Development of a PHEV Hybrid Transmission for Low-End MPVs Based on AMT



Abstract
1. Introduction
2. Statistical Law of New Energy Vehicles
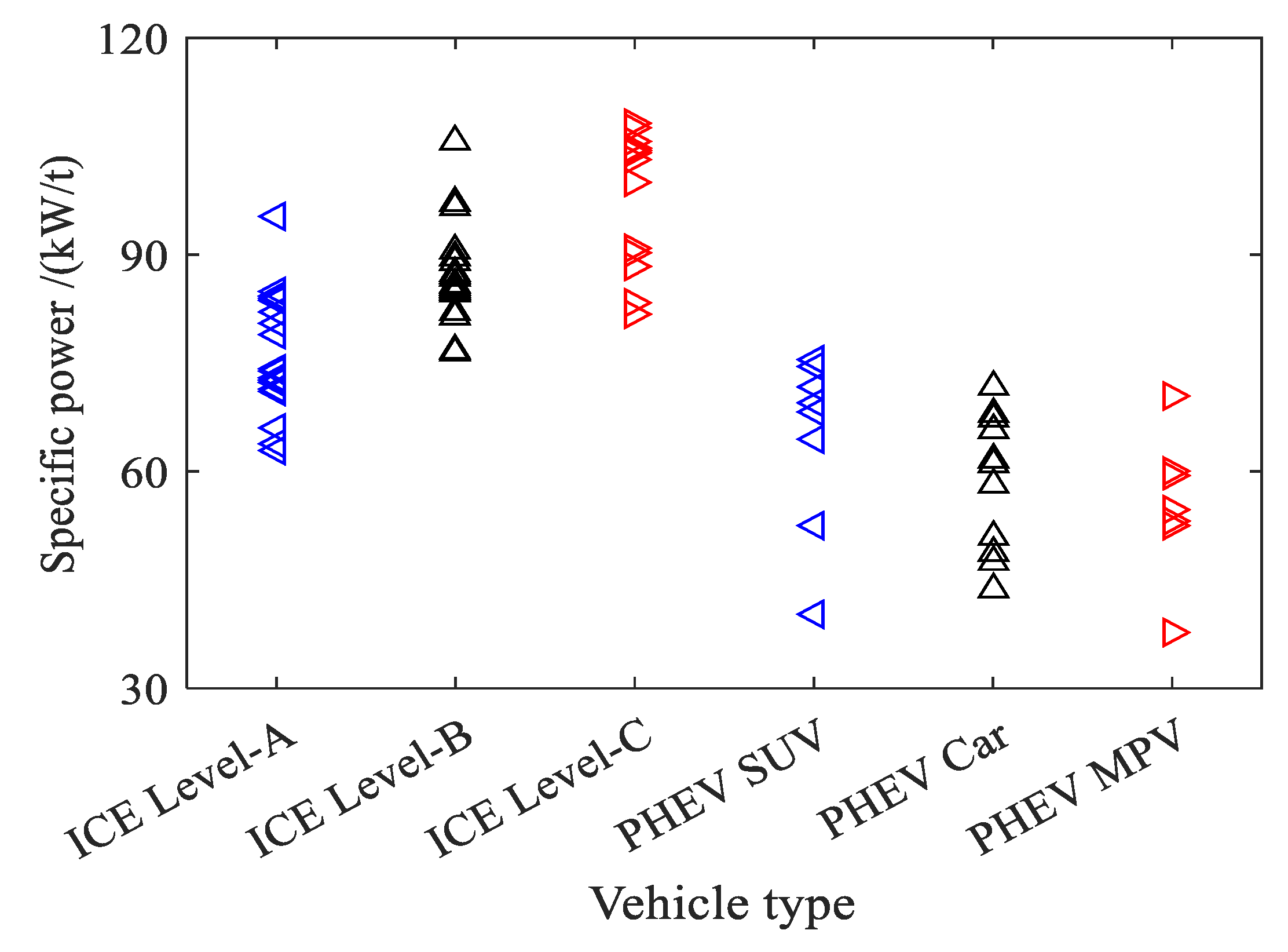
