Simulation Analysis of Mode Hopping Impacts on OFDR Sensing Performance

 ,
,  ,
,  ,
,  , ,
, , 
Abstract
1. Introduction
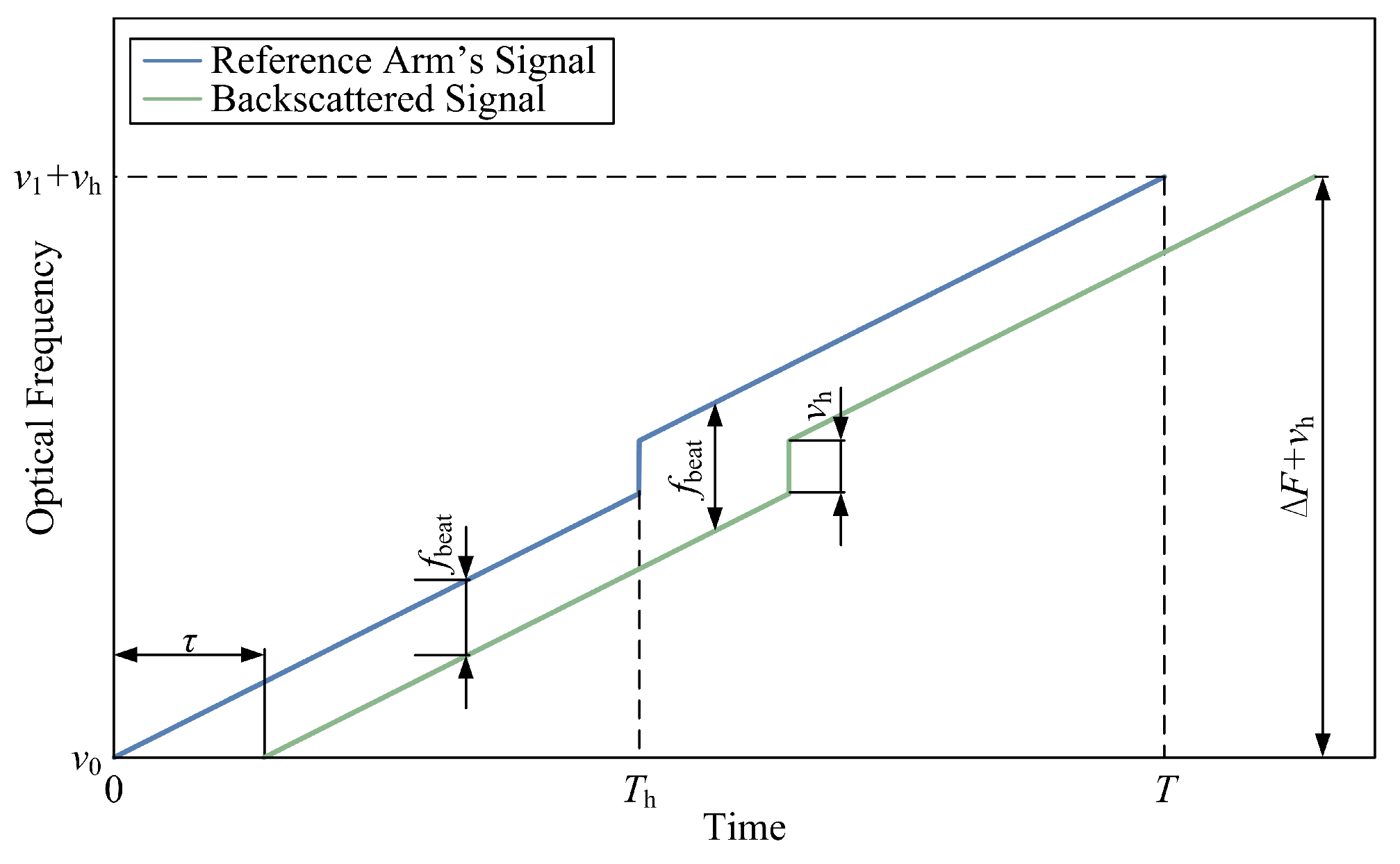
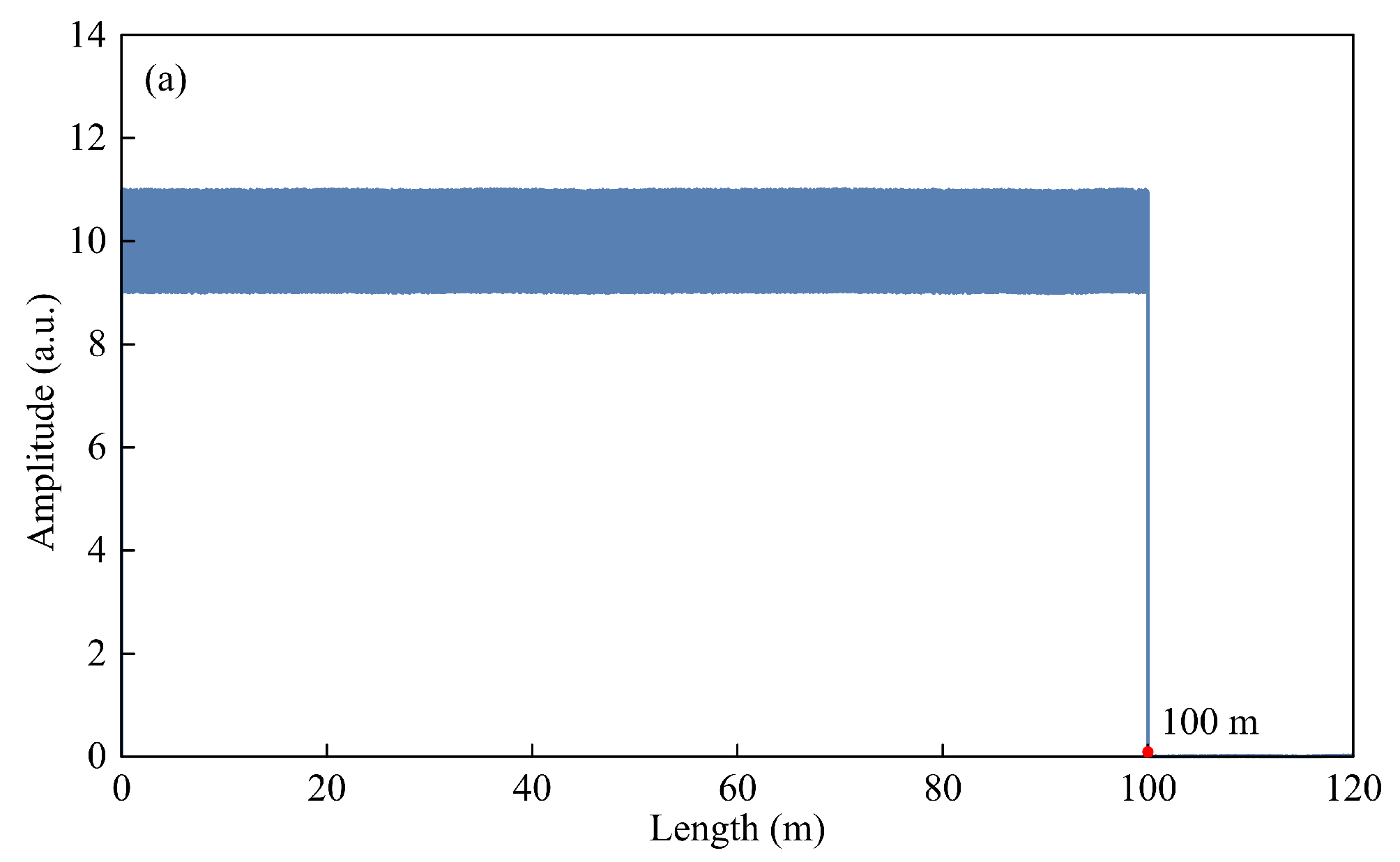
2. OFDR LiDAR Distance Sensing Simulations
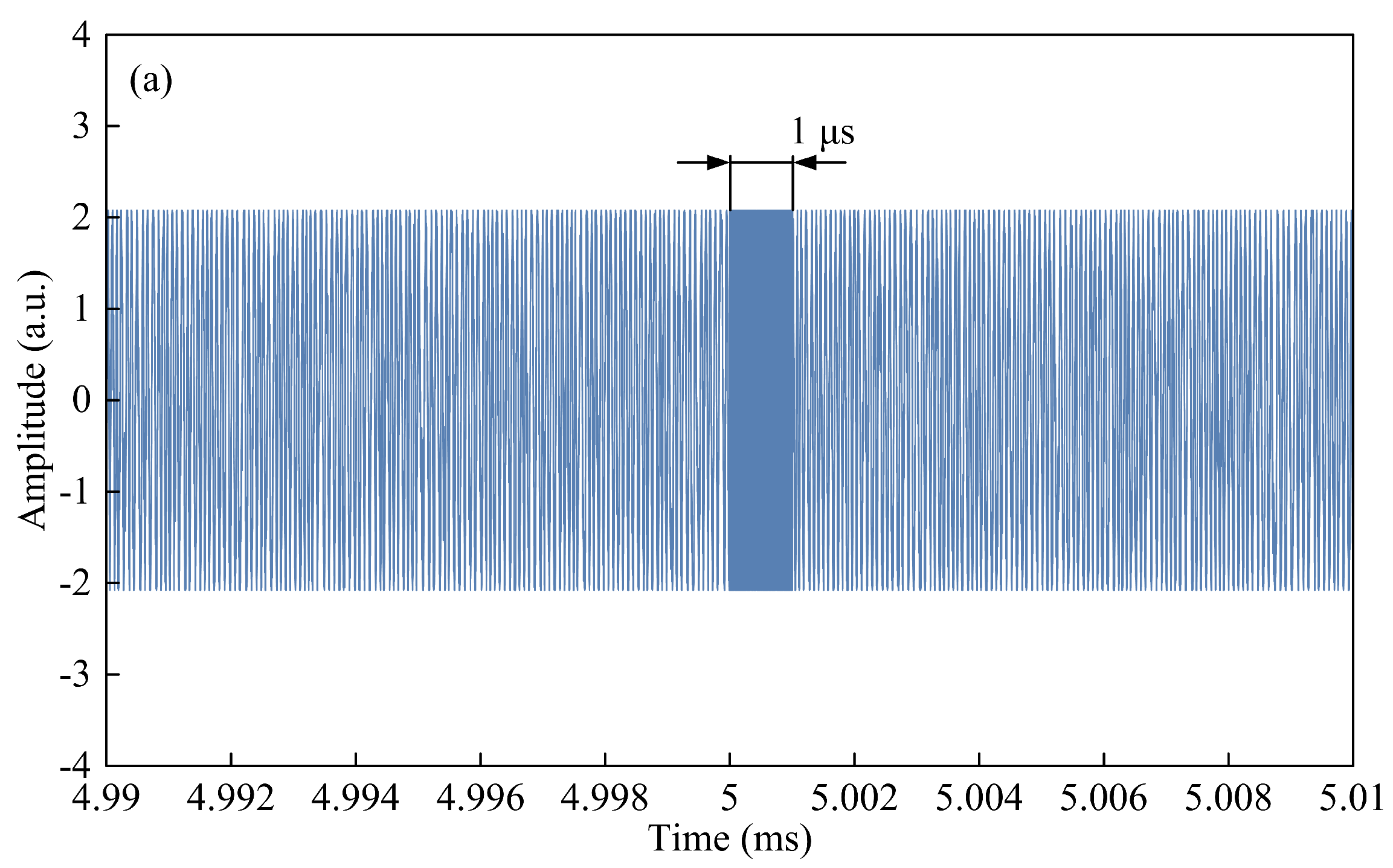
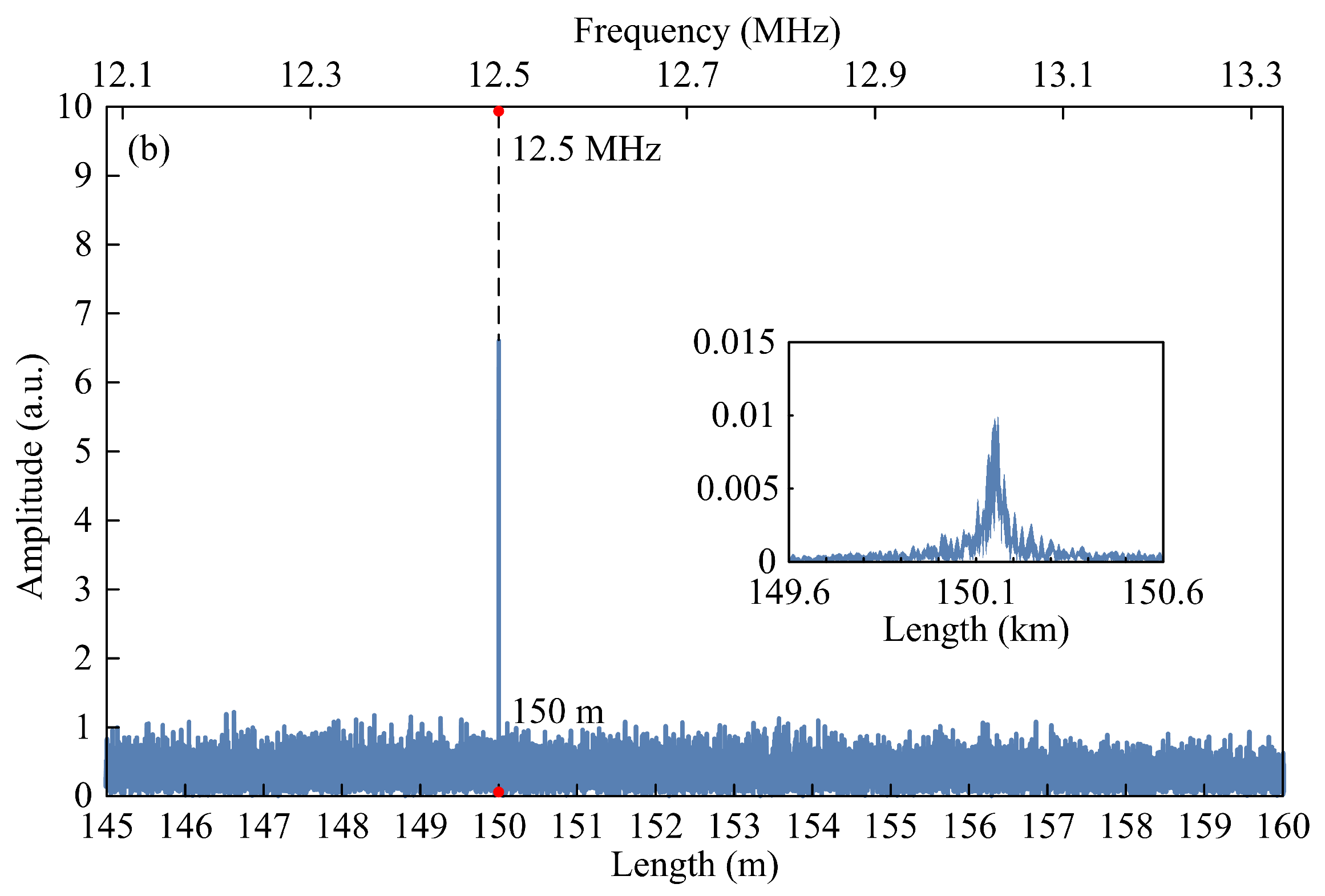
2.1. Distance Sensing without Mode Hopping
2.2. Distance Sensing with Mode Hopping
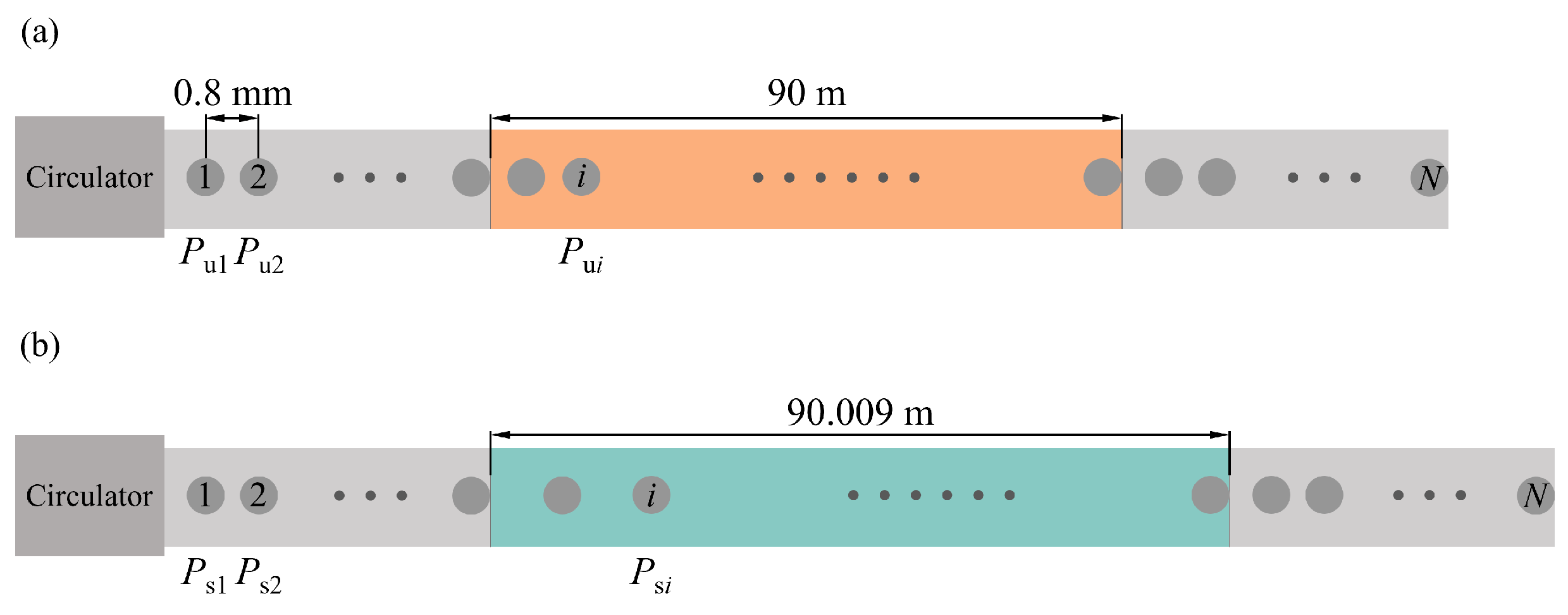
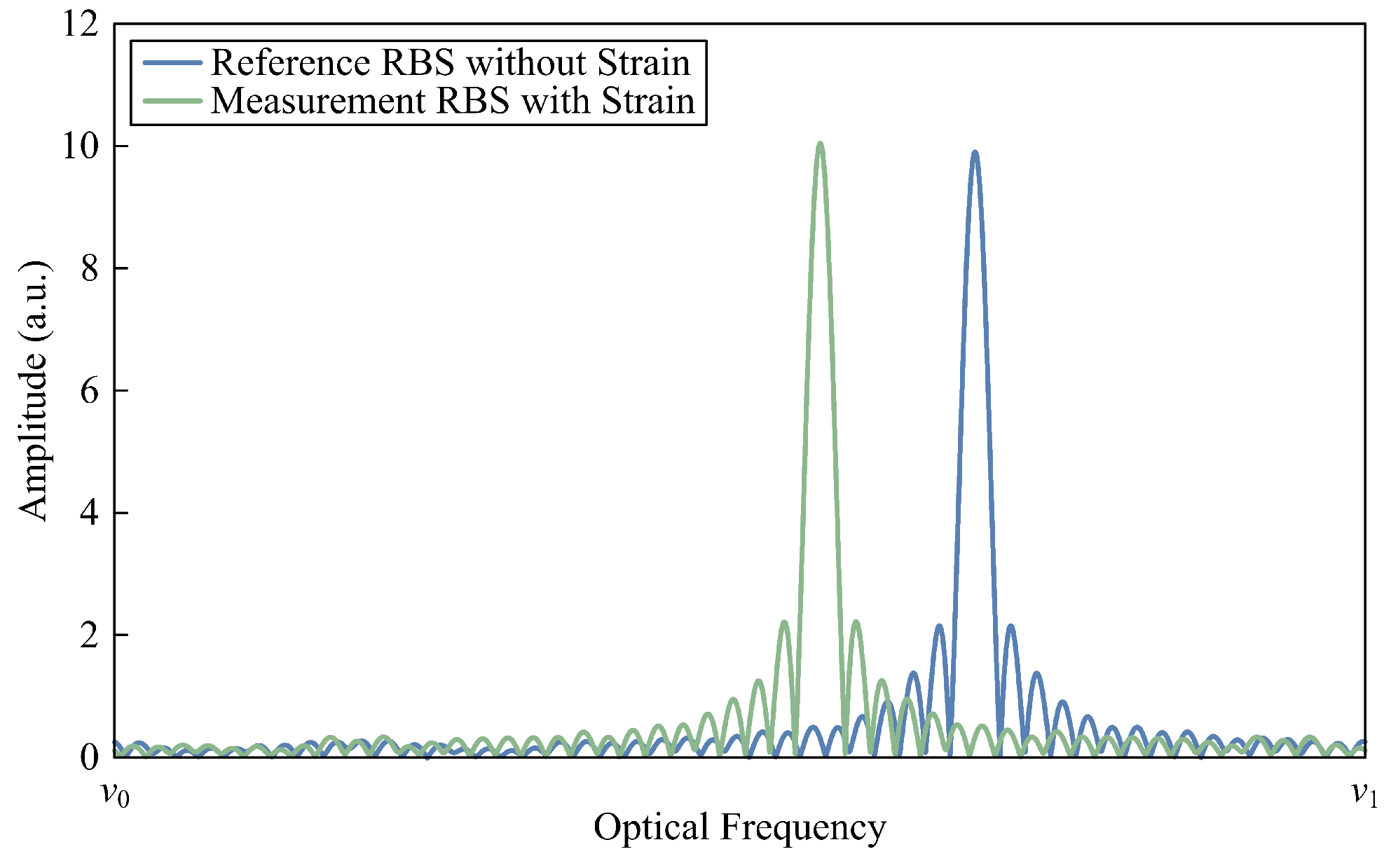
3. Distributed Strain Sensing Simulations
3.1. Strain Sensing without Mode Hopping
3.2. Strain Sensing with Mode Hopping
4. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Ohanian, O.J.; Yakusheva, A.A.; Kreger, S.T.; Kominsky, D.; Soller, B.J.; Tran, M.; Komljenovic, T.; Bowers, J.E. OFDR on photonic circuits: Fiber optic sensing infrastructure and applications. In Proceedings of the 26th International Conference on Optical Fiber Sensors, Lausanne, Switzerland, 24–28 September 2018. [Google Scholar]
