p for car n at time t as
where is a trade-off factor to consider the conflicting objectives, i.e., when , each term is equally emphasized. Since ranges and variations of driving and walking distances of all parking points are not similar, instead of actual distances, normalized distances are used in (3). Specifically, they are normalized to have a maximum value of one, i.e., varying from 0 to 1, as
where is the maximum possible driving distance and is the maximum possible walking distance.
In the case of the traditional (a greedy selection) method, the driving distance in (3) is ignored with , and a parking point p for is selected for car n arrived at t as
Note that the uncontrolled or random method is still better than the traditional greedy method, since in the traditional method, multiple drivers may rush to the best parking point, eventually causing some of them extra costs.
On the other hand, for an objective-balanced method, both driving and walking distances in (3) are considered with a suitable weight , and a parking point p for is selected for car n arrived at t as
where is a positive constant. Considering the objective of minimizing total emissions in a day and the average walking distance of all users, the above typical methods have obvious limitations.
The base cost function defined in (3) has some limitations in that any vehicle type and number of users per vehicle are treated similarly. Specifically, the term relating to the environmental impact due to vehicle emission should vary based on vehicle type, as the EV does not produce direct emissions. At the same time, the comfort of all users per car should be considered instead of counting the walking distance of only one user per car. These aspects are considered in the proposed scheme described next.
2.2. Eco-Friendly Parking Allocation System
Here, we develop an eco-friendly parking allocation system to minimize CO2 emissions in the parking facility for environmental sustainability while retaining the overall user comfort by enhancing the optimization problem further. Specifically, we consider that EVs or HEVs do not produce direct emissions while driving at low speeds, and GVs emit significant emissions in a closed parking space. Such information is suitably quantified in the objective function with appropriate tuning based on the type of the arrival car. In the proposed system, we consider a convex objective function concerning the decision of a discrete parking location. The optimal problem can be solved using any exhaustive search algorithm with time complexity . Therefore, for a parking lot with a capacity of a few hundred to a thousand cars, the allocation problem can be solved in a fraction of a second.
With modifications to (3), we introduce adaptive weighted costs incorporating the walking and driving distances required for using a parking spot p for car n arrived at time t, considering the influences of car types and number of users, as
where is a constant or a factor to consider the additive cost for extra users in the car, is the number of users, and with constants the adaptive trade-off factor of car type is tuned as
Here, and are chosen in a way that partially maps the driving distance to the emission produced in the parking facility. Specifically, is chosen to be smaller than as the EVs (or HEVs) do not produce direct emissions in low-speed drives. The first term in (6) partly includes costs for the required time and CO2 emission by the car n for traveling the distance, reflecting the car emissions attribute. The second term in (6) is the balancing cost of discomfort due to the walking distance from the parking spot. The third term is introduced for cars with more than one user to consider extra costs for their walking discomforts.
Based on the above considerations, in the proposed eco-friendly allocation scheme, a parking point p is selected for car n arrived at t as
In this parking allocation scheme for successively arriving cars of different types and varying numbers of users, the instant (non-predictive) status-based optimization is expected to provide an optimal solution that reflects the overall cost function minimization for a day-long operation with proper parameter tuning.
3. Simulation Results
3.1. Parking Lot Simulation Model
To better evaluate the proposed eco-friendly parking allocation system, this study investigates an existing shopping complex parking lot model in Japan. A simulation model of the study parking lot is designed in MATLAB R2022b, as shown in Figure 2, and the performance of the proposed eco-friendly optimal parking allocation system is evaluated. The parking lot is about 150 m long and 70 m wide, offering 181 parking spots. Each parking spot has a designated path to drive to it. There is one entry and exit for cars in the parking lot and two entrances for users to enter the shopping complex. It is observed that most cars prefer to park near the main walking entrance of the complex, which often causes conflicts with other drivers and sometimes increases the driving distance, increasing CO2 emissions. On the other hand, a car park near the parking entrance increases the walking distance but reduces emissions. To balance these conflicting aspects, an optimal parking allocation is necessary for approaching vehicles (e.g., GVs, EVs, (or HEVs)) to provide a user-efficient solution with lower emissions, considering the occupancy trends in the parking lot.
The parking management system is assumed to have a static database containing relevant information, such as the required driving distance (from entry to exit) and walking distance for each parking spot in the lot. In real-time, another dynamic database is maintained to list the parking status (i.e., empty or occupied, priority spots, etc.) and car types with the number of users. When a car arrives, the system must successfully organize the available parking spaces and assign one spot to each car based on the information on emission-classified vehicles. It is presumed that the car drives onto the designated parking spot and parks properly on time according to the instructions.
3.2. Simulation Parameter Settings
According to a recent report [34], about 40% of cars sold in Japan are EVs (or HEVs). In the simulation, we also consider about 40% EVs (or HEVs) selected randomly while generating the incoming vehicles in the parking lot. We conducted thorough observations of parking flow and occupancy at different hours of the day and surveyed a sample of users to analyze their parking habits. Based on this information, we created a typical hourly demand distribution over a day to generate car flow data independently to feed the car parking system. Specifically, in the simulation, about 2000 incoming cars in the parking lot from 7 a.m. to 11 p.m. are typically set for five days a week, and their arrival patterns are generated using a specified distribution. The resulting hourly arrival patterns of cars with (emission-classified) car types in a single weekday are shown in Figure 3. Moreover, car arrival patterns are observed on weekdays, with the busiest hours being noon (at 1.00 p.m.) and evening (at 6.00 p.m.). Most cars arriving at the shopping center spend about 20 to 60 min, with some exceptions of long-staying users for operating the business or other purposes. Based on such observations, the simulation data regarding the car stay time are typically set from a predefined distribution, which provides a median parking time (stay time plus time to walk to and from the car) of 38 min.