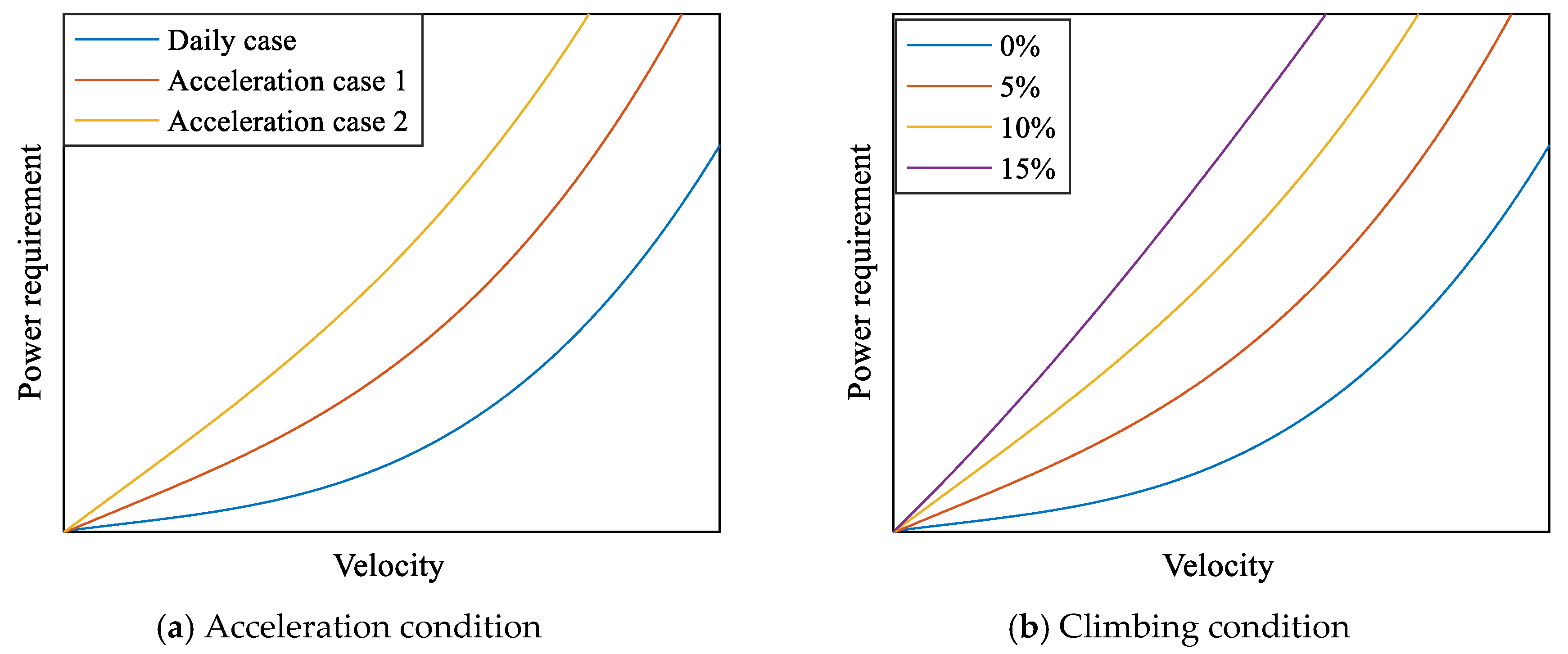
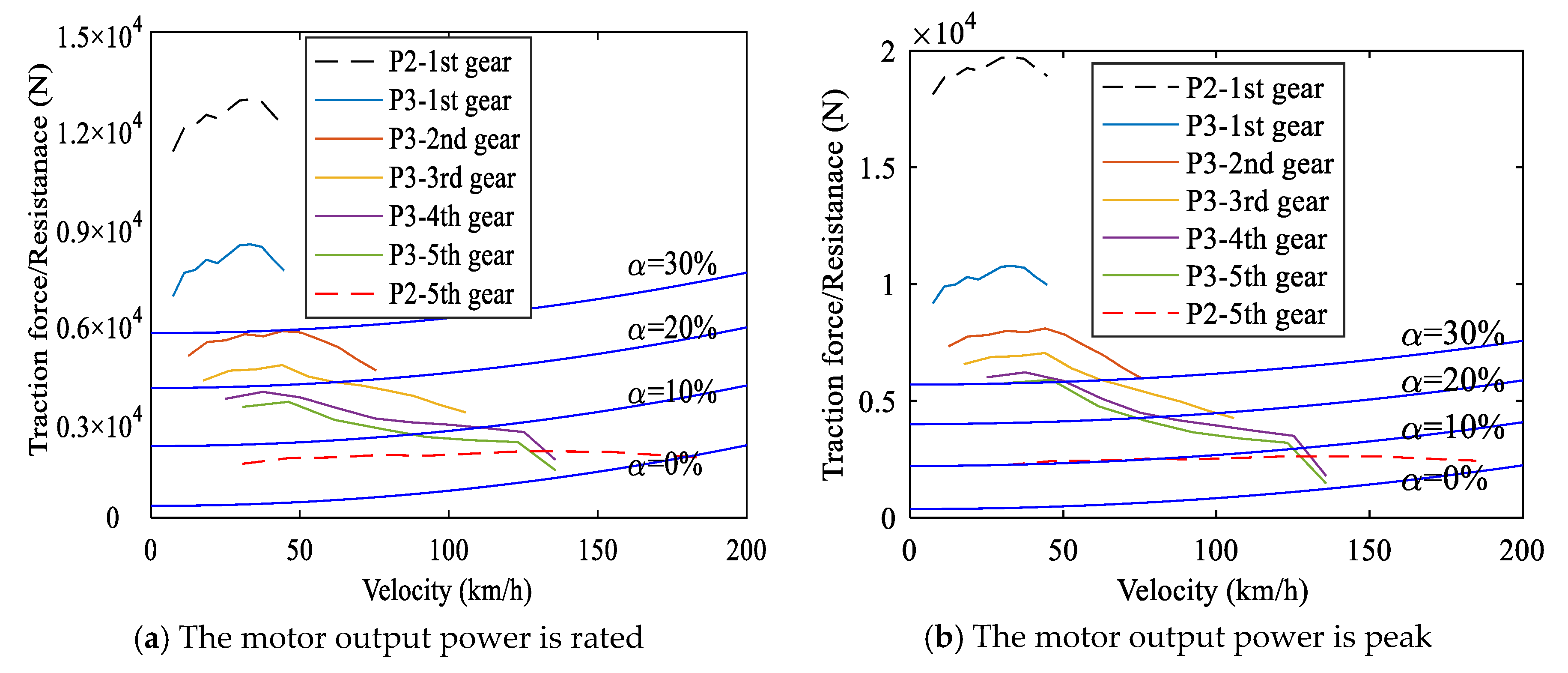
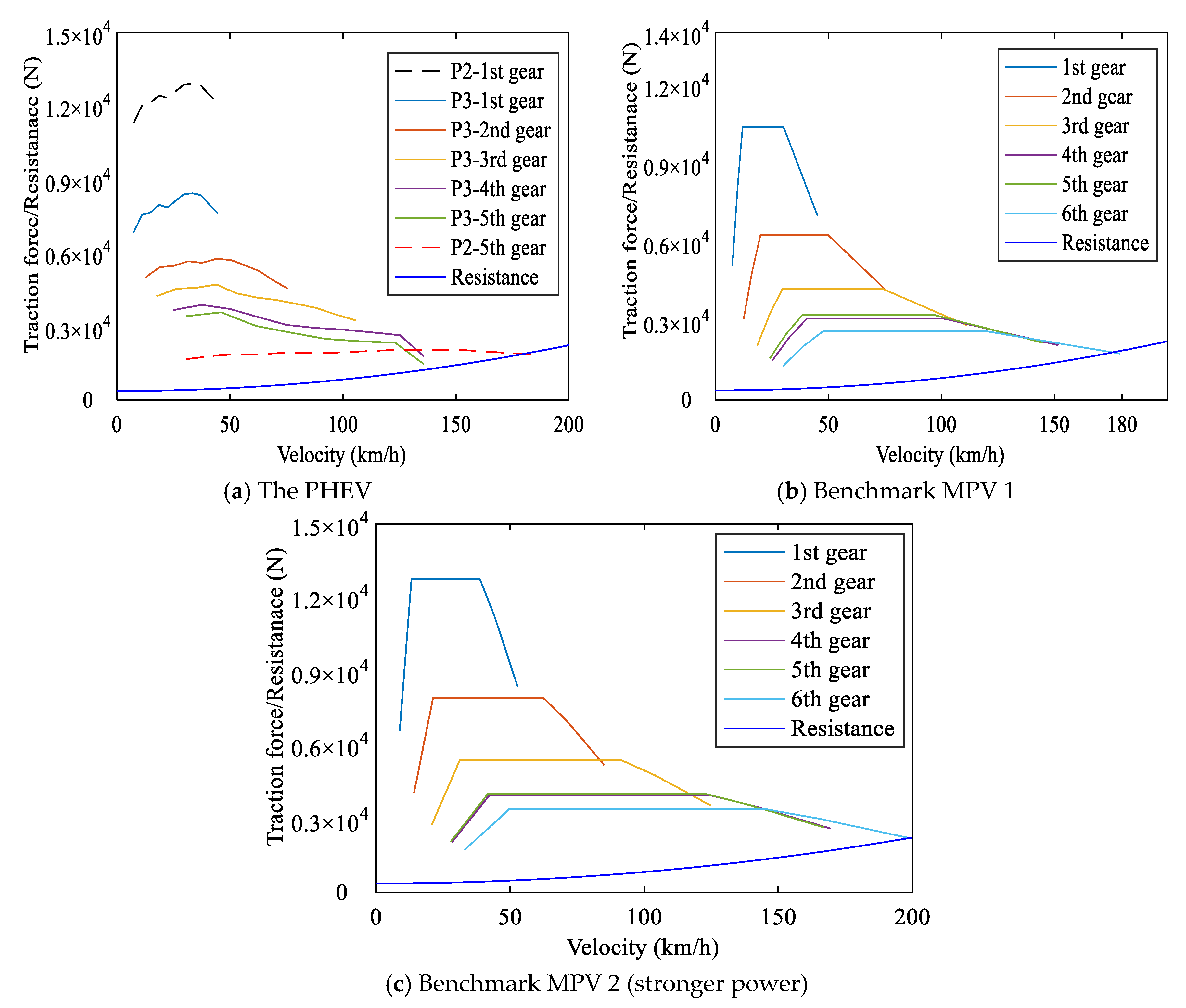
2.1. PHEV Power Demand
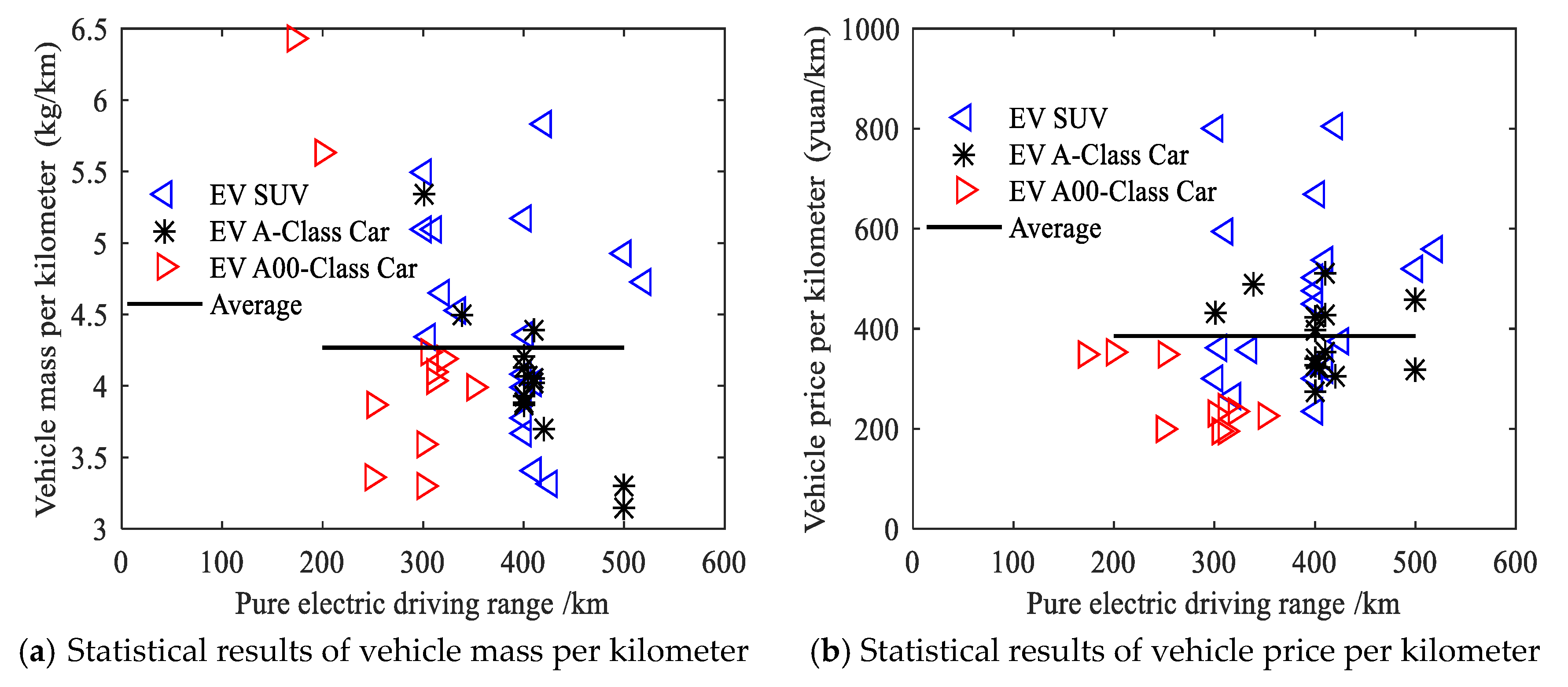