- Badar, M.; Lu, P.; Wang, Q.; Boyer, T.; Chen, K.P.; Ohodnicki, P. Real-time optical fiber-based distributed temperature monitoring of insulation oil-immersed commercial distribution power transformer. IEEE Sens. J. 2021, 21, 3013–3019. [Google Scholar] [CrossRef]
- Lalam, N.; Lu, P.; Lu, F.; Hong, T.; Badar, M.; Buric, M. Distributed carbon dioxide sensor based on sol-gel silica-coated fiber and optical frequency domain reflectometry (OFDR). In ODS 2020: Industrial Optical Devices and Systems; SPIE: Bellingham, WA, USA, 2020. [Google Scholar]
- Badar, M.; Lu, P.; Wang, Q.; Boyer, T.; Chen, K.P.; Ohodnicki, P. Monitoring internal power transformer temperature using distributed optical fiber sensors. In Optical Waveguide and Laser Sensors; SPIE: Bellingham, WA, USA, 2020. [Google Scholar]
- Iida, D.; Honda, N.; Oshida, H. Advances in distributed vibration sensing for optical communication fiber state visualization. Opt. Fiber Technol. 2020, 57, 102263. [Google Scholar] [CrossRef]
- Barrias, A.; Casas, J.R.; Villalba, S. Fatigue performance of distributed optical fiber sensors in reinforced concrete elements. Constr. Build. Mater. 2019, 218, 214–223. [Google Scholar] [CrossRef]