First, we consider some typical optimization schemes, as stated above, without considering emission-classified car information to evaluate our proposed system better. Specifically, the Traditional (or greedy) method (based on (3) and (4)) is considered, where most drivers prefer to park near the entrance of the shopping complex (due to the shortest walking distance), often resulting in the increased driving distance as to find better parking spots in a real case. Such Traditional method, as the weight parameter of (3) is set as , ignores costs of the driving distance or respective CO2 emissions. When the parking allocation is chosen randomly using the Uncontrolled method, the optimization parameter settings are not required. This random method is better than the traditional method since driving or walking distances are chosen randomly, reducing the overall driving distance. Next, we consider a Balanced (or controlled) method as given by (5), equally treating costs for driving and walking distances by choosing .
In the proposed eco-friendly system for EVs, a lower weight with driving distance denotes a higher weight () with walking distance than the respective values for GVs. An improper choice of them may lead to worsening overall user comfort by excessively emphasizing and facilitating the users of EVs to better locations. Therefore, are tuned in such a way as to minimize the driving distance of GVs while ensuring the overall walking distance of all users is the same as balanced optimal allocation (which uses the same weight for EVs and GVs). Specifically, the optimization parameters of the proposed eco-friendly parking allocation system are set as m, m, , and based on the above techniques.
Finally, in the proposed Eco-friendly method, we incorporate the information on emission-classified vehicles into the parking allocation system as stated by (6)–(8), besides incorporating the number of users in the car for their comfort. Moreover, to reduce CO2 emissions, better incentives are provided for eco-friendly vehicles (e.g., EVs (or HEVs)) to have more driving access as they produce almost zero emissions during low-speed driving. With such parameter settings, the four parking allocation methods are evaluated independently for weekday parking allocation tasks, and the results are compared by taking the averages of the five days. To estimate fuel consumption and CO2 emissions of vehicles based on their instantaneous speed and acceleration for typical parking maneuvers, the VT-micro model [35] is used. The VT-Micro model is widely known for having a simple structure and is often employed to evaluate fuel consumption and emissions in transportation studies [36,37,38]. Note that within a closed parking facility, vehicles need to drive at a low but steady speed to find a suitable parking spot; hence, we consider a maximum driving speed of 15 km/h.
3.3. Simulation Results Analysis
At first, the day-long performance data are observed from the simulation when the proposed scheme is employed. Particularly, we analyzed distributions of walking and driving distances of vehicles in the study parking space based on their (emission-classified) types as illustrated in Figure 4. It is found that the EVs (or HEVs) are allocated to parking spots with less walking distances compared to GVs (as shown in Figure 4a), particularly between 10 m and 30 m from the entrance of the complex. On the other hand, GVs are mainly allocated near the parking entrance (within 150 m) such that they have shorter driving distances than EVs (or HEVs), as shown in Figure 4b. Such a dynamic allocation of parking spaces based on vehicle types by the proposed scheme has certain benefits. Specifically, shorter driving distances of GVs may cause lower emissions and fuel consumption in the parking space, while shorter walking distances of EVs (or HEVs) may provide better comfort to the users.
Next, we analyzed the performance of typical optimization techniques, e.g., the Traditional, Uncontrolled, and Balanced, and compared them to our proposed Eco-friendly method. Figure 5a,b, respectively, show the average walking and driving distances of emission-classified vehicles by the optimization methods. In Figure 5a, the average walking distance of overall cars by the proposed Eco-friendly method is equal to the Balanced method, while the Traditional method has a slightly higher walking distance, and the Uncontrolled method has the largest walking distance compared to other methods. Furthermore, the average walking distances of GVs and EVs (or HEVs) are almost equal in the Traditional, Uncontrolled, and Balanced methods, whereas the average walking distances of EVs (or HEVs) are reduced, and GVs are increased in the proposed Eco-friendly method.
In Figure 5b, the average driving distance of overall cars is equal for both the Balanced and proposed Eco-friendly methods. In contrast, the Traditional and Uncontrolled methods have significantly higher driving distances. Moreover, the average driving distances of GVs and EVs (or HEVs) are almost equal in the Traditional, Uncontrolled, and Balanced methods. On the other hand, the average driving distances of EVs (or HEVs) are increased, and GVs are reduced in the proposed Eco-friendly method. The comparison of average walking and driving distances of emission-classified vehicles by the Traditional, Uncontrolled, Balanced, and Eco-friendly methods is given in Table 1. Concerning the overall car, the walking and driving distances are almost identical for the Eco-friendly and Balanced method. This is because the parameters of the Eco-friendly method are tuned so that overall average performances remain the same. However, within these vehicles, the respective distances of EVs and GVs have significant differences where the walking distance for GVs increased by 27.97% and for EVs decreased by 43.25%, regarding the Balanced method. Furthermore, it is worth noting that the driving distance for EVs has increased by 23.50%, while the driving distance for GVs has decreased by 15.62%. Note that the Eco-friendly optimization method moderately increases the driving distance of EVs (or HEVs) compared to GVs to facilitate an emission-free and fuel-efficient environment in the parking space compared to other typical optimization techniques while minimizing walking distance as an incentive to improve the user comfort.
The comparison of average CO2 emission and average fuel consumption of vehicles by the Traditional, Uncontrolled, Balanced, and Eco-friendly methods is illustrated in Figure 6. The results show that the proposed Eco-friendly method significantly outperformed other typical parking allocation methods in reducing CO2 emission and fuel consumption of vehicles. Specifically, the proposed Eco-friendly method reduces the CO2 emission of vehicles by 11.44%, 21.56%, and 23.41% compared to the Balanced, Uncontrolled, and Traditional methods, respectively. A similar reduction in fuel consumption, hence the respective fuel cost saving, is realized. These performance improvements are achieved since the proposed Eco-friendly method considered emission-classified vehicle types in the optimization process.