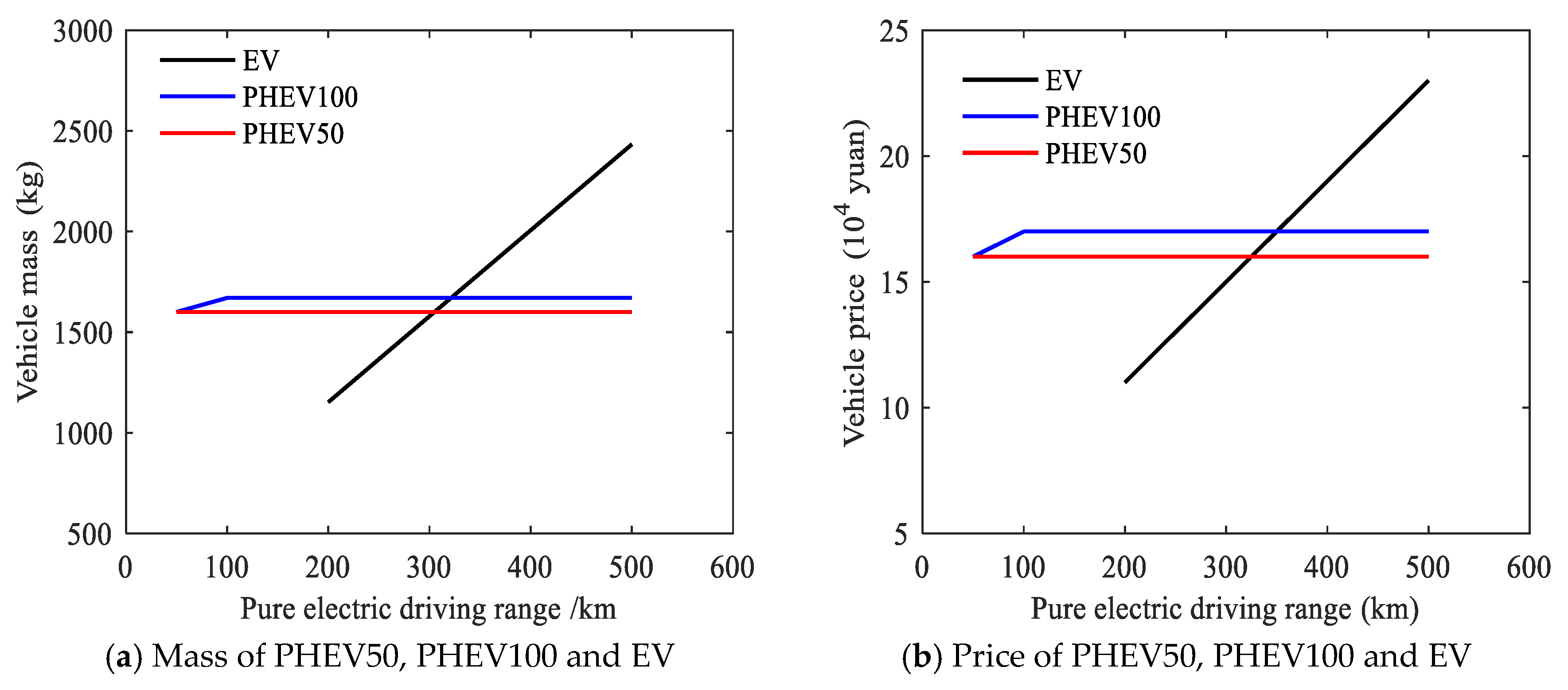
2.2. PHEV Energy Demand and Cost Analysis
3. Configuration and Parameter Design of PHEV Hybrid Transmission Based on AMT
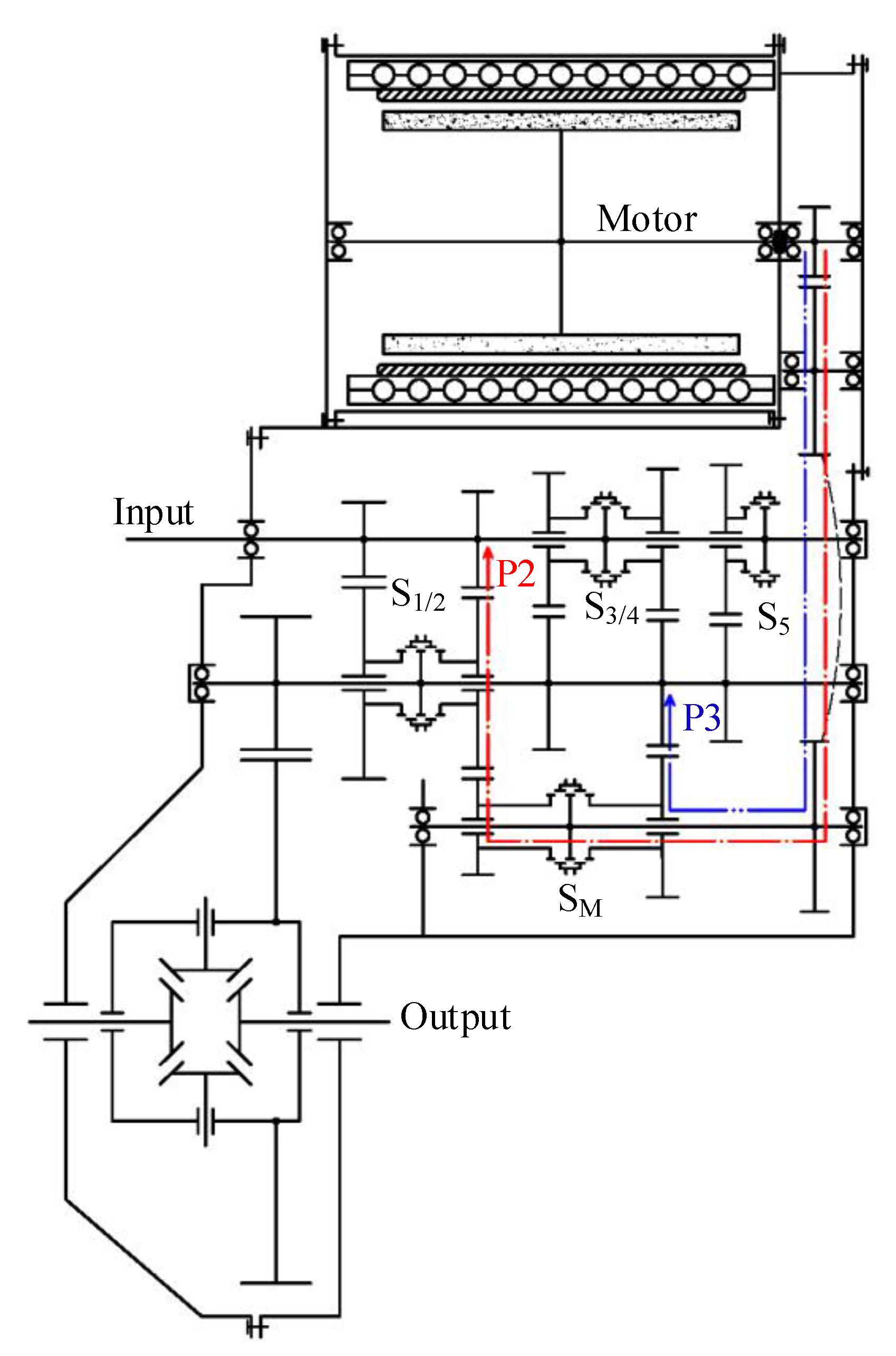