- Liu, Q.; Fan, X.; He, Z. Time-gated digital optical frequency domain reflectometry with 1.6-m spatial resolution over entire 110-km range. Opt. Express 2015, 23, 25988–25995. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Deng, L.; Yang, K.; Liang, W. Narrow linewidth external cavity laser capable of high repetition frequency tuning for FMCW LiDAR. IEEE Photonics Technol. Lett. 2022, 34, 1123–1126. [Google Scholar] [CrossRef]
- Huang, S.; Zhu, T.; Yin, G.; Lan, T.; Li, F.; Huang, L.; Liu, M. Dual-cavity feedback assisted DFB narrow linewidth laser. Sci. Rep. 2017, 7, 1185. [Google Scholar] [CrossRef] [PubMed]
- Virtanen, H.; Uusitalo, T.; Karjalainen, M.; Ranta, S.; Viheriälä, J.; Dumitrescu, M. Narrow-linewidth 780-nm DFB lasers fabricated using nanoimprint lithography. IEEE Photonics Technol. Lett. 2018, 30, 51–54. [Google Scholar] [CrossRef]
- Wang, Z.; Jeon, I.; Ahn, C.; Kim, J. Narrow linewidth, arbitrarily tuning DFB laser using 3 × 3 optical coupler-based fully digital feedback. J. Light. Technol. 2024, 42, 3820–3825. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, K.; Badar, M.; Lu, P.; Zhao, J.; Li, Y.; Chen, K.P. Low-cost OFDR distributed fiber sensing enabled by fiber with enhanced Rayleigh backscattering. In Proceedings of the Conference on Lasers and Electro-Optics (CLEO), San Jose, CA, USA, 9–14 May 2021. [Google Scholar]
- Chinone, N.; Kuroda, T.; Ohtoshi, T.; Takahashi, T.; Kajimura, T. Mode-hopping noise in index-guided semiconductor lasers and its reduction by saturable absorbers. IEEE J. Quantum Electron. 1985, 21, 1264–1270. [Google Scholar] [CrossRef]
- Heumier, T.A. Mode Hopping in Semiconductor Lasers. Ph.D. Dissertation, Montana State University, Bozeman, MT, USA, 1992. [Google Scholar]
- Zhang, Y.; Yang, F.; Liu, G.; Li, G.; Xiang, M.; Lu, Q.; Donegan, J.F.; Guo, W. Experimental demonstration of an easy-to-fabricate 1.3-µm directly modulated DFB laser with improved beam profile. J. Light. Technol. 2023, 41, 3094–3101. [Google Scholar] [CrossRef]