We analyze average walking and driving distances based on the occupancy percentage of the parking facility when the vehicles arrive, as given in Table 2. It is found that the average walking and driving distances at an occupancy percentage over 60% exceed the average distance of overall cars in a day, which implies that when the occupancy percentage approaches its maximum, providing parking allocation with similar incentives becomes complicated for every user due to the limited parking availability. The proposed Eco-friendly model can extend maximum advantages up to 60% occupancy, and even for higher occupancy, it still yields significantly better results than any other models. Note that when the best spots (with the least driving or walking) are already occupied, the model must choose from the limited choices from the remaining spots (even if they are in the worst category). Note that no parking allocation scheme can give a very comfortable spot if there is a limited vacancy and the car must wait a long time in a queue if the occupancy is 100%.
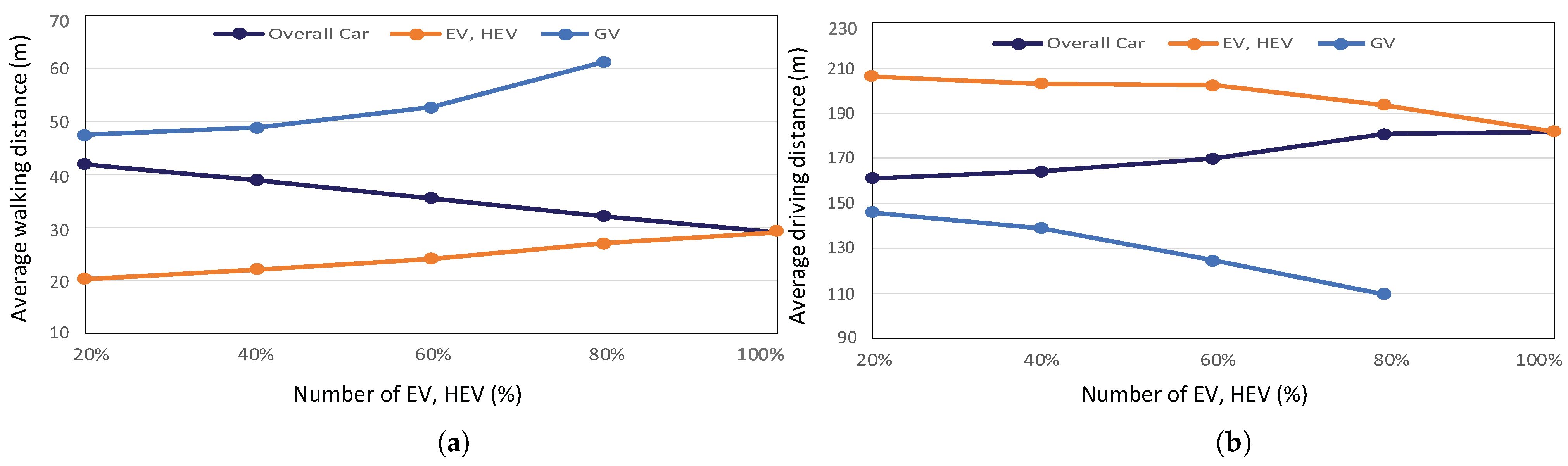
Finally, we analyze the performance of the proposed Eco-friendly method for different penetration or market arrival rates of EVs (or HEVs). In particular, the arrival rates of EVs (or HEVs) vary from 20% to 100%, with a step of 20%, and the walking and driving distances are generated using numerical simulations as above. Then, the average walking and driving distances of GVs, EVs (or HEVs), and overall cars are calculated as shown in Figure 7. It is found that the average walking distance for GVs and EVs (or HEVs) gradually increased, while the average walking distance for overall cars gradually decreased with the penetration rates of EVs (or HEVs) (as shown in Figure 7a). On the other hand, as depicted in Figure 7b, the average driving distance for GVs and EVs (or HEVs) gradually decreased with the penetration rates of EVs (or HEVs), while the average driving distance for overall cars slowly increased. Table 3 outlines the effect of the proposed Eco-friendly method on average CO2 emission and fuel consumption for varying EVs (or HEVs) penetration rates in the study parking space. It is found that the CO2 emissions and fuel consumption were reduced significantly by the proposed Eco-friendly method as the penetration of EVs (or HEVs) increased. Therefore, implementing the proposed Eco-friendly method based on emission-classified vehicle types can significantly enhance environmental sustainability within a parking space. Note that non-eco cars (GVs) can have different emission levels depending on the car size or engine characteristics. In this study, other categories of GVs are not considered. However, such categories of GVs can be incorporated into the proposed system.
4. Discussion
In this study, we have implemented the proposed model for a single floor case to exemplify better the underlying decision mechanism and the respective merits. However, our proposed model is a generalized one, which can be implemented for even more complex parking with multi-floor structures with proper modeling (walking–driving distances for each point) if they are under shared entry–exit paths. In the future, it is necessary to address the modeling of the parking lot in the case of multiple entries and exits, considering various traffic demands and user preferences and evaluating them through simulation.
We considered the context of a single large parking lot (e.g., a shopping center) for users who want explicitly to park there (instead of going to other available parking facilities within the city). Although all cars are destined for the entire parking lot, typical users desire a more comfortable spot (e.g., near the shopping entrance) associated with less walking, which may cause conflicts, resulting in even longer driving distances, user discomfort, and pollution. Our proposed method optimally provides relatively more comfortable spots (near the shopping entrance) to EV users than GV users by carefully regulating their driving distances only to some extent, which is very acceptable to them. For a realistic implementation, we assume that each car is bound to use the given allocation (i.e., each user parks his car at the designated point) like many existing parking management systems. Consequently, there might need to be a strategy other than the recommendation-based approach to ensure that everyone is adhering to the allocation and reaping the full benefits of the proposed model. However, the issue of whether it should be mandatory or how to enforce it is related to acceptance behavior, which is beyond the scope of this paper.