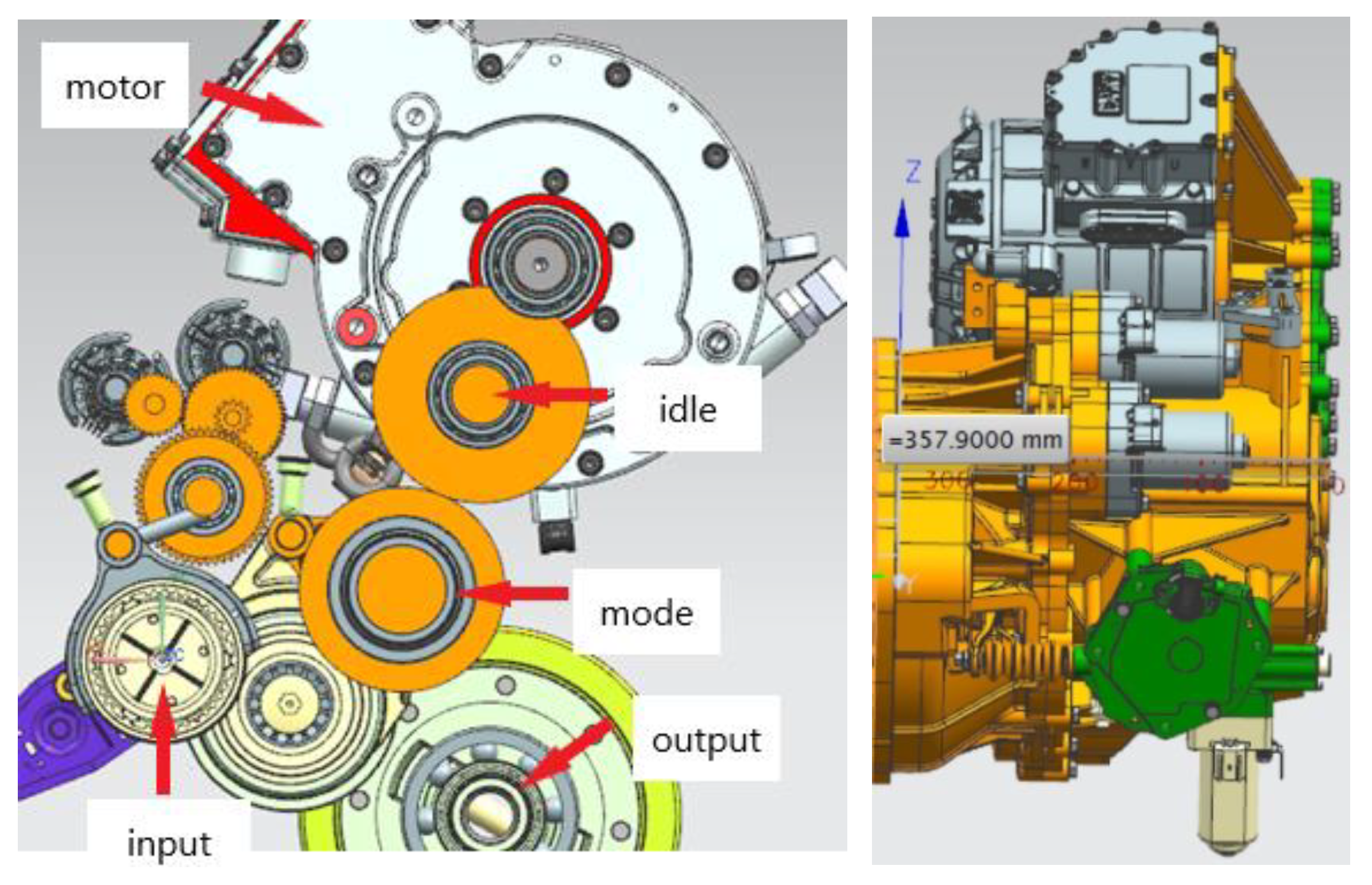
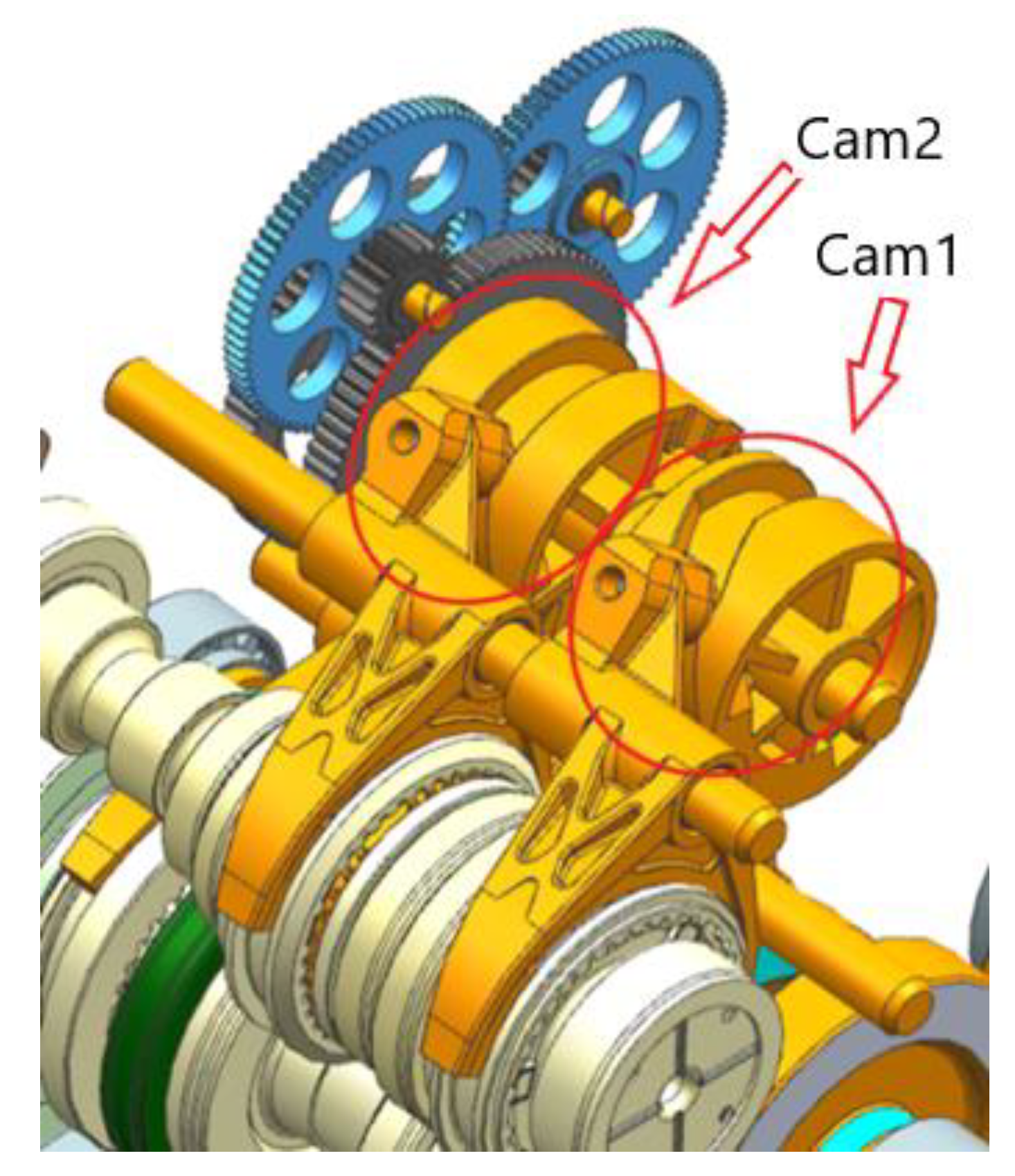
3.1. Transmission Configuration
- Based on fixed axis gears and AMT technology, the industrialization foundation is good.