- Kasai, K.; Nakazawa, M.; Tomomatsu, Y.; Endo, T. 1.5 µm, mode-hop-free full C-band wavelength tunable laser diode with a linewidth of 8 kHz and a RIN of −130 dB/Hz and its extension to the L-band. Opt. Express 2017, 25, 22113–22124. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Shi, Y.; Li, J.; Liu, S.; Xiao, R.; Li, L.; Lu, J.; Chen, X. A cascaded tunable DFB semiconductor laser with compact structure. IEEE J. Quantum Electron. 2018, 54, 2200111. [Google Scholar] [CrossRef]
- Pintus, P.; Guo, J.; Tran, M.A.; Jin, W.; Liang, J.; Peters, J.; Xiang, C.; Ohanian, O.J.; Bowers, J.E. Demonstration of large mode-hop-free tuning in narrow-linewidth heterogeneous integrated laser. J. Light. Technol. 2023, 41, 6723–6734. [Google Scholar] [CrossRef]
- Badar, M.; Lu, P.; Wang, M.; Wang, Q.; Chen, K.P.; Buric, M.; Ohodnicki, P. Integrated auxiliary interferometer to correct non-linear tuning errors in OFDR. In Optical Waveguide and Laser Sensors; SPIE: Bellingham, WA, USA, 2020. [Google Scholar]