When a few vehicles in a group come at a particular time, with different types of cars, they will be placed at various spots under the proposed model. A pre-booking system with exact arrival timing can be very suitable to address such cases, where the model can make a predictive optimal allocation to maximize the utilization of the parking points (avoiding the unused time of the critical location due to advanced reservation). Such a predictive optimal allocation needs estimation of car staying time with an appropriate strategy, which can be an interesting extension of this work.
An individual driving model can be implemented with previous driving data using a learning algorithm to improve the parking allocation efficiency further. Moreover, the parking allocation can be adjusted to maintain a 60–80% occupancy rate by modeling a higher level of demand regulation mechanism (e.g., information sharing, operation scheduling, or incentivizing) that can be effective in influencing the users to avoid peak hours, which is kept as the extended work of this study.
Pricing policies are one influential factor in ensuring an efficient parking management system. Considering the standard parking lots in Japan, we assume that every parking spot is priced equally throughout the entire parking area and the users are aware of the time-pricing and stay time accordingly. Although the duration of a passenger’s stay depends on pricing policies, this work does not control the individual’s stay time. Instead, our proposed model decides which car should be allocated where under any consistent pricing policy for the entire park.
5. Conclusions
A smart parking management system is needed to pave the way for a modern society in the future. The system should be energy-efficient and environmentally friendly while being oriented to user comfort. With such expectations, in this paper, we have proposed an eco-friendly smart parking management system that considers the information on emission-classified incoming cars and users to sequentially allocate the optimal parking spot and minimize the total emissions in the parking facility. The proposed system is simulated for managing a model car parking facility of a shopping complex in Japan, and the car allocation performances related to average CO2 emission and average user walking comfort are evaluated and compared to other typical parking management systems. Remarkable reductions in fuel consumption and CO2 emissions are obtained compared to the traditional greedy and typical optimal allocation systems. The adaptive objective function, including distinct driving costs for GVs and EVs (based on their emission characteristics), enables the proposed system to reduce the total driving distance by the GVs to reduce emissions without worsening the overall walking comforts of all users during the operation. As a result of optimization, EVs tend to drive longer to facilitate lesser driving distance to the GVs. Notably, in return, users of EVs are incentivized with less walking distance (or better comfort). Such an eco-friendly optimal parking allocation system is expected to boost the use of EVs further and enhance sustainability and comfort towards highly efficient mobility services for the future society.
The proposed parking allocation scheme yields great performance when the parking facility was up to moderately congested. In a fully crowded situation, an incoming car may have to wait and only be allowed to park at the immediately vacant spot only. This could be an interesting idea: to spread the incoming traffic over a day instead of creating peak congestion at one particular time. Future research should address this issue by advising the users or providing some incentives to change individual incoming and staying patterns in the parking facility.
Author Contributions
Conceptualization, N.S., A.S.M.B. and M.A.S.K.; methodology, N.S., A.S.M.B. and M.A.S.K.; software, N.S.; validation, S.S., M.A.S.K. and K.Y.; formal analysis, N.S.; investigation, S.S. and M.A.S.K.; resources, S.S. and M.A.S.K.; data curation, N.S.; writing—original draft preparation, N.S.; writing—review and editing, A.S.M.B., S.S., M.A.S.K. and K.Y.; visualization, N.S.; supervision, A.S.M.B., S.S., M.A.S.K. and K.Y.; project administration, A.S.M.B. and M.A.S.K.; funding acquisition, M.A.S.K. All authors have read and agreed to the published version of the manuscript.
Funding
The authors acknowledge financial support from the Japan Society for the Promotion of Science (JSPS) Grants-in-Aid for Scientific Research (C) 23K03898.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Leonardo, G.; Cheein, F.A. The role of 5G technologies: Challenges in smart cities and intelligent transportation systems. Sustainability 2020, 12, 6469. [Google Scholar]
- Paiva, S.; Ahad, M.A.; Tripathi, G.; Feroz, N.; Casalino, G. Enabling technologies for urban smart mobility: Recent trends, opportunities and challenges. Sensors 2021, 21, 2143. [Google Scholar] [CrossRef] [PubMed]
- Bakibillah, A.S.M.; Paw, Y.F.; Kamal, M.A.S.; Susilawati, S.; Tan, C.P. An Incentive Based Dynamic Ride-Sharing System for Smart Cities. Smart Cities 2021, 4, 532–547. [Google Scholar] [CrossRef]
- Šolić, P.; Leoni, A.; Colella, R.; Perković, T.; Catarinucci, L.; Stornelli, V. IoT-ready energy-autonomous parking sensor device. IEEE Int. Things J. 2020, 8, 4830–4840. [Google Scholar] [CrossRef]
- Chauhan, V.; Patel, M.; Tanwar, S.; Tyagi, S.; Kumar, N. IoT Enabled real-time urban transport management system. Comput. Electr. Eng. 2020, 86, 106746. [Google Scholar] [CrossRef]
- Al-Turjman, F.; Malekloo, A. Smart parking in IoT-enabled cities: A survey. Sustain. Cities Soc. 2019, 49, 101608. [Google Scholar] [CrossRef]