- Both P2 and P3 modes are considered, and the functions are complete.
- There is no power interruption during shifting in P3 mode.
- Multiple gears can make the engine more efficient.
- Multiple gears can improve the power density and torque density of the motor.
3.2. Working Modes
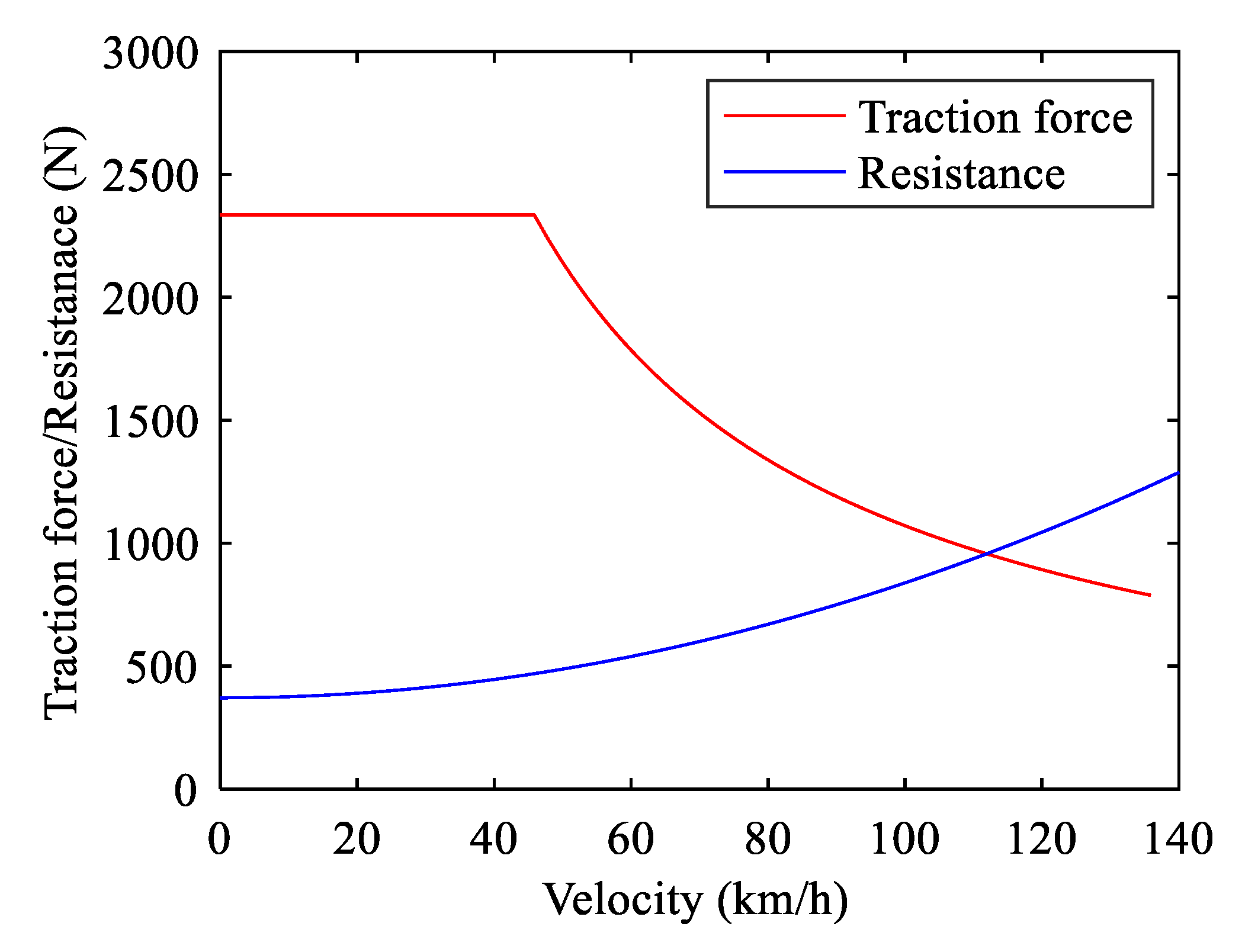
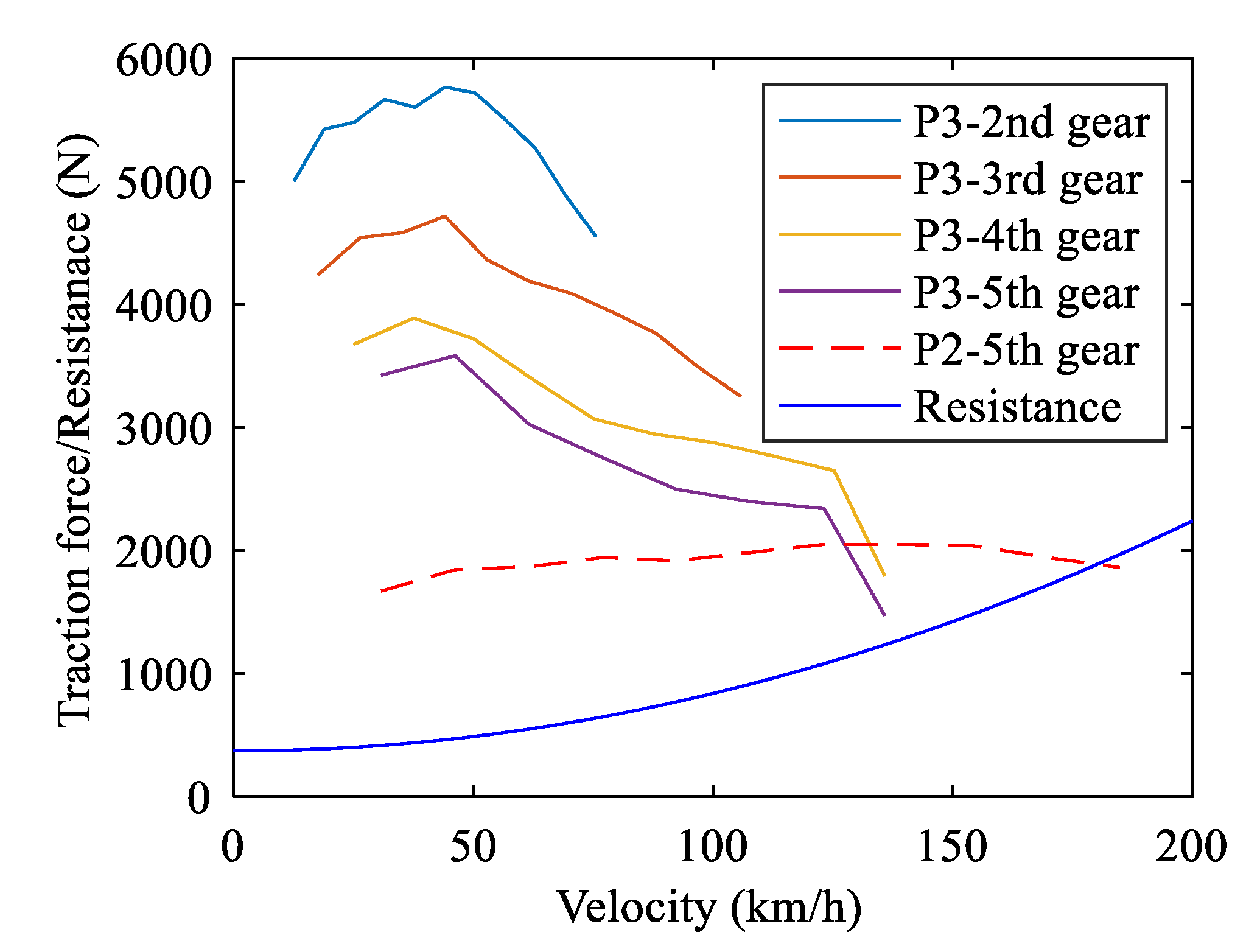
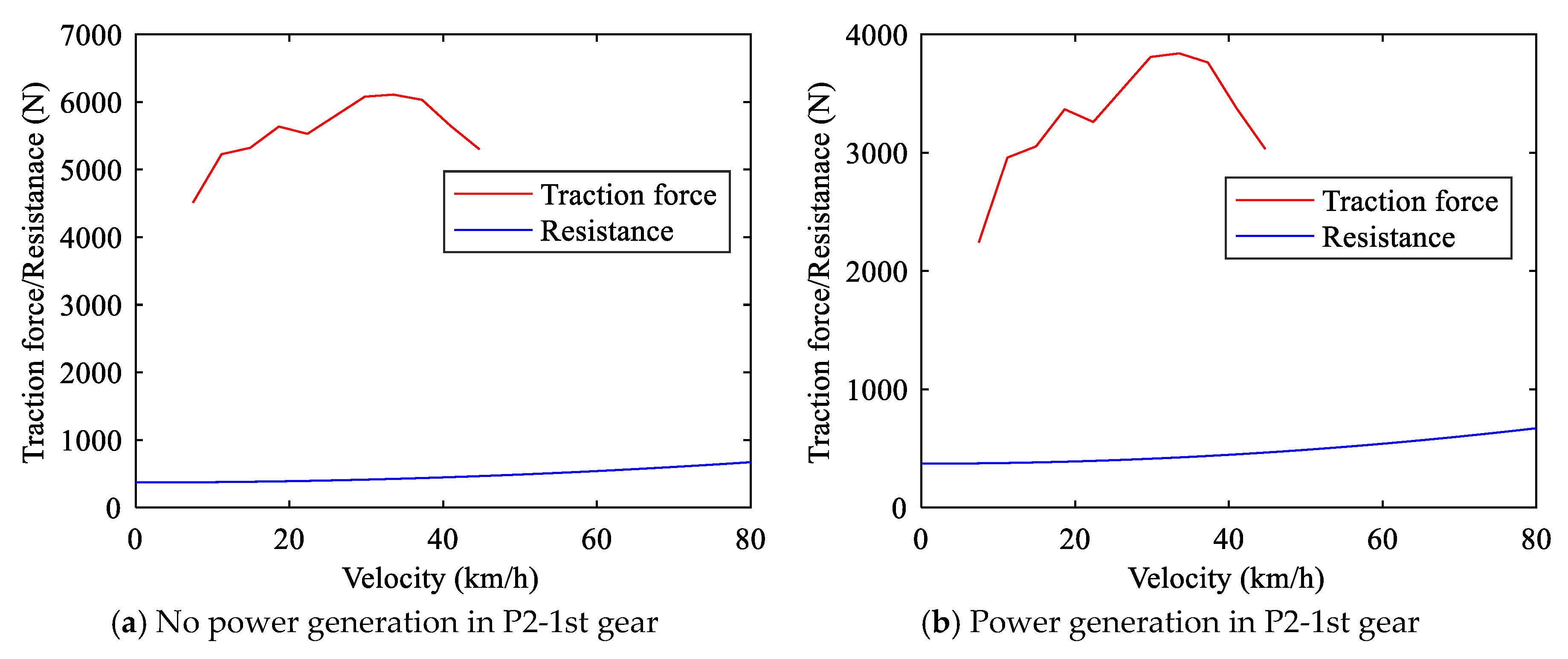
3.3. Gear Ratio Design
- The mechanical gear ratio design takes into account both pure mechanical driving and hybrid driving.