- Wang, Q.; Zhao, K.; Badar, M.; Yi, X.; Lu, P.; Buric, M.; Mao, Z.H.; Chen, K.P. Improving OFDR distributed fiber sensing by fibers with enhanced Rayleigh backscattering and image processing. IEEE Sens. J. 2022, 22, 18471–18478. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, Y.; Huo, J.; Shieh, W. Theoretical analysis of phase noise induced by laser linewidth and mismatch length in self-homodyne coherent systems. J. Light. Technol. 2021, 39, 1312–1321. [Google Scholar] [CrossRef]
- Kiiveri, P.; Kuusisto, M.; Koponen, J.; Kimmelma, O.; Aallos, V.; Harra, J.; Husu, H.; Kyllönen, P. Refractive index profiles and propagation losses in bent optical fibers. Opt. Eng. 2022, 61, 126106. [Google Scholar] [CrossRef]
- Hill, K.O.; Meltz, G. Fiber Bragg grating technology fundamentals and overview. J. Light. Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef]
- Rao, Y. In-fibre Bragg grating sensors. Meas. Sci. Technol. 1997, 8, 355–375. [Google Scholar] [CrossRef]
- OBR 4600 Optical Backscatter Reflectometer, OBR 4600 Datasheet; Luna Innovations: Blacksburg, VA, USA, 2019.