- Zhu, F.; Lv, Y.; Chen, Y.; Wang, X.; Xiong, G.; Wang, F.Y. Parallel transportation systems: Toward IoT-enabled smart urban traffic control and management. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4063–4071. [Google Scholar] [CrossRef]
- Xiaotian, W.; Wang, X. Flexible parking reservation system and pricing: A continuum approximation approach. Transp. Res. Part B Methodol. 2019, 128, 408–434. [Google Scholar]
- Zhang, Y.; Wang, C.Y.; Wei, H.Y. Parking reservation auction for parked vehicle assistance in vehicular fog computing. IEEE Trans. Veh. Technol. 2019, 68, 3126–3139. [Google Scholar] [CrossRef]
- Wu, W.; Liu, W.; Zhang, F.; Dixit, V. A new flexible parking reservation scheme for the morning commute under limited parking supplies. Netw. Spat. Econ. 2021, 21, 513–545. [Google Scholar] [CrossRef]
- Lu, E.H.C.; Liao, C.H. Prediction-based parking allocation framework in urban environments. Int. J. Geogr. Inf. Sci. 2020, 34, 1873–1901. [Google Scholar] [CrossRef]
- Wang, P.; Guan, H.; Liu, P. Modeling and solving the optimal allocation-pricing of public parking resources problem in urban-scale network. Transp. Res. Part B Methodol. 2020, 137, 74–98. [Google Scholar] [CrossRef]
- Mladenović, M.; Delot, T.; Laporte, G.; Wilbaut, C. A scalable dynamic parking allocation framework. Comput. Oper. Res. 2021, 125, 105080. [Google Scholar] [CrossRef]
- Somani, A.; Periwal, S.; Patel, K.; Gaikwad, P. Cross platform smart reservation based parking system. In Proceedings of the IEEE International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; pp. 1–5. [Google Scholar]
- Sadreddini, Z.; Guner, S.; Erdinc, O. Design of a decision-based multicriteria reservation system for the EV parking lot. IEEE Trans. Transp. Electrif. 2021, 7, 2429–2438. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Xie, N. A reservation and allocation model for shared-parking addressing the uncertainty in drivers’ arrival/departure time. Transp. Res. Part C Emerg. Technol. 2022, 135, 103484. [Google Scholar] [CrossRef]
- Sudhakar, M.V.; Reddy, A.A.; Mounika, K.; Kumar, M.S.; Bharani, T. Development of smart parking management system. Mater. Today Proc. 2023, 80, 2794–2798. [Google Scholar] [CrossRef]
- Melnyk, P.; Djahel, S.; Nait-Abdesselam, F. Towards a smart parking management system for smart cities. In Proceedings of the IEEE International Smart Cities Conference (ISC2), Casablanca, Morocco, 14–17 October 2019; pp. 542–546. [Google Scholar]
- Christiansen, P.; Engebretsen, Ø.; Fearnley, N.; Hanssen, J.U. Parking facilities and the built environment: Impacts on travel behaviour. Transp. Res. Part A Policy Pract. 2017, 95, 198–206. [Google Scholar] [CrossRef]
- Cai, Y.; Chen, J.; Zhang, C.; Wang, B. A parking space allocation method to make a shared parking strategy for appertaining parking lots of public buildings. Sustainability 2018, 11, 120. [Google Scholar] [CrossRef]
- Kim, O.T.T.; Tran, N.H.; Pham, C.; LeAnh, T.; Thai, M.T.; Hong, C.S. Parking assignment: Minimizing parking expenses and balancing parking demand among multiple parking lots. IEEE Trans. Autom. Sci. Eng. 2019, 17, 1320–1331. [Google Scholar]
- Taiga, S.; Bakibillah, A.S.M.; Hashikura, K.; Kamal, M.A.S.; Yamada, K. A User-Oriented Adaptive-Optimal Car Parking Management System Towards Smart Livings. Int. J. Eng. Mater. Manuf. 2021, 6, 202–208. [Google Scholar] [CrossRef]
- Zargayouna, M.; Balbo, F.; Ndiaye, K. Generic model for resource allocation in transportation: Application to urban parking management. Transp. Res. Part Emerg. Technol. 2016, 71, 538–554. [Google Scholar] [CrossRef]
- Chou, S.Y.; Dewabharata, A.; Zulvia, F.E. Dynamic space allocation based on internal demand for optimizing release of shared parking. Sensors 2021, 22, 235. [Google Scholar] [CrossRef] [PubMed]
- Errousso, H.; El Ouadi, J.; Benhadou, S. Dynamic parking space allocation at urban scale: Problem formulation and resolution. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 9576–9590. [Google Scholar] [CrossRef]
- Lei, C.; Zhang, Q.; Ouyang, Y. Planning of parking enforcement patrol considering drivers’ parking payment behavior. Transp. Res. Part B Methodol. 2017, 106, 375–392. [Google Scholar] [CrossRef]
- Lin, J.; Chen, S.Y.; Chang, C.Y.; Chen, G. SPA: Smart parking algorithm based on driver behavior and parking traffic predictions. IEEE Access 2019, 7, 34275–34288. [Google Scholar] [CrossRef]
- Jemmali, M.; Melhim, L.K.B.; Alharbi, M.T.; Bajahzar, A.; Omri, M.N. Smart-parking management algorithms in smart city. Sci. Rep. 2022, 12, 6533. [Google Scholar] [CrossRef] [PubMed]
- Reyes-Rubiano, L.; Serrano-Hernandez, A.; Montoya-Torres, J.R.; Faulin, J. The sustainability dimensions in intelligent urban transportation: A paradigm for smart cities. Sustainability 2021, 13, 10653. [Google Scholar] [CrossRef]
- Nanaki, E.A. Electric Vehicles for Smart Cities: Trends, Challenges, and Opportunities; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Dzikuć, M.; Adamczyk, J.; Piwowar, A. Problems associated with the emissions limitations from road transport in the Lubuskie Province (Poland). Atmos. Environ. 2017, 160, 1–8. [Google Scholar] [CrossRef]
- Oshiro, K.; Masui, T.; Kainuma, M. Transformation of Japan’s energy system to attain net-zero emission by 2050. Carbon Manag. 2018, 9, 493–501. [Google Scholar] [CrossRef]
- Rosales-Tristancho, A.; Brey, R.; Carazo, A.F.; Brey, J.J. Analysis of the barriers to the adoption of zero-emission vehicles in Spain. Transp. Res. Part A Policy Pract. 2022, 158, 19–43. [Google Scholar] [CrossRef]
- Japan Electric Vehicles. International Trade Administration. Available online: https://www.trade.gov/market-intelligence/japan-electric-vehicles (accessed on 25 November 2023).