- The center distances of the coupling shaft and the output shaft in P2 and P3 modes are the same.
- The motor is as close as possible to the transmission.
- The second/third/fourth/fifth gears in the P3 mode meet daily driving needs.
- The first gear in the P2 and P3 modes meet extreme conditions, such as maximum climbing.
4. Prototyping and Verification
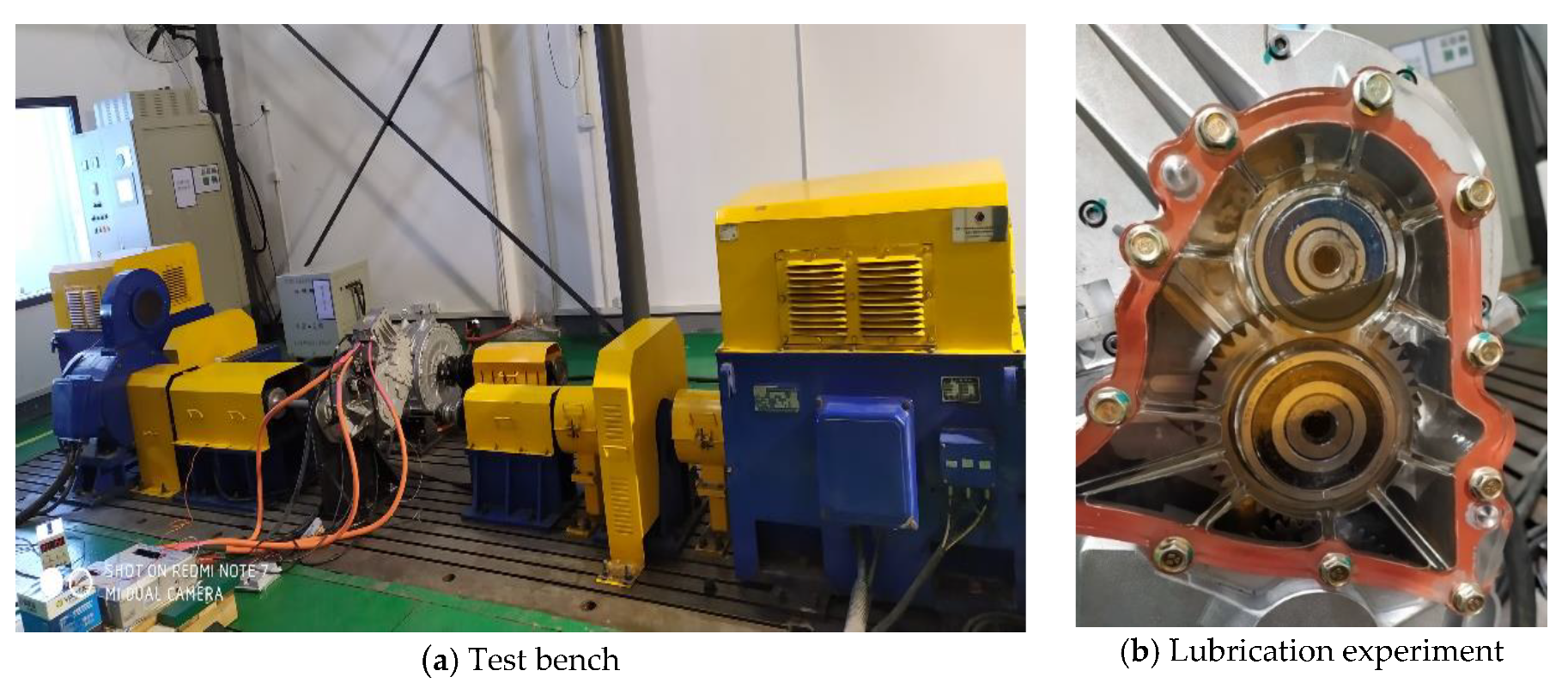
4.1. EMT prototyping
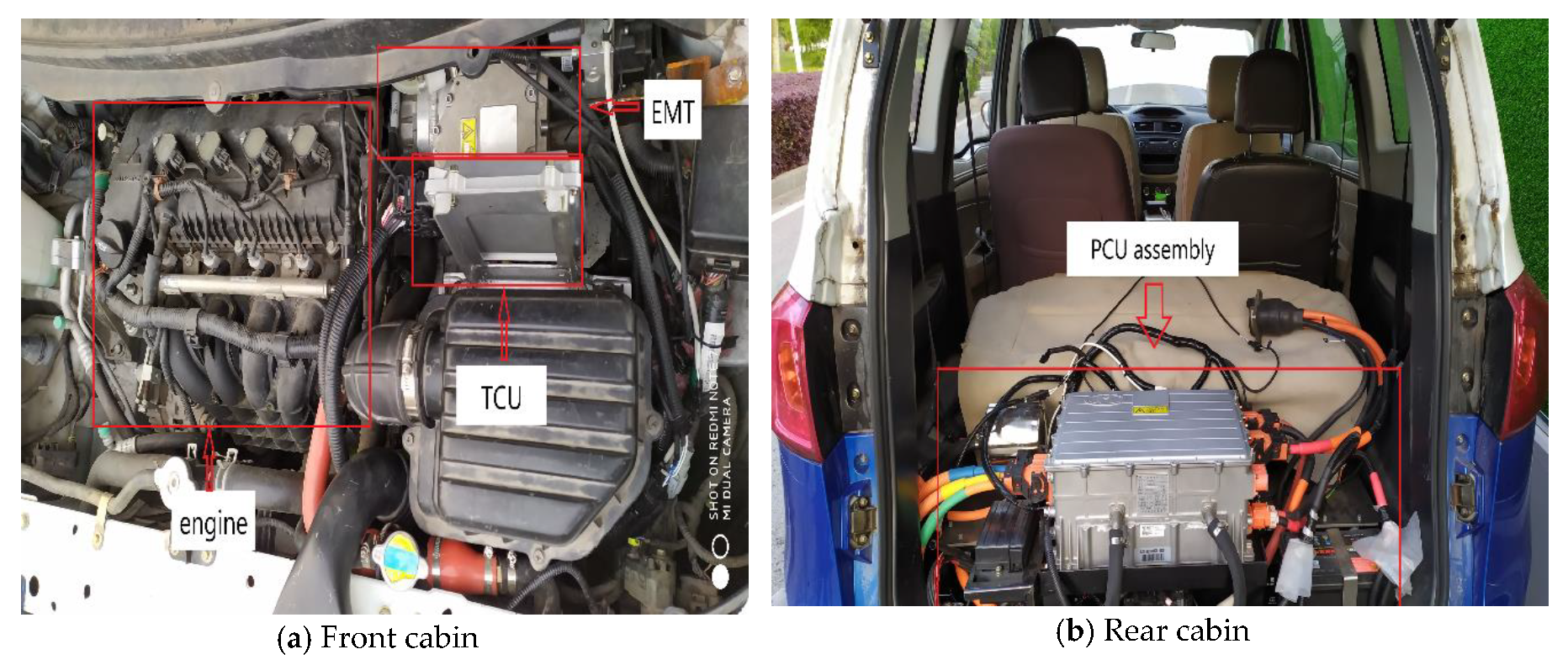