- Soto, M.A.; Ramírez, J.A.; Thévenaz, L. Reaching millikelvin resolution in Raman distributed temperature sensing using image processing. In Sixth European Workshop on Optical Fibre Sensors; SPIE: Bellingham, WA, USA, 2016. [Google Scholar]
- Zhao, S.; Cui, J.; Wu, Z.; Tan, J. Accuracy improvement in OFDR-based distributed sensing system by image processing. Opt. Lasers Eng. 2020, 124, 105824. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, K.; Yi, X.; Zhao, J.; Zhong, S.; Chen, K.P. Low-cost OFDR distributed sensing based on optical fiber with enhanced Rayleigh backscattering profiles and median filtering. In Proceedings of the 27th International Conference on Optical Fiber Sensors, Alexandria, VA, USA, 29 August–2 September 2022. [Google Scholar]
- Soto, M.A.; Yang, Z.; Ramírez, J.A.; Zaslawski, S.; Thévenaz, L. Evaluating measurement uncertainty in Brillouin distributed optical fibre sensors using image denoising. Nat. Commun. 2021, 12, 4901. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Wavelength sweep range | N/A | 1549–1550 nm |
| Starting optical frequency | 193.414 THz | |
| Ending optical frequency | 193.539 THz | |
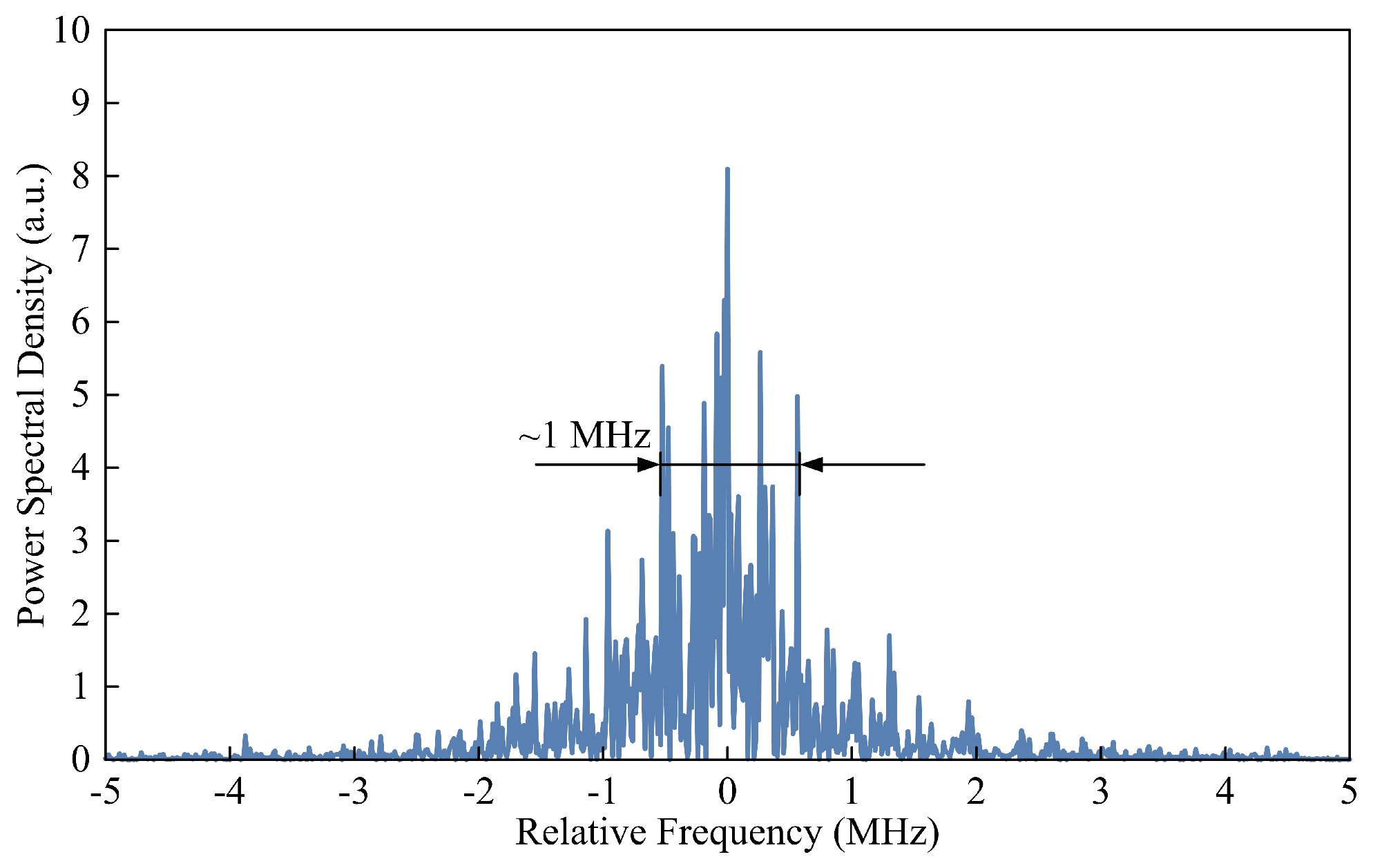
| Linewidth of the TL | or | 8 fm or 1 MHz |
| Duration of a sweep | T | 10 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Lalam, N.; Zhao, K.; Zhong, S.; Zhang, G.; Wright, R.; Chen, K.P. Simulation Analysis of Mode Hopping Impacts on OFDR Sensing Performance. Photonics 2024, 11, 580. https://doi.org/10.3390/photonics11060580
Wang Q, Lalam N, Zhao K, Zhong S, Zhang G, Wright R, Chen KP. Simulation Analysis of Mode Hopping Impacts on OFDR Sensing Performance. Photonics. 2024; 11(6):580. https://doi.org/10.3390/photonics11060580
Chicago/Turabian StyleWang, Qirui, Nageswara Lalam, Kehao Zhao, Shuda Zhong, Guangyin Zhang, Ruishu Wright, and Kevin P. Chen. 2024. "Simulation Analysis of Mode Hopping Impacts on OFDR Sensing Performance" Photonics 11, no. 6: 580. https://doi.org/10.3390/photonics11060580
APA StyleWang, Q., Lalam, N., Zhao, K., Zhong, S., Zhang, G., Wright, R., & Chen, K. P. (2024). Simulation Analysis of Mode Hopping Impacts on OFDR Sensing Performance. Photonics, 11(6), 580. https://doi.org/10.3390/photonics11060580