- Rakha, H.; Ahn, K.; Trani, A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions. Transp. Res. Part D Transp. Environ. 2004, 9, 49–74. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J.I. Fuzzy-tuned model predictive control for dynamic eco-driving on hilly roads. Appl. Soft Comput. 2021, 99, 106875. [Google Scholar] [CrossRef]
- Yao, Z.; Wang, Y.; Liu, B.; Zhao, B.; Jiang, Y. Fuel consumption and transportation emissions evaluation of mixed traffic flow with connected automated vehicles and human-driven vehicles on expressway. Energy 2021, 230, 120766. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J.I. Optimal eco-driving scheme for reducing energy consumption and carbon emissions on curved roads. Heliyon 2024, 10, e23586. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Operating process of the proposed eco-friendly optimal parking allocation system.

Figure 2.
Model layout based on a real parking lot of a shopping complex in Japan. The arrows indicate the traveling directions of vehicles.
Figure 2.
Model layout based on a real parking lot of a shopping complex in Japan. The arrows indicate the traveling directions of vehicles.

Figure 3.
Hourly arrival patterns of cars in the parking facility from 7 a.m. to 11 p.m. with emission-classified vehicle types in a single weekday.
Figure 3.
Hourly arrival patterns of cars in the parking facility from 7 a.m. to 11 p.m. with emission-classified vehicle types in a single weekday.
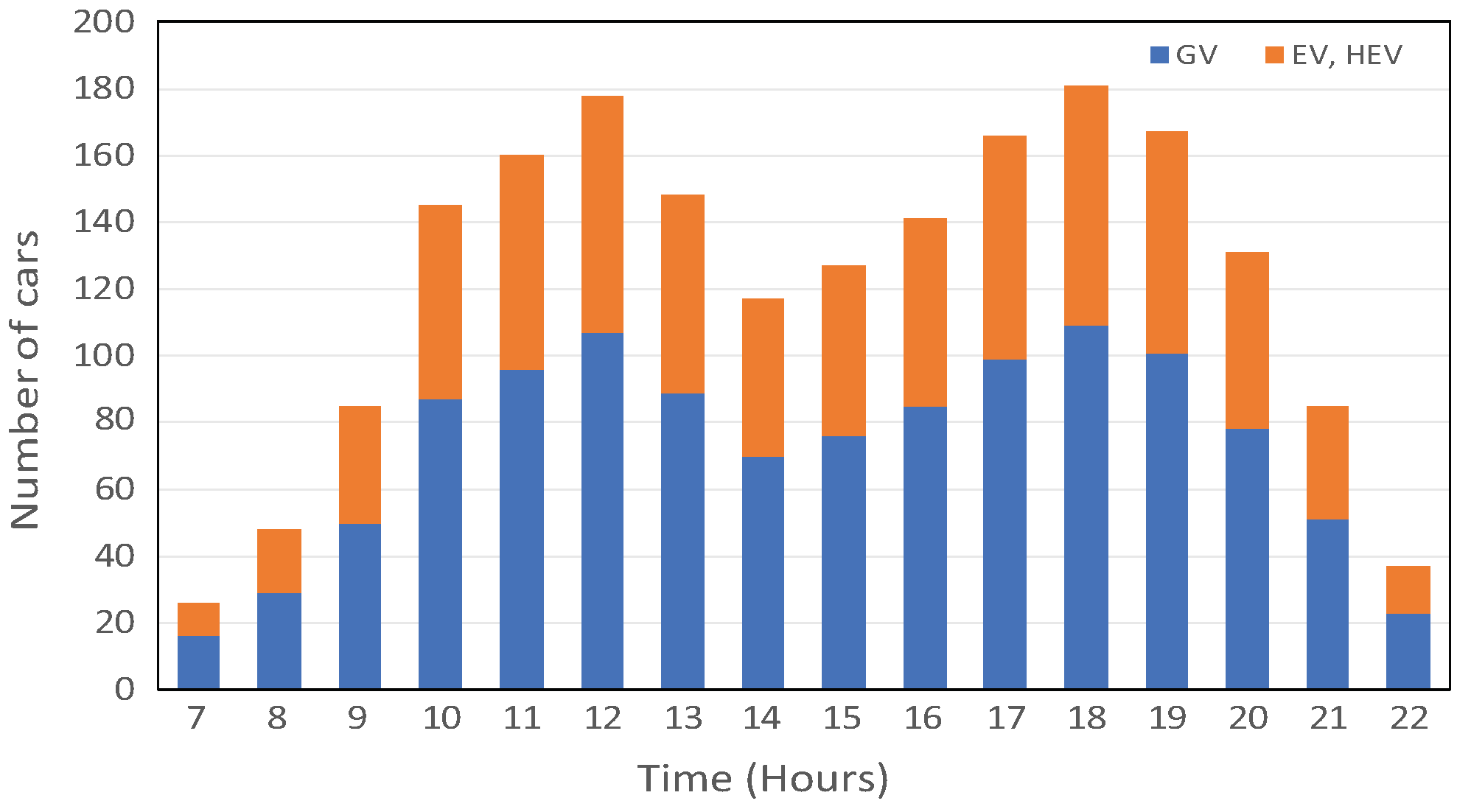
Figure 4.