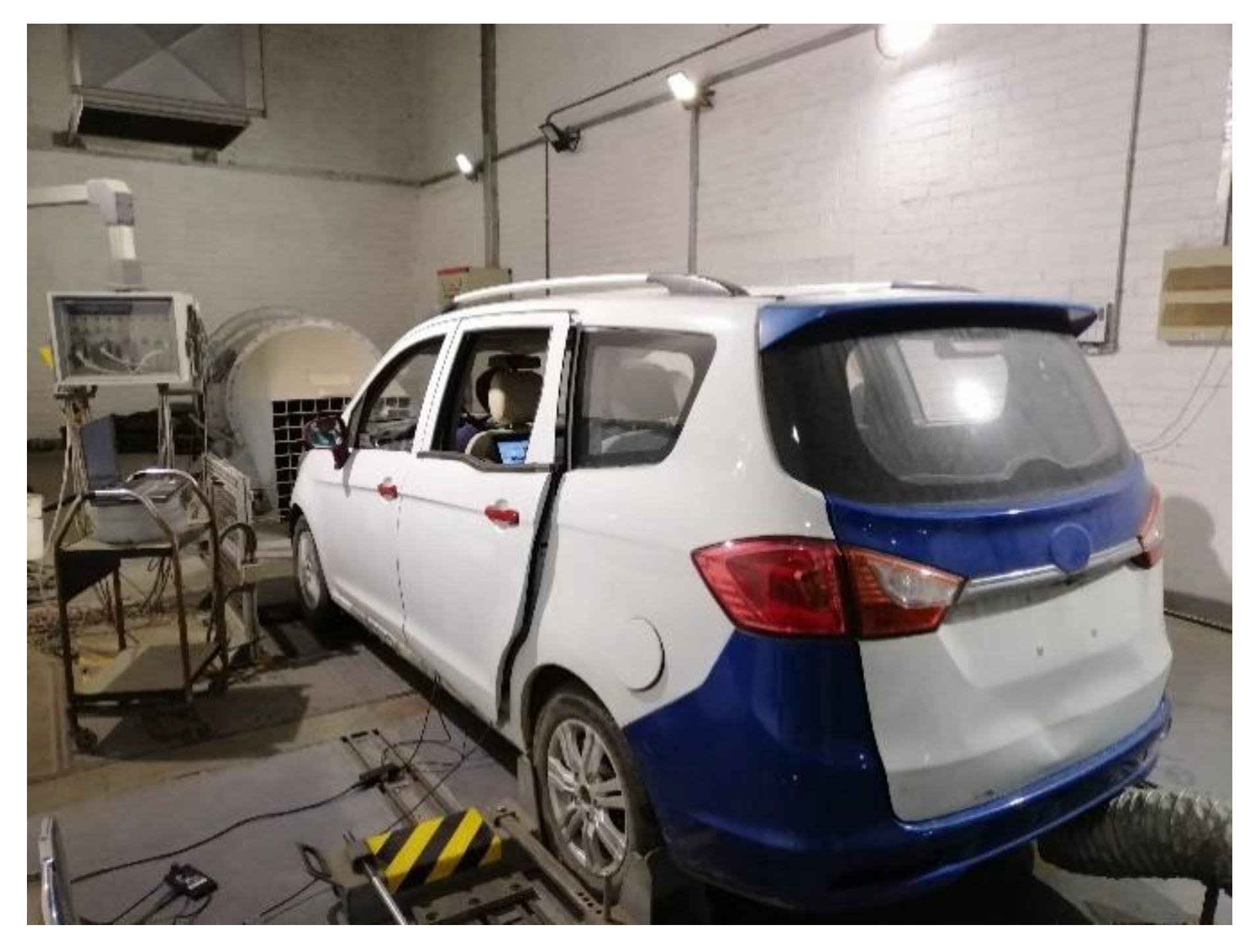
4.2. EMT and Vehicle Test
5. Conclusions
- The power demand and energy demand of PHEVs can be decoupled. In the distribution of engine and motor power, the engine just needs to meet the vehicle’s constant driving power, and the backup power can be provided by the motor, which means we can use an engine with a smaller power rating. Compared with EV, PHEV can easily meet the needs of short-distance travel and long-distance travel with a small battery capacity.