Distributions of (a) walking and (b) driving distances of emission-classified vehicles in the study parking space.
Figure 4.
Distributions of (a) walking and (b) driving distances of emission-classified vehicles in the study parking space.
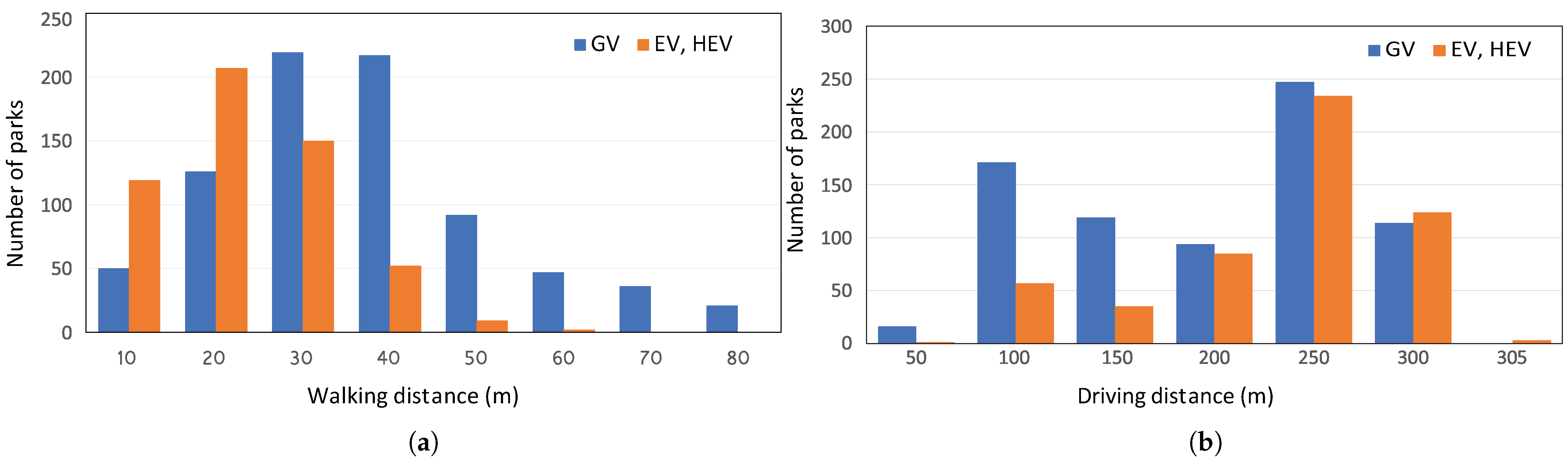
Figure 5.
Comparison of (a) average walking distance and (b) average driving distance of emission-classified vehicles by the Traditional, Uncontrolled, Balanced, and Eco-friendly methods.
Figure 5.
Comparison of (a) average walking distance and (b) average driving distance of emission-classified vehicles by the Traditional, Uncontrolled, Balanced, and Eco-friendly methods.
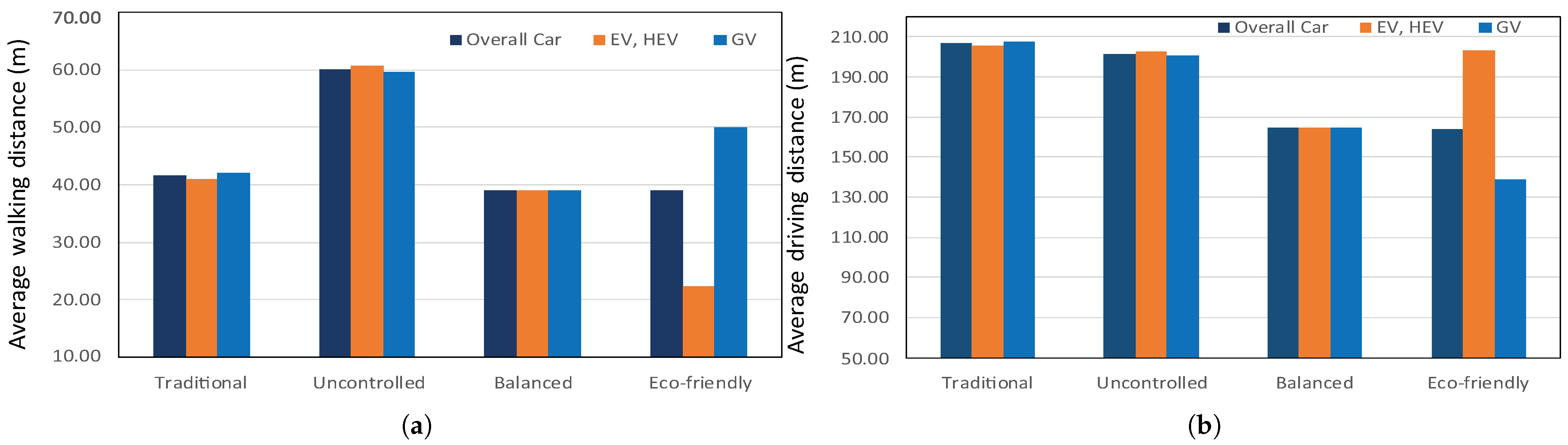
Figure 6.
Comparison of (a) average CO2 emission and (b) average fuel consumption of emission-classified vehicles by the Traditional, Uncontrolled, Balanced, and Eco-friendly methods.
Figure 6.
Comparison of (a) average CO2 emission and (b) average fuel consumption of emission-classified vehicles by the Traditional, Uncontrolled, Balanced, and Eco-friendly methods.
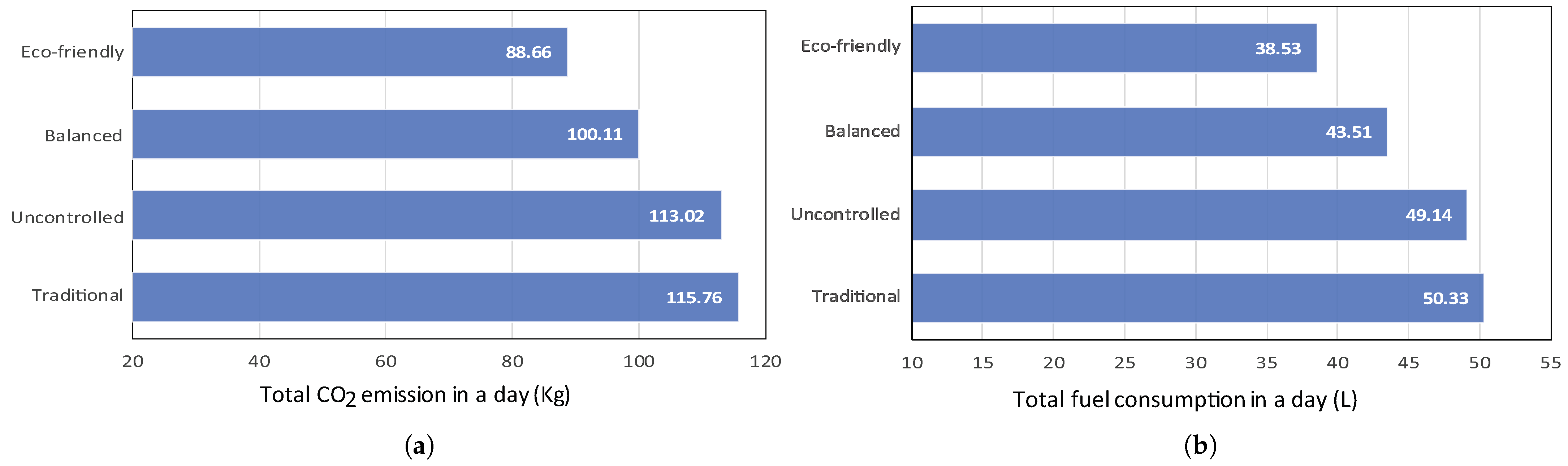
Figure 7.
(a) Average walking distance and (b) average driving distance of vehicles for various arrival rates of EVs (or HEVs) in the study parking space.
Figure 7.
(a) Average walking distance and (b) average driving distance of vehicles for various arrival rates of EVs (or HEVs) in the study parking space.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of average walking distance and average driving distance (each vehicle) by the optimization methods and the change (%) of distances given in parenthesis for the Eco-friendly method compared to the Balanced method.
Table 1.
Comparison of average walking distance and average driving distance (each vehicle) by the optimization methods and the change (%) of distances given in parenthesis for the Eco-friendly method compared to the Balanced method.
| Vehicle Types | Traditional | Uncontrolled | Balanced | Eco-Friendly |
|---|---|---|---|---|
| Average walking distance (m) | ||||
| Overall car | 41.68 | 60.00 | 39.12 | 39.10 |
| EV, HEV | 41.01 | 60.66 | 39.12 | 22.20 (−43.25%) |
| GV | 42.12 | 59.56 | 39.12 | 50.06 (+27.97%) |
| Average driving distance (m) | ||||
| Overall car | 206.89 | 201.60 | 164.48 | 164.41 |
| EV, HEV | 205.83 | 202.59 | 164.45 | 203.10 (+23.50%) |
| GV | 207.58 | 200.94 | 164.45 | 138.76 (−15.62%) |
Table 2.
Average walking and driving distance of vehicles based on occupancy percentage (%) in the parking space.
Table 2.
Average walking and driving distance of vehicles based on occupancy percentage (%) in the parking space.
| Parking Occupancy (%) | Walking Distance (m) | Driving Distance (m) |
|---|---|---|
| 0–20% | 34.95 | 139.79 |
| 20–40% | 36.35 | 148.56 |
| 40–60% | 38.37 | 164.20 |
| 60–80% | 41.10 | 179.25 |
| 80 to Up% | 44.94 | 190.27 |
| Overall car | 39.10 | 164.41 |
Table 3.
Effect on average CO2 emission and fuel consumption for varying EVs (or HEVs) penetration rates in the study parking space.
Table 3.
Effect on average CO2 emission and fuel consumption for varying EVs (or HEVs) penetration rates in the study parking space.
| EV, HEV (%) | GV (%) | CO2 Emission (Kg) | Fuel Consumption (L) |
|---|---|---|---|
| 20 | 80 | 99.78 | 43.33 |
| 40 | 60 | 81.02 | 35.19 |
| 60 | 40 | 57.88 | 25.15 |
| 80 | 20 | 29.94 | 13.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sakib, N.; Bakibillah, A.S.M.; Susilawati, S.; Kamal, M.A.S.; Yamada, K. Eco-Friendly Smart Car Parking Management System with Enhanced Sustainability. Sustainability 2024, 16, 4145. https://doi.org/10.3390/su16104145
AMA Style
Sakib N, Bakibillah ASM, Susilawati S, Kamal MAS, Yamada K. Eco-Friendly Smart Car Parking Management System with Enhanced Sustainability. Sustainability. 2024; 16(10):4145. https://doi.org/10.3390/su16104145
Chicago/Turabian StyleSakib, Nazmus, A. S. M. Bakibillah, Susilawati Susilawati, Md Abdus Samad Kamal, and Kou Yamada. 2024. "Eco-Friendly Smart Car Parking Management System with Enhanced Sustainability" Sustainability 16, no. 10: 4145. https://doi.org/10.3390/su16104145
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.