- The scheme is based on the AMT, with a single motor parallel design, using P3 as the basic working mode and setting the P2 mode at the same time. The energy of short-distance travel is mainly provided by the motor, which can make full use of the battery, reducing fuel consumption. The energy of long-distance travel is mainly provided by the engine, which can reduce the need for battery capacity. So, the energy of daily driving is provided by the battery, while the backup energy for long-distance driving is provided by the engine.
- Compared with the experimental results of unmodified vehicles, it is found that the vehicle’s economy has been improved, and the fuel-saving rate of 100 km has been achieved at 35.18% ((8.30 − 5.38)/8.30 ≈ 0.3518). The prototype’s dynamic and economical tests validate the design’s effectiveness.
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Z.; Guan, D.; Crawford-Brown, D.; Zhang, Q.; He, K.; Liu, J. A low-carbon road map for China. Nature 2013, 500, 143. [Google Scholar] [CrossRef] [PubMed]
- Hao, H.; Ou, X.; Du, J.; Wang, H.; Ouyang, M. China’s electric vehicle subsidy scheme: Rationale and impacts. Energy Policy 2014, 73, 722–732. [Google Scholar] [CrossRef]
- Du, J.; Ouyang, M.; Chen, J. Prospects for Chinese electric vehicle technologies in 2016 e 2020: Ambition and rationality. Energy 2020, 120, 584–596. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, X.; Dong, Z. Powertrain architectures of electrified vehicles: Review, classification and comparison. J. Frankl. Inst. 2015, 352, 425–448. [Google Scholar]
- Markel, T.; Simpson, A. Cost-Benefit Analysis of Plug-In Hybrid Electric Vehicle Technology. World Electr. Veh. J. 2007, 1, 294–301. [Google Scholar] [CrossRef]
- Amjad, S.; Neelakrishnan, S.; Rudramoorthy, R. Review of design considerations and technological challenges for successful development and deployment of plug-in hybrid electric vehicles. Renew. Sustain. Energy Rev. 2010, 14, 1104–1110. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid Electric Vehicles: Architecture and Motor Drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Chan, C.C.; Bouscayrol, A.; Chen, K. Electric, Hybrid, and Fuel-Cell Vehicles: Architectures and Modeling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Conlon, B.M.; Blohm, T.; Harpster, M.; Holmes, A.; Palardy, M.; Tarnowsky, S.; Zhou, L. The Next Generation “Voltec” Extended Range EV Propulsion System. SAE Int. J. Alt. Power. 2015, 4, 248–259. [Google Scholar] [CrossRef]
- Rahman, K.M.; Jurkovic, S.; Stancu, C.; Morgante, J.; Savagian, P.J. Design and Performance of Electrical Propulsion System of Extended Range Electric Vehicle (EREV) Chevrolet Volt. IEEE Trans. Ind. Appl. 2015, 51, 2479–2488. [Google Scholar] [CrossRef]
- Jelden, H.; Pelz, N.; Haußmann, H.; Kloft, M. The Plug-in Hybrid Drive of the VW Passat GTE. MTZ Worldw. 2015, 76, 16–23. [Google Scholar] [CrossRef]
- Neusser, H.-J.; Jelden, H.; Bühring, K.; Philipp, K. The Powertrain of the Jetta Hybrid from Volkswagen. MTZ Worldw. 2013, 74, 4–11. [Google Scholar] [CrossRef]
- Meisel, J. An Analytic Foundation for the Toyota Prius THS-II Powertrain with a Comparison to a Strong Parallel Hybrid-Electric Powertrain. In Proceedings of the SAE 2006 World Congress & Exhibition, Detroit, MI, USA, 3–6 April 2006. [Google Scholar]
- Yang, Y.; Hu, X.; Pei, H.; Peng, Z. Comparison of power-split and parallel hybrid powertrain architectures with a single electric machine: Dynamic programming approach. Appl. Energy 2016, 168, 683–690. [Google Scholar] [CrossRef]
- Kim, J.; Kim, N.; Hwang, S.; Hori, Y.; Kim, H. Motor control of input-split hybrid electric vehicles. Int. J. Automot. Technol. 2009, 10, 733. [Google Scholar] [CrossRef]
- Zhang, X.; Li, S.E.; Peng, H.; Sun, J. Design of Multimode Power-Split Hybrid Vehicles—A Case Study on the Voltec Powertrain System. IEEE Trans. Veh. Technol. 2016, 65, 4790–4801. [Google Scholar] [CrossRef]
- Zhang, X.; Li, C.; Kum, D.; Peng, H. Prius+ and Volt-: Configuration Analysis of Power-Split Hybrid Vehicles With a Single Planetary Gear. IEEE Trans. Veh. Technol. 2012, 61, 3544–3552. [Google Scholar] [CrossRef]
- Cornils, H. Medium-Duty Plug-in Hybrid Electric Vehicle for Utility Fleets. SAE Int. J. Commer. Veh. 2010, 3, 90–100. [Google Scholar] [CrossRef]
- Baseley, S.; Smaling, R.M.; Hu, H. Advanced Hybrid Powertrains for Commercial Vehicles; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Modes/gears | Descriptions |
|---|---|---|
| Launch | P3 mode | Normally, the vehicle power is provided only by the motor. |
| EV mode | P3 mode | No shift |
| HEV mode | P3 mode second/third/fourth /fifth gear | EMT works in P3 mode, and the mechanical gear is second/third/fourth /fifth gear depending on speed. When the mechanical gear shifts, the motor provides power through P3 mode, without power interruption. |
| High-speed mode | P2 mode fifth gear | EMT works in P2 mode, and the mechanical gear is fifth gear. When the P2/P3 mode shifts, the engine drives the vehicle in fifth gear, without power interruption. |
| Parking charge mode | P2 mode neutral gear | Parking charging (charging the power battery or supplying power to the outside) |
| Limp mode | P2 mode first gear | Dealing with power system failures and extreme conditions |
| Modes/Gears | Gear Ratio |
|---|---|
| First gear | 3.462 |
| Second gear | 2.048 |
| Third gear | 1.464 |
| Fourth gear | 1.03 |
| Fifth gear | 0.838 |
| P3 mode | 2.0889 |
| P2 mode | 1.7594 |
| Final drive ratio | 4.529 |
| Mode | Index | Test results |
|---|---|---|
| HEV mode | Maximum velocity | ≥160 km/h |
| Maximum slope | ≥30% | |
| 0~100 km/h acceleration time | ≤12 s | |
| Fuel consumption per hundred kilometers | 5.38 L/100 km | |
| EV mode | Maximum velocity | ≥130 km/h |
| Maximum slope | ≥30% | |
| 0~100 km/h acceleration time | ≤17 s | |
| Pure electric driving range | ≥50 km |
| Index | Test Results |
|---|---|
| Fuel consumption per hundred kilometers | 8.30 L/100 km |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhen, Y.; Bao, Y.; Zhong, Z.; Rinderknecht, S.; Zhou, S. Development of a PHEV Hybrid Transmission for Low-End MPVs Based on AMT. Vehicles 2020, 2, 236-248. https://doi.org/10.3390/vehicles2020013
Zhen Y, Bao Y, Zhong Z, Rinderknecht S, Zhou S. Development of a PHEV Hybrid Transmission for Low-End MPVs Based on AMT. Vehicles. 2020; 2(2):236-248. https://doi.org/10.3390/vehicles2020013
Chicago/Turabian StyleZhen, Yongcheng, Yong Bao, Zaimin Zhong, Stephan Rinderknecht, and Song Zhou. 2020. "Development of a PHEV Hybrid Transmission for Low-End MPVs Based on AMT" Vehicles 2, no. 2: 236-248. https://doi.org/10.3390/vehicles2020013
APA StyleZhen, Y., Bao, Y., Zhong, Z., Rinderknecht, S., & Zhou, S. (2020). Development of a PHEV Hybrid Transmission for Low-End MPVs Based on AMT. Vehicles, 2(2), 236-248. https://doi.org/10.3390/vehicles2